
Use of Drone RGB Imagery to Quantify Indicator Variables of Tropical-Forest-Ecosystem Degradation and Restoration

Abstract
:1. Introduction
2. Materials and Methods
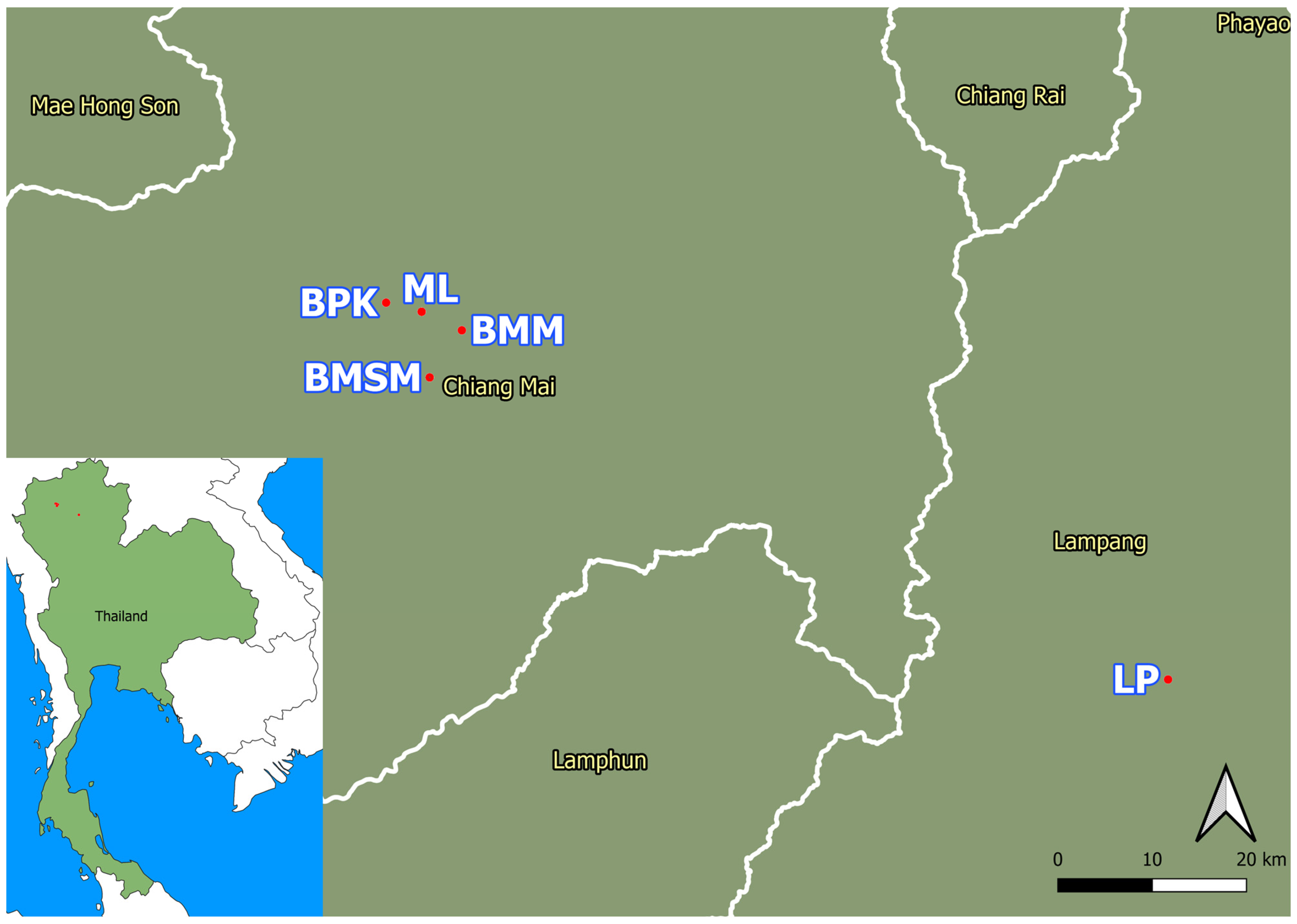
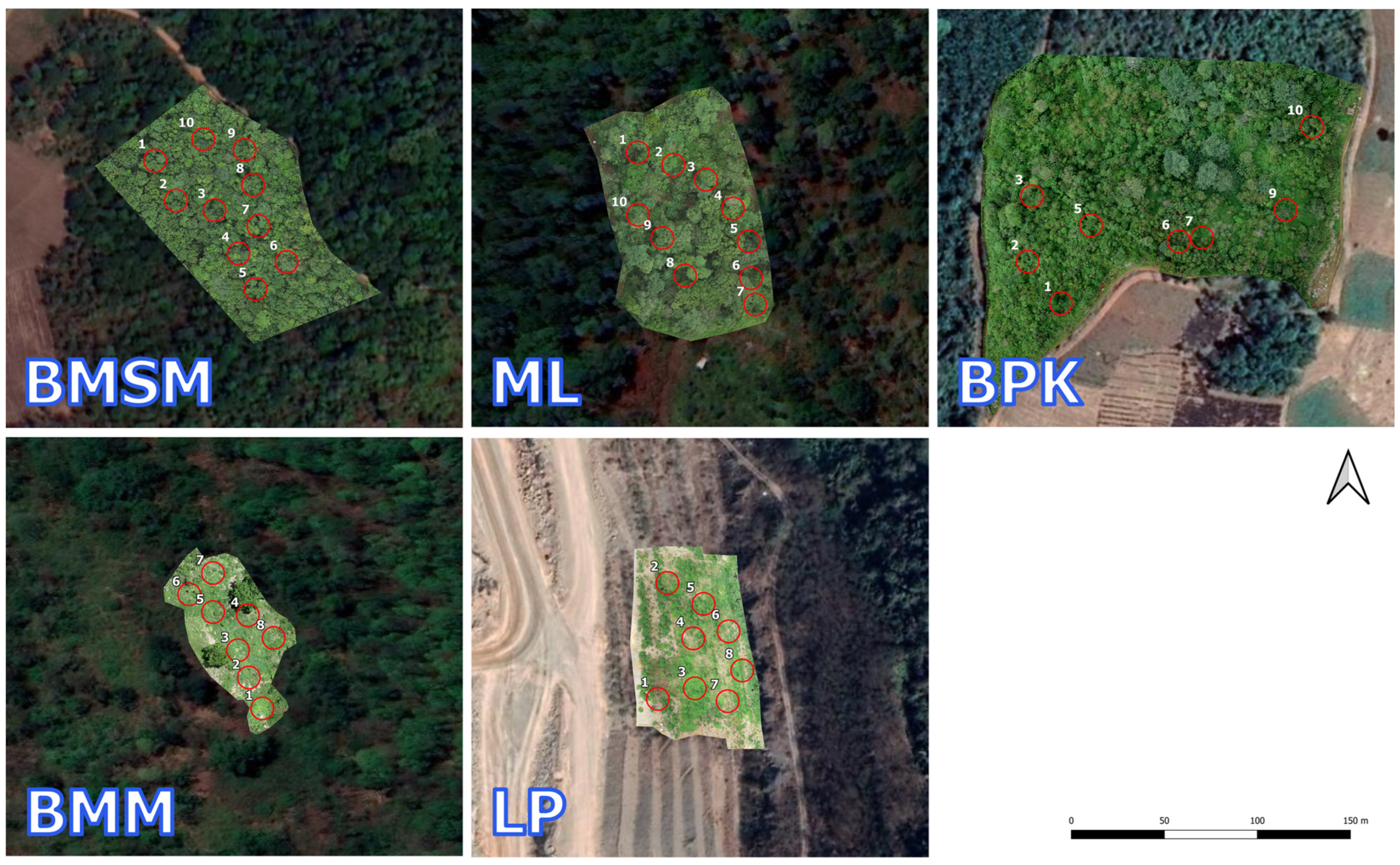
2.1. Study Sites and Equipment
2.2. Data Acquisition—Ground Surveys
2.3. Data Acquisition—UAV Aerial Image Acquisition
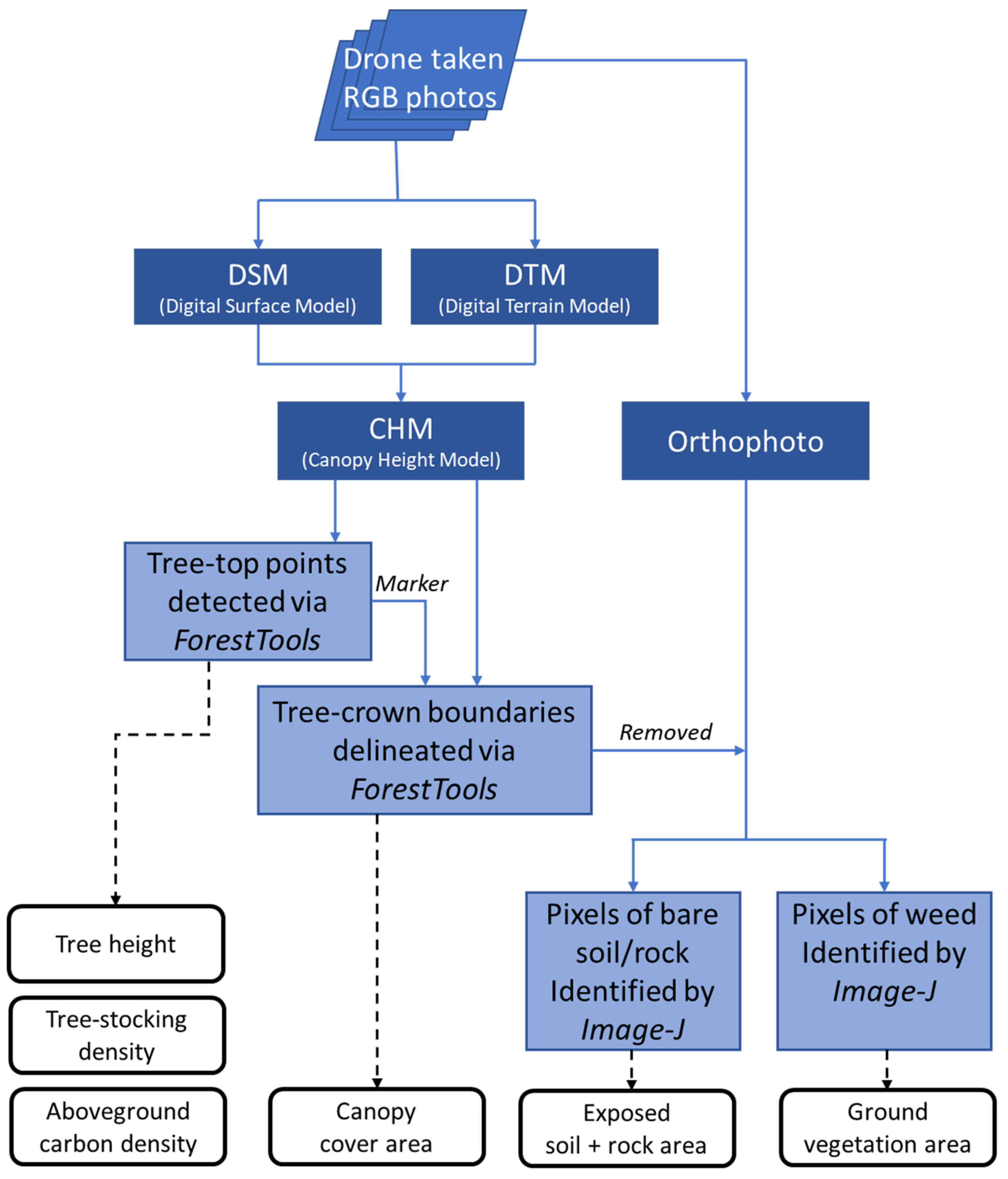
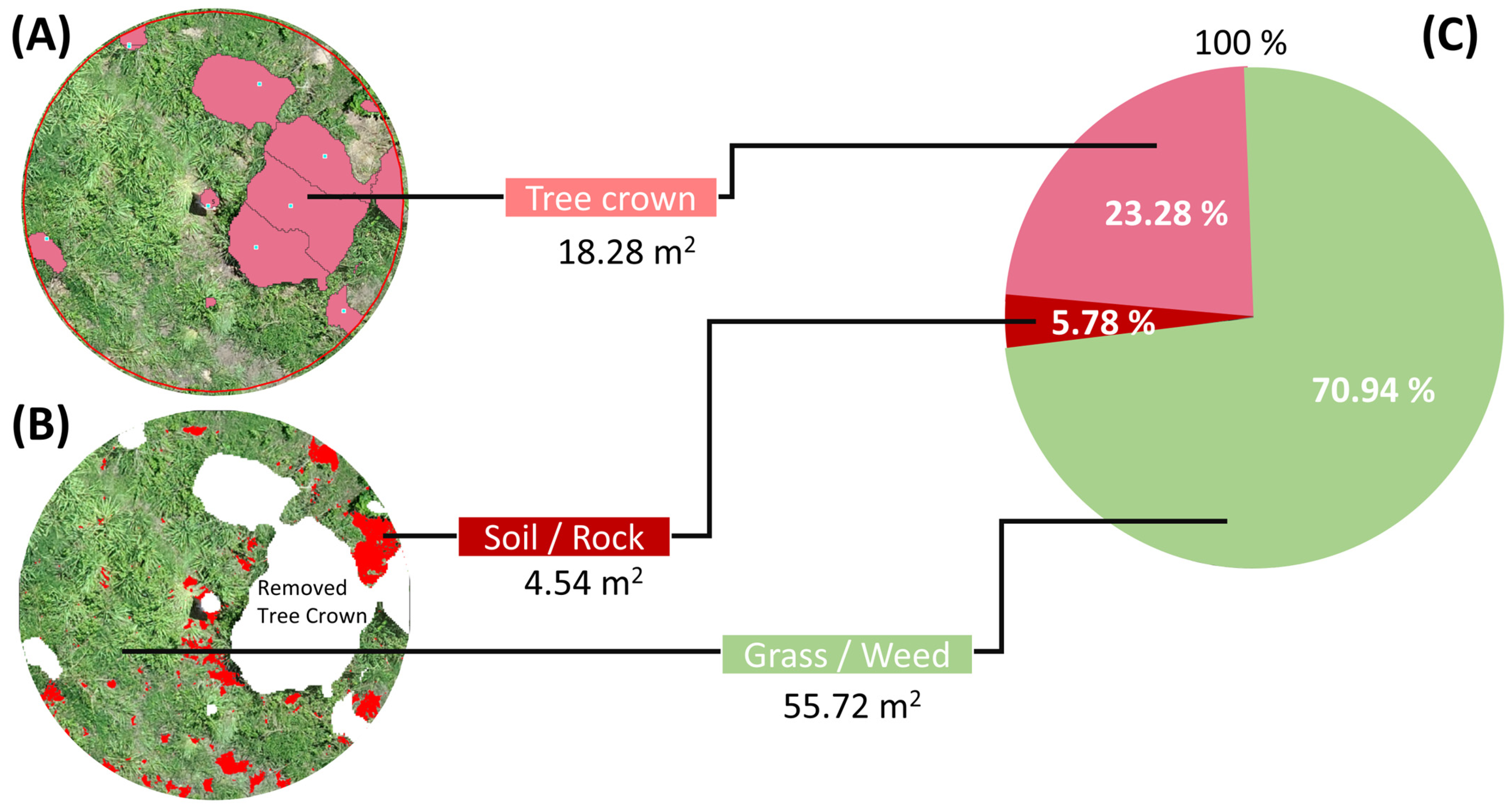
2.4. Data Processing and Analysis
2.5. Deriving Variable Values from Collected and Processed Data
2.6. Statistical Analysis
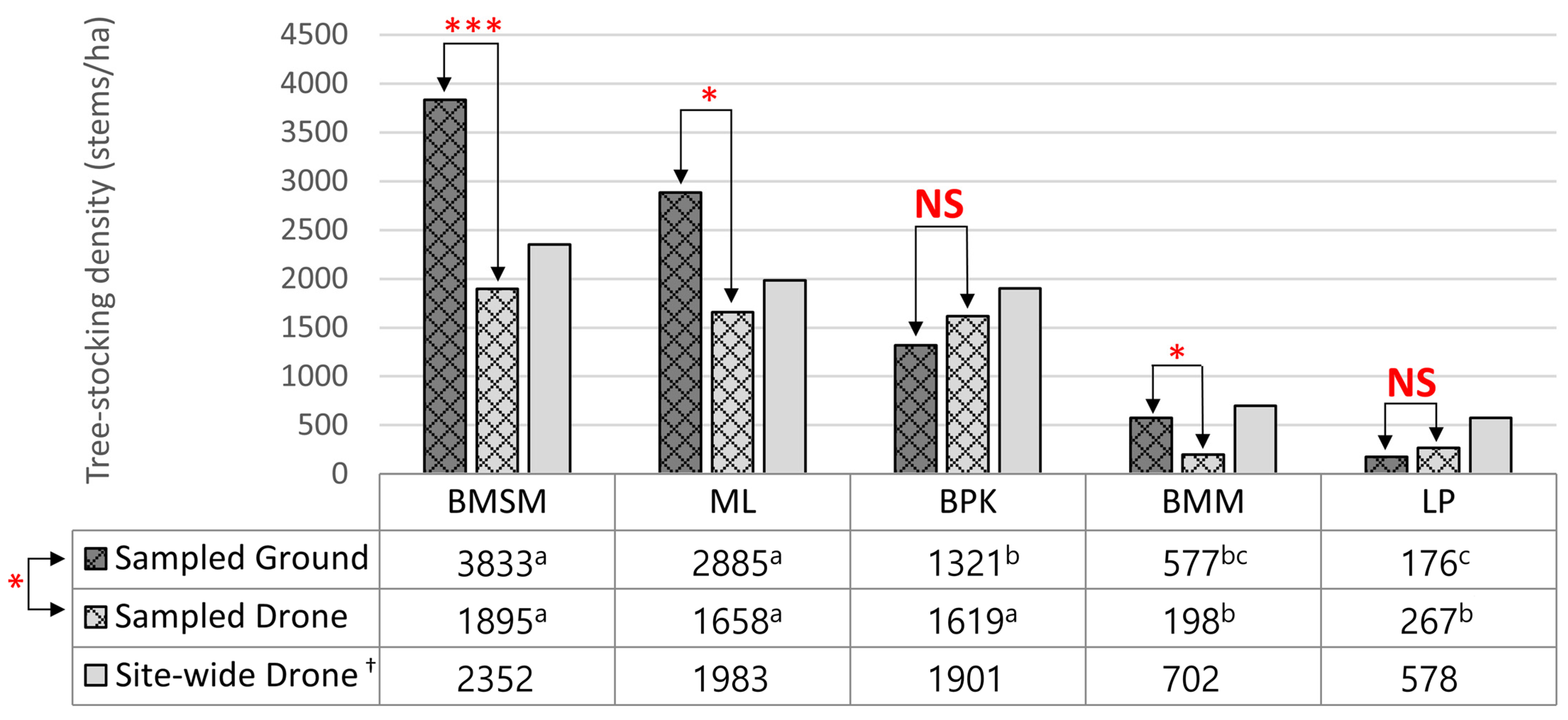
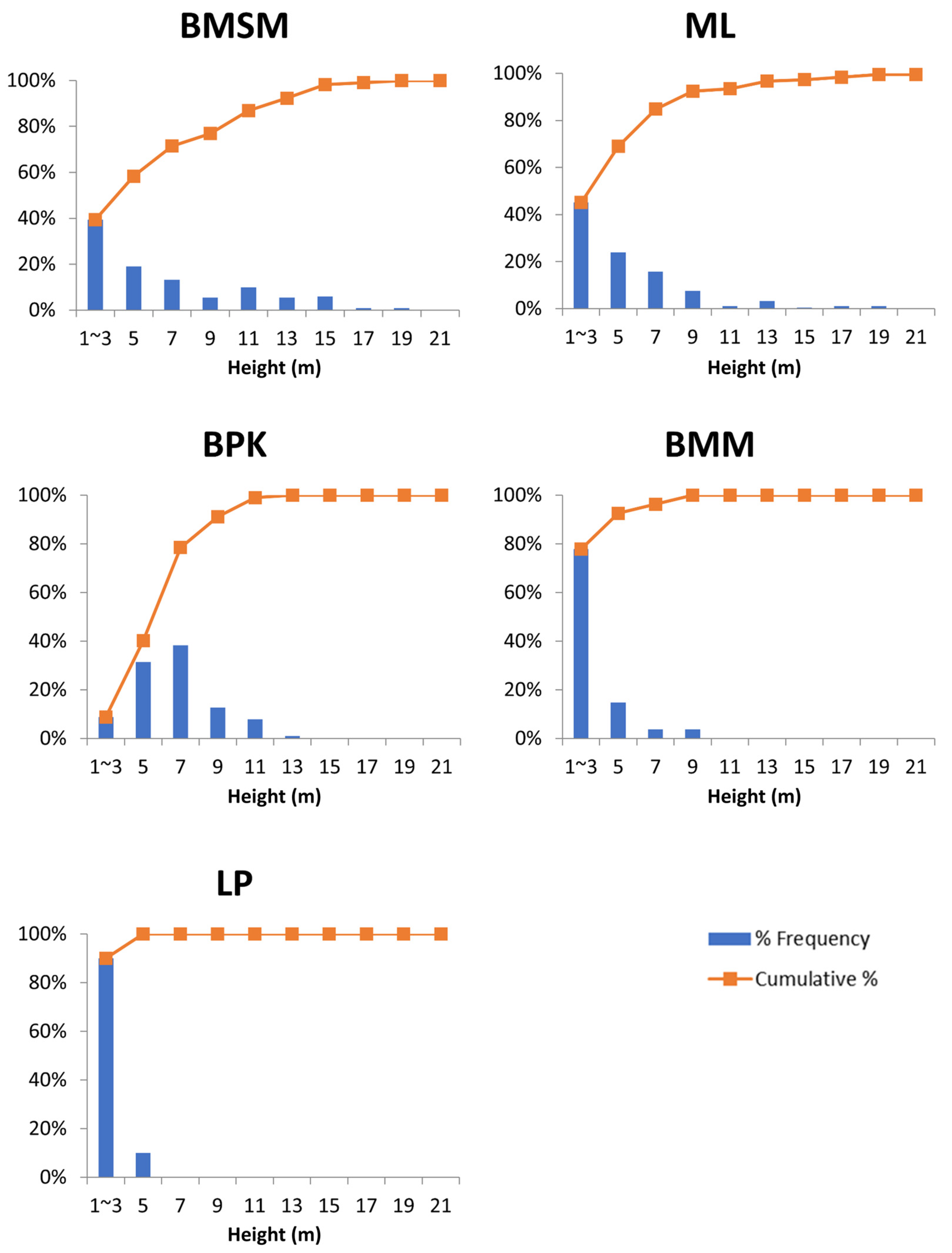
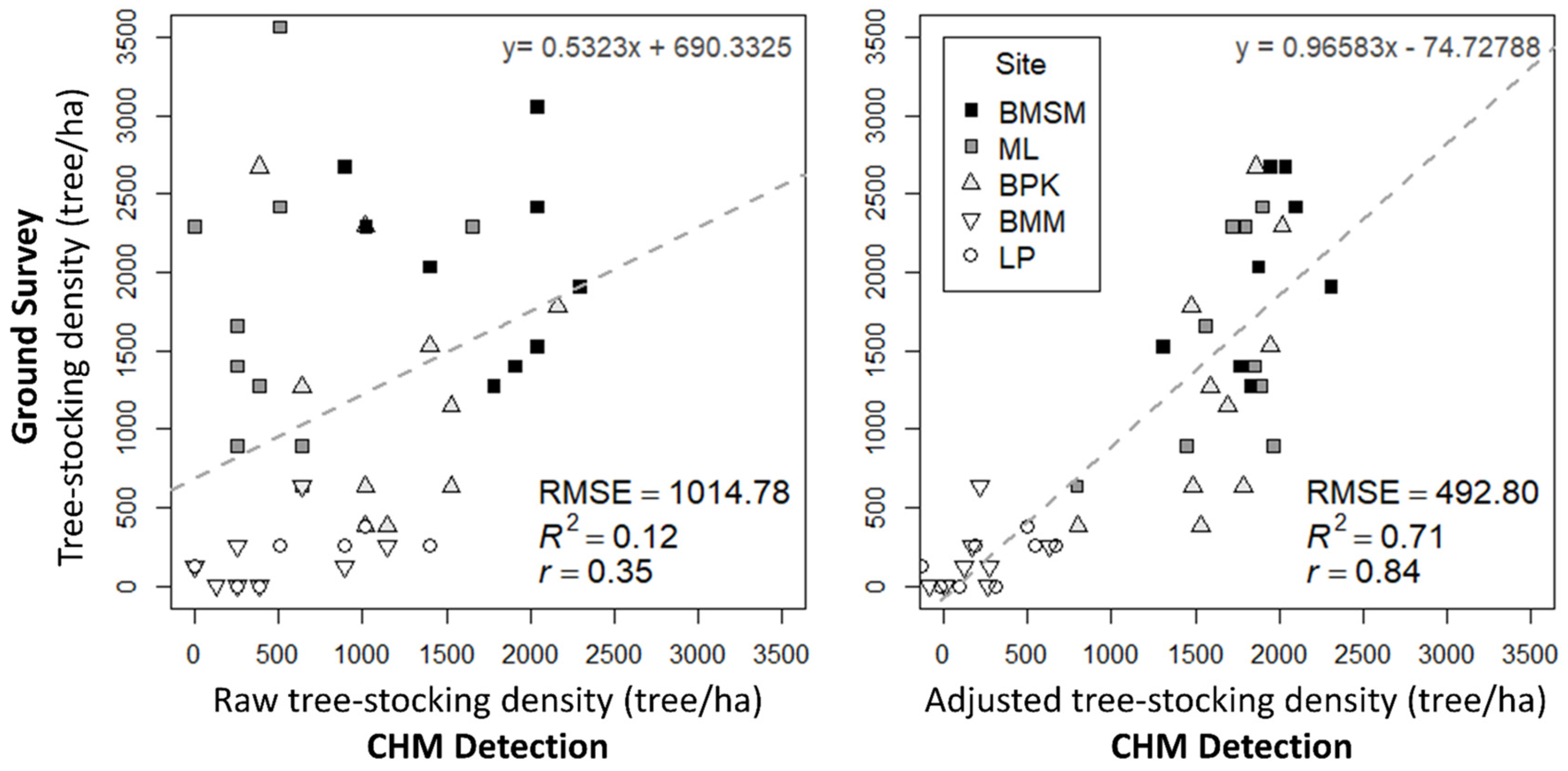
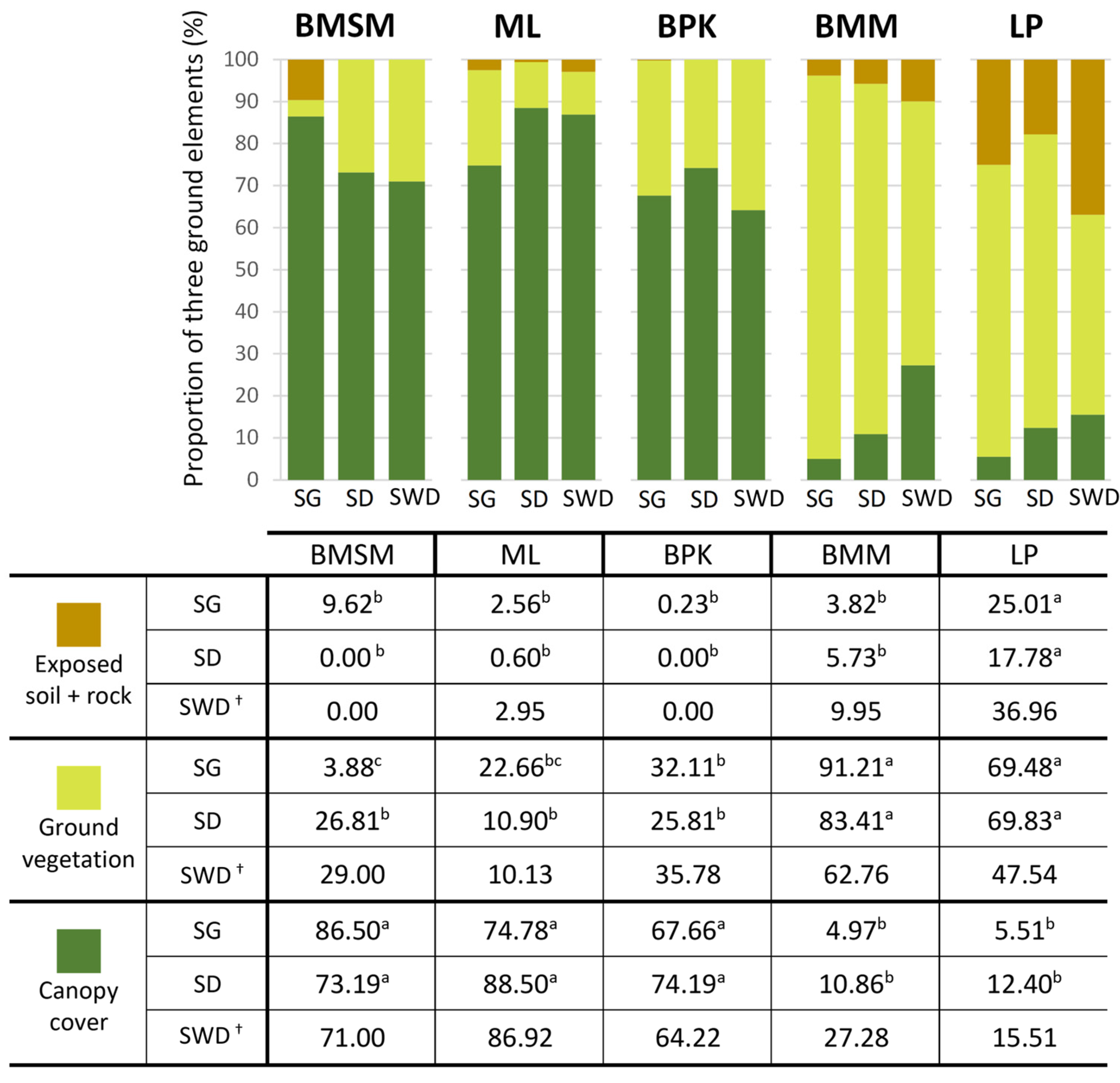
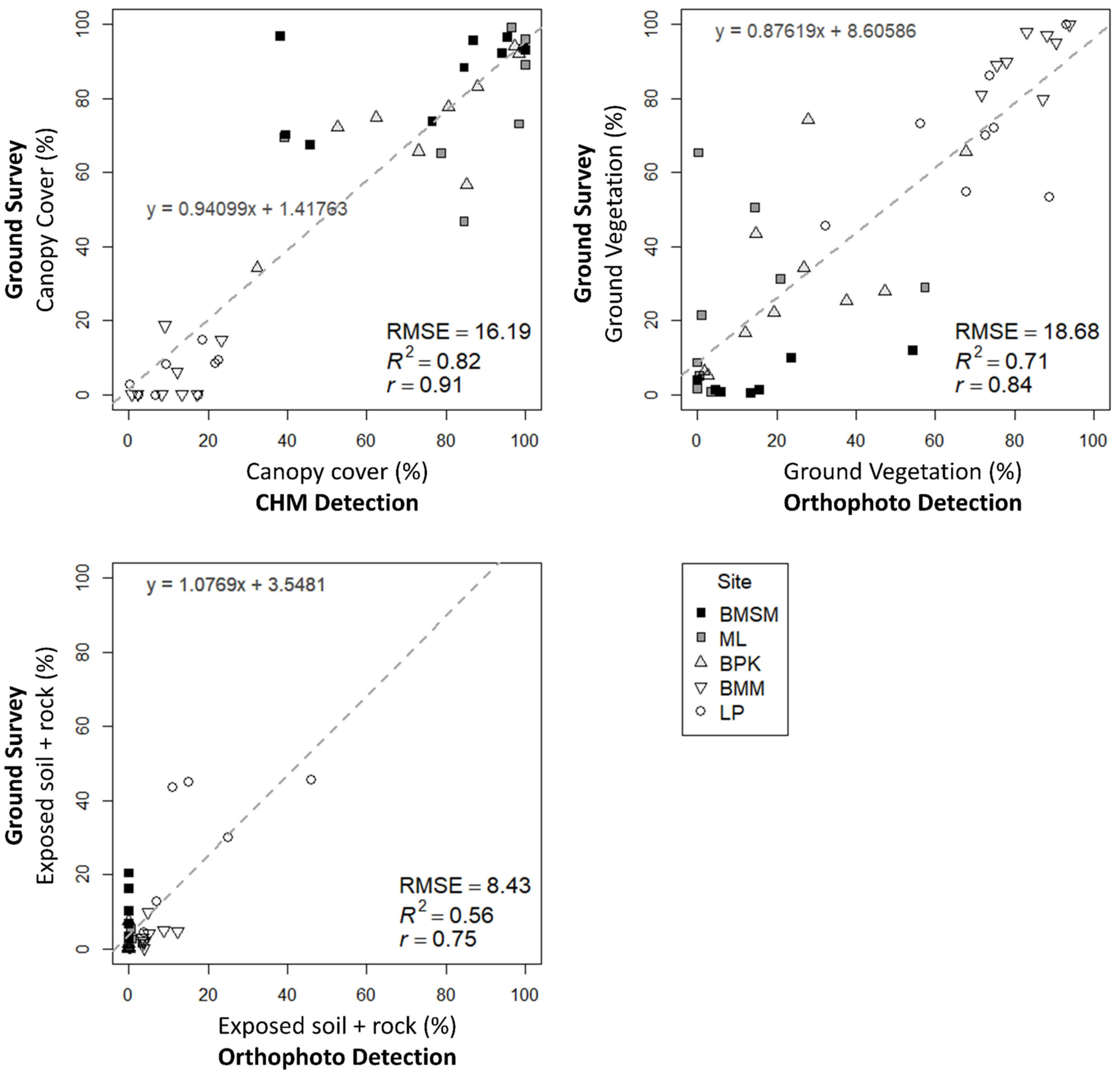
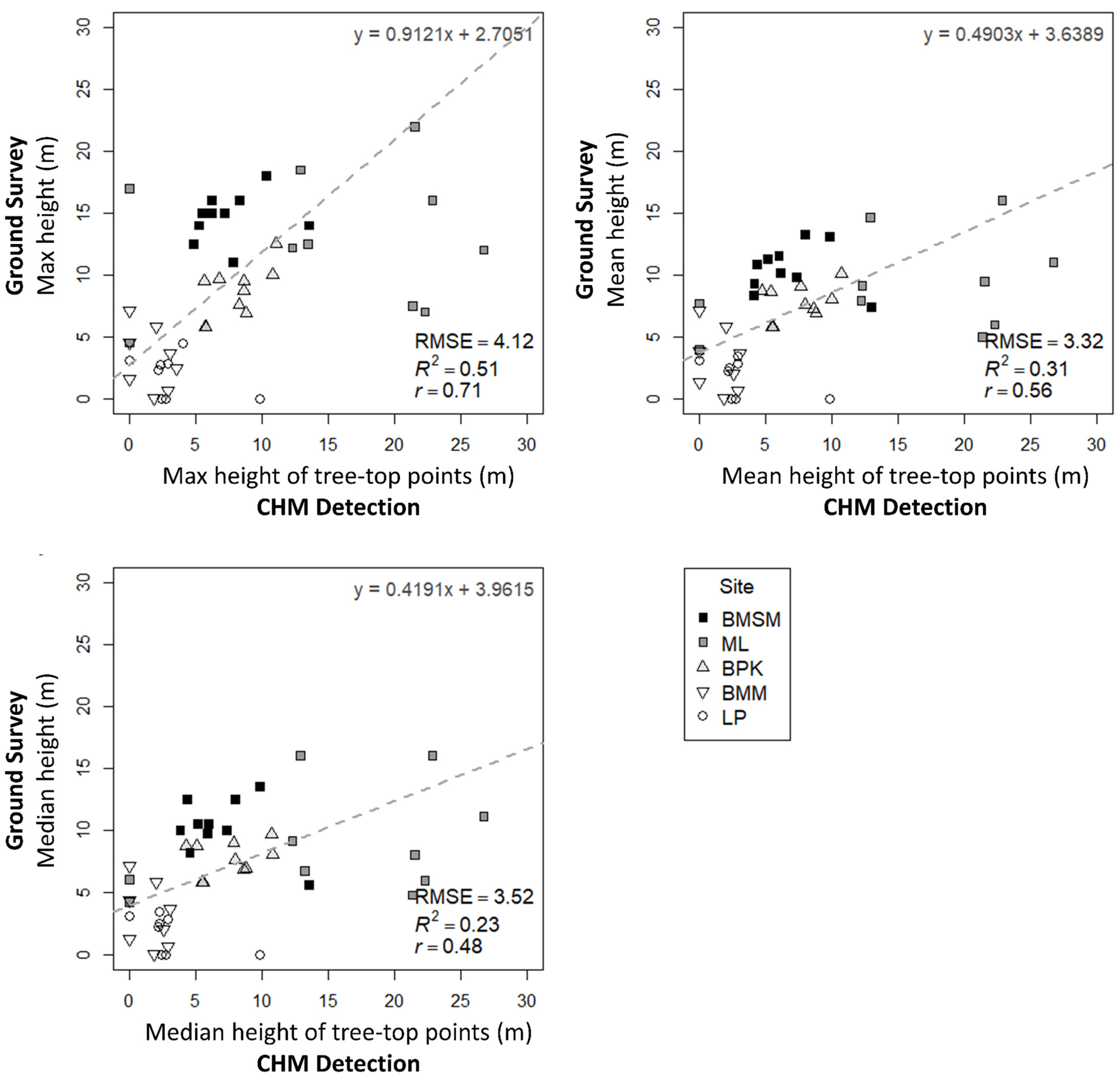
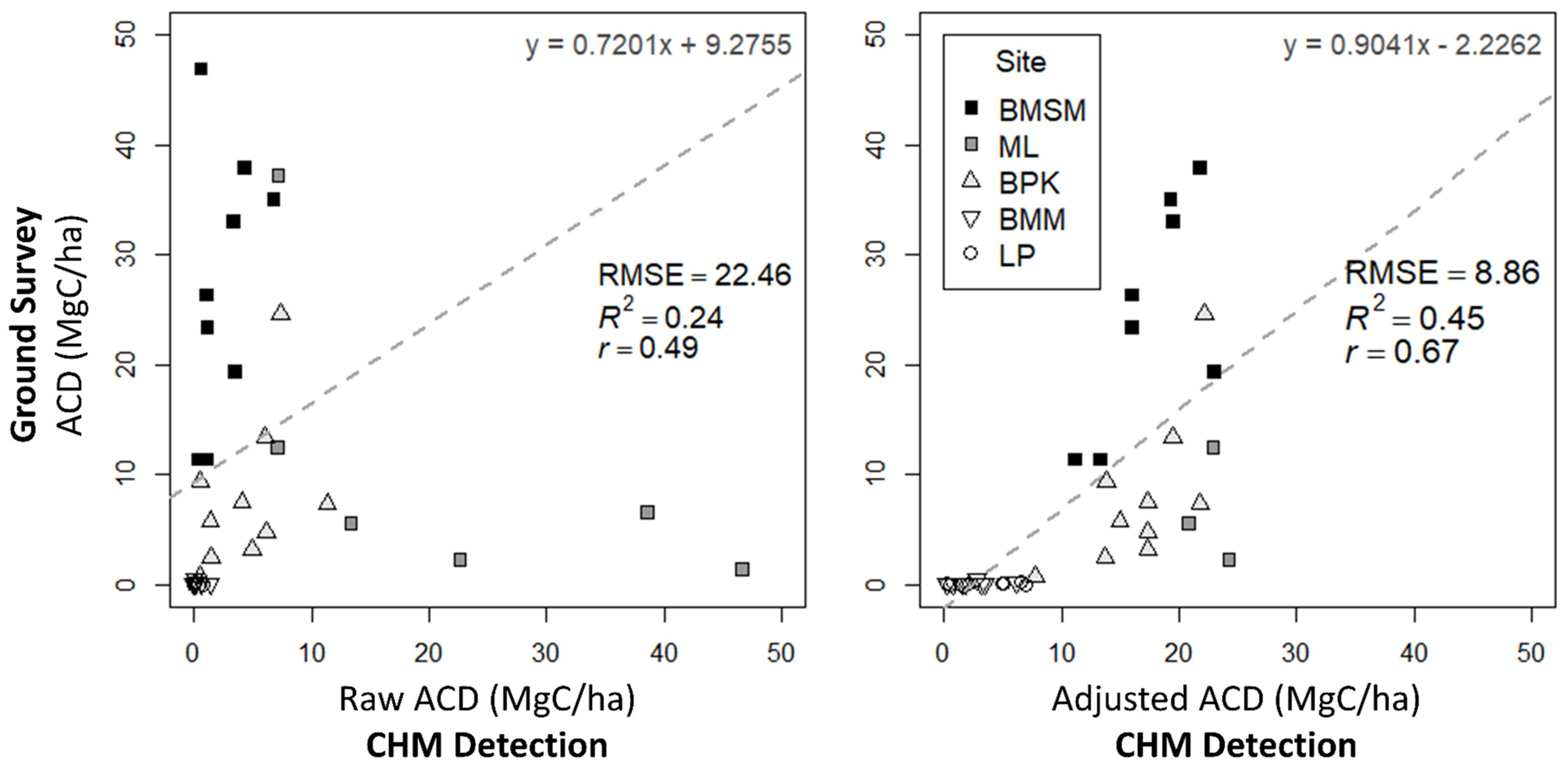
3. Results
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- SCBD: Secretariat of the Convention on Biological Diversity. Review of the Status and Trends of, and Major Threats to, the Forest Biological Diversity (CBD Technical Series No. 7); SCBD: Montreal, QC, Canada, 2002; ISBN 92-807-2173-9. [Google Scholar]
- CBD. Quick Guide to the Aichi Biodiversity Targets 15. Ecosystems Restored and Resilience Enhaced; SCBD: Montreal, QC, Canada, 2010. [Google Scholar]
- UNFCCC. Report of the Conference of the Parties on Its Thirteenth Session, Held in Bali from 3 to 15 December 2007; UNFCCC: Bonn, Germany, 2008. [Google Scholar]
- Aerts, R.; Honnay, O. Forest Restoration, Biodiversity and Ecosystem Functioning. BMC Ecol. 2011, 11, 29. [Google Scholar] [CrossRef] [Green Version]
- Lewis, S.L.; Wheeler, C.E.; Mitchard, E.T.A.; Koch, A. Restoring Natural Forests Is the Best Way to Remove Atmospheric Carbon. Nature 2019, 568, 25–28. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- FAO Regional Office for Asia and the Pacific. Helping Forests Take Cover On Forest Protection, Increasing Forest Cover and Future Approaches to Reforesting Degraded Tropical Landscapes in Asia and the Pacific; Poopathy, V., Appanah, S., Durst, P.B., Eds.; FAO Regional Office for Asia and the Pacific: Bangkok, Thailand, 2005; ISBN 974-7946-74-2. [Google Scholar]
- Zhai, D.L.; Xu, J.C.; Dai, Z.C.; Cannon, C.H.; Grumbine, R.E. Increasing Tree Cover While Losing Diverse Natural Forests in Tropical Hainan, China. Reg. Environ. Chang. 2014, 14, 611–621. [Google Scholar] [CrossRef]
- Höhl, M.; Ahimbisibwe, V.; Stanturf, J.A.; Elsasser, P.; Kleine, M.; Bolte, A. Forest Landscape Restoration-What Generates Failure and Success? Forests 2020, 11, 938. [Google Scholar] [CrossRef]
- Di Sacco, A.; Hardwick, K.A.; Blakesley, D.; Brancalion, P.H.S.; Breman, E.; Cecilio Rebola, L.; Chomba, S.; Dixon, K.; Elliott, S.; Ruyonga, G.; et al. Ten Golden Rules for Reforestation to Optimize Carbon Sequestration, Biodiversity Recovery and Livelihood Benefits. Glob. Chang. Biol. 2021, 27, 1328–1348. [Google Scholar] [CrossRef] [PubMed]
- Sasaki, N.; Asner, G.P.; Knorr, W.; Durst, P.B.; Priyadi, H.R.; Putz, F.E. Approaches to Classifying and Restoring Degraded Tropical Forests for the Anticipated REDD+ Climate Change Mitigation Mechanism. IForest 2011, 4, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Elliott, S.D.; Blakesley, D.; Hardwick, K. Restoring Tropical Forests: A Practical Guide; Royal Botanic Gardens, Kew: Richmond, Surrey, UK, 2013; ISBN 978-1-84246-442-7. [Google Scholar]
- Thompson, I.D.; Guariguata, M.R.; Okabe, K.; Bahamondez, C.; Nasi, R.; Heymell, V.; Sabogal, C. An Operational Framework for Defining and Monitoring Forest Degradatio. Ecol. Soc. 2013, 18, 20. [Google Scholar] [CrossRef]
- Vásquez-Grandón, A.; Donoso, P.J.; Gerding, V. Forest Degradation: When Is a Forest Degraded? Forests 2018, 9, 726. [Google Scholar] [CrossRef] [Green Version]
- Alonzo, M.; Andersen, H.E.; Morton, D.C.; Cook, B.D. Quantifying Boreal Forest Structure and Composition Using UAV Structure from Motion. Forests 2018, 9, 119. [Google Scholar] [CrossRef] [Green Version]
- Camarretta, N.; Harrison, P.A.; Bailey, T.; Potts, B.; Lucieer, A.; Davidson, N.; Hunt, M. Monitoring Forest Structure to Guide Adaptive Management of Forest Restoration: A Review of Remote Sensing Approaches. New For. 2019, 51, 573–596. [Google Scholar] [CrossRef]
- Asner, G.P.; Martin, R.E.; Anderson, C.B.; Knapp, D.E. Quantifying Forest Canopy Traits: Imaging Spectroscopy versus Field Survey. Remote Sens. Environ. 2015, 158, 15–27. [Google Scholar] [CrossRef]
- Paneque-Gálvez, J.; McCall, M.K.; Napoletano, B.M.; Wich, S.A.; Koh, L.P. Small Drones for Community-Based Forest Monitoring: An Assessment of Their Feasibility and Potential in Tropical Areas. Forests 2014, 5, 1481–1507. [Google Scholar] [CrossRef] [Green Version]
- Sankey, T.; Donager, J.; McVay, J.; Sankey, J.B. UAV Lidar and Hyperspectral Fusion for Forest Monitoring in the Southwestern USA. Remote Sens. Environ. 2017, 195, 30–43. [Google Scholar] [CrossRef]
- de Almeida, D.R.A.; Broadbent, E.N.; Ferreira, M.P.; Meli, P.; Zambrano, A.M.A.; Gorgens, E.B.; Resende, A.F.; de Almeida, C.T.; do Amaral, C.H.; Corte, A.P.D.; et al. Monitoring Restored Tropical Forest Diversity and Structure through UAV-Borne Hyperspectral and Lidar Fusion. Remote Sens. Environ. 2021, 264, 112582. [Google Scholar] [CrossRef]
- Asner, G.P.; Mascaro, J.; Muller-Landau, H.C.; Vieilledent, G.; Vaudry, R.; Rasamoelina, M.; Hall, J.S.; van Breugel, M. A Universal Airborne LiDAR Approach for Tropical Forest Carbon Mapping. Oecologia 2012, 168, 1147–1160. [Google Scholar] [CrossRef] [PubMed]
- Wallace, L.; Lucieer, A.; Malenovskỳ, Z.; Turner, D.; Vopěnka, P. Assessment of Forest Structure Using Two UAV Techniques: A Comparison of Airborne Laser Scanning and Structure from Motion (SfM) Point Clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef] [Green Version]
- Ullman, S. The Interpretation of Structure From Motion. R. Soc. Lond. 1979, 203, 405–426. [Google Scholar] [CrossRef] [Green Version]
- Stockman, G.; Shapiro, L.G. Computer Vision; Prentice Hall: Hoboken, NJ, USA, 2001; ISBN 978-0-13-030796-5. [Google Scholar]
- Zahawi, R.A.; Dandois, J.P.; Holl, K.D.; Nadwodny, D.; Reid, J.L.; Ellis, E.C. Using Lightweight Unmanned Aerial Vehicles to Monitor Tropical Forest Recovery. Biol. Conserv. 2015, 186, 287–295. [Google Scholar] [CrossRef] [Green Version]
- Fujimoto, A.; Haga, C.; Matsui, T.; Machimura, T.; Hayashi, K.; Sugita, S.; Takagi, H. An End to End Process Development for UAV-SfM Based Forest Monitoring: Individual Tree Detection, Species Classification and Carbon Dynamics Simulation. Forests 2019, 10, 680. [Google Scholar] [CrossRef] [Green Version]
- Khokthong, W.; Zemp, D.C.; Irawan, B.; Sundawati, L.; Kreft, H.; Hölscher, D. Drone-Based Assessment of Canopy Cover for Analyzing Tree Mortality in an Oil Palm Agroforest. Front. For. Glob. Chang. 2019, 2, 12. [Google Scholar] [CrossRef] [Green Version]
- Swinfield, T.; Lindsell, J.A.; Williams, J.V.; Harrison, R.D.; Agustiono; Habibi; Elva, G.; Schönlieb, C.B.; Coomes, D.A. Accurate Measurement of Tropical Forest Canopy Heights and Aboveground Carbon Using Structure From Motion. Remote Sens. 2019, 11, 928. [Google Scholar] [CrossRef] [Green Version]
- Zhou, X.; Zhang, X. Individual Tree Parameters Estimation for Plantation Forests Based on UAV Oblique Photography. IEEE Access 2020, 8, 96184–96198. [Google Scholar] [CrossRef]
- Glomvinya, S.; Tantasirin, C.; Tongdeenok, P.; Tanaka, N. Changes in Rainfall Characteristics at Huai Kog-Ma Watershed, Chiang Mai Province. Thai J. For. 2016, 35, 66–77. [Google Scholar]
- Maxwell, J.F.; Elliott, S. Vegetation and Vascular Flora of Doi Sutep-Pui National Park, Chiang Mai Province, Thailand; Biodiversity Research and Training Program: Bangkok, Thailand, 2001; ISBN 947-7360-61-6. [Google Scholar]
- Benton, A.R.T.; Taetz, P.J. Elements of Plane Surveying; McGraw-Hill Inter: London, UK, 1991; ISBN 978-0070048843. [Google Scholar]
- Brinker, R.C.; Wolf, P.R. Elementary Surveying, 7th ed.; Harper & Row: New York, NY, USA, 1984; ISBN 978-0060409821. [Google Scholar]
- Brach, M.; Chan, J.C.W.; Szymański, P. Accuracy Assessment of Different Photogrammetric Software for Processing Data from Low-Cost UAV Platforms in Forest Conditions. IForest 2019, 12, 435–441. [Google Scholar] [CrossRef] [Green Version]
- Plowright, A.; Roussel, J.-R. ForestTools: Analyzing Remotely Sensed Forest Data; R Package Version 0.2.1; 2020. [Google Scholar]
- Moeur, M. Predicting Canopy Cover and Shrub Cover with the Prognosis-COVER Model. In Wildlife: Modeling Habitat Relationships of Terrestrial Vertebrates; Verner, J., Morrison, M., Ralph, L., John, C., Eds.; The University of Wisconsin Press: Madison, WI, USA, 1986; p. 470. [Google Scholar]
- Crookston, N.L.; Stage, A.R. Percent Canopy Cover and Stand Structure Statistics from the Forest Vegetation Simulator; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Ogden, UT, USA, 1999.
- McIntosh, A.C.S.; Gray, A.N.; Garman, S.L. Estimating Canopy Cover from Standard Forest Inventory Measurements in Western Oregon. For. Sci. 2012, 58, 154–167. [Google Scholar] [CrossRef] [Green Version]
- Adesoye, P.; Akinwunmi, A.A. Tree Slenderness Coefficient and Percent Canopy Cover in Oban Group Forest, Nigeria Tree Slenderness Coefficient and Percent Canopy Cover in Oban. J. Nat. Sci. Res. 2016, 6, 9–17. [Google Scholar]
- Jucker, T.; Asner, G.P.; Dalponte, M.; Brodrick, P.G.; Philipson, C.D.; Vaughn, N.R.; Arn Teh, Y.; Brelsford, C.; Burslem, D.F.R.P.; Deere, N.J.; et al. Estimating Aboveground Carbon Density and Its Uncertainty in Borneo’s Structurally Complex Tropical Forests Using Airborne Laser Scanning. Biogeosciences 2018, 15, 3811–3830. [Google Scholar] [CrossRef]
- Pothong, T.; Elliott, S.; Chairuangsri, S.; Chanthorn, W.; Shannon, D.P.; Wangpakapattanawong, P. New Allometric Equations for Quantifying Tree Biomass and Carbon Sequestration in Seasonally Dry Secondary Forest in Northern Thailand. New For. 2021, 53, 17–36. [Google Scholar] [CrossRef]
- Coveney, S.; Roberts, K. Lightweight UAV Digital Elevation Models and Orthoimagery for Environmental Applications: Data Accuracy Evaluation and Potential for River Flood Risk Modelling. Int. J. Remote Sens. 2017, 38, 3159–3180. [Google Scholar] [CrossRef] [Green Version]
- DroneDeploy When To Use Ground Control Points: How To Decide If Your Drone Mapping Project Needs GCPs. Available online: https://medium.com/aerial-acuity/when-to-use-ground-control-points-2d404d9f5b15 (accessed on 5 February 2023).
- Sanz-Ablanedo, E.; Chandler, J.H.; Rodríguez-Pérez, J.R.; Ordóñez, C. Accuracy of Unmanned Aerial Vehicle (UAV) and SfM Photogrammetry Survey as a Function of the Number and Location of Ground Control Points Used. Remote Sens. 2018, 10, 1606. [Google Scholar] [CrossRef] [Green Version]
- Fisher, A. Cloud and Cloud-Shadow Detection in SPOT5 HRG Imagery with Automated Morphological Feature Extraction. Remote Sens. 2014, 6, 776–800. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site | Restoration Initiated | Site History | Longitude | Latitude | Altitude (m a.s.l.) | Area, No. Circular Sample Plots |
|---|---|---|---|---|---|---|
| Ban Mae Sa Mai | 2012 | Upland evergreen forest, cleared for agriculture, abandoned in the 1990′s, invaded by herbaceous weeds, and subsequently burnt multiple times; planted with framework tree species in 2007; burnt in 2010 and replanted in 2012 | 98°50′57″ | 18°51′22″ | 1247 m | 1.07 ha 10 plots |
| Mon Long | 2014 | Upland evergreen forest, impacted by fire; enrichment planting with framework tree species amongst scattered remnant mature trees in 2014 | 98°50′28″ | 18°55′20″ | 1290 m | 1.03 ha 10 plots |
| Ban Pong Krai | 2016 | Upland evergreen forest cleared for agriculture undergoing natural regeneration; planted with framework tree species in 2016 | 98°48′19″ | 18°55′52″ | 1408 m | 2.69 ha 10 plots |
| Ban Meh Meh | 2020 | Mixed evergreen-deciduous forest cleared for agriculture and used for domestic elephant browsing; some natural regeneration from surrounding remnant forest, complemented with planting framework tree species in 2020 | 98°52′53″ | 18°54′13″ | 601 m | 0.41 ha 8 plots |
| Lampang | 2019 | Limestone quarry floor; vegetation and top soil removed; benches (terraces) planted with native forest tree seedlings 1 year previously | 99°35′23″ | 18°33′12″ | 419 m | 0.66 ha 8 plots |
| Cost Type | Ground Survey | Drone Survey | |
|---|---|---|---|
| Setup | Training |
|
|
| Equipment |
|
| |
| Data acquisition (Field) | Time |
|
|
| Labour (Salary, food) |
|
| |
| Weather limitations |
|
| |
| Data processing (Lab) | Technique |
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, K.; Elliott, S.; Tiansawat, P. Use of Drone RGB Imagery to Quantify Indicator Variables of Tropical-Forest-Ecosystem Degradation and Restoration. Forests 2023, 14, 586. https://doi.org/10.3390/f14030586
Lee K, Elliott S, Tiansawat P. Use of Drone RGB Imagery to Quantify Indicator Variables of Tropical-Forest-Ecosystem Degradation and Restoration. Forests. 2023; 14(3):586. https://doi.org/10.3390/f14030586
Chicago/Turabian StyleLee, Kyuho, Stephen Elliott, and Pimonrat Tiansawat. 2023. "Use of Drone RGB Imagery to Quantify Indicator Variables of Tropical-Forest-Ecosystem Degradation and Restoration" Forests 14, no. 3: 586. https://doi.org/10.3390/f14030586
APA StyleLee, K., Elliott, S., & Tiansawat, P. (2023). Use of Drone RGB Imagery to Quantify Indicator Variables of Tropical-Forest-Ecosystem Degradation and Restoration. Forests, 14(3), 586. https://doi.org/10.3390/f14030586