
Differentiation of Alternate Harvesting Practices Using Annual Time Series of Landsat Data

 ,
,  , ,
, ,  ,
,
Abstract
:1. Introduction
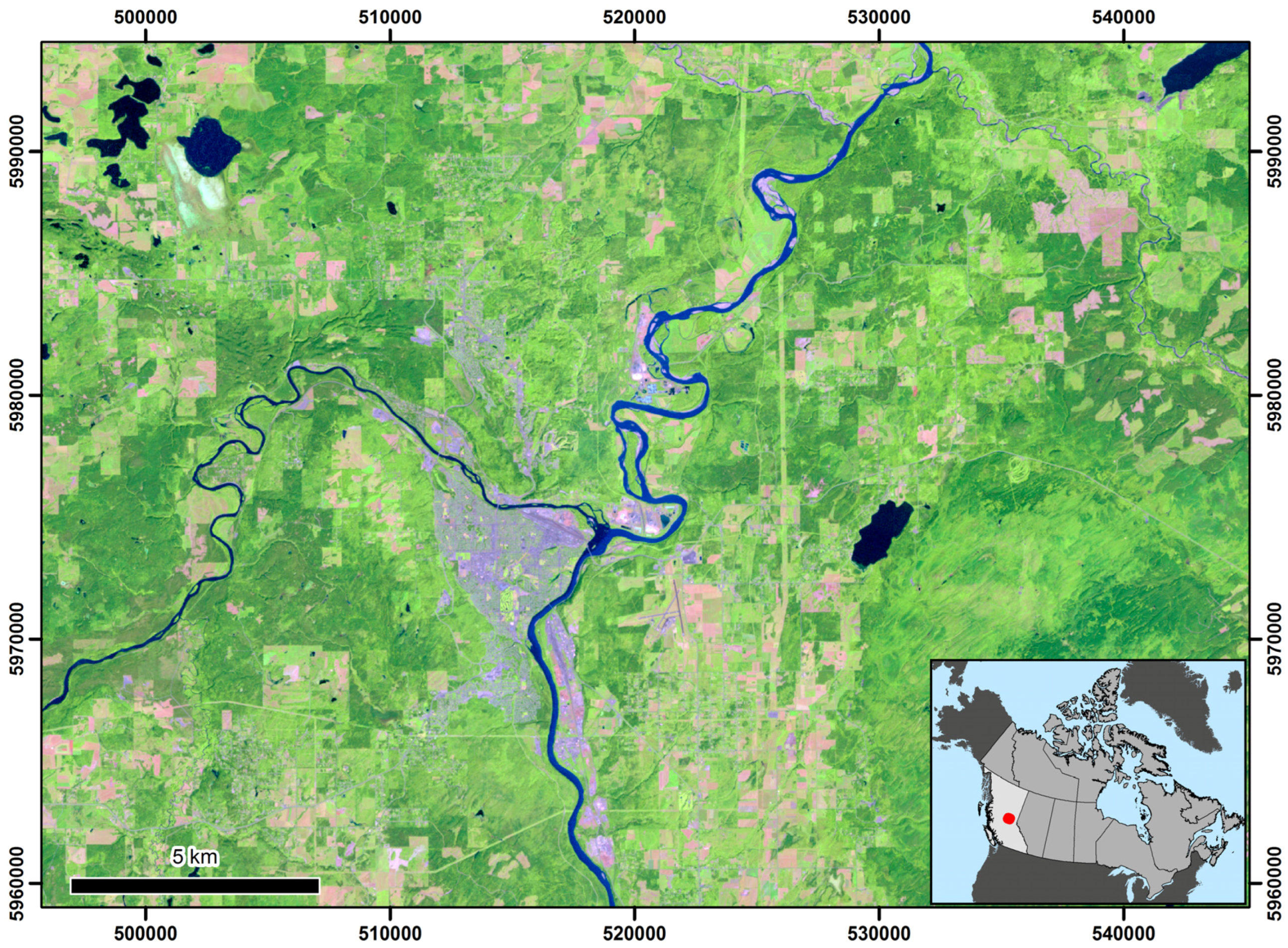
2. Study Area
3. Data
3.1. Landsat Time-Series Data
3.2. Validation Data
4. Methods
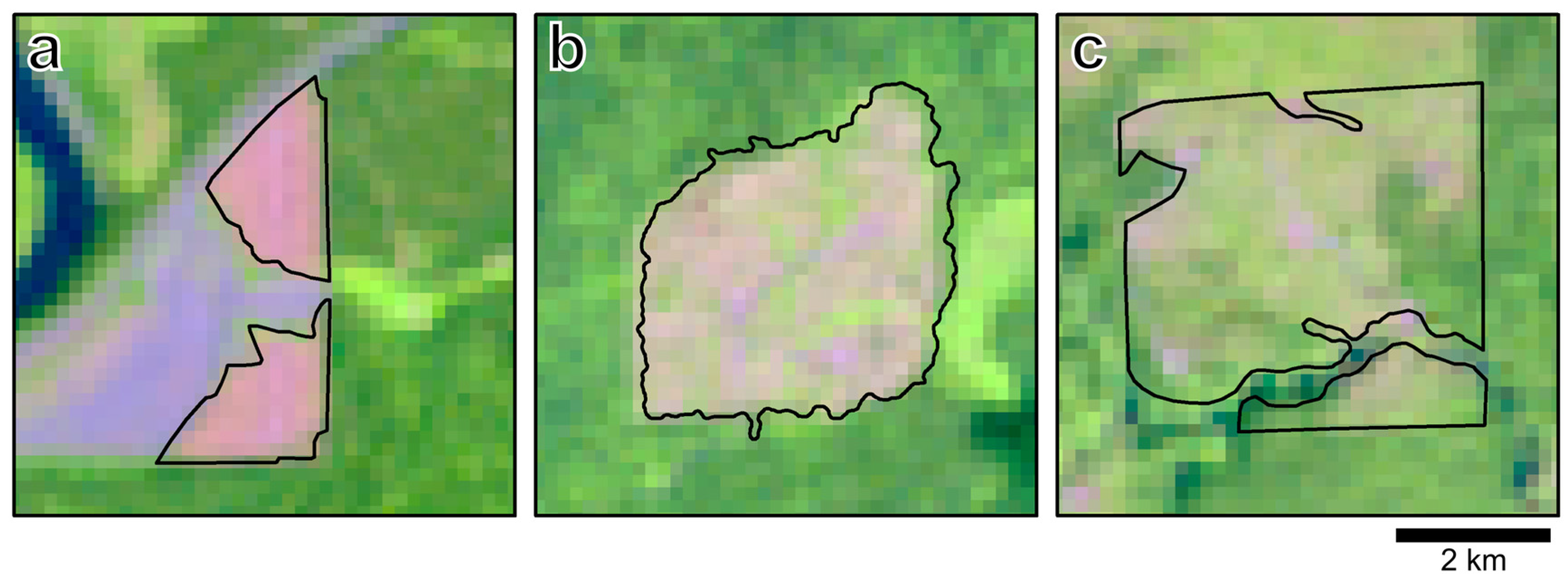
4.1. Spectral Characterization of Harvesting Practices
4.2. Change Attribution
5. Results
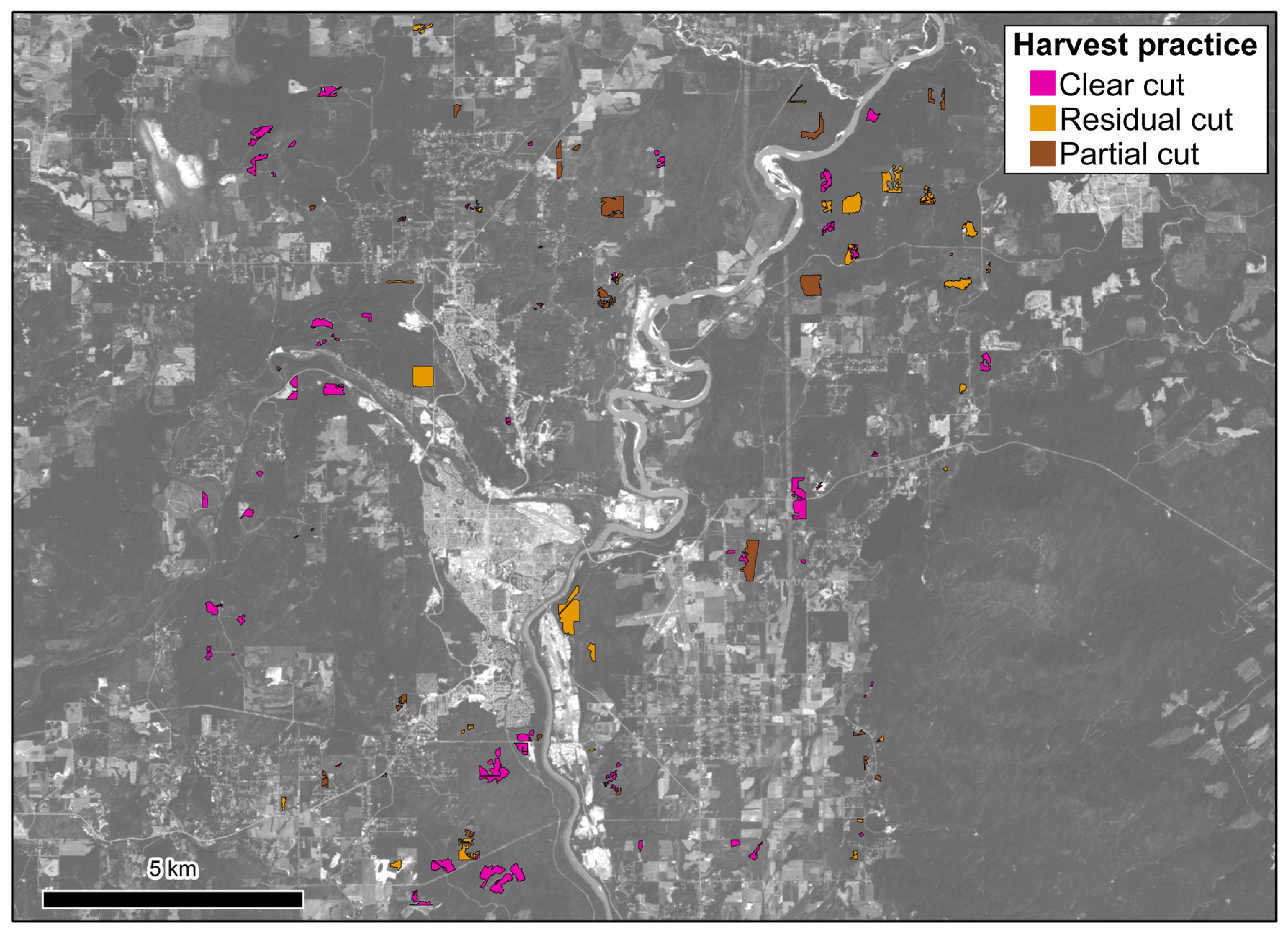
5.1. Discriminating Harvest Type
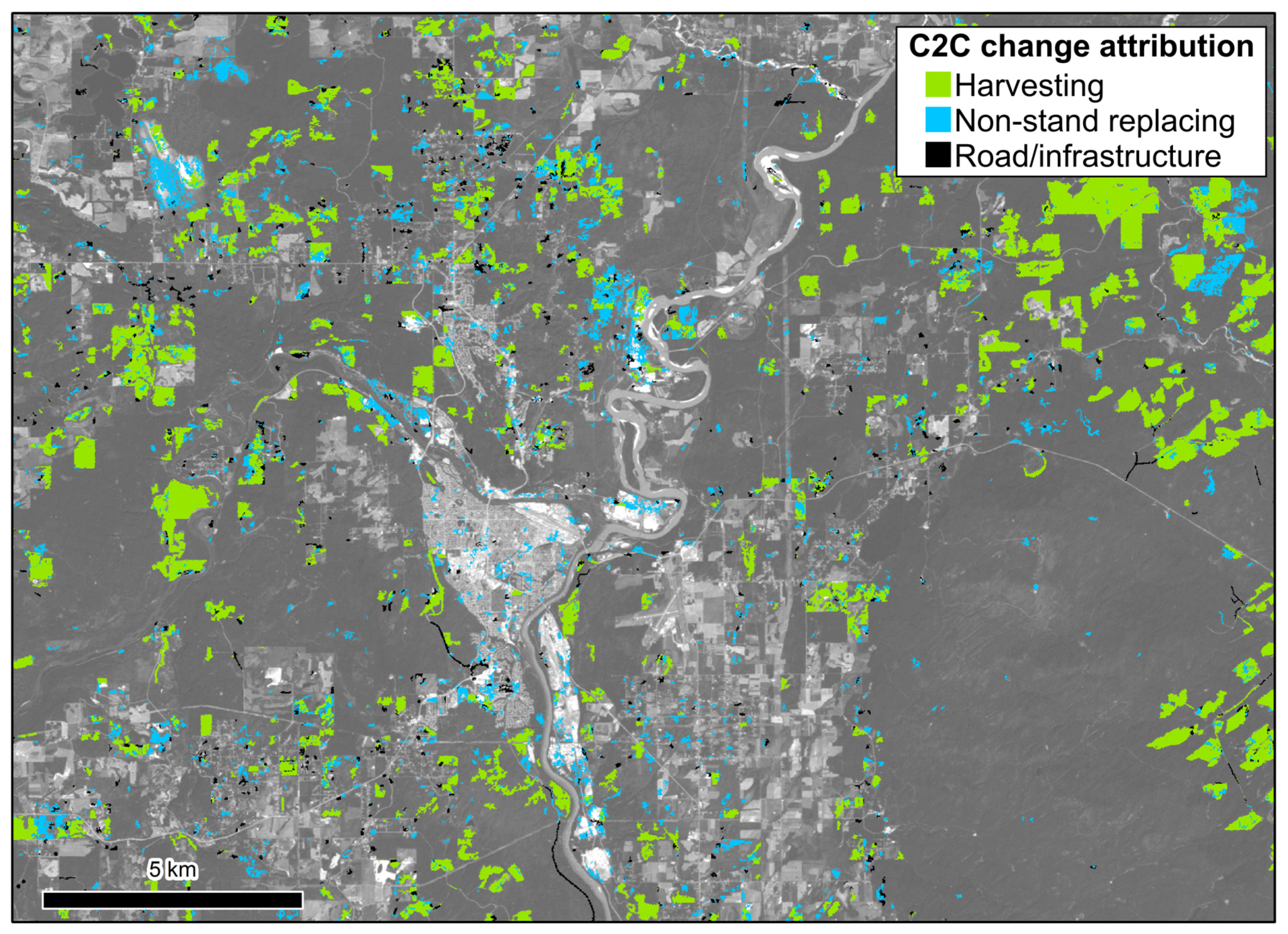
5.2. Change Attribution
6. Discussion
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wulder, M.A.; White, J.C.; Cranny, M.; Hall, R.J.; Luther, J.E.; Beaudoin, A.; Goodenough, D.G.; Dechka, J.A. Monitoring Canada’s forests. Part 1: Completion of the EOSD land cover project. Can. J. Remote Sens. 2008, 34, 549–562. [Google Scholar] [CrossRef]
- Natural Resources Canada. The State of Canada’s Forests; Annual Report 2016; Natural Resources Canada: Ottawa, ON, Canada, 2016.
- Wulder, M.A.; Kurz, W.A.; Gillis, M.; Wulder, M. National level forest monitoring and modeling in Canada. Prog. Plan. 2004, 61, 365–381. [Google Scholar] [CrossRef]
- Brandt, J.P.; Flannigan, M.D.; Maynard, D.G.; Thompson, I.D.; Volney, W.J.A. An introduction to Canada’s boreal zone: Ecosystem processes, health, sustainability, and environmental issues. Environ. Rev. 2013, 21, 207–226. [Google Scholar] [CrossRef]
- Kangas, A.; Maltamo, M. Forest Inventory: Methodology and Applications; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Wulder, M.A.; Campbell, C.; White, J.C.; Flannigan, M.; Campbell, I.D. National circumstances in the international circumboreal community. For. Chron. 2007, 83, 539–556. [Google Scholar] [CrossRef]
- Masek, J.G.; Cohen, W.B.; Leckie, D.; Wulder, M.A.; Vargas, R.; de Jong, B.; Healey, S.; Law, B.; Birdsey, R.; Houghton, R.A.; et al. Recent rates of forest harvest and conversion in North America. J. Geophys. Res. 2011. [Google Scholar] [CrossRef]
- Gillis, M.D.; Leckie, D.G. Forest inventory update in Canada. For. Chron. 1996, 72, 138–156. [Google Scholar] [CrossRef]
- White, J.C.; Coops, N.C.; Wulder, M.A.; Vastaranta, M.; Hilker, T.; Tompalski, P. Remote sensing technologies for enhancing forest inventories: A review. Can. J. Remote Sens. 2016, 42, 619–641. [Google Scholar] [CrossRef]
- Wulder, M.A.; Coops, N.C.; Hudak, A.T.; Morsdorf, F.; Nelson, R.; Newnham, G.; Vastaranta, M. Status and prospects for LiDAR remote sensing of forested ecosystems. Can. J. Remote Sens. 2013, 39, S1–S5. [Google Scholar] [CrossRef]
- Hermosilla, T.; Wulder, M.A.; White, J.C.; Coops, N.C.; Hobart, G.W. Regional detection, characterization, and attribution of annual forest change from 1984 to 2012 using Landsat-derived time-series metrics. Remote Sens. Environ. 2015, 170, 121–132. [Google Scholar] [CrossRef]
- White, J.C.; Wulder, M.A. The Landsat observation record of Canada: 1972–2012. Can. J. Remote Sens. 2013, 39, 455–467. [Google Scholar] [CrossRef]
- White, J.C.; Wulder, M.A.; Hobart, G.W.; Luther, J.E.; Hermosilla, T.; Griffiths, P.; Coops, N.C.; Hall, R.J.; Hostert, P.; Dyk, A.; et al. Pixel-based image compositing for large-area dense time series applications and science. Can. J. Remote Sens. 2014, 40, 192–212. [Google Scholar] [CrossRef]
- Woodcock, C.E.; Allen, R.; Anderson, M.; Belward, A.; Bindschadler, R.; Cohen, W.; Gao, F.; Goward, S.N.; Helder, D.; Helmer, E.; et al. Free access to Landsat imagery. Science 2008, 320, 1011. [Google Scholar] [CrossRef] [PubMed]
- Sexton, J.O.; Song, X.-P.; Feng, M.; Noojipady, P.; Anand, A.; Huang, C.; Kim, D.-H.; Collins, K.M.; Channan, S.; DiMiceli, C.; et al. Global, 30-m resolution continuous fields of tree cover: Landsat-based rescaling of MODIS vegetation continuous fields with lidar-based estimates of error. Int. J. Digit. Earth 2013, 6, 427–448. [Google Scholar] [CrossRef]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-resolution global maps of 21st-century forest cover change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [PubMed]
- Ju, J.; Masek, J.G. The vegetation greenness trend in Canada and US Alaska from 1984–2012 Landsat data. Remote Sens. Environ. 2016, 176, 1–16. [Google Scholar] [CrossRef]
- Hermosilla, T.; Wulder, M.A.; White, J.C.; Coops, N.C.; Hobart, G.W.; Campbell, L.B. Mass data processing of time series Landsat imagery: Pixels to data products for forest monitoring. Int. J. Digit. Earth 2016, 9, 1035–1054. [Google Scholar] [CrossRef]
- Townshend, J.R.G.; Justice, C.O. Selecting the spatial resolution of satellite sensors required for global monitoring of land transformations. Int. J. Remote Sens. 1988, 9, 187–236. [Google Scholar] [CrossRef]
- Wulder, M.A.; Masek, J.G.; Cohen, W.B.; Loveland, T.R.; Woodcock, C.E. Opening the archive: How free data has enabled the science and monitoring promise of Landsat. Remote Sens. Environ. 2012, 122, 2–10. [Google Scholar] [CrossRef]
- Belward, A.S.; Skøien, J.O. Who launched what, when and why; trends in global land-cover observation capacity from civilian earth observation satellites. ISPRS J. Photogramm. Remote Sens. 2015, 103, 115–128. [Google Scholar] [CrossRef]
- British Columbia Ministry of Forests and Range Silviculture Program Statistics. Available online: https://www.for.gov.bc.ca/hfp/silviculture/statistics/statistics.htm (accessed on 15 December 2016).
- British Columbia Ministry of Forests, Mines and Lands. The State of British Columbia’s Forests, 3rd ed.Forest Practices and Investment Branch: Victoria, BC, Canada, 2010.
- Healey, S.P.; Yang, Z.; Cohen, W.B.; Pierce, D.J. Application of two regression-based methods to estimate the effects of partial harvest on forest structure using Landsat data. Remote Sens. Environ. 2006, 101, 115–126. [Google Scholar] [CrossRef]
- Kennedy, R.E.; Cohen, W.B.; Schroeder, T.A. Trajectory-based change detection for automated characterization of forest disturbance dynamics. Remote Sens. Environ. 2007, 110, 370–386. [Google Scholar] [CrossRef]
- Schroeder, T.A.; Wulder, M.A.; Healey, S.P.; Moisen, G.G. Mapping wildfire and clearcut harvest disturbances in boreal forests with Landsat time series data. Remote Sens. Environ. 2011, 115, 1421–1433. [Google Scholar] [CrossRef]
- British Columbia Ministry of Forests. The Ecology of the Sub-Boreal Spruce Zone; British Columbia Ministry of Forests: Victoria, BC, Canada, 1998.
- Meyers Norris Penny. British Columbia Forest Industry Economic Impact Study; Meyers Norris Penny: Calgary, AB, Canada, 2015. [Google Scholar]
- Forest Practices Board. High Retention Harvesting and Timber Sustainability on the British Columbia Coast; Forest Practices Board: Victoria, BC, Canada, 2009.
- Dhar, A.; Parrott, L.; Heckbert, S. Consequences of mountain pine beetle outbreak on forest ecosystem services in western Canada. Can. J. For. Res. 2016, 46, 987–999. [Google Scholar] [CrossRef]
- Hermosilla, T.; Wulder, M.A.; White, J.C.; Coops, N.C.; Hobart, G.W. An integrated Landsat time series protocol for change detection and generation of annual gap-free surface reflectance composites. Remote Sens. Environ. 2015, 158, 220–234. [Google Scholar] [CrossRef]
- Leckie, D.; Tinis, S.; Henley, M.; Eichel, F.; Walsworth, N.; Hardman, D.; Burt, W.; Dechka, J.; Paradine, D.; Landry, R.; et al. Deforestation and Forest Harvest Mapping with Integrated Automated and Manual Methods: Pilot Study Prince George, British Columbia, Canada; Information Report Bc-X-438; Canadian Forest Service Pacific Forestry Centre: Victoria, BC, Canada, 2016.
- Key, C.H.; Benson, N.C. Landscape Assessment (LA) Sampling and Analysis Methods; USDA Forest Service Fort: Collins, CO, USA, 2006.
- Crist, E.P. A TM Tasseled Cap equivalent transformation for reflectance factor data. Remote Sens. Environ. 1985, 17, 301–306. [Google Scholar] [CrossRef]
- Ahmed, O.S.; Franklin, S.E.; Wulder, M.A. Integration of lidar and Landsat data to estimate forest canopy cover in Coastal British Columbia. Photogramm. Eng. Remote Sens. 2014, 80, 953–961. [Google Scholar] [CrossRef]
- Olofsson, P.; Foody, G.M.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M.A. Good practices for estimating area and assessing accuracy of land change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef]
- Lambert, J.; Denux, J.-P.; Verbesselt, J.; Balent, G.; Cheret, V. Detecting clear-cuts and decreases in forest vitality using MODIS NDVI time series. Remote Sens. 2015, 7, 3588–3612. [Google Scholar] [CrossRef]
- Pickell, P.D.; Hermosilla, T.; Frazier, R.J.; Coops, N.C.; Wulder, M.A. Forest recovery trends derived from Landsat time series for North American boreal forests. Int. J. Remote Sens. 2016, 37, 138–149. [Google Scholar] [CrossRef]
- Walter, V. Object-based classification of remote sensing data for change detection. ISPRS J. Photogramm. Remote Sens. 2004, 58, 225–238. [Google Scholar] [CrossRef]
- Thorpe, H.C.; Thomas, S.C. Partial harvesting in the Canadian boreal: Success will depend on stand dynamic responses. For. Chron. 2007, 83, 319–325. [Google Scholar] [CrossRef]
- Ahmed, O.S.; Wulder, M.A.; White, J.C.; Hermosilla, T.; Coops, N.C.; Franklin, S.E. Classification of annual non-stand replacing boreal forest change in Canada using Landsat time series: A case study in northern Ontario. Remote Sens. Lett. 2017, 8, 29–37. [Google Scholar] [CrossRef]
- Lieffers, V.J.; Beck, J.A. A semi-natural approach to mixedwood management in the prairie provinces. For. Chron. 1994, 70, 260–264. [Google Scholar] [CrossRef]
- Bergeron, Y.; Harvey, B. Basing silviculture on natural ecosystem dynamics: An approach applied to the southern boreal mixedwood forest of Quebec. For. Ecol. Manag. 1997, 92, 235–242. [Google Scholar] [CrossRef]
- Burton, P.J.; Kneeshaw, D.D.; Coates, K.D. Managing forest harvesting to maintain old growth in boreal and sub-boreal forests. For. Chron. 1999, 75, 623–631. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Loveland, T.R.; Woodcock, C.E.; Belward, A.S.; Cohen, W.B.; Fosnight, E.A.; Shaw, J.; Masek, J.G.; Roy, D.P. The global Landsat archive: Status, consolidation, and direction. Remote Sens. Environ. 2016, 185, 271–283. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
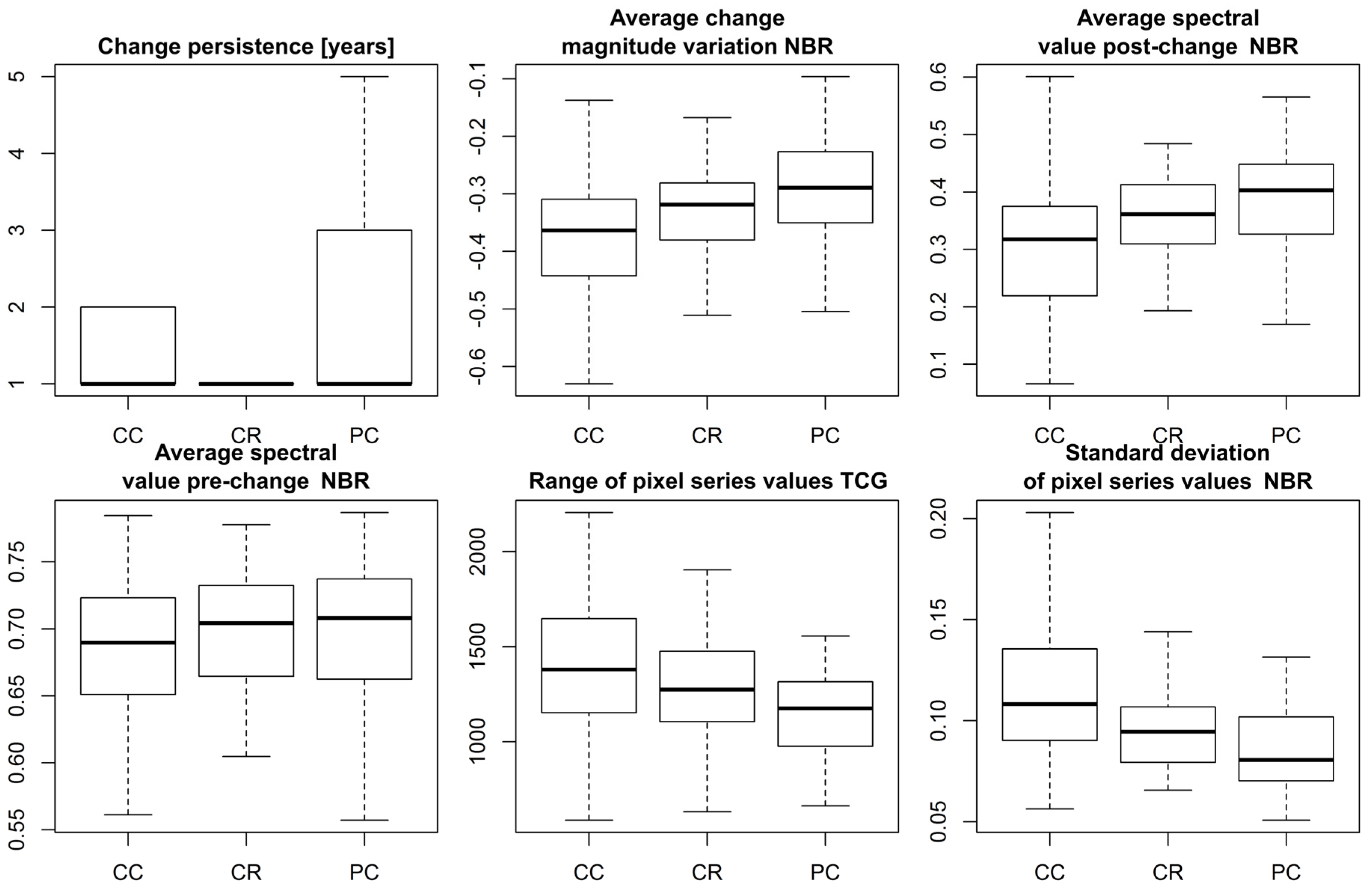
| Metric | Clearcut | Clearcut with Residual | Partial Cut |
|---|---|---|---|
| Change persistence | a | a | b |
| Average change magnitude variation NBR | b | ab | a |
| Average spectral value post-change NBR | b | a | a |
| Average spectral value pre-change NBR | a | a | a |
| Range of pixel series values TCG | b | ab | a |
| Standard deviation of pixel series values NBR | a | a | b |
| Reference Data | ||||
|---|---|---|---|---|
| Clearcut | Residual Cut | Partial Cut | Total | |
| Harvest | 67 | 38 | 21 | 126 |
| Non-stand replacing | 7 | 5 | 9 | 21 |
| Road/infrastructure | 6 | 4 | 3 | 13 |
| Fire | 0 | 0 | 0 | 0 |
| Total | 80 | 47 | 33 | 160 |
| Producer’s accuracy (%) | 83.8 | 79.2 | 63.6 | 78.8 |
| Omission error (%) | 16.2 | 20.8 | 36.4 | |
| Size | Polygons Misclassified | Accuracy (%) |
|---|---|---|
| >5 ha | 5 of 70 | 93.0 |
| 2–5 ha | 14 of 41 | 66.0 |
| <2 ha | 18 of 53 | 66.0s |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jarron, L.R.; Hermosilla, T.; Coops, N.C.; Wulder, M.A.; White, J.C.; Hobart, G.W.; Leckie, D.G. Differentiation of Alternate Harvesting Practices Using Annual Time Series of Landsat Data. Forests 2017, 8, 15. https://doi.org/10.3390/f8010015
Jarron LR, Hermosilla T, Coops NC, Wulder MA, White JC, Hobart GW, Leckie DG. Differentiation of Alternate Harvesting Practices Using Annual Time Series of Landsat Data. Forests. 2017; 8(1):15. https://doi.org/10.3390/f8010015
Chicago/Turabian StyleJarron, Lukas R., Txomin Hermosilla, Nicholas C. Coops, Michael A. Wulder, Joanne C. White, Geordie W. Hobart, and Donald G. Leckie. 2017. "Differentiation of Alternate Harvesting Practices Using Annual Time Series of Landsat Data" Forests 8, no. 1: 15. https://doi.org/10.3390/f8010015
APA StyleJarron, L. R., Hermosilla, T., Coops, N. C., Wulder, M. A., White, J. C., Hobart, G. W., & Leckie, D. G. (2017). Differentiation of Alternate Harvesting Practices Using Annual Time Series of Landsat Data. Forests, 8(1), 15. https://doi.org/10.3390/f8010015