Application of UAV Photogrammetric System for Monitoring Ancient Tree Communities in Beijing



Abstract
:1. Introduction
- On the premise of ensuring the accuracy of forestry survey, it is necessary to study a continuous photogrammetric algorithm and software suitable for monitoring ancient tree communities.
- Using existing technology and algorithms, it is necessary to study the effective and accurate extraction of forest information from the point cloud data.
- Because of the specific situation of ancient tree communities, it is necessary to study the ancient tree structure relationship model and ancient tree growth model to estimate the DBH and age.
2. Materials and Methods
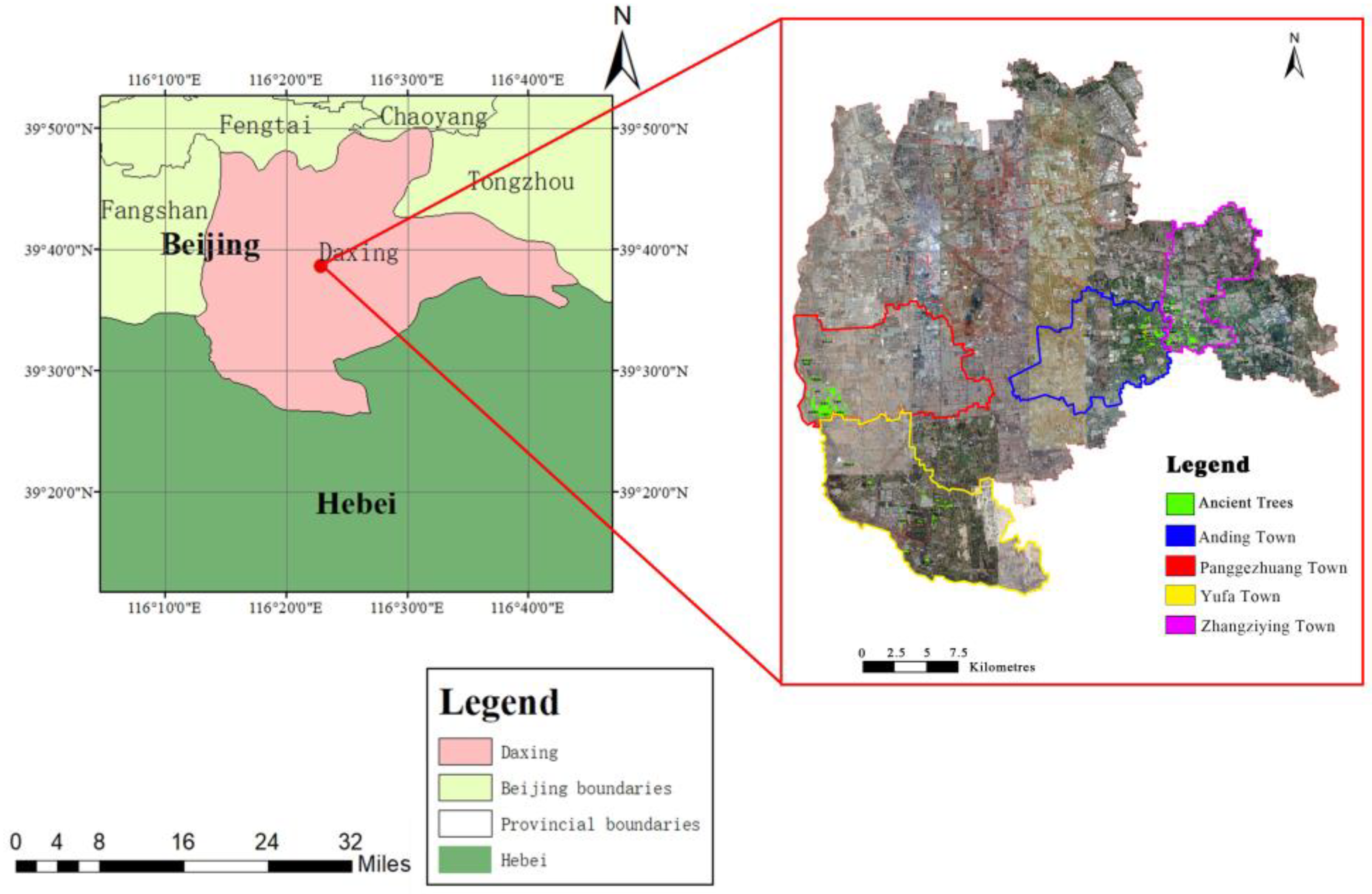
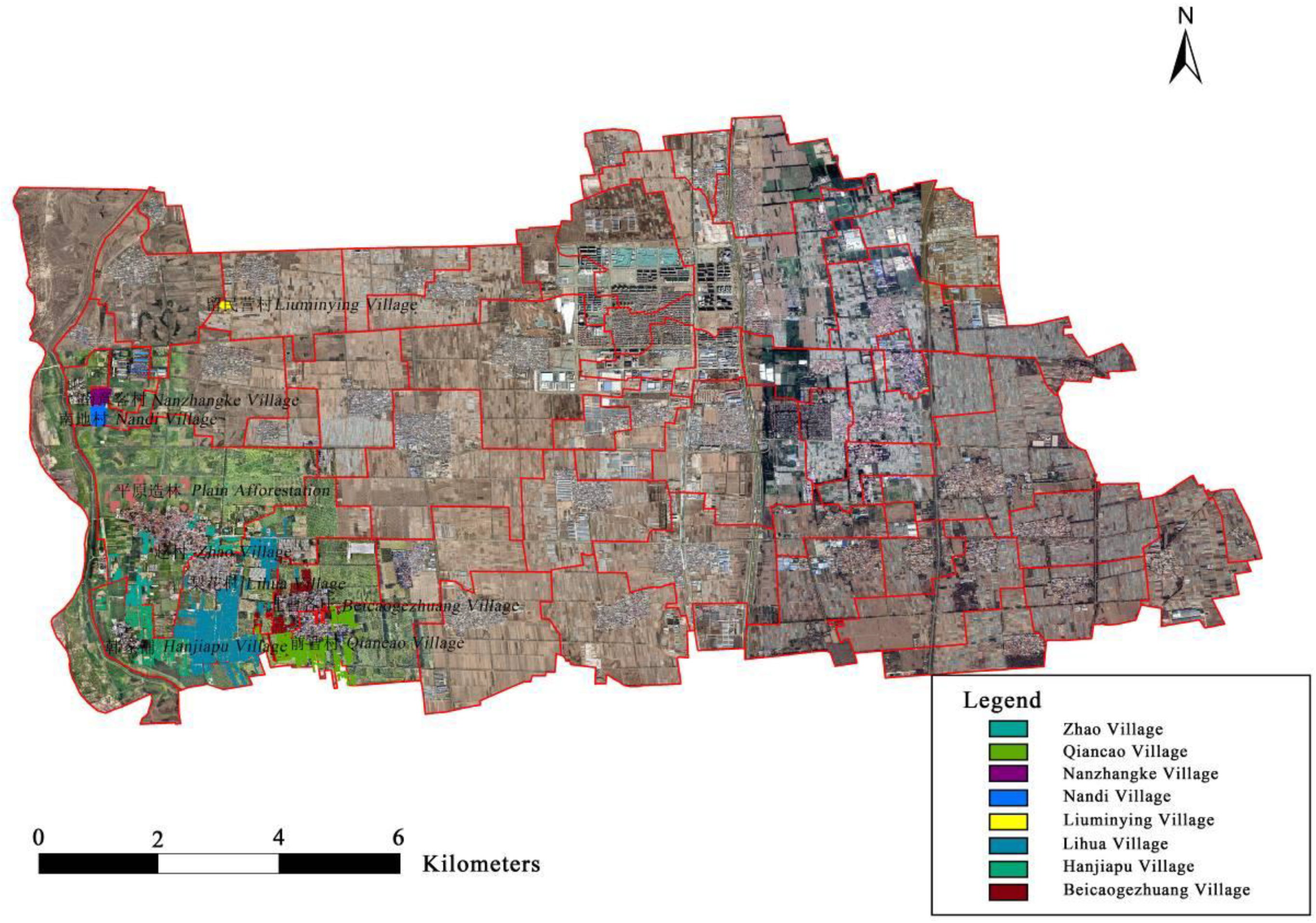
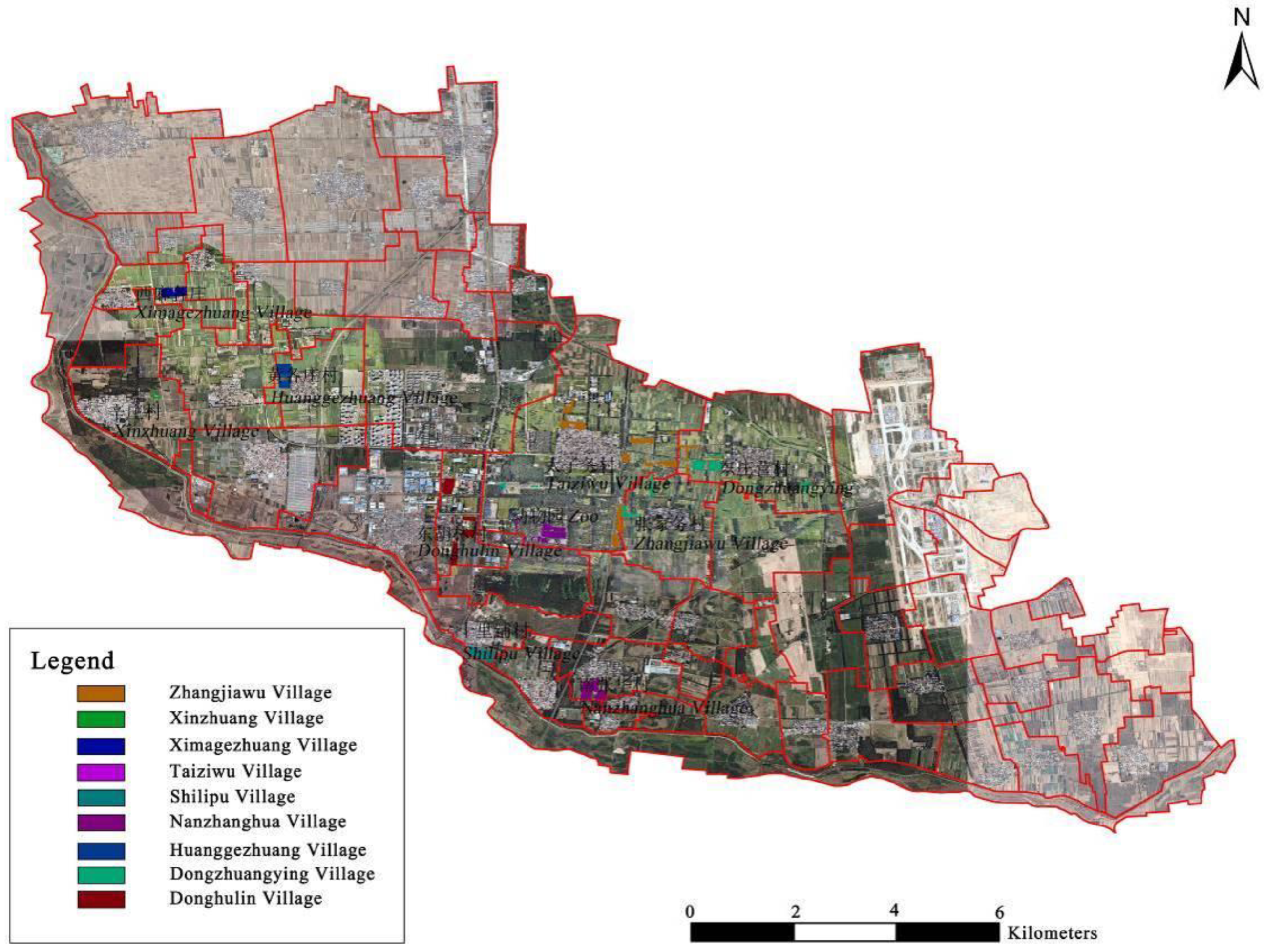
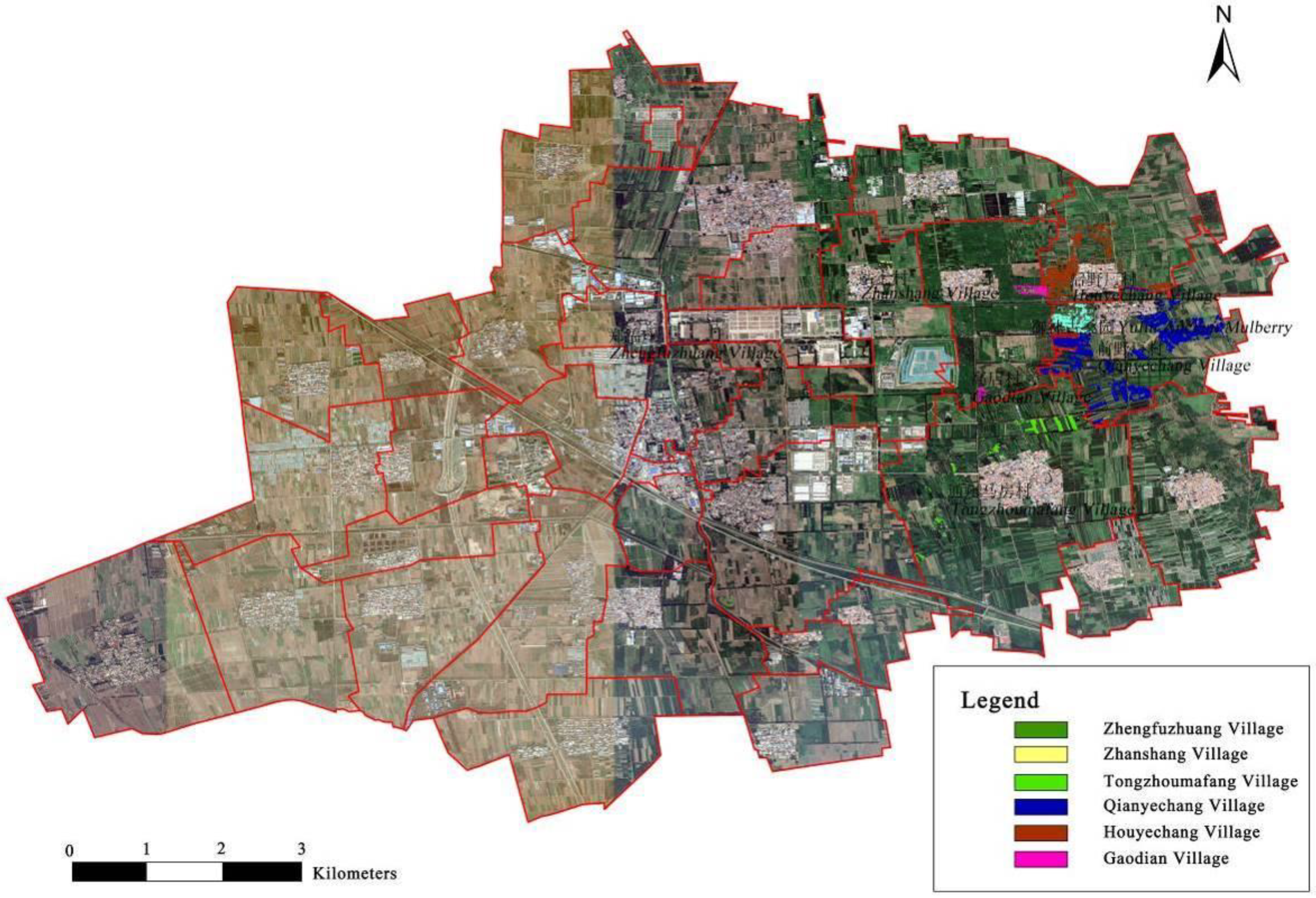
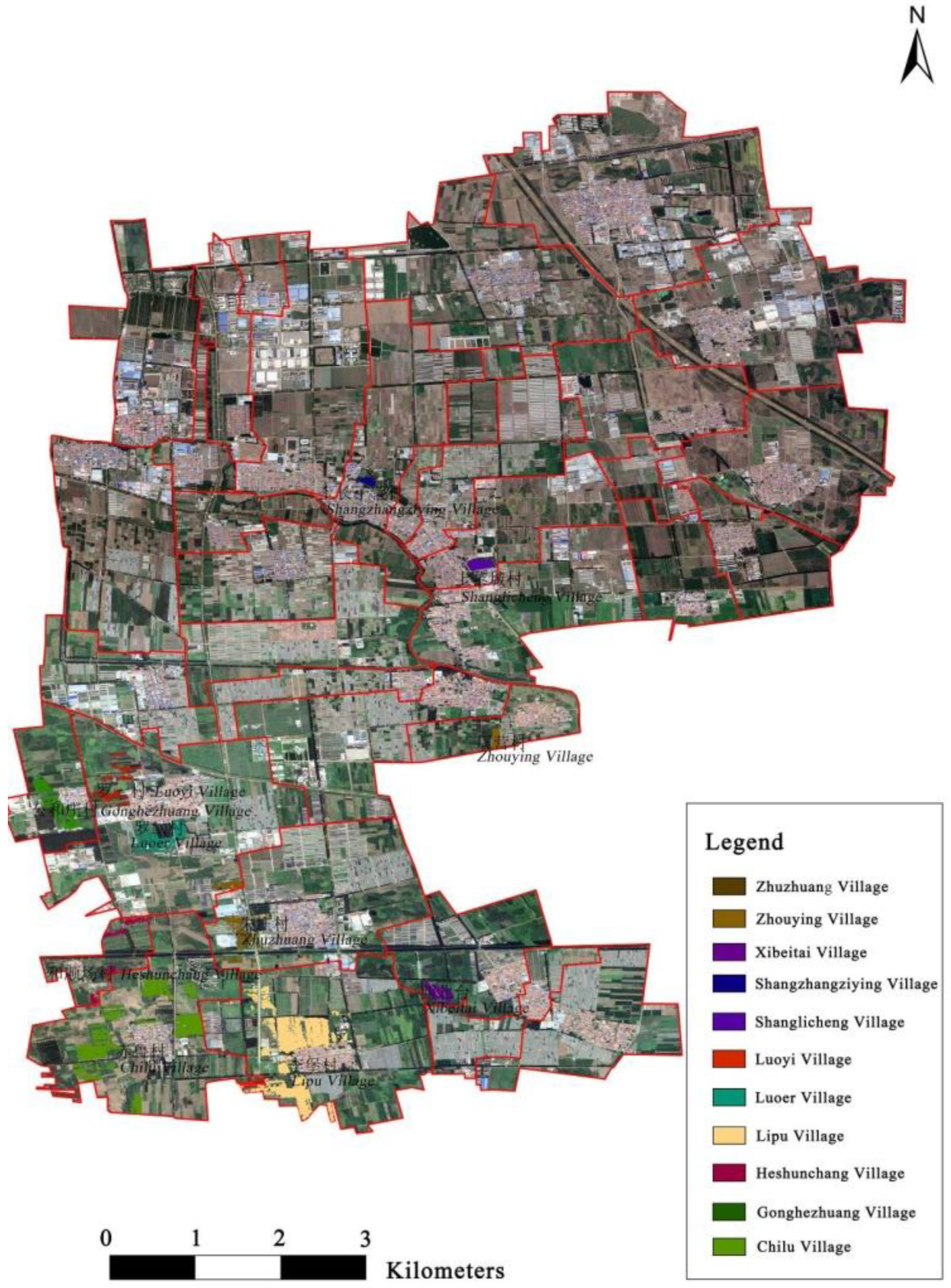
2.1. Profile of Study Sites
2.2. Technical Information
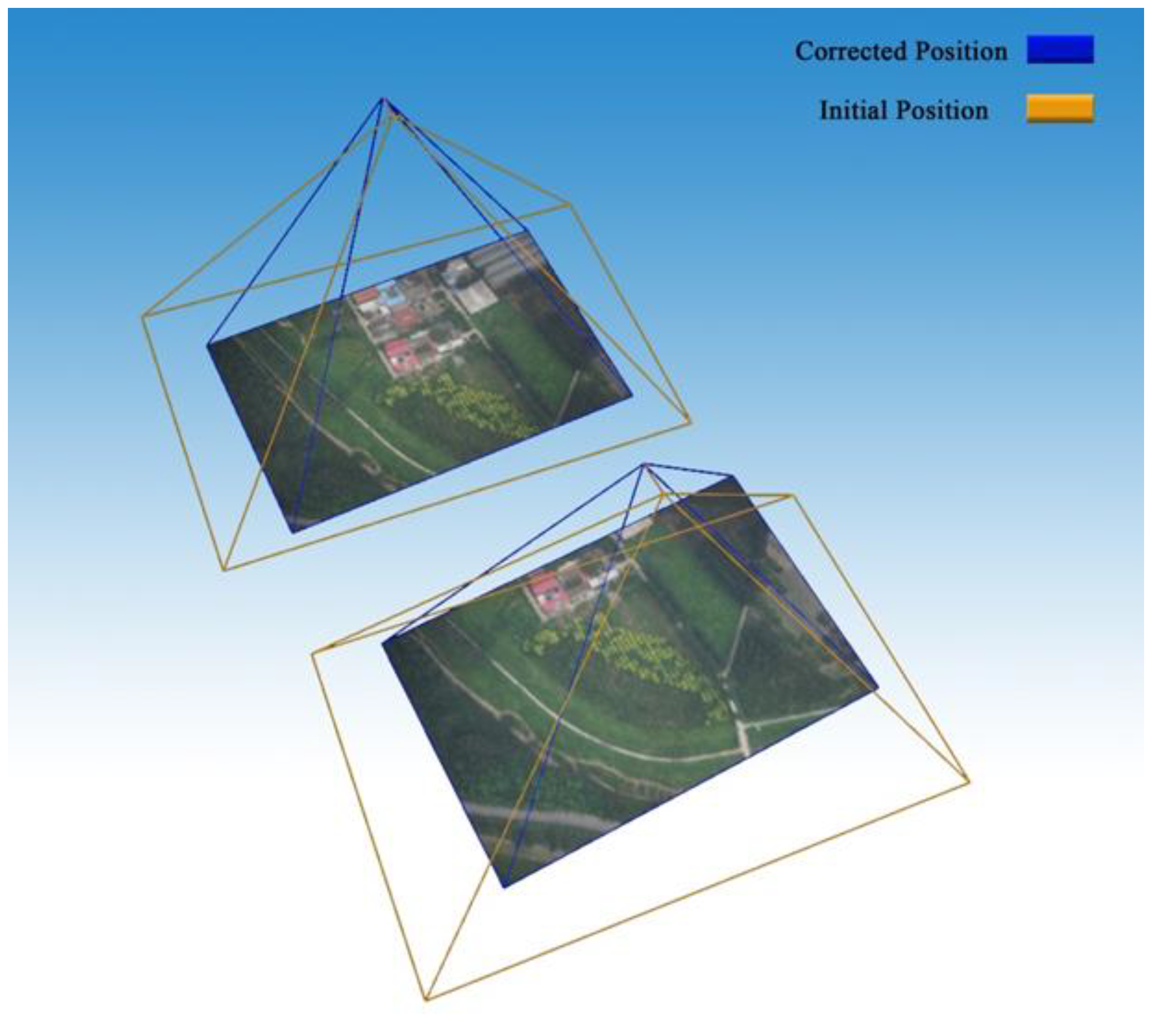
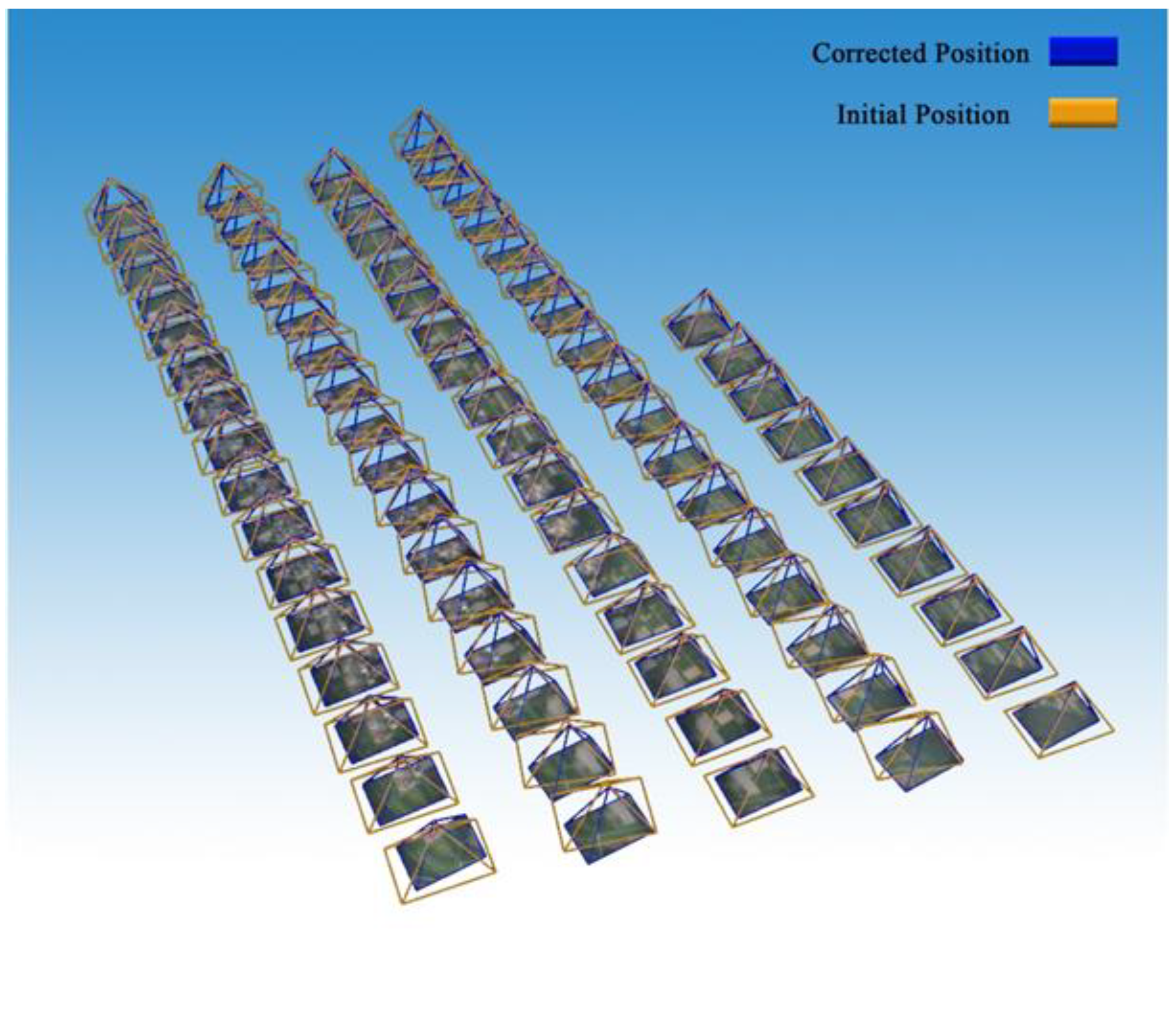
2.3. Research on the Improved UAV Photogrammetric Program
2.4. Research on the Ancient Tree Information Extraction Method
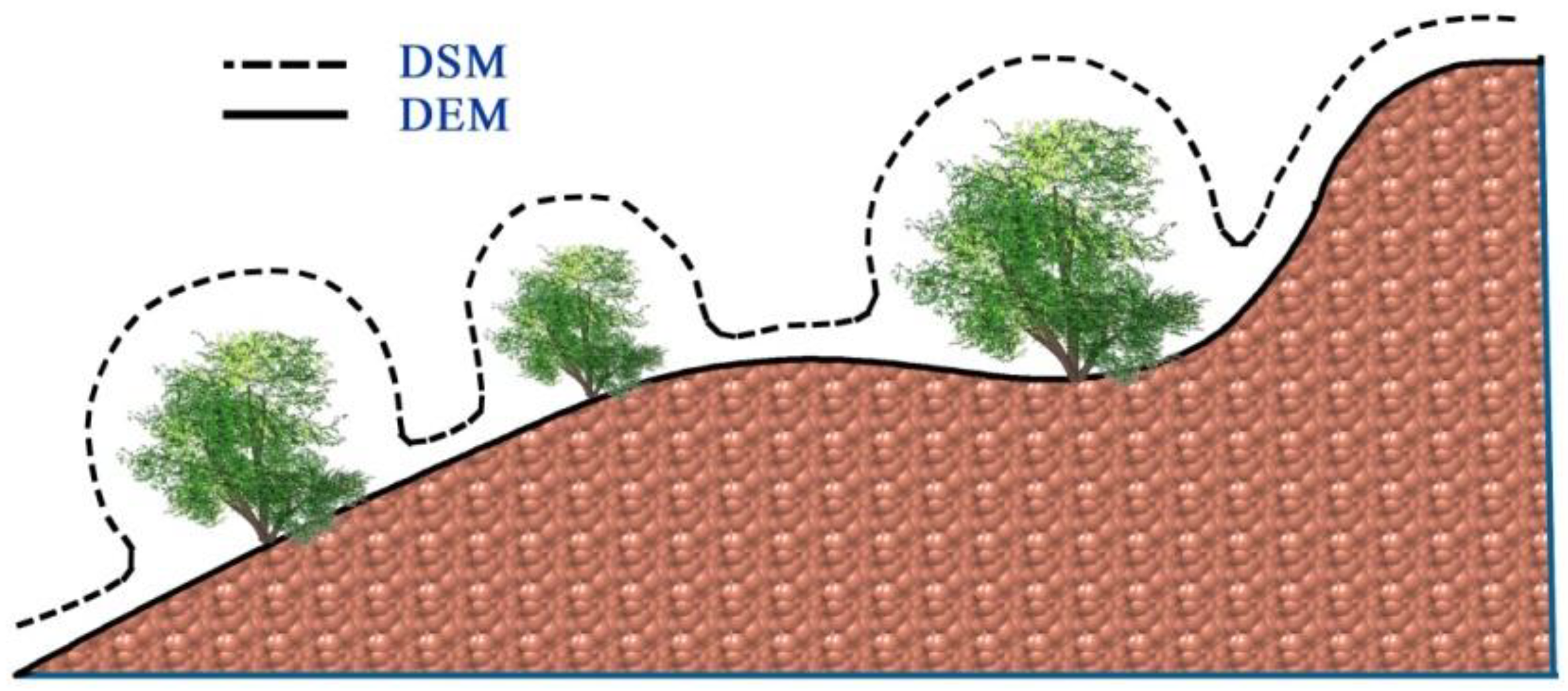
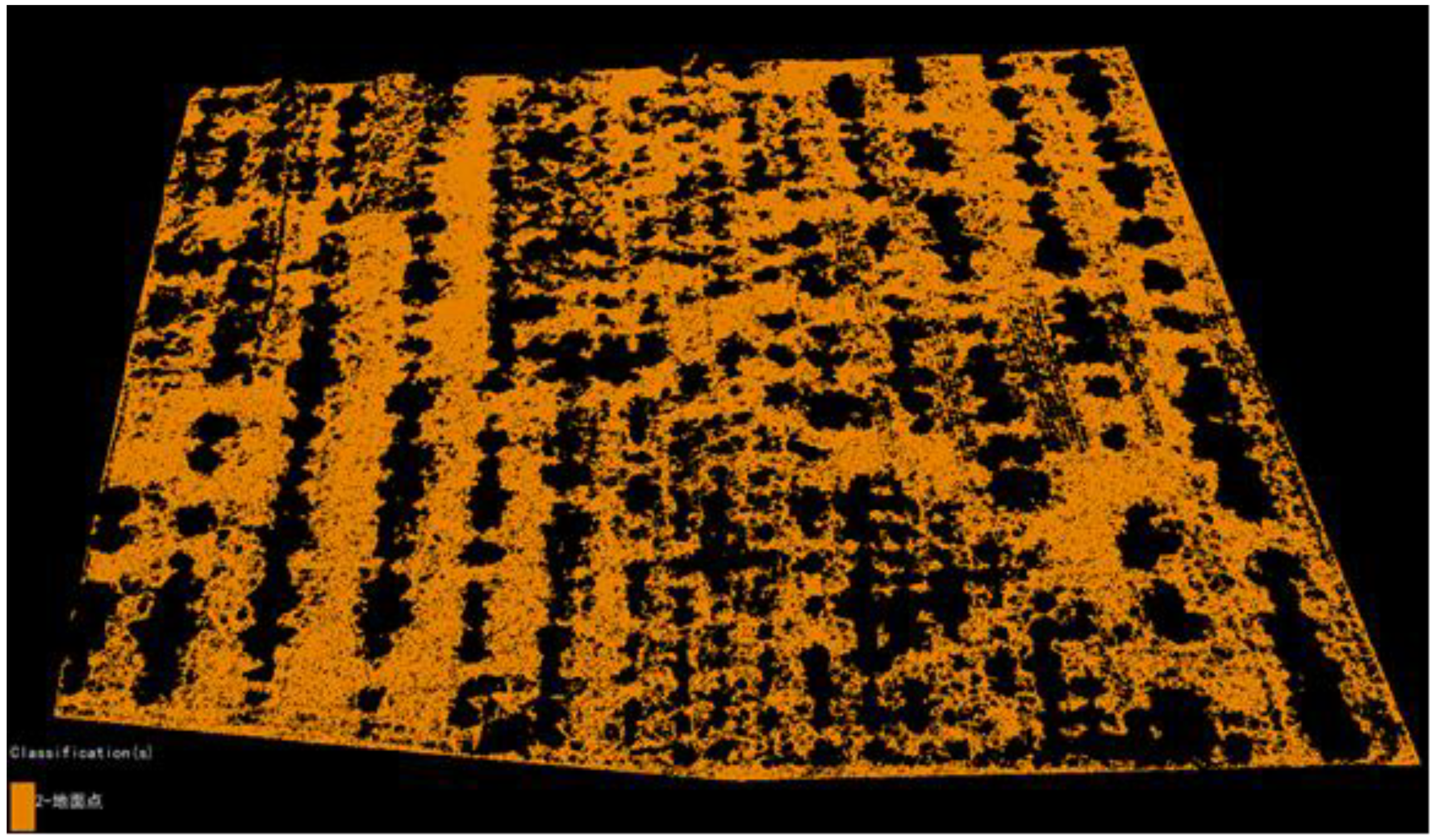
2.4.1. Classification of Ground Point Based on Point Cloud Data
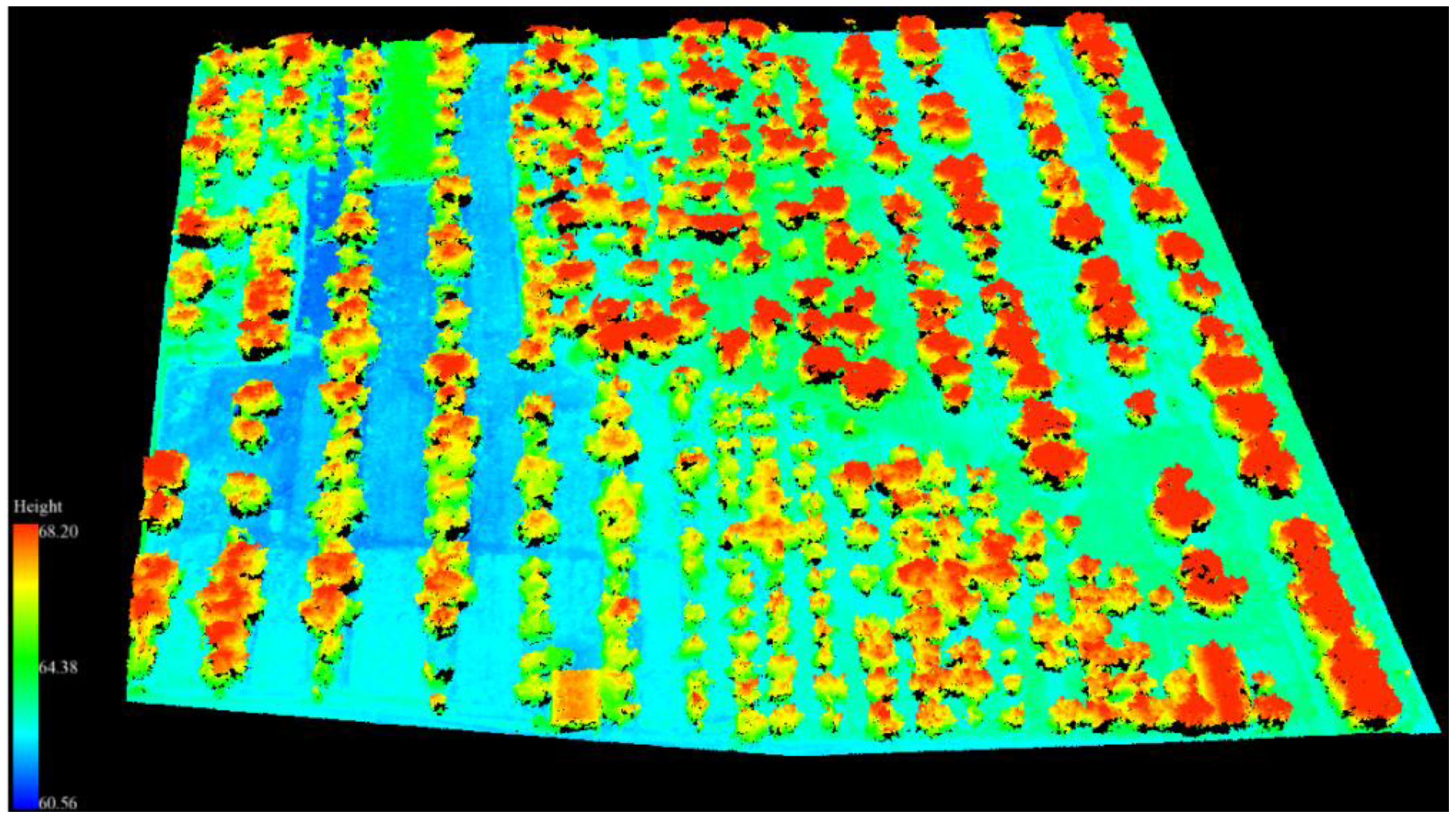
2.4.2. Generation of Raster Data from Point Clouds
2.4.3. Segmentation of Individual Ancient Tree
2.5. Research on the Ancient Tree DBH and Age Prediction Model
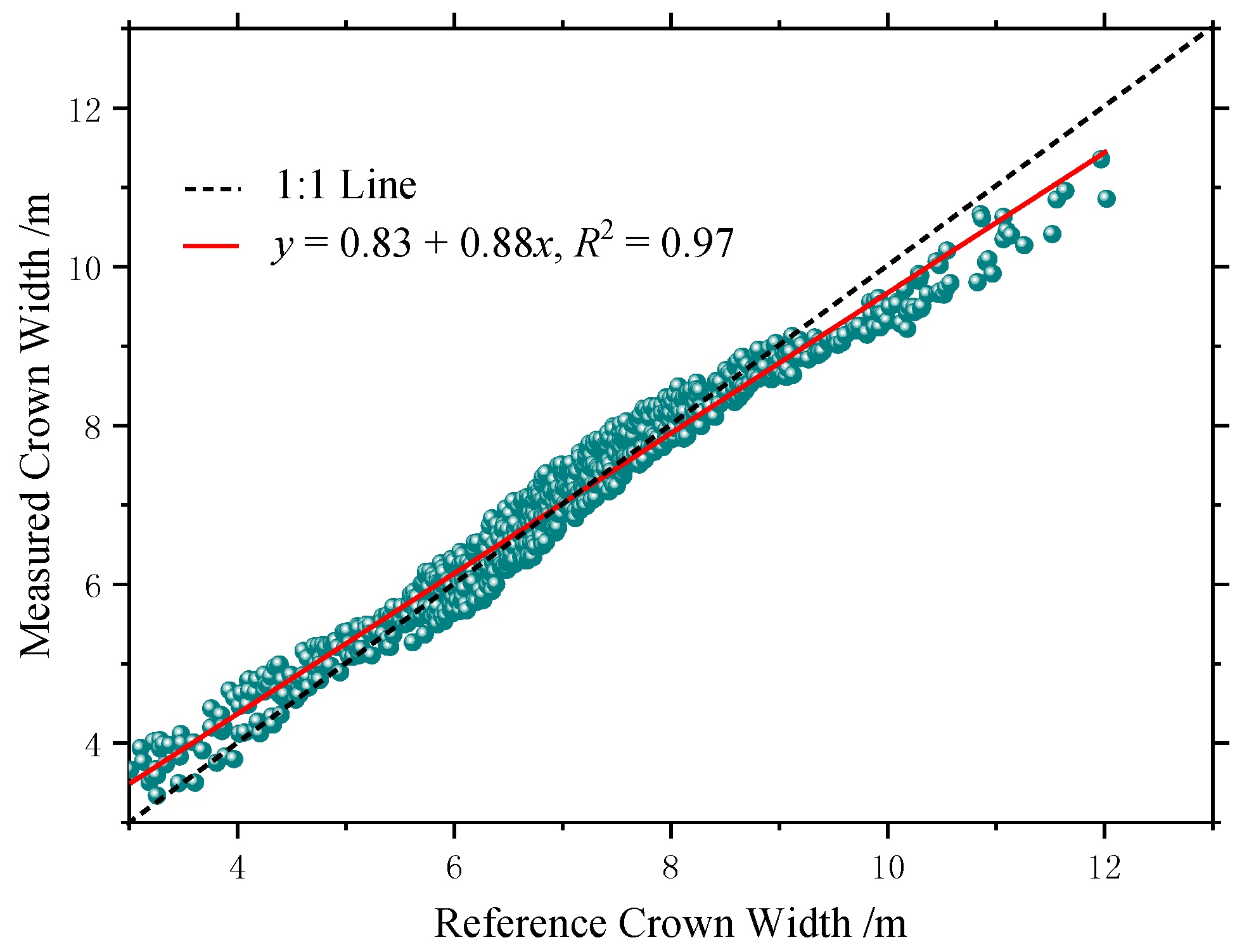
2.5.1. Building of the Height–Crown-Width–DBH Model
2.5.2. Building of the “3 Speed 2 Inflection Points” Optimum Condition Growth Model
3. Results
3.1. Experiment Preparation
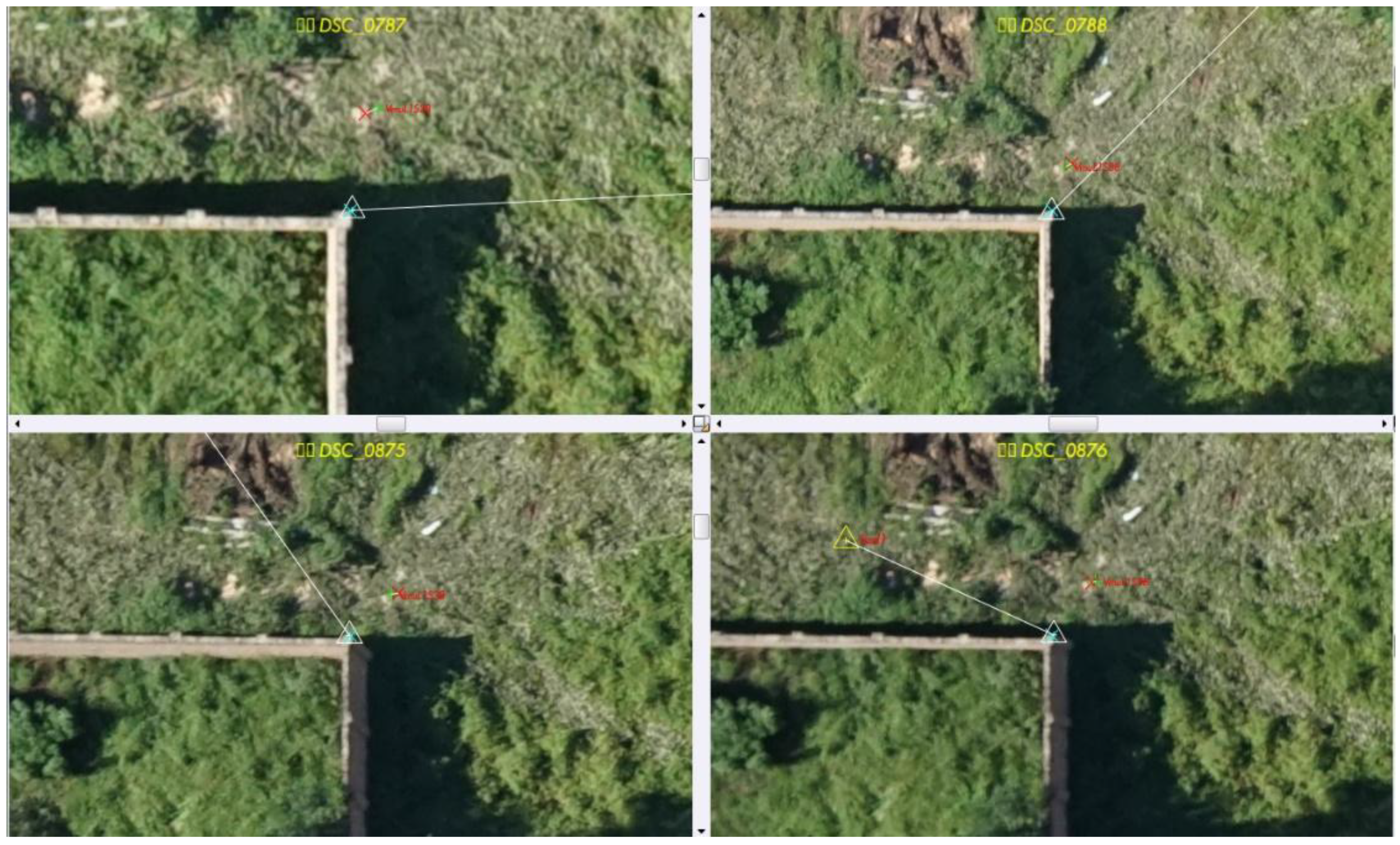
3.2. Analysis of the Improved UAV Photogrammetric Program
3.3. Analysis of the Tree Information Extraction Method
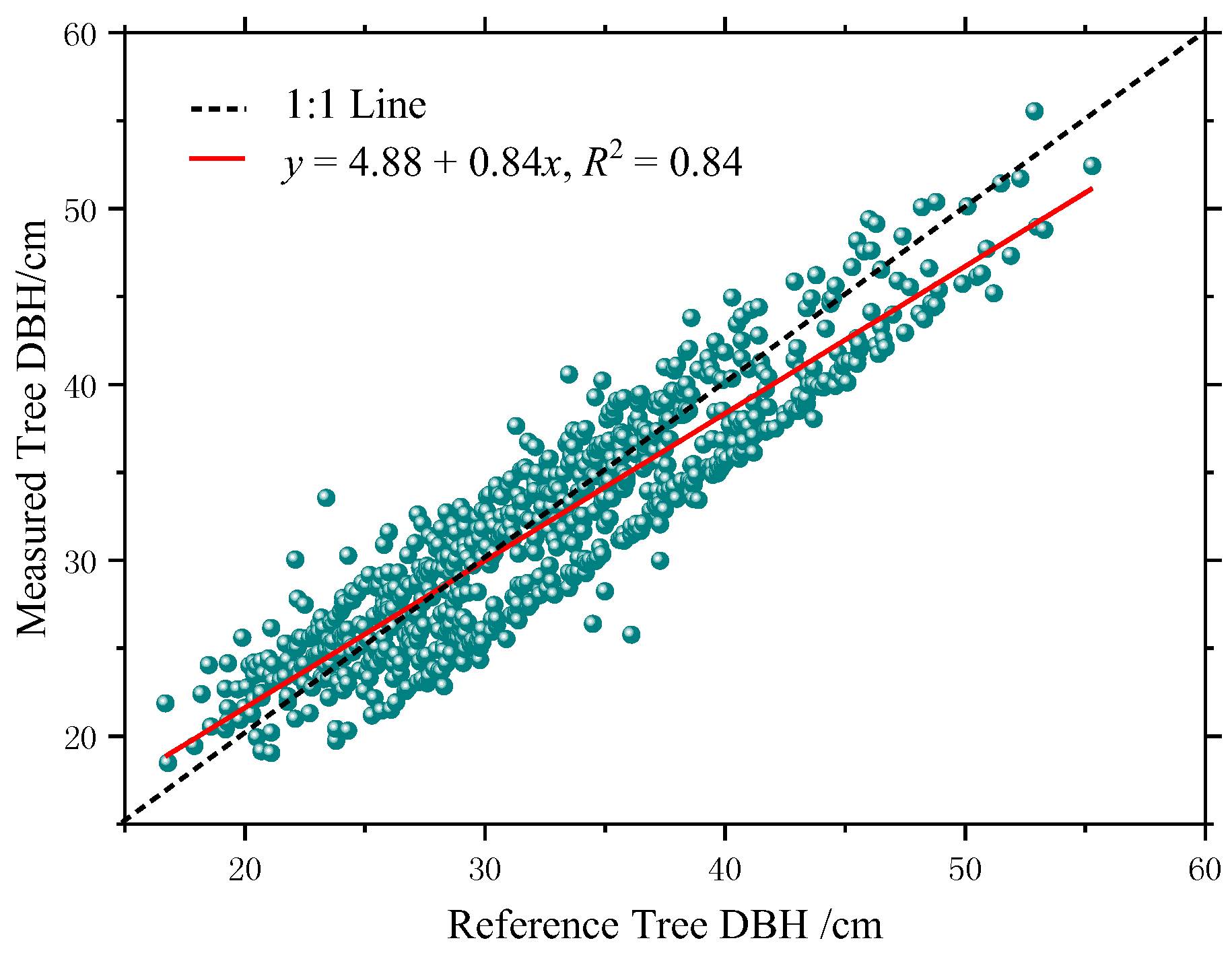
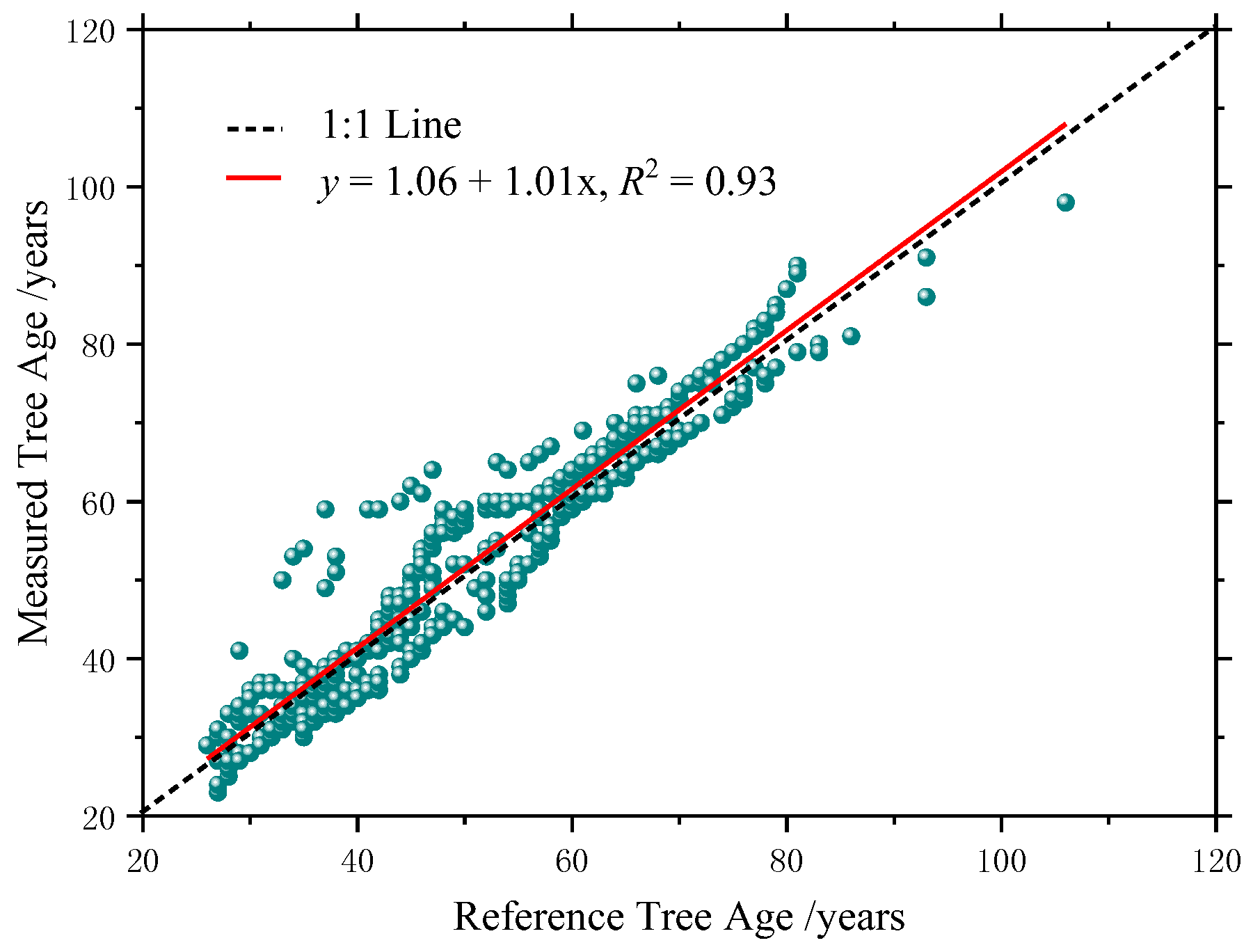
3.4. Analysis of the Ancient Tree DBH and Age Prediction Model
4. Discussion
4.1. Comparative Analysis of UAV Photogrammetry in Forestry Application
4.1.1. UAV Photogrammetry to Obtain Forest Structure
4.1.2. UAV Photogrammetry to Obtain Topography under Tree Crowns
4.2. Error Analysis of Improved UAV Photogrammetric Measurement System
4.3. Error Analysis of the Ancient Tree DBH and Age Prediction Model
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A




References
- Brawn, J.D. Effects of restoring oak savannas on bird communities and populations. Conserv. Biol. 2006, 20, 460–469. [Google Scholar] [CrossRef] [PubMed]
- Gibbons, P.; Lindenmayer, D.; Fischer, J.; Manning, A.; Weinberg, A.; Seddon, J.; Ryan, P.; Barrett, G. The future of scattered trees in agricultural landscapes. Conserv. Biol. 2008, 22, 1309–1319. [Google Scholar] [CrossRef] [PubMed]
- Andersson, M.; Milberg, P.; Bergman, K.-O. Low pre-death growth rates of oak (Quercus robur L.)—Is oak death a long-term process induced by dry years? Ann. For. Sci. 2011, 68, 159–168. [Google Scholar] [CrossRef]
- Lindenmayer, D.B.; Laurance, W.F.; Franklin, J.F. Global decline in large old trees. Science 2012, 338, 1305–1306. [Google Scholar] [CrossRef] [PubMed]
- Buse, J.; Assmann, T.; Friedman, A.L.L.; Rittner, O.; Pavlicek, T. Wood-inhabiting beetles (coleoptera) associated with oaks in a global biodiversity hotspot: A case study and checklist for israel. Insect Conserv. Divers. 2013, 6, 687–703. [Google Scholar] [CrossRef]
- Helama, S.; Vartiainen, M.; Kolström, T.; Peltola, H.; Meriläinen, J. X-ray microdensitometry applied to subfossil tree-rings: Growth characteristics of ancient pines from the southern boreal forest zone in finland at intra-annual to centennial time-scales. Veg. Hist. Archaeobot. 2008, 17, 675–686. [Google Scholar] [CrossRef]
- Briffa, K.R. Annual climate variability in the holocene: Interpreting the message of ancient trees. Quat. Sci. Rev. 2000, 19, 87–105. [Google Scholar] [CrossRef]
- Foody, G.M.; Atkinson, P.M.; Gething, P.W.; Ravenhill, N.A.; Kelly, C.K. Identification of specific tree species in ancient semi-natural woodland from digital aerial sensor imagery. Ecol. Appl. 2005, 15, 1233–1244. [Google Scholar] [CrossRef]
- Qiu, Z.; Feng, Z.; Jiang, J.; Lin, Y.; Xue, S. Application of a continuous terrestrial photogrammetric measurement system for plot monitoring in the Beijing Songshan National Nature Reserve. Remote Sens. 2018, 10, 1080. [Google Scholar] [CrossRef]
- Yan, F.; Ullah, M.R.; Gong, Y.; Feng, Z.; Chowdury, Y.; Wu, L. Use of a no prism Electronic Total Station for field measurements in Pinus tabulaeformis Carr. Stands in china. Biosyst. Eng. 2012, 113, 259–265. [Google Scholar] [CrossRef]
- Qiu, Z.; Feng, Z.; Lu, J.; Sun, R. Design and experiment of forest telescope intelligent dendrometer. Trans. Chin. Soc. Agric. Mach. 2017, 48, 202–207, 213. [Google Scholar]
- Qiu, Z.; Feng, Z.; Jiang, J.; Fan, Y. Design and experiment of forest intelligent surveying and mapping instrument. Trans. Chin. Soc. Agric. Mach. 2017, 48, 179–187. [Google Scholar]
- Van Leeuwen, M.; Nieuwenhuis, M. Retrieval of forest structural parameters using lidar remote sensing. Eur. J. For. Res. 2010, 129, 749–770. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef] [Green Version]
- Murphy, G.E.; Acuna, M.A.; Dumbrell, I. Tree value and log product yield determination in radiata pine (Pinus radiata) plantations in Australia: Comparisons of terrestrial laser scanning with a forest inventory system and manual measurements. Can. J. For. Res. 2010, 40, 2223–2233. [Google Scholar] [CrossRef]
- Pueschel, P.; Newnham, G.; Rock, G.; Udelhoven, T.; Werner, W.; Hill, J. The influence of scan mode and circle fitting on tree stem detection, stem diameter and volume extraction from terrestrial laser scans. ISPRS J. Photogramm. Remote Sens. 2013, 77, 44–56. [Google Scholar] [CrossRef]
- Ryding, J.; Williams, E.; Smith, M.J.; Eichhorn, M.P. Assessing handheld mobile laser scanners for forest surveys. Remote Sens. 2015, 7, 1095–1111. [Google Scholar] [CrossRef]
- Nord-Larsen, T.; Schumacher, J. Estimation of forest resources from a country wide laser scanning survey and national forest inventory data. Remote Sens. Environ. 2012, 119, 148–157. [Google Scholar] [CrossRef]
- Holmgren, J.; Persson, Å. Identifying species of individual trees using airborne laser scanner. Remote Sens. Environ. 2004, 90, 415–423. [Google Scholar] [CrossRef]
- Lim, K.; Treitz, P.; Baldwin, K.; Morrison, I.; Green, J. Lidar remote sensing of biophysical properties of tolerant northern hardwood forests. Can. J. Remote Sens. 2003, 29, 658–678. [Google Scholar] [CrossRef]
- Lim, K.S.; Treitz, P.M. Estimation of above ground forest biomass from airborne discrete return laser scanner data using canopy-based quantile estimators. Scand. J. For. Res. 2004, 19, 558–570. [Google Scholar] [CrossRef] [Green Version]
- Næsset, E. Effects of different flying altitudes on biophysical stand properties estimated from canopy height and density measured with a small-footprint airborne scanning laser. Remote Sens. Environ. 2004, 91, 243–255. [Google Scholar] [CrossRef]
- Patenaude, G.; Hill, R.; Milne, R.; Gaveau, D.; Briggs, B.; Dawson, T. Quantifying forest above ground carbon content using lidar remote sensing. Remote Sens. Environ. 2004, 93, 368–380. [Google Scholar] [CrossRef]
- Leberl, F.; Irschara, A.; Pock, T.; Meixner, P.; Gruber, M.; Scholz, S.; Wiechert, A. Point clouds. Photogramm. Eng. Remote Sens. 2010, 76, 1123–1134. [Google Scholar] [CrossRef]
- Bohlin, J.; Wallerman, J.; Fransson, J.E. Forest variable estimation using photogrammetric matching of digital aerial images in combination with a high-resolution dem. Scand. J. For. Res. 2012, 27, 692–699. [Google Scholar] [CrossRef]
- Järnstedt, J.; Pekkarinen, A.; Tuominen, S.; Ginzler, C.; Holopainen, M.; Viitala, R. Forest variable estimation using a high-resolution digital surface model. ISPRS J. Photogramm. Remote Sens. 2012, 74, 78–84. [Google Scholar] [CrossRef]
- Chiang, K.-W.; Tsai, M.-L.; Chu, C.-H. The development of an uav borne direct georeferenced photogrammetric platform for ground control point free applications. Sensors 2012, 12, 9161–9180. [Google Scholar] [CrossRef] [PubMed]
- Fonstad, M.A.; Dietrich, J.T.; Courville, B.C.; Jensen, J.L.; Carbonneau, P.E. Topographic structure from motion: A new development in photogrammetric measurement. Earth Surf. Process. Landf. 2013, 38, 421–430. [Google Scholar] [CrossRef]
- Dalponte, M.; Bruzzone, L.; Gianelle, D. Fusion of hyperspectral and lidar remote sensing data for classification of complex forest areas. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1416–1427. [Google Scholar] [CrossRef]
- An, N.; Welch, S.M.; Markelz, R.J.C.; Baker, R.L.; Palmer, C.M.; Ta, J.; Maloof, J.N.; Weinig, C. Quantifying time-series of leaf morphology using 2d and 3d photogrammetry methods for high-throughput plant phenotyping. Comput. Electron. Agric. 2017, 135, 222–232. [Google Scholar] [CrossRef]
- Kim, D.; Yun, H.S.; Jeong, S.; Kwon, Y.; Kim, S.; Lee, W.S.; Kim, H. Modeling and testing of growth status for Chinese cabbage and white radish with UAV based rgb imagery. Remote Sens. 2018, 10, 563. [Google Scholar] [CrossRef]
- Kane, V.R.; North, M.P.; Lutz, J.A.; Churchill, D.J.; Roberts, S.L.; Smith, D.F.; McGaughey, R.J.; Kane, J.T.; Brooks, M.L. Assessing fire effects on forest spatial structure using a fusion of landsat and airborne lidar data in yosemite national park. Remote Sens. Environ. 2014, 151, 89–101. [Google Scholar] [CrossRef]
- Zellweger, F.; Braunisch, V.; Baltensweiler, A.; Bollmann, K. Remotely sensed forest structural complexity predicts multi species occurrence at the landscape scale. For. Ecol. Manag. 2013, 307, 303–312. [Google Scholar] [CrossRef]
- Hill, A.; Breschan, J.; Mandallaz, D. Accuracy assessment of timber volume maps using forest inventory data and lidar canopy height models. Forests 2014, 5, 2253–2275. [Google Scholar] [CrossRef]
- St-Onge, B.; Audet, F.-A.; Bégin, J. Characterizing the height structure and composition of a boreal forest using an individual tree crown approach applied to photogrammetric point clouds. Forests 2015, 6, 3899–3922. [Google Scholar] [CrossRef]
- Sankey, T.T.; McVay, J.; Swetnam, T.L.; McClaran, M.P.; Heilman, P.; Nichols, M. Uav hyperspectral and lidar data and their fusion for arid and semi-arid land vegetation monitoring. Remote Sens. Ecol. Conserv. 2018, 4, 20–33. [Google Scholar] [CrossRef]
- Sankey, T.; Donager, J.; McVay, J.; Sankey, J.B. Uav lidar and hyperspectral fusion for forest monitoring in the southwestern USA. Remote Sens. Environ. 2017, 195, 30–43. [Google Scholar] [CrossRef]
- Corona, P.; Fattorini, L. Area-based lidar-assisted estimation of forest standing volume. Can. J. For. Res. 2008, 38, 2911–2916. [Google Scholar] [CrossRef] [Green Version]
- Steinmann, K.; Mandallaz, D.; Ginzler, C.; Lanz, A. Small area estimations of proportion of forest and timber volume combining lidar data and stereo aerial images with terrestrial data. Scand. J. For. Res. 2013, 28, 373–385. [Google Scholar] [CrossRef]
- Næsset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ. 2002, 80, 88–99. [Google Scholar] [CrossRef]
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A photogrammetric workflow for the creation of a forest canopy height model from small unmanned aerial system imagery. Forests 2013, 4, 922–944. [Google Scholar] [CrossRef]
- Lee, H.; Slatton, K.C.; Roth, B.E.; Cropper, W., Jr. Adaptive clustering of airborne lidar data to segment individual tree crowns in managed pine forests. Int. J. Remote Sens. 2010, 31, 117–139. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Yu, X.; Vastaranta, M.; Hyyppä, H.; Kukko, A.; Holopainen, M.; Heipke, C.; Hirschmugl, M.; Morsdorf, F. An international comparison of individual tree detection and extraction using airborne laser scanning. Remote Sens. 2012, 4, 950–974. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A new method for segmenting individual trees from the lidar point cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef]
- Gonzalez-Benecke, C.; Gezan, S.A.; Samuelson, L.J.; Cropper, W.P.; Leduc, D.J.; Martin, T.A. Estimating Pinus palustris tree diameter and stem volume from tree height, crown area and stand-level parameters. J. For. Res. 2014, 25, 43–52. [Google Scholar] [CrossRef]
- Carrer, M.; Urbinati, C. Age-dependent tree-ring growth responses to climate in Larix decidua and Pinus cembra. Ecology 2004, 85, 730–740. [Google Scholar] [CrossRef]
- Climent, J.; Chambel, M.; Pérez, E.; Gil, L.; Pardos, J. Relationship between heartwood radius and early radial growth, tree age, and climate in Pinus canariensis. Can. J. For. Res. 2002, 32, 103–111. [Google Scholar] [CrossRef]
- Othman, M.F.; Shazali, K. Wireless sensor network applications: A study in environment monitoring system. Procedia Eng. 2012, 41, 1204–1210. [Google Scholar] [CrossRef]
- Carrivick, J.L.; Smith, M.W.; Quincey, D.J. Structure from Motion in the Geosciences; John Wiley & Sons: Chichester, UK, 2016. [Google Scholar]
- Smith, M.; Carrivick, J.; Quincey, D. Structure from motion photogrammetry in physical geography. Prog. Phys. Geogr. 2016, 40, 247–275. [Google Scholar] [CrossRef]
- Mosbrucker, A.R.; Major, J.J.; Spicer, K.R.; Pitlick, J. Camera system considerations for geomorphic applications of sfm photogrammetry. Earth Surf. Process. Landf. 2017, 42, 969–986. [Google Scholar] [CrossRef]
- McLauchlan, P.F.; Jaenicke, A. Image mosaicing using sequential bundle adjustment. Image Vis. Comput. 2002, 20, 751–759. [Google Scholar] [CrossRef] [Green Version]
- Chow, J.C.; Lichti, D.D. Photogrammetric bundle adjustment with self-calibration of the primesense 3d camera technology: Microsoft kinect. IEEE Access 2013, 1, 465–474. [Google Scholar] [CrossRef]
- Mouragnon, E.; Lhuillier, M.; Dhome, M.; Dekeyser, F.; Sayd, P. Generic and real-time structure from motion using local bundle adjustment. Image Vis. Comput. 2009, 27, 1178–1193. [Google Scholar] [CrossRef] [Green Version]
- Di, K.; Liu, Y.; Liu, B.; Peng, M.; Hu, W. A self-calibration bundle adjustment method for photogrammetric processing of chang ’E-2 stereo lunar imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5432–5442. [Google Scholar]
- Schnabel, R.; Wahl, R.; Klein, R. Efficient Ransac for Point-Cloud Shape Detection; Computer Graphics Forum; Wiley Online Library: Oxford, UK, 2007; pp. 214–226. [Google Scholar]
- Dobbertin, M. Tree growth as indicator of tree vitality and of tree reaction to environmental stress: A review. Eur. J. For. Res. 2005, 124, 319–333. [Google Scholar] [CrossRef]
- Zeide, B. Analysis of growth formulas. For. Sci. 1993, 39, 594–616. [Google Scholar]
- Weiner, J.; Thomas, S.C. The nature of tree growth and the “age-related decline in forest productivity”. Oikos 2001, 94, 374–376. [Google Scholar] [CrossRef]
- Moulia, B.; Coutand, C.; Lenne, C. Posture control and skeletal mechanical acclimation in terrestrial plants: Implications for mechanical modeling of plant architecture. Am. J. Bot. 2006, 93, 1477–1489. [Google Scholar] [CrossRef] [PubMed]
- Dandois, J.P.; Ellis, E.C. Remote sensing of vegetation structure using computer vision. Remote Sens. 2010, 2, 1157–1176. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Diaz-Varela, R.; Angileri, V.; Loudjani, P. Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (uav) and automatic 3d photo-reconstruction methods. Eur. J. Agron. 2014, 55, 89–99. [Google Scholar] [CrossRef]
- Ni, W.; Liu, J.; Zhang, Z.; Sun, G.; Yang, A. Evaluation of UAV-Based Forest Inventory System Compared with Lidar Data. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 3874–3877. [Google Scholar]
- White, J.C.; Stepper, C.; Tompalski, P.; Coops, N.C.; Wulder, M.A. Comparing als and image-based point cloud metrics and modelled forest inventory attributes in a complex coastal forest environment. Forests 2015, 6, 3704–3732. [Google Scholar] [CrossRef]
- Dandois, J.P.; Ellis, E.C. High spatial resolution three-dimensional mapping of vegetation spectral dynamics using computer vision. Remote Sens. Environ. 2013, 136, 259–276. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Content | Parameters Value |
|---|---|
| Wingspan | 1700 mm |
| Length | 900 mm |
| Dynamical System | Dynamoelectric system |
| Materials | Aeronautical Composite |
| Maximum Take-off Weight | 5.5 kg |
| Aircraft Standard Load | 1.5 kg |
| Speed | 70–120 km/h |
| Cruising Speed | 80–90 km/h |
| Maximum Flying Distance | 100 km |
| Cruising Range | 80 km |
| Cruising Duration | 90 min |
| Maximum Flying Altitude | 4500 m |
| Wind Resistance | 10.8–13.8 m/s |
| Working Temperature | −10 °C–50 °C |
| Radio Range | 30 km |
| Calibration Content | Calibration Value |
|---|---|
| Principal Point x0 | −0.188561 |
| Principal Point y0 | −0.138128 |
| Focal Length f | 36.289444 mm |
| Pixel Size | 4.88 μm |
| Picture Format (pixel) | 7360 × 4912 |
| Coefficient of Radial Distortion k1 | −5.145797 × 10−5 |
| Coefficient of Radial Distortion k2 | 1.583367 × 10−7 |
| Coefficient of Radial Distortion k3 | 1.829755 × 10−5 |
| Tangential Distortion Factor p1 | −6.050453 × 10−6 |
| Tangential Distortion Factor p2 | −1.739164 × 10−5 |
| Instrument Specifications | Specific Parameters |
|---|---|
| Signal Tracking | 220 signal channel |
| BDS B1, B2, B3 | |
| GPS L1C/A, L1C, L2C, L2E, L5 | |
| GLONASS L1C/A, L1P, L2C/A, L2P, L3 | |
| SBAS L1C/A, L5 | |
| Galileo GIOVE-A, and GIOVE-B, E1, E5A, E5B | |
| QZSS, WAAS, MSAS, EGNOS, GAGAN (Veripos) | |
| GNSS Features | Positioning output frequency, 1 Hz–50 Hz |
| Initialization time, Less than 10 s | |
| Able to support GNSS constellation signals from all current and future plans | |
| High reliable carrier tracking technology | |
| Intelligent dynamic sensitivity positioning technology | |
| High precision positioning processing engine | |
| Differential positioning accuracy | Horizontal: 0.25 m + 1 ppm RMS |
| Vertical: 0.50 m + 1 ppm RMS | |
| SBAS differential positioning accuracy: Typical <5m 3DRMS | |
| Static GNSS measurements | ±(2.5 mm + 1 mm/km × d), d is the distance of the measured point, km |
| Real-time dynamic measurement (RTK) | ±(8 mm + 1 mm/km × d), d is the distance of the measured point, km |
| Data Sources | Data Source A | Data Source B | |
|---|---|---|---|
| Fundamental orientation points | RMSE of plane | 0.233 m | 0.442 m |
| Maximum error of plane | 0.317 m | 0.762 m | |
| RMSE of elevation | 0.154 m | 1.516 m | |
| Maximum error of elevation | 0.196 m | 2.289 m | |
| Check points | RMSE of plane | 0.299 m | 0.314 m |
| Maximum error of plane | 0.691 m | 0.714 m | |
| RMSE of elevation | 0.873 m | 1.508 m | |
| Maximum error of elevation | 1.498 m | 2.686 m | |
| RMSE | RMSE% | Bias | Bias% | |
|---|---|---|---|---|
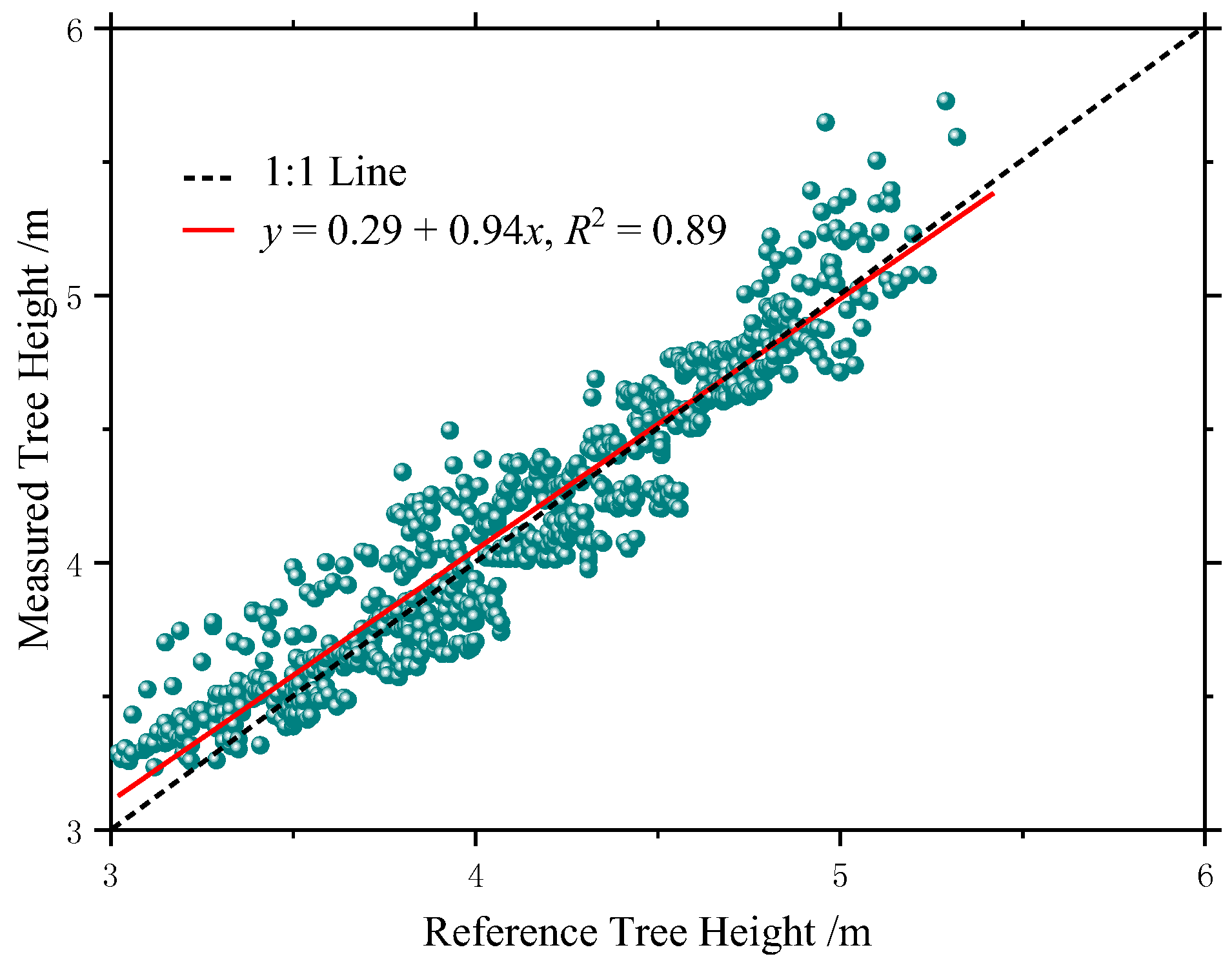
| Tree Height (m) | 0.1814 m | 4.39% | 0.0408 m | 0.99% |
| Crown width (m) | 0.3292 m | 4.73% | 0.0244 m | 0.35% |
| Factor | Estimated Value | Standard Error | Lower Limit of 95% Confidence Interval | Upper Limit of 95% Confidence Interval |
|---|---|---|---|---|
| 1.570 | 0.193 | 1.191 | 1.950 | |
| 1.428 | 0.052 | 1.325 | 1.530 | |
| 2.296 | 0.242 | 1.821 | 2.771 | |
| 1.119 | 0.035 | 1.051 | 1.187 |
| RMSE | RMSE% | Bias | Bias% | |
|---|---|---|---|---|
| DBH (cm) | 3.0039 cm | 9.25% | −0.4193 cm | −1.29% |
| Factor | Estimated Value | Standard Value | Lower Limit of 95% Confidence Interval | Upper Limit of 95% Confidence Interval |
|---|---|---|---|---|
| 26.959 | 0.747 | 25.494 | 28.424 | |
| 12.076 | 0.455 | 11.184 | 12.969 | |
| 0.522 | 0.035 | 0.453 | 0.590 | |
| 25.907 | 0.866 | 24.208 | 27.605 | |
| 1.341 | 0.054 | 1.236 | 1.447 | |
| 74.661 | 3.330 | 68.131 | 81.191 | |
| 5.739 | 1.778 | 2.207 | 9.272 | |
| 1.326 | 0.521 | 0.290 | 2.361 | |
| 1.147 | 0.006 | 1.135 | 1.159 |
| RMSE | RMSE% | Bias | Bias% | |
|---|---|---|---|---|
| Tree Age/years | 4.3753 years | 8.77% | 1.5141 years | 3.03% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, Z.; Feng, Z.-K.; Wang, M.; Li, Z.; Lu, C. Application of UAV Photogrammetric System for Monitoring Ancient Tree Communities in Beijing. Forests 2018, 9, 735. https://doi.org/10.3390/f9120735
Qiu Z, Feng Z-K, Wang M, Li Z, Lu C. Application of UAV Photogrammetric System for Monitoring Ancient Tree Communities in Beijing. Forests. 2018; 9(12):735. https://doi.org/10.3390/f9120735
Chicago/Turabian StyleQiu, Zixuan, Zhong-Ke Feng, Mingming Wang, Zhenru Li, and Chao Lu. 2018. "Application of UAV Photogrammetric System for Monitoring Ancient Tree Communities in Beijing" Forests 9, no. 12: 735. https://doi.org/10.3390/f9120735
APA StyleQiu, Z., Feng, Z. -K., Wang, M., Li, Z., & Lu, C. (2018). Application of UAV Photogrammetric System for Monitoring Ancient Tree Communities in Beijing. Forests, 9(12), 735. https://doi.org/10.3390/f9120735