Vehicle Politeness in Driving Situations


Abstract
:1. Introduction
2. Related Works
2.1. Vehicles as Driving Partners
2.2. Politeness for Cooperation
3. Method
3.1. Participants
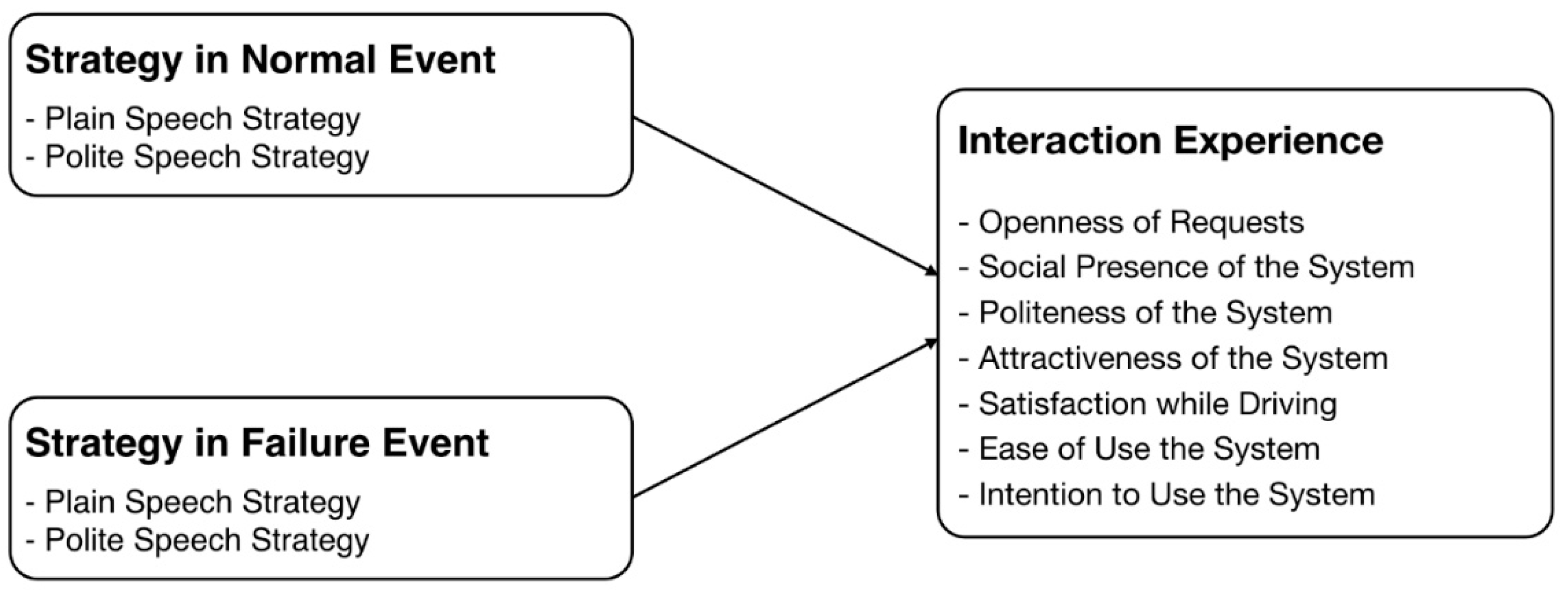
3.2. Research Design
3.2.1. Experimental Condition
3.2.2. Experimental Environment
3.3. Measurements
3.4. Procedure
4. Results
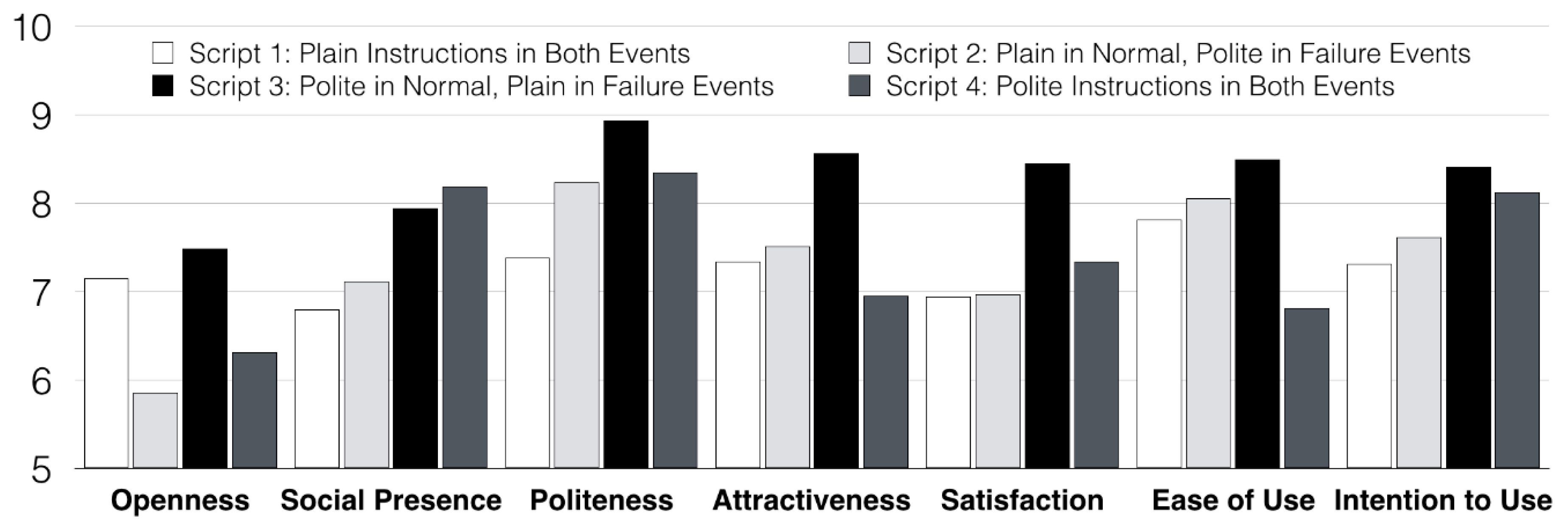
4.1. Initial Comparison of Politeness Strategies
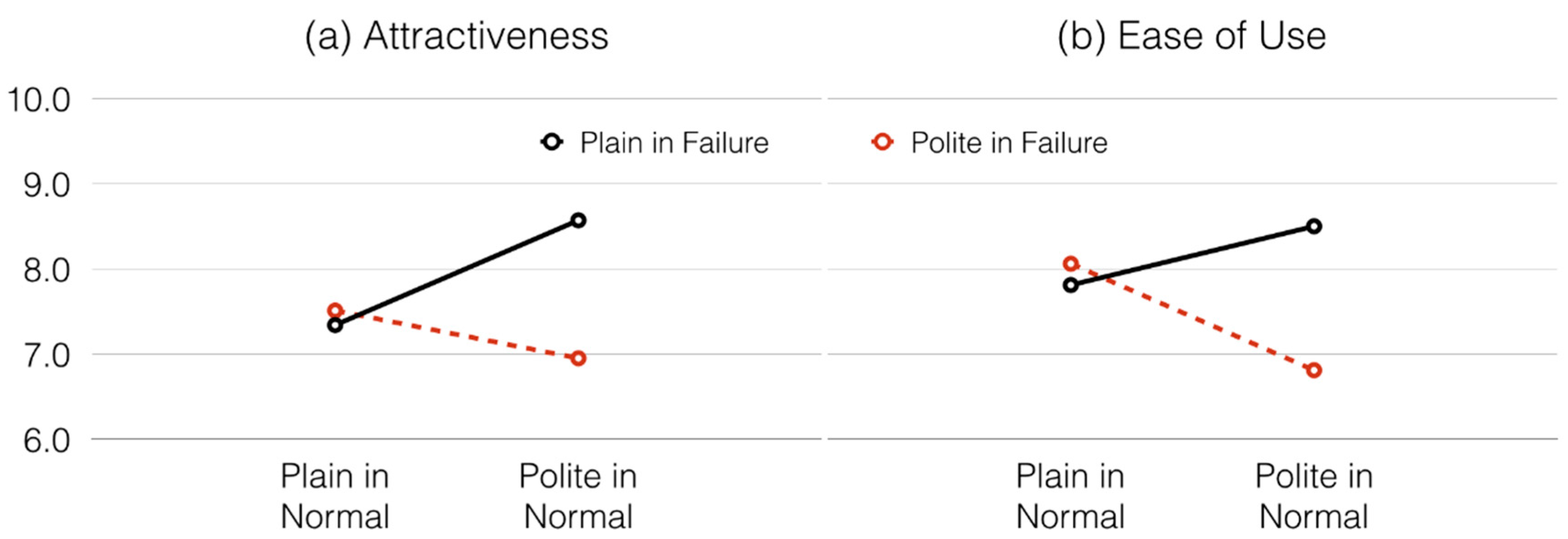
4.2. Hypothesis Testing
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DVs (Cronbach’s Alpha) | Questionnaire Item |
|---|---|
| Openness (α = 0.65) | I felt duty to follow the instructions (Reversed). The instructions forced me to follow (Reversed). The instructions were burdensome to me (Reversed). |
| Ease of Use (α = 0.74) | The instructions were easy to understand. I could know the meaning of the requests. |
| Social Presence (α = 0.87) | I felt the vehicle’s presence vividly. I felt like driving together with the vehicle. I involved in interaction with the vehicle. I immersed in interaction with the vehicle. The vehicle influenced my driving. I closely interact with the vehicle. |
| Politeness (α = 0.91) | The vehicle had etiquettes. The vehicle was kind to me. The vehicle courteous to me. |
| Attractiveness (α = 0.92) | The vehicle was favorable. I like the vehicle. I felt intimacy to the vehicle. |
| Satisfaction (α = 0.95) | I was happy to drive. I enjoyed the driving. I was pleased to drive. I was satisfied while driving. |
| Intention to Use (α = 0.94) | I will use the system. I have intention to use the system. I wish other drivers to use the system. |
References
- Takada, Y.; Boer, E.R.; Sawaragi, T. Driver Assist System for Human-Machine Interaction. Cogn. Tech. Work 2017, 19, 819–836. [Google Scholar] [CrossRef]
- Marinik, A.; Bishop, R.; Fitchett, V.L.; Morgan, J.F.; Trimble, T.E. Human Factors Evaluation of Level 2 and Level 3 Automated Driving Concepts: Concepts of Operation. 2014. Available online: https://www.nhtsa.gov/sites/nhtsa.dot.gov/files/812043_hf-evaluationlevel2andlevel3automateddrivingconceptsv2.pdf (accessed on 25 December 2018).
- Blanco, M.; Atwood, J.; Vasquez, H.M.; Trimble, T.E. Human Factors Evaluation of Level 2 and Level 3 Automated Driving Concepts. 2015. Available online: https://www.nhtsa.gov/sites/nhtsa.dot.gov/files/812182_humanfactorseval-l2l3-automdrivingconcepts.pdf (accessed on 25 December 2018).
- Guo, C.; Sentouh, C.; Popieul, J.-C.; Haué, J.-B.; Langlois, S.; Loeillet, J.-J.; Soualmi, B.; That, T.N. Cooperation Between Driver and Automated Driving System: Implementation and Evaluation. Transp. Res. Part F Psychol. Behav. 2018, 1–12. [Google Scholar] [CrossRef]
- Parasuraman, R.; Wickens, C.D. Humans: Still Vital After All These Years of Automation. Hum. Factors 2008, 50, 511–520. [Google Scholar] [CrossRef] [PubMed]
- Toyota. Available online: https://www.toyota.com/concept-i/ (accessed on 25 December 2018).
- BMW. Available online: https://www.press.bmwgroup.com/global/article/detail/T0288983EN/bmw-group-at-the-ces-2019-in-las-vegas-virtual-drive-in-the-bmw-vision-inext?language=en (accessed on 25 December 2018).
- Nass, C.; Steuer, J.; Tauber, E.R. Computers Are Social Actors; ACM Press: New York, NY, USA, 1994; p. 204. [Google Scholar]
- Reeves, B.; Nass, C. The Media Equation - How People Treat Computers, Television and New Media Like Real People and Places; University of Chicago Press: Chicago, IL, USA, 1996. [Google Scholar]
- Nass, C.; Moon, Y. Machines and Mindlessness: Social Responses to Computers. J. Soc. Issues 2000, 56, 81–103. [Google Scholar] [CrossRef]
- Lee, K.M. Presence, Explicated. Commun. Theory 2004, 14, 27–50. [Google Scholar] [CrossRef]
- Johnson, D.; Gardner, J.; Wiles, J. Experience as a Moderator of the Media Equation: The Impact of Flattery and Praise. Int. J. Human-Comput. Stud. 2004, 61, 237–258. [Google Scholar] [CrossRef]
- Waytz, A.; Heafner, J.; Epley, N. The Mind in the Machine: Anthropomorphism Increases Trust in an Autonomous Vehicle. J. Exp. Soc. Psychol. 2014, 52, 113–117. [Google Scholar] [CrossRef]
- Lee, J.-G.; Kim, K.J.; Lee, S.; Shin, D. Can Autonomous Vehicles Be Safe and Trustworthy? Effects of Appearance and Autonomy of Unmanned Driving Systems. Int. J. Human-Comput. Interact. 2015, 31, 682–691. [Google Scholar] [CrossRef]
- Karatas, N.; Tamura, S.; Fushiki, M.; Okada, M. The Effects of Driving Agent Gaze Following Behaviors on Human-Autonomous Car Interaction. In Proceedings of the 10th International Conference on Social Robotics 2018, Qingdao, China, 28–30 November 2018; pp. 541–550. [Google Scholar]
- Brown, P.; Levinson, S.C. Politeness: Some Universals in Language Usage; Cambridge University Press: New York, NY, USA, 1987. [Google Scholar]
- Miller, C.A. Human-Computer Etiquette: Managing Expectations with Intentional Agents. Commun. ACM 2004, 47, 31–34. [Google Scholar]
- Nass, C. Etiquette Equality: Exhibitions and Expectations of Computer Politeness. Commun. ACM 2004, 47, 35–37. [Google Scholar] [CrossRef]
- Parasuraman, R.; Miller, C.A. Trust and Etiquette in High-Criticality Automated Systems. Commun. ACM 2004, 47, 51–55. [Google Scholar] [CrossRef]
- Whitworth, B. Polite Computing. Behav. Inf. Tech. 2005, 24, 353–363. [Google Scholar] [CrossRef]
- Wang, N.; Johnson, W.L.; Mayer, R.E.; Rizzo, P.; Shaw, E.; Collins, H. The Politeness Effect: Pedagogical Agents and Learning Outcomes. Int. J. Human-Comput. Stud. 2008, 66, 98–112. [Google Scholar] [CrossRef]
- Hayes, C.C.; Miller, C.A. Human-Computer Etiquette: Cultural Expectations and the Design Implications They Place on Computers and Technology; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- Dorneich, M.C.; Ververs, P.M.; Mathan, S.; Whitlow, S.; Hayes, C.C. Considering Etiquette in the Design of an Adaptive System. J. Cogn. Eng. Decision Mak. 2012, 6, 243–265. [Google Scholar] [CrossRef] [Green Version]
- Torrey, C.; Fussell, S.R.; Kiesler, S. How a Robot Should Give Advice; IEEE: Piscataway, NJ, USA, 2013; pp. 275–282. [Google Scholar]
- Amazon. Available online: https://developer.amazon.com/designing-for-voice/what-alexa-says/#be-brief (accessed on 25 December 2018).
- Kellermann, K.; Shea, B.C. Threats, Suggestions, Hints and Promises: Gaining Compliance Efficiently and Politely. Commun. Q. 1996, 44, 145–165. [Google Scholar] [CrossRef]
- LIM, T.-S.; BOWERS, J.W. Facework Solidarity, Approbation and Tact. Hum. Commun. Res. 1991, 17, 415–450. [Google Scholar] [CrossRef]
- Danescu-Niculescu-Mizil, C.; Sudhof, M.; Jurafsky, D.; Leskovec, J.; Potts, C. A Computational Approach to Politeness with Application to Social Factors. arXiv, 2013; arXiv:1306.6078. [Google Scholar]
- Beller, J.; Heesen, M.; Vollrath, M. Improving the Driver–Automation Interaction. Hum. Factors 2013, 55, 1130–1141. [Google Scholar] [CrossRef] [PubMed]
- The Seoul Research Data Service. Available online: http://data.seoul.go.kr/dataService/ (accessed on 28 January 2019).




| DVs | Speech Strategy in Normal Events | Speech Strategy in Failure Events | Interaction | ||||
|---|---|---|---|---|---|---|---|
| Plain | Polite | Plain | Polite | ||||
| Mean (SD) | Mean (SD) | F-Ratio (ηp2) | Mean (SD) | Mean (SD) | F-Ratio (ηp2) | F-Ratio (ηp2) | |
| Openness | 6.50 (1.77) | 6.90 (1.62) | 0.85 (0.02) | 7.32 (1.87) | 6.08 (1.25) | 8.32 ** (0.14) | 0.02 (0.00) |
| Social Presence | 6.96 (1.51) | 8.06 (1.08) | 9.65 ** (0.16) | 7.37 (1.47) | 7.65 (1.37) | 0.63 (0.01) | 0.01 (0.00) |
| Politeness | 7.81 (1.74) | 8.64 (1.22) | 4.42 * (0.08) | 8.16 (1.77) | 8.29 (1.32) | 0.11 (.00) | 3.33 (0.06) |
| Attractiveness | 7.42 (1.57) | 7.76 (1.62) | 0.69 (0.01) | 7.95 (1.61) | 7.23 (1.51) | 3.18 (0.06) | 4.88 * (0.09) |
| Satisfaction | 6.96 (1.47) | 7.90 (1.60) | 5.42 * (0.09) | 7.70 (1.54) | 7.15 (1.63) | 1.84 (0.03) | 1.96 (0.04) |
| Ease of Use | 7.93 (0.97) | 7.66 (1.77) | 0.63 (0.01) | 8.16 (1.09) | 7.43 (1.63) | 4.25 * (0.08) | 7.56 * (0.13) |
| Use Intention | 7.46 (1.60) | 8.27 (1.11) | 4.66 * (0.08) | 7.86 (1.56) | 7.87 (1.30) | 0.00 (0.00) | 0.63 (0.01) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.-G.; Lee, K.M.; Ryu, S.-H. Vehicle Politeness in Driving Situations. Future Internet 2019, 11, 48. https://doi.org/10.3390/fi11020048
Lee J-G, Lee KM, Ryu S-H. Vehicle Politeness in Driving Situations. Future Internet. 2019; 11(2):48. https://doi.org/10.3390/fi11020048
Chicago/Turabian StyleLee, Jae-Gil, Kwan Min Lee, and Seoung-Ho Ryu. 2019. "Vehicle Politeness in Driving Situations" Future Internet 11, no. 2: 48. https://doi.org/10.3390/fi11020048
APA StyleLee, J. -G., Lee, K. M., & Ryu, S. -H. (2019). Vehicle Politeness in Driving Situations. Future Internet, 11(2), 48. https://doi.org/10.3390/fi11020048