
Implementation of Parallel Cascade Identification at Various Phases for Integrated Navigation System

 ,
,  ,
, 
 and
and 
Abstract
:1. Introduction
- Input/output data measurement with appropriate sampling procedures either in the time domain or in the frequency domain.
- A set of candidate models and to choose a suitable model structure.
- An estimation method for minimization of fit between model (predicted) output and measured output.
2. Overview of Navigation Systems
3. Problem Statement
- A review of the PCI algorithm, a non-linear system identification technique with the details of different implementation steps, is discussed.
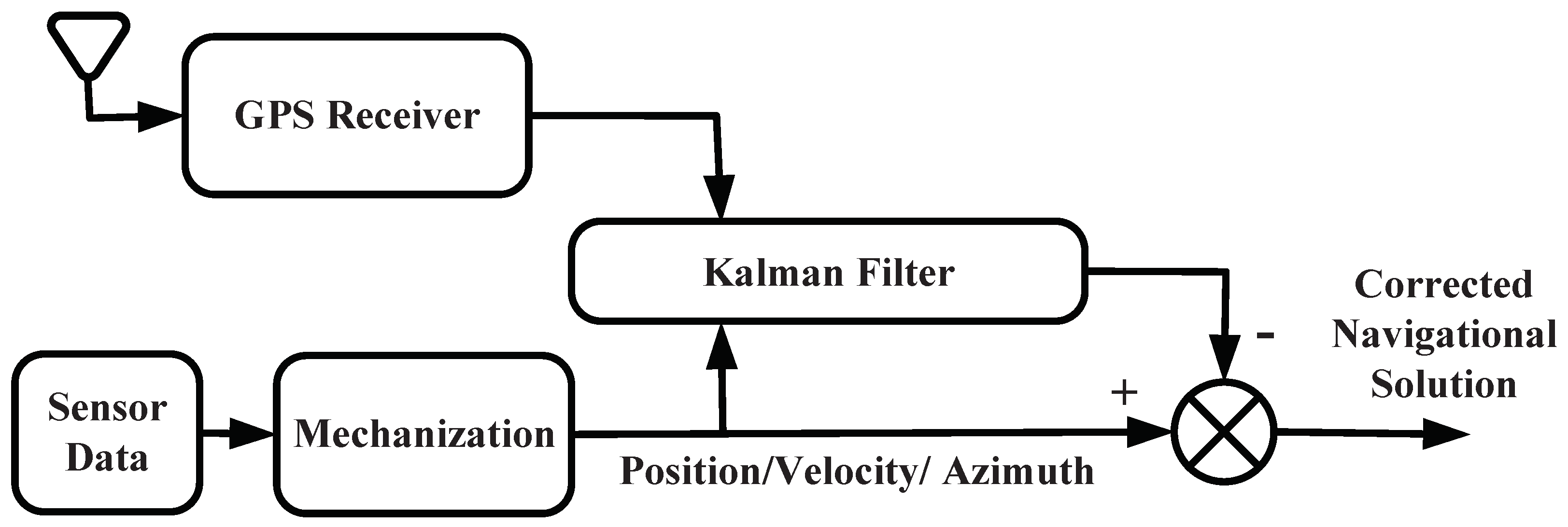
- The research approach in this paper relies on reduced inertial sensor systems (RISS), which limits the reliance on MEMS-based gyroscopes to avoid their high levels of noise and drift rates. The RISS incorporating single-axis gyroscope, vehicle odometer, and accelerometers will be considered for the integration with GNSS in one of two schemes:
- (a)
- Loosely coupled where GNSS position and velocity are used for the integration.
- (b)
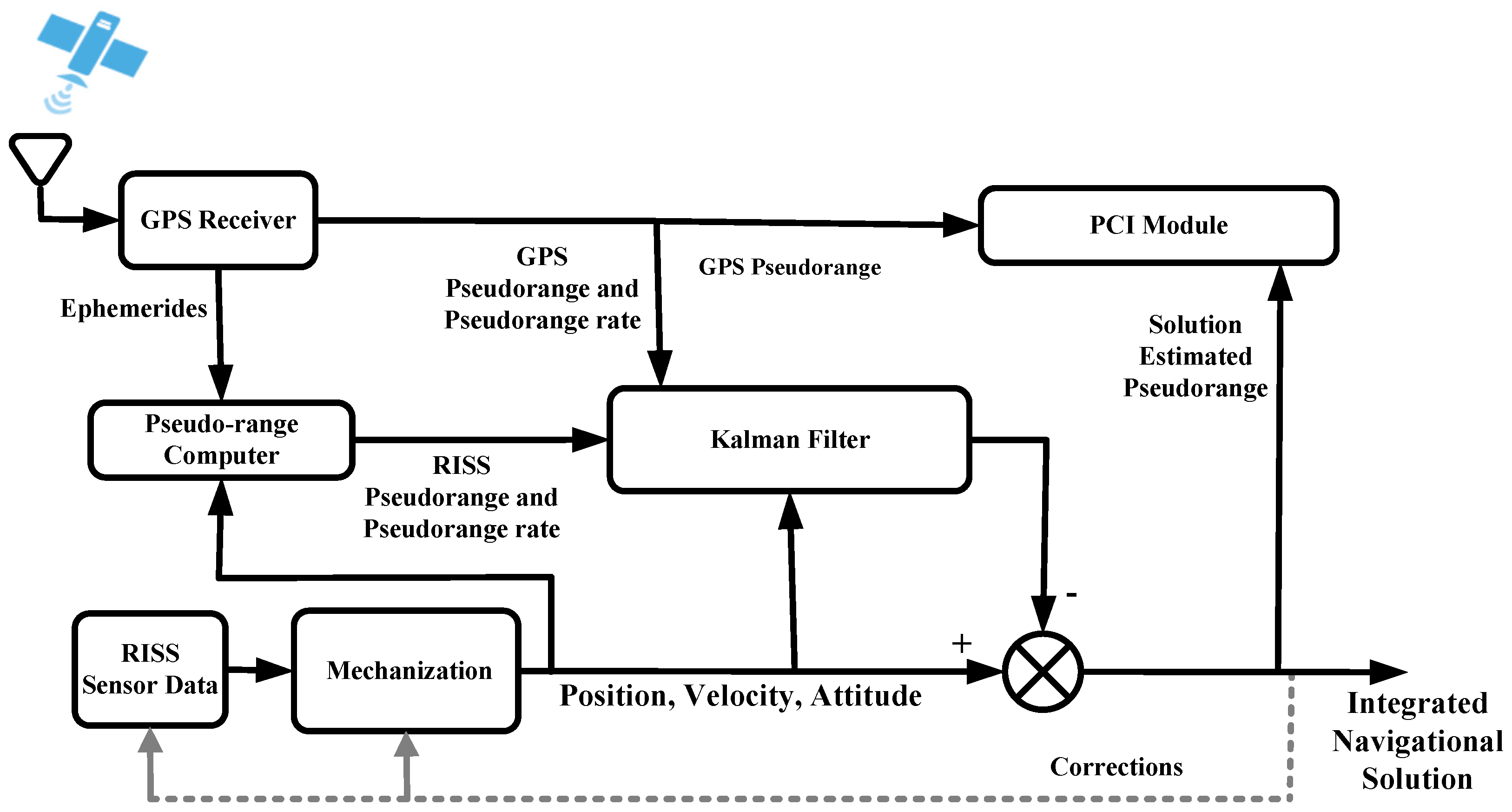
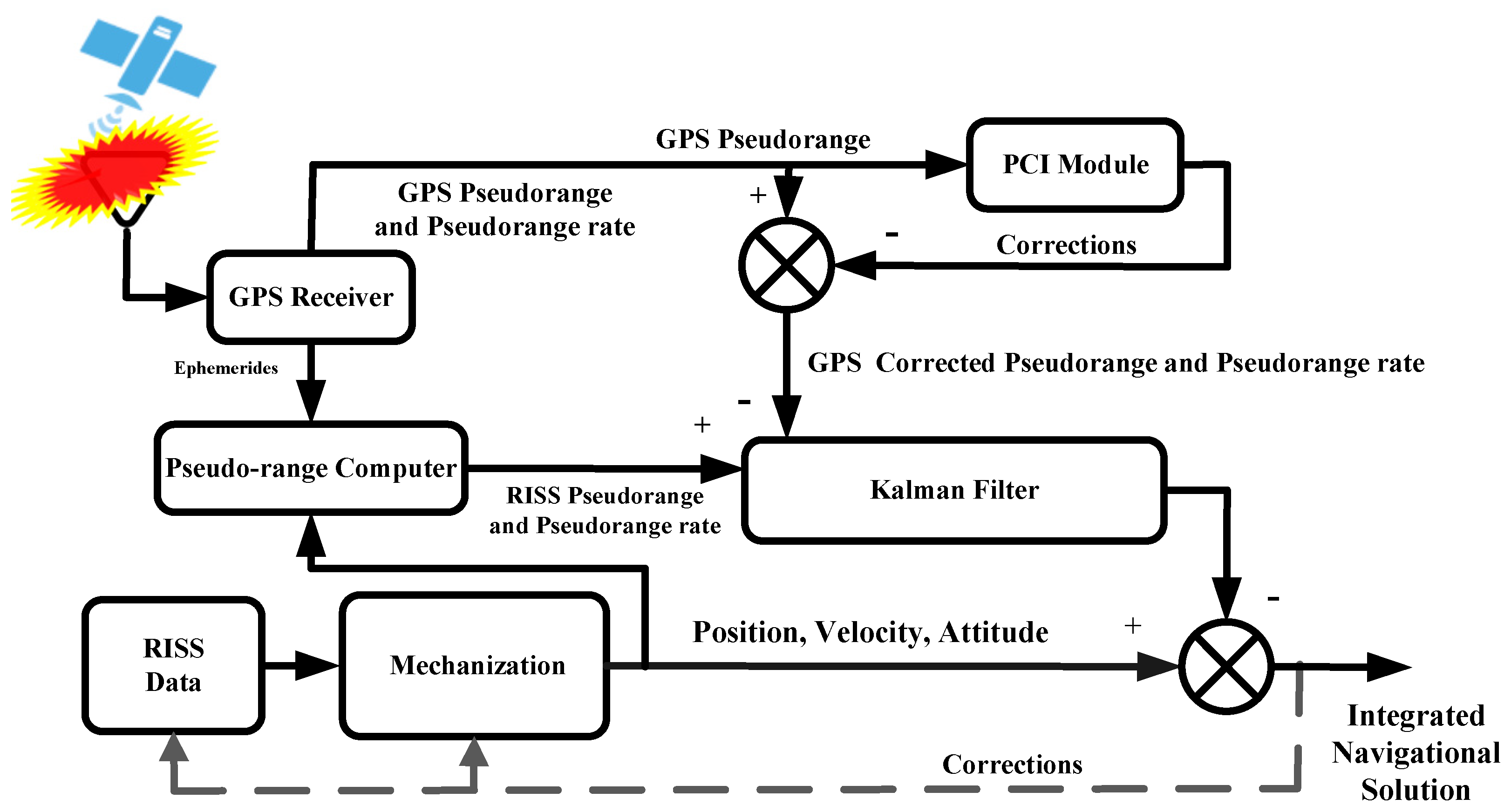
- Tightly coupled where GNSS pseudorange and pseudorange rates are utilized.
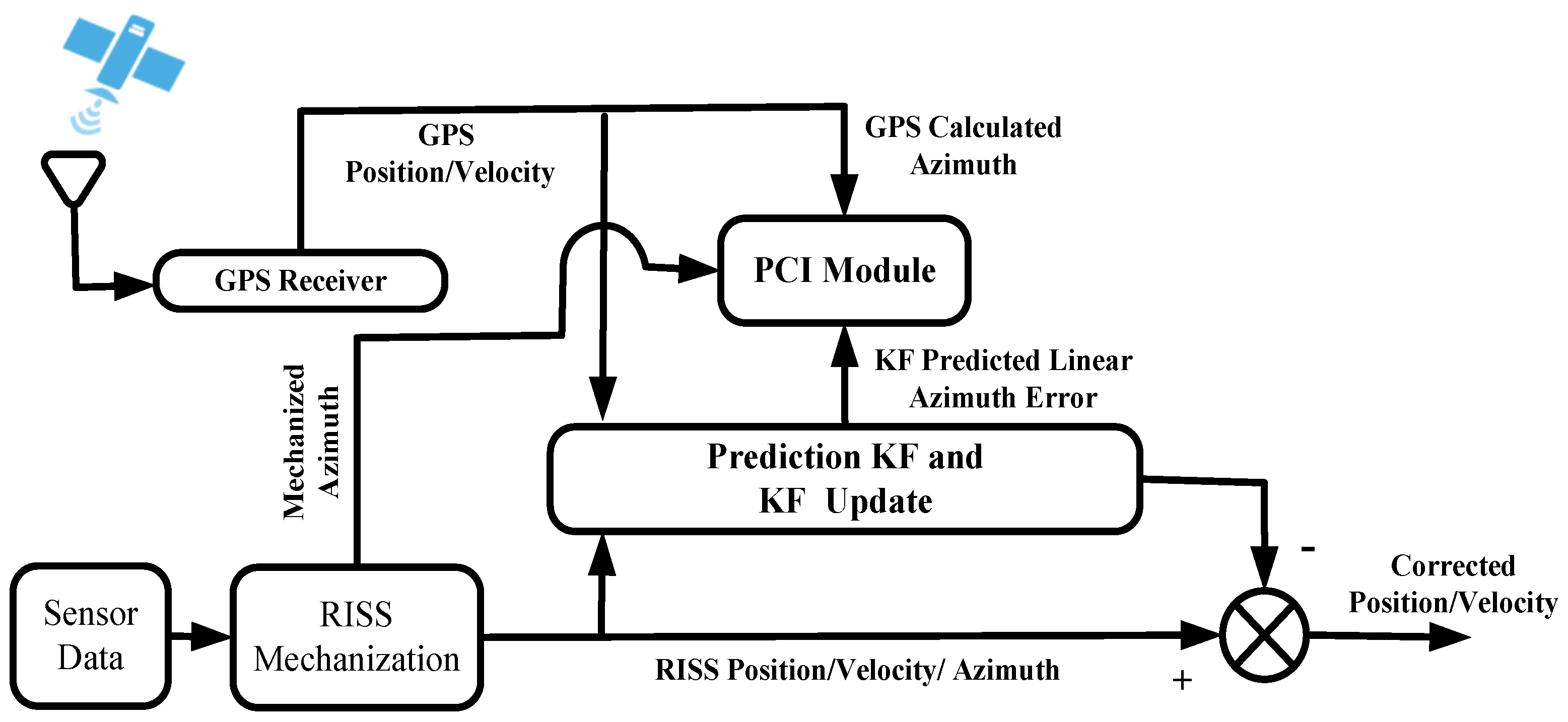
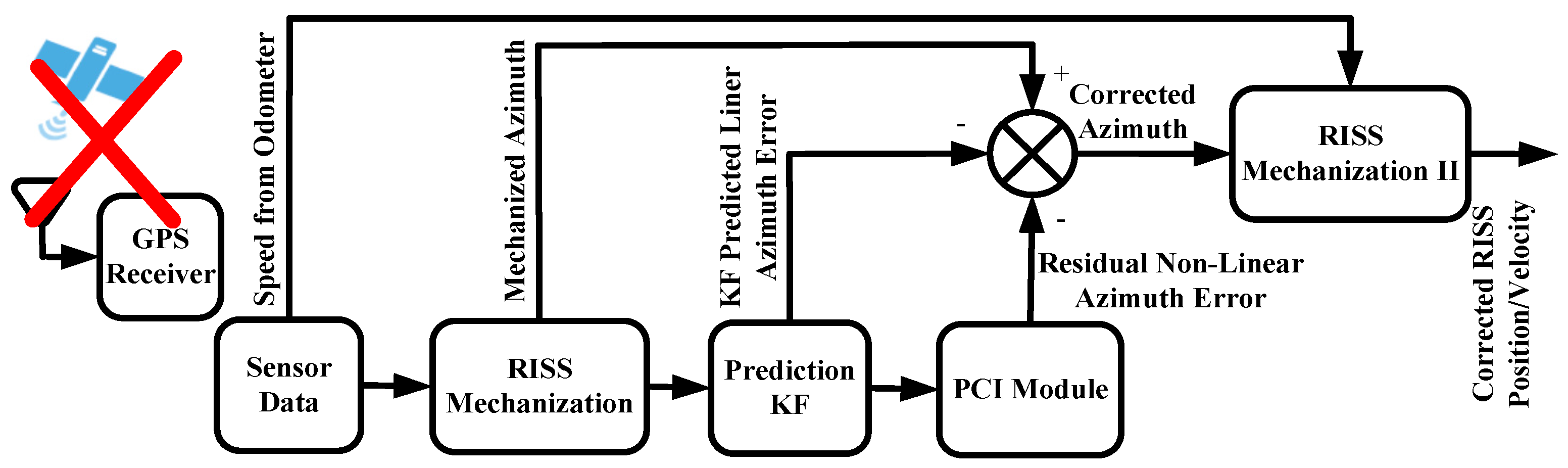
- In the first scenario, PCI is employed to enhance the performance of KF by modeling azimuth errors for the RISS/GNSS loosely coupled integration scheme. The azimuth non-linear error model is identified online using PCI, and the corrected azimuth is sent to the KF-based RISS/GNSS integrated module to improve the overall navigation accuracy.
- Then, PCI is utilized for the modeling of the residual GNSS pseudorange correlated errors. This paper provides a brief review to augment a PCI-based model of GNSS pseudorange correlated errors with a tightly coupled KF, to integrate low-cost MEMS-based RISS and GNSS observations.
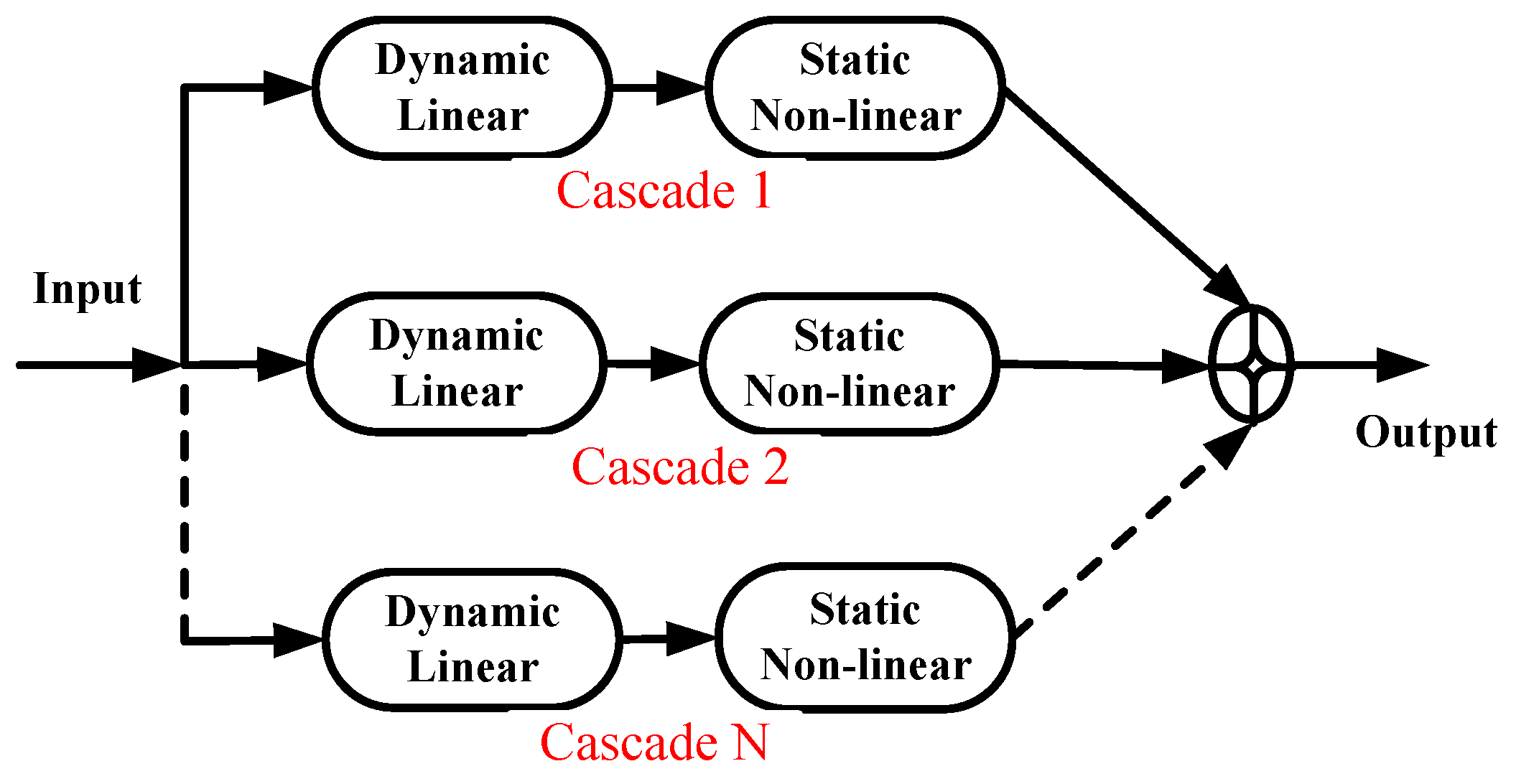
4. Parallel Cascade Identification
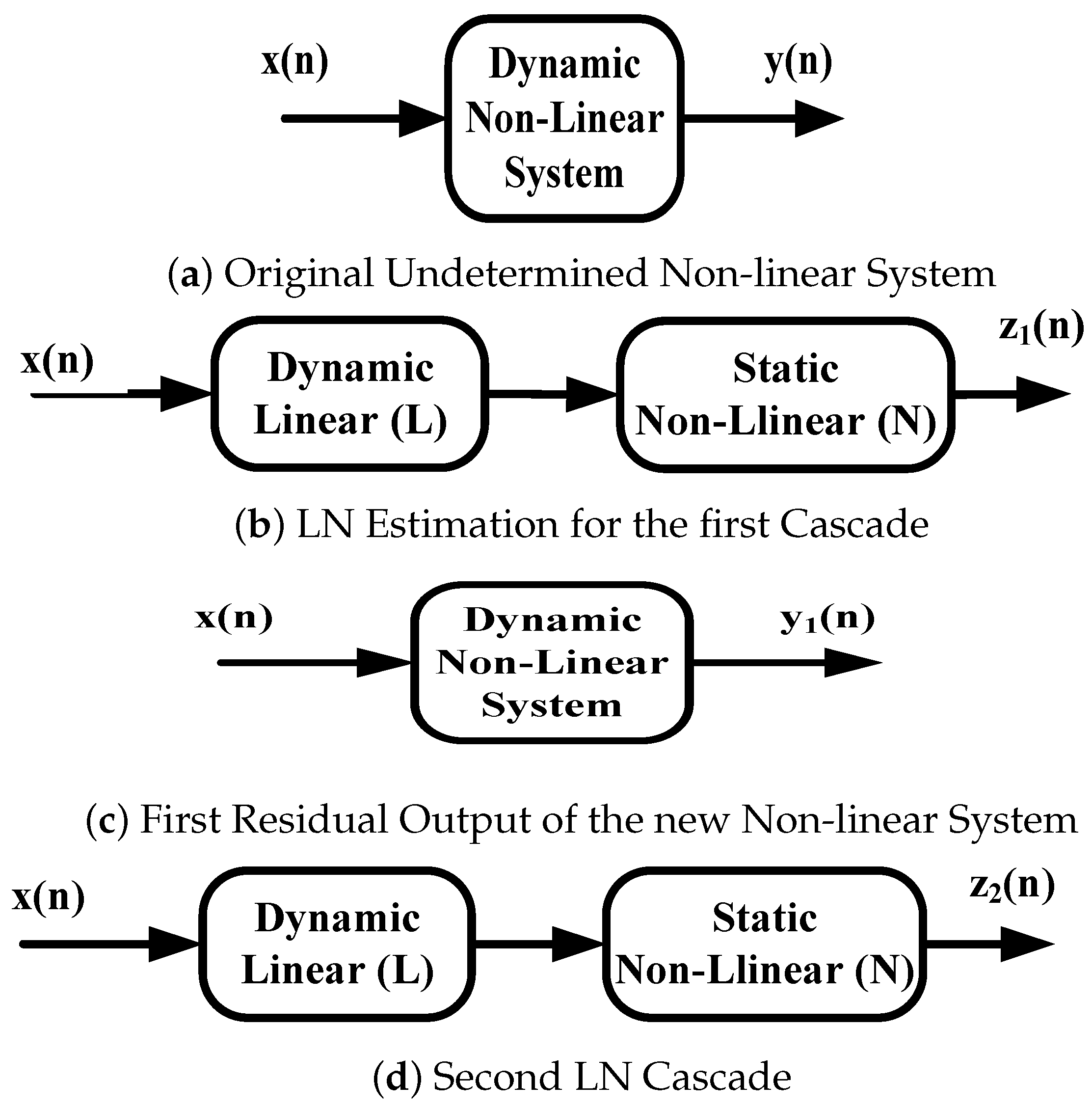
- The first cascade output of the non-linear dynamic system is , as shown in Figure 4b, and it is estimated by a cascade of a dynamic linear followed by a static non-linear element.
- Then, compute the first residual as shown in Figure 4c.
- Figure 4d shows the estimation of the new non-linear system having input and output by a cascade of followed by .
- Compute the second residual.
- And so on …Let be the residual after fitting the k-th cascade, so . Let be the output of the k-th cascade, so
Details of the PCI Algorithm
- Impulse response will be input residual cross-correlation:A portion of second order cross-correlations of input and residual is used; thus, the impulse response will be as follows:where is the Kronecker delta function, the sign is chosen at random, A is chosen at random from , and c is chosen such that as , e.g., (here, the over-bar means the finite-time average from to as in the expression for immediately above).
- A portion of the third order input residual cross-correlation will be used; thus, the impulse response will be as follows:
- We can use this expression up until the “n” order cross-correlation using the following:Nevertheless, in practice, cross-correlations up to the third order are typically enough. The output of the linear element calculated by convolution summation is as follows:Here, the linear element’s output depends on input values , linear elements have the memory length of , and is the impulse response of the linear element at beginning the k-th cascade.To obtain the static non-linear element for the current cascade by polynomial fitting, the following steps are followed. First is calculated. Let it equal M, and then the impulse response of the dynamic linear element is adjusted to be to ensure that .A polynomial (static non-linearity) is best fit to minimize the mean square error (MSE) of the approximation of the residual. To fit the static non-linearity, the coefficient aids are found to minimize.As noted, the over-bar here means a finite-time average. Minimizing with respect to each of the polynomial coefficients leads to equations in unknowns “”.It is important to know whether it is suitable to add the current cascade to the built model or not. The new cascades are to minimize the mean-square error such as to drive the cross-correlations of the input with the residual to zero [28,30] and are given by the following equation:where denotes the mean square of the candidate cascade’s output, and denotes the mean square of the current residual, i.e., the residual remaining from the cascades already present in the model.The following are four stopping conditions of building a parallel cascade for the PCI algorithm [30].
- When a certain number of cascades are added;
- When a certain number of cascades are analyzed (whether they are included or rejected);
- When MSE is adequately insignificant;
- When no residual candidate cascade can reduce the MSE considerably.
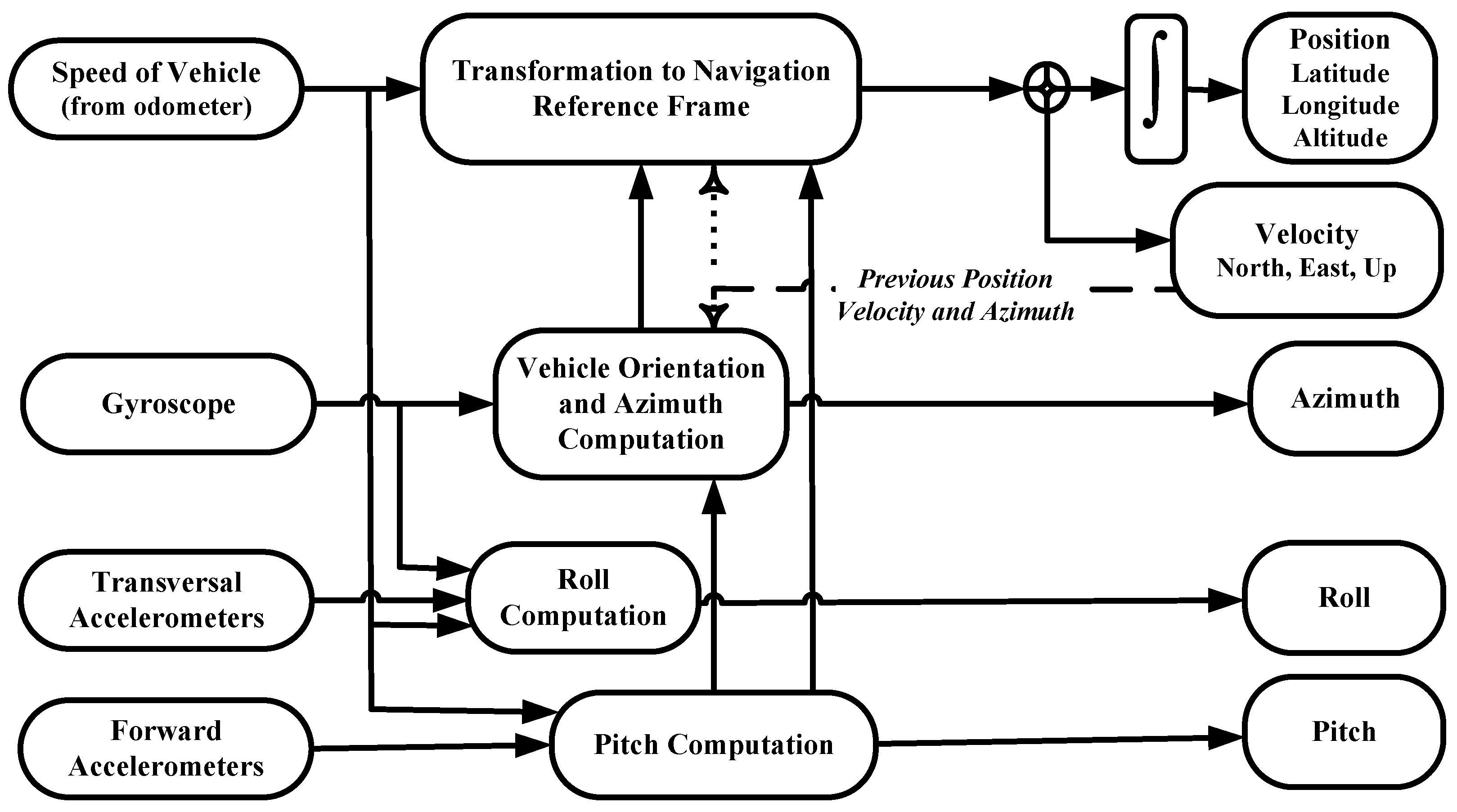
5. The 2D Reduced Inertial Sensor System
6. The 3D Reduced Inertial Sensor System
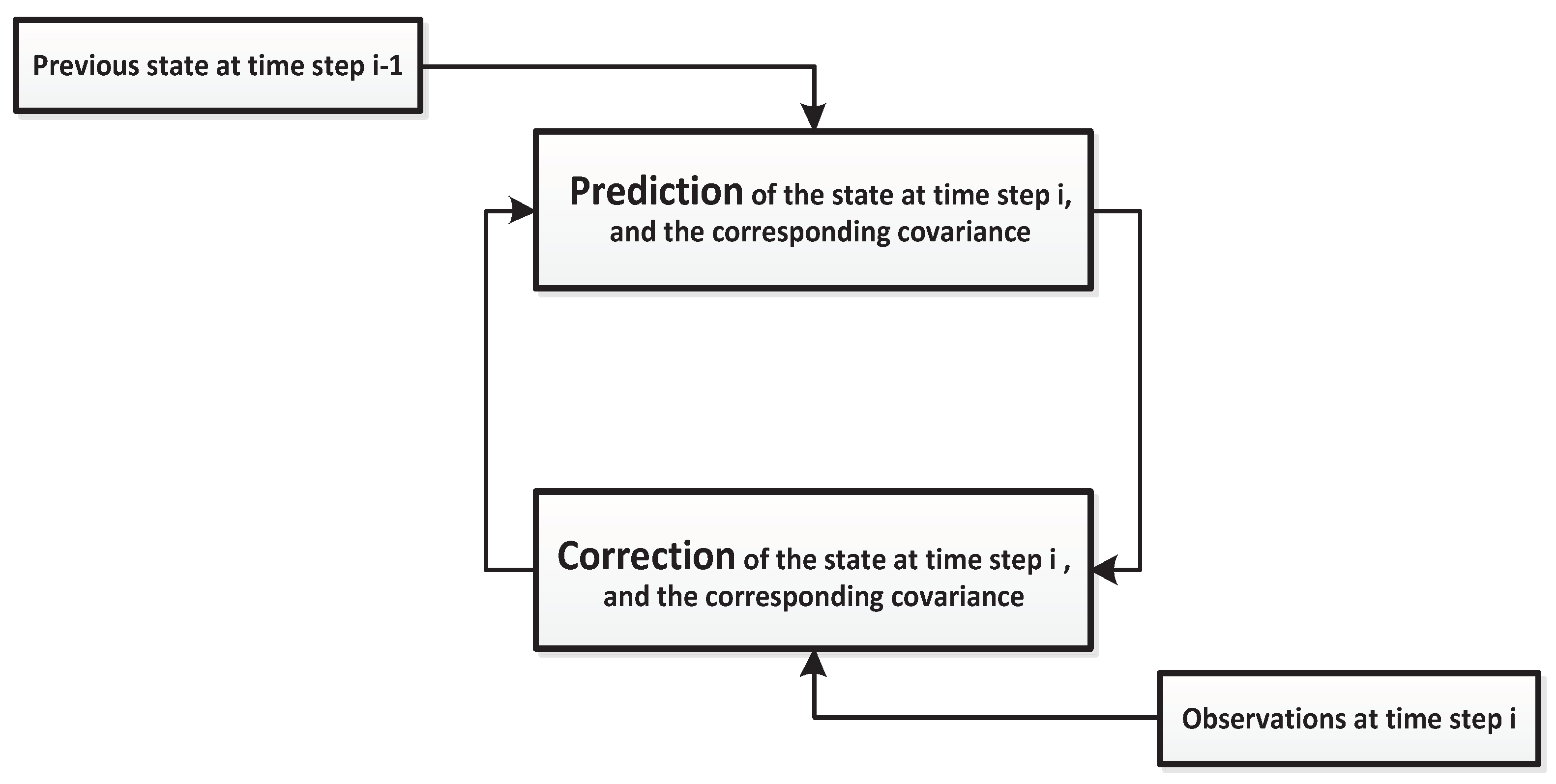
7. Kalman Filter
8. PCI for Modeling Azimuth Errors
9. PCI for Enhancing KF Based Tightly-Coupled Navigation Solution
10. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zadeh, L.A. From Circuit Theory to System Theory. Proc. IRE 1962, 50, 856–865. [Google Scholar] [CrossRef]
- Astrom, K.J.; Eykhoff, P. System identification—A Survey. Automatica 1971, 7, 123–162. [Google Scholar] [CrossRef] [Green Version]
- Box, G.E.P.; Jenkins, G.M.; Wisconsin University Madison Department of Statistics. Time series analysis: Forecasting and control. In Holden-Day Series in Time Series Analysis and Digital Processing; Holden-Day: Madison, WI, USA, 1970. [Google Scholar]
- Astrom, K.J. Introduction to Stochastic Control Theory; Academic Press: New York, NY, USA, 1970; pp. 1–299. [Google Scholar]
- Eykhoff, P. System Identification and State Estimation; Wiley New York: New York, NY, USA, 1974; Volume 14. [Google Scholar]
- Ljung, L. System Identification: Theory for the User; American Cancer Society: Atlanta, GA, USA, 1987; pp. 1–19. [Google Scholar] [CrossRef]
- Soderstrom, T.; Stoica, P. System Identification; Prentice-Hall International: Hoboken, NJ, USA, 1989. [Google Scholar]
- Pintelon, R.; Schoukens, J. System Identification: A Frequency Domain Approach; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Iqbal, U.; Noureldin, A.; Georgy, J.; Korenberg, M.J. Application of System Identification Techniques for Integrated Navigation. In Proceedings of the 2020 International Conference on Communications, Signal Processing, and their Applications (ICCSPA), Sharjah, United Arab Emirates, 16–18 March 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Skog, I.; Handel, P. In-car positioning and navigation technologies—A survey. IEEE Trans. Intell. Transp. Syst. 2009, 10, 4–21. [Google Scholar] [CrossRef]
- Obradovic, D.; Lenz, H.; Schupfner, M. Fusion of map and sensor data in a modern car navigation system. J. VLSI Signal Process. Syst. Signal Image Video Technol. 2006, 45, 111–122. [Google Scholar] [CrossRef]
- Hein, G.W. From GPS and GLONASS via EGNOS to Galileo-Positioning and Navigation in the Third Millennium. GPS Solut. 2000, 3, 39–47. [Google Scholar] [CrossRef]
- Krasuski, K.; Wierzbicki, D.; Bakuła, M. Improvement of UAV Positioning Performance Based on EGNOS+SDCM Solution. Remote Sens. 2021, 13, 2597. [Google Scholar] [CrossRef]
- Naus, K.; Szymak, P.; Piskur, P.; Niedziela, M.; Nowak, A. Methodology for the Correction of the Spatial Orientation Angles of the Unmanned Aerial Vehicle Using Real Time GNSS, a Shoreline Image and an Electronic Navigational Chart. Energies 2021, 14, 2810. [Google Scholar] [CrossRef]
- Tamazin, M.; Korenberg, M.J.; Elghamrawy, H.; Noureldin, A. GPS Swept Anti-Jamming Technique Based on Fast Orthogonal Search (FOS). Sensors 2021, 21, 3706. [Google Scholar] [CrossRef] [PubMed]
- Azouz, A.; Abosekeen, A.; Nassar, S.; Hanafy, M. Design and Implementation of an Enhanced Matched Filter for Sidelobe Reduction of Pulsed Linear Frequency Modulation Radar. Sensors 2021, 21, 3835. [Google Scholar] [CrossRef] [PubMed]
- Abosekeen, A.; Noureldin, A.; Karamat, T.; Korenberg, M.J. Comparative Analysis of Magnetic-Based RISS using Different MEMS-Based Sensors. In Proceedings of the the 30th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2017); Raquet, J., Kassas, Z., Eds.; Inistitute of Navigation: Portland, OR, USA, 2017; pp. 2944–2959. [Google Scholar] [CrossRef]
- Abosekeen, A.; Noureldin, A.; Korenberg, M.J. Utilizing the ACC-FMCW radar for land vehicles navigation. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 124–132. [Google Scholar] [CrossRef]
- Abosekeen, A.; Noureldin, A.; Korenberg, M.J. Improving the RISS/GNSS Land-Vehicles Integrated Navigation System Using Magnetic Azimuth Updates. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1250–1263. [Google Scholar] [CrossRef]
- Iqbal, U.; Abosekeen, A.; Noureldin, A.; Korenberg, M.J. An Analysis to Enhance the Reliability of an Integrated Navigation System at Multiple Stages by using FOS. In Proceedings of the 33rd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2020), St. Louis, MO, USA, 21–25 September 2020; pp. 326–340. [Google Scholar] [CrossRef]
- Abosekeen, A.; Iqbal, U.; Noureldin, A. Enhanced Land Vehicles Navigation by Fusing Automotive Radar and Speedometer Data. In Proceedings of the 33rd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2020), St. Louis, MO, USA, 21–25 September 2020; pp. 2206–2219. [Google Scholar] [CrossRef]
- Rashed, M.A.; Abosekeen, A.; Ragab, H.; Noureldin, A.; Korenberg, M.J. Leveraging FMCW-radar for autonomous positioning systems: Methodology and application in downtown Toronto. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of the Institute of Navigation, ION GNSS+ 2019, Miami, FL, USA, 16–20 September 2019; pp. 2659–2669. [Google Scholar] [CrossRef]
- Iqbal, U.; Okou, A.F.; Noureldin, A. An Integrated Reduced Inertial Sensor System-RISS/GPS for Land Vehicle. In Proceedings of the IEEE/ION PLANS 2008, Monterey, CA, USA, 5–8 May 2008; pp. 1014–1021. [Google Scholar]
- Iqbal, U.; Noureldin, A. Integrated Reduced Inertial Sensor System/GPS for Vehicle Navigation; VDM: Saarbrucken, Germany, 2009. [Google Scholar]
- Iqbal, U.; Georgy, J.; Abdelfatah, W.F.; Korenberg, M.J.; Noureldin, A. Pseudoranges Error Correction in Partial GPS Outages for A Nonlinear tightly Coupled Integrated System. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1510–1525. [Google Scholar] [CrossRef]
- Iqbal, U.; Georgy, J.; Korenberg, M.J.; Noureldin, A. Modeling Residual Errors of GPS Pseudoranges by Augmenting Kalman Filter With PCI for Tightly-Coupled RISS/GPS Integration. In Proceedings of the 23rd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2010), Portland, OR, USA, 21–24 September 2010; pp. 2271–2279. [Google Scholar]
- Iqbal, U.; Georgy, J.; Abdelfatah, W.F.; Korenberg, M.; Noureldin, A. Enhancing Kalman Filtering-Based Tightly Coupled Navigation Solution Through Remedial Estimates for Pseudorange Measurements Using Parallel Cascade Identification. Instrum. Sci. Technol. 2012, 40, 530–566. [Google Scholar] [CrossRef]
- Korenberg, M.J. Parallel Cascade Identification and Kernel Estimation for Nonlinear Systems. Ann. Biomed. Eng. 1991, 19, 429–455. [Google Scholar] [CrossRef] [PubMed]
- Palm, G. On Representation and Approximation of Nonlinear Systems. Biol. Cybern. 1979, 34, 49–52. [Google Scholar] [CrossRef]
- Korenberg, M. Statistical identification of parallel cascades of linear and nonlinear systems. IFAC Proc. Vol. 1982, 15, 669–674. [Google Scholar] [CrossRef]
- Iqbal, U.; Karamat, T.B.; Okou, A.F.; Noureldin, A. Experimental Results on An Integrated GPS and Multisensor System for Land Vehicle Positioning. Int. J. Navig. Obs. 2009, 2009, 765010. [Google Scholar] [CrossRef] [Green Version]
- Gelb, A.; Joseph, A.F.; Raymond, A.N.; Charles, F.P.; Arthur, A.S. Applied Optimal Estimation; M.I.T Press: Cambridge, MA, USA, 1974. [Google Scholar]
- Minkler, G.; Minkler, J. Theory and Applications of Kalman Filtering; Magellan Book Company: Palm Bay, FL, USA, 1993. [Google Scholar]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation: Theory Algorithms and Software; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Noureldin, A.; Karamat, T.B.; Georgy, J. Fundamentals of INS, GPS and Their Integration; Springer: Berlin/Heidelberg, Germany, 2013; Volume 1, p. 313. [Google Scholar]
- Abosekeen, A.; Iqbal, U.; Noureldin, A. Improved Navigation Through GNSS Outages: Fusing Automotive Radar and OBD-II Speed Measurements with Fuzzy Logic. GPS World 2021, 32, 36–41. [Google Scholar]
- Mahmoud, A.; Noureldin, A.; Hassanein, H.S. Integrated Positioning for Connected Vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 21, 397–409. [Google Scholar] [CrossRef]
- Abosekeen, A.; Karamat, T.B.; Noureldin, A.; Korenberg, M.J. Adaptive cruise control radar-based positioning in GNSS challenging environment. IET Radar Sonar Navig. 2019, 13, 1666–1677. [Google Scholar] [CrossRef]
- Abosekeen, A.; Iqbal, U.; Noureldin, A.; Korenberg, M.J. A Novel Multi-Level Integrated Navigation System for Challenging GNSS Environments. IEEE Trans. Intell. Transp. Syst. 2020, 1–15. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IMUs | ADI (100 HZ) | HG1700 IMU (100 HZ) | IMU-CPT (100 HZ) |
|---|---|---|---|
| Size (cm3) | 7.62 × 9.53 × 3.2 | 19.3 × 16.7 × 100 | 15.2 × 16.8× 8.9 |
| Weight | 0.59 Kg | 3.4 Kg | 2.28 Kg |
| Max data rate | 100 Hz | 100 Hz | 100 Hz |
| Start-up time | <1 s | <5 s | <5 s |
| Accelerometer | |||
| Range | ±5 g | ±50 g | ±10 g |
| Bias instability | ±6 mg | ±1 mg | ±0.75 mg |
| Scale factor | <0.2%, 1 | 300 ppm, 1 | 300 ppm, 1 |
| Gyroscope | |||
| Range | ±150 /s | ±1000 /s | ±375 /s |
| Bias instability | <±0.5 /s | 1.0 /h | ±1.0 /h |
| Scale factor | <0.1 %, 1 | 150 ppm, 1 | 1500 ppm, 1 |
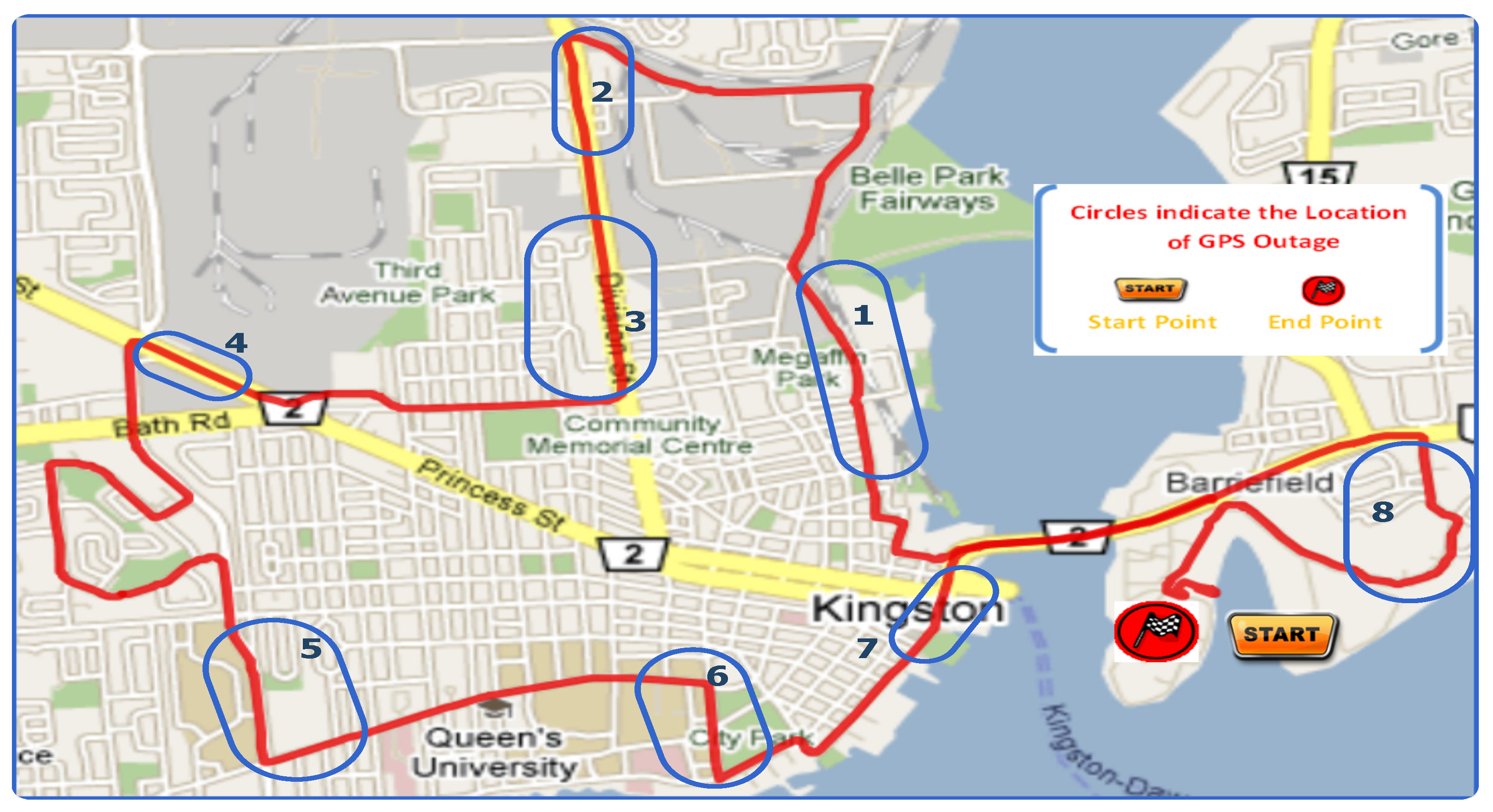
| Outage No. | Outage Dur. (s) | RMS Error in Position (Meter) | |
|---|---|---|---|
| KF | KF-PCI | ||
| 1 | 120 | 20.3 | 11.1 |
| 2 | 120 | 10.7 | 6.3 |
| 3 | 120 | 17.6 | 8.8 |
| 4 | 120 | 17.8 | 7.9 |
| 5 | 120 | 35.9 | 10.9 |
| 6 | 120 | 84.2 | 8.5 |
| 7 | 120 | 62.9 | 16.5 |
| 8 | 120 | 91.4 | 7.9 |
| Average | 42.6 | 9.7 | |
| The Number of Visible Satellites | Outage Dur. (s) | RMS Error in Position (Meter) | |
|---|---|---|---|
| KF | KF-PCI | ||
| 3 | 60 | 7.5 | 4.6 |
| 2 | 60 | 10.4 | 8.7 |
| 1 | 60 | 15.8 | 15.7 |
| 0 | 60 | 15.6 | 15.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iqbal, U.; Abosekeen, A.; Georgy, J.; Umar, A.; Noureldin, A.; Korenberg, M.J. Implementation of Parallel Cascade Identification at Various Phases for Integrated Navigation System. Future Internet 2021, 13, 191. https://doi.org/10.3390/fi13080191
Iqbal U, Abosekeen A, Georgy J, Umar A, Noureldin A, Korenberg MJ. Implementation of Parallel Cascade Identification at Various Phases for Integrated Navigation System. Future Internet. 2021; 13(8):191. https://doi.org/10.3390/fi13080191
Chicago/Turabian StyleIqbal, Umar, Ashraf Abosekeen, Jacques Georgy, Areejah Umar, Aboelmagd Noureldin, and Michael J. Korenberg. 2021. "Implementation of Parallel Cascade Identification at Various Phases for Integrated Navigation System" Future Internet 13, no. 8: 191. https://doi.org/10.3390/fi13080191
APA StyleIqbal, U., Abosekeen, A., Georgy, J., Umar, A., Noureldin, A., & Korenberg, M. J. (2021). Implementation of Parallel Cascade Identification at Various Phases for Integrated Navigation System. Future Internet, 13(8), 191. https://doi.org/10.3390/fi13080191