1. Introduction
A surface-mounted permanent magnet (SPM) machine has many advantages, such as a simple structure, high efficiency, and low cost, and has been used in many auxiliary parts of electric vehicles. The performance of SPM machines has an important impact on the operation performance of electric vehicles.
To guarantee the smooth operation and decrease the noise of an electric vehicle, the cogging torque and electromagnetic torque ripple of the SPM machine need to be decreased. There are usually two methods to be adopted to decrease cogging torque and electromagnetic torque ripple. One of them is to reasonably design various inherent structural parameters of the machine, such as stator slot and rotor pole combination and pole arc coefficient. Another one is to adopt various kinds of auxiliary measures, such as skewing the stator slot [
1,
2], skewing the rotor pole [
3,
4], improving the PM shape [
5,
6], changing the magnetization pattern of the magnet [
7], and changing the geometry parameters of the stator teeth or slot [
8,
9]. All the above auxiliary measures can effectively make the torque ripple decrease, but these measures will largely increase manufacturing difficulty.
Auxiliary measures should play an auxiliary role on the basis of a good design scheme. Hence, how to achieve a good design scheme should be the first thing to be considered in the design process of the machine. The stator slot and rotor pole combination and the pole arc coefficient have a significant effect on the electromagnetic performance of the SPM machine. Thus, in the design process of the machine, the selection of the stator slot and rotor pole combination and the pole arc coefficient is a necessary and important step. Aiming at this problem, some researchers have researched stator slot and rotor pole combinations and pole arc coefficients in the design process of some kinds of PM machines. In Reference [
10], the stator slot and rotor pole combination principle of the flux-reversal PM machine is researched considering the magnetization mode of the PM and flux leakage. In Reference [
11], the stator slot and rotor pole combination principle of the flux-reversal PM machine adopting a consequent pole structure is researched. Reference [
12] researches effects of rotor pole number, stator slot number, and pole arc coefficient on loss, stress, and rotor temperature in order to guide the design for a high-speed PM machine. Reference [
13] researches effects of rotor pole number and stator slot number on electromagnetic performance to guide the design for a PM wind power generator. References [
14,
15,
16] research the stator slot and rotor pole combination in an SPM machine with concentrated winding. Reference [
17] researches tooth-coil winding in the PM AC servo machine with different pole number and slot number. Reference [
18] researches the effect of stator slot and rotor pole combination on electromagnetic noise in a machine with fractional slot concentrated winding. Reference [
19] researches the effect of stator slot and rotor pole ratio on electromagnetic and cogging torques of the electric vehicle traction machine. Reference [
20] researches the effect of stator slot and rotor pole combination on the EMF and inductance harmonics of a concentrated wound consequent pole PM machine. Reference [
21] researches the effect of stator slot and rotor pole combination on the flux weakening capability of the PM machine with fractional slot concentrated winding. Reference [
22] researches the selection of a stator slot and rotor pole combination in the design process of a PM machine for turrets with large diameters. References [
23,
24] research the effect of pole arc coefficient on the cogging torque in a surface-mounted PM machine. References [
25,
26] research the effect of pole arc coefficient on the magnetic field in a PM vernier machine and a PM linear synchronous machine, respectively. Both stator slot and rotor pole combination and pole arc coefficient are important geometry parameters in the design process of an SPM machine. Hence, it is necessary to research them simultaneously in the design process of the SPM machine.
Therefore, in this paper, a 750 W SPM machine is taken as an example to research the selection of the stator slot and rotor pole combination and the pole arc coefficient. This paper is prepared as follows: In
Section 2, SPM machines with different stator slot and rotor pole combinations are designed, respectively, according to winding coefficient, stator size, and electromagnetic performance requirements. On this basis, in
Section 3, the back EMF, cogging torque, electromagnetic torque, and loss and efficiency of SPM machines with different stator slot and rotor pole combinations are calculated and compared, respectively, to select better stator slot and rotor pole combinations. On this basis, in
Section 4, effects of pole arc coefficient on cogging torque and electromagnetic torque are researched. The research conclusions achieved by this paper will provide guidance for the design of an SPM machine.
2. Design Schemes of SPM Machines with Different Stator Slot and Rotor Pole Combinations
In this paper, a 750 W SPM machine is taken as an example to research the stator slot and rotor pole combination. In the design process for SPM machines, except for the geometry parameters in the stator slot and the rotor pole and the number of conductors per slot, other geometry parameters should be the same, and they are listed in
Table 1.
The winding coefficient is an important factor in selecting the stator slot and rotor pole combination of a machine. On one hand, it influences the distribution of the back-EMF waveform; on the other hand, it influences the magnitude of the back EMF and further influences the output torque capacity of the machine. Therefore, in the process of machine design, it is not suitable to select a stator slot and rotor pole combination with a too-small winding coefficient.
The winding coefficient is the product of short pitch coefficient, distribution coefficient, and skewing coefficient. In this paper, skewed slots are not adopted in machines, so the skewing coefficient is 1. Hence, the winding coefficient depends on the short pitch coefficient and the distribution coefficient in this paper. For the short pitch coefficient, the expression is the same in fractional slot and integral slot machines, as shown in Equation (1):
where
n is the harmonic order,
y is the winding pitch, and
τ is the pole pitch.
For the distribution coefficient, the expressions in fractional slot and integral slot machines are different. In the integral slot machine, the expression of the distribution coefficient is shown as follows:
where
q is the number of stator slots per pole per phase and
α is the slot pitch angle.
In the fractional slot machine, the number of stator slots per pole per phase can be calculated as follows:
where
Z is the number of stator slots,
m is the phase number, and
p is the pole pair number. For example, for a three-phase machine with 10 poles and 33 slots,
Z is equal to 33,
m is equal to 3, and
p is equal to 5. Correspondingly,
b is equal to 1,
c is equal to 1,
d is equal to 10, and
N is equal to 11.
In the fractional slot machine, the expression of the distribution coefficient is shown as follows:
When
d in Equation (3) is an even number, the expression of
αn is shown as follows:
When
d in Equation (3) is an odd number, the expression of
αn is shown as follows:
where
where
P is the smallest integer that makes
D an integer; when
d is an odd number, the pole pair numbers of harmonics are
v = 6
k ± 1 (
v = 1, 5, 7, 11, 13, …); correspondingly, the harmonic orders are
n =
v/
d. When
d is an even number, the pole pair numbers of harmonics are
v = 3
k ± 1 (
v = 1, 2, 4, 5, 7, …); correspondingly, the harmonic orders are
n = 2
v/
d.
The winding coefficient under an arbitrary stator slot and rotor pole combination can be calculated by Equations (1)–(6). The number of stator slots is selected by comprehensively considering the stator size and the winding coefficient. Because the outer diameter of the SPM machine is small, the selected slot number is limited to 33. In addition, the number of conductors per slot is designed to guarantee the output torque capacity of the SPM machine under different stator slot and rotor pole combinations.
When the number of rotor poles is 4, the number of stator slots is 6, 12, 15, 18, 21, 24, 27, 30, and 33 and the corresponding number of conductors per slot, the winding pitch, and the winding coefficient are shown in
Table 2.
Similarly, when the number of rotor poles is 8, the number of stator slots is 9, 12, 18, 21, 24, 27, 30, and 33, respectively. The corresponding number of conductors per slot, the winding pitch, and the winding coefficient are shown in
Table 3. In addition, when the number of stator slots is 15, the winding coefficient is only 0.7109, so this stator slot and rotor pole combination is not selected in the design process of the machine.
When the number of rotor poles is 10, the number of stator slots is 9, 12, 15, 21, 24, 27, 30, and 33. The corresponding number of conductors per slot, the winding pitch, and the winding coefficient are shown in
Table 4. When the number of stator slots is 18, the winding coefficient is only 0.7352, so this stator slot and rotor pole combination is not selected in the design process of the machine.
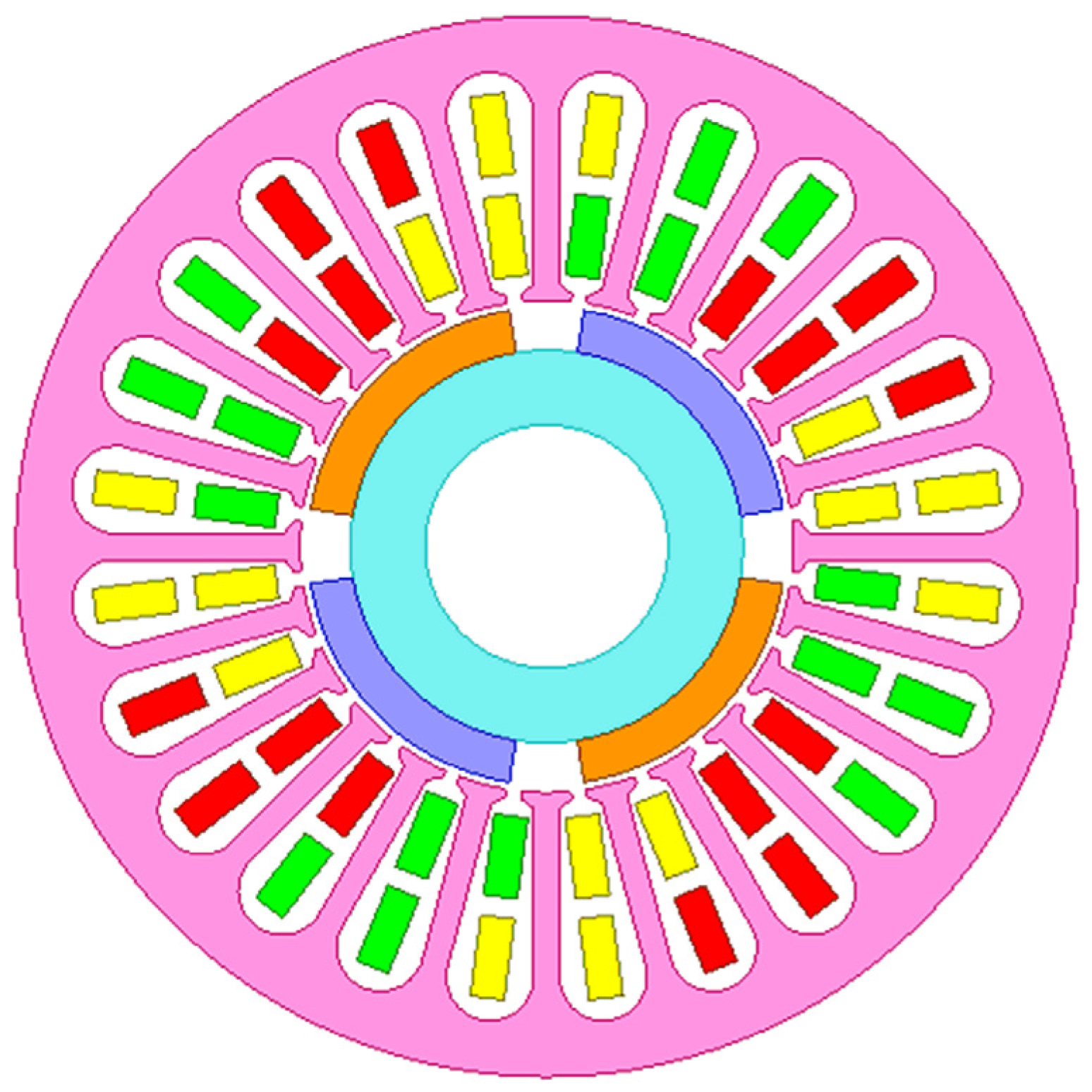
In addition, the slot types in the machines are all pear shaped and the values of slot opening width and height are the same, as shown in
Table 1. The structure of a 4-pole and 24-slot SPM machine is taken as an example to show the structure of the machine researched in this paper, shown in
Figure 1.
3. Effect of Stator Slot and Rotor Pole Combination
The machine design schemes corresponding to different stator slot and rotor pole combinations are given in the
Section 2. On this basis, the finite element (FE) simulation models of SPM machines are established by Ansys Maxwell. Correspondingly, back EMF, cogging torque, electromagnetic torque, and loss and efficiency are calculated and compared under different stator slot and rotor pole combinations in this section. The corresponding calculation results will provide guidance in the selection of a stator slot and rotor pole combination.
3.1. Back EMF
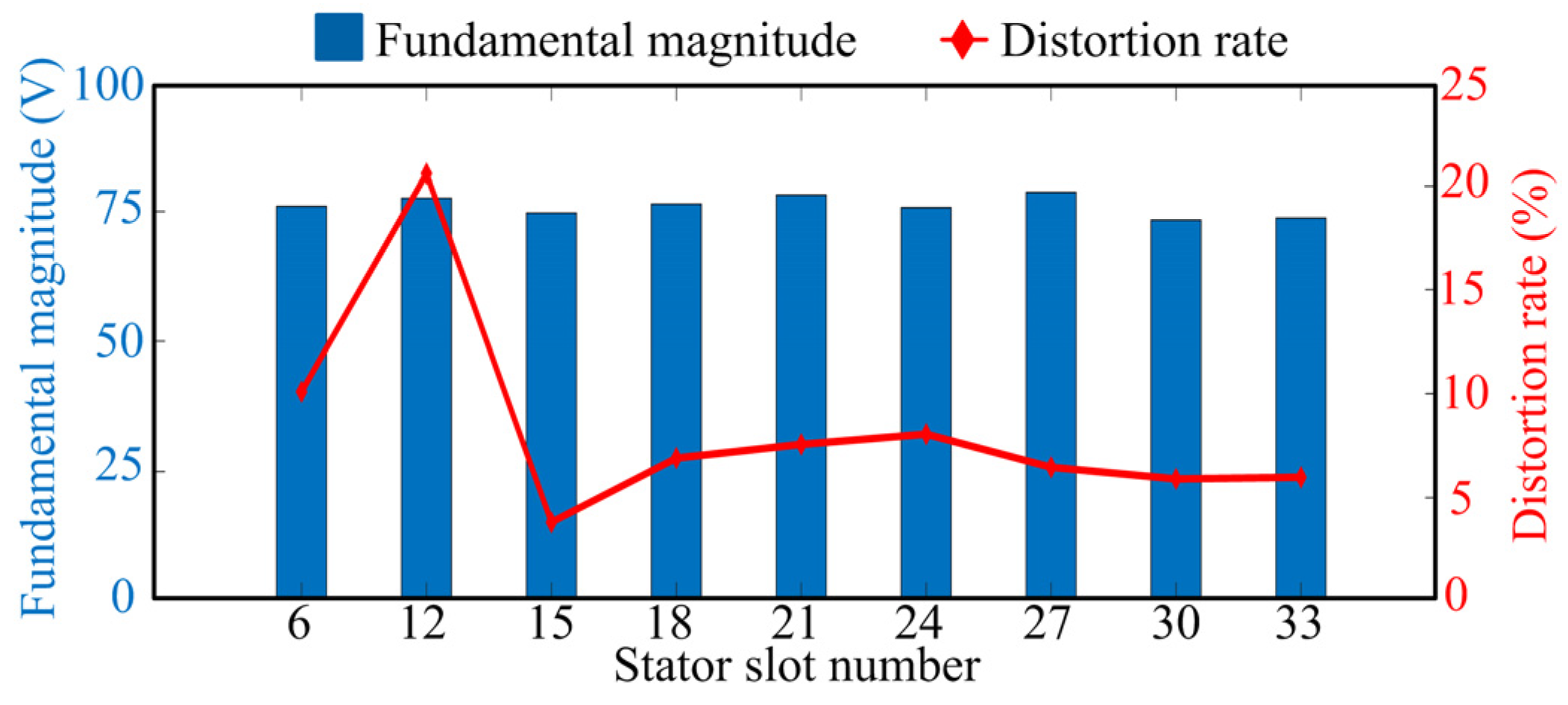
The back EMF is a key performance index in the design process of a machine, whose fundamental magnitude and distortion rate influence the average value and torque ripple of the electromagnetic torque. Therefore, in this section, the fundamental magnitudes and distortion rates of back EMF under different stator slot and rotor pole combinations are calculated and compared.
When the number of rotor poles is 4, 8, and 10, variations in the fundamental magnitudes and distortion rates of back EMF with variation in the number of stator slots are shown in
Figure 2,
Figure 3 and
Figure 4, respectively. It can be seen from
Figure 2,
Figure 3 and
Figure 4 that the fundamental magnitudes of back EMF rarely change with the variation in the number of stator slots, which illustrates the rationality of design schemes under different stator slot and rotor pole combinations. But at the same time, the distortion rates of back EMF waveforms have a greater change with a variation in the number of stator slots, which illustrates that it is important to reasonably select the stator slot and rotor pole combination.
It can be seen from
Figure 2,
Figure 3 and
Figure 4 that when the number of rotor poles is 4, 8, and 10, respectively, and when the number of stator slots is 15, 33, and 27, correspondingly, the distortion rate of back EMF is the lowest, as low as 3.82%, 4.33%, and 4.6%, respectively. On the contrary, when the stator slot and rotor pole combinations are 4-pole and 12-slot, 8-pole and 18-slot, and 10-pole and 15-slot, respectively, the corresponding distortion rate is the largest, up to 20.57%, 14.2%, and 19.35%, respectively.
3.2. Cogging Torque
Cogging torque is the inherent characteristic of a PM machine, whose value directly influences the output torque ripple of the machine. Cogging torque is directly related to the selection for the stator slot and rotor pole combination. Therefore, values of cogging torque under different stator slot and rotor pole combinations are calculated and compared in this section.
When the number of rotor poles is 4, the values of cogging torque under different numbers of stator slots are shown in
Table 5. It can be seen from
Table 5 that when the number of stator slots is 33, the cogging torque is the least, as low as 7.76 mNm, and is only 0.34% of the rated electromagnetic torque. In addition, when the number of rotor poles is 4, the values of cogging torque are all lower than 2% of the rated electromagnetic torque under the selected stator slot and rotor pole combinations except for the stator slot and rotor pole combinations of 4-pole and 6-slot and 4-pole and 12-slot.
Table 6 shows the values of cogging torque under different numbers of stator slots when the number of rotor poles is 8. It can be seen from
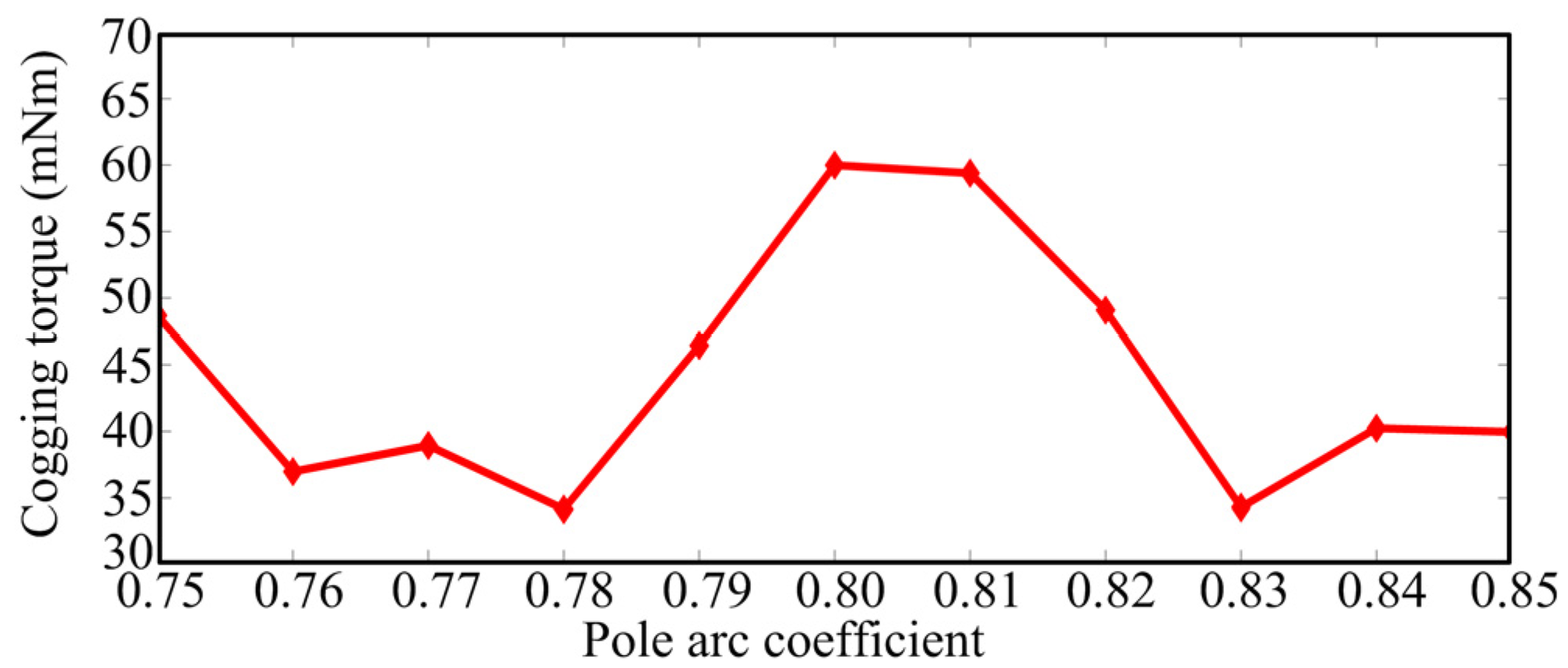
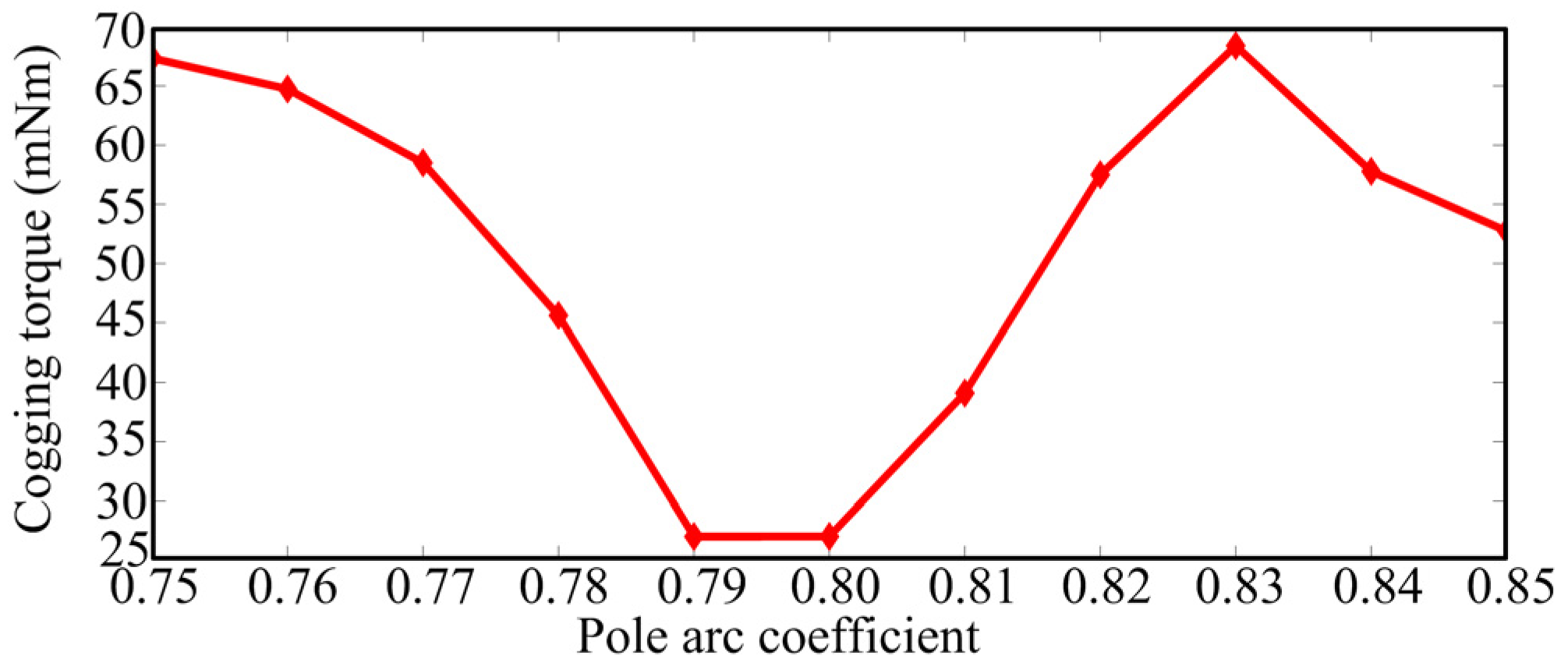
Table 6 that when the number of stator slots is 27, the cogging torque is the least and its value is 2.55% of the rated electromagnetic torque. Thus, when the number of rotor poles is 8, the values of cogging torque are all larger than 2% of the rated electromagnetic torque under the selected stator slot and rotor pole combinations and pole arc coefficient. Further, the effect of pole arc coefficient on cogging torque will be further researched in
Section 4.
Table 7 shows the values of cogging torque under different numbers of stator slots when the number of rotor poles is 10. It can be seen from
Table 7 that when the number of stator slots is 21, the cogging torque is the least. Its value is 1.15% of the rated electromagnetic torque. In addition, when the number of rotor poles is 10, the values of cogging torque are lower than 2% of the rated electromagnetic torque under the stator slot and rotor pole combinations of 10-pole and 9-slot, 10-pole and 21-slot, and 10-pole and 33-slot.
In general, the larger the least common multiple between the number of rotor poles and the number of stator slots, the smaller will be the period of cogging torque and the lower will be the cogging torque. However, it can be seen from
Table 5,
Table 6 and
Table 7 that the values of cogging torque do not change strictly according to the above rule. But on the whole, under different numbers of rotor poles, the values of cogging torque all have a decreasing trend with the increase in the least common multiple between the number of rotor poles and the number of stator slots.
3.3. Electromagnetic Torque
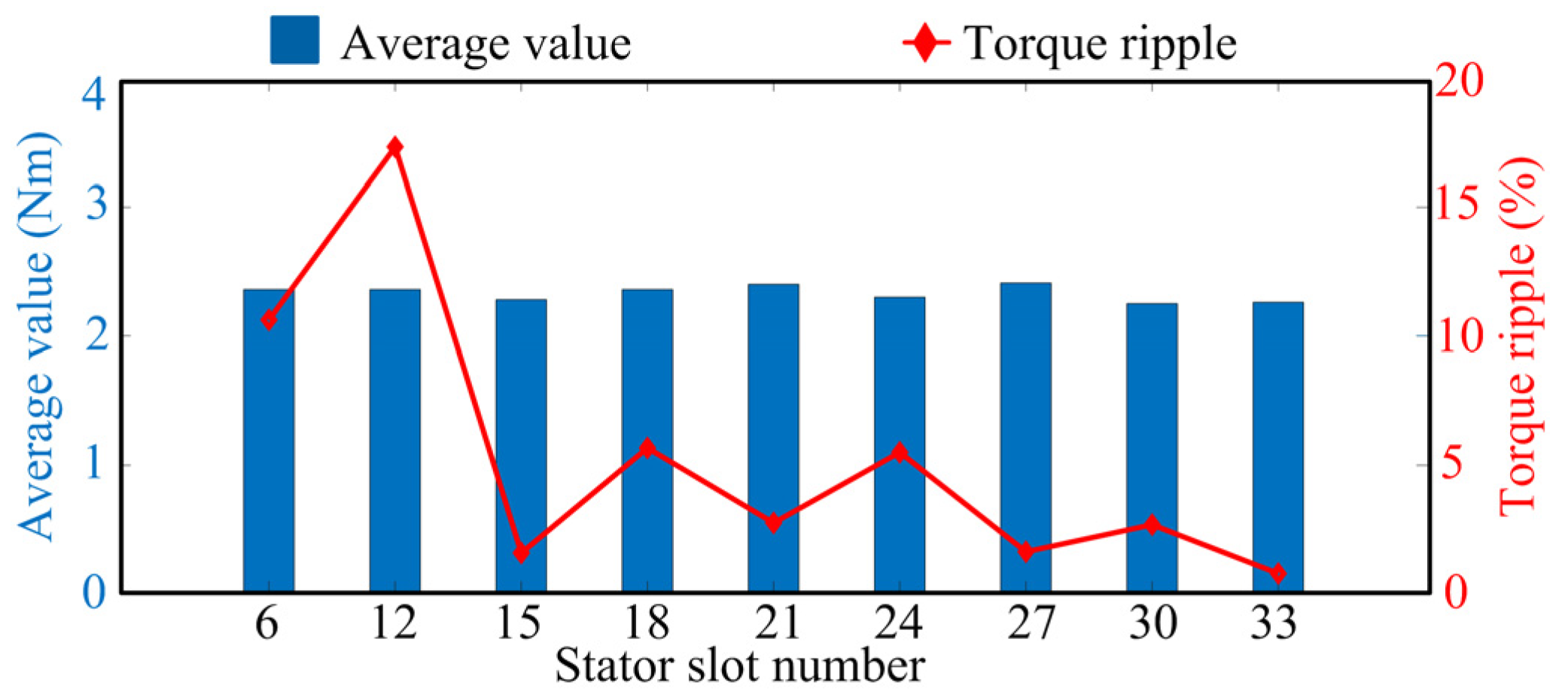
Electromagnetic torque is a key performance index that plays a decisive role in the operation stability of the SPM machine. Therefore, the average value and torque ripple of electromagnetic torque under different stator slot and rotor pole combinations are calculated and compared in this section. In addition, the armature current is set to be 4.6 A to calculate the electromagnetic torque under rated load condition.
When the number of rotor poles is 4, 8, and 10, the variations in the average values and torque ripples of electromagnetic torque with different numbers of stator slots are shown in
Figure 5,
Figure 6 and
Figure 7, respectively. It can be seen from
Figure 5,
Figure 6 and
Figure 7 that the average values of electromagnetic torque undergo little change with the variation in the number of stator slots, which illustrates that SPM machines under different stator slot and rotor pole combinations can have basically the same output torque capacity by reasonable design schemes. But the torque ripple of electromagnetic torque undergoes a larger change with the variation in the number of stator slots. So it is important to select the appropriate stator slot and rotor pole combination to guarantee the operation stability of the SPM machine.
It can be seen from
Figure 5 that under the condition that the number of rotor poles is 4, when the number of stator slots is 33, the torque ripple of electromagnetic torque is the lowest, as low as 0.8051%. In addition, when the number of stator slots is 15 and 27, respectively, the torque ripple in both cases is lower than 2%, and the values are 1.6017% and 1.6482%, respectively. On the contrary, when the number of stator slots is 12, the torque ripple is the highest, up to 17.3297%. Meanwhile, when the number of stator slots is 6, 18, and 24, respectively, the torque ripple is also higher.
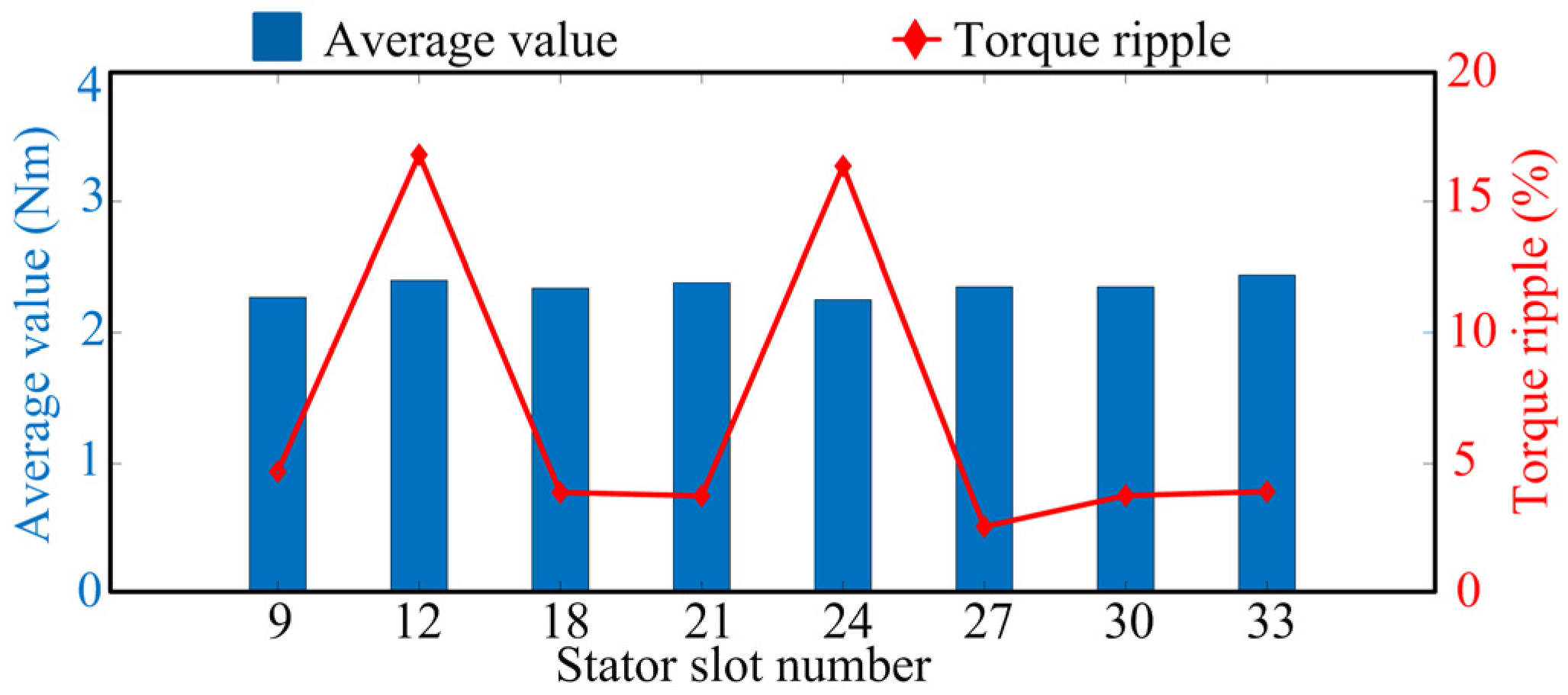
Similarly, when the number of rotor poles is 8, it can be seen from
Figure 6 that when the number of stator slots is 27, the torque ripple of electromagnetic torque is the lowest, as low as 2.5884%. When the number of stator slots is 12, the torque ripple is the highest, up to 16.7879%. In addition, when the number of stator slots is 24, the torque ripple is also larger.
Similarly, it can be seen from
Figure 7 that under the condition that the number of rotor poles is 10, when the number of stator slots is 21, the torque ripple of electromagnetic torque is the lowest, as low as 1.4725%. Meanwhile, when the number of stator slots is 33, the torque ripple is also lower than 2%, which is 1.6274%. In addition, when the number of stator slots is 24 and 27, respectively, the torque ripple is also lower, that is 2.39% and 2.3417%, respectively. Contrarily, when the number of stator slots is 15, the torque ripple is the highest, up to 18.5162%. Meanwhile, when the number of stator slots is 30, the torque ripple is also higher, that is, 14.2126%.
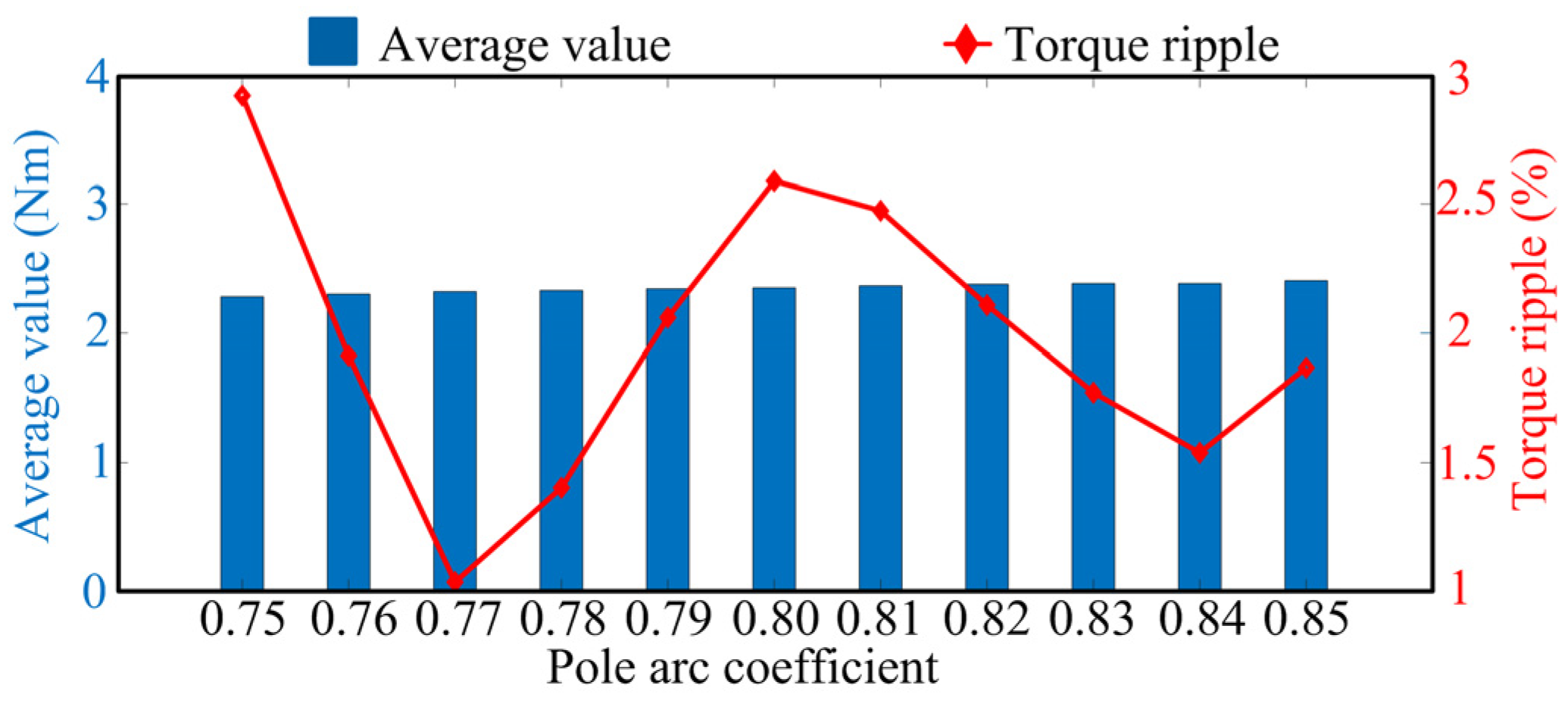
In addition, it can be seen from the results of research on cogging torque and electromagnetic torque that the stator slot and rotor pole combinations to make cogging torque and electromagnetic torque ripple lower are almost consistent. Among them, the corresponding stator slot and rotor pole combination to make cogging torque and electromagnetic torque ripple minimum are 4-pole and 33-slot, 8-pole and 27-slot, and 10-pole and 21-slot, respectively. In this section, research on effects of stator slot and rotor pole combinations on cogging torque and electromagnetic torque is conducted under the condition that the pole arc coefficient is 0.8. Under this pole arc coefficient, the values of cogging torque and electromagnetic torque ripple are all larger when the number of rotor poles is 8. Hence, effects of pole arc coefficient on cogging torque and electromagnetic torque will be looked at in
Section 4.
3.4. Loss and Efficiency
Efficiency is another key performance index in the design process of an SPM machine. To calculate the efficiency of the SPM machine, the various losses in the machine need to be calculated first, including copper loss, iron loss, and mechanical loss. Among them, mechanical loss is related to the speed of the machine and has nothing to do with the stator slot and rotor pole combination. It is generally considered that the value of mechanical loss is 1% of the output power. In the SPM machines adopting different stator slot and rotor pole combinations, the resistance values are different due to the different winding arrangements and the number of conductors per slot, which results in differences in copper loss. Further, the stator slot and rotor pole combination influences the flux density at each point of stator and rotor cores and the frequency of the rotational magnetic field, which results in differences in iron loss in SPM machines adopting different stator slot and rotor pole combinations. In this section, values of various losses and efficiency of SPM machines adopting different stator slot and rotor pole combinations are calculated and compared.
Table 8,
Table 9 and
Table 10 show the values of various losses and efficiency under different numbers of stator slots, when the number of rotor poles is 4, 8, and 10, respectively. It can be seen from
Table 8,
Table 9 and
Table 10 that the iron loss of the machine increases with the increase in the number of rotor poles. The reason is that the frequency of the rotational magnetic field increases with the increase in the number of rotor poles. Meanwhile, with the increase in the number of rotor poles, the coil pitch decreases and the end length of winding becomes shorter, which decreases the copper loss of the machine. Therefore, under different stator slot and rotor pole combinations, there is little change in the values of total loss and further little difference in the values of efficiency.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}