Metrological Validation of Pixhawk Autopilot Magnetometers in Helmholtz Cage



Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
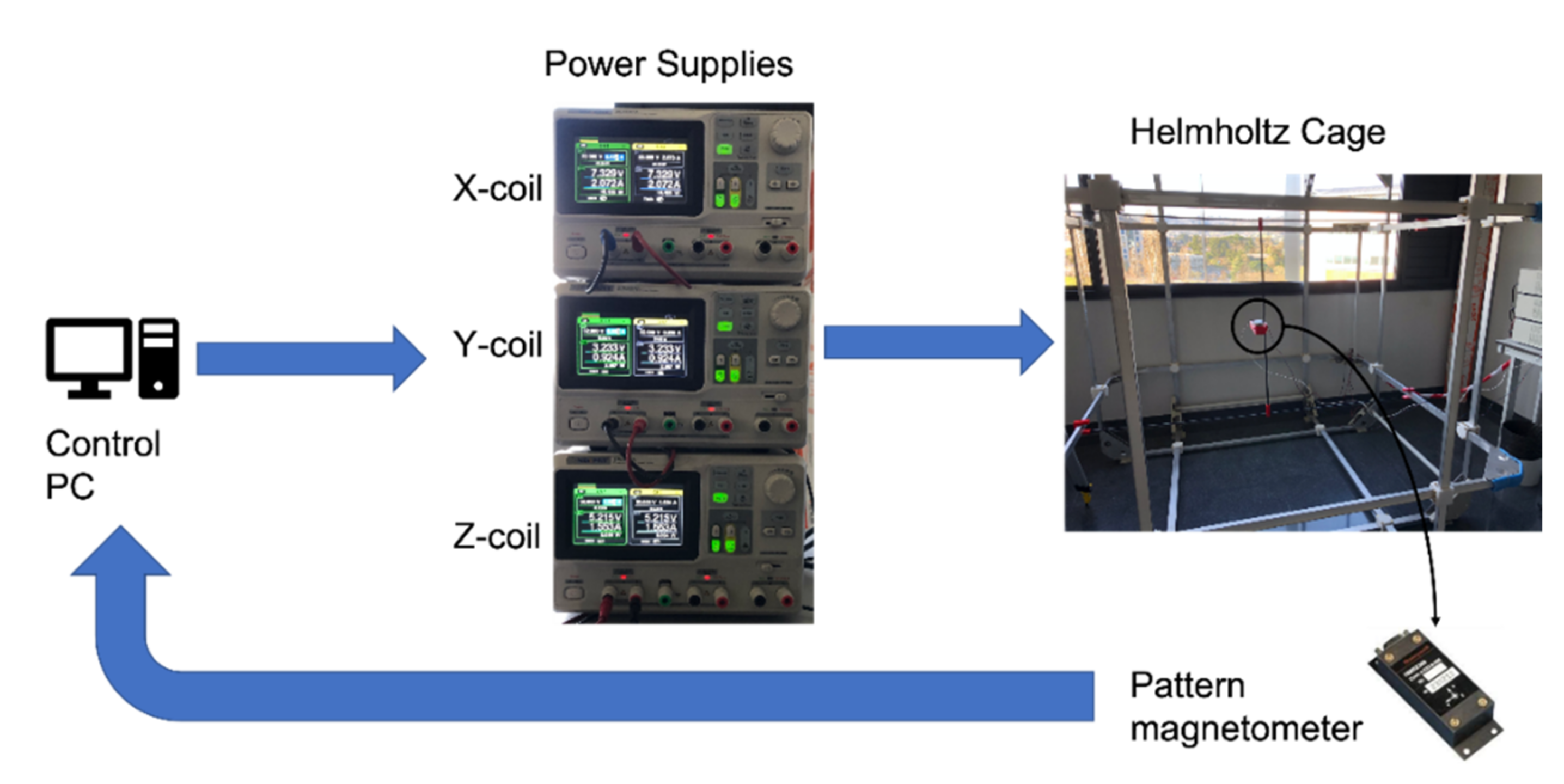
2.1.1. Testing Facility
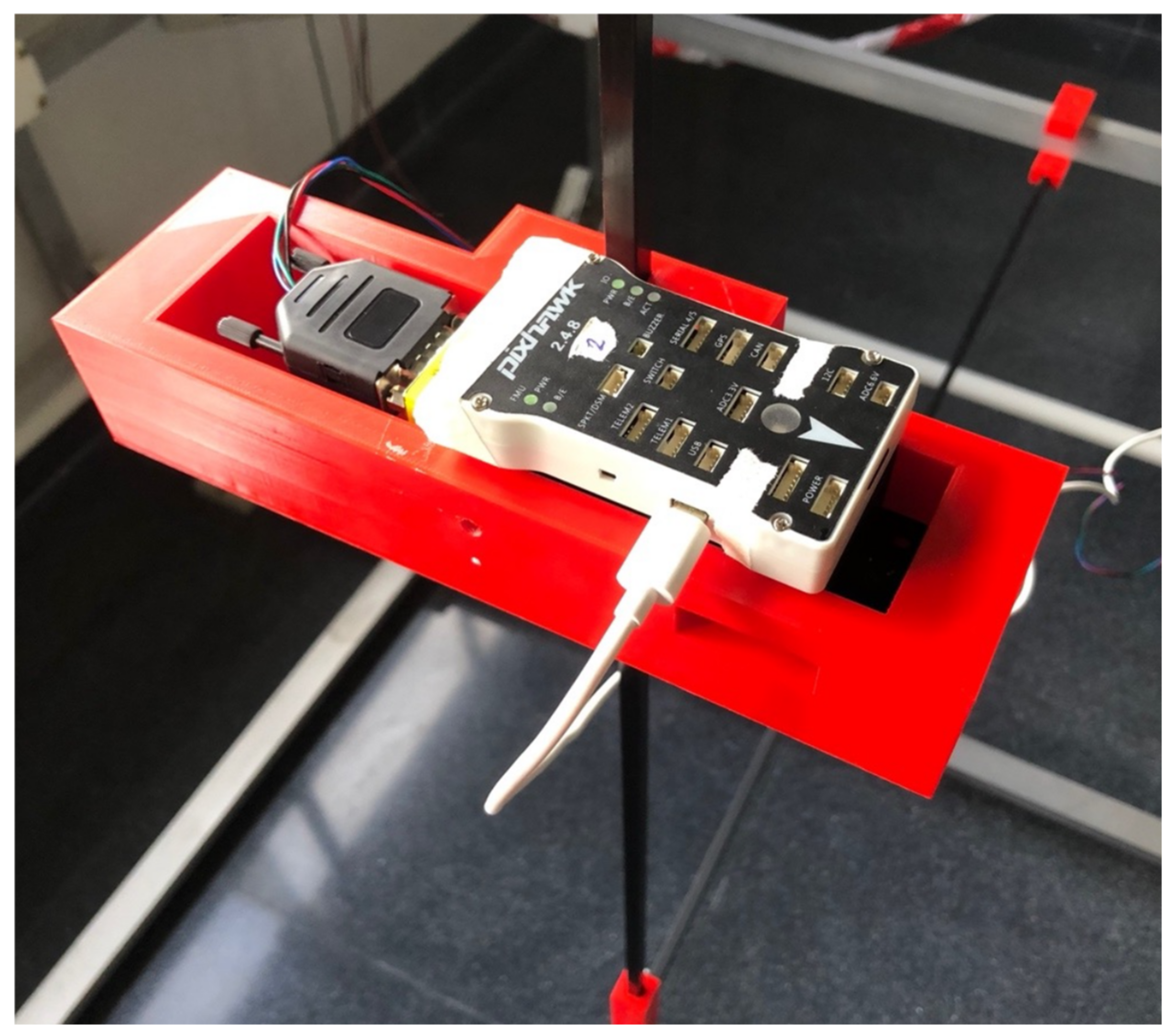
2.1.2. Pixhawk Magnetometers
2.2. Testing Methodology
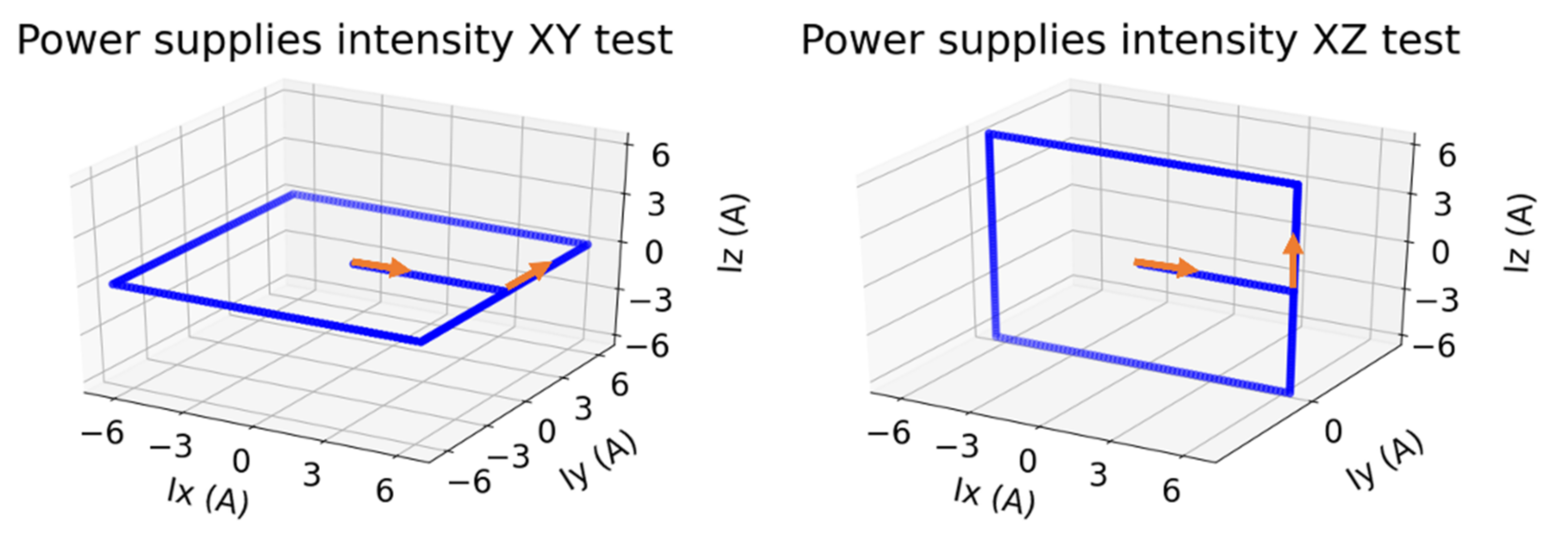
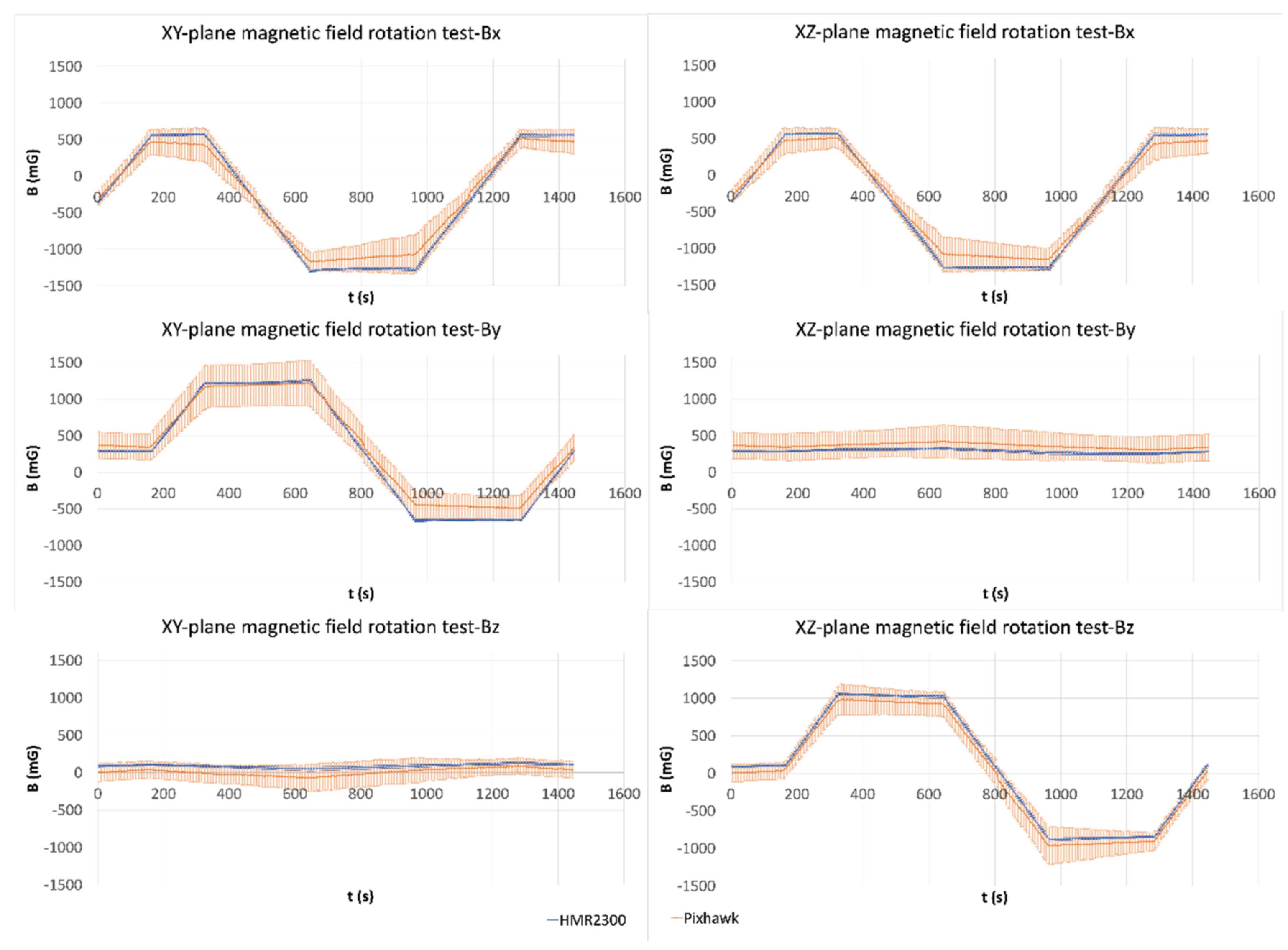
2.2.1. Magnetic Field Rotation Test
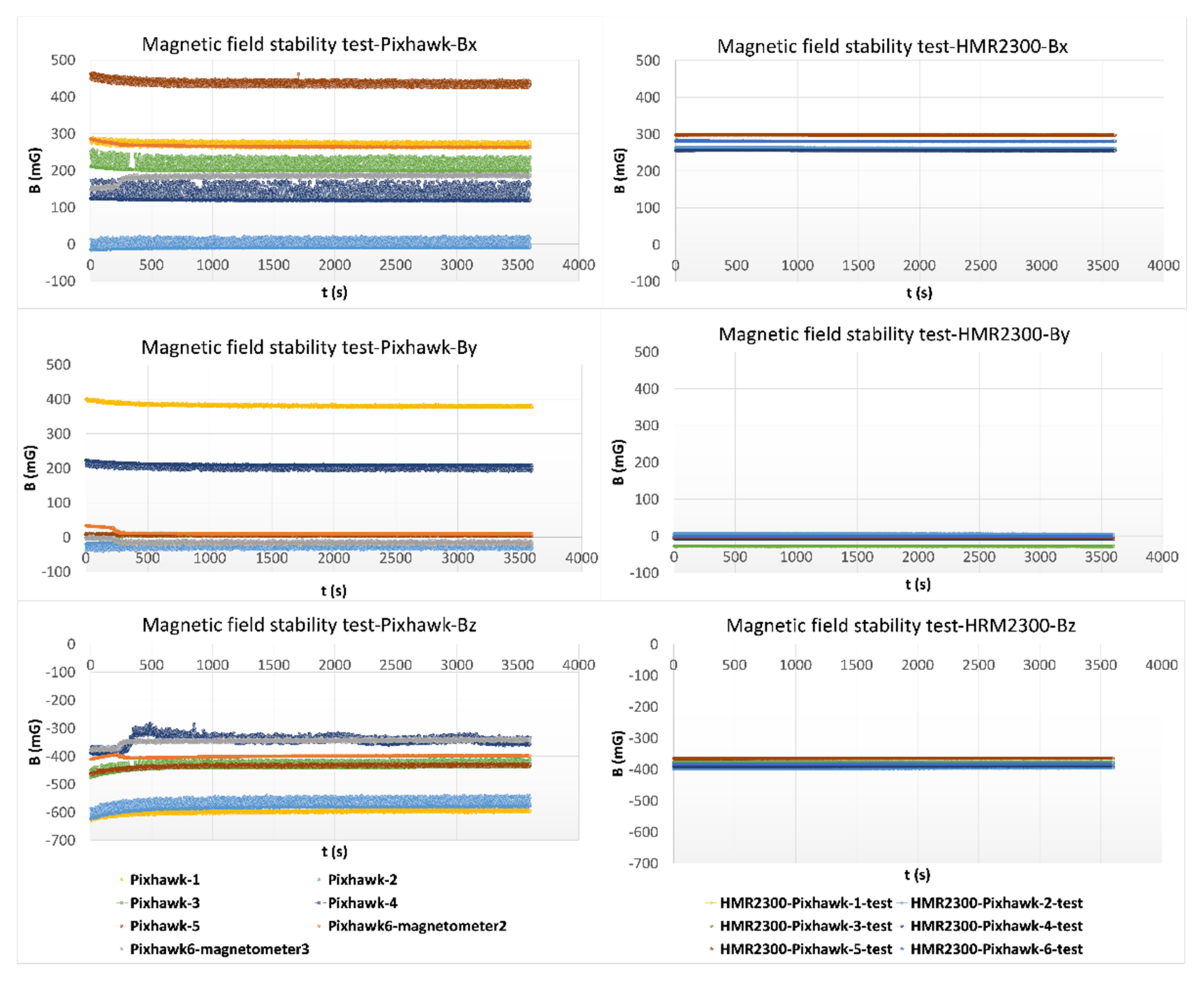
2.2.2. Magnetic Field Stability Test
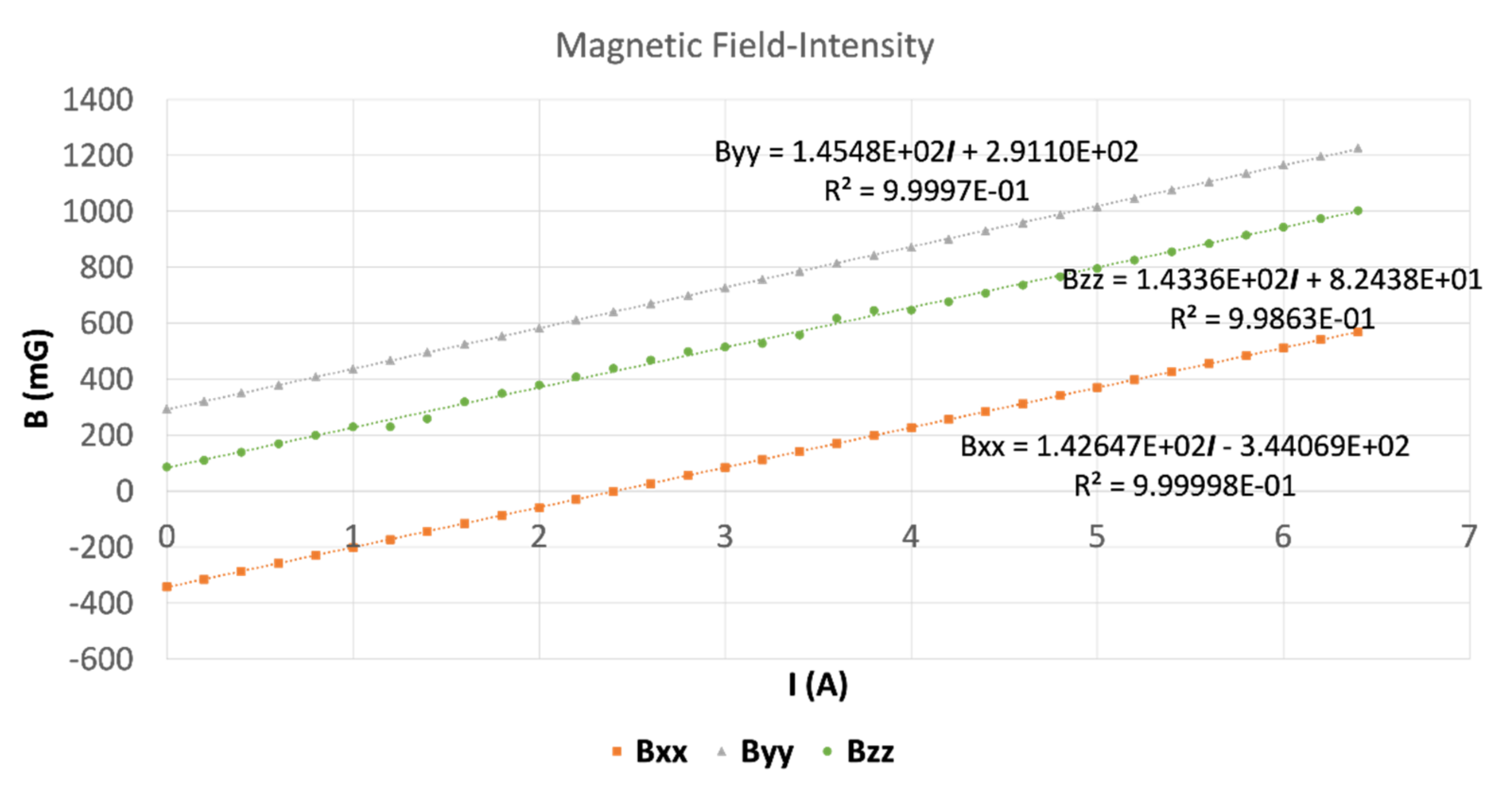
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Nonami, K. Prospect and Recent Research & Development for Civil Use Autonomous Unmanned Aircraft as UAV and MAV. J. Syst. Des. Dyn. 2007, 1, 120–128. [Google Scholar] [CrossRef] [Green Version]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Costa, F.G.; Ueyama, J.; Braun, T.; Pessin, G.; Osorio, F.S.; Vargas, P.A. The use of unmanned aerial vehicles and wireless sensor network in agricultural applications. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 5045–5048. [Google Scholar] [CrossRef]
- González-Jorge, H.; Martínez-Sánchez, J.; Bueno, M.; Arias, P. Unmanned Aerial Systems for Civil Applications: A Review. Drones 2017, 1, 2. [Google Scholar] [CrossRef]
- Otto, A.; Agatz, N.; Campbell, J.; Golden, B.; Pesch, E. Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: A survey. Networks 2018, 72, 411–458. [Google Scholar] [CrossRef]
- Chao, H.; Cao, Y.; Chen, Y. Autopilots for small unmanned aerial vehicles: A survey. Int. J. Control Autom. Syst. 2010, 8, 36–44. [Google Scholar] [CrossRef]
- Yang, Z.; Lin, F.; Chen, B.M. Survey of autopilot for multi-rotor unmanned aerial vehicles′. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 6122–6127. [Google Scholar] [CrossRef]
- Kendoul, F.; Zhenyu, Y.; Nonami, K. Embedded autopilot for accurate waypoint navigation and trajectory tracking: Application to miniature rotorcraft UAVs. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 2884–2890. [Google Scholar] [CrossRef]
- Kortunov, V.I.; Mazurenko, O.V.; Gorbenko, A.V.; Mohammed, W.; Hussein, A. Review and comparative analysis of mini- and micro-UAV autopilots. In Proceedings of the 2015 IEEE International Conference Actual Problems of Unmanned Aerial Vehicles Developments (APUAVD), Kyiv, Ukraine, 13–15 October 2015; pp. 284–289. [Google Scholar] [CrossRef]
- Brzozowski, B.; Kazmierczak, K. Magnetic field mapping as a support for UAV indoor navigation system. In Proceedings of the 2017 IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Padua, Italy, 21–23 June 2017; pp. 583–588. [Google Scholar] [CrossRef]
- Brzozowski, B.; Kaźmierczak, K.; Rochala, Z.; Wojda, M.; Wojtowicz, K. A concept of UAV indoor navigation system based on magnetic field measurements. In Proceedings of the 2016 IEEE Metrology for Aerospace (MetroAeroSpace), Florence, Italy, 22–23 June 2016; pp. 636–640. [Google Scholar] [CrossRef]
- Brewer, M. CubeSat Attitude Determination and Helmholtz Cage Design; Department of the Air Force Air University Air Force Institute of Technology: Dayton, OH, USA, 2012; Available online: https://scholar.afit.edu/cgi/viewcontent.cgi?article=2033&context=etd (accessed on 14 January 2022).
- Da Silva, R.C.; Ishioka, I.S.K.; Cappelletti, C.; Battistini, S.; Borges, R.A. Helmholtz Cage Design and Validation for Nanosatellites HWIL Testing. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3050–3061. [Google Scholar] [CrossRef] [Green Version]
- Foley, J.D. Calibration and Characterization of Cubesat Magnetic Sensors Using a Helmholtz Cage; California Polytechnic State University: San Luis Obispo, CA, USA, 2012. [Google Scholar] [CrossRef] [Green Version]
- Wegner, S.; Majd, E.; Taylor, L.; Egziabher, D.G.; Thomas, R. Methodology for Software-in-the-Loop Testing of Low-Cost Attitude Determination Systems. In Proceedings of the 31st Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 5–10 August 2017. [Google Scholar]
- Serviciencia, S.L.U. Two-Metres, Three-Axis (3D), Square Helmholtz Coils. 2018. Available online: http://www.serviciencia.es/folletos/BHC2000-3AB-Specifications-1.pdf (accessed on 22 February 2022).
- Dronecode, px4 Autopilot. In Pixhawk Series. 2020. Available online: https://docs.px4.io/master/en/flight_controller/pixhawk_series.html (accessed on 23 February 2022).
- Microelectronics, S.T. LSM303D Ultra-Compact High-Performance eCompass Module: 3D Accelerometer and 3D Magnetometer. 2013. Available online: https://www.st.com/en/mems-and-sensors/lsm303d.html (accessed on 17 February 2022).
- Invensense, T.D.K. MPU-9250 Product Specification. 2016. Available online: https://invensense.tdk.com/wp-content/uploads/2015/02/PS-MPU-9250A-01-v1.1.pdf (accessed on 17 February 2022).
- ArduPilot Development Team. ArduPilot. 2020. Available online: https://ardupilot.org/planner/index.html (accessed on 17 February 2022).
- National Oceanic and Atmospheric Administration. Magnetic Field Calculators. Available online: https://www.ngdc.noaa.gov/geomag/calculators/magcalc.shtml#igrfwmm (accessed on 17 February 2022).
- García, J.; Molina, J.M.; Trincado, J.; Sánchez, J. Analysis of sensor data and estimation output with configurable UAV platforms. In Proceedings of the 2017 Sensor Data Fusion: Trends, Solutions, Applications (SDF), Bonn, Germany, 10–12 October 2017; pp. 1–6. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pixhawk Reference | Model | Magnetic Measurement Range (G) | Magnetic Sensitivity (mG/LSB) | Magnetometer Model |
|---|---|---|---|---|
| Pixhawk 1 | 2.4.8 | 12 | 0.479 | ST Micro LSM303D 3 [18] |
| Pixhawk 2 | 2.4.8 | |||
| Pixhawk 3 | 2.4.8 | |||
| Pixhawk 4 | 2.4.8 | |||
| Pixhawk 5 | 1 | |||
| Pixhawk 6 | 2.1-CubeBlack | 12 | 0.479 | ST Micro LSM303D 3 [18] |
| 48 | 6 | MPU9250 [19] |
| Direction | B0 (mG) | BOU (mG) | Itest (A) |
|---|---|---|---|
| X | −382.47 | 246.63 | 2.205 |
| Y | 282.22 | −6.53 | −0.947 |
| Z | 95.73 | 382.32 | −1.666 |
| Magnetometer Test | Instrument | BPP (mG) |
|---|---|---|
| Pixhawk-1 | HMR2300 | 2.5 |
| Pixhawk | 40 | |
| Pixhawk-2 | HMR2300 | 5.3 |
| Pixhawk | 86 | |
| Pixhawk-3 | HMR2300 | 5.4 |
| Pixhawk | 65 | |
| Pixhawk-4 | HMR2300 | 2.2 |
| Pixhawk | 116 | |
| Pixhawk-5 | HMR2300 | 1.5 |
| Pixhawk | 42 | |
| Pixhawk-6 | HMR2300 | 1.3 |
| Pixhawk-mag2 | 25 | |
| Pixhawk-mag3 | 49 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fariñas-Álvarez, N.; Navarro-Medina, F.; González-Jorge, H. Metrological Validation of Pixhawk Autopilot Magnetometers in Helmholtz Cage. World Electr. Veh. J. 2022, 13, 85. https://doi.org/10.3390/wevj13050085
Fariñas-Álvarez N, Navarro-Medina F, González-Jorge H. Metrological Validation of Pixhawk Autopilot Magnetometers in Helmholtz Cage. World Electric Vehicle Journal. 2022; 13(5):85. https://doi.org/10.3390/wevj13050085
Chicago/Turabian StyleFariñas-Álvarez, Noelia, Fermín Navarro-Medina, and Higinio González-Jorge. 2022. "Metrological Validation of Pixhawk Autopilot Magnetometers in Helmholtz Cage" World Electric Vehicle Journal 13, no. 5: 85. https://doi.org/10.3390/wevj13050085
APA StyleFariñas-Álvarez, N., Navarro-Medina, F., & González-Jorge, H. (2022). Metrological Validation of Pixhawk Autopilot Magnetometers in Helmholtz Cage. World Electric Vehicle Journal, 13(5), 85. https://doi.org/10.3390/wevj13050085