
Comparative Study of BLDC Motor Drives with Different Approaches: FCS-Model Predictive Control and Hysteresis Current Control


Abstract
:1. Introduction
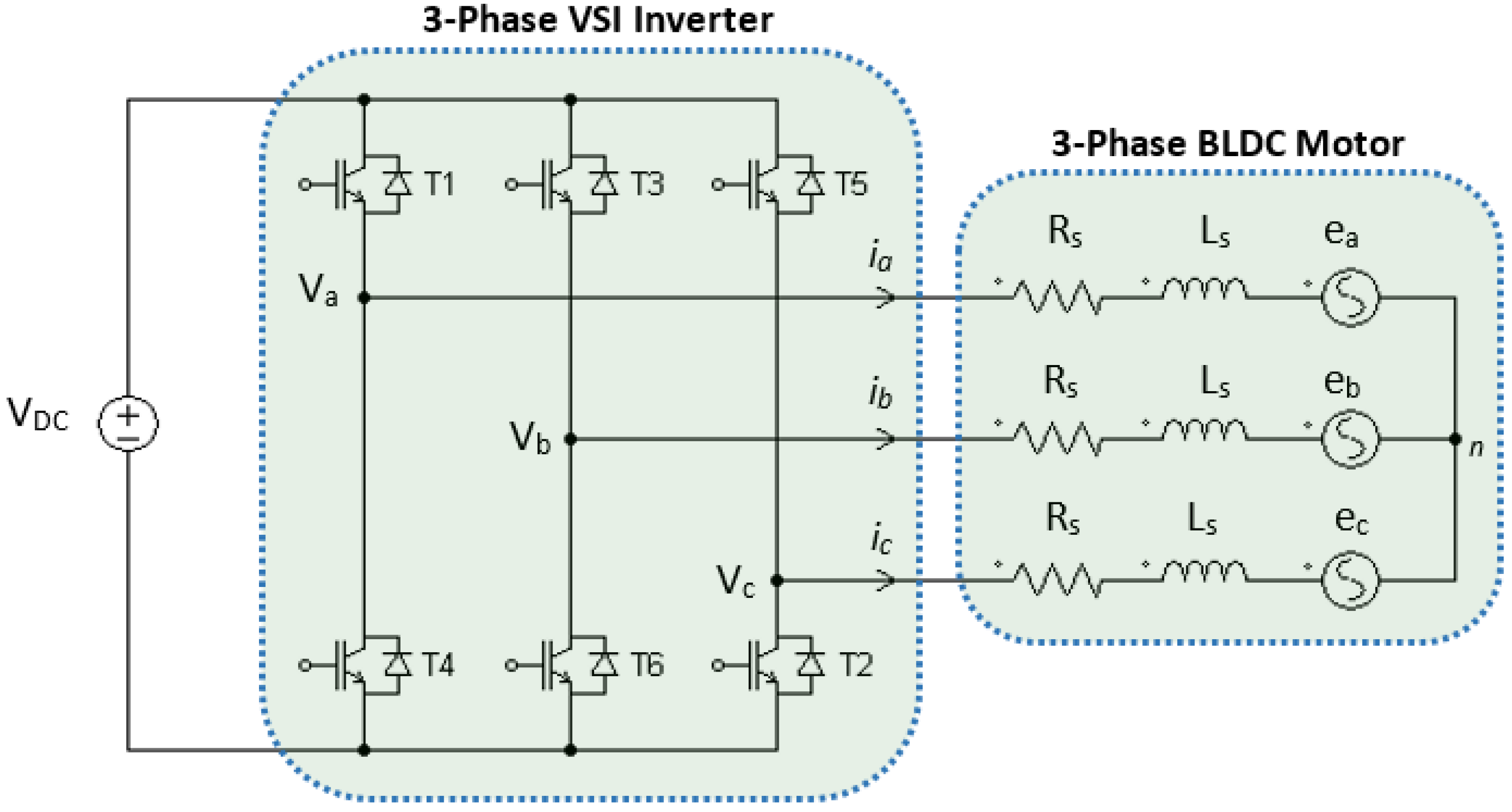
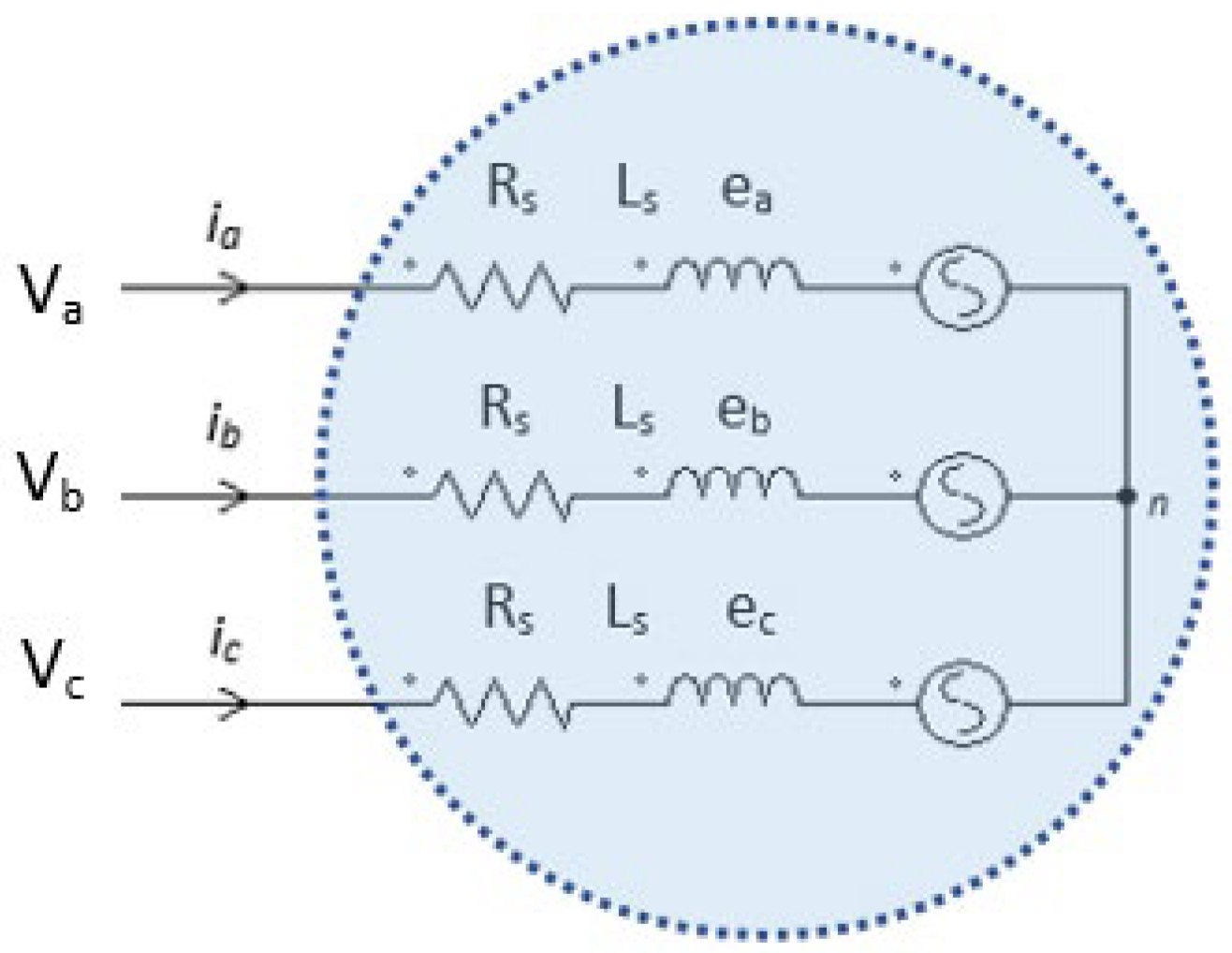
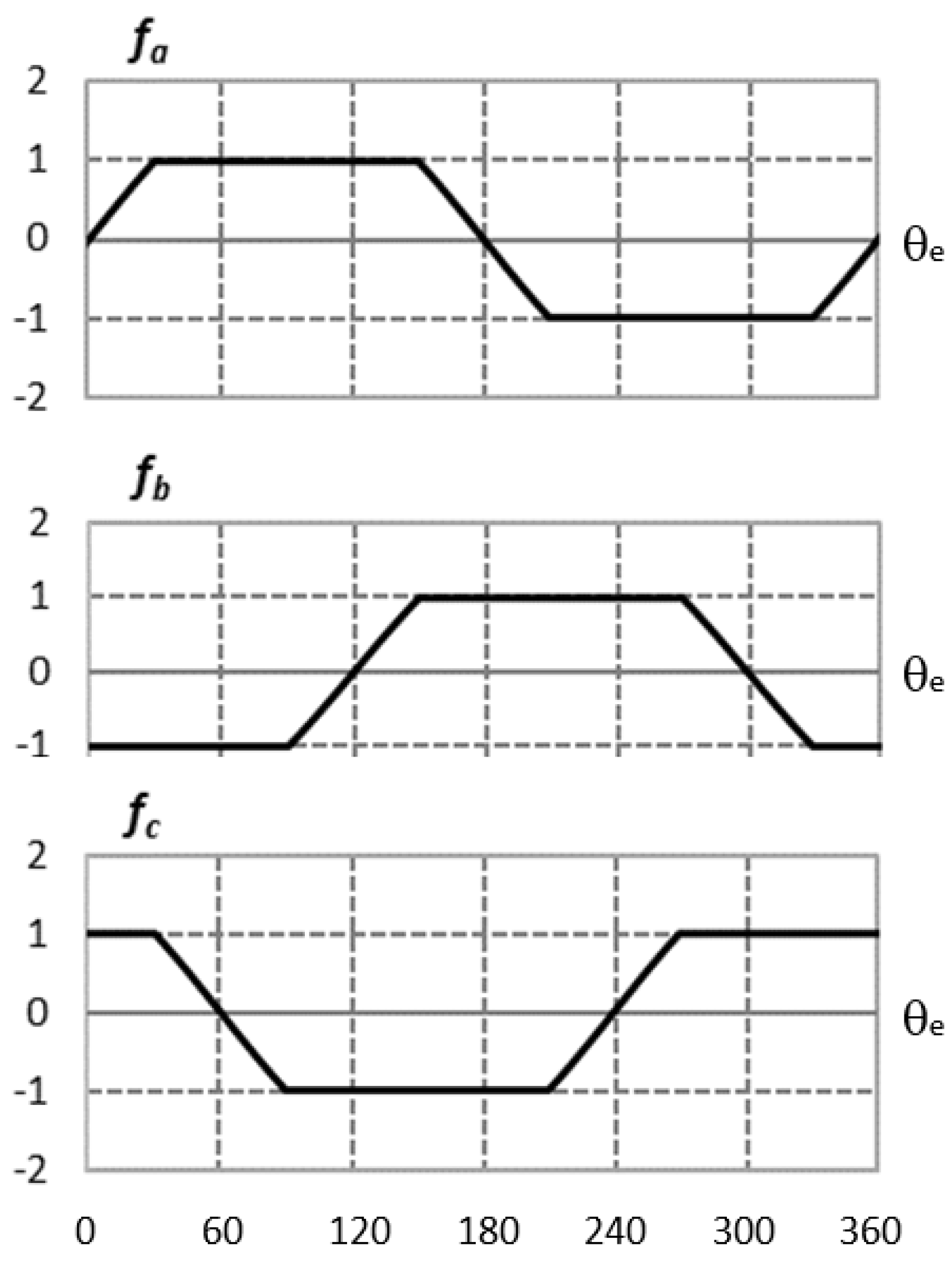
2. Mathematical Model of the BLDC Motor
3. Description of the Three Investigated Systems
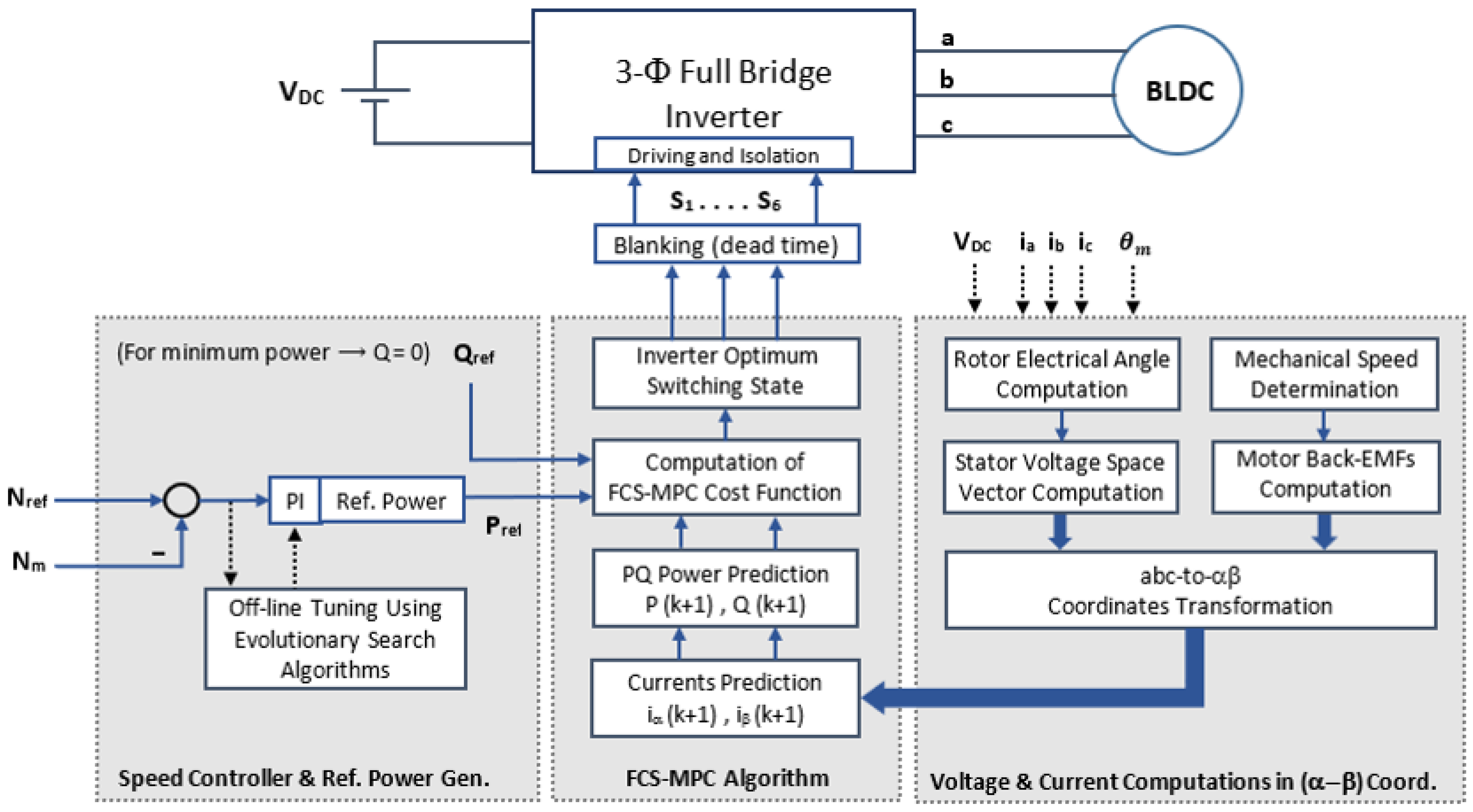
3.1. Direct Power Control Scheme (PQ FCS-MPC)
3.1.1. Block Diagram of the Direct Power Control Scheme (PQ FCS-MPC)
3.1.2. Prediction of Stator Currents One Sample Ahead
3.1.3. Computation of the Stator Voltage Space Vector
3.1.4. Computation of the Motor Back-EMFs in (α–β) Coordinates
3.1.5. Prediction of Active and Reactive Power
3.1.6. Formulation of the Cost Function
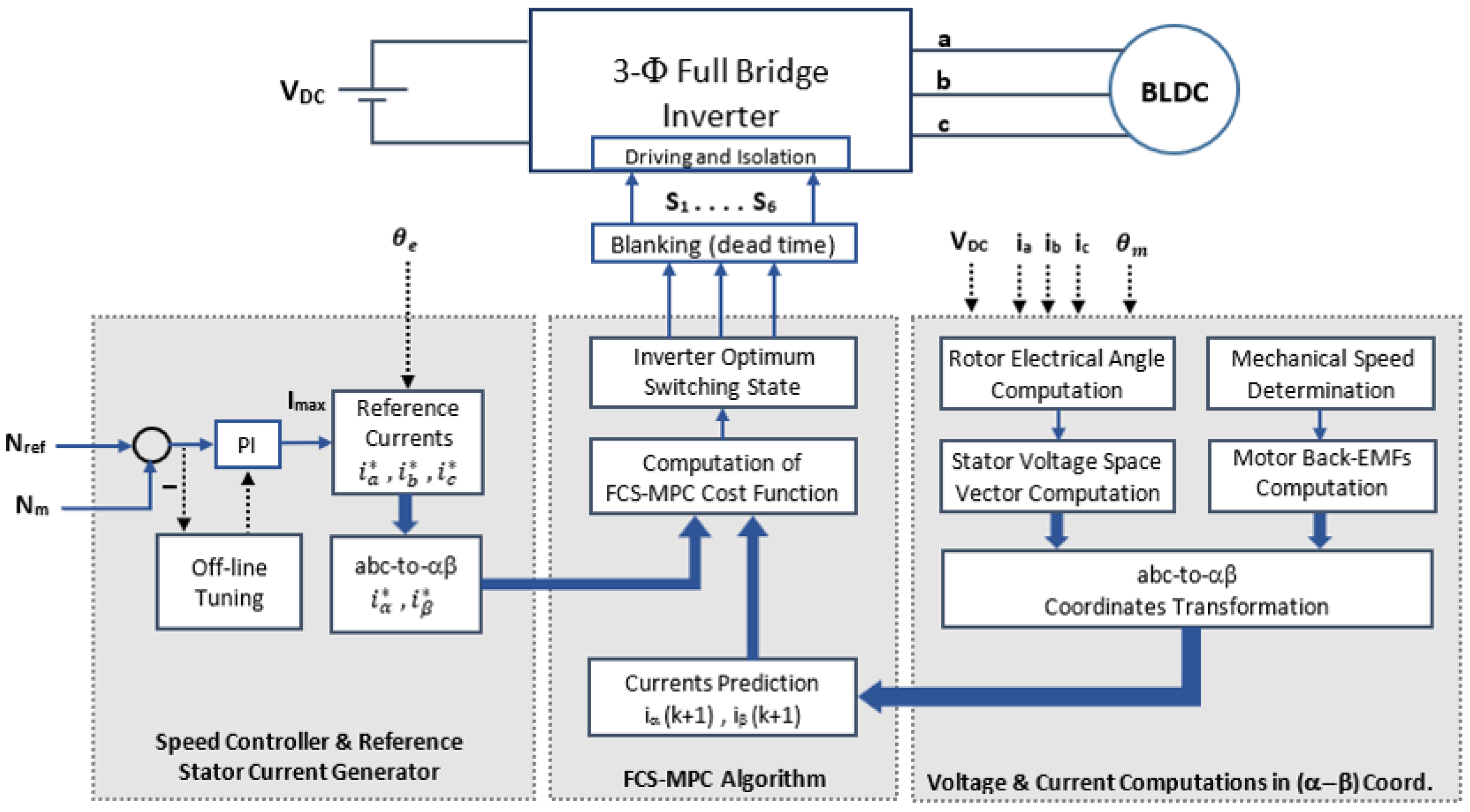
3.2. Stator Current Controlled Scheme (CC FCS-MPC)
3.2.1. Block Diagram of the Stator Current Controlled Scheme (CC FCS-MPC)
3.2.2. Formulation of the Cost Function
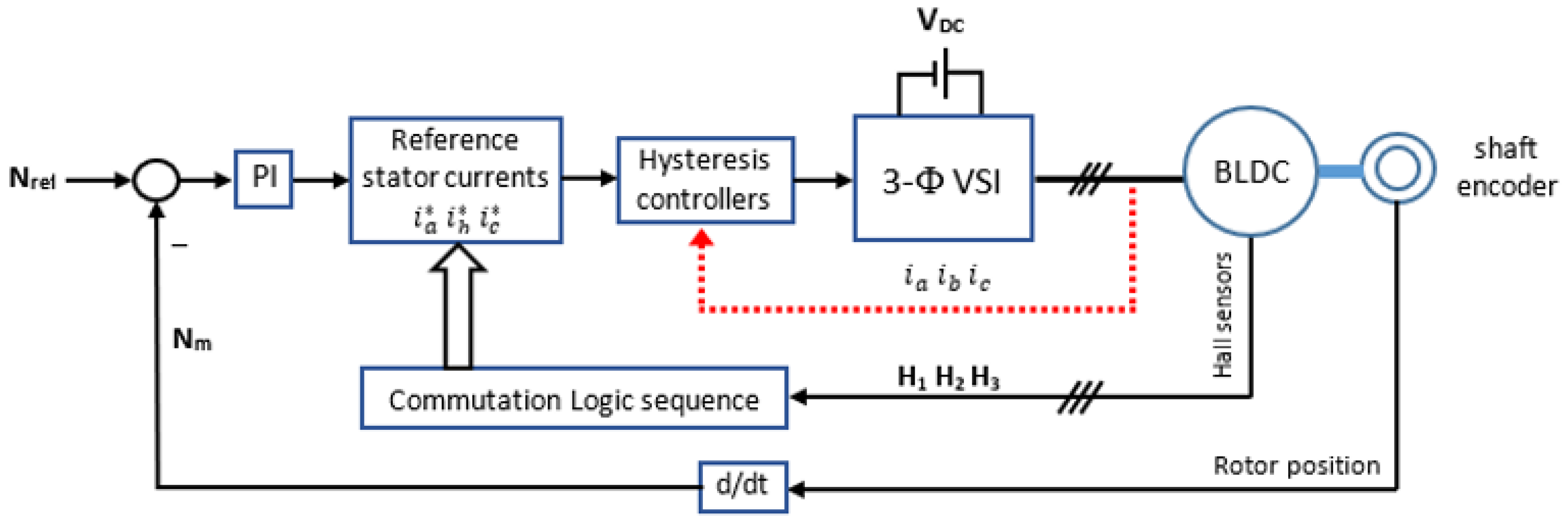
3.3. Stator Current Controlled Scheme with Hysteresis Current Controllers (Hysteresis CC)
4. Selected Simulation Results of the Investigated Systems
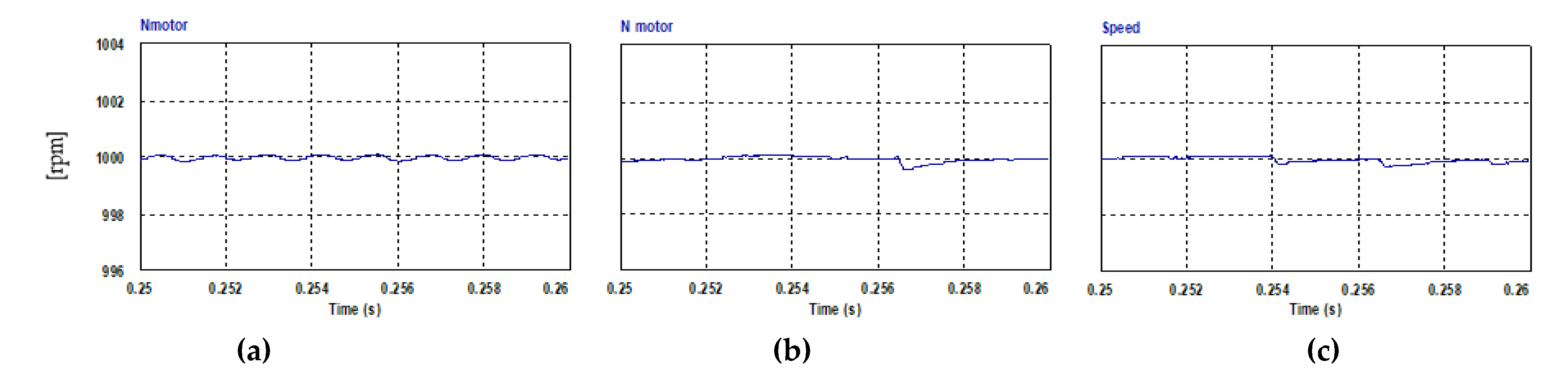
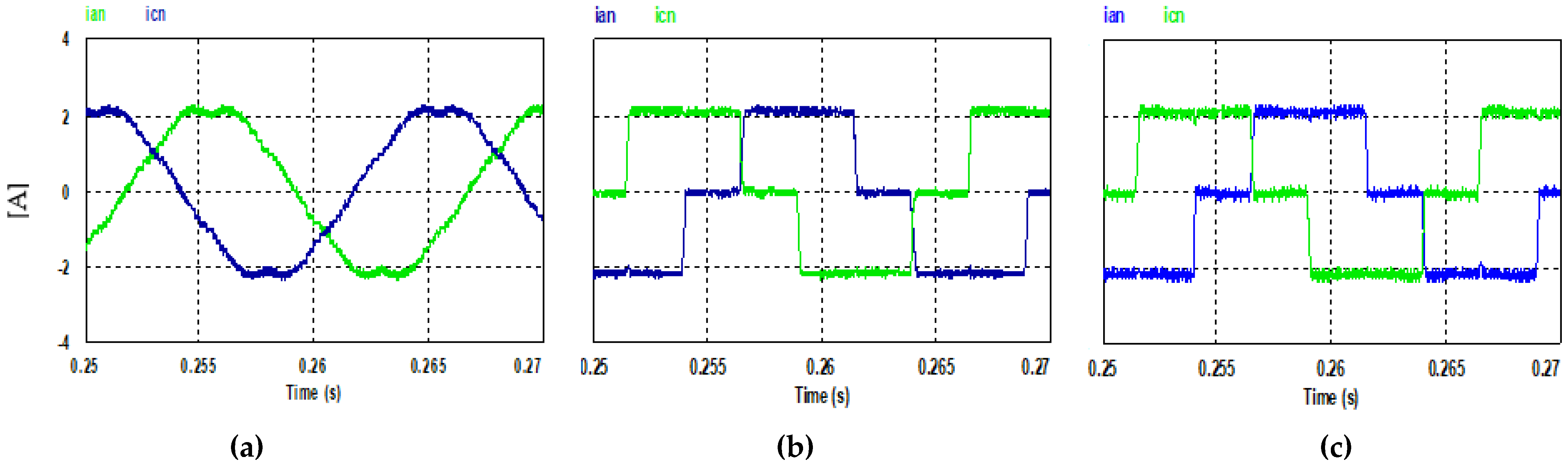
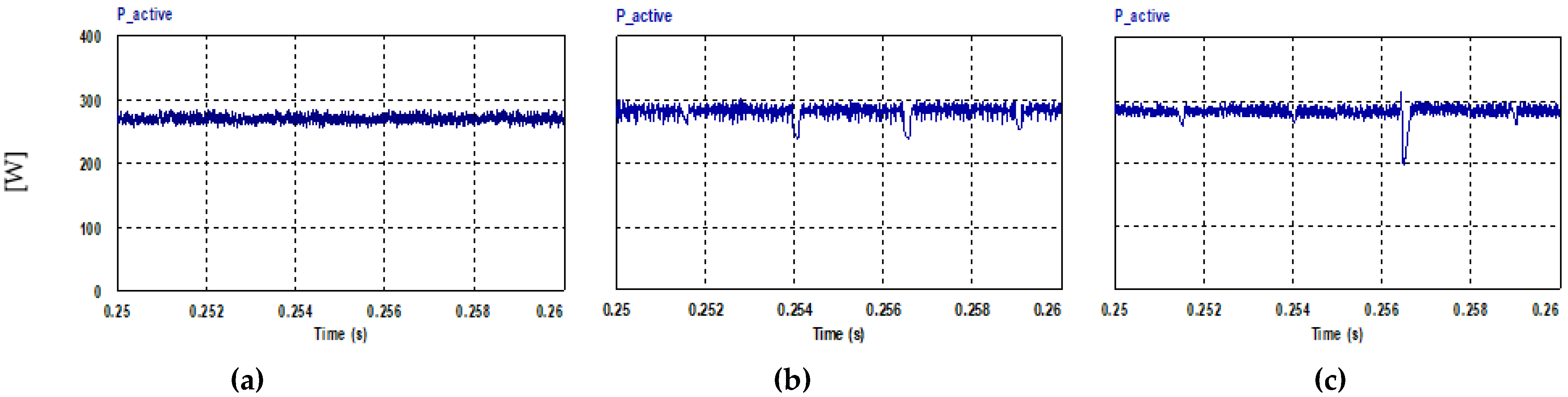
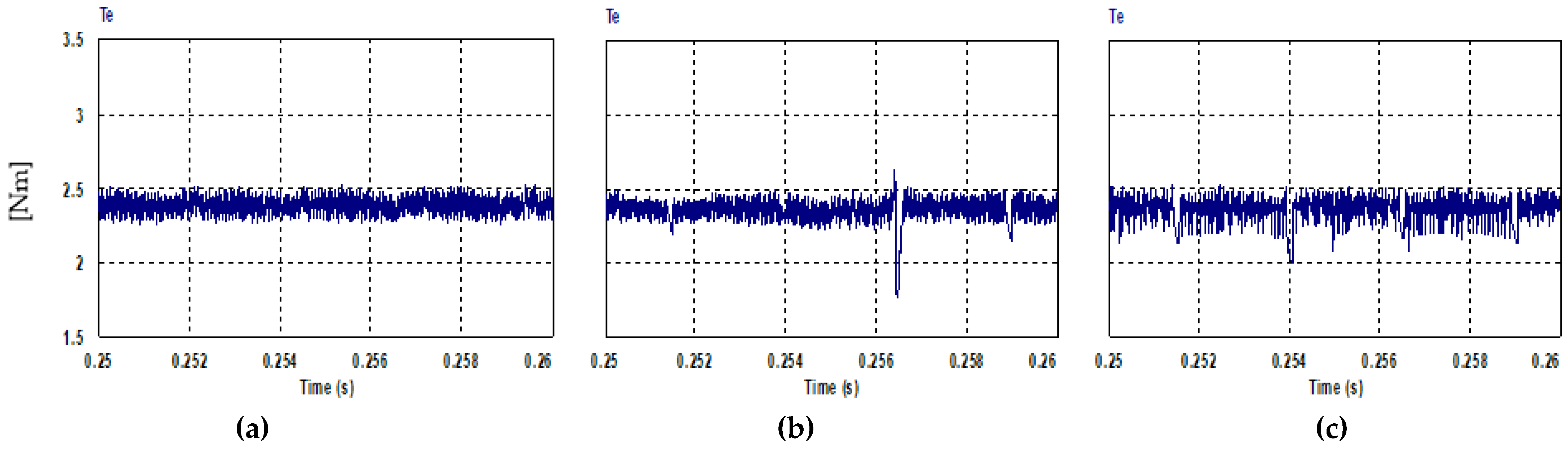
4.1. Steady State Performance
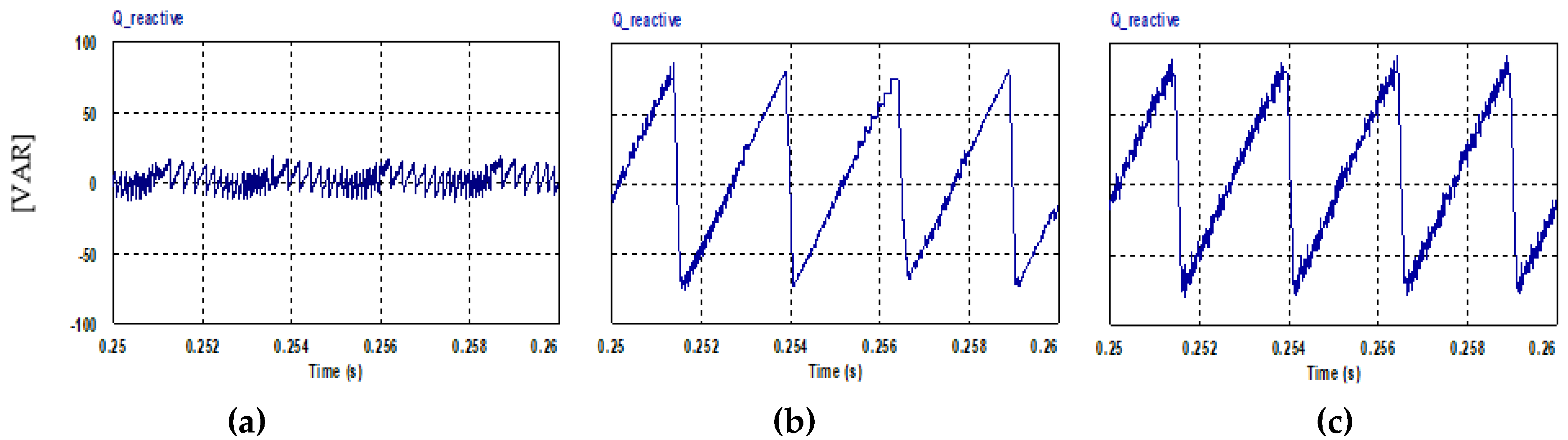
4.1.1. Time-Domain Waveforms
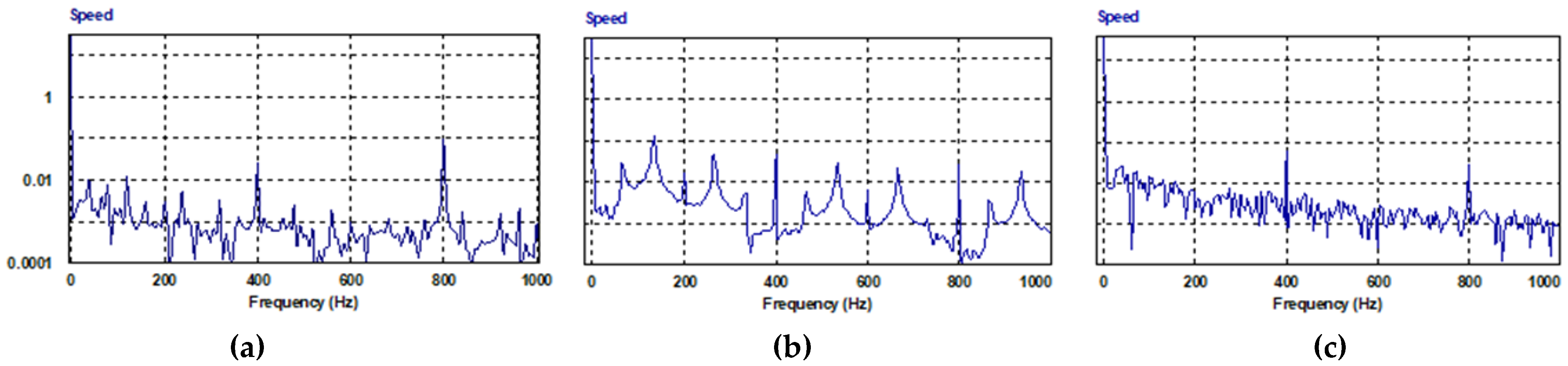
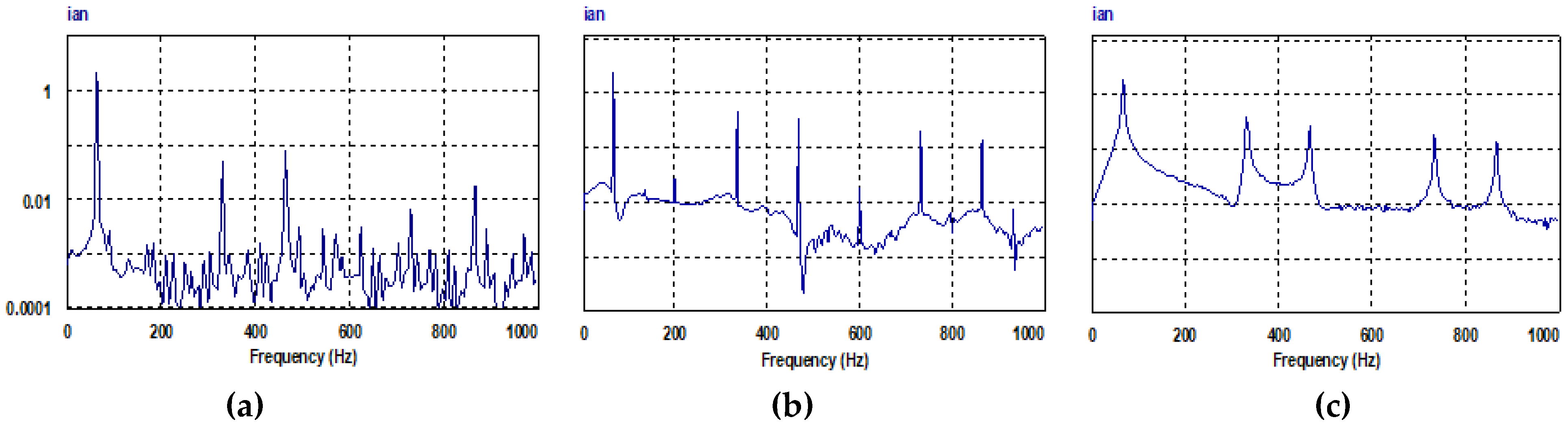
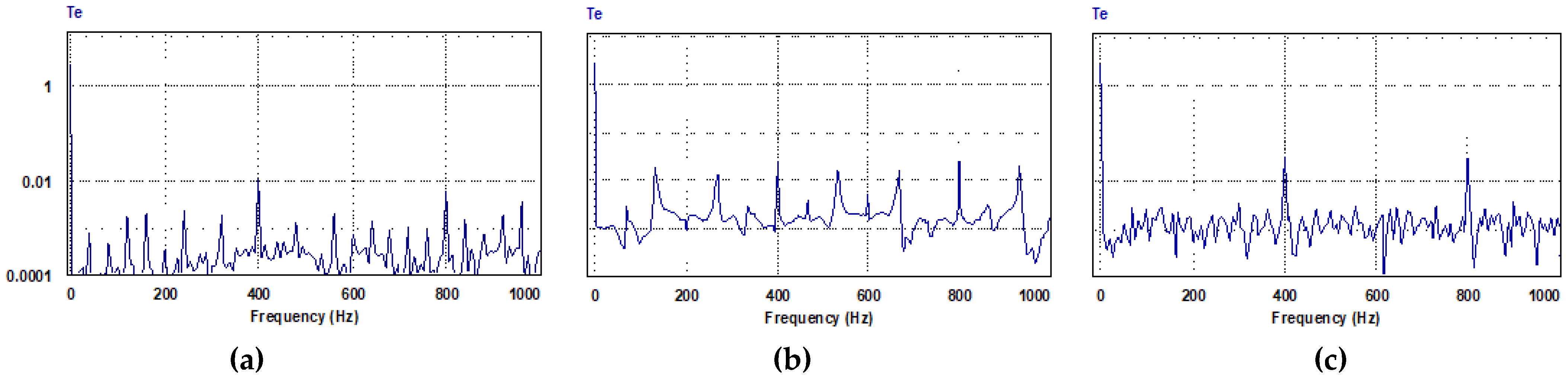
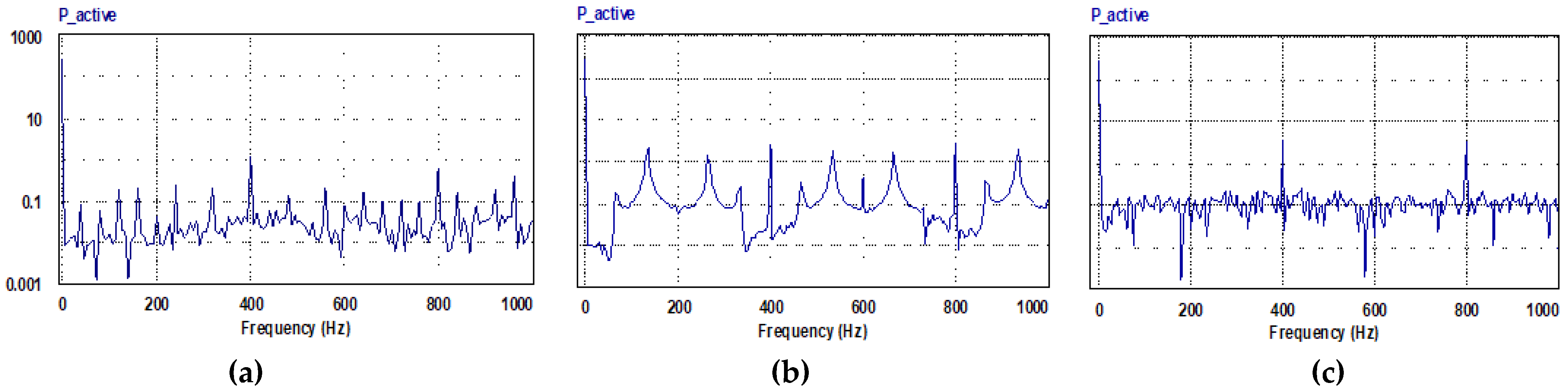
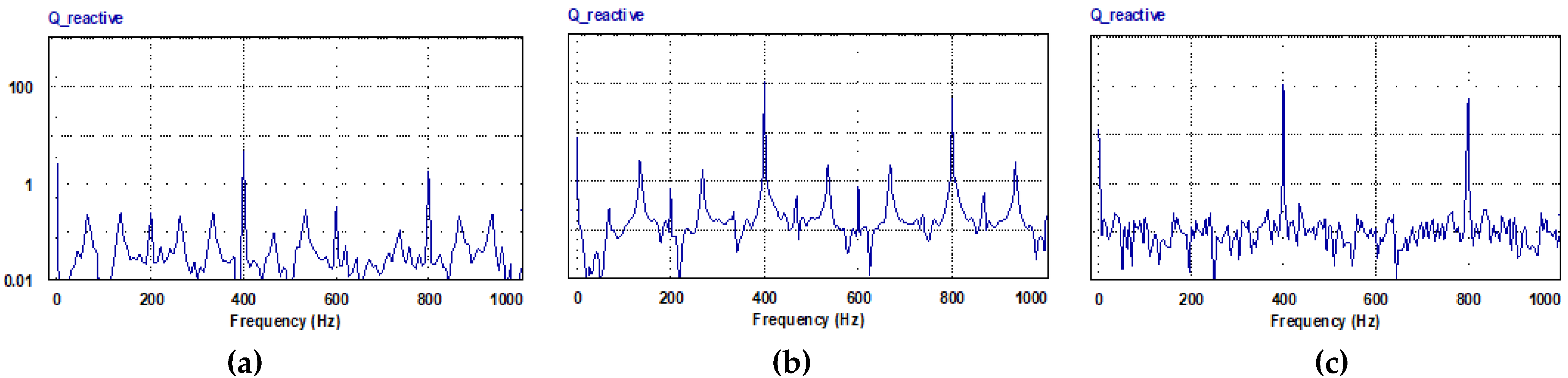
4.1.2. Harmonic Spectra
4.1.3. Quantitative Analysis of the Steady State Results
4.2. Transient Response
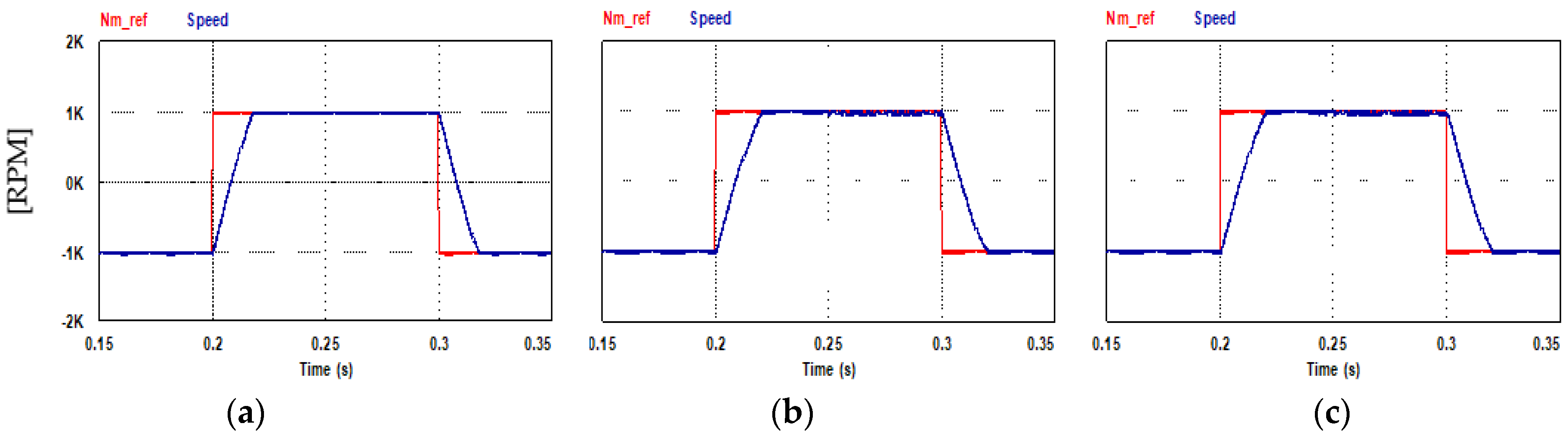
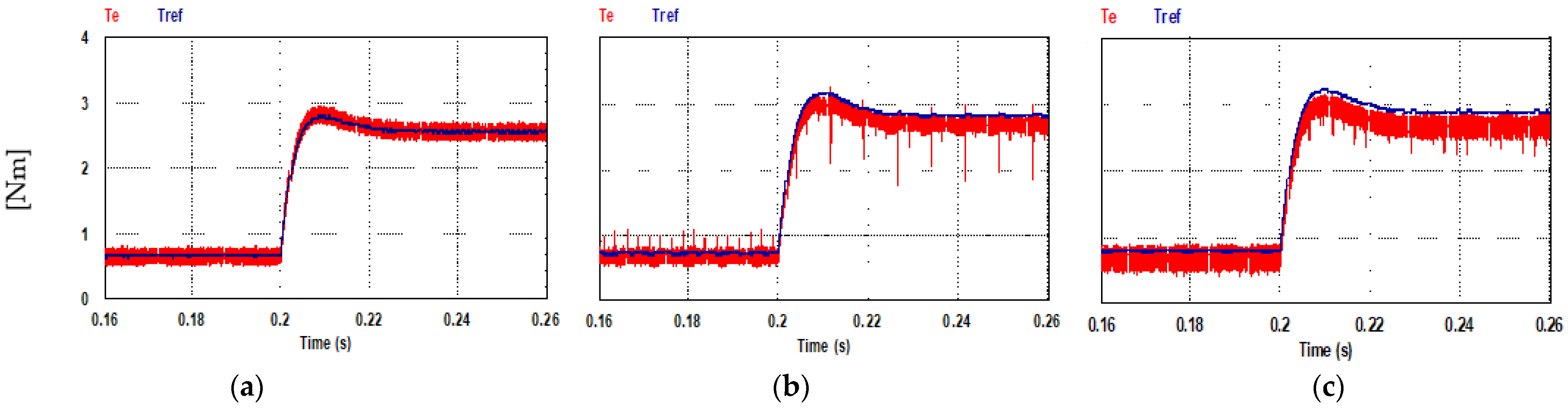
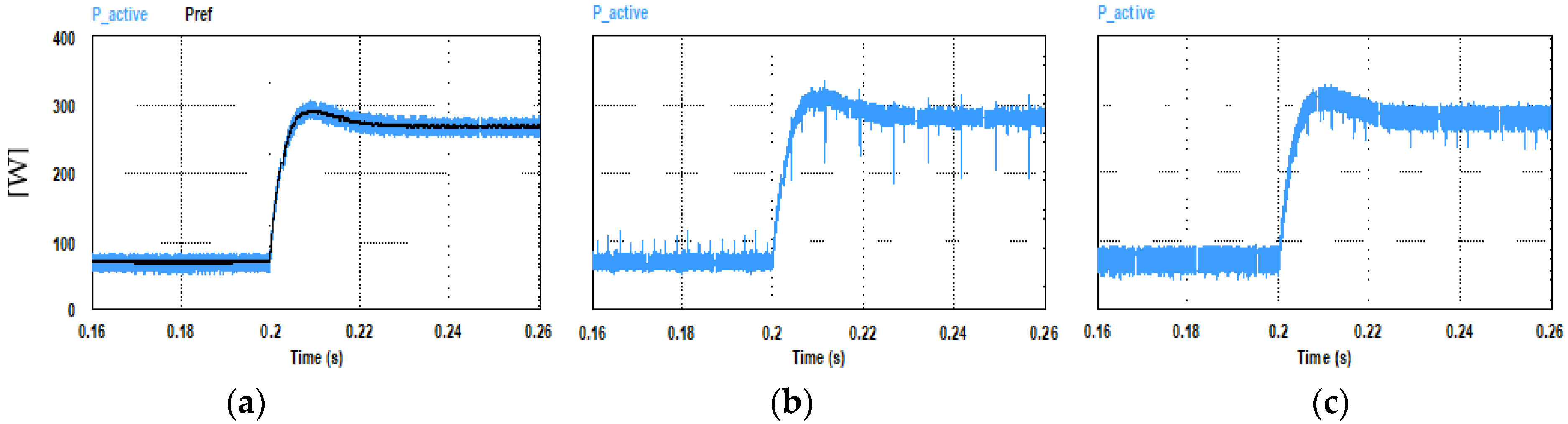
4.2.1. Step Change in the Reference Signal
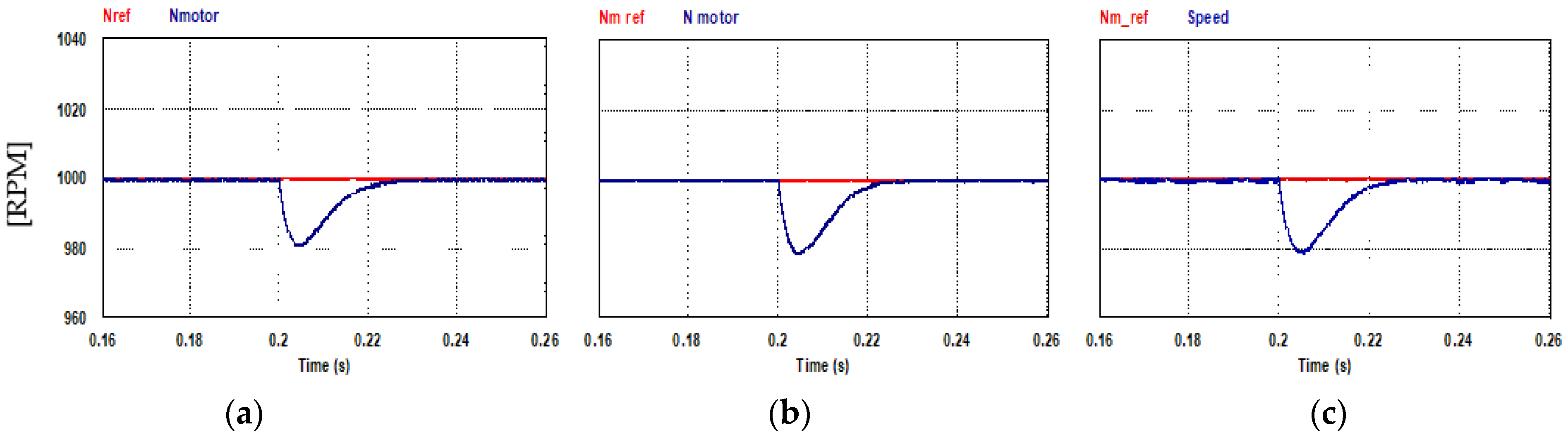
4.2.2. Sudden Load Variation (Step Change)
4.2.3. Quantitative Analysis of the Transient Response
5. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| BLDC | Brushless DC Motor |
| DSP | Digital signal processor |
| DTC | Direct torque control |
| EMF | Electromotive force |
| EV | Electric Vehicles |
| FOC | Field oriented control |
| FCS-MPC | Finite control set model predictive control |
| 3−Φ | Three-Phase |
| HIL | Hardware in the loop |
| MPC | Model predictive control |
| PI | Proportional integral controller |
| SVM | Space vector modulation |
| THD | Total harmonic distortion |
| VSI | Voltage source inverter |
| VAR | Volt-ampere reactive |
Appendix A


References
- Jin, H.; Liu, G.; Li, H.; Chen, B.; Zhang, H. A Fast Commutation Error Correction Method for Sensorless BLDC Motor Considering Rapidly Varying Rotor Speed. IEEE Trans. Ind. Electron. 2022, 69, 3938–3947. [Google Scholar] [CrossRef]
- Jin, H.; Liu, G.; Zheng, S. Commutation Error Closed-Loop Correction Method for Sensorless BLDC Motor Using Hardware-Based Floating Phase Back-EMF Integration. IEEE Trans. Ind. Inform. 2022, 18, 3978–3986. [Google Scholar] [CrossRef]
- Chen, S.; Zhou, X.; Bai, G.; Wang, K.; Zhu, L. Adaptive Commutation Error Compensation Strategy Based on a Flux Linkage Function for Sensorless Brushless DC Motor Drives in a Wide Speed Range. IEEE Trans. Power Electron. 2018, 33, 3752–3764. [Google Scholar] [CrossRef]
- Zhao, D.; Wang, X.; Tan, B.; Xu, L.; Yuan, C.; Huangfu, Y. Fast Commutation Error Compensation for BLDC Motors Based on Virtual Neutral Voltage. IEEE Trans. Power Electron. 2021, 36, 1259–1263. [Google Scholar] [CrossRef]
- Lee, Y. A New Method to Minimize Overall Torque Ripple in the Presence of Phase Current Shift Error for Three-Phase BLDC Motor Drive. Can. J. Electr. Comput. Eng. 2019, 42, 225–231. [Google Scholar] [CrossRef]
- Zhang, H.; Li, H. Fast Commutation Error Compensation Method of Sensorless Control for MSCMG BLDC Motor with Nonideal Back EMF. IEEE Trans. Power Electron. 2021, 36, 8044–8054. [Google Scholar] [CrossRef]
- Jin, H.; Liu, G.; Li, H.; Zhang, H. Closed-Loop Compensation Strategy of Commutation Error for Sensorless Brushless DC Motors with Nonideal Asymmetric Back-EMFs. IEEE Trans. Power Electron. 2021, 36, 11835–11846. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, G.; Zhou, X.; Zheng, S. High-Precision Sensorless Optimal Commutation Deviation Correction Strategy of BLDC Motor with Asymmetric Back EMF. IEEE Trans. Ind. Inform. 2021, 17, 5250–5259. [Google Scholar] [CrossRef]
- Chen, S.; Sun, W.; Wang, K.; Liu, G.; Zhu, L. Sensorless High-Precision Position Correction Strategy for a 100 kW@20 000 r/min BLDC Motor with Low Stator Inductance. IEEE Trans. Ind. Inform. 2018, 14, 4288–4299. [Google Scholar] [CrossRef]
- Wang, L.; Zhu, Z.Q.; Bin, H.; Gong, L. A Commutation Error Compensation Strategy for High-Speed Brushless DC Drive Based on Adaline Filter. IEEE Trans. Ind. Electron. 2021, 68, 3728–3738. [Google Scholar] [CrossRef]
- Li, Y.; Song, X.; Zhou, X.; Huang, Z.; Zheng, S. A Sensorless Commutation Error Correction Method for High-Speed BLDC Motors Based on Phase Current Integration. IEEE Trans. Ind. Inform. 2020, 16, 328–338. [Google Scholar] [CrossRef]
- Ebadpour, M.; Amiri, N.; Jatskevich, J. Fast Fault-Tolerant Control for Improved Dynamic Performance of Hall-Sensor-Controlled Brushless DC Motor Drives. IEEE Trans. Power Electron. 2021, 36, 14051–14061. [Google Scholar] [CrossRef]
- Yang, L.; Zhu, Z.Q.; Gong, L.; Bin, H. PWM Switching Delay Correction Method for High-Speed Brushless DC Drives. IEEE Access 2021, 9, 81717–81727. [Google Scholar] [CrossRef]
- Gu, C.; Wang, X.; Shi, X.; Deng, Z. A PLL-Based Novel Commutation Correction Strategy for a High-Speed Brushless DC Motor Sensorless Drive System. IEEE Trans. Ind. Electron. 2018, 65, 3752–3762. [Google Scholar] [CrossRef]
- Kolano, K. Improved Sensor Control Method for BLDC Motors. IEEE Access 2019, 7, 186158–186166. [Google Scholar] [CrossRef]
- Park, J.S.; Lee, K.-D. Online Advanced Angle Adjustment Method for Sinusoidal BLDC Motors with Misaligned Hall Sensors. IEEE Trans. Power Electron. 2017, 32, 8247–8253. [Google Scholar] [CrossRef]
- Aladsani, A.S.; AlSharidah, M.E.; Beik, O. BLDC Motor Drives: A Single Hall Sensor Method and a 160° Commutation Strategy. IEEE Trans. Energy Convers. 2021, 36, 2025–2035. [Google Scholar] [CrossRef]
- Bae, J.; Lee, D.-H. Position Control of a Rail Guided Mover Using a Low-Cost BLDC Motor. IEEE Trans. Ind. Appl. 2018, 54, 2392–2399. [Google Scholar] [CrossRef]
- Carey, K.D.; Zimmerman, N.; Ababei, C. Hybrid field oriented and direct torque control for sensorless BLDC motors used in aerial drones. IET Power Electron. 2019, 12, 438–449. [Google Scholar] [CrossRef] [Green Version]
- Khazaee, A.; Zarchi, H.A.; Markadeh, G.A.; Hesar, H.M. MTPA Strategy for Direct Torque Control of Brushless DC Motor Drive. IEEE Trans. Ind. Electron. 2021, 68, 6692–6700. [Google Scholar] [CrossRef]
- Buja, G.; Bertoluzzo, M.; Keshri, R. Torque Ripple-Free Operation of PM BLDC Drives with Petal-Wave Current Supply. IEEE Trans. Ind. Electron. 2015, 62, 4034–4043. [Google Scholar] [CrossRef]
- Bosso, A.; Conficoni, C.; Raggini, D.; Tilli, A. A Computational-Effective Field-Oriented Control Strategy for Accurate and Efficient Electric Propulsion of Unmanned Aerial Vehicles. IEEE/ASME Trans. Mechatron. 2021, 26, 1501–1511. [Google Scholar] [CrossRef]
- Masmoudi, M.; El Badsi, B.; Masmoudi, A. Direct Torque Control of Brushless DC Motor Drives with Improved Reliability. IEEE Trans. Ind. Appl. 2014, 50, 3744–3753. [Google Scholar] [CrossRef]
- Huang, C.-L.; Wu, C.-J.; Yang, S.-C. Full-Region Sensorless BLDC Drive for Permanent Magnet Motor Using Pulse Amplitude Modulation with DC Current Sensing. IEEE Trans. Ind. Electron. 2021, 68, 11234–11244. [Google Scholar] [CrossRef]
- Yang, L.; Zhu, Z.Q.; Bin, H.; Zhang, Z.; Gong, L. Virtual Third Harmonic Back EMF-Based Sensorless Drive for High-Speed BLDC Motors Considering Machine Parameter Asymmetries. IEEE Trans. Ind. Appl. 2021, 57, 306–315. [Google Scholar] [CrossRef]
- Chen, S.; Liu, G.; Zhu, L. Sensorless Control Strategy of a 315 kW High-Speed BLDC Motor Based on a Speed-Independent Flux Linkage Function. IEEE Trans. Ind. Electron. 2017, 64, 8607–8617. [Google Scholar] [CrossRef]
- Song, X.; Han, B.; Wang, K. Sensorless Drive of High-Speed BLDC Motors Based on Virtual Third-Harmonic Back EMF and High-Precision Compensation. IEEE Trans. Power Electron. 2019, 34, 8787–8796. [Google Scholar] [CrossRef]
- Xia, K.; Ye, Y.; Ni, J.; Wang, Y.; Xu, P. Model Predictive Control Method of Torque Ripple Reduction for BLDC Motor. IEEE Trans. Magn. 2020, 56, 1–6. [Google Scholar] [CrossRef]
- De Castro, A.G.; Guazzelli, P.R.U.; dos Santos, S.T.C.A.; De Oliveira, C.M.R.; Pereira, W.C.A.; Monteiro, J.R.B.A. Zero Sequence Power Contribution on BLDC Motor Drives. Part II: A FCS-MPC Current Control of Three-Phase Four-Leg Inverter Based Drive. In Proceedings of the 2018 13th IEEE International Conference on Industry Applications (INDUSCON), São Paulo, Brazil, 11–14 November 2018; pp. 1024–1029. [Google Scholar] [CrossRef]
- Darba, A.; De Belie, F.; D’Haese, P.; Melkebeek, J.A. Improved Dynamic Behavior in BLDC Drives Using Model Predictive Speed and Current Control. IEEE Trans. Ind. Electron. 2016, 63, 728–740. [Google Scholar] [CrossRef]
- Wen, H.; Yin, J. A Duty Cycle Based Finite-Set Model Predictive Direct Power Control for BLDC Motor Drives. In Proceedings of the IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020; pp. 821–825. [Google Scholar] [CrossRef]
- Trivedi, M.S.; Keshri, R.K. Evaluation of Predictive Current Control Techniques for PM BLDC Motor in Stationary Plane. IEEE Access 2020, 8, 46217–46228. [Google Scholar] [CrossRef]
- Valle, R.L.; de Almeida, P.M.; Ferreira, A.A.; Barbosa, P.G. Unipolar PWM predictive current-mode control of a variable-speed low inductance BLDC motor drive. IET Electr. Power Appl. 2017, 11, 688–696. [Google Scholar] [CrossRef]
- de Castro, A.G.; Pereira, W.C.D.A.; de Almeida, T.E.P.; de Oliveira, C.M.R.; Monteiro, J.R.B.D.A.; de Oliveira, A.A. Improved Finite Control-Set Model-Based Direct Power Control of BLDC Motor With Reduced Torque Ripple. IEEE Trans. Ind. Appl. 2018, 54, 4476–4484. [Google Scholar] [CrossRef]
- de Castro, A.G.; de Andrade Pereira, W.C.; de Oliveira, C.M.; de Almeida, T.E.; Guazzelli, P.R.; de Almeida Monteiro, J.R.; de Oliveira Junior, A.A. Finite Control-Set Predictive Power Control of BLDC Drive for Torque Ripple Reduction. IEEE Lat. Am. Trans. 2018, 16, 1128–1135. [Google Scholar] [CrossRef]
- Ubare, P.; Ingole, D.; Sonawane, D. Nonlinear Model Predictive Control of BLDC Motor with State Estimation. IFAC-PapersOnLine 2021, 54, 107–112. [Google Scholar] [CrossRef]
- Mohammd Taher, S.; Halvaei Niasar, A.; Abbas Taher, S. A New MPC-based Approach for Torque Ripple Reduction in BLDC Motor Drive. In Proceedings of the 2021 12th Power Electronics, Drive Systems, and Technologies Conference (PEDSTC), Tabriz, Iran, 2–4 February 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Aguirre, M.; Kouro, S.; Rojas, C.A.; Rodriguez, J.; Leno, J.I. Switching Frequency Regulation for FCS-MPC Based on a Period Control Approach. IEEE Trans. Ind. Electron. 2018, 65, 5764–5773. [Google Scholar] [CrossRef]
- Yang, Y.; Wen, H.; Fan, M.; He, L.; Xie, M.; Chen, R.; Norambuena, M.; Rodriguez, J. Multiple-Voltage-Vector Model Predictive Control With Reduced Complexity for Multilevel Inverters. IEEE Trans. Transp. Electrification 2020, 6, 105–117. [Google Scholar] [CrossRef]
- Caseiro, L.M.A.; Mendes, A.M.S.; Cruz, S.M.A. Dynamically Weighted Optimal Switching Vector Model Predictive Control of Power Converters. IEEE Trans. Ind. Electron. 2019, 66, 1235–1245. [Google Scholar] [CrossRef]
- Azab, M. High performance decoupled active and reactive power control for three-phase grid-tied inverters using model predictive control. Prot. Control. Mod. Power Syst. 2021, 6, 25. [Google Scholar] [CrossRef]
- Azab, M. A finite control set model predictive control scheme for single-phase grid-connected inverters. Renew. Sustain. Energy Rev. 2021, 135, 110131. [Google Scholar] [CrossRef]
- Lopez-Santos, O.; Dantonio, D.S.; Flores-Bahamonde, F.; Torres-Pinzón, C.A. Hysteresis Control Methods; Chapter 2; Kabalci, E., Inverters, M., Eds.; Academic Press: Cambridge, MA, USA, 2021; pp. 35–60. [Google Scholar] [CrossRef]
- Aguilera, R.P.; Acuna, P.; Konstantinou, G.; Vazquez, S.; Leon, J.I. Basic Control Principles in Power Electronics: Analog and Digital Control Design; Chapter 2; Blaabjerg, F., Ed.; Control of Power Electronic Converters and Systems, Academic Press: Cambridge, MA, USA, 2018; pp. 31–68. [Google Scholar] [CrossRef]
- Kouzou, A. Power Factor Correction Circuits. In Power Electronics Handbook, 4th ed.; Chapter 16; Rashid, M.H., Ed.; Butterworth-Heinemann: Oxford, UK, 2018; pp. 529–569. [Google Scholar] [CrossRef]
- Naseri, F.; Farjah, E.; Schaltz, E.; Lu, K.; Tashakor, N. Predictive Control of Low-Cost Three-Phase Four-Switch Inverter-Fed Drives for Brushless DC Motor Applications. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 1308–1318. [Google Scholar] [CrossRef]
- de Almeida, P.M.; Valle, R.L.; Barbosa, P.G.; Montagner, V.F.; Cuk, V.; Ribeiro, P.F. Robust Control of a Variable-Speed BLDC Motor Drive. IEEE J. Emerg. Sel. Top. Ind. Electron. 2021, 2, 32–41. [Google Scholar] [CrossRef]
- Baszynski, M.; Pirog, S. Unipolar Modulation for a BLDC Motor with Simultaneously Switching of Two Transistors with Closed Loop Control for Four-Quadrant Operation. IEEE Trans. Ind. Inform. 2018, 14, 146–155. [Google Scholar] [CrossRef]
- Gonzalez, J.J.; Montañez, F.G.; Mondragon, V.M.J.; Liceaga-Castro, J.U.; Escarela-Perez, R.; Olivares-Galvan, J.C. Parameter Identification of BLDC Motor Using Electromechanical Tests and Recursive Least-Squares Algorithm: Experimental Validation. Actuators 2021, 10, 143. [Google Scholar] [CrossRef]
- Xia, C.-L. Permanent Magnet Brushless DC Motor Drives and Controls; John Wiley & Sons: Singapore; Pte. Ltd.: Solaris, Singapore, 2012; ISBN 978-1-118-18833-0. [Google Scholar]
- Maharajan, M.P.; Xavier, S.A.E. Design of Speed Control and Reduction of Torque Ripple Factor in BLdc Motor Using Spider Based Controller. IEEE Trans. Power Electron. 2019, 34, 7826–7837. [Google Scholar] [CrossRef]
- Krykowski, K.; Hetmańczyk, J. Constant Current Models of Brushless DC Motor. Electr. Control Commun. Eng. 2013, 3, 19–24. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Simulation Platform | PSIM |
| MPC Sampling time TS | 10–20 μs |
| Motor phase resistance RS | 10 Ω |
| Equivalent phase inductance LS | 6 mH |
| Back-EMF constant | 0.2 V/rpm |
| Motor poles | 8 |
| Moment of inertia | 0.0005 kgm2 |
| Item | Parameter | Value | ||||
|---|---|---|---|---|---|---|
| DPC FCS-MPC | CC FCS-MPC | Hysteresis CC | ||||
| Motor Speed [RPM] | Reference Value | Nref | 1000 | 1000 | 1000 | |
| Worst values | Max. | Nmax | 1000.16 | 1000.22 | 1000.19 | |
| Min. | Nmin | 999.84 | 999.53 | 999.72 | ||
| Average | Navg | 1000 | 999.99 | 999.99 | ||
| % Speed Error | 100 × (Nmax − Nmin)/Nref | 0.032 | 0.069 | 0.047 | ||
| Developed Torque [N.m] | Average Torque | Tag | 2.58 | 2.69 | 2.70 | |
| Worst values | Max. | Tmax | 2.72 | 2.98 | 2.89 | |
| Min. | Tmin | 2.44 | 1.82 | 2.27 | ||
| % Peak-Peak Ripple | 100 × (Tmax − Tmin)/Tavg | 10.85 | 43.12 | 22.96 | ||
| Active Power [W] | Average Power | Pavg | 270.51 | 282.39 | 282.86 | |
| Worst values | Max. | Pmax | 285.29 | 313.03 | 303.33 | |
| Min. | Pmin | 255.68 | 190.32 | 238.18 | ||
| % Peak-Peak ripple | 100 × (Pmax − Pmin)/Pavg | 10.94 | 43.45 | 23.03 | ||
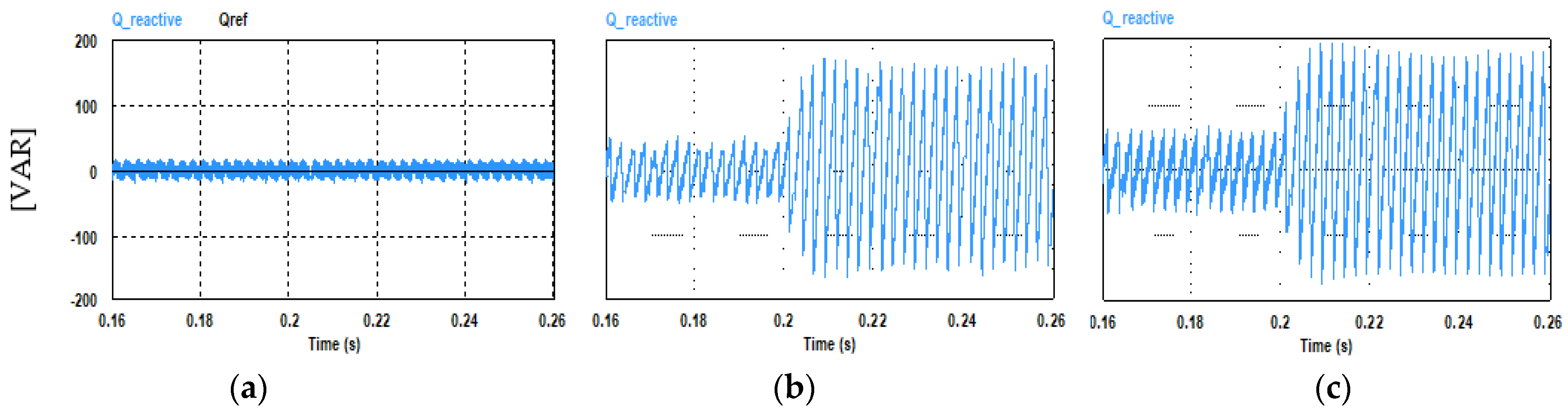
| Reactive Power [VAR] | Average Value | QAVG | 2.39 | 8.21 | 12.33 | |
| Worst Values | Max. | Qmax | 19.93 | 171.56 | 183.94 | |
| Min. | Qmin | −14.44 | −151.26 | −158.50 | ||
| Peak-Peak Ripple | ΔQ = (Qmax − Qmin) | 34.37 | 322.82 | 342.44 | ||
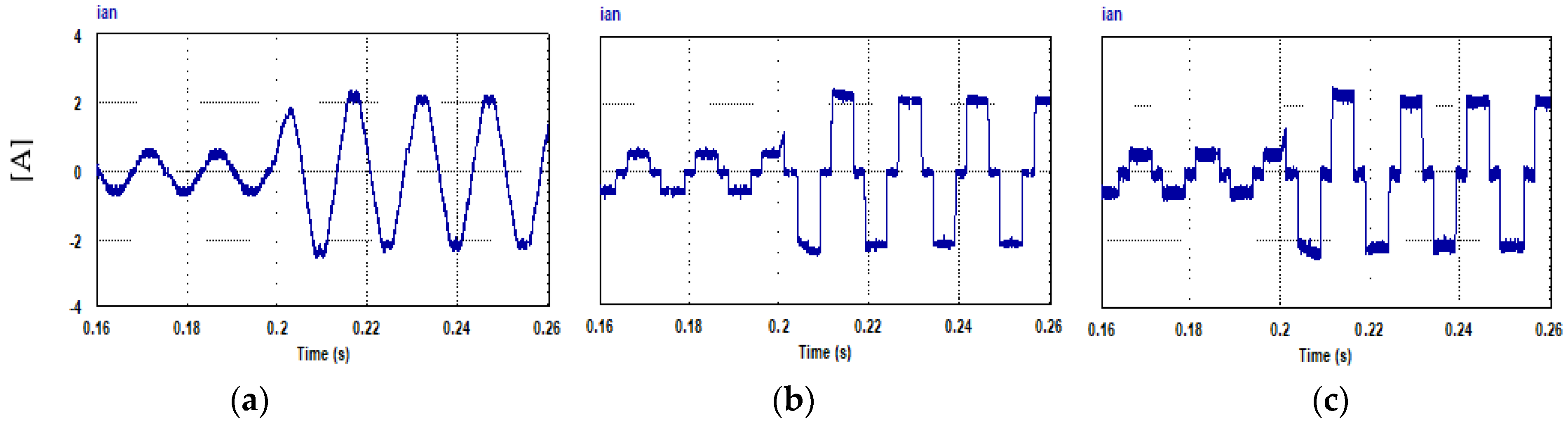
| Stator Current [A] | RMS Value | Irms | 1.586 | 1.721 | 1.733 | |
| Peak of 1st Harmonic | I1 peak | 1.869 | 1.937 | 1.938 | ||
| % Total Harm. Dist. | THD | 9.09 | 28.98 | 30.60 | ||
| Item | Parameter | Value | |||
|---|---|---|---|---|---|
| DPC FCS-MPC | CC FCS-MPC | Hysteresis CC | |||
| Motor Speed [rpm] | Reference Value | Nref | 1000 | 1000 | 1000 |
| Amplitudes of the worst low order harmonics | 2nd order | --- | 0.135 | --- | |
| 4th | --- | 0.0466 | --- | ||
| 6th order | 0.0256 | 0.0468 | 0.064 | ||
| Line-Line voltage [V] | Amplitude of 1st harmonic | 1st order | 214.23 | 215.88 | 210.91 |
| Amplitudes of the worst low order harmonics | 5th order | 32.71 | 23.73 | 21.12 | |
| 7th order | 26.06 | 17.48 | 17.98 | ||
| 11th order | 12.97 | 23.84 | 27.89 | ||
| Developed Torque [N.m] | Amplitudes of the worst low order harmonics | 2nd order | --- | 0.02 | --- |
| 4th order | --- | 0.014 | --- | ||
| 6th order | 0.0105 | 0.027 | 0.0348 | ||
| 12th order | 0.0062 | 0.025 | 0.0317 | ||
| Active Power [W] | Amplitudes of the worst low order harmonics | 2nd order | --- | 2.21 | --- |
| 4th order | --- | 1.43 | --- | ||
| 6th order | 1.10 | 2.87 | 3.64 | ||
| 8th order | --- | 1.84 | --- | ||
| 12th order | 0.632 | 2.66 | 3.32 | ||
| Reactive Power [VAR] | Amplitudes of the worst low order harmonics | 6th order | 4.37 | 106.41 | 110.03 |
| 12th order | 1.25 | 49.03 | 51.69 | ||
| 18th order | 0.587 | 32.10 | 33.81 | ||
| Stator Current [A] | RMS Value | Irms | 1.586 | 1.721 | 1.733 |
| Amplitude of 1st harmonic | I1peak | 1.869 | 1.937 | 1.938 | |
| % Total Harmonic Distor. | THD | 9.09 | 28.98 | 30.60 | |
| Amplitudes of the worst low order harmonics | 5th order | 0.050 | 0.392 | 0.40 | |
| 7th order | 0.069 | 0.268 | 0.28 | ||
| 11th order | 0.0058 | 0.175 | 0.186 | ||
| Mode of Operation | Parameter | Value | ||
|---|---|---|---|---|
| DPC FCS-MPC | CC FCS-MPC | Hysteresis CC | ||
| Step change in mechanical load (TLoad = 0 → 2.5 N·m) (No =1000 rpm) | Load rejection time [ms] | 35 | 31 | 32 |
| Max dip in speed [rpm] | 19 | 21.1 | 21 | |
| Percentage of speed dip [%] | 1.91 | 2.11 | 2.1 | |
| Step change in reference speed (−1000 → 1000 RPM) | Settling time [ms] | 32.5 | 40.4 | 39.9 |
| Peak overshoot [rpm] | 2 | 14.3 | 6.2 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Azab, M. Comparative Study of BLDC Motor Drives with Different Approaches: FCS-Model Predictive Control and Hysteresis Current Control. World Electr. Veh. J. 2022, 13, 112. https://doi.org/10.3390/wevj13070112
Azab M. Comparative Study of BLDC Motor Drives with Different Approaches: FCS-Model Predictive Control and Hysteresis Current Control. World Electric Vehicle Journal. 2022; 13(7):112. https://doi.org/10.3390/wevj13070112
Chicago/Turabian StyleAzab, Mohamed. 2022. "Comparative Study of BLDC Motor Drives with Different Approaches: FCS-Model Predictive Control and Hysteresis Current Control" World Electric Vehicle Journal 13, no. 7: 112. https://doi.org/10.3390/wevj13070112
APA StyleAzab, M. (2022). Comparative Study of BLDC Motor Drives with Different Approaches: FCS-Model Predictive Control and Hysteresis Current Control. World Electric Vehicle Journal, 13(7), 112. https://doi.org/10.3390/wevj13070112