Platooning of Autonomous Public Transport Vehicles: The Influence of Ride Comfort on Travel Delay

 , , , ,
, , , , 
Abstract
:1. Introduction
2. Literature Review
3. Materials and Methods
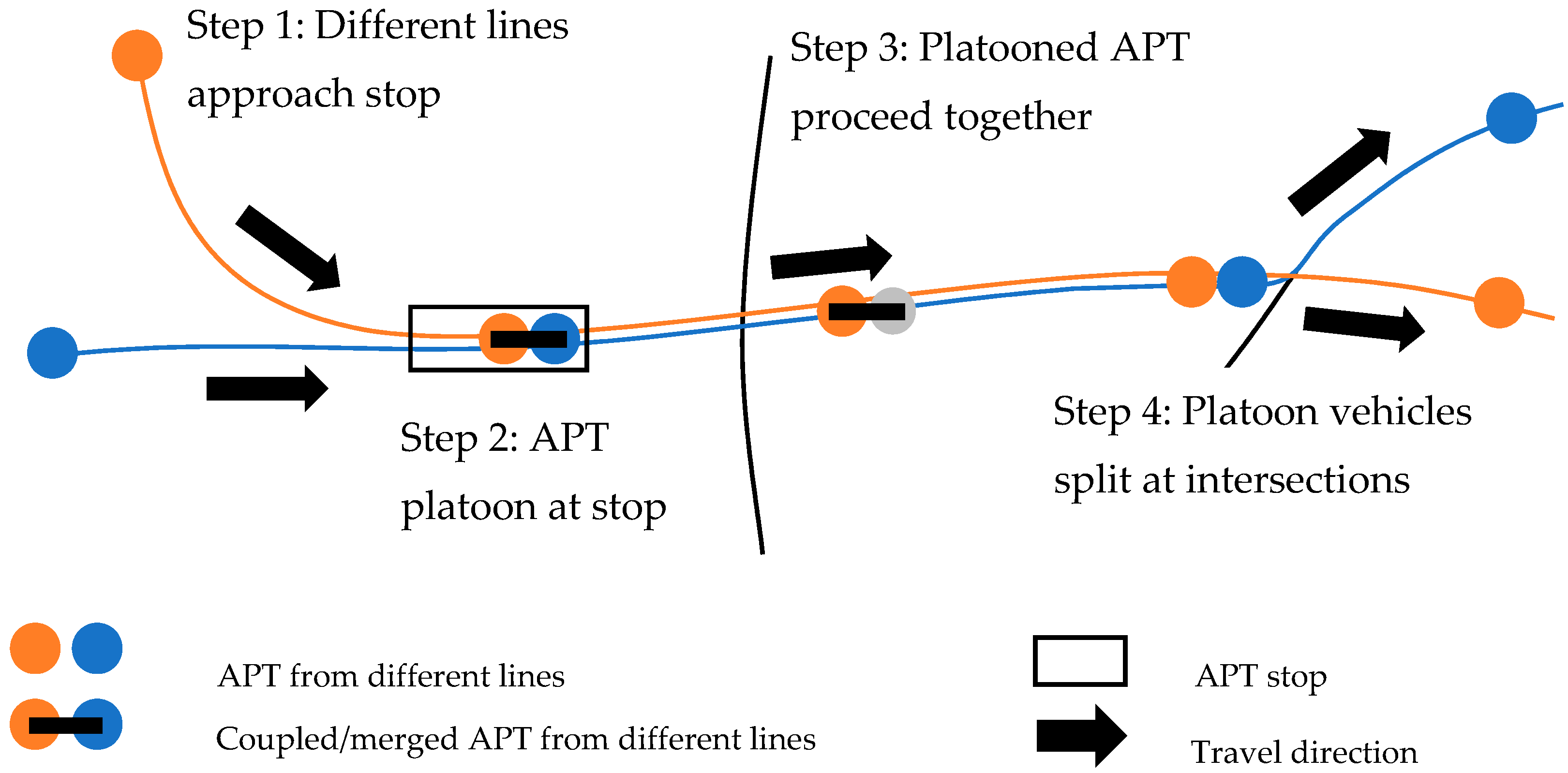
3.1. Development of Coupling/Decoupling Protocol Based on EDM
3.2. The Effects of Ride Comfort Criteria on DART Performance
4. Results and Discussion
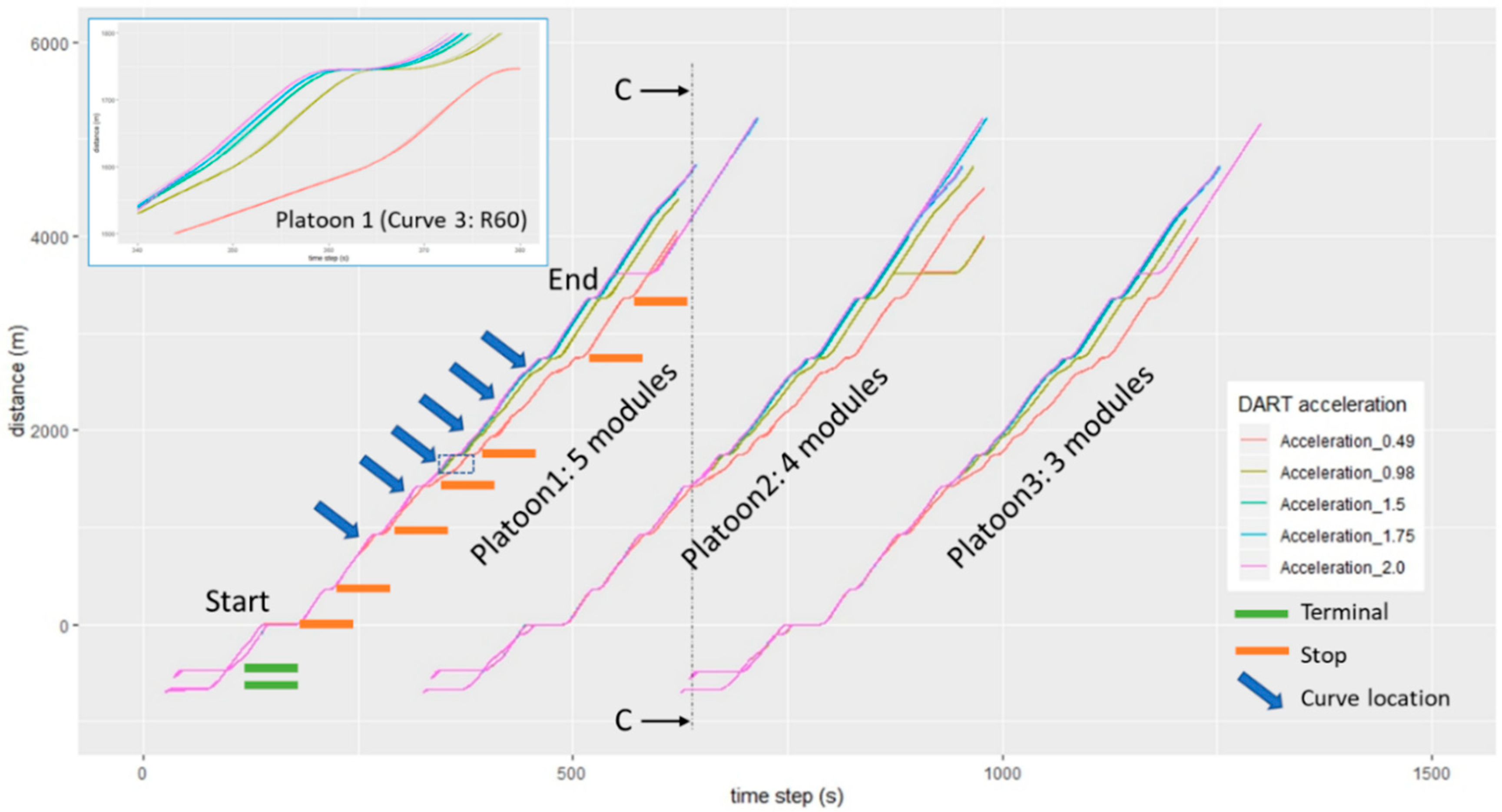
4.1. Platooning Behaviors and Trajectories
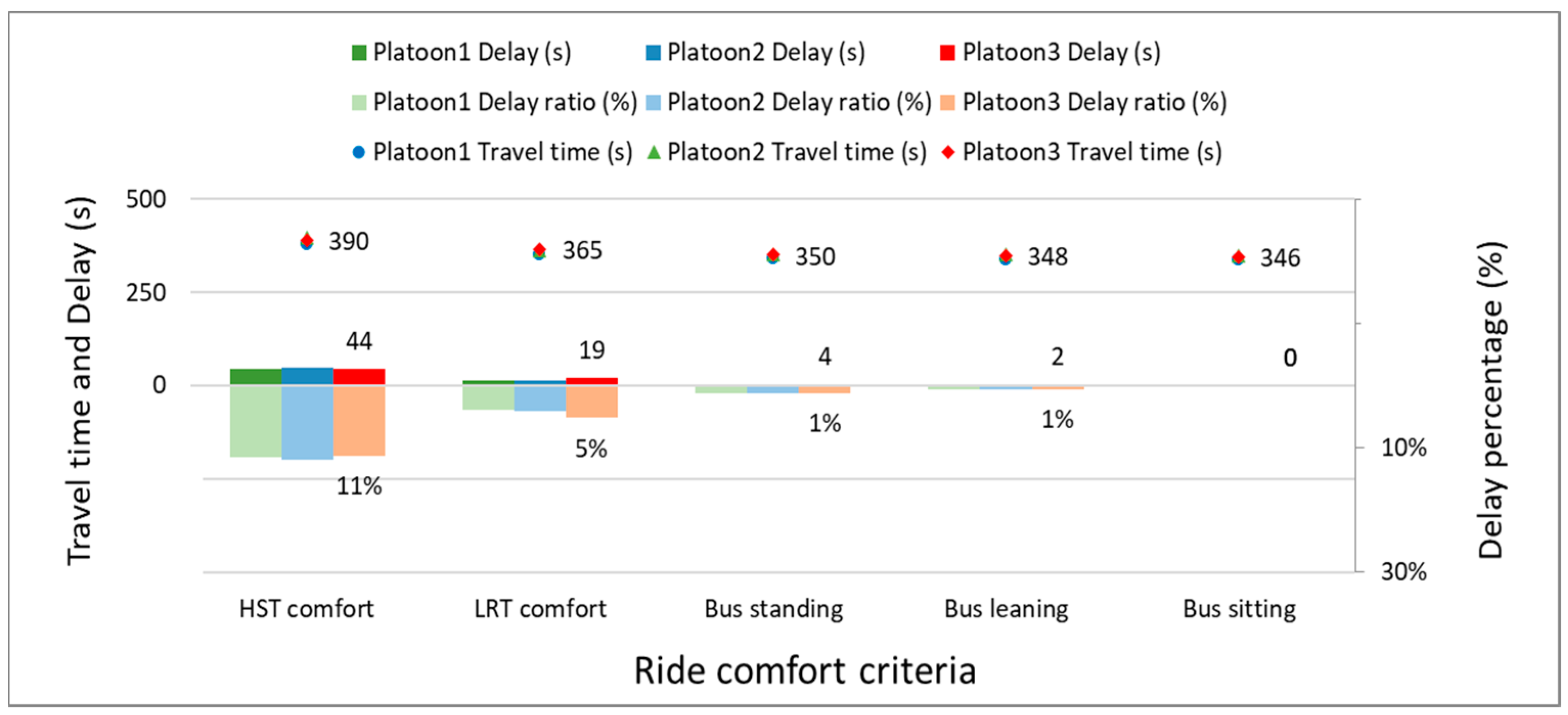
4.2. Travel Time and Delay of DART Platoons
- Firstly, the simulation scenarios allow to ideally prioritize the merged-platoons from start-to-end to improve travel speed and reduce travel time, but the delay impact on private cars have not been evaluated. This delay can be quite severe, as there can be a long waiting time for the whole APT platoon to pass by, especially during peak hours or in case of longer merged platoons e.g., of 10 modules. The trade-off is now expanding to private car drivers’ perceptions and the whole network performance for both APT and private cars, which is more challenging to solve.
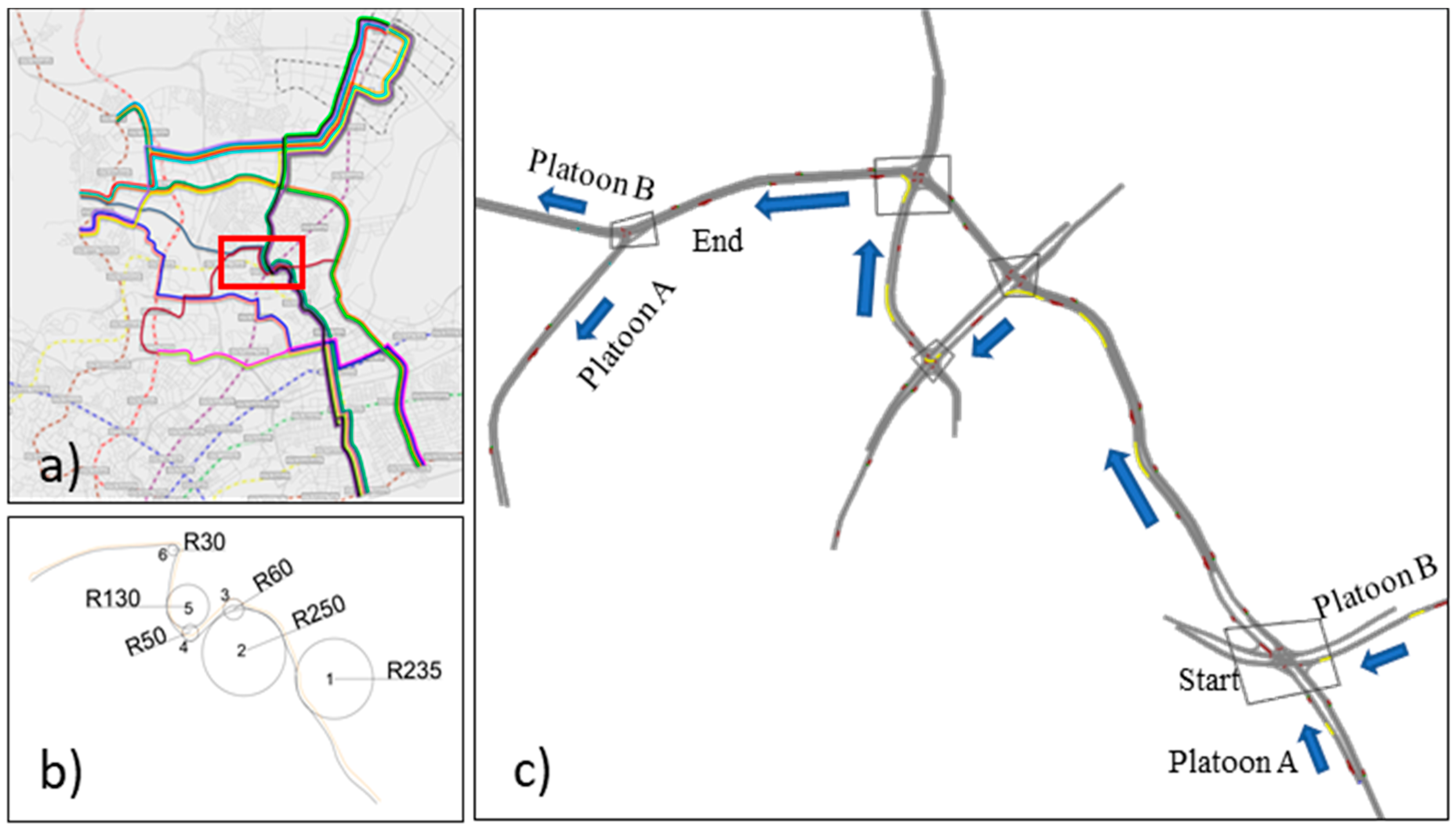
- Secondly, due to a single operational corridor in this study, the delay investigation is not comprehensive. A more extensive network with multiple lines practicing coupling and decoupling, and traffic demand inputs are worth investigating for further study. It is noted that the planned DART network includes 18 lines with vast and complicated coupling/decoupling process across these lines. The performance issues may happen and deteriorate the whole system’s reliability when the number of modules within each platoon, the number of APT lines and the network are scaled up.
- Moreover, the effect of road excitation on passenger comfort, which is also an important influencing factor, has not been considered. For the urban bus, air-suspension is often equipped to maintain the high comfort levels at a lower natural frequency as well as the kneeling function by modifying the internal pressure [51]. It is of utmost crucial importance for passengers on APT/AB (also AV) to enjoy their activities onboard, meaning a smoother road surface is required as compared to the conventional bus system. The bus ride index [52] can be one of the potential solutions to solve this problem.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kyriakidis, M.; Happee, R.; De Winter, J.C.F. Public opinion on automated driving: Results of an international questionnaire among 5000 respondents. Transp. Res. Part F Traffic Psychol. Behav. 2015, 32, 127–140. [Google Scholar] [CrossRef]
- Miao, C.; Liu, H.; Zhu, G.G.; Chen, H. Connectivity-based optimization of vehicle route and speed for improved fuel economy. Transp. Res. Part C Emerg. Technol. 2018, 91, 353–368. [Google Scholar] [CrossRef]
- Pudāne, B.; Rataj, M.; Molin, E.J.E.; Mouter, N.; van Cranenburgh, S.; Chorus, C.G. How will automated vehicles shape users’ daily activities? Insights from focus groups with commuters in the Netherlands. Transp. Res. Part D Transp. Environ. 2019, 71, 222–235. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M.; Singh, A. Assessing public opinions of and interest in new vehicle technologies: An Austin perspective. Transp. Res. Part C Emerg. Technol. 2016, 67, 1–14. [Google Scholar] [CrossRef]
- Pudāne, B.; Molin, E.J.E.; Arentze, T.A.; Maknoon, Y.; Chorus, C.G. A time-use model for the automated vehicle-era. Transp. Res. Part C Emerg. Technol. 2018, 93, 102–114. [Google Scholar] [CrossRef]
- Fahmy, T. Dubai Tests Autonomous Pods in Drive for Smart City. Available online: https://www.reuters.com/article/us-emirates-transportation-autonomous/dubai-tests-autonomous-pods-in-drive-for-smart-city-idUSKCN1GD5G6 (accessed on 22 April 2019).
- Maiti, S.; Winter, S.; Kulik, L. A conceptualization of vehicle platoons and platoon operations. Transp. Res. Part C Emerg. Technol. 2017, 80, 1–19. [Google Scholar] [CrossRef]
- Larsson, E.; Sennton, G.; Larson, J. The vehicle platooning problem: Computational complexity and heuristics. Transp. Res. Part C Emerg. Technol. 2015, 60, 258–277. [Google Scholar] [CrossRef] [Green Version]
- Rau, A.; Tian, L.; Jain, M.; Xie, M.; Liu, T. Autonomous road transit (DART) for use-case capacity more than bus. In Proceedings of the mobil.TUM 2018 “Urban Mobility—Shaping the Future Together”—International Scientific Conference on Mobility and Transport, Munich, Germany, 13–14 June 2018. [Google Scholar]
- Liu, T.; Ceder, A.A.; Rau, A. Scheduled platoons of public transport autonomous modular vehicles. In Proceedings of the 7th Symposium of the European Association for Research in Transportation (hEART2018), Athens, Greece, 5–7 September 2018. [Google Scholar]
- Tao, L.; Avishai, C.; Rau, A. Public transit fleet size models of single-line autonomous modular system. In Proceedings of the 98th TRB Annual Meeting, Washington, DC, USA, 13–17 January 2019. [Google Scholar]
- Liu, T.; Avi, A.; Andreas, C. Deployment planning of single-line modular-vehicle semi- rapid transit system. In Proceedings of the Conference on Advanced Systems in Public Transport and TransitData, Brisbane, Australia, 23–25 July 2018. [Google Scholar]
- Radcliffe, D. Driverless Air Taxis, Drones, Pods: Dubai Puts Future Tech at Heart of Transportation. Available online: https://www.zdnet.com/article/driverless-air-taxis-drones-pods-dubai-puts-future-tech-at-heart-of-transportation/ (accessed on 22 April 2019).
- Debusmann, B. World’s First Autonomous Pods Unveiled in Dubai. Available online: https://www.arabianbusiness.com/transport/389656-worlds-first-autonomous-pods-unveiled-in-dubai (accessed on 22 April 2019).
- De Almeida Correia, G.H.; Wiegmans, B.; Kockelman, K.; Qiang, M. Editorial of the TR Part C special issue on: “Operations with automated vehicles (AVs): Applications in freight and passenger transport”. Transp. Res. Part C Emerg. Technol. 2018, 95, 493–496. [Google Scholar] [CrossRef]
- Bassani, M.; Dalmazzo, D.; Marinelli, G.; Cirillo, C. The effects of road geometrics and traffic regulations on driver-preferred speeds in northern Italy. An exploratory analysis. Transp. Res. Part F Traffic Psychol. Behav. 2014, 25, 10–26. [Google Scholar] [CrossRef]
- Nguyen, T.; NguyenDinh, N.; Lechner, B.; Wong, Y.D. Insight into the lateral ride discomfort of young-adult bus passengers at multiple postures: Case of Singapore. Case Stud. Transp. Policy 2019. [Google Scholar] [CrossRef]
- Kyriakidis, M.; de Winter, J.C.; Stanton, N.; Bellet, T.; van Arem, B.; Brookhuis, K.; Martens, M.H.; Bengler, K.; Andersson, J.; Merat, N.; et al. A human factors perspective on automated driving. Theor. Issues Ergon. Sci. 2019, 20, 223–249. [Google Scholar] [CrossRef]
- Lam, S.; Katupitiya, J. Modeling and control of a platoon of autonomous buses. In Proceedings of the IEEE Intelligent Vehicles Symposium, Gold Coast, Australia, 23–26 June 2013; pp. 958–963. [Google Scholar]
- Ginn, M.; Amuna, F.; Colmenares, J.E.; Stewart, A.; Diong, B.; Wang, Y.; Yang, J. Conceptual design and prototyping of a slim semi-autonomous bus rapid transit vehicle. In Proceedings of the IEEE SoutheastCon, Charlotte, NC, USA, 30 March–2 April 2017; pp. 1–6. [Google Scholar]
- Zhang, W.; Jenelius, E.; Badia, H. Efficiency of semi-autonomous and fully autonomous bus services in trunk-and-branches networks. J. Adv. Transp. 2019, 1–17. [Google Scholar] [CrossRef]
- Cao, Z.; Ceder, A. Autonomous shuttle bus service timetabling and vehicle scheduling using skip-stop tactic. Transp. Res. Part C Emerg. Technol. 2019, 102, 370–395. [Google Scholar] [CrossRef]
- Montes, H.; Salinas, C.; Fernández, R.; Armada, M. An experimental platform for autonomous bus development. Appl. Sci. 2017, 7, 1131. [Google Scholar] [CrossRef]
- Yu, L.; Kong, D.; Yan, X. A driving behavior planning and trajectory generation method for autonomous electric bus. Future Internet 2018, 10. [Google Scholar] [CrossRef]
- Bhoopalam, A.K.; Agatz, N.; Zuidwijk, R. Planning of truck platoons: A literature review and directions for future research. Transp. Res. Part B Methodol. 2018, 107, 212–228. [Google Scholar] [CrossRef] [Green Version]
- Salonen, A.O. Passenger’s subjective traffic safety, in-vehicle security and emergency management in the driverless shuttle bus in Finland. Transp. Policy 2018, 61, 106–110. [Google Scholar] [CrossRef]
- Portouli, E.; Karaseitanidis, G.; Lytrivis, P.; Amditis, A.; Raptis, O.; Karaberi, C. Public attitudes towards autonomous mini buses operating in real conditions in a Hellenic city. In Proceedings of the IEEE Intelligent Vehicles Symposium, Los Angeles, CA, USA, 11–14 June 2017. [Google Scholar] [CrossRef]
- Le Vine, S.; Zolfaghari, A.; Polak, J. Autonomous cars: The tension between occupant experience and intersection capacity. Transp. Res. Part C Emerg. Technol. 2015, 52, 1–14. [Google Scholar] [CrossRef]
- Parsons Brinckerhoff, I. Transit Cooperative Research Program Report #155: Track Design Handbook for Light Rail Transit, 2nd ed.; Transportation Research Board: Washington, DC, USA, 2012. [Google Scholar]
- Parsons Brinckerhoff, I. Technical Memorandum: Alignment Design Standards for High-Speed Train Operation; California High-Speed Rail Authority: Sacramento, CA, USA, 2009.
- Shu, H.B.; Shao, Y.M.; Lin, W.; Xu, J. Computation-based dynamic driving simulation for evaluation of mountain roads with complex shapes: A case study. Procedia Eng. 2016, 137, 210–219. [Google Scholar] [CrossRef]
- Xu, J.; Yang, K.; Shao, Y.; Lu, G. An experimental study on lateral acceleration of cars in different environments in Sichuan, Southwest China. Discret. Dyn. Nat. Soc. 2015, 2015, 494130. [Google Scholar] [CrossRef]
- He, Y.; Yan, X.; Wu, C.; Chu, D.; Peng, L. Effects of driver’s unsafe acceleration behaviors on passengers’ comfort for coach buses. In ICTIS 2013: Improving Multimodal Transportation Systems-Information, Safety, and Integration, Proceedings of the Second International Conference on Transportation Information and Safety (ICTIS), Wuhan, China, 29 June–2 July 2013; American Society of Civil Engineers: Reston, VA, USA, 2013. [Google Scholar] [CrossRef]
- Beurier, G. Analysis of the discomfort feeling of standing bus passengers on the TEOR T1 Rouen bus lane. Procedia Soc. Behav. Sci. 2012, 48, 425–434. [Google Scholar] [CrossRef]
- AASHTO. A Policy on Geometric Design of Highways and Streets, 6th ed.; American Association of State Highway and Transportation Officials: Washington, DC, USA, 2011. [Google Scholar]
- ARUP. Guided Busway Design Handbook; The British Cementitous Paving Association: Wokingham, UK, 2017. [Google Scholar]
- Salgado, D.; Jolovic, D.; Martin, P.T.; Aldrete, R.M. Traffic microsimulation models assessment—A case study of international land port of entry. Procedia Comput. Sci. 2016, 83, 441–448. [Google Scholar] [CrossRef]
- Nguyen, T.; NguyenDinh, N.; Lechner, B. Traffic microsimulation of roadwork in Singapore, a case study. In Proceedings of the 2nd Conference on Transport Infrastructure with Sustainable Development, Danang, Vietnam, 17–18 September 2016. [Google Scholar]
- NguyenDinh, N.; Nguyen, T.; Yang, E.H.; Lechner, B. Life cycle cost assessment of engineered cementitious composite (ECC) precast pavement in Singapore. In Proceedings of the 11th International Conference on Concrete Pavements, San Antonio, TX, USA, 28 August–1 September 2016. [Google Scholar]
- Li, Z.; Chitturi, M.V.; Zheng, D.; Bill, A.R.; Noyce, D.A. Modeling reservation-based autonomous intersection control in Vissim. Transp. Res. Rec. J. Transp. Res. Board 2013, 2381, 81–90. [Google Scholar] [CrossRef]
- Zhong, Z. Assessing the Effectiveness of Managed Lane Strategies for the Rapid Deployment of Cooperative Adaptive Cruise Control Technology. Ph.D. Thesis, New Jersey Institute of Technology, Newark, NJ, USA, 2018. [Google Scholar]
- Duret, A.; Wang, M.; Ladino, A. A hierarchical approach for splitting truck platoons near network discontinuities. Transp. Res. Part B Methodol. 2019. [Google Scholar] [CrossRef]
- Sethuraman, G.; Liu, X.; Bachmann, F.R.; Xie, M.; Ongel, A.; Busch, F. Effects of bus platooning in an urban environment. In Proceedings of the 22nd IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019. [Google Scholar]
- Kesting, A.; Treiber, M.; Schönhof, M.; Helbing, D. Adaptive cruise control design for active congestion avoidance. Transp. Res. Part C Emerg. Technol. 2008, 16, 668–683. [Google Scholar] [CrossRef]
- Kesting, A.; Treiber, M.; Helbing, D. Enhanced intelligent driver model to access the impact of driving strategies on traffic capacity. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2010, 368, 4585–4605. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shirazinejad, R.S.; Al-Bayati, A.J. Impact of advertising signs on freeway crashes within a certain distance in Michigan. In Proceedings of the Construction Research Congress 2018, New Orleans, LA, USA, 2–4 April 2018; pp. 698–705. [Google Scholar] [CrossRef]
- Bassani, M.; Marinelli, G.; Piras, M. Identification of horizontal circular arc from spatial data sources. J. Surv. Eng. 2016, 142, 1–14. [Google Scholar] [CrossRef]
- Marinelli, G.; Bassani, M.; Piras, M.; Lingua, A.M. Mobile mapping systems and spatial data collection strategies assessment in the identification of horizontal alignment of highways. Transp. Res. Part C Emerg. Technol. 2017, 79, 257–273. [Google Scholar] [CrossRef] [Green Version]
- Mitchell, D.; Claris, S.; Edge, D. Human-centered mobility: A new approach to designing and improving our urban transport infrastructure. Engineering 2016, 2, 33–36. [Google Scholar] [CrossRef]
- Bogren, L.; Fallman, D.; Henje, C. User-centered inclusive design: Making public transport accessible. In Proceedings of the International Conference on Inclusive Design–Royal College of Art, London, UK, 5–8 April 2009. [Google Scholar]
- Kowarska, I.; Korta, J.; Kuczek, K.; Uhl, T. Fully equipped dynamic model of a bus. Shock Vib. 2014, 2014, 201952. [Google Scholar] [CrossRef]
- Nguyen, T.; Lechner, B.; Wong, Y.D.; Tan, J.Y. Bus ride index—A refined approach to evaluate road surface irregularities. Road Mater. Pavement Des. 2019. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source | Longitudinal Acceleration ax (m/s2) | Lateral Acceleration ay (m/s2) Acceleration Rate of Change C (m/s3) | Transport Mode | Passenger Posture |
|---|---|---|---|---|
| [29] | ax = +1.34: max acceleration ax = −1.34: max braking | ay = 0.98–1.47: uncomfortable | Light rail | Not specific |
| [30] | ax = +0.58: max acceleration ax = −0.54: max braking | ay = 0.49: uncomfortable | Heavy rail | Not specific |
| [31,32] | ay ≤ +1.8: acceptable, ay = +1.8÷3.6: bearable ay > +5.0: bearing ability | Car | Sitting | |
| [35] | ax = −3.4: comfortable braking | ay = 0.4–1.3: safety within spiral curve C = 0.3÷0.9: comfortable rate of change | Car | Sitting |
| [28] | ay = 1.47: uncomfortable on light rail ay = 0.49: uncomfortable on heavy rail | AV | Sitting | |
| [36] | ay = 0.6–1.0: uncomfortable C = 0.3–0.6: uncomfortable | Guided bus | Not specific | |
| [33] | ax > +1.5: uncomfortable ax < −0.75: uncomfortable | Bus | Sitting | |
| [34] | ax < −1.4, ax > +1.5: level 1 ax < −2.2, ax > +2.5: level 2 | ay < −1.4, ay > +1.6: level 1 ay < −2.0, ay > +2.0: level 2 | Bus | Standing |
| [17] | ay ≤ 1.5: comfortable ay = 1.5÷1.75: uncomfortable ay = 1.75÷2.0: very uncomfortable ay > 2.0: extremely uncomfortable | Bus, AB application | Sitting, leaning standing |
| Traffic Condition | λT | λa | λb | Driving Behavior |
|---|---|---|---|---|
| free traffic | 1 | 1 | 1 | default/comfort |
| upstream front | 1 | 1 | 0.7 | increased safety |
| congested traffic | 1 | 1 | 1 | default/comfort |
| downstream front | 0.5 | 2 | 1 | high dynamic capacity |
| bottleneck | 0.7 | 1.5 | 1 | breakdown prevention |
| Merged Platoon | Number of Modules | Platoon Formation From | Ride Comfort Criteria and Lateral Acceleration Thresholds | Traffic Conditions | |||||
|---|---|---|---|---|---|---|---|---|---|
| HST Comfort | LRT Comfort | Bus Standing | Bus Leaning | Bus Sitting | Dedicated Lane | ||||
| Platoon A | Platoon B | ay = 0.49 m/s2 | ay = 0.98 m/s2 | ay = 1.50 m/s2 | ay = 1.75 m/s2 | ay = 2.0 m/s2 | without Traffic Interference | ||
| Platoon 1 | 5 | 2 | 3 | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ |
| Platoon 2 | 4 | 2 | 2 | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ |
| Platoon 3 | 3 | 2 | 1 | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ |
| Curve Order | Radius (m) | HST Comfort ay = 0.49 m/s2 | LRT Comfort ay = 0.98 m/s2 | Bus Standing ay = 1.50 m/s2 | Bus leaning ay = 1.75 m/s2 | Bus Sitting ay = 2.0 m/s2 |
|---|---|---|---|---|---|---|
| 1 | 235 | 34 | 48 | 59 (49) | 64 (49) | 68 (49) |
| 2 | 250 | 35 | 49 | 61 (49) | 66 (49) | 70 (49) |
| 3 | 60 | 17 | 24 | 30 | 32 | 34 |
| 4 | 50 | 16 | 22 | 27 | 29 | 31 |
| 5 | 130 | 25 | 35 | 44 | 47 | 51(49) |
| 6 | 30 | 12 | 17 | 21 | 23 | 24 |
| Merged Platoon | Start (s) | Arrival (s) | ||||
|---|---|---|---|---|---|---|
| HST Comfort | LRT Comfort | Bus Standing | Bus Leaning | Bus Sitting | ||
| 1 | 180 | 560 | 530 | 520 | 518 | 516 |
| 2 | 480 | 875 | 843 | 832 | 830 | 828 |
| 3 | 780 | 1170 | 1145 | 1130 | 1128 | 1126 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, T.; Xie, M.; Liu, X.; Arunachalam, N.; Rau, A.; Lechner, B.; Busch, F.; Wong, Y.D. Platooning of Autonomous Public Transport Vehicles: The Influence of Ride Comfort on Travel Delay. Sustainability 2019, 11, 5237. https://doi.org/10.3390/su11195237
Nguyen T, Xie M, Liu X, Arunachalam N, Rau A, Lechner B, Busch F, Wong YD. Platooning of Autonomous Public Transport Vehicles: The Influence of Ride Comfort on Travel Delay. Sustainability. 2019; 11(19):5237. https://doi.org/10.3390/su11195237
Chicago/Turabian StyleNguyen, Teron, Meng Xie, Xiaodong Liu, Nimal Arunachalam, Andreas Rau, Bernhard Lechner, Fritz Busch, and Y. D. Wong. 2019. "Platooning of Autonomous Public Transport Vehicles: The Influence of Ride Comfort on Travel Delay" Sustainability 11, no. 19: 5237. https://doi.org/10.3390/su11195237
APA StyleNguyen, T., Xie, M., Liu, X., Arunachalam, N., Rau, A., Lechner, B., Busch, F., & Wong, Y. D. (2019). Platooning of Autonomous Public Transport Vehicles: The Influence of Ride Comfort on Travel Delay. Sustainability, 11(19), 5237. https://doi.org/10.3390/su11195237