A Multi-Objective INLP Model of Sustainable Resource Allocation for Long-Range Maritime Search and Rescue


Abstract
:1. Introduction
2. Related Works
3. Problem Description
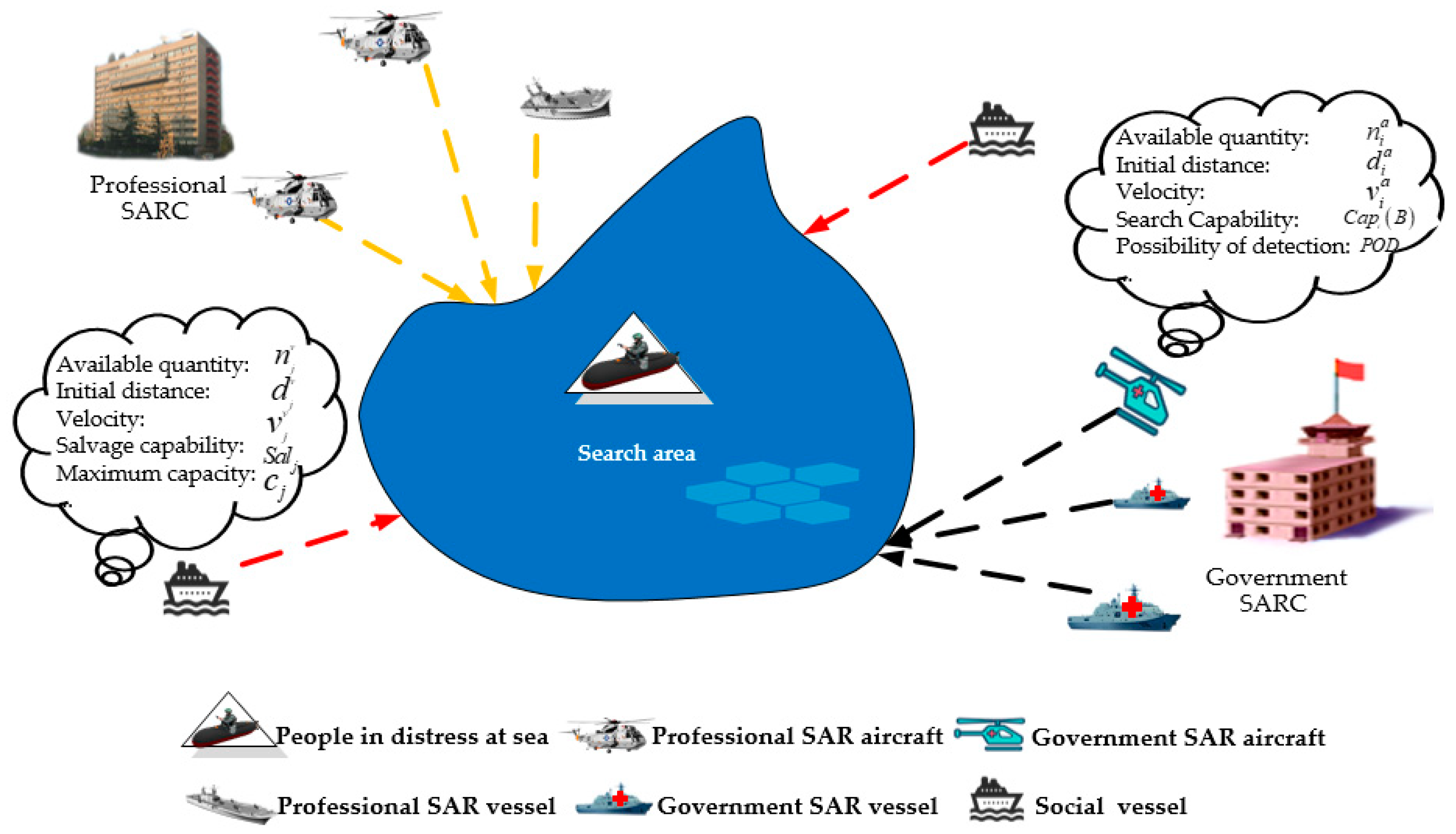
3.1. Elements Involved in Long-Range Maritime SAR
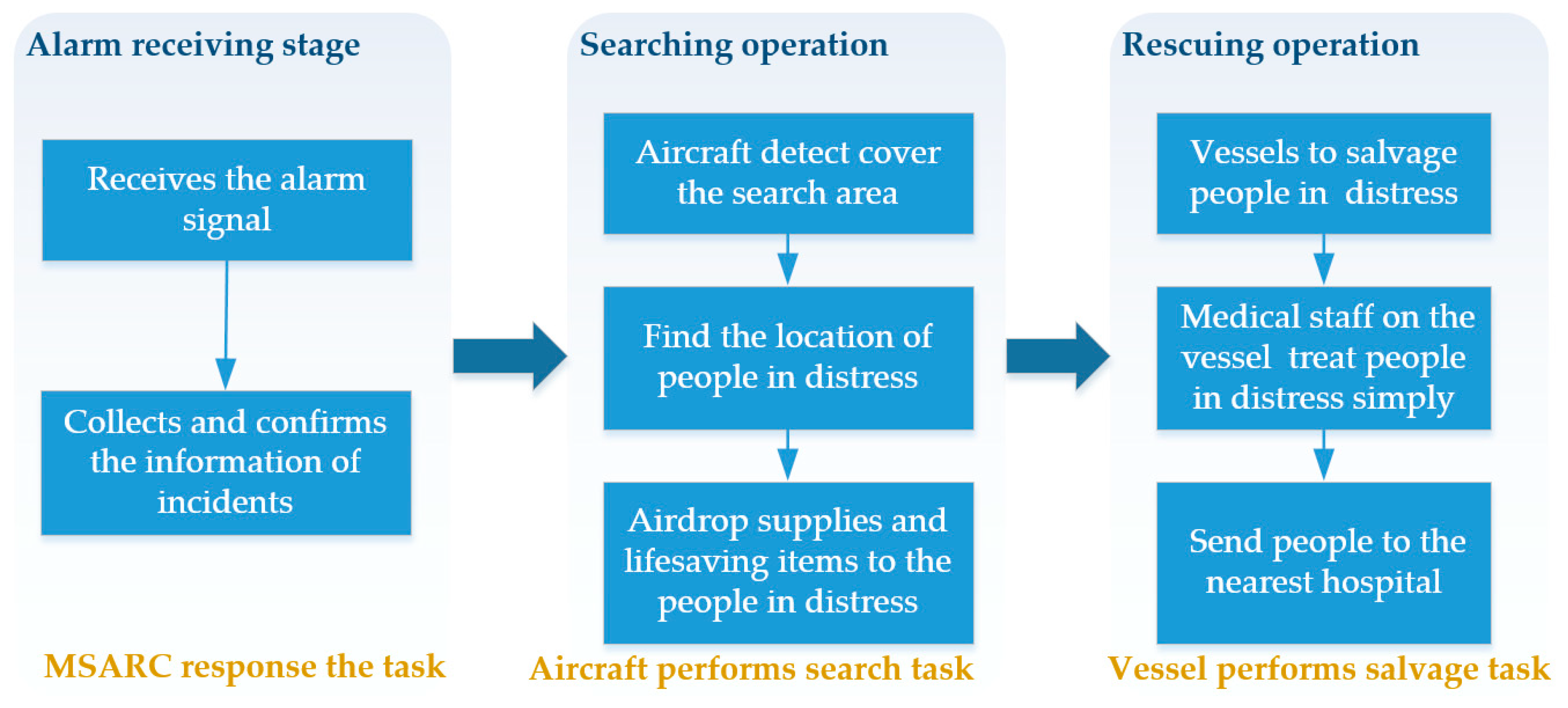
3.2. Long-Range Maritime SAR Operation Process
4. Resource Allocation Considering Cooperation of Aircraft and Vessels for LRMSAR
4.1. Basic Theory of Search Concepts
- (1).
- Probability of Containing (POC). This refers to the probability that the search area contains the people. If the POC is up to 1, it means that the search area contains all people. POC is related to the accuracy of the search area.
- (2).
- Probability of Detection (POD). This refers to the probability that search resources can find the target when the search target is 100% located in a certain sea area. POD is used to evaluate the effectiveness of the search unit in the search area, which is usually expressed as a percentage and can measure the likelihood of success in finding a target. POD can be obtained from experiments and expert experience.
- (3).
- Probability of Search (POS). Professor Koopman put forward the concept of POS in “The Theory of Search” [15], which means the possibility of finding the people eventually. POS is mainly affected by two factors: 1) searchers must detect certain areas that contain targets (POC) and 2) searchers must have the ability to detect and find search targets in the search area (POD). Therefore, the formula of POS is:
- (4).
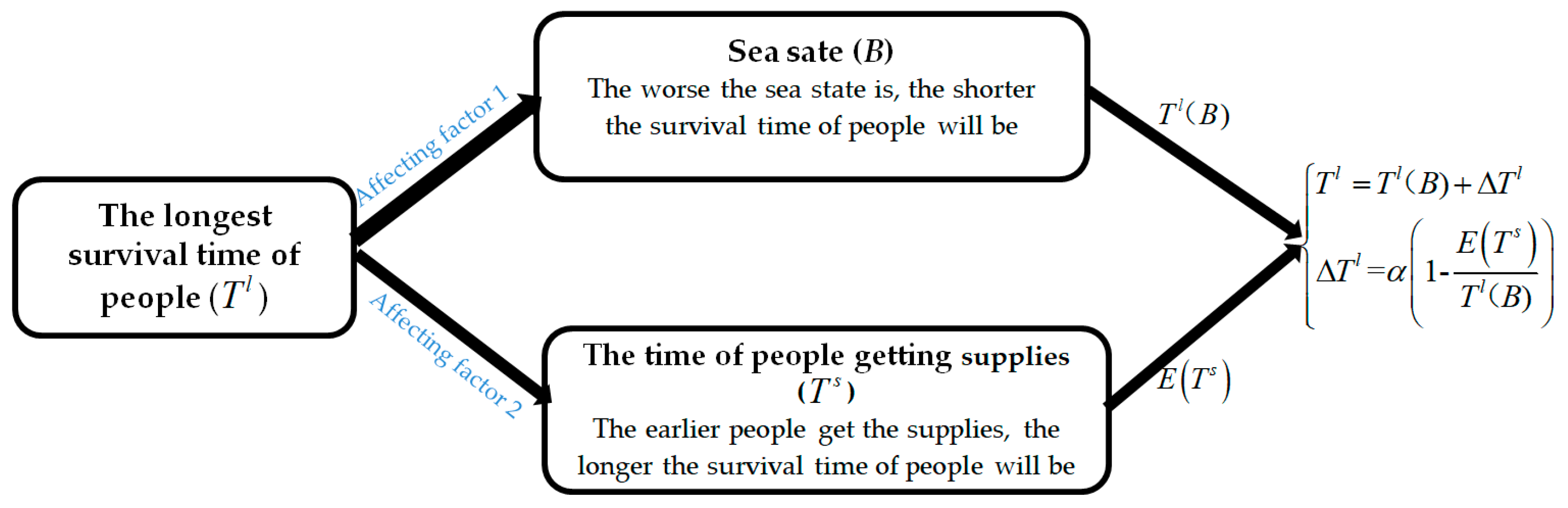
- Survival time. The harsh environment at sea will reduce the survival time of people in distress. The survival time of people refers to the longest time that the body can survive in the seawater under normal conditions. According to previous studies, this mainly depends on the ability of individuals to resist the cold and the surface temperature of seawater, provided that no drowning occurs and no marine animals are injured in the process of drifting. The count shows that the longest survival time of normal human body is 12 min when immersed in seawater at 0 °C, 2 h and 40 min when the water temperature is 10 °C, and 16 h and 20 min when the water temperature is 20 °C [16]. If people are found too late, they will lose their lives, which should be avoided. Thus, LRMSAR requires higher efficiency to maintain people’ vital signs.
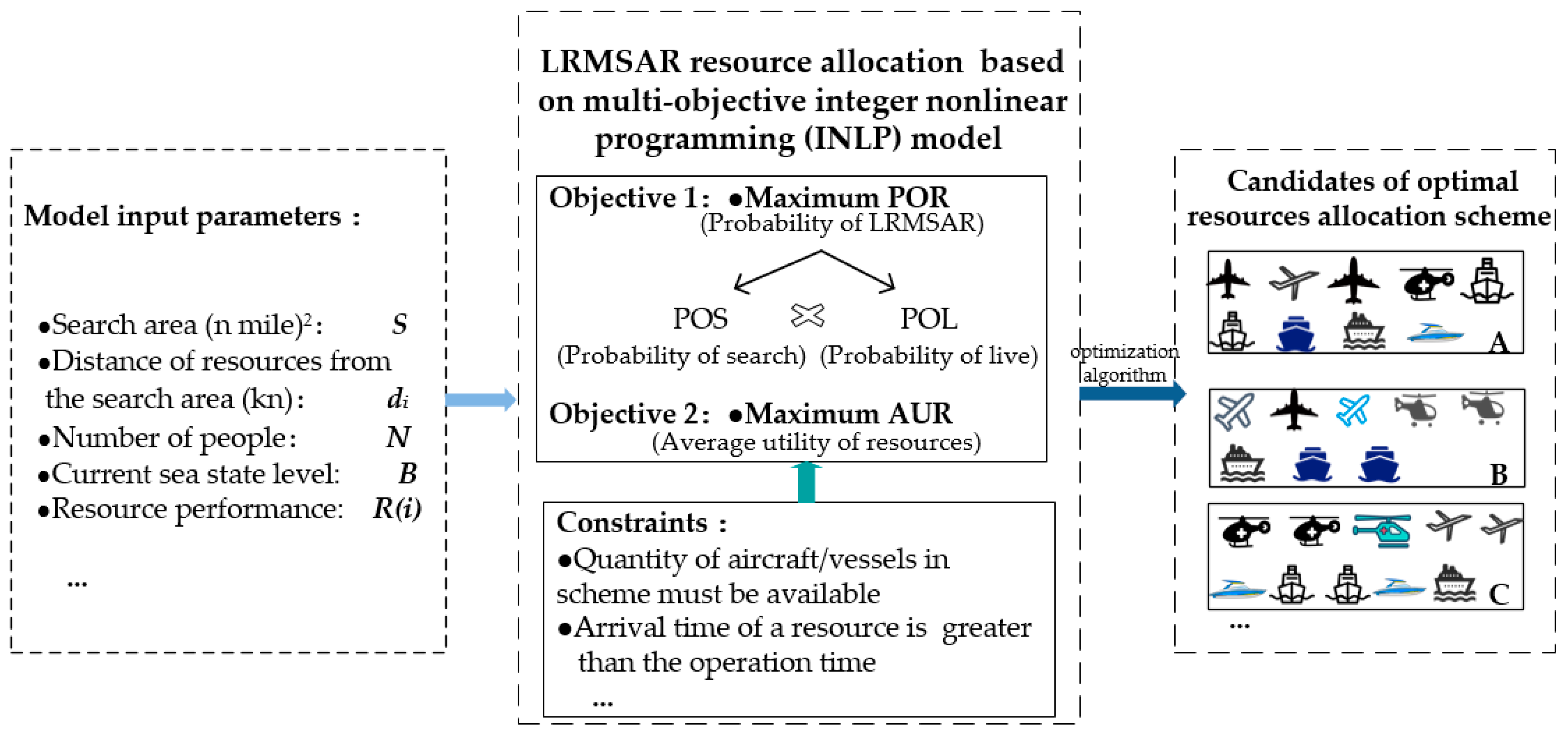
4.2. Multi-Objective INLP Model Construction
4.2.1. Input Parameters
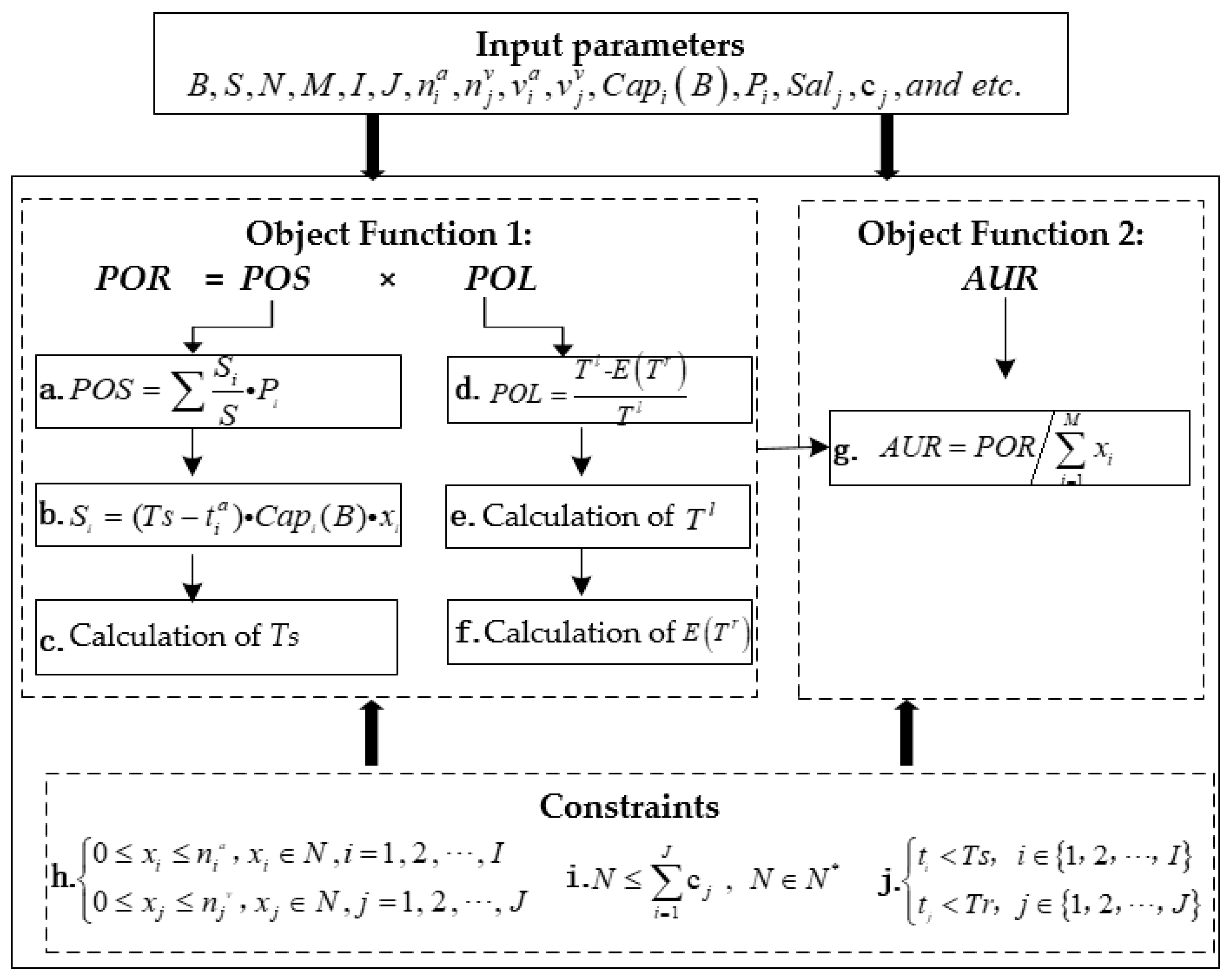
4.2.2. Objective Function
4.2.3. Constraints
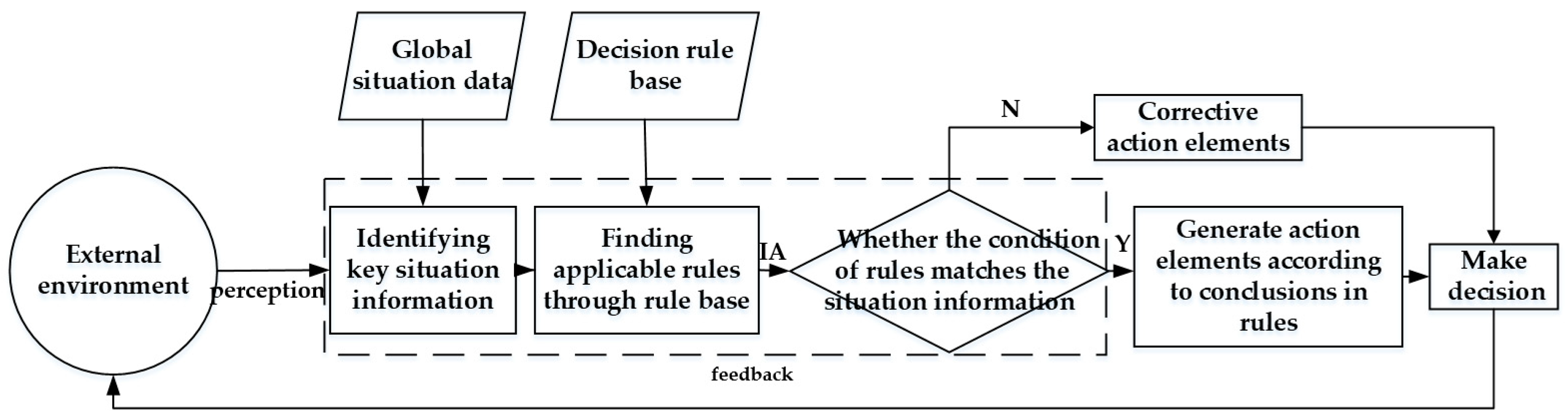
4.3. Rule-Based Multi-Objective Optimization Algorithm
4.3.1. Preliminary Feasible Resource Set Based on the Rule Base
| Algorithm 1. Pseudo-code of rule matching mechanism. |
| Input: Rule base, R; Global situation data, DGS; Equipment Set, SE. Output: Equipment Candidate, CE.
|
4.3.2. NSGA-Ⅱ Optimization Algorithms
| Algorithm 2. Pseudo-code for the proposed algorithm. | |
| Input: Initial population members, P of size N, maximum number of generations, maxGen, crossover probability, pc, mutation probability, pm Output: P, BestF | |
| (1). | BestF |
| (2). | count=0; |
| (3). | InitializeScenario(B,N,S,M, Aircraft,I Ship,J,); |
| (4). | P ← GeneratePopulation(N); |
| (5). | for i ← 1 to maxGen |
| (6). | [I+J] Calculateti(P); |
| (7). | CalcuculateT(P, ); |
| (8). | [N] Calculatesi(P, ); |
| (9). | POS Calculatepos(P, [N]); |
| (10). | PersonDetectedN*POS; |
| (11). | Sort(); |
| (12). | for j 1 to N; |
| (13). | ShipPerformsSalvaging FindMinT(TimeSequenceofShip); |
| (14). | countcount +PersonSalvaged(P, ShipPerformsSalvaging); |
| (15). | UpdateTimeSequence(TimeSequenceofShip); |
| (16). | if count+1>PersonDetected; |
| (17). | Break; |
| (18). | Et1 (, ) |
| (19). | Et2 (N,POS, Salj) |
| (20). | POL Possibilityoflive(, ) |
| (21). | ConstraintsCheck(P); |
| (22). | Obj1 POR(P,POL,POS); |
| (23). | Obj2 CalculateAUR(P,POR) |
| (24). | Non-dominated sorting(P); |
| (25). | Oc Crossover(P,pc); |
| (26). | Om Mutate(P,pm); |
| (27). | end |
| (28). | BestF nondominatedsorting(P); |
5. Case Study
5.1. Preliminary Feasible Resources Based on the Rule Base
5.2. NSGA-Ⅱ Algorithms to Optimize Resource Allocation
5.3. Result Analysis
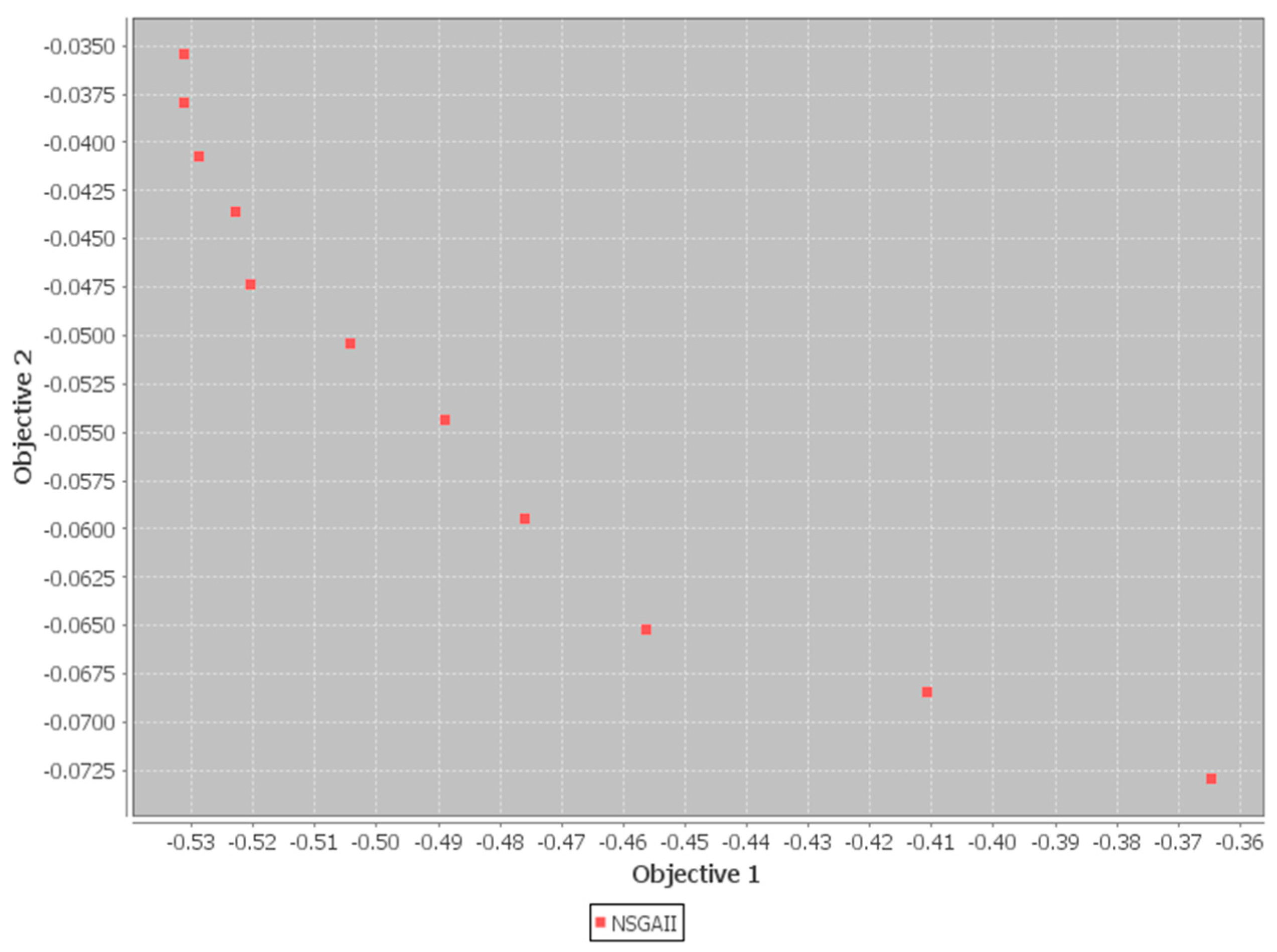
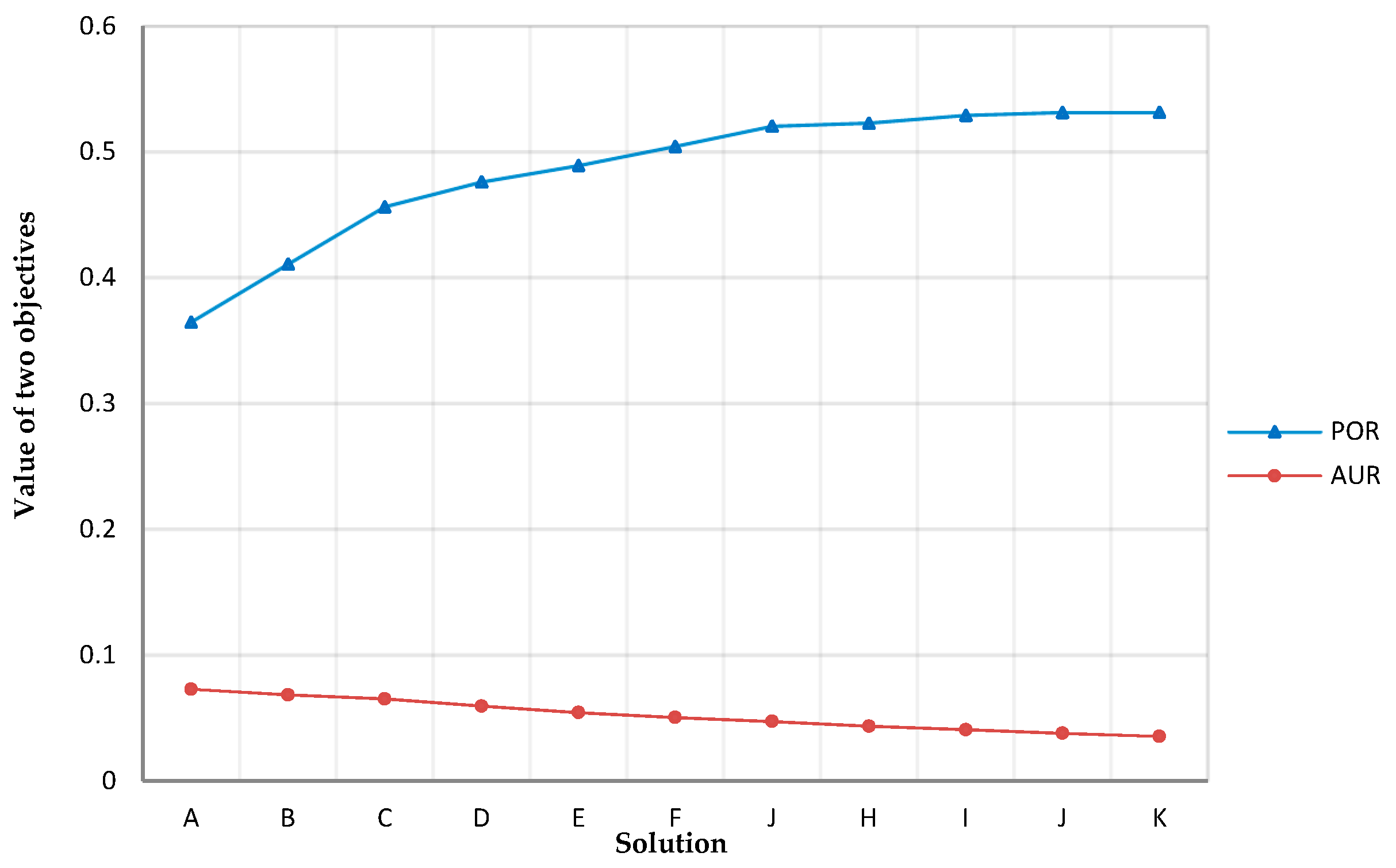
5.3.1. Comparison of the Pareto Set
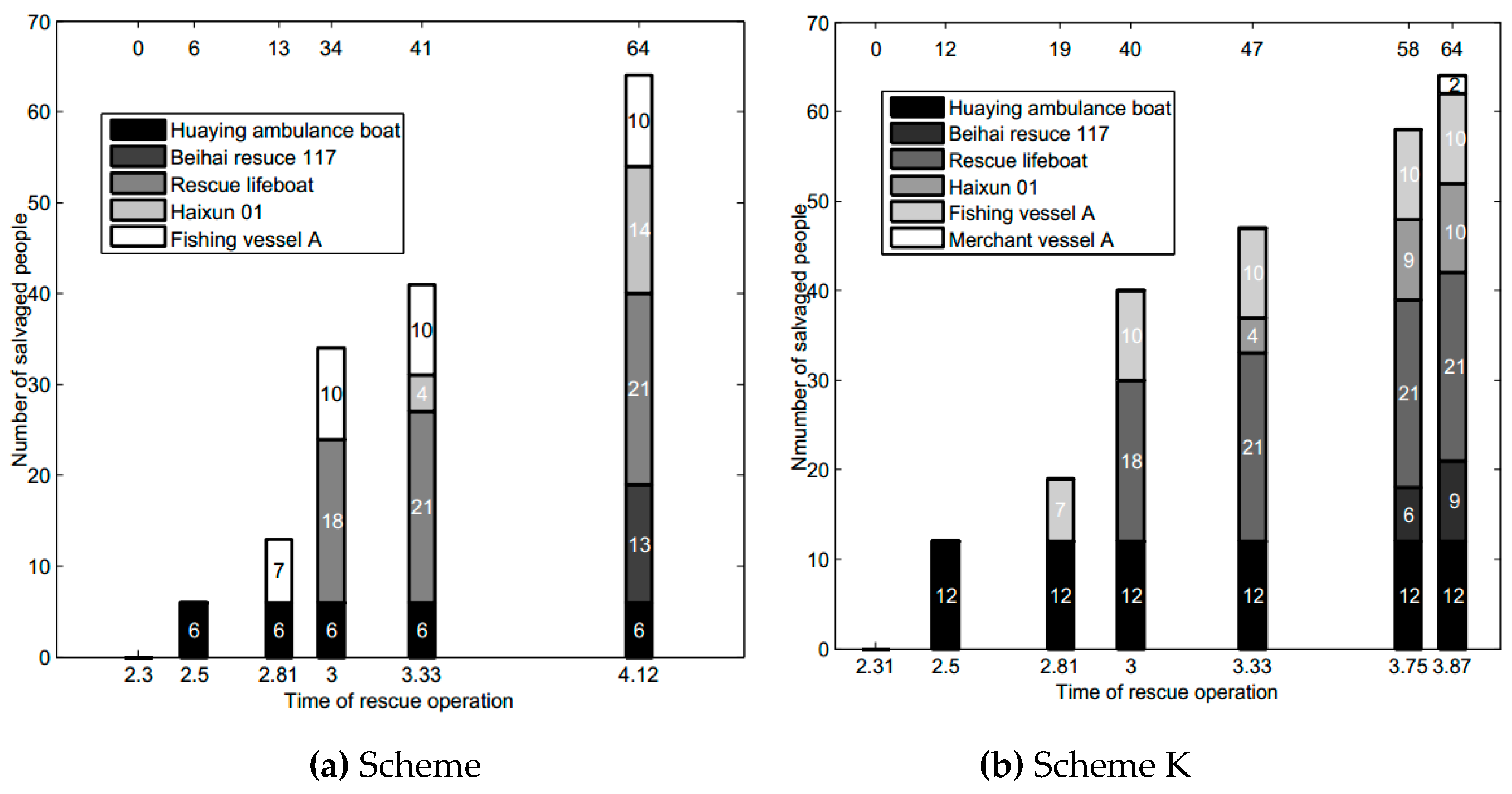
5.3.2. Detailed Procedure Analysis of the Solution
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ashton, C.; Bruce, A.S.; Colledge, G.; Dickinson, M. The search for MH370. J. Navig. 2015, 68, 1–22. [Google Scholar] [CrossRef]
- IMO; IACO. International Aeronautical and Maritime Search and Rescue Manual; Ashford Press: London, UK, 1999. [Google Scholar]
- Chinese State Oceanic Administration [EB/OL]. Available online: http://www.soa.gov.cn/zwgk/ (accessed on 19 December 2018).
- Yan, L.; Jinsong, B.; Xiaofeng, H.; Ye, J. A heuristic project scheduling approach for quick response to maritime disaster rescue. Intern. J. Proj. Manag. 2009, 27, 620–628. [Google Scholar] [CrossRef]
- Degre, T.; Glansdorp, C.; van der Tak, C. The importance of a risk based index for vessels to enhance maritime safety. In Proceedings of the 10th IFAC Symposium on Control in Transportation Systems, Tokyo, Japan, 4–6 August 2003. [Google Scholar]
- Urk, W.V.; Vries, W.A.D. POLSSS: Policy making for sea shipping safety. Saf. Sci. 2000, 35, 139–150. [Google Scholar] [CrossRef]
- Jacobsen, S.R.; Gudmestad, O.T. Long-range rescue capability for operations in the Barents Sea. In Proceedings of the American Society of Mechanical Engineers 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–14 June 2013. [Google Scholar] [CrossRef]
- Brachner, M. A simulation model to evaluate an emergency response system for offshore helicopter ditches. In Proceedings of the 2015 Winter Simulation Conference, Huntington Beach, CA, USA, 6–9 July 2015. [Google Scholar]
- Arbolino, R.; Carlucci, F.; Cirà, A.; De Simone, L.; Ioppolo, G.; Yigitcanlar, T. Factors affecting transport privatization: An empirical analysis of the EU. Transp. Res. Part A Policy Pract. 2018. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhao, D.; Huang, X. Principles and Methods for Selecting Salvage Vessels in Maritime Salvage Work. J. Dalian Marit. Univ. 1999, 25, 48–51. (In Chinese) [Google Scholar] [CrossRef]
- Zhou, J. Study on the Evaluation Method of Optimum Selection and Sequencing on SAR Ships. Navig. Chi. 2005, 62, 68–73. (In Chinese) [Google Scholar] [CrossRef]
- Karatas, M.; Razi, N.; Gunal, M.M. An ILP and simulation model to optimize search and rescue helicopter operation. J. Oper. Res. Soc. 2017, 68, 1–17. [Google Scholar] [CrossRef]
- Lee, S.; Lee, S.H.; Morrison, J. Decision support scheduling for maritime search and rescue planning with a system of UAVs and fuel service stations. In Proceedings of the International Conference on Unmanned Aircraft Systems, Denver, CO, USA, 9–12 June 2015. [Google Scholar] [CrossRef]
- Zhu, Y. Maritime Search and Rescue; Dalian Maritime University Press: Dalian, China, 2017; pp. 56–65. (In Chinese) [Google Scholar]
- Koopman, B.O. The theory of search III: Optimum distribution of searching effort. Oper. Res. 1957, 5, 613–626. [Google Scholar] [CrossRef]
- Huang, M. Research on Golden Rescue Time in Maritime distress. China Marit. Saf. 2014, 37, 33–35. (In Chinese) [Google Scholar] [CrossRef]
- Abi-Zeid, I.; Frost, J.R. SARPlan: A decision support system for Canadian Search and Rescue Operations. Eur. J. Oper. Res. 2005, 162, 630–653. [Google Scholar] [CrossRef]
- Guitouni, A.; Masri, H. An orienteering model for the search and rescue problem. Comput. Manag. Sci. 2014, 11, 459–473. [Google Scholar] [CrossRef]
- Choi, J.; Zeng, D.; Olshan, A.F.; Cai, J. Joint modeling of survival time and longitudinal outcomes with flexible random effects. Lifetime Data Anal. 2018, 24, 126–152. [Google Scholar] [CrossRef] [PubMed]
- China Maritime Rescue and Salvage Center; Tianjin Maritime Bureau; Dalian Maritime University. National Maritime SAR Manual; Dalian Maritime University Press: Dalian, China, 2011. (In Chinese) [Google Scholar]
- Liu, S. Research on the Knowledge Base Construction and Reasoning Mechanism of Salvage Expert System; Dalian Maritime University: Dalian, China, 2011. (In Chinese) [Google Scholar]
- Lin, Y.K.; Yeh, C.T. Multi-objective optimization for stochastic computer networks using NSGA-II and TOPSIS. Eur. J. Oper. Res. 2012, 218, 735–746. [Google Scholar] [CrossRef]
- Wan, C.Q.; Zhang, X.X.; Zhao, Q.S.; Yang, K.W. Operation loop-based optimization model for resource allocation to military countermeasures versus probabilistic threat. Appl. Sci. 2018, 2, 214. [Google Scholar] [CrossRef]
- A “Oriental Star” Sunken Ship Accident. Available online: https://www.bbc.com/zhongwen/simp/china/2015/06/150605_survivor (accessed on 22 December 2018).
- Dubois, D.; Prade, H. Possibility theory. In Computational Complexity; Springer: New York, NY, USA, 2012; pp. 2240–2252. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description |
|---|---|
| Current sea state level () | |
| Number of people | |
| Search area | |
| Number of all resources types | |
| Number of aircraft types | |
| Number of vessels types | |
| Quantity of each aircraft/vessels type () | |
| The initial distance of aircraft/vessel from the operational area () | |
| The velocity of each aircraft/vessels types () | |
| The maximum sea states allowed by the aircraft/vessel to go to sea () | |
| Search ability (the area of an aircraft searching at unit time) of the th aircraft under sea states B () | |
| Probability of detection (POD) of the th aircraft () | |
| The unit time of the th vessel salvage for each people () | |
| The maximum capacity to carry people of the th vessel () | |
| The longest survival time of people under certain sea states level B |
| Resources Name | Anti-Wind Grade | Sea State Level | Application Area | Maximum Capacity (/Person) | Maximum Duration of Flight (/h) |
|---|---|---|---|---|---|
| Coast Guard Boat 051 | 7 | 5 | Coastal Area | 20 | / |
| Coast Guard Boat 052 | 6 | 4 | Coastal Area | 25 | / |
| Coast Guard Boat 053 | 9 | 6 | Coastal Area | 35 | / |
| Coast Guard Boat 0503 | 5 | 4 | Shelter Area | 18 | / |
| A365N | 5 | 4 | / | / | 4 |
| S-76C++ | 6 | 5 | / | / | 3.5 |
| S-76A | 8 | 7 | / | / | 4.5 |
| Resource Type | Affiliated Organization | Resource Performances | |||||||
|---|---|---|---|---|---|---|---|---|---|
| (kn) | (n mile2 h−1) | (h) | |||||||
| Zhi-8A helicopter | P | 90 | 4 | 220 | 100 | 0.95 | 0 | 0 | 2 |
| Zhi-8S helicopter | P | 90 | 3 | 170 | 90 | 0.7 | 0 | 0 | 2 |
| B-27 fixed-wing aircraft | P | 90 | 4 | 300 | 130 | 0.9 | 0 | 0 | 3 |
| Y-12 fixed-wing aircraft | P | 90 | 4 | 620 | 240 | 0.91 | 0 | 0 | 1 |
| Huaying ambulance boat | P | 90 | 4 | 39 | 0 | 0 | 0.02 | 3 | 4 |
| Beihai resuce 117 | P | 90 | 4 | 27 | 0 | 0 | 0.06 | 15 | 2 |
| Rescue Boat | G | 90 | 4 | 32 | 0 | 0 | 0.03 | 7 | 3 |
| Large Marine Rescue Vessel | G | 90 | 5 | 22 | 0 | 0 | 0.08 | 20 | 1 |
| Zhi-8KA helicopter | G | 120 | 5 | 280 | 120 | 0.8 | 0 | 0 | 2 |
| Yun-12 fixed wing aircraft | G | 120 | 4 | 550 | 200 | 0.95 | 0 | 0 | 2 |
| Be-200 fixed wing aircraft | G | 120 | 3 | 700 | 270 | 0.85 | 0 | 0 | 1 |
| Hospital-ship | G | 120 | 5 | 18 | 0 | 0 | 0.12 | 40 | 1 |
| 920rescue boat | G | 120 | 3 | 35 | 0 | 0 | 0.01 | 8 | 3 |
| Haixun 01 | G | 120 | 5 | 40 | 0 | 0 | 0.08 | 20 | 2 |
| Fishing vessel A | S | 30 | 4 | 12 | \ | \ | 0.04 | 12 | 1 |
| Fishing vessel B | S | 40 | 5 | 10 | \ | \ | 0.01 | 10 | 1 |
| Fishing vessel C | S | 80 | 5 | 9 | \ | \ | 0.05 | 9 | 1 |
| Merchant vessel A | S | 120 | 4 | 32 | \ | \ | 0.15 | 32 | 1 |
| Merchant vessel B | S | 150 | 4 | 39 | \ | \ | 0.1 | 39 | 1 |
| Affiliated Organization | Resource Type |
|---|---|
| Professional Search and Rescue Center (SARC) | Huaying ambulance boat |
| Professional SARC | Beihai rescue 117 |
| Government Search and Rescue (SAR) force | Haixun 01 |
| Professional SARC | Rescue lifeboat |
| Social SAR force | Fishing vessel A |
| Social SAR force | Merchant vessel A |
| Social SAR force | Merchant vessel B |
| Professional SARC | Zhi-8A |
| Professional SARC | Zhi-8S |
| Professional SARC | Y-12 |
| Professional SARC | B-27 |
| Government SAR force | Yun-12 |
| Government SAR force | Be-200 |
| Serial Number | Resource Allocation Scheme | Obeject1: POR | Obeject2: AUR |
|---|---|---|---|
| A | [0 1 0 0 0 0 1 1 0 0 1 0 0 0 0 1 0 0 0] | 0.3646 | 0.0729 |
| B | [0 1 1 1 0 0 1 1 0 0 0 0 0 0 0 1 0 0 0] | 0.4107 | 0.0684 |
| C | [0 1 1 1 0 0 1 1 0 0 0 0 0 0 0 1 0 1 0] | 0.4563 | 0.0652 |
| D | [0 1 2 0 0 0 1 1 0 0 1 0 0 0 0 1 0 1 0] | 0.4760 | 0.0595 |
| E | [1 1 2 0 0 0 1 1 0 0 1 0 0 0 0 1 0 1 0] | 0.4890 | 0.0543 |
| F | [2 1 3 0 0 0 1 1 0 0 0 0 0 0 1 1 0 1 0] | 0.5042 | 0.0504 |
| G | [4 1 2 0 0 0 1 1 0 0 0 0 0 0 0 1 0 1 0] | 0.5204 | 0.0473 |
| H | [4 1 3 0 0 0 1 1 0 0 0 0 0 0 0 1 0 1 0] | 0.5228 | 0.0435 |
| I | [4 1 2 0 0 0 1 1 0 0 0 0 1 0 1 1 0 1 0] | 0.5289 | 0.0407 |
| J | [4 1 3 0 0 0 1 1 0 0 0 0 1 0 0 1 0 1 0] | 0.5312 | 0.0379 |
| K | [4 1 3 0 0 0 1 1 0 0 1 0 1 0 0 1 0 1 0] | 0.5313 | 0.0354 |
| (a) Scheme F | |||
| Scheme F | Professional SARC | Government SAR Force | Social SAR Force |
| Aircraft | Y-12 fixed-wing aircraft x1 Zhi-8A helicopter x1 | Yun-12 x1 | |
| Vessel | Huaying ambulance boat x2 Beihai rescue 117 x1 Rescue lifeboat x3 | Haixun 01 x1 | Fishing vessel A x1 |
| POR | 0.5042 | ||
| AUR | 0.0354 | ||
| (b) Scheme K | |||
| Scheme K | Professional SARC | Government SAR Force | Social SAR Force |
| Aircraft | B-27 fixed-wing aircraft x1 Y-12 fixed-wing aircraft x1 | Yun-12 x1 | |
| Vessel | Huaying ambulance boat x4 Beihai rescue 117 x1 Rescue lifeboat x3 | Haixun01 x1 | Fishing vessel A x1 Merchant vessel A x1 |
| POR | 0.5312 | ||
| AUR | 0.0379 | ||
| (a) Scheme F | (b) Scheme K | ||||||
|---|---|---|---|---|---|---|---|
| Scheme F Aircraft | Arrived Time (h) | Search Area (n mile2) | People Detected | Scheme K Aircraft | Arrived Time (h) | Search Area (n mile2) | People Detected |
| Y-12 | 0.145 | 444 | 35 | Y-12 | 0.145 | 308 | 24 |
| Yun-12 | 0.218 | 356 | 29 | Yun-12 | 0.218 | 242 | 20 |
| Zhi-8A | 0.3 | 146 | 11 | B-27 | 0.409 | 102 | 9 |
| 1.996 | 1.43 | ||||||
| POS | 0.91 | POS | 0.925 | ||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Y.; Ye, Y.; Yang, Q.; Yang, K. A Multi-Objective INLP Model of Sustainable Resource Allocation for Long-Range Maritime Search and Rescue. Sustainability 2019, 11, 929. https://doi.org/10.3390/su11030929
Guo Y, Ye Y, Yang Q, Yang K. A Multi-Objective INLP Model of Sustainable Resource Allocation for Long-Range Maritime Search and Rescue. Sustainability. 2019; 11(3):929. https://doi.org/10.3390/su11030929
Chicago/Turabian StyleGuo, Yu, Yanqing Ye, Qingqing Yang, and Kewei Yang. 2019. "A Multi-Objective INLP Model of Sustainable Resource Allocation for Long-Range Maritime Search and Rescue" Sustainability 11, no. 3: 929. https://doi.org/10.3390/su11030929
APA StyleGuo, Y., Ye, Y., Yang, Q., & Yang, K. (2019). A Multi-Objective INLP Model of Sustainable Resource Allocation for Long-Range Maritime Search and Rescue. Sustainability, 11(3), 929. https://doi.org/10.3390/su11030929