A Hybrid GA with Variable Quay Crane Assignment for Solving Berth Allocation Problem and Quay Crane Assignment Problem Simultaneously



Abstract
:1. Introduction
2. Literature Review
2.1. Berth Allocation Problem (BAP)-Only Studies
2.2. Simultaneous BAP and Quay Crane Assignment Problem (QCAP) Studies
3. The Definition and Formulation of the Simultaneous Dynamic and Discrete BAP (DDBAP) and Dynamic QCAP (DQCAP)
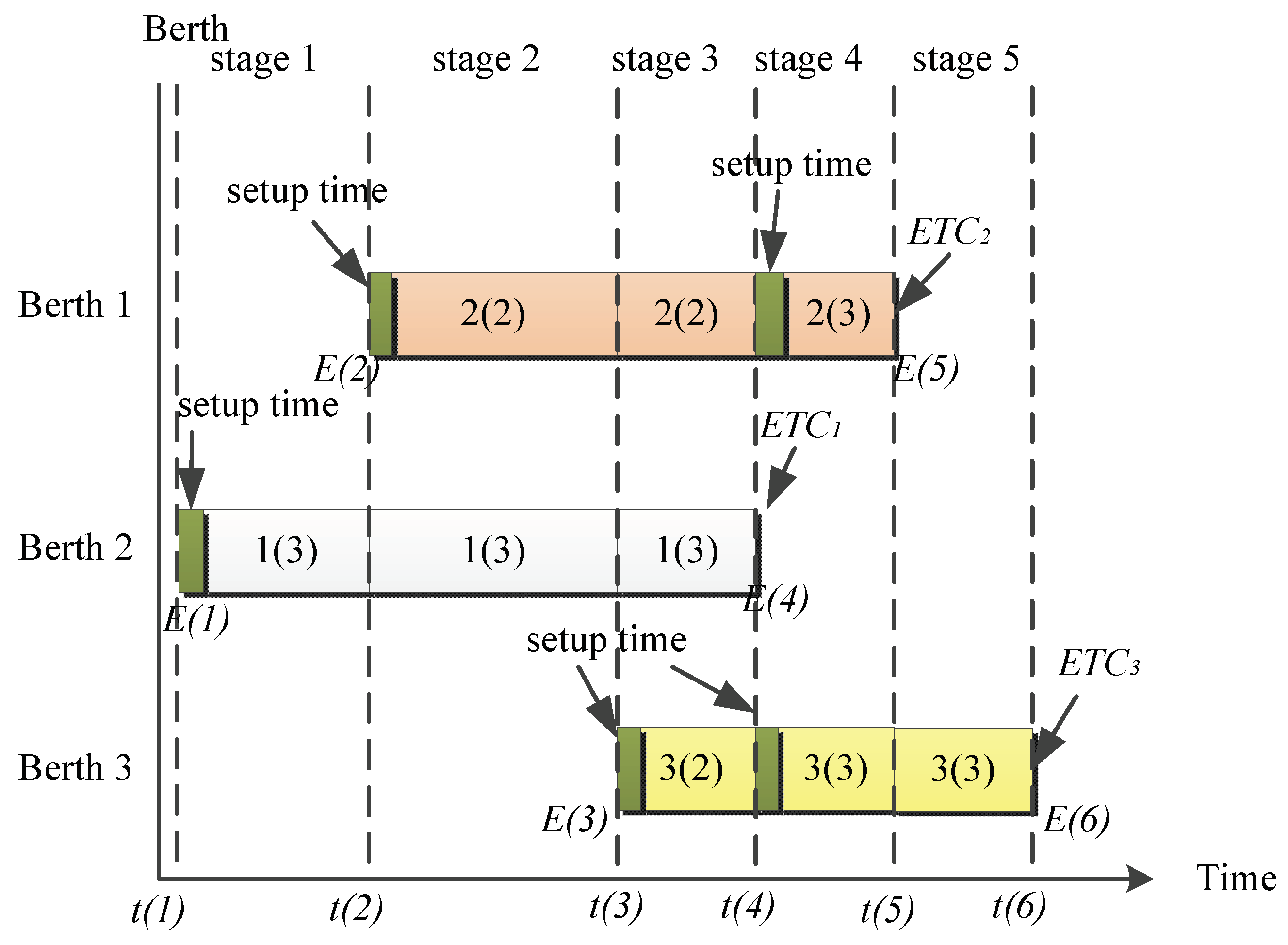
3.1. Berth Plans with Different QC Assignment
3.2. The Cost Factors to be Considered in an Objective Function
3.3. The Estimation of Handling Time for a Ship
- : the interference exponent of QCs. (0
- : the berth deviation factor, which indicates the QC capacity additionally required per one berth deviation. (
- : the demand of crane capacity for ship j in the unit of QC-hours.
- : a location deviation from the desired berth of ship j.
- : the minimum number of QCs assignable to a ship.
- : the maximum number of QCs assignable to a ship.
- : the fixed time requires for setting up a QC.
- : the average time required for moving a QC to the next berth.
- : the total moving distance (in units of berths) for additional QCs assigned to ship j at time period t.
- : the total number of containers to be processed for the ship j at the time period t.
- : QC working rate (containers/hour).
- : the number of QCs assigned to the ship j at the time period t.
- : the number of QCs assigned to the ship j at the time period .
3.4. The Definition of the DDBAP and DQCAP
- J: a set of ships; J = {, …, }; n the total number of ships
- I: a set of berths; I = {1, …, m}; m is the total number of berths
- Q: a set of quay crane; Q = {1, …, TQ}; TQ is the total number of QCs
- T: the planning horizon T = {1, …, H} in unit of hours; H is the total number of time periods within the planning horizon
- i: a berth number (i
- j: a ship number (j
- q: a quay crane number (q
- t: a time interval (t
- : a set of constraints
- : a collection of sets of assignments of ship-to-berth (variable ) and QC-to-ship (variable ) at each time interval t.
- f: an objective function that maps to a time/cost value
3.5. The Mathematical Formulation of the DDBAP and DQCAP
| the estimated time of arrival (ETA) of ship j | |
| . | the actual departure time of ship j |
| the desired berth number for ship j () | |
| the minimum number of QCs assignable to a ship | |
| the maximum number of QCs assignable to a ship | |
| the cost rate of waiting time | |
| the cost rate of delay time | |
| the cost rate of handling time (including times of QC setups and movements) |
4. The Hybrid Genetic Algorithm (HGA) Approach
4.1. The Genetic Algorithm (GA) Model
4.1.1. Chromosome Representation
4.1.2. Population Initialization
4.1.3. Population Reproduction
4.1.4. Crossover Operation
4.1.5. Mutation Operation
- (1)
- (2)
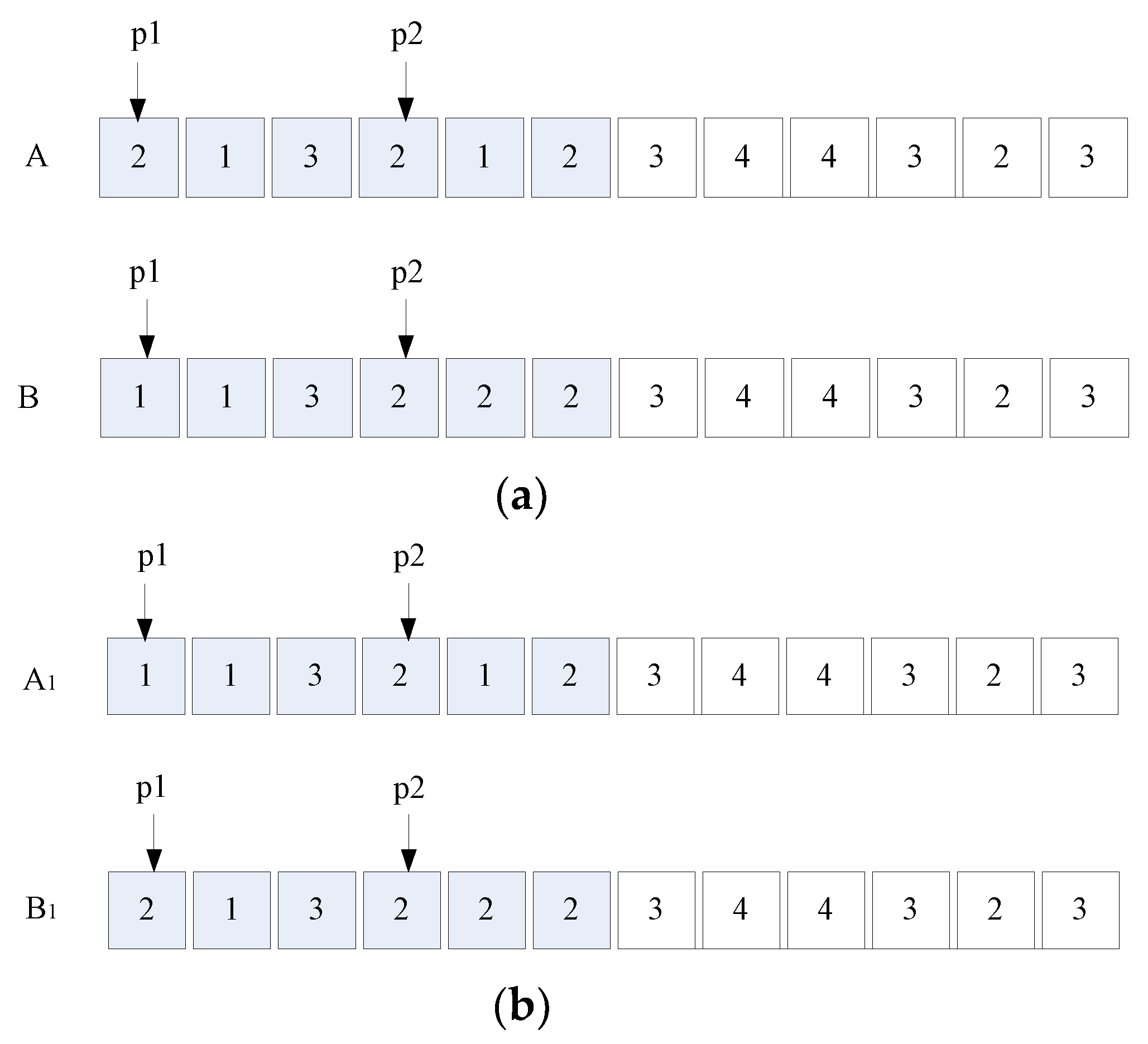
- Thoros mutation: as shown in Figure 6a, three gene positions p1 < p2 < p3 are chosen randomly, which shall take the different positions not necessarily successively. Then, the gene value of position p1 becomes the gene value of position p2, the original gene value of p2 becomes the gene value of p3, and finally the original gene value of p3 becomes the gene value of p1. After mutation, Figure 6a becomes Figure 6b.
- (3)
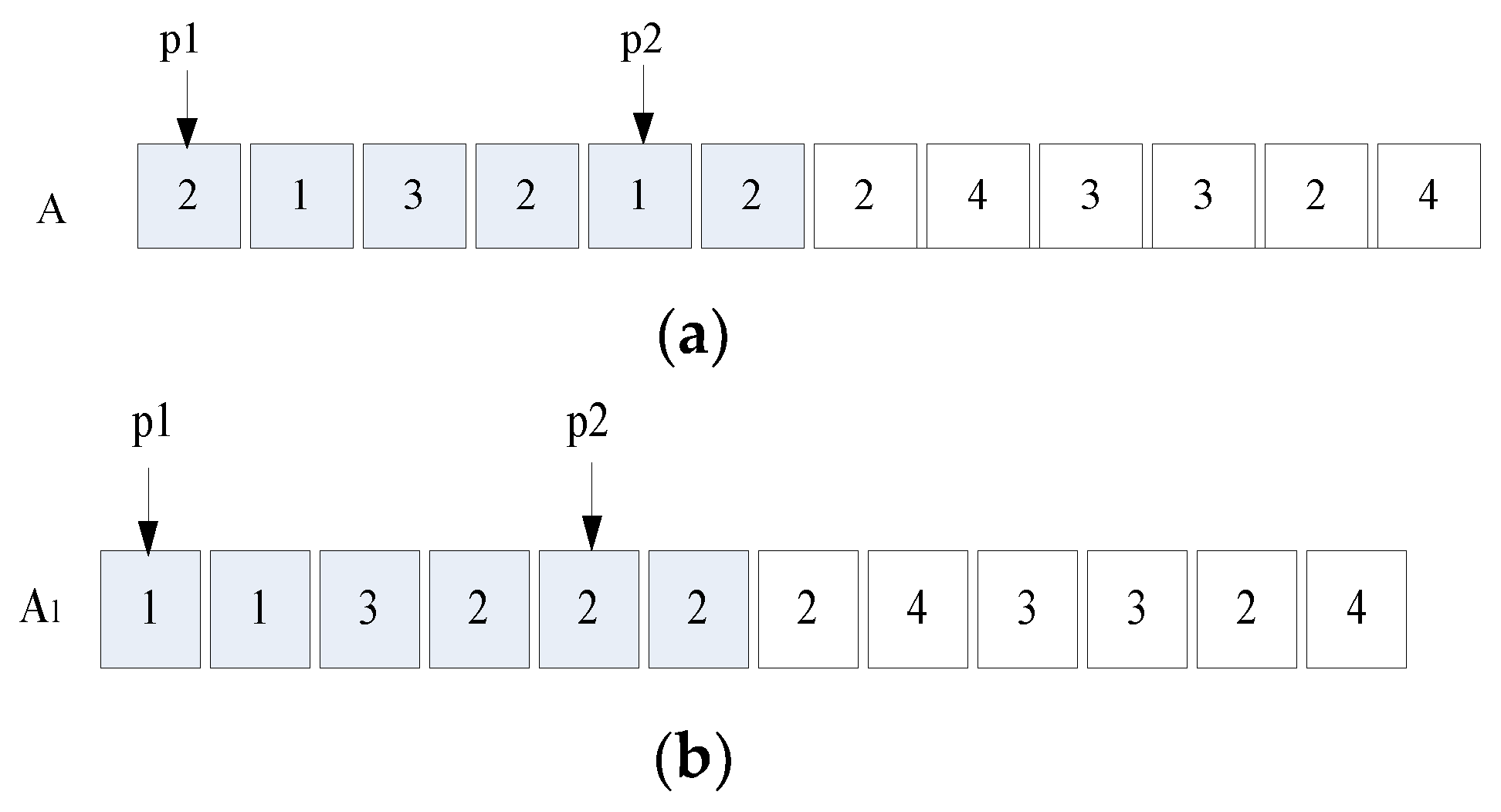
- Thoras mutation: as shown in Figure 7a, the process of Thoras mutation is similar that of Thoros mutation. But the Thoras selects three consecutive genes. After randomly selecting the first gene position (p1), the two other successive genes are then determined. As a result, the last becomes the first of the sequence, the second becomes last and the first becomes the second in the sequence. After mutation, the Figure 7a becomes Figure 7b. Each mutation is subject to constraints, Equations (10) and (11). For an infeasible solution, it is discarded and regenerated.
4.1.6. Termination
4.1.7. Fitness Value Function
4.1.8. The Whole Process Flow of the HGA Approaches
- (1)
- Set the population size (P) crossover rate (Rm), mutation rate (Rc), the maximum number of generation gm, and set the current generation i to 1 (I = 1).
- (2)
- Initiate a population of chromosomes.
- (3)
- Determine the service priority for each ship.
- (4)
- If then go to Step (6); otherwise, go to Step (5).
- (5)
- Population reproduction.
- (6)
- Crossover operation.
- (7)
- Mutation operation using SWM/THOROS/THORAS.
- (8)
- Transform each chromosome in the population into a berth plan.
- (8.1)
- Sort the estimated times of arrival (ETAs) of those ships assigned to a same berth. Break a tie by ship priority.
- (8.2)
- Determine the BTj of each ship.
- (8.3)
- Determine the ECTj of each ship using Equation (5).
- (9)
- Calculate the FV of the current solution and compare it to the best solution; if better then update the best solution.
- (10)
- Check if the termination condition ( gm) is met. If “yes” then output the best solution; otherwise, i = i + 1 and go to step (4).
4.2. A Heuristic-Based Event
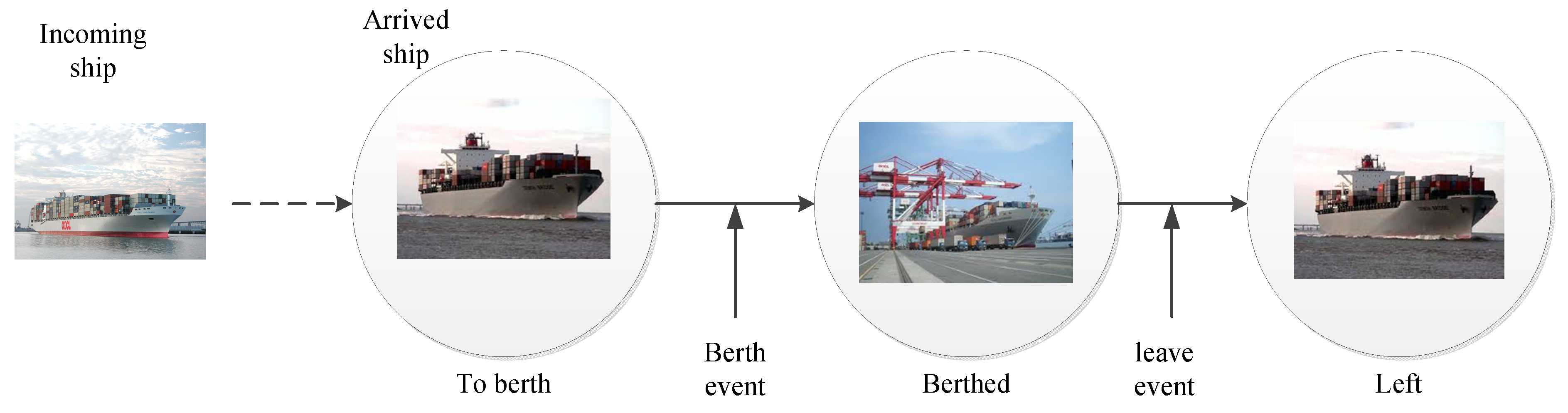
4.2.1. States and Events
4.2.2. Event-Triggered QC Assignment/Reassignment
4.2.3. Finding the Next Event
- : the total number of ships.
- : a set of ships at “to berth” state.
- : a set of ships at “berthed” state.
- : a set of ships at “left” state.
- : the current stage number.
- : the expected completion time (ECT) of ship j () estimated at the previous stage .
- : the ETA of ship j ().
- : the amount of QCs assigned to the ship j at the previous stage
- : the amount of QCs assigned to the ship j at the current stage
4.2.4. The Event-Based Heuristic for Variable QC Assignment
- : is the remaining workload (the total number of containers) of berthed ship j estimated at the stage .
- : is the number of QCs assigned to the berthed ship j.
- : is the number of QCs released by leaving ship .
4.2.5. The Main Process Flow of the Event-Based Heuristic
4.3. The Main Process Flow of HGAs
- (1)
- Set the population size (P) crossover rate (Rm), mutation rate (Rc), the maximum number of generations gm, and set the current generation i to 1 (i = 1).
- (2)
- Initiate a population of chromosomes.
- (3)
- Determine the service priority for each ship.
- (4)
- If then go to Step (6); otherwise, go to Step (5).
- (5)
- Population reproduction.
- (6)
- Crossover operation (TPX).
- (7)
- Mutation operation (Swap/Thoras/Thoros).
- (8)
- Transform each chromosome in the population into a berth plan.
- (9)
- Calculate the FV of the current solution and compare it to the best solution; if better then update the best solution.
- (10)
- Check if the termination condition ( gm) is met. If “yes” then output the best solution; otherwise, i = i + 1 and go to step (4).
5. Numerical Example
5.1. Parameter Setting and Ship Data Generation for the Example
5.2. Comparison of Various GAs and HGAs
5.3. Findings and Discussion
- (1)
- Our experimental results showed that the three HGAs can generate variable QC assignments and the derived results are better than those obtained from a GA with time-invariant QC assignment.
- (2)
- Figure 12 shows the average advantages percentage obtained from the three HGAs compared with GAs under different problem sizes. Generally speaking, the larger the problem size, the greater the advantage. Compared with GA3, HGA3 has the best advantage (123.3%) at the problem size 100 × 3.
- (3)
- Different mutation operations employed by a GA or HGA can lead to different planning results. In terms of average FV, our experiments showed that the GA3 with Thoros mutation had the best performance; the GA2 with Thoras is the second best; the GA1 with Swap mutation is the worst. Compared with the two-point mutation operation Swap, the three-point mutation operations including Thoras and Thoros appear to be more capable of exploring a solution space.
- (4)
- The variable QC assignment can lead to advantages for these HGAs. This kind of QC assignment can reassign released QCs immediately to other ships, which can reduce the handling time for ships due to increased QC capability. Furthermore, the reduced handling times of ships can lead to an earlier release of berth and thus waiting times and then delay times of ships. This initiates a positive chain effect.
- (5)
- In this research the gain from the variable QC assignment has been justified against the cost of more QC setups and movements.
- (6)
- Among the three proposed HGAs, our experiments showed that the HGA3 had the best performance in terms of average FV.
- (7)
- The average computational times required for HGAs to complete experimental runs at different problem sizes n × 3 (with n = 20, 40, 60, 80 to 100) are acceptable. For example, at the problem size 100 × 3 an average of 469.5 + 90.9 s (or about 9 min) are required for HGA3 to complete one experiment when setting n = 100 and iteration runs = 500.
6. Conclusions
- (1)
- Three novel HGAs have been proposed to cope with the DDBAP and DQCAP simultaneously. Each of the three HGAs combines a GA with an event-based heuristic. The dynamic framework embedded in these HGAs enables variable QC assignment that can better utilize available QCs.
- (2)
- Our experiment results showed that the HGAs with variable QC assignments can outperform those GAs with time-invariant QC assignment. Also, it is found that the HGA3 had the best performance among the three HGAs.
- (3)
- In this research we have proposed Equation (1) to estimate the handling time for ships, with the handling time also include required times for QC setup and movements. In addition, in the objective function the costs of QC setup and movement have been included, which helps to justify the gains from the flexibility of QC reassignments.
- (4)
- The HGAs appear to be applicable for berth allocation and QC assignment for calling ships due to acceptable computational time.
- (5)
- The research compares time-invariant QC assignment with variable QC assignment. These kinds of studies have been rarely undertaken in the past.
Author Contributions
Funding
Conflicts of Interest
References
- Hsu, H.P.; Wang, C.N.; Chou, C.C.; Lee, Y.; Wen, Y.F. Modeling and Solving the Three Seaside Operational Problems Using an Object-Oriented and Timed Predicate/Transition Net. Appl. Sci. 2017, 7, 218. [Google Scholar] [CrossRef]
- Vis, I.F.A.; de Koster, R. Transshipment of container at a container terminal: An overview. Eur. J. Oper. Res. 2003, 147, S0377–S2217. [Google Scholar] [CrossRef]
- Salido, M.A.; Mario, R.M.; Barber, F. A decision support system for managing combinatorial problems in a container terminal. Knowl. Based Syst. 2012, 29, 63–74. [Google Scholar] [CrossRef]
- Bierwirth, C.; Meisel, F. A follow-up survey of berth allocation and quay crane scheduling problems in container terminal. Eur. J. Oper. Res. 2015, 244, 675–689. [Google Scholar] [CrossRef]
- Liang, C.J.; Huang, Y.F.; Yang, Y. A quay crane dynamic scheduling problem by hybrid evolutionary algorithm for berth allocation planning. Comput. Ind. Eng. 2009, 56, 1021–1028. [Google Scholar] [CrossRef]
- Raa, B.; Dullaert, W.; Schaeren, R.V. An enriched model for the integrated berth allocation and quay crane assignment problem. Expert Syst. Appl. 2011, 38, 4136–4147. [Google Scholar] [CrossRef]
- Zhang, C.R.; Zheng, L.; Zhang, Z.H.; Shi, L.Y.; Armstrong, A.J. The allocation of berths and quay cranes by using a sub-gradient optimization technique. Comput. Ind. Eng. 2010, 58, 40–50. [Google Scholar] [CrossRef]
- Bierwirth, C.; Meisel, F. A survey of berth allocation and quay crane scheduling problems in container terminals. Eur. J. Oper. Res. 2010, 202, 615–627. [Google Scholar] [CrossRef]
- Imai, A.; Chen, H.C.; Nishimura, E.; Papadimitriou, S. The simultaneous berth and quay crane allocation problem. Transp. Res. Part E Logist. Transp. Rev. 2008, 5, 900–920. [Google Scholar] [CrossRef]
- Zhou, P.F.; Kang, H.G. Study on berth and quay-crane allocation under stochastic environments in container terminal. Syst. Eng. Theory Pract. 2008, 28, 161–169. [Google Scholar] [CrossRef]
- Chang, D.F.; Jiang, Z.H.; Yan, W.; He, J.L. Integrating berth allocation and quay crane assignments. Transp. Res. Part E Logist. Transp. Rev. 2010, 46, 975–990. [Google Scholar] [CrossRef]
- Han, X.L.; Lu, Z.Q.; Xi, L.F. A proactive approach for simultaneous berth and quay crane scheduling problem with stochastic arrival and handling time. Eur. J. Oper. Res. 2010, 207, 1327–1340. [Google Scholar] [CrossRef]
- Liang, C.J.; Guo, J.Q.; Yang, Y. Multi-objective hybrid genetic algorithm for quay crane dynamic assignment in birth allocation planning. J. Intell. Manuf. 2011, 22, 471–479. [Google Scholar] [CrossRef]
- Brown, G.G.; Lawphongpanich, S.; Thurman, K.P. Optimizing ship berthing. Nav. Res. Logist. 1994, 41. [Google Scholar] [CrossRef]
- Imai, A.; Nagaiwa, K.I.; Tat, C.W. Efficient planning of berth allocation for container terminals in Asia. J. Adv. Transp. 1997, 31, 75–94. [Google Scholar] [CrossRef]
- Imai, A.; Nishimura, E.; Papadimitrious, S. The dynamic berth allocation problem for a container port. Transp. Res. Part B Methodol. 2001, 35, 401–417. [Google Scholar] [CrossRef] [Green Version]
- Imai, A.; Nishimura, E.; Papadimitrious, S. Berth allocation with service priority. Transp. Res. Part B Methodol. 2003, 37, 437–457. [Google Scholar] [CrossRef] [Green Version]
- Hansen, P.; Oǧuz, C.; Mladenović, N. Variable neighborhood search for minimum cost berth allocation. Eur. J. Oper. Res. 2008, 191, 636–649. [Google Scholar] [CrossRef]
- Golias, M.M.; Boile, M.; Theofanis, S. Service Time Based Customer Differentiation Berth scheduling. Transp. Res. Part E Logist. Transp. Rev. 2009, 45, 878–892. [Google Scholar] [CrossRef]
- Saharidis, G.K.D.; Golias, M.M.; Boile, M.; Theofanis, S.; Ierapetritou, M.G. The berth scheduling problem with customer differentiation: A new methodological approach based on hierarchical optimization. Int. J. Adv. Manuf. Technol. 2010, 46, 377–393. [Google Scholar] [CrossRef]
- Xu, D.S.; Li, C.L.; Leung, J.Y.T. Berth allocation with time-dependent physical limitations on vessels. Eur. J. Oper. Res. 2012, 216, 47–56. [Google Scholar] [CrossRef]
- Lalla-Ruiz, E.; Expósito-Izquierdo, C.; Melián-Batista, B.; Moreno-Vega, J.M. A set-partitioning-based model for the berth allocation problem under time-dependent limitations. Eur. J. Oper. Res. 2016, 250, 1001–1012. [Google Scholar] [CrossRef]
- Ursavas, E.; Zhu, S.X. Optimal policies for the berth allocation problem under stochastic nature. Eur. J. Oper. Res. 2016, 255, 380–387. [Google Scholar] [CrossRef]
- Dulebenets, M.A. A novel Memetic Algorithm with a deterministic parameter control for efficient berth scheduling at marine container terminals. Marit. Bus. Rev. 2017, 2, 302–330. [Google Scholar] [CrossRef]
- Umang, N.; Bierlaire, M.; Erera, A.L. Real-time management of berth allocation with stochastic arrival and handling times. J. Sched. 2017, 20, 67–83. [Google Scholar] [CrossRef]
- Zhen, L.; Liang, Z.; Zhuge, D.; Lee, L.H.; Chew, E.P. Daily berth planning in a tidal port with channel flow control. Transp. Res. Part B Methodol. 2017, 106, 193–217. [Google Scholar] [CrossRef]
- Dulebenets, M.A. Application of Evolutionary Computation for berth scheduling at marine container terminals: Parameter tuning versus parameter control. IEEE Trans. Intell. Transp. Syst. 2018, 19, 25–37. [Google Scholar] [CrossRef]
- Dulebenets, M.A.; Kavoosi, M.; Abioye, O.; Pasha, J. A Self-Adaptive Evolutionary Algorithm for the Berth Scheduling Problem: Towards Efficient Parameter Control. Algorithms 2018, 11, 100. [Google Scholar] [CrossRef]
- Giallombardo, G.; Moccia, L.; Salani, M.; Vacca, I. Modeling and solving the tactical berth allocation problem. Transp. Res. Part B Methodol. 2010, 44, 232–245. [Google Scholar] [CrossRef]
- Li, M.W.; Hong, W.C.; Geng, J.; Wang, J. Berth and quay crane coordinated scheduling using multi-objective chaos cloud particle swarm optimization algorithm. Neural Comput. Appl. 2017, 28, 3163–3182. [Google Scholar] [CrossRef]
- Xiang, X.; Liu, C.; Miao, L. Reactive strategy for discrete berth allocation and quay crane assignment problems under uncertainty. Comput. Ind. Eng. 2018, 126, 196–216. [Google Scholar] [CrossRef]
- Meisel, F.; Bierwirth, C. Heuristic for the integration of crane productivity in the berth allocation problem. Transp. Res. Part E Logist. Transp. Rev. 2009, 45, 196–209. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | Set = 1, B = , F = , A = |
| 2 | While (F ) then |
| 3 | do{ |
| 4 | determine the next event time t() using Equation (16) and identify the owner (ship j) of the next event |
| 5 | |
| 6 | if then |
| 7 | trigger the “berth” event |
| 8 | move the ship j from set A to set |
| 9 | assign the number of QCs to the ship j () according to the jth gene value (derived from GA1) in the right segment of the chromosome. |
| 10 | |
| 11 | else if then |
| 12 | trigger the “leave” event |
| 13 | move the ship j from set B to set F |
| 14 | reassign released QCs from ship j to remaining berthed ships () using Equation (19) |
| 15 | |
| 16 | update for berthed ships ( using Equation (18) |
| 17 | End if |
| 18 | = + 1 |
| 19 | } |
| (1) GA1 FV | (2) GA1 Time | (3) HGA1 FV | (4) HGA1 Time | (5) GA2 FV | (6) GA2 Time | (7) HGA2 FV | (8) HGA2 Time | (9) GA3 FV | (10) GA3 Time | (11) HGA3 FV | (12) HGA3 Time | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 20 × 3 | 1.939 | 120.0 | 2.341 | 8.4 | 2.057 | 111.0 | 2.257 | 8.4 | 1.954 | 108.0 | 2.195 | 9.0 |
| 1.789 | 111.0 | 2.187 | 8.1 | 2.261 | 108.0 | 2.553 | 9.0 | 1.987 | 108.0 | 2.255 | 8.1 | |
| 1.729 | 111.0 | 2.044 | 8.4 | 2.257 | 111.0 | 2.461 | 8.1 | 2.048 | 111.0 | 2.321 | 8.4 | |
| 2.473 | 120.0 | 2.503 | 8.4 | 2.152 | 111.0 | 2.525 | 8.1 | 2.314 | 111.0 | 2.809 | 9.0 | |
| 2.134 | 111.0 | 2.457 | 8.7 | 2.112 | 108.0 | 2.623 | 8.4 | 1.815 | 111.0 | 2.618 | 8.4 | |
| 1.656 | 111.0 | 2.035 | 8.1 | 2.098 | 111.0 | 2.294 | 8.4 | 1.702 | 120.0 | 2.317 | 9.6 | |
| 1.964 | 111.0 | 2.461 | 8.1 | 1.902 | 111.0 | 2.407 | 8.4 | 2.512 | 108.0 | 2.602 | 8.4 | |
| 2.126 | 108.0 | 2.390 | 8.1 | 1.974 | 111.0 | 2.458 | 8.4 | 1.901 | 111.0 | 2.092 | 8.4 | |
| 2.572 | 111.0 | 2.781 | 8.4 | 1.917 | 111.0 | 2.379 | 8.3 | 2.361 | 108.0 | 2.607 | 8.4 | |
| 1.541 | 111.0 | 2.136 | 8.4 | 1.912 | 111.0 | 2.483 | 8.1 | 2.253 | 111.0 | 2.484 | 8.4 | |
| Average | 1.992 | 112.5 | 2.334 | 8.3 | 2.064 | 110.4 | 2.444 | 8.4 | 2.085 | 110.7 | 2.430 | 8.6 |
| 40 × 3 | 0.950 | 210.0 | 1.394 | 22.5 | 0.946 | 231.0 | 1.127 | 22.8 | 0.759 | 217.5 | 1.169 | 21.0 |
| 0.703 | 216.0 | 1.024 | 21.0 | 0.455 | 216.0 | 0.877 | 21.9 | 0.861 | 216.6 | 1.283 | 21.0 | |
| 0.484 | 216.0 | 0.747 | 21.9 | 0.750 | 201.9 | 1.134 | 21.6 | 0.819 | 216.9 | 1.316 | 21.0 | |
| 0.675 | 222.0 | 1.135 | 21.6 | 0.584 | 216.9 | 1.231 | 21.6 | 0.814 | 219.6 | 2.227 | 21.0 | |
| 0.751 | 216.0 | 1.212 | 21.6 | 0.691 | 215.4 | 1.095 | 20.7 | 0.790 | 216.0 | 1.069 | 21.0 | |
| 0.775 | 216.0 | 1.335 | 21.3 | 0.602 | 219.3 | 0.907 | 22.2 | 0.751 | 216.9 | 0.933 | 21.0 | |
| 0.395 | 219.0 | 0.779 | 22.2 | 0.657 | 222.3 | 0.862 | 21.9 | 0.716 | 218.1 | 1.112 | 24.0 | |
| 0.807 | 216.0 | 1.327 | 21.0 | 0.722 | 219.0 | 1.027 | 22.8 | 0.605 | 219.0 | 1.091 | 21.0 | |
| 0.763 | 225.0 | 1.006 | 21.9 | 1.075 | 228.0 | 1.506 | 24.0 | 0.550 | 225.0 | 0.770 | 24.0 | |
| 0.691 | 222.0 | 1.308 | 23.4 | 0.685 | 231.0 | 1.708 | 21.0 | 0.677 | 222.0 | 1.381 | 24.0 | |
| Average | 0.699 | 217.8 | 1.127 | 21.8 | 0.717 | 220.1 | 1.147 | 22.1 | 0.734 | 218.8 | 1.235 | 21.9 |
| 60 × 3 | 0.124 | 315.0 | 0.253 | 39.0 | 0.137 | 303.0 | 0.322 | 126.0 | 0.143 | 303.0 | 0.390 | 39.0 |
| 0.136 | 306.0 | 0.418 | 42.0 | 0.156 | 306.0 | 0.340 | 42.0 | 0.209 | 501.0 | 0.399 | 42.0 | |
| 0.164 | 339.0 | 0.316 | 39.0 | 0.227 | 318.0 | 0.482 | 45.0 | 0.217 | 381.0 | 0.523 | 42.0 | |
| 0.125 | 348.0 | 0.242 | 42.0 | 0.298 | 321.0 | 0.545 | 39.0 | 0.382 | 315.0 | 0.662 | 36.0 | |
| 0.135 | 315.0 | 0.267 | 51.0 | 0.222 | 303.0 | 0.424 | 39.0 | 0.222 | 303.0 | 0.374 | 39.0 | |
| 0.201 | 300.0 | 0.475 | 39.0 | 0.217 | 300.0 | 0.444 | 39.0 | 0.156 | 303.0 | 0.449 | 39.0 | |
| 0.201 | 300.0 | 0.259 | 39.0 | 0.138 | 300.0 | 0.277 | 39.0 | 0.202 | 303.0 | 0.457 | 42.0 | |
| 0.182 | 333.0 | 0.397 | 39.0 | 0.141 | 303.0 | 0.317 | 39.0 | 0.197 | 282.0 | 0.399 | 42.0 | |
| 0.109 | 303.0 | 0.275 | 45.0 | 0.158 | 303.0 | 0.402 | 39.0 | 0.183 | 303.0 | 0.461 | 42.0 | |
| 0.133 | 354.0 | 0.365 | 48.0 | 0.178 | 306.0 | 0.400 | 39.0 | 0.169 | 288.0 | 0.523 | 51.0 | |
| Average | 0.151 | 321.3 | 0.327 | 42.3 | 0.187 | 306.3 | 0.395 | 48.6 | 0.208 | 328.2 | 0.464 | 41.4 |
| 80 × 3 | 0.101 | 417.0 | 0.247 | 66.0 | 0.071 | 411.0 | 0.213 | 66.0 | 0.071 | 417.0 | 0.166 | 66.0 |
| 0.069 | 414.0 | 0.136 | 66.0 | 0.084 | 405.0 | 0.166 | 66.0 | 0.069 | 420.0 | 0.137 | 66.0 | |
| 0.062 | 417.0 | 0.115 | 66.0 | 0.078 | 414.0 | 0.198 | 66.0 | 0.065 | 384.0 | 0.118 | 66.0 | |
| 0.090 | 390.0 | 0.222 | 66.0 | 0.079 | 420.0 | 0.168 | 66.0 | 0.083 | 414.0 | 0.170 | 66.0 | |
| 0.069 | 411.0 | 0.121 | 66.0 | 0.082 | 414.0 | 0.169 | 66.0 | 0.088 | 390.0 | 0.145 | 66.0 | |
| 0.082 | 414.0 | 0.122 | 66.0 | 0.076 | 402.0 | 0.161 | 66.0 | 0.085 | 402.0 | 0.250 | 66.0 | |
| 0.054 | 417.0 | 0.158 | 66.0 | 0.064 | 417.0 | 0.151 | 66.0 | 0.073 | 414.0 | 0.169 | 66.0 | |
| 0.078 | 408.0 | 0.137 | 66.0 | 0.073 | 414.0 | 0.177 | 66.0 | 0.077 | 423.0 | 0.182 | 66.0 | |
| 0.080 | 411.0 | 0.156 | 69.0 | 0.057 | 414.0 | 0.119 | 66.0 | 0.064 | 411.0 | 0.146 | 69.0 | |
| 0.086 | 414.0 | 0.137 | 69.0 | 0.079 | 366.0 | 0.110 | 57.0 | 0.077 | 555.0 | 0.192 | 63.0 | |
| Average | 0.077 | 411.3 | 0.155 | 66.6 | 0.074 | 407.7 | 0.163 | 65.1 | 0.075 | 423.0 | 0.168 | 66.0 |
| 100 × 3 | 0.039 | 453.0 | 0.077 | 87.0 | 0.041 | 453.0 | 0.090 | 87.0 | 0.048 | 459.0 | 0.131 | 87.0 |
| 0.036 | 453.0 | 0.060 | 87.0 | 0.036 | 444.0 | 0.070 | 93.0 | 0.041 | 462.0 | 0.097 | 87.0 | |
| 0.040 | 462.0 | 0.091 | 87.0 | 0.039 | 462.0 | 0.093 | 87.0 | 0.040 | 462.0 | 0.081 | 90.0 | |
| 0.043 | 462.0 | 0.093 | 87.0 | 0.046 | 459.0 | 0.095 | 87.0 | 0.037 | 450.0 | 0.091 | 90.0 | |
| 0.032 | 447.0 | 0.072 | 87.0 | 0.046 | 450.0 | 0.113 | 87.0 | 0.034 | 471.0 | 0.069 | 90.0 | |
| 0.035 | 444.0 | 0.075 | 93.0 | 0.030 | 456.0 | 0.058 | 87.0 | 0.037 | 459.0 | 0.080 | 96.0 | |
| 0.036 | 456.0 | 0.098 | 90.0 | 0.042 | 486.0 | 0.086 | 90.0 | 0.035 | 552.0 | 0.065 | 99.0 | |
| 0.043 | 471.0 | 0.094 | 90.0 | 0.041 | 447.0 | 0.079 | 102.0 | 0.058 | 486.0 | 0.112 | 87.0 | |
| 0.036 | 462.0 | 0.070 | 87.0 | 0.043 | 456.0 | 0.109 | 87.0 | 0.039 | 453.0 | 0.085 | 87.0 | |
| 0.035 | 462.0 | 0.076 | 93.0 | 0.036 | 453.0 | 0.072 | 84.0 | 0.039 | 441.0 | 0.100 | 96.0 | |
| Average | 0.038 | 457.2 | 0.081 | 88.8 | 0.040 | 456.6 | 0.086 | 89.1 | 0.041 | 469.5 | 0.091 | 90.9 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hsu, H.-P.; Chiang, T.-L.; Wang, C.-N.; Fu, H.-P.; Chou, C.-C. A Hybrid GA with Variable Quay Crane Assignment for Solving Berth Allocation Problem and Quay Crane Assignment Problem Simultaneously. Sustainability 2019, 11, 2018. https://doi.org/10.3390/su11072018
Hsu H-P, Chiang T-L, Wang C-N, Fu H-P, Chou C-C. A Hybrid GA with Variable Quay Crane Assignment for Solving Berth Allocation Problem and Quay Crane Assignment Problem Simultaneously. Sustainability. 2019; 11(7):2018. https://doi.org/10.3390/su11072018
Chicago/Turabian StyleHsu, Hsien-Pin, Tai-Lin Chiang, Chia-Nan Wang, Hsin-Pin Fu, and Chien-Chang Chou. 2019. "A Hybrid GA with Variable Quay Crane Assignment for Solving Berth Allocation Problem and Quay Crane Assignment Problem Simultaneously" Sustainability 11, no. 7: 2018. https://doi.org/10.3390/su11072018
APA StyleHsu, H. -P., Chiang, T. -L., Wang, C. -N., Fu, H. -P., & Chou, C. -C. (2019). A Hybrid GA with Variable Quay Crane Assignment for Solving Berth Allocation Problem and Quay Crane Assignment Problem Simultaneously. Sustainability, 11(7), 2018. https://doi.org/10.3390/su11072018