Riding Comfort Evaluation Based on Longitudinal Acceleration for Urban Rail Transit—Mathematical Models and Experiments in Beijing Subway


Abstract
:1. Introduction
2. Comfort Measurement Models Based on Fuzzy Sets
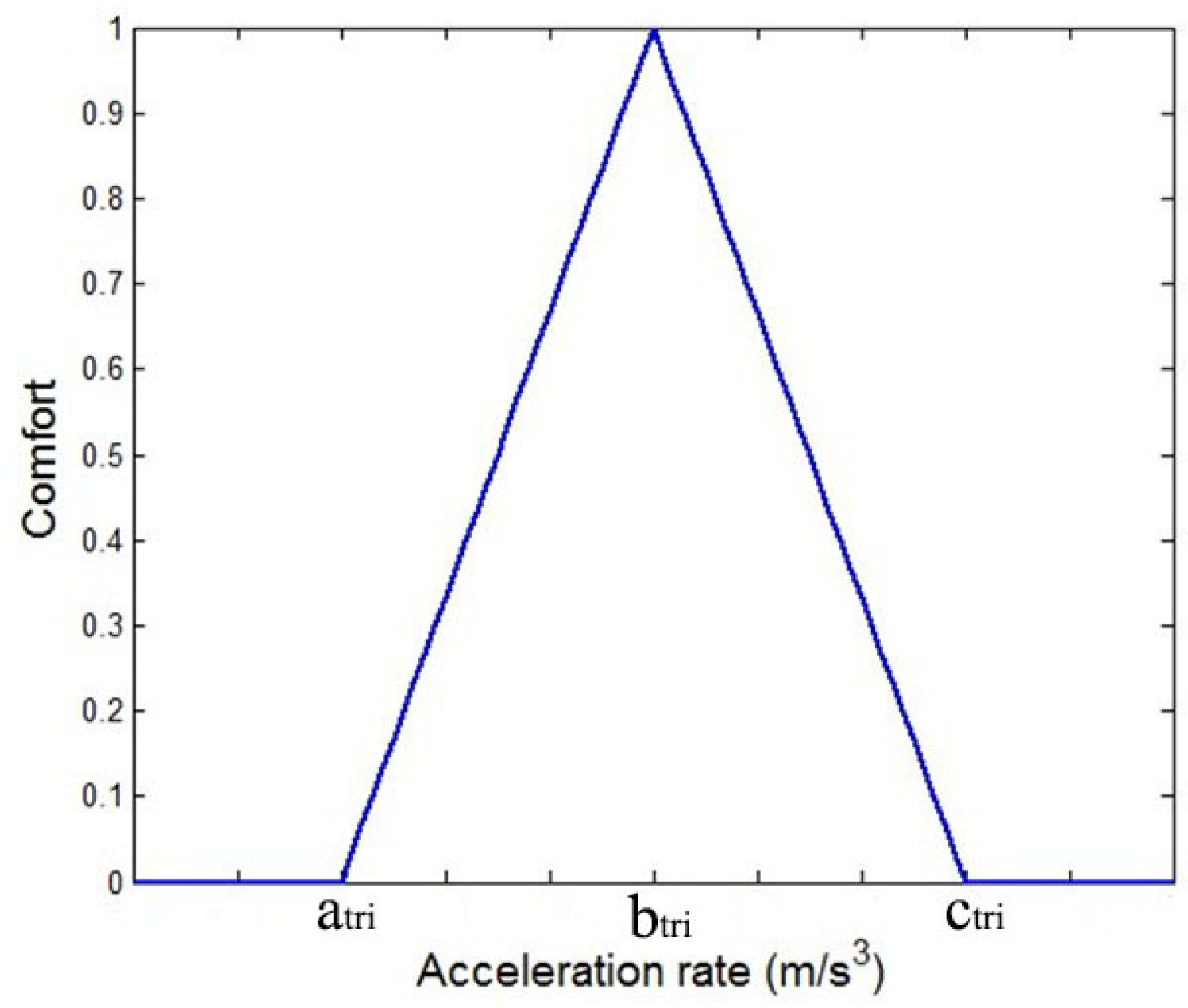
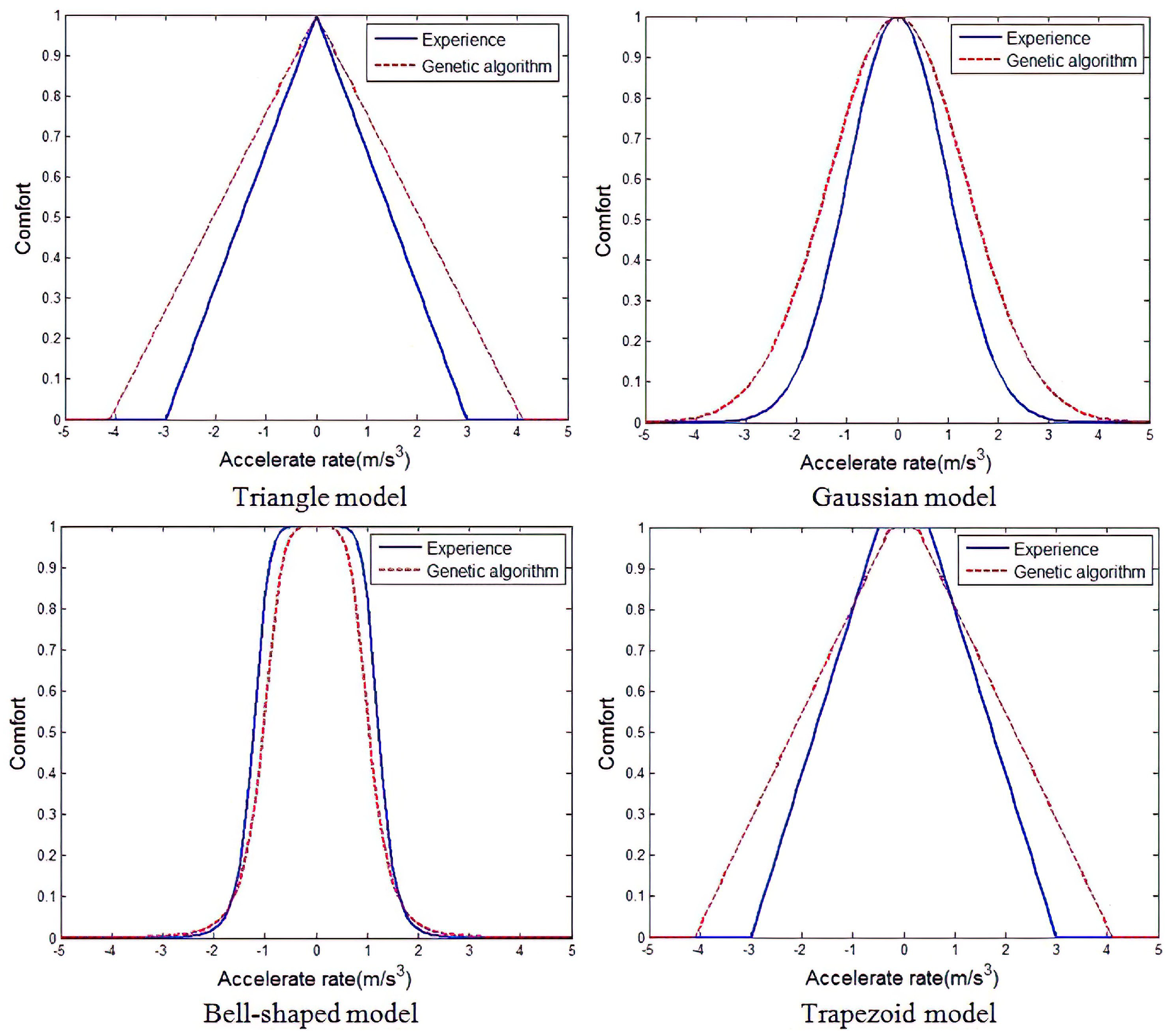
2.1. Triangular Fuzzy Set Model
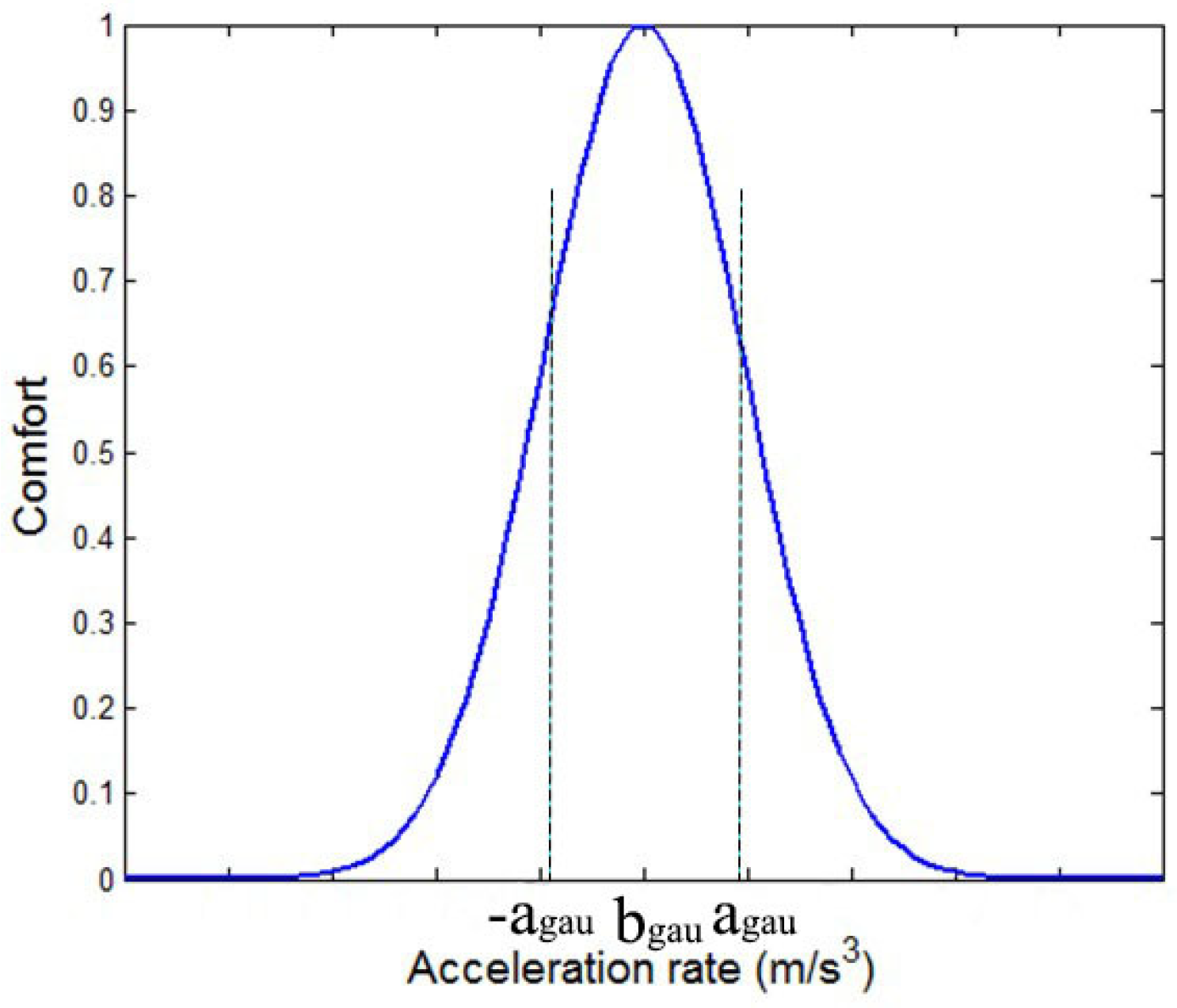
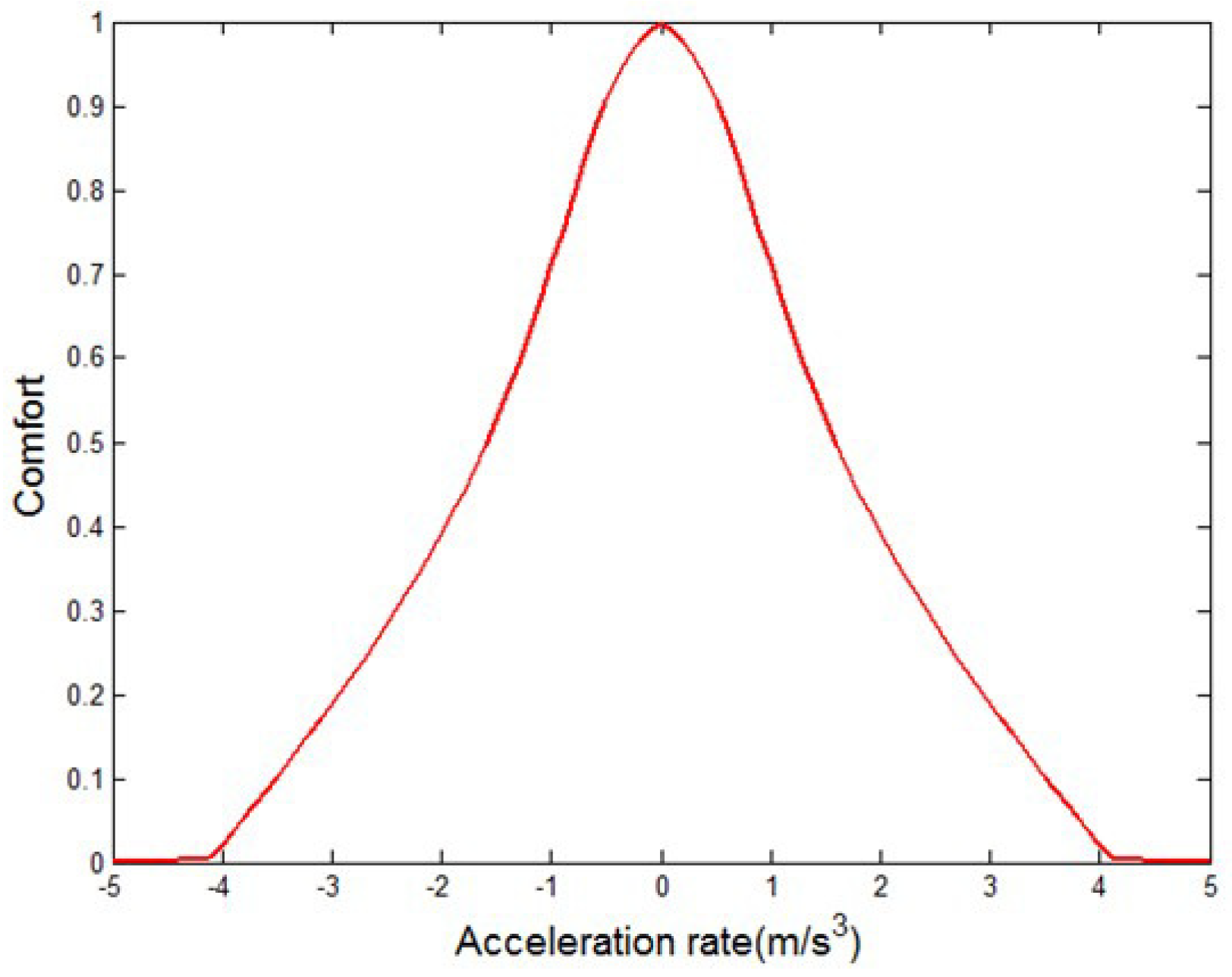
2.2. Gaussian Fuzzy Set Model
2.3. Bell-Shaped Fuzzy Set Model
2.4. Trapezoidal Fuzzy Set Model
3. Model Evaluation Based on Field Data
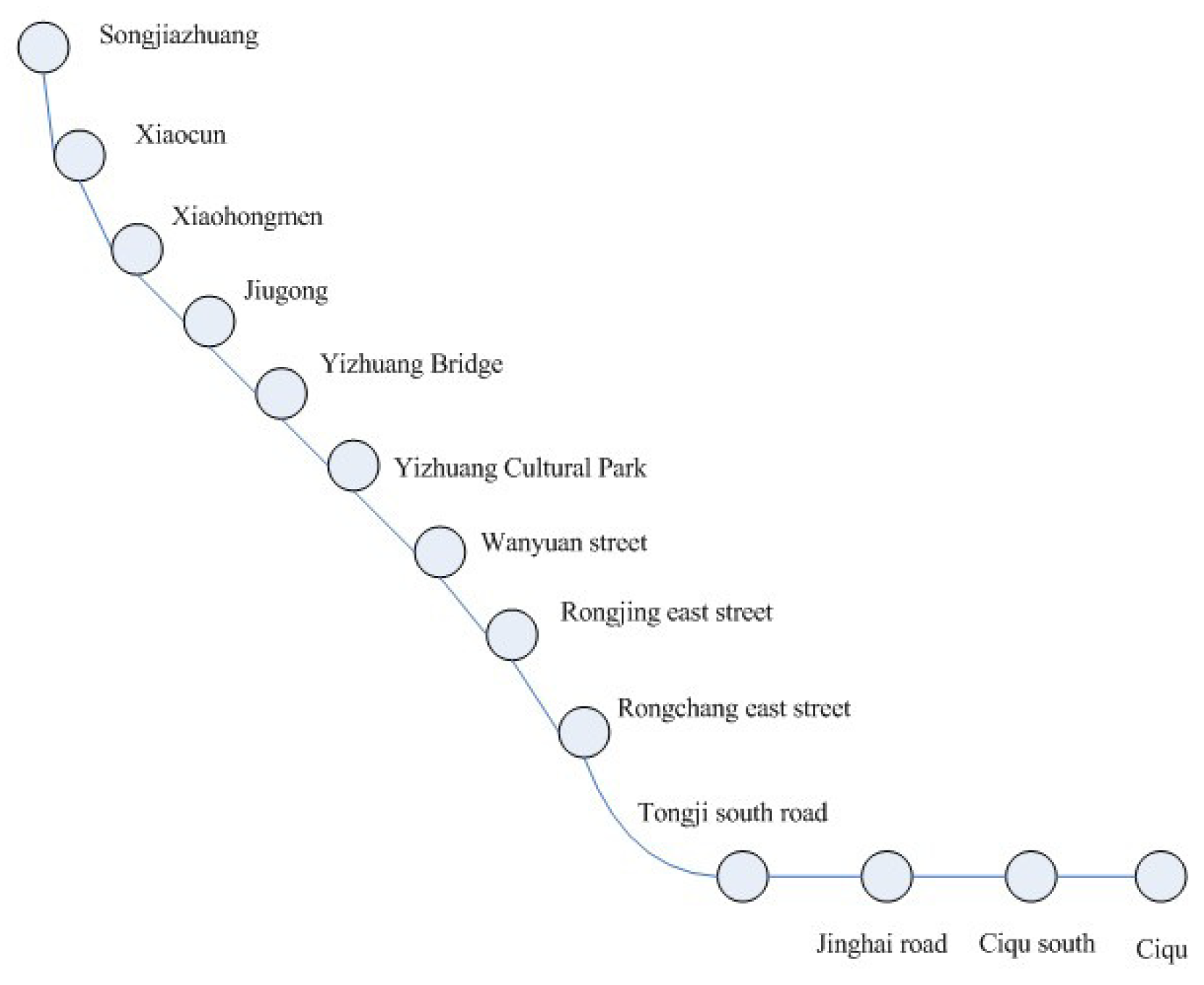
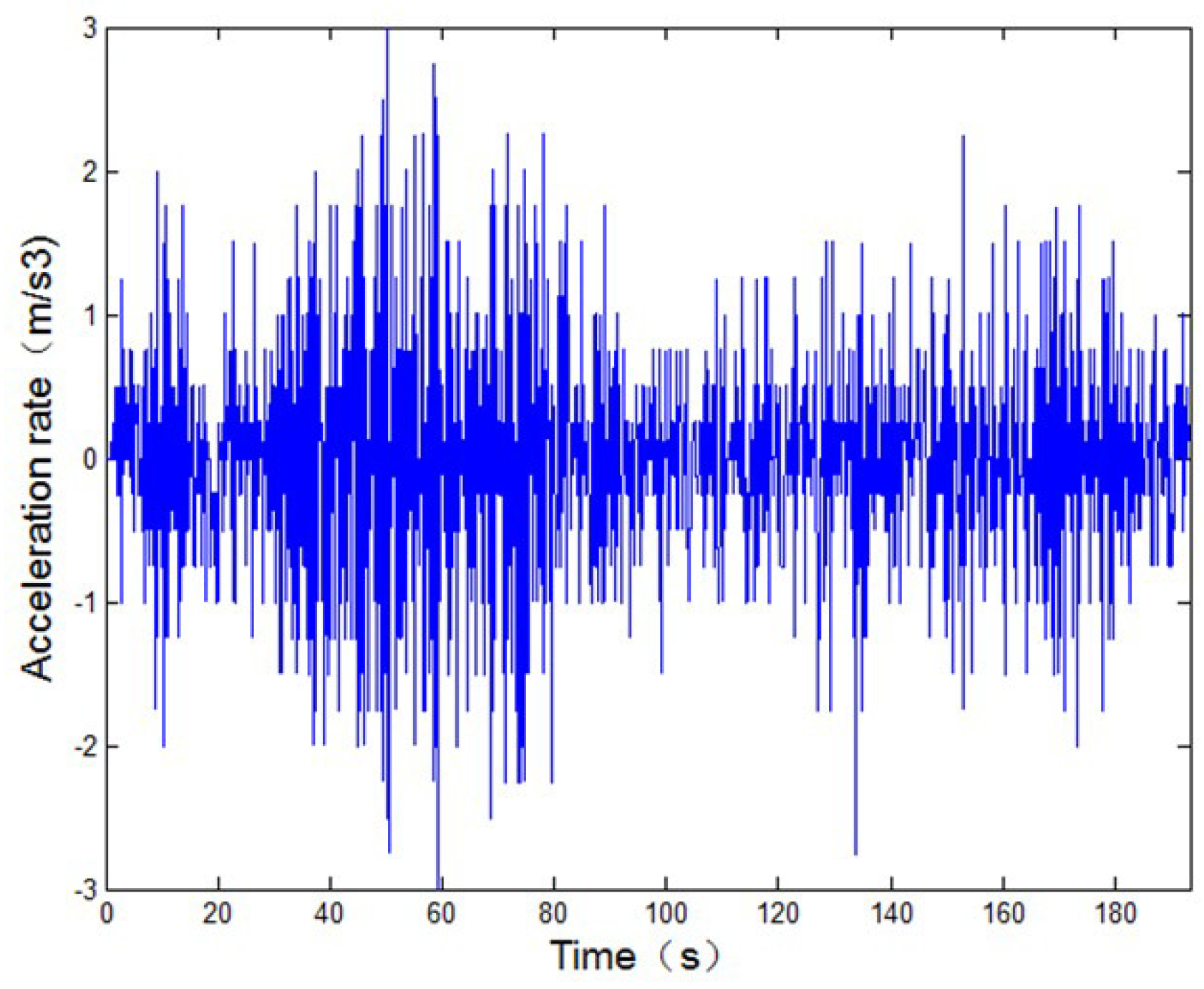
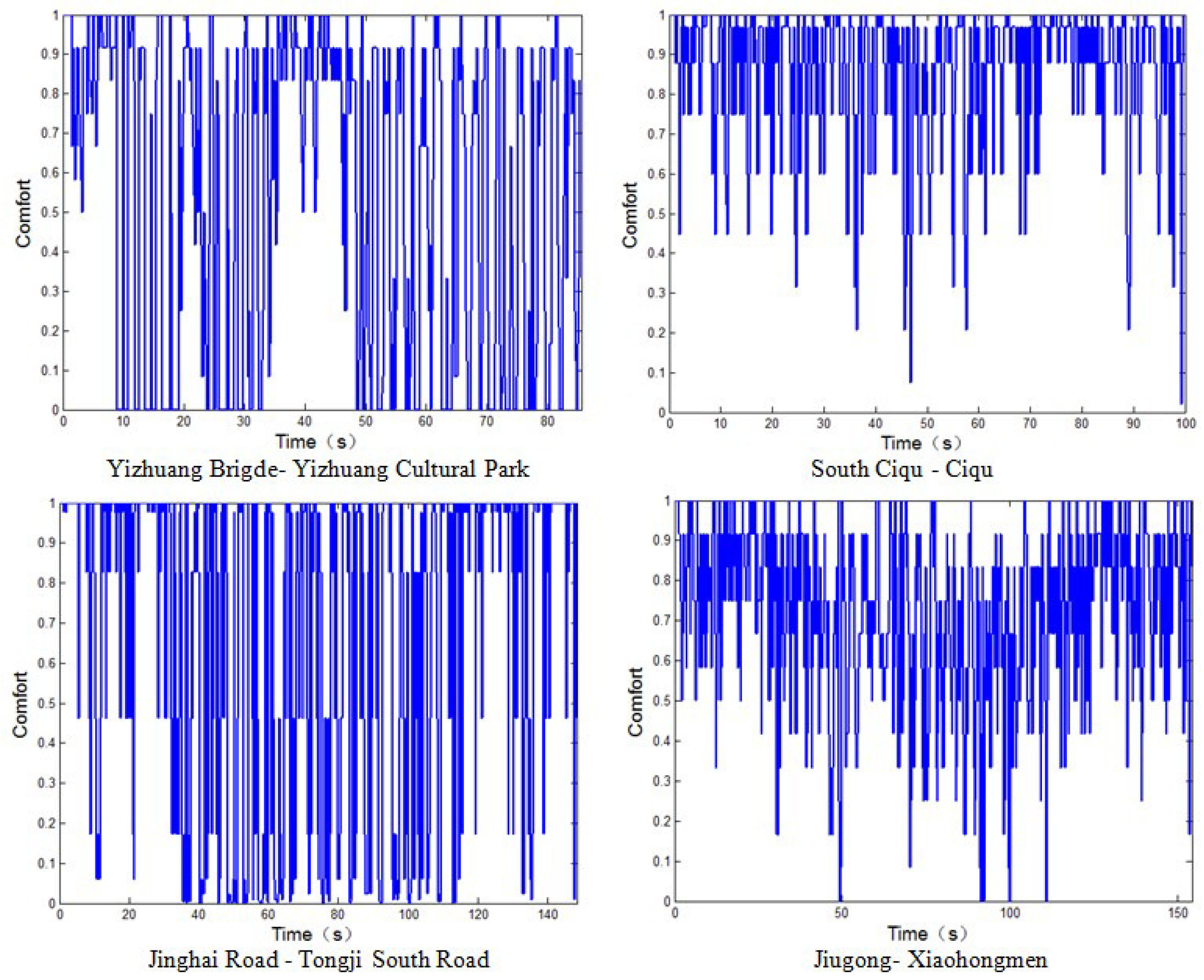
3.1. Field Data Description
3.2. Model Evaluation Based on Train Acceleration Data
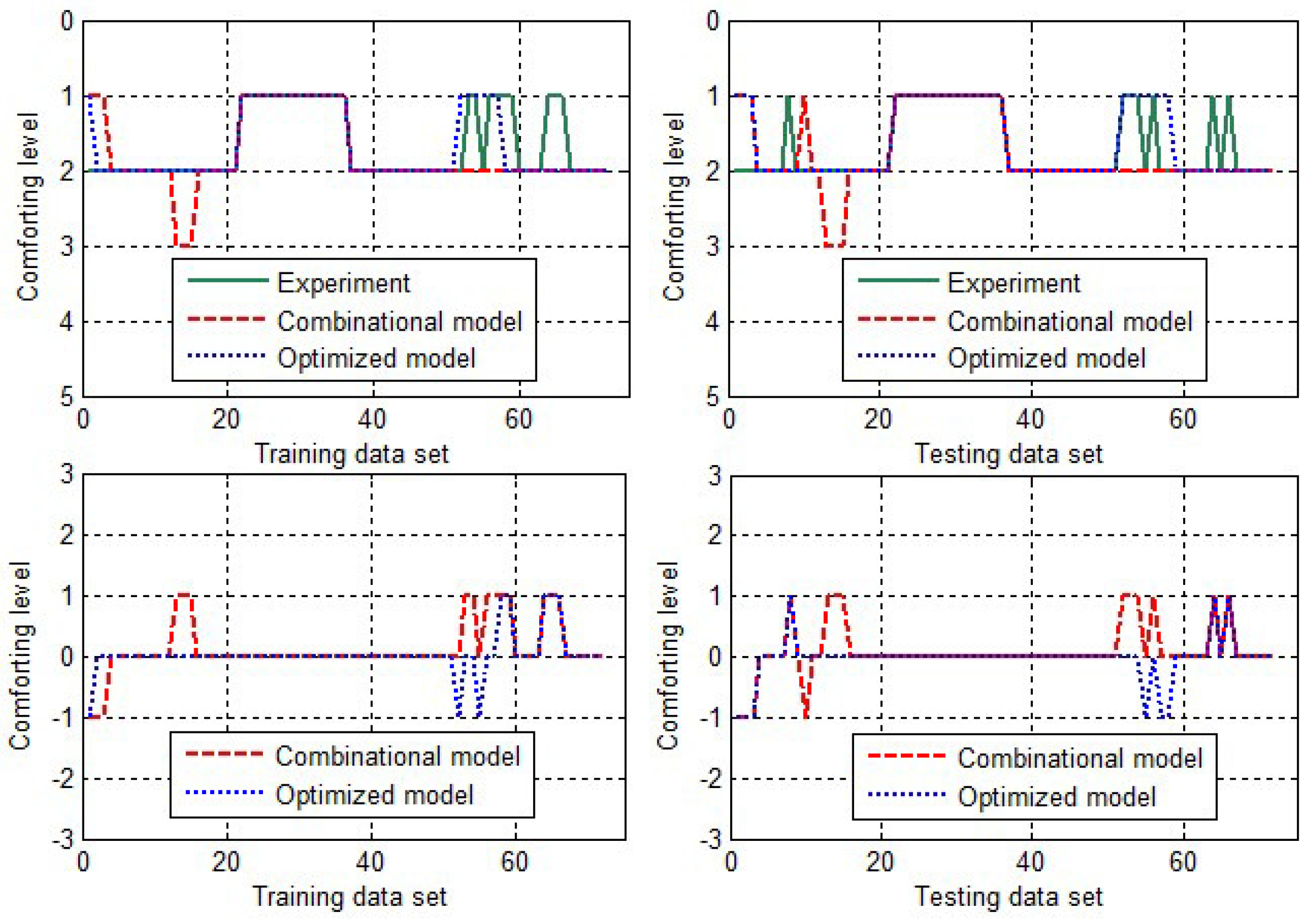
3.3. Model Validation Based on Passenger Feedback Data
4. Optimizing Parameters Based on a Meta-Heuristic Algorithm
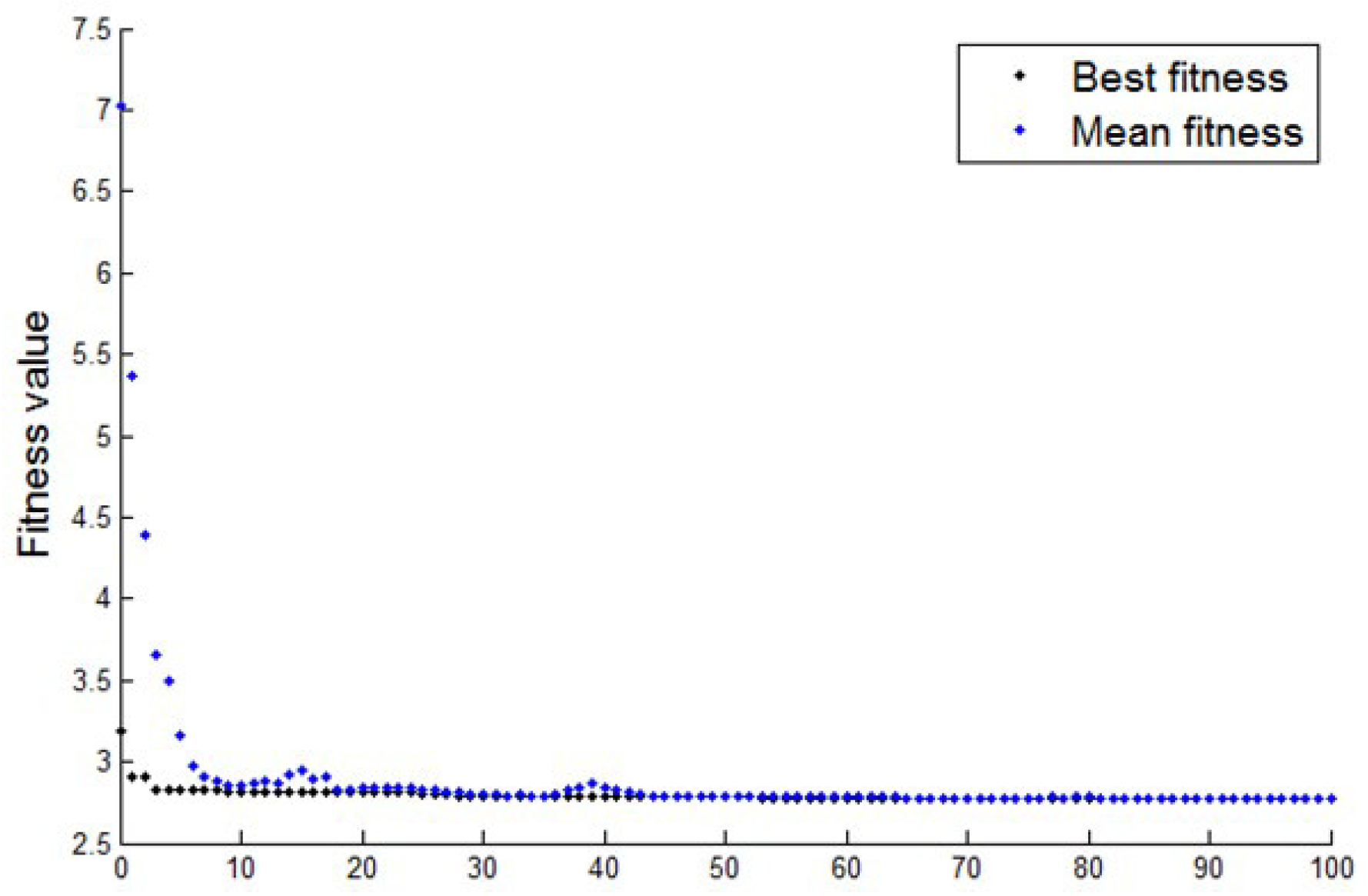
4.1. Genetic Algorithm and Fitness Function for Riding Comfort
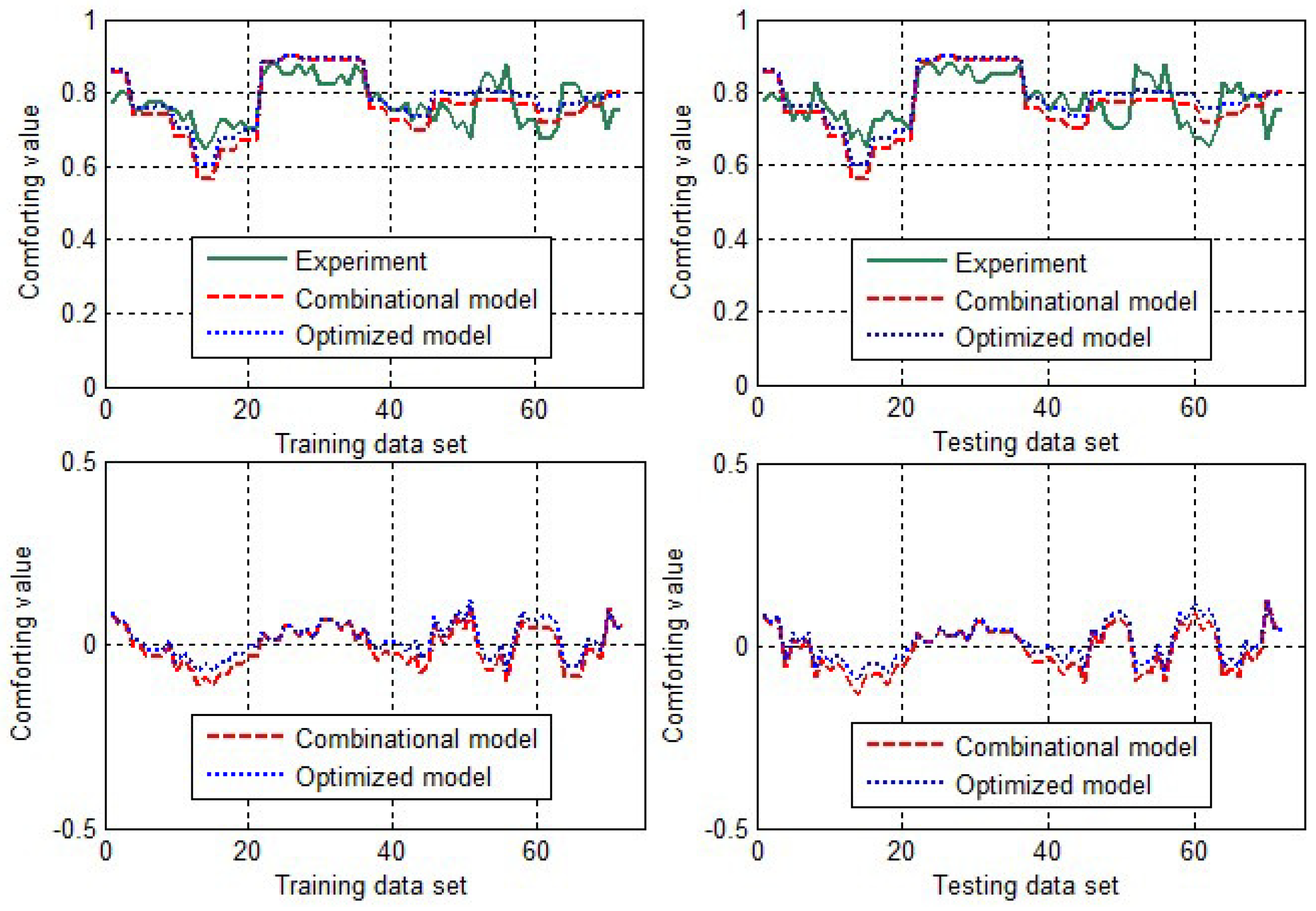
4.2. Optimization Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ohnmacht, T.; Scherer, M. More Comfort, Shorter Travel Time, or Low Fares? Comparing Rail Transit Preferences of Commuters, Holiday and Leisure Travelers, Business Travelers, and Shoppers in Switzerland. Transp. Res. Rec. Transp. Res. Board Oct. 2010, 2143, 100–107. [Google Scholar] [CrossRef]
- Ren, W.-X.; Zong, Z.-H. Output-only Experimental model parameter identification of civil engineering structures. Int. J. Struct. Eng. Mech. 2004, 17, 429–444. [Google Scholar] [CrossRef] [Green Version]
- Suzuki, H. Recent Research and Developments in the Field of Riding Comfort Evaluation; Quarterly Reports; Railway Technical Research Institute: Tokyo, Japan, 1996; Volume 37, pp. 4–8. [Google Scholar]
- Suzuki, H. Research trends on riding comfort evaluation in Japan. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Trans. 1998, 212, 61–72. [Google Scholar] [CrossRef]
- Suzuki, H. Effects of the range and frequency of vibrations on the momentary riding comfort evaluation of a railway vehicle. Jpn. Psychol. Res. 1998, 40, 156–165. [Google Scholar] [CrossRef]
- Inagaki, H.; Taguchi, T.; Yasuda, E.; Iizuka, Y. Evaluation of riding comfort: From the viewpoint of interaction of human body and seat for static, dynamic and long time driving. SAE Trans. 2000, 960–964. [Google Scholar]
- Burnfield, J.M.; Shu, Y. Impact of Elliptical Trainer Ergonomic Modifications on Perceptions of Safety, Comfort, Workout, and Usability for People With Physical Disabilities and Chronic Conditions. Phys. Ther. 2011, 91, 1604–1608. [Google Scholar] [CrossRef] [Green Version]
- Iwnicki, S. Handbook of Railway Vehicle Dynamics; CRC: Boca Raton, FL, USA, 2006. [Google Scholar]
- Song, Y.; Liu, Z.; Rxnnquist, A.; Navik, P.; Liu, Z. Contact Wire Irregularity Stochastics and Effect on High-speed Railway Pantograph-Catenary Interactions. IEEE Trans. Instrum. Meas. 2020, in press. [Google Scholar] [CrossRef]
- Kaewunruen, S.; Martin, V. Life cycle assessment of railway ground-borne noise and vibration mitigation methods using geosynthetics, metamaterials and ground improvement. Sustainability 2018, 10, 3753. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Song, Y.; Yin, Z.; Wang, R.; Zhang, W. Random response analysis of axle-box bearing of a high-speed train excited by crosswinds and track irregularities. IEEE Trans. Veh. Technol. 2019, 68, 10607–10617. [Google Scholar] [CrossRef] [Green Version]
- Yin, J.T.; Su, S.; Xun, J.; Tang, T.; Liu, R. Data-driven approaches for modeling train control models: Comparison and case studies. ISA Trans. 2020, 98, 349–363. [Google Scholar] [CrossRef]
- Smith, C.C.; McGehee, D.Y.; Healey, A.J. The prediction of passenger riding comfort from acceleration data. J. Dyn. Syst. Meas. Control 1978, 100, 34–41. [Google Scholar] [CrossRef] [Green Version]
- Linz, S.J. Nonlinear dynamical models and jerky motion. Am. J. Phys. 1997, 65, 523–526. [Google Scholar] [CrossRef]
- Yin, J.T.; Chen, D.W.; Li, L. Intelligent train operation algorithms for subway by expert system and reinforcement learning. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2561–2571. [Google Scholar] [CrossRef]
- Yin, J.T.; Tang, T.; Yang, L.; Xun, J.; Huang, Y.; Gao, Z. Research and development of automatic train operation for railway transportation systems: A survey. Transp. Res. Part C Emerg. Technol. 2017, 85, 548–572. [Google Scholar] [CrossRef]
- Chang, C.S.; Sim, S.S. Optimising train movements through coast control using genetic algorithms. IEE Proc. Electr. Power Appl. 1997, 144, 65–73. [Google Scholar] [CrossRef]
- Zadeh, L.A. Outline of a New Approach to the Analysis of Complex Systems and Decision Processes. IEEE Trans. Syst. Man Cybern. 1973, 3, 28–44. [Google Scholar] [CrossRef] [Green Version]
- Gray, A.W.; Daniels, A.S.; Singer, D.J. Impacts of Fuzzy Logic Modeling for Constraints Opimization. Nav. Eng. J. 2011, 112, 121–132. [Google Scholar]
- Ancker, J.S.; Kern, L.M.; Abramson, E. The Triangle Model for evaluating the effect of health information technology on healthcare quality and safety. J. Am. Med. Inform. Assoc. 2012, 19, 61–65. [Google Scholar] [CrossRef] [Green Version]
- Long, D.; Singh, V.P.; Scanlon, B.R. Deriving theoretical boundaries to address scale dependencies of triangle models for evapotranspiration estimation. J. Geophys. Res. Atmos. 2012, 117, 1–17. [Google Scholar] [CrossRef]
- Darias, J.R.; Sanchez, I.; Gutierrez, G. Experimental study on the vertical motion of grains in a vibrated U-tube. Granul. Matter 2011, 113, 13–17. [Google Scholar] [CrossRef]
- Patil, S.D.; Takale, M.V. Relativistic self-focusing of cosh-Gaussian laser beams in a plasma. Opt. Laser Technol. 2012, 44, 314–317. [Google Scholar] [CrossRef]
- Birg, L.; Massart, P. Gaussian model selection. J. Eur. Math. Soc. 2001, 3, 203–268. [Google Scholar] [CrossRef] [Green Version]
- Kiriakidis, K. On the Expansion of Nonlinear Models Using Bell-Shaped Basis Functions; ASME: New York, NY, USA, 2003. [Google Scholar]
- Santika, T.; Hutchinson, M.F. The effect of species response form on species distribution model prediction and inference. Ecol. Model. 2009, 220, 2365–2379. [Google Scholar] [CrossRef]
- Cheng, M.; Zhang, B.; Wang, G. Optimal policy for deteriorating items with trapezoidal type demand and partial backlogging. Appl. Math. Model. 2011, 35, 3552–3560. [Google Scholar] [CrossRef]
- Chung, K.J. The correct process of arguments of the solution procedure on the inventory model for deteriorating items with trapezoidal type demand rate in supply chain management. Appl. Math. Lett. 2012, 25, 1901–1905. [Google Scholar] [CrossRef] [Green Version]
- Dietterich, T.G. Machine Learning Research: Four Current Directions. AI Mag. 1997, 18, 97–136. [Google Scholar]
- Goldberg, D.E.; Holland, J.H. Genetic algorithms and machine learning. Mach. Learn. 1988, 3, 95–99. [Google Scholar] [CrossRef]
- Holland, J.H. Genetic algorithms. Sci. Am. 1992, 267, 66–72. [Google Scholar] [CrossRef]
- Booker, L.B.; Goldberg, D.E.; Holland, J.H. Classifier systems and genetic algorithms. Artif. Intell. 1989, 40, 235–282. [Google Scholar] [CrossRef]
- Joachim, S. Parallel Genetic Algorithms: Theory and Applications; IOS Press: Amsterdam, The Netherlands, 1993. [Google Scholar]
- Man, K.F.; Tang, K.S.; Kwong, S. Genetic Algorithms: Concepts and Designs; Springer: London, UK, 1999. [Google Scholar]
- Huang, Y.; Yu, H.; Yin, J.; Hu, H.; Bai, S.; Meng, X.; Wang, M. An integrated approach for the energy-efficient driving strategy optimization of multiple trains by considering regenerative braking. Comput. Ind. Eng. 2018, 126, 399–409. [Google Scholar] [CrossRef]
- Lyons, G.; Hammond, P.; Mackay, K. Reprint of: The importance of user perspective in the evolution of MaaS. Transp. Res. Part A 2020, 131, 20–34. [Google Scholar] [CrossRef]
- Huang, Y.R.; Mannino, C.; Yang, L.; Tang, T. Coupling time-indexed and big- M formulations for real-time train scheduling during metro service disruptions. Transp. Res. Part B 2020, 133, 38–61. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Value | >0.8 | 0.6–0.8 | 0.4–0.6 | 0.2–0.4 | <0.2 |
|---|---|---|---|---|---|
| Level | 1 | 2 | 3 | 4 | 5 |
| Comfort description | Very comfortable | Quite comfortable | Slightly uncomfortable | Less comfortable | Very uncomfortable |
| Block | U5 | U12 | D10 | D3 | |
|---|---|---|---|---|---|
| V | Triangular | 0.547 | 0.836 | 0.745 | 0.77 |
| Gaussian | 0.535 | 0.845 | 0.713 | 0.75 | |
| Bell-shaped | 0.568 | 0.931 | 0.651 | 0.702 | |
| Trapezoidal | 0.609 | 0.941 | 0.806 | 0.833 | |
| Average | 0.565 | 0.888 | 0.746 | 0.779 | |
| Comfort Level | 3 | 1 | 2 | 2 | |
| Block | U5 | U12 | D10 | D3 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Time | Mor | Aft | Eve | Mor | Aft | Eve | Mor | Aft | Eve | Mor | Aft | Eve |
| 1 (1) 2 (5) 3 (2) | 2 (6) 3 (2) | 2 (7) 3 (1) | 1 (6) 2 (1) 3 (1) | 1 (7) 2 (1) | 1 (6) 2 (2) | 1 (2) 2 (5) 3 (1) | 1 (3) 2 (5) | 1 (3) 2 (4) 3 (1) | 1 (5) 2 (3) | 1 (4) 2 (4) | 1 (5) 2 (3) | |
| 0.675 | 0.65 | 0.675 | 0.825 | 0.875 | 0.85 | 0.75 | 0.75 | 0.8 | 0.825 | 0.8 | 0.825 | |
| Block | U5 | U12 | D10 | D3 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Time | Mor | Aft | Eve | Mor | Aft | Eve | Mor | Aft | Eve | Mor | Aft | Eve | |
| L | Experiment | 2 | 2 | 2 | 1 | 1 | 1 | 2 | 2 | 2 | 1 | 2 | 1 |
| Triangle | 3 | 3 | 3 | 1 | 1 | 1 | 2 | 2 | 2 | 2 | 2 | 2 | |
| Gaussian | 3 | 3 | 3 | 1 | 1 | 1 | 2 | 2 | 2 | 2 | 2 | 2 | |
| Bell-shaped | 3 | 3 | 3 | 1 | 1 | 1 | 2 | 2 | 2 | 2 | 2 | 2 | |
| Trapezoid | 2 | 2 | 2 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | |
| Triangle | 0.128 | 0.103 | 0.128 | 0.011 | 0.039 | 0.014 | 0.005 | 0.005 | 0.055 | 0.048 | 0.023 | 0.048 | |
| Gaussian | 0.141 | 0.116 | 0.141 | 0.02 | 0.03 | 0.005 | 0.037 | 0.037 | 0.087 | 0.075 | 0.05 | 0.075 | |
| Bell-shaped | 0.107 | 0.082 | 0.107 | 0.106 | 0.056 | 0.081 | 0.099 | 0.099 | 0.149 | 0.123 | 0.098 | 0.123 | |
| Trapezoid | 0.066 | 0.041 | 0.066 | 0.116 | 0.066 | 0.091 | 0.056 | 0.056 | 0.006 | 0.008 | 0.033 | 0.008 | |
| Block | U5 | U12 | D10 | D3 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Time | Mor | Aft | Eve | Mor | Aft | Eve | Mor | Aft | Eve | Mor | Aft | Eve | |
| L | Experiment | 2 | 2 | 2 | 1 | 1 | 1 | 2 | 2 | 2 | 1 | 2 | 1 |
| Combination | 3 | 3 | 3 | 1 | 1 | 1 | 2 | 2 | 2 | 2 | 2 | 2 | |
| 0.11 | 0.085 | 0.11 | 0.063 | 0.013 | 0.038 | 0.004 | 0.004 | 0.054 | 0.046 | 0.021 | 0.046 | ||
| Training Set | Testing Set | |||
|---|---|---|---|---|
| Triangle | 76.4% | 0.0535 | 79.2% | 0.0553 |
| Gaussian | 76.4% | 0.0626 | 75% | 0.0659 |
| Bell-shaped | 77.8% | 0.0598 | 73.6% | 0.0633 |
| Trapezoid | 72.5% | 0.0686 | 75.3% | 0.0619 |
| Combination | 78.2% | 0.0515 | 79.8% | 0.0527 |
| Experience | 0.25 | 0.25 | 0.25 | 0.25 | 0.5 | 3 | 3.708 |
| GA | 0.331 | 0.229 | 0.253 | 0.187 | 0.263 | 4.108 | 2.778 |
| Training Set | Testing Set | |||||||
|---|---|---|---|---|---|---|---|---|
| Combination | 77.8% | 0.125 | 0.2083 | 0.4390 | 79.2% | 0.0833 | 0.1944 | 0.4330 |
| Optimization | 88.8% | 0.0478 | 0.1111 | 0.3322 | 87.5% | -0.04 | 0.125 | 0.3511 |
| Improvement | 14.1% | 61.8% | 46.7% | 24.4% | 10.4% | 51.9% | 35.7% | 18.9% |
| Training Set | Testing Set | |||||
|---|---|---|---|---|---|---|
| Combination | −0.086 | 0.0515 | 0.0546 | −0.0094 | 0.0527 | 0.0603 |
| Optimization | 0.079 | 0.0406 | 0.0472 | 0.0091 | 0.0447 | 0.0530 |
| Improvement | 8.1% | 21.2% | 13.6% | 3.2% | 15.2% | 12.2% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, H.; Chen, D.; Yin, J. Riding Comfort Evaluation Based on Longitudinal Acceleration for Urban Rail Transit—Mathematical Models and Experiments in Beijing Subway. Sustainability 2020, 12, 4541. https://doi.org/10.3390/su12114541
Ma H, Chen D, Yin J. Riding Comfort Evaluation Based on Longitudinal Acceleration for Urban Rail Transit—Mathematical Models and Experiments in Beijing Subway. Sustainability. 2020; 12(11):4541. https://doi.org/10.3390/su12114541
Chicago/Turabian StyleMa, Huiru, Dewang Chen, and Jiateng Yin. 2020. "Riding Comfort Evaluation Based on Longitudinal Acceleration for Urban Rail Transit—Mathematical Models and Experiments in Beijing Subway" Sustainability 12, no. 11: 4541. https://doi.org/10.3390/su12114541
APA StyleMa, H., Chen, D., & Yin, J. (2020). Riding Comfort Evaluation Based on Longitudinal Acceleration for Urban Rail Transit—Mathematical Models and Experiments in Beijing Subway. Sustainability, 12(11), 4541. https://doi.org/10.3390/su12114541