Model of Third-Party Risk Index for Unmanned Aerial Vehicle Delivery in Urban Environment


Abstract
:1. Introduction
2. Literature Review
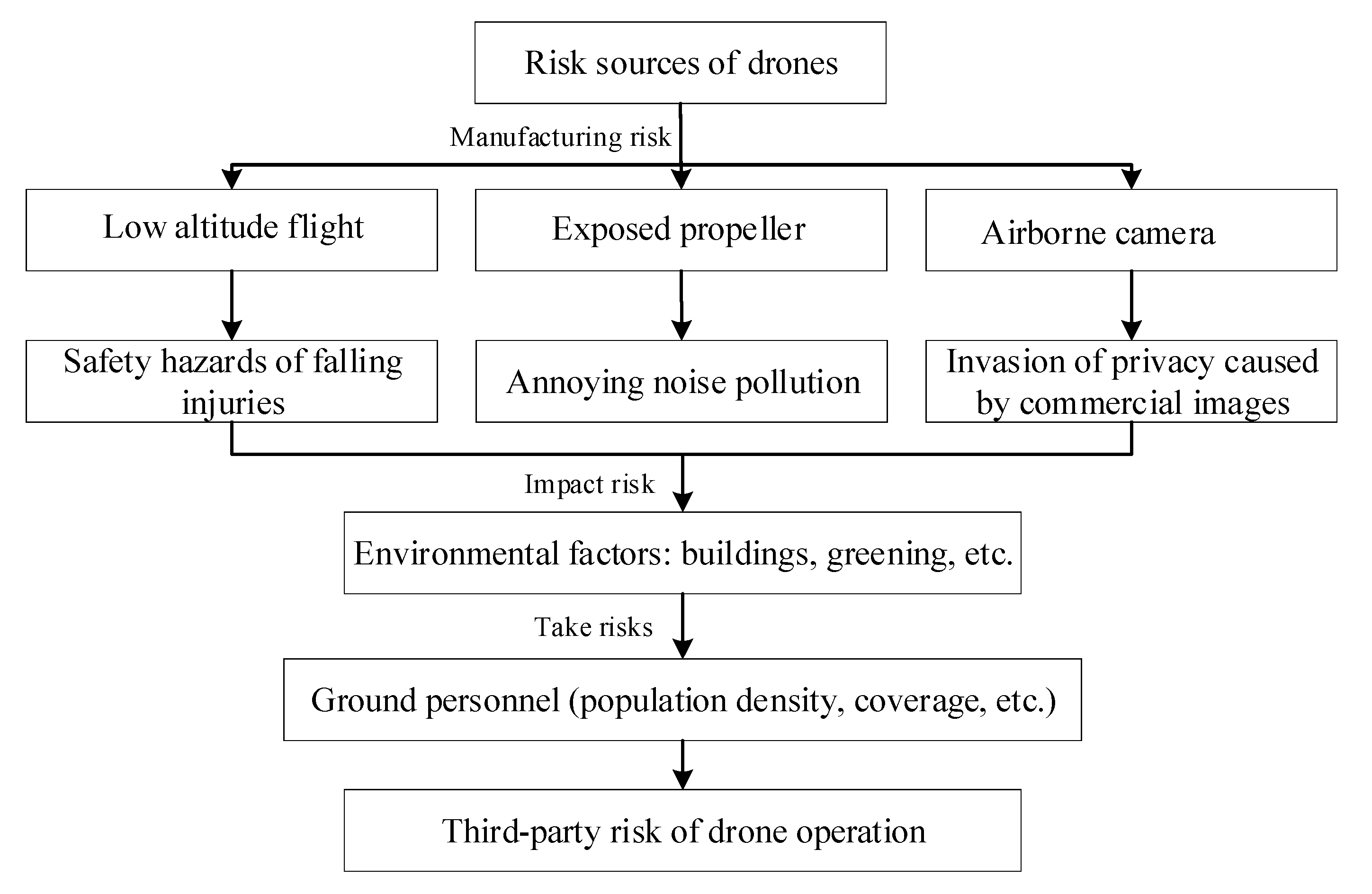
3. Third-Party Risks of UAVs and Effect Mechanism of Risk Sources
3.1. Third-Party Risks of UAVs
3.2. Mechanism of Third-Party Risk Source of UAV in Urban Logistics Operation
4. Third-Party Risk Index Model of UAV Delivery in Operation Area
4.1. Three-Dimensional Grid Division Based on Image Privacy Standards
4.2. Injury Risk Index Model under Three-Dimensional Grid
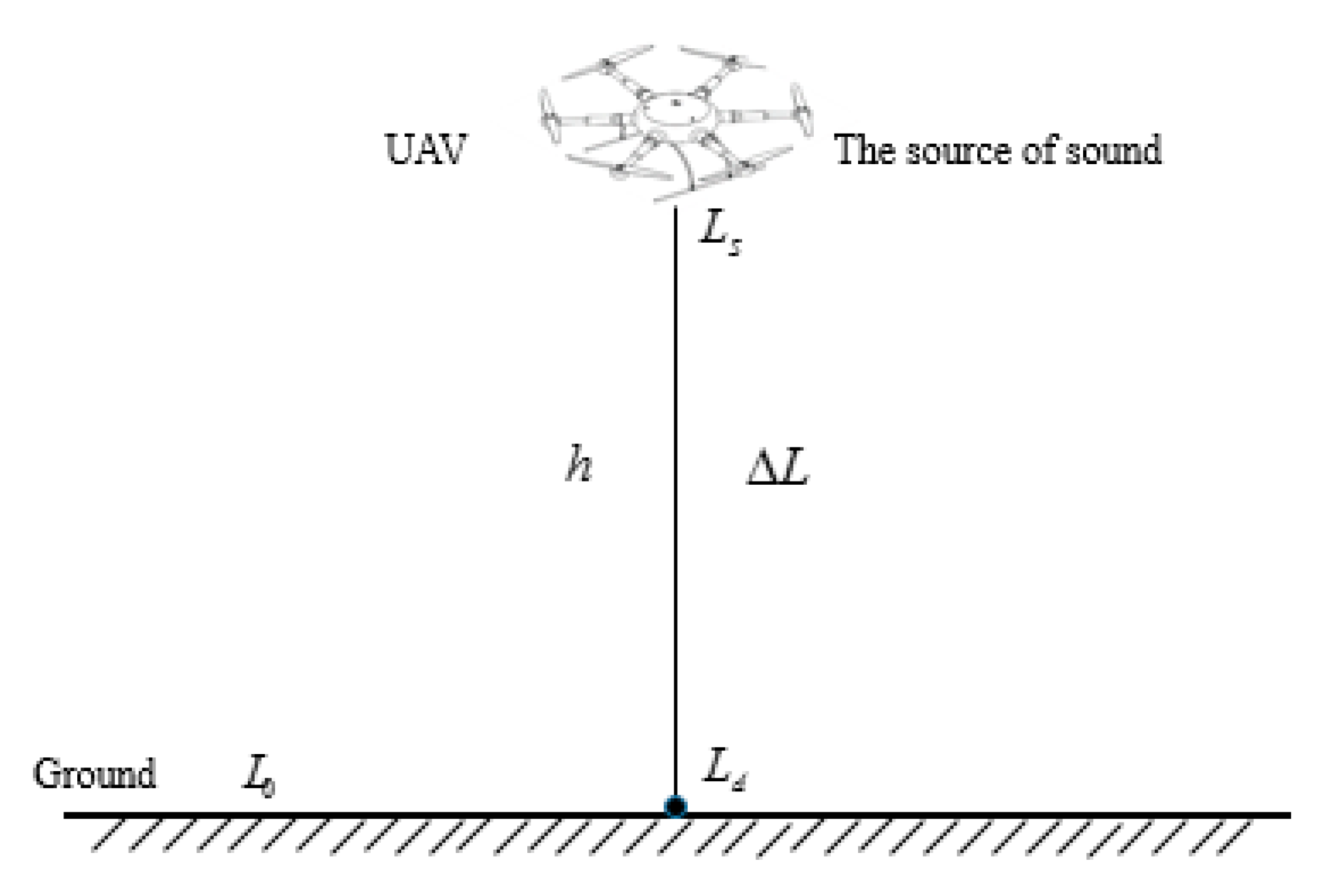
4.3. Noise Risk Index Model of Three-Dimensional Grid
4.4. Comprehensive Third-Party Risk Index Model
5. Case Study
5.1. UAV Selection
5.2. Example Scenario Description and Grid Ddivision
5.2.1. Example Scenario Description
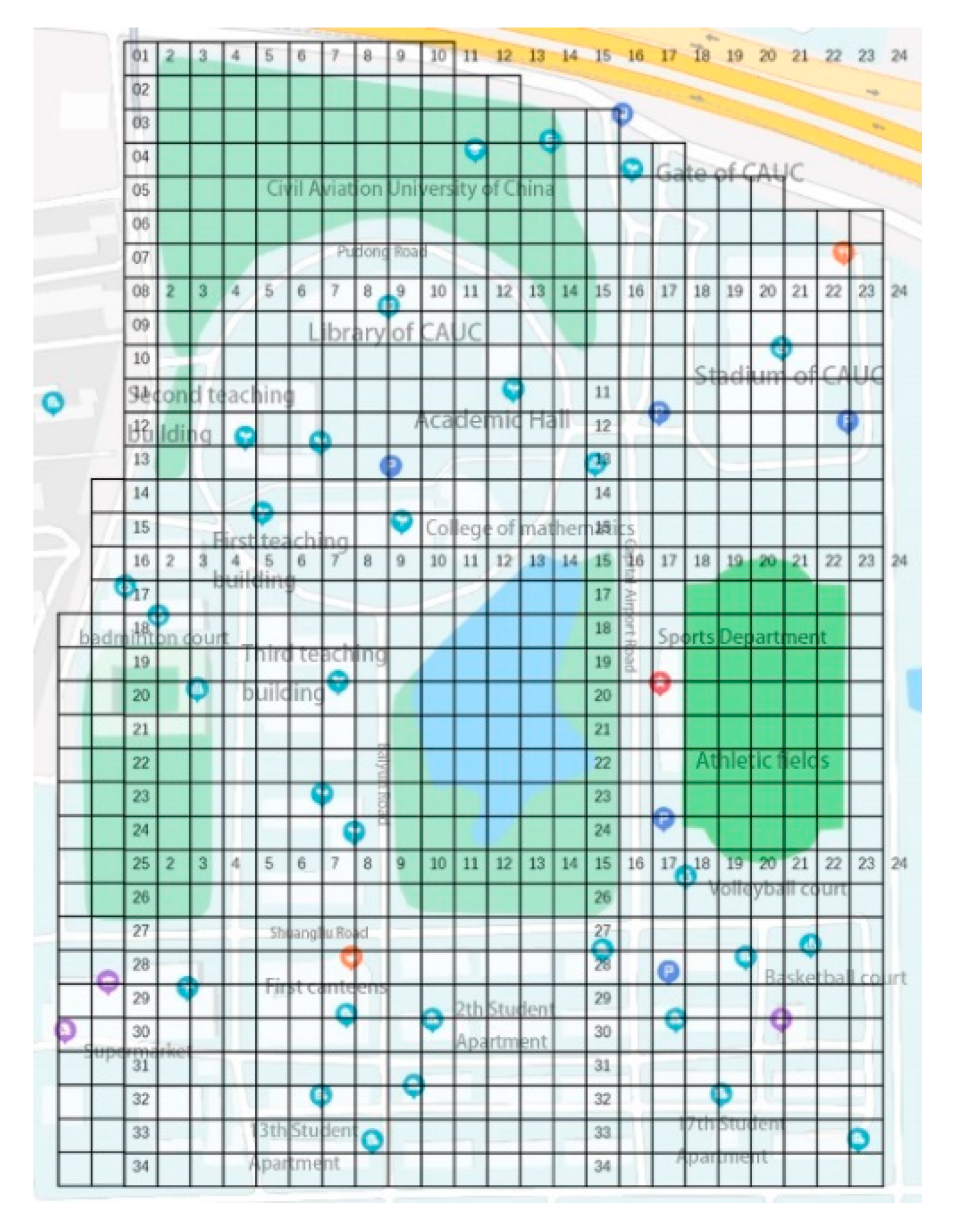
5.2.2. Example Scenario Grid Division
5.3. Example Scenario (Southern District of CAUC) Surface Data
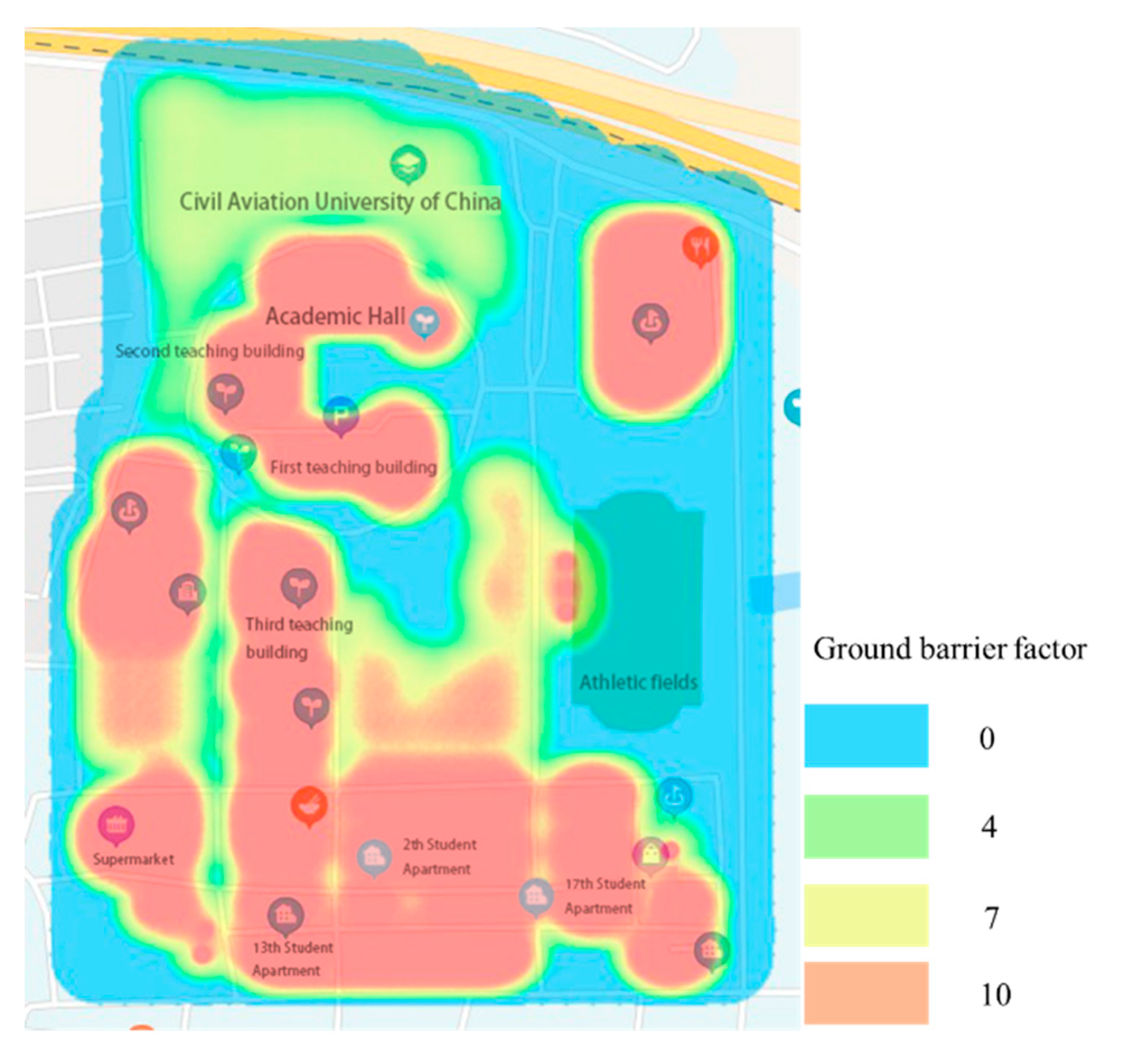
5.3.1. Barrier Factor
5.3.2. Population Density
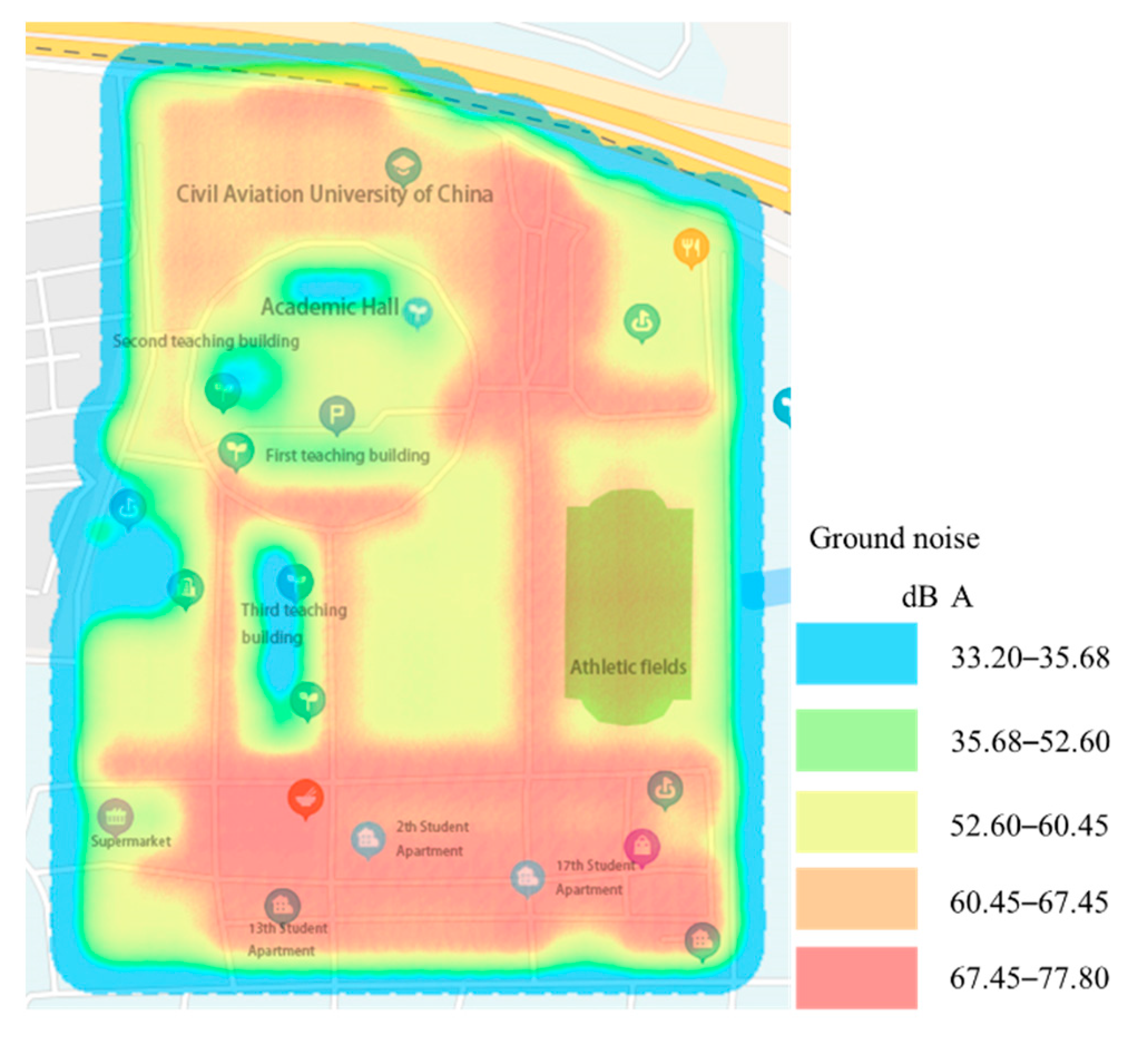
5.3.3. Noise Data
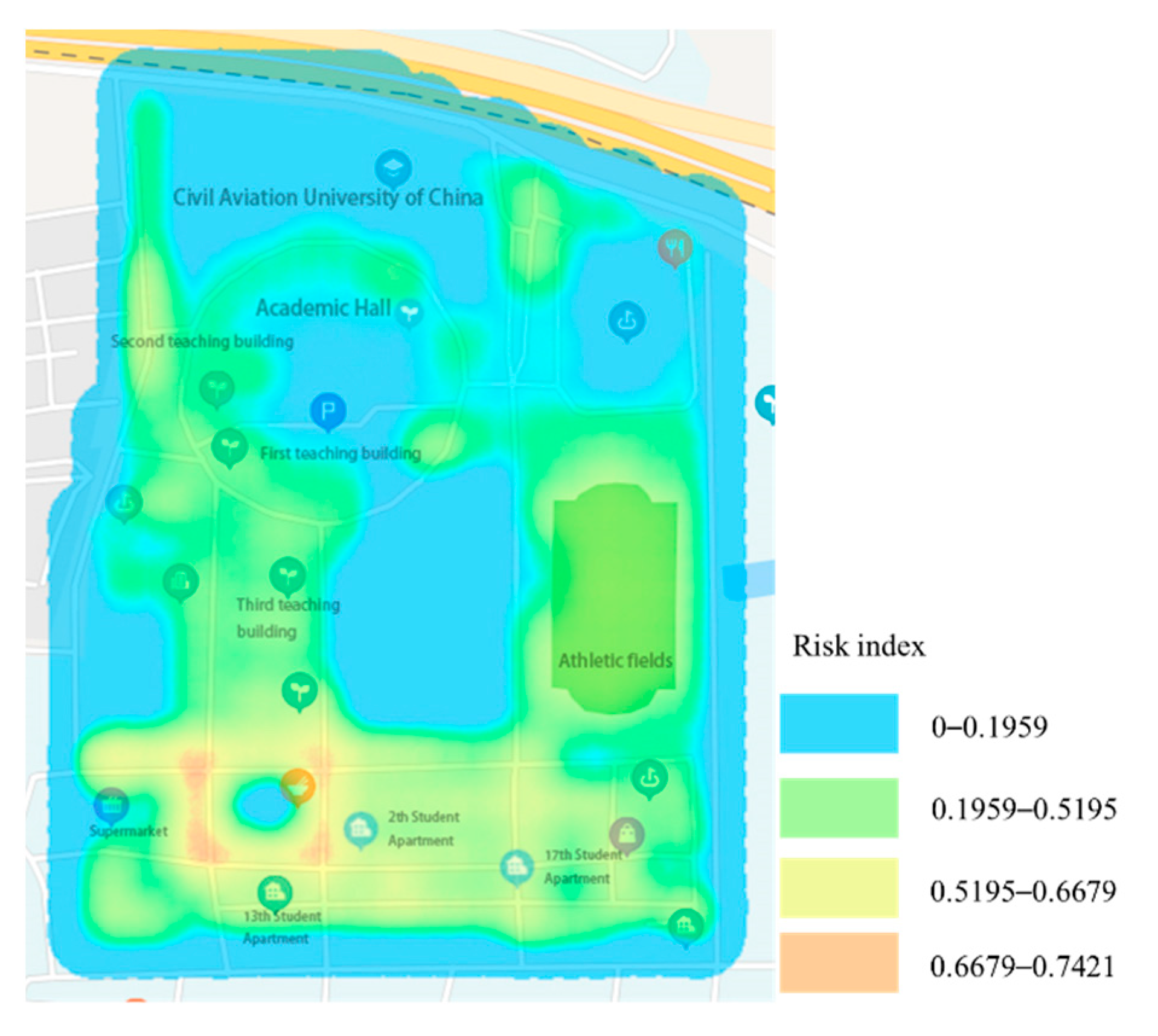
5.4. Analysis of Risk Index of UAV Southern Flight Area
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Changmiao, D. Ideas on the development of drone logistics industry under the background of the epidemic. J. Air Bus. 2020, 6, 27–30. [Google Scholar]
- Stolaroff, J.K.; Samaras, C.; O’Neill, E.R.; Lubers, A.; Mitchell, A.S.; Ceperley, D. Energy use and life cycle greenhouse gas emissions of drones for commercial package delivery. J. Nat. Commun. 2018, 9, 409. [Google Scholar] [CrossRef] [PubMed]
- Song, B.D.; Park, K.; Kim, J. Persistent UAV delivery logistics: MILP formulation and efficient heuristic. Comput. Ind. Eng. 2018, 120, 418–428. [Google Scholar] [CrossRef]
- Kim, S.H. Choice model based analysis of consumer preference for drone delivery service. J. Air Transp. Manag. 2020, 84, 101785. [Google Scholar] [CrossRef]
- Venkatesh, N.; Payan, A.P.; Justin, C.Y.; Kee, E.; Mavris, D. Optimal Siting of Sub-Urban Air Mobility (sUAM) Ground Architectures using Network Flow Formulation. In Proceedings of the Virtual Event AIAA Aviation 2020 Forum, Reno, NV, USA, 15–19 June 2020. [Google Scholar]
- Kitjacharoenchai, P.; Min, B.C.; Lee, S. Two echelon vehicle routing problem with drones in last mile delivery. Int. J. Prod. Econ. 2019, 225, 107598. [Google Scholar] [CrossRef]
- Parker, D.; Vascik, R.; John, H. Constraint Identification in On-Demand Mobility for Aviation through an Exploratory Case Study of Los Angeles; MIT International Center for Air Transportation (ICAT): Boston, MA, USA, 2017. [Google Scholar]
- Al Haddad, C.; Chaniotakis, E.; Straubinger, A.; Plötner, K.; Antoniou, C. Factors affecting the adoption and use of urban air mobility. J. Transp. Res. Part A 2020, 132, 696–712. [Google Scholar] [CrossRef]
- Parker, D.; Vascik, R.; John, H. Scaling Constraints for Urban Air Mobility Operations: Air Traffic Control, Ground Infrastructure, and Noise; MIT International Center for Air Transportation (ICAT): Boston, MA, USA, 2018. [Google Scholar]
- Burchan, A. Public acceptance of drones: Knowledge, attitudes, and practice. J. Technol. Soc. 2019, 59, 120–125. [Google Scholar]
- Courtin, C.; Burton, M.J.; Yu, A.; Butler, P.; Vascik, P.D.; Hansman, R.J. Feasibility Study of Short Takeoff and Landing Urban Air Mobility Vehicles Using Geometric Programming; MIT International Center for Air Transportation (ICAT): Boston, MA, USA, 2018. [Google Scholar]
- Mohamed Salleh, M.F.; Wanchao, C.; Wang, Z.; Huang, S.; Tan, D.Y.; Huang, T.; Low, K.H. Preliminary Concept of Adaptive Urban Airspace Management for Unmanned Aircraft Operations. In Proceedings of the 2018 AIAA Information Systems-AIAA Infotech @ Aerospace, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar] [CrossRef]
- Hong, I.; Kuby, M.; Murray, A.T. A range-restricted recharging station coverage model for drone delivery service planning. Transp. Res. 2018, 90, 198–212. [Google Scholar] [CrossRef]
- Yoo, W.; Yu, E.; Jung, J. Drone delivery: Factors affecting the public’s attitude and intention to adopt. Telemat. Inform. 2018, 35, 1687–1700. [Google Scholar] [CrossRef]
- Richards, D.; Edgell, S. Attitudes toward UAV integration into the National Airspace System. In Proceedings of the AIAA Aviation Technology, Integration, & Operations Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- Peng, H.; Yifei, Z. Study on ground impact risk of UAV based on flight environment. China Saf. Sci. J. 2020, 30, 142–147. [Google Scholar]
- Xu, C.; Liao, X.; Ye, H.; Yue, H. Theoretical system and technical path of iterative construction of UAV low-altitude route network in urbanization area. J. Acta Geogr. Sin. 2020, 75, 917–930. [Google Scholar]
- Watkins, S.; Burry, J.; Mohamed, A. Ten questions concerning the use of drones in urban environments. Build. Environ. 2020, 167, 106458. [Google Scholar] [CrossRef]
- Mingyuan, L. Civilian UAV Social Risk Prevention and Control and Legal Supervision. Adm. Reform 2019, 8, 44–49. [Google Scholar]
- Park, S.H.; Lee, K.H. Developing Criteria for Invasion of Privacy by Personal Drone.C. In Proceedings of the International Conference on Platform Technology & Service, Busan, Korea, 13–15 February 2017. [Google Scholar]
- Koh, C.H.; Low, K.H.; Li, L.; Zhao, Y.; Deng, C.; Tan, S.K.; Chen, Y.; Yeap, B.C.; Li, X. Weight threshold estimation of falling UAVs (Unmanned Aerial Vehicles) based on impact energy. Transp. Res. Part C 2018, 93, 228–255. [Google Scholar] [CrossRef]
- Zhang, H.; Gan, X.; Xin, J.; Xu, C.; Ke, X. Overview of Risk Assessment and Uncertainty of UAV Operation. Sci. Technol. Innov. 2020, 24, 18–19. (in Chinese). [Google Scholar]
- Qiang, H.; Yi, X.; Xiaoqiang, Y. Civil UAV Flight Risk Assessment and Control System. Math. Pract. Knowl. 2019, 49, 148–156. [Google Scholar]
- Pang, B.; Tan, Q.; Ra, T.; Low, K.H. A Risk-based UAS Traffic Network Model for Adaptive Urban Airspace Management. In Proceedings of the Virtual Event AIAA Aviation 2020 Forum, Reno, NV, USA, 15–19 June 2020. [Google Scholar]
- Wen, N.; Zhao, L.; Su, X.; Ma, P. UAV Online Path Planning Algorithm in a Low Altitude Dangerous Environment. IEEE/CAA J. Autom. Sin. 2015, 2, 173–185. [Google Scholar]
- Jiang, C.; Blom, H.A.; Sharpanskykh, A. Blom, Alexei Sharpanskykh, Third Party Risk Indicators and Their Use in Safety Regulations for UAS Operations. In Proceedings of the Virtual Event AIAA Aviation 2020 Forum, Reno, NV, USA, 15–19 June 2020. [Google Scholar]
- Antwork. How Is the Development of the Hangzhou Urban Logistics Drone Project. 2019. Available online: http://www.caacnews.com.cn/1/6/201912/t20191225_1288351.html (accessed on 3 October 2020).
- Tang, X.B.; Meng, J.; Wang, P.; Cao, Y.; Huang, X.; Wen, L.S.; Chen, D. Efficiency calibration and minimum detectable activity concentration of a real-time UAV airborne sensor system with two gamma spectrometers. Appl. Radiat. Isot. 2016, 110, 100–108. [Google Scholar] [CrossRef] [PubMed]
- Marino, L. Experimental Analysis of UAV Propeller Noise. In Proceedings of the 16th AIAA/CEAS Aeroacoustics Conference, Stockholm, Sweden, 7–9 June 2010. [Google Scholar]
- Lai, J.; Mejias, L.; Ford, J. Airborne vision-based collision-detection system. Field Robot 2011, 28, 137–157. [Google Scholar] [CrossRef] [Green Version]
- British Security Industry Association. Planning, Design, Installation and Operation of CCTV Surveillance Systems Code of Practice and Associated Guidance. July 2014. Available online: http://www.bsia.co.uk/Portals/4/Publications/109-installation-cctv-systems.pdf (accessed on 31 October 2018).
- Zhang, X.; Liu, Y.; Zhang, Y.; Guan, X.; Delahaye, D.; Tang, L. Safety Assessment and Risk Estimation for Unmanned Aerial Vehicles Operating in National Airspace System. J. Adv. Transp. 2018, 2018, 1–11. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Levels | Horizontal Pixels |
|---|---|
| Monitor | 2 |
| Detect | 4 |
| Observe | 10 |
| Recognize | 20 |
| Identify | 40 |
| Name | Weight/kg | Load Weight/kg | Size/cm3 | Speed m/s |
|---|---|---|---|---|
| RA3 | 20 | 5 | 104 × 122 × 50 | 12 |
| Ground Cover Classification | The Building | Tall Trees | Sparse Trees | Open Spaces |
|---|---|---|---|---|
| Barrier factor | 10 | 7 | 4 | 0 |
| Area | Grid Number | 30-m Risk Index | 40-m Risk Index | 50-m Risk Index | 60-m Risk Index |
|---|---|---|---|---|---|
| Forest | 024 | 0.0581 | 0.0591 | 0.0616 | 0.0642 |
| 051 | 0.3486 | 0.3548 | 0.3694 | 0.3852 | |
| Canteen passage | 283 | 0.7000 | 0.7270 | 0.7745 | 0.8248 |
| 278 | 0.6300 | 0.6543 | 0.6970 | 0.7423 | |
| Road | 188 | 0.2100 | 0.2181 | 0.2323 | 0.2474 |
| 2716 | 0.4200 | 0.4362 | 0.4647 | 0.4949 | |
| 1215 | 0.1400 | 0.1454 | 0.1549 | 0.1650 | |
| 2912 | 0.5339 | 0.5501 | 0.5785 | 0.6088 | |
| Inside the building | 2812 | 0.0560 | 0.0458 | 0.0384 | 0.0315 |
| 196 | 0.2154 | 0.2037 | 0.1953 | 0.1873 | |
| 1510 | 0.1077 | 0.1018 | 0.0976 | 0.0937 |
| Risk Level | High Risk | Medium Risk | Low Risk | Micro Risk |
|---|---|---|---|---|
| Index range | AR ≥ 0.7270 | 0.5089 ≤ AR < 0.7270 | 0.2037 ≤ AR < 0.5089 | AR < 0.2037 |
| Grid number | 283, 298, etc. | 272, 258, 081, etc. | 195, 2018, 1710, etc. | 118, 2012, etc. |
| Corresponding area | Passage of the first and third canteens | The intersection in front of the canteen, the road in front of the south four, the road under the bridge, the road in front of the dormitory | Teaching building, athletic fields, Baiyun north intersection | Plaza in front of the library, Millennium Lake and surrounding areas, woods |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, X.; Cheng, C. Model of Third-Party Risk Index for Unmanned Aerial Vehicle Delivery in Urban Environment. Sustainability 2020, 12, 8318. https://doi.org/10.3390/su12208318
Ren X, Cheng C. Model of Third-Party Risk Index for Unmanned Aerial Vehicle Delivery in Urban Environment. Sustainability. 2020; 12(20):8318. https://doi.org/10.3390/su12208318
Chicago/Turabian StyleRen, Xinhui, and Caixia Cheng. 2020. "Model of Third-Party Risk Index for Unmanned Aerial Vehicle Delivery in Urban Environment" Sustainability 12, no. 20: 8318. https://doi.org/10.3390/su12208318
APA StyleRen, X., & Cheng, C. (2020). Model of Third-Party Risk Index for Unmanned Aerial Vehicle Delivery in Urban Environment. Sustainability, 12(20), 8318. https://doi.org/10.3390/su12208318