The Determinants behind the Acceptance of Autonomous Vehicles: A Systematic Review

Abstract
:1. Introduction
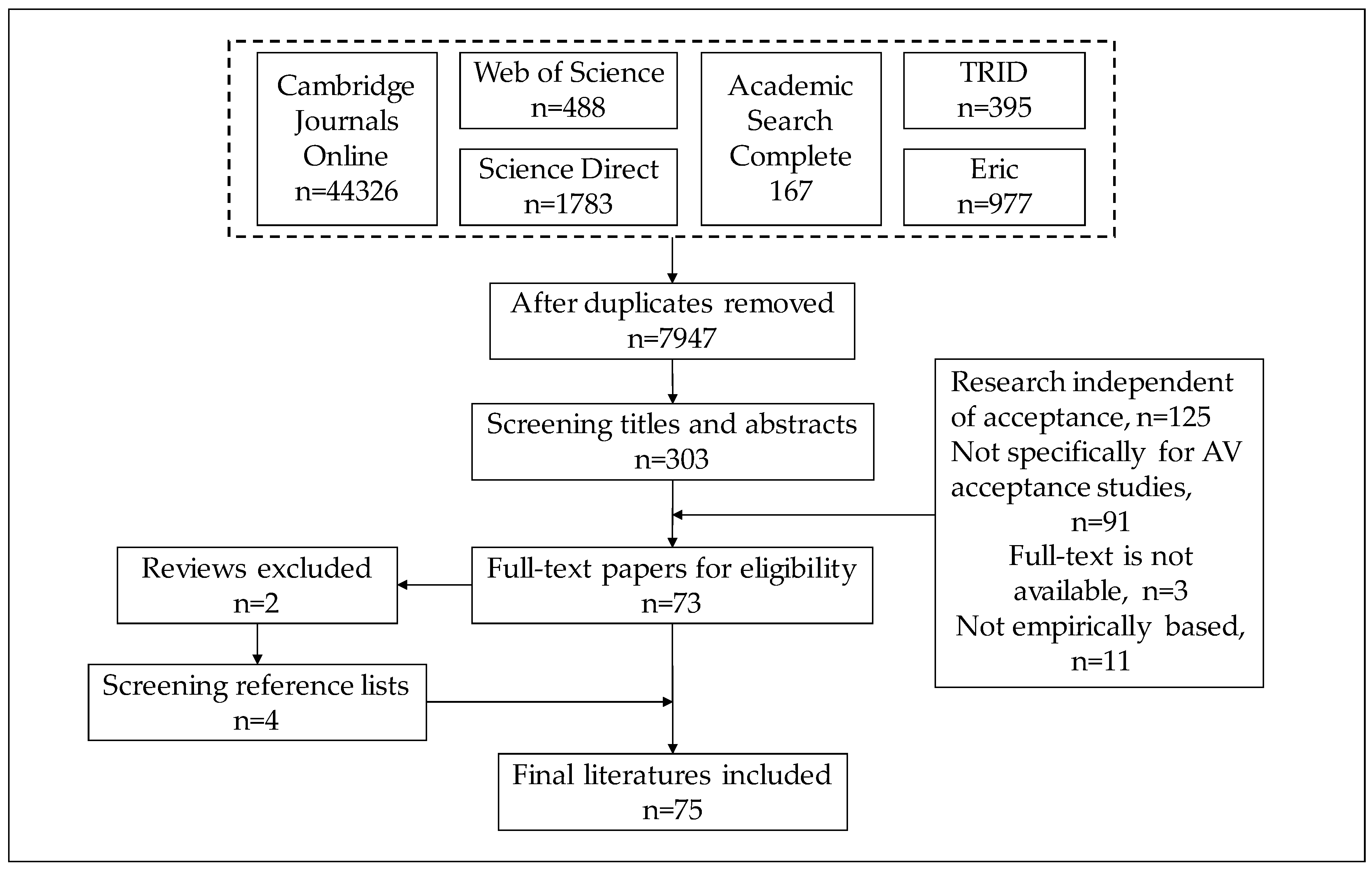
2. Methodology
2.1. Subsection
2.2. Inclusion and Exclusion Criteria
2.3. Data Extraction
2.4. Quality assessment
3. Results
3.1. Features of Reviewed Studies
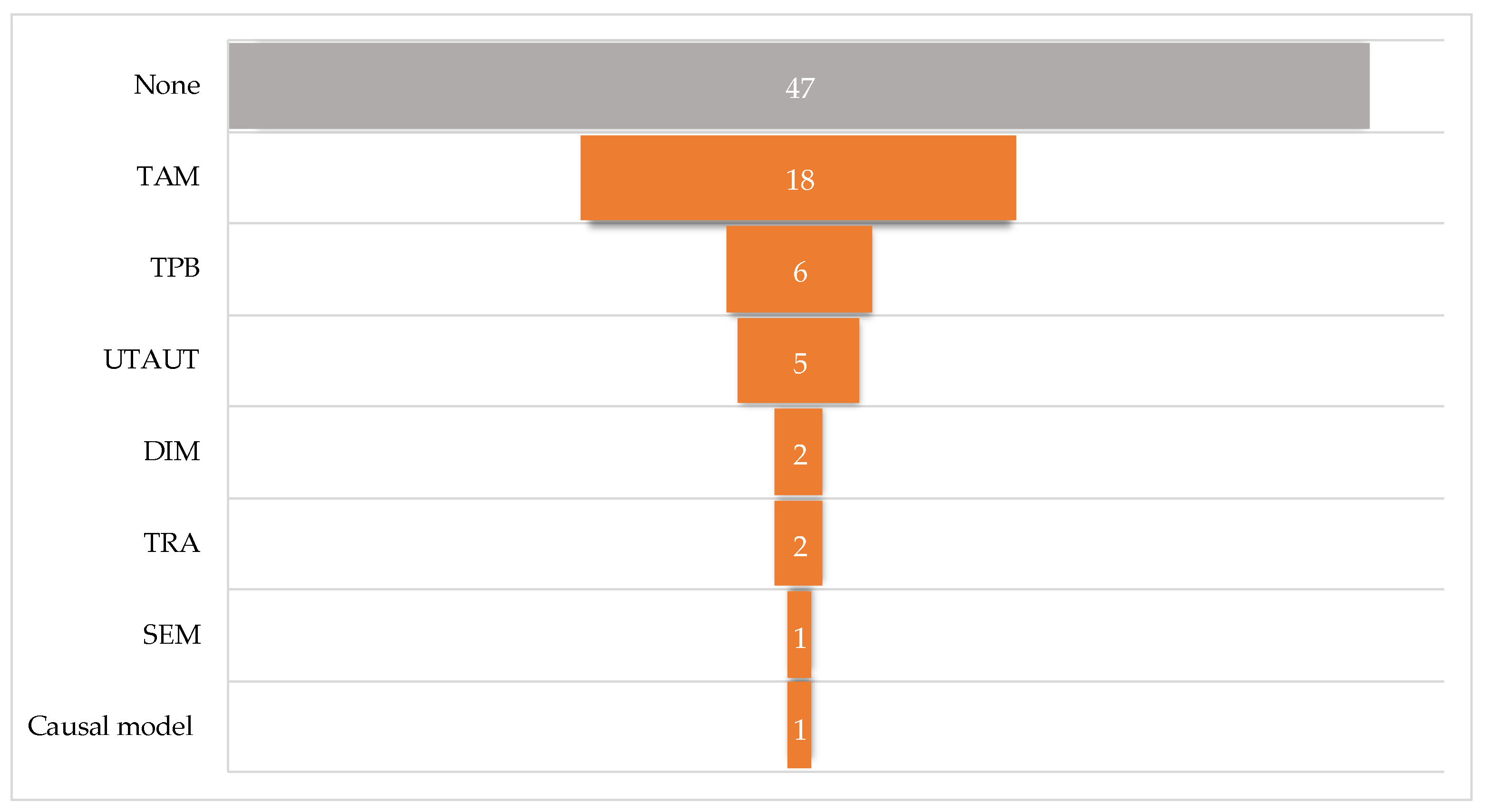
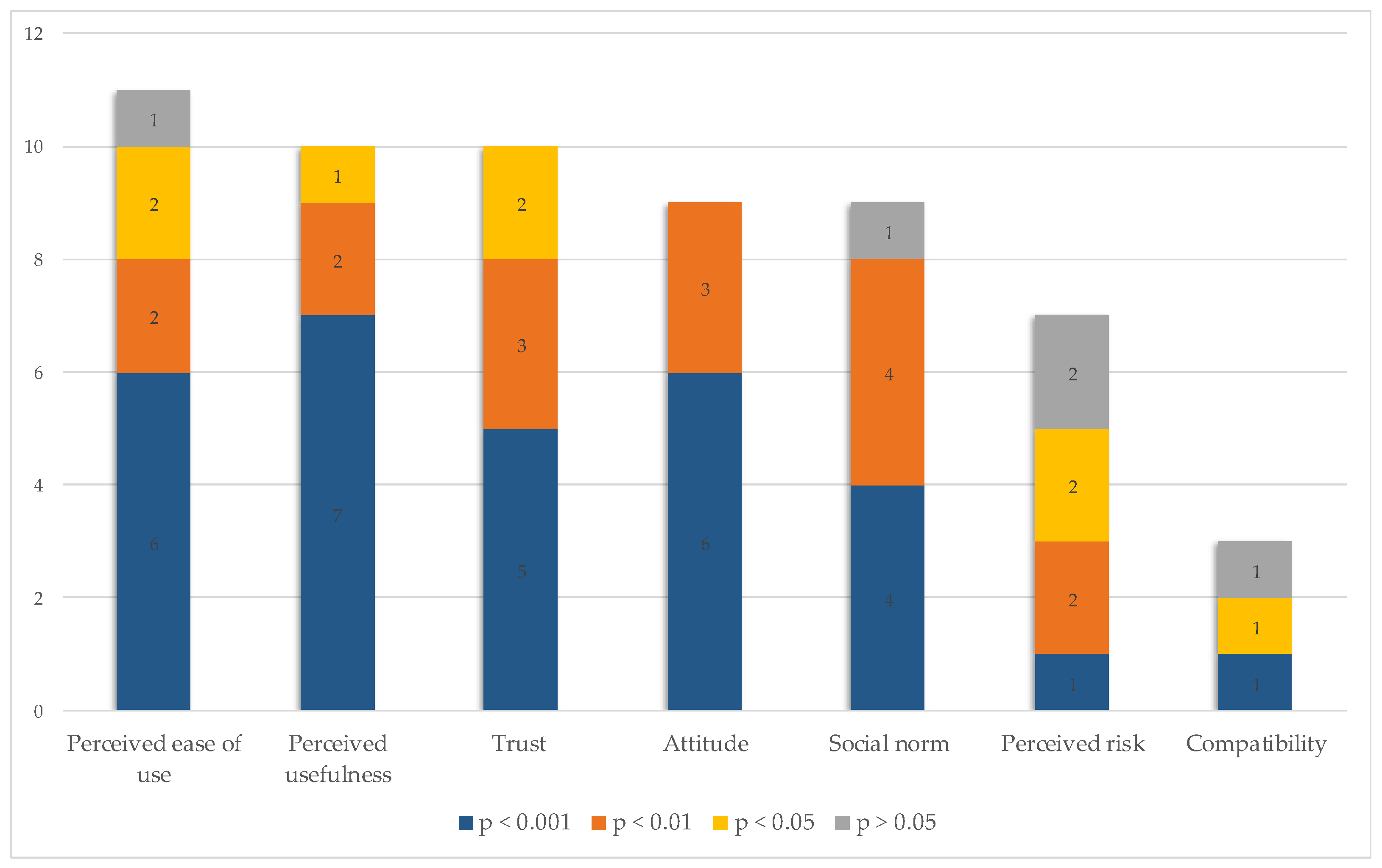
3.2. Factors Accounting for AV Acceptance in Studies with Behavior Theories
3.2.1. Perceived Ease of Use
3.2.2. Attitude
3.2.3. Social Norm
3.2.4. Trust
3.2.5. Perceived Usefulness
3.2.6. Perceived Risk
3.2.7. Compatibility
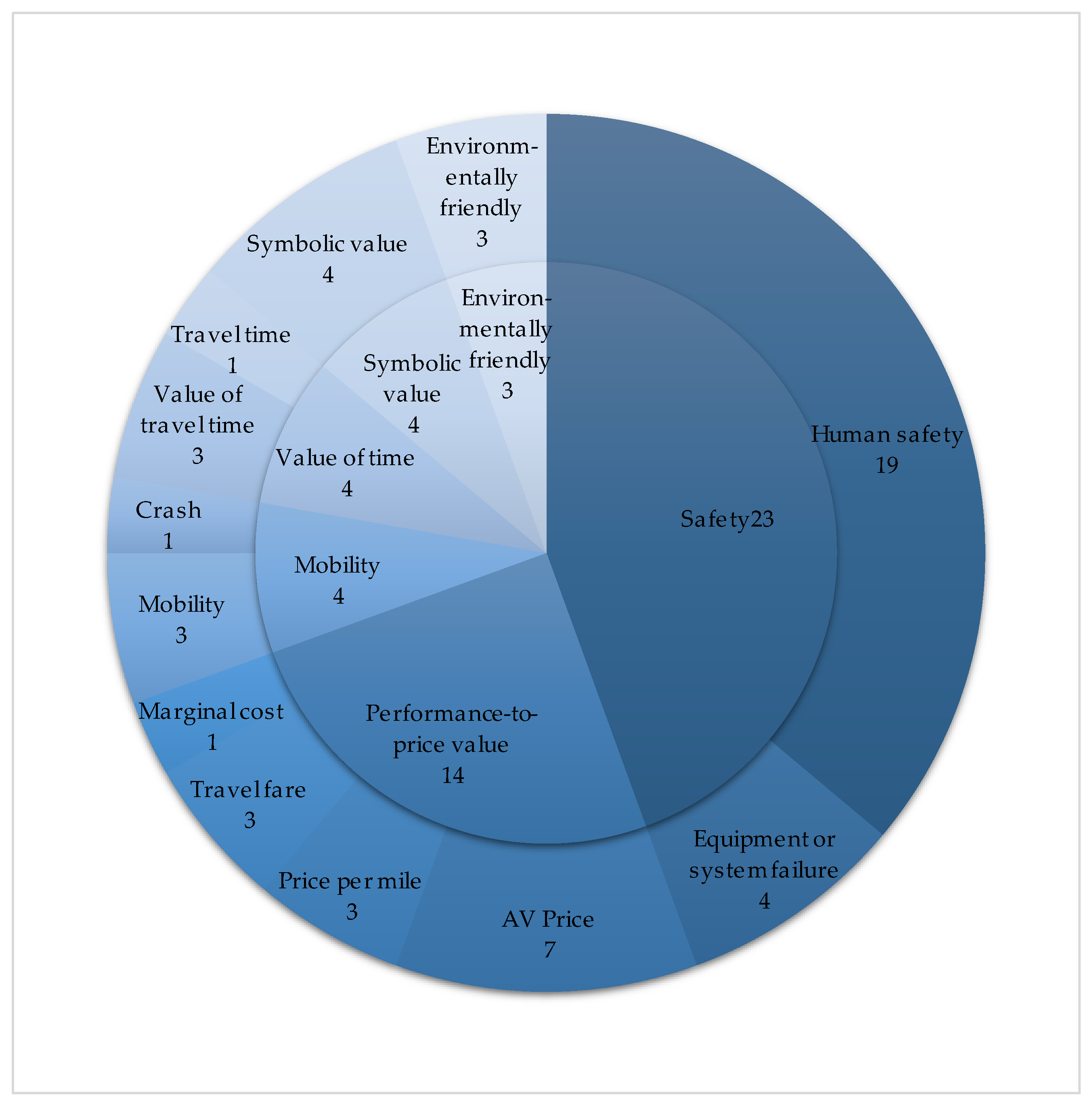
3.3. Factors Accounting for AV Acceptance in Studies without Behavior Theories
3.3.1. Safety
3.3.2. Performance-To-Price Value
3.3.3. Mobility
3.3.4. Value of Travel Time
3.3.5. Symbolic Value
3.3.6. Environmentally Friendly
3.4. The Acceptance of Autonomous Related Products
3.5. Dynamic Preference
3.6. Quality of Reviewed Studies
4. Discussion
4.1. Empirical Issues
4.2. Methodological Issues
4.3. Theoretical Issues
4.4. Factor Issues
4.5. Limitations and Strengths
5. Conclusions and Possible Future Works
Author Contributions
Funding
Conflicts of Interest
References
- Bahamonde-Birke, F.J.; Kickhöfer, B.; Heinrichs, D.; Kuhnimhof, T. A systemic view on autonomous vehicles: Policy aspects for a sustainable transportation planning. Plan. Rev. 2018, 54, 12–25. [Google Scholar] [CrossRef]
- Greenblatt, J.B.; Shaheen, S. Automated vehicles, on-demand mobility, and environmental impacts. Curr. Sustain. Renew. Energy Rep. 2015, 2, 74–81. [Google Scholar] [CrossRef] [Green Version]
- Papa, E.; Ferreira, A. Sustainable accessibility and the implementation of automated vehicles: Identifying critical decisions. Urban Sci. 2018, 2, 5. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Lee, H.; Ali, G.; Pesch, D.; Xiao, P. A Survey on Resource Allocation in Vehicular Networks. arXiv 2019, arXiv:1909.13587. [Google Scholar]
- Spieser, K.; Treleaven, K.; Zhang, R.; Frazzoli, E.; Morton, D.; Pavone, M. Toward a Systematic Approach to the Design and Evaluation of Automated Mobility-on-Demand Systems: A Case Study in Singapore. In Road Vehicle Automation; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Krueger, R.; Rashidi, T.H.; Rose, J.M. Preferences for shared autonomous vehicles. Transp. Res. Part C 2016, 69, 343–355. [Google Scholar] [CrossRef]
- Portouli, E.; Karaseitanidis, G.; Lytrivis, P.; Amditis, A.; Raptis, O.; Karaberi, C. Public attitudes towards autonomous mini buses operating in real conditions in a Hellenic city. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 571–576. [Google Scholar]
- Meneguette, R.I.; De Grande, R.; Loureiro, A.A. Intelligent Transport System in Smart Cities; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Zmud, J.P.; Sener, I.N. Towards an understanding of the travel behavior impact of autonomous vehicles. Transp. Res. Procedia 2017, 25, 2500–2519. [Google Scholar] [CrossRef]
- Haboucha, C.J.; Ishaq, R.; Shiftan, Y. User preferences regarding autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2017, 78, 37–49. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M.; Singh, A. Assessing public opinions of and interest in new vehicle technologies: An Austin perspective. Transp. Res. Part C 2016, 67, 1–14. [Google Scholar] [CrossRef]
- Antov, D.; Banet, A.; Barbier, C.; Bellet, T.; Bimpeh, Y.; Boulanger, A.; Brandstätter, C.; Britschgi, V.; Brosnan, M.; Buttler, I.; et al. European Road Users’ Risk Perception and Mobility: The SARTRE 4 Survey; IFSTTAR: Paris, France, 2012. [Google Scholar]
- Harb, M.; Xiao, Y.; Circella, G.; Mokhtarian, P.L.; Walker, J.L. Projecting travelers into a world of self-driving vehicles: Estimating travel behavior implications via a naturalistic experiment. Transportation 2018, 45, 1671–1685. [Google Scholar] [CrossRef]
- Rogers, E.M. New product adoption and diffusion. J. Consum. Res. 1976, 2, 290–301. [Google Scholar] [CrossRef]
- Sheth, J.N.; Stellner, W.H. Psychology of Innovation Resistance: The Less Developed Concept (LDC) in Diffusion Research; College of Commerce and Business Administration, University of Illinois at Urbana-Champaign: Urbana-Champaign, IL, USA, 1979. [Google Scholar]
- Anania, E.C.; Rice, S.; Walters, N.W.; Pierce, M.; Winter, S.R.; Milner, M.N. The effects of positive and negative information on consumers’ willingness to ride in a driverless vehicle. Transp. Policy 2018, 72, 218–224. [Google Scholar] [CrossRef]
- Ram, S.; Sheth, J.N. Consumer resistance to innovations: The marketing problem and its solutions. J. Consum. Mark. 1989, 6, 5–14. [Google Scholar] [CrossRef]
- Story, V.; O’Malley, L.; Hart, S. Roles, role performance, and radical innovation competences. Ind. Mark. Manag. 2011, 40, 952–966. [Google Scholar] [CrossRef]
- Becker, F.; Axhausen, K.W. Literature review on surveys investigating the acceptance of automated vehicles. Transportation 2017, 44, 1293–1306. [Google Scholar] [CrossRef] [Green Version]
- Gkartzonikas, C.; Gkritza, K. What have we learned? A review of stated preference and choice studies on autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2019, 98, 323–337. [Google Scholar] [CrossRef]
- Sadowski, P.; Krishna, V. Dynamic Preference for Flexibility. Econometrica 2014, 82, 655–703. [Google Scholar] [CrossRef] [Green Version]
- Moher, D.; Liberati, A.; Tetzlaff, J.; Altman, D.G. Preferred reporting items for systematic reviews and meta-analyses: The PRISMA statement. Ann. Intern. Med. 2009, 151, 264–269. [Google Scholar] [CrossRef] [Green Version]
- Payre, W.; Cestac, J.; Delhomme, P. Intention to use a fully automated car: Attitudes and a priori acceptability. Transp. Res. Part F Psychol. Behav. 2014, 27, 252–263. [Google Scholar] [CrossRef] [Green Version]
- Garrard, J. Health Sciences Literature Review Made Easy: The Matrix Methods, 2nd ed.; Jones and Barlett Publishers: Sudbury, MA, USA, 2006. [Google Scholar]
- Lu, W.; Mckyer, E.L.J.; Lee, C.; Goodson, P.; Ory, M.G.; Wang, S. Perceived barriers to children’s active commuting to school: A systematic review of empirical, methodological and theoretical evidence. Int. J. Behav. Nutr. Phys. Act. 2014, 11, 140. [Google Scholar] [CrossRef] [Green Version]
- Ferrari, E.; Chevallier, T.; Chapelier, A.; Baudouy, M. Travel as a risk factor for venous thromboembolic disease: A case-control study. Chest 1999, 115, 440–444. [Google Scholar] [CrossRef] [PubMed]
- Acheampong, R.A.; Cugurullo, F. Capturing the behavioural determinants behind the adoption of autonomous vehicles: Conceptual frameworks and measurement models to predict public transport, sharing and ownership trends of self-driving cars. Transp. Res. Part F Traffic Psychol. Behav. 2019, 62, 349–375. [Google Scholar] [CrossRef] [Green Version]
- Madigan, R.; Louw, T.; Wilbrink, M.; Schieben, A.; Merat, N. What influences the decision to use automated public transport? Using UTAUT to understand public acceptance of automated road transport systems. Transp. Res. Part F Traffic Psychol. Behav. 2017, 50, 55–64. [Google Scholar] [CrossRef]
- Gold, C.; Körber, M.; Hohenberger, C.; Lechner, D.; Bengler, K. Trust in Automation—Before and After the Experience of Take-over Scenarios in a Highly Automated Vehicle. Procedia Manuf. 2015, 3, 3025–3032. [Google Scholar] [CrossRef]
- Schoettle, B.; Sivak, M. A Survey of Public Opinion about Autonomous and Self-Driving Vehicles in the US, the UK, and Australia. In Proceedings of the 2014 International Conference on Connected Vehicles and Expo (ICCVE), Vienna, Austria, 3–7 November 2014; pp. 687–692. [Google Scholar]
- Schoettle, B.; Sivak, M. Public Opinion about Self-Driving Vehicles in China, India, Japan, the US, the UK, and Australia; University of Michigan, Ann Arbor, Transportation Research Institute: Ann Arbor, MI, USA, 2014. [Google Scholar]
- Choi, J.K.; Ji, Y.G. Investigating the Importance of Trust on Adopting an Autonomous Vehicle. Int. J. Hum. Comput. Interact. 2015, 31, 692–702. [Google Scholar] [CrossRef]
- Kyriakidis, M.; Happee, R.; Winter, J.C.F.D. Public opinion on automated driving: Results of an international questionnaire among 5000 respondents. Transp. Res. Part F Traffic Psychol. Behav. 2015, 32, 127–140. [Google Scholar] [CrossRef]
- Piao, J.; Mcdonald, M.; Hounsell, N.; Graindorge, M.; Graindorge, T.; Malhene, N. Public Views towards Implementation of Automated Vehicles in Urban Areas. Transp. Res. Procedia 2016, 14, 2168–2177. [Google Scholar] [CrossRef] [Green Version]
- Solbraa Bay, A.J.T. Innovation Adoption in Robotics: Consumer Intentions to Use Autonomous Vehicles. Master’s Thesis, Norwegian School of Economics, Bergen, Norway, 2016. [Google Scholar]
- Zmud, J.; Sener, I.N.; Wagner, J. Consumer Acceptance and Travel Behavior: Impacts of Automated Vehicles; Texas A&M Transportation Institute: Bryan, TX, USA, 2016. [Google Scholar]
- Hohenberger, C.; Spörrle, M.; Welpe, I.M. How and why do men and women differ in their willingness to use automated cars? The influence of emotions across different age groups. Transp. Res. Part A 2016, 94, 374–385. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M. Forecasting Americans’ long-term adoption of connected and autonomous vehicle technologies. Transp. Res. Part A 2017, 95, 49–63. [Google Scholar] [CrossRef]
- Lavieri, P.S.; Garikapati, V.M.; Bhat, C.R.; Pendyala, R.M.; Astroza, S.; Dias, F.F. Modeling individual preferences for ownership and sharing of autonomous vehicle technologies. Transp. Res. Rec. 2017, 2665, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Robertson, R.D.; Meister, S.R.; Vanlaar, W.G.; Hing, M.M. Automated vehicles and behavioural adaptation in Canada. Transp. Res. Part A Policy Pract. 2017, 104, 50–57. [Google Scholar] [CrossRef]
- Shin, K.J.; Managi, S. Consumer Demand for Fully Automated Driving Technology: Evidence from Japan; Research Institute of Economy, Trade and Industry: Tokyo, Japan, 2017. [Google Scholar]
- Moták, L.; Neuville, E.; Chambres, P.; Marmoiton, F.; Monéger, F.; Coutarel, F.; Izaute, M. Antecedent variables of intentions to use an autonomous shuttle: Moving beyond TAM and TPB? Eur. Rev. Appl. Psychol. 2017, 67, 269–278. [Google Scholar] [CrossRef]
- Daziano, R.A.; Sarrias, M.; Leard, B. Are consumers willing to pay to let cars drive for them? Analyzing response to autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2017, 78, 150–164. [Google Scholar] [CrossRef] [Green Version]
- Deb, S.; Strawderman, L.; Carruth, D.W.; Dubien, J.; Smith, B.; Garrison, T. Development and Validation of a Questionnaire to Assess Pedestrian Receptivity toward Fully Autonomous Vehicles. Transp. Res. Part C Emerg. Technol. 2017, 84, 178–195. [Google Scholar] [CrossRef]
- Talebian, A.; Mishra, S. Predicting the adoption of connected autonomous vehicles: A new approach based on the theory of diffusion of innovations. Transp. Res. Part C Emerg. Technol. 2018, 95, 363–380. [Google Scholar] [CrossRef]
- Hartwich, F.; Witzlack, C.; Beggiato, M.; Krems, J.F. The first impression counts—A combined driving simulator and test track study on the development of trust and acceptance of highly automated driving. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 522–535. [Google Scholar] [CrossRef]
- Nordhoff, S.; de Winter, J.; Madigan, R.; Merat, N.; van Arem, B.; Happee, R. User acceptance of automated shuttles in Berlin-Schöneberg: A questionnaire study. Transp. Res. Part F Traffic Psychol. Behav. 2018, 58, 843–854. [Google Scholar] [CrossRef] [Green Version]
- Winter, S.R.; Keebler, J.R.; Rice, S.; Mehta, R.; Baugh, B.S. Patient perceptions on the use of driverless ambulances: An affective perspective. Transp. Res. Part F Traffic Psychol. Behav. 2018, 58, 431–441. [Google Scholar] [CrossRef]
- Winter, S.R.; Rice, S.; Mehta, R.; Walters, N.W.; Pierce, M.B.; Anania, E.C.; Milner, M.N.; Rao, N. Do Americans differ in their willingness to ride in a driverless bus? J. Unmanned Veh. Syst. 2018, 6, 267–278. [Google Scholar] [CrossRef]
- Leicht, T.; Chtourou, A.; Youssef, K.B. Consumer innovativeness and intentioned autonomous car adoption. J. High. Technol. Manag. Res. 2018, 29, 1–11. [Google Scholar] [CrossRef]
- Buckley, L.; Kaye, S.-A.; Pradhan, A.K. Psychosocial factors associated with intended use of automated vehicles: A simulated driving study. Accid. Anal. Prev. 2018, 115, 202–208. [Google Scholar] [CrossRef] [PubMed]
- Liljamo, T.; Liimatainen, H.; Pöllänen, M. Attitudes and concerns on automated vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2018, 59, 24–44. [Google Scholar] [CrossRef]
- Nielsen, T.A.S.; Haustein, S. On sceptics and enthusiasts: What are the expectations towards self-driving cars? Transp. Policy 2018, 66, 49–55. [Google Scholar] [CrossRef] [Green Version]
- Salonen, A.O. Passenger’s subjective traffic safety, in-vehicle security and emergency management in the driverless shuttle bus in Finland. Transp. Policy 2018, 61, 106–110. [Google Scholar] [CrossRef]
- Kaur, K.; Rampersad, G. Trust in driverless cars: Investigating key factors influencing the adoption of driverless cars. J. Eng. Technol. Manag. 2018, 48, 87–96. [Google Scholar] [CrossRef]
- Hulse, L.M.; Xie, H.; Galea, E.R. Perceptions of autonomous vehicles: Relationships with road Hulse gender and age. Saf. Sci. 2018, 102, 1–13. [Google Scholar] [CrossRef]
- Nazari, F.; Noruzoliaee, M.; Mohammadian, A.K. Shared versus private mobility: Modeling public interest in autonomous vehicles accounting for latent attitudes. Transp. Res. Part C Emerg. Technol. 2018, 97, 456–477. [Google Scholar] [CrossRef]
- Anania, E.; Rice, S.; Winter, S.; Milner, M.; Walters, N.; Pierce, M. Why People Are Not Willing to Let Their Children Ride in Driverless School Buses: A Gender and Nationality Comparison. Soc. Sci. 2018, 7, 34. [Google Scholar] [CrossRef] [Green Version]
- Shabanpour, R.; Golshani, N.; Shamshiripour, A.; Mohammadian, A.K. Eliciting preferences for adoption of fully automated vehicles using best-worst analysis. Transp. Res. Part C Emerg. Technol. 2018, 93, 463–478. [Google Scholar] [CrossRef]
- Panagiotopoulos, I.; Dimitrakopoulos, G. An empirical investigation on consumers’ intentions towards autonomous driving. Transp. Res. Part C Emerg. Technol. 2018, 95, 773–784. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, K.; Min, H.; Wang, Z.; Zhao, X.; Liu, P. What drives people to accept automated vehicles? Findings from a field experiment. Transp. Res. Part C Emerg. Technol. 2018, 95, 320–334. [Google Scholar] [CrossRef]
- Hudson, J.; Orviska, M.; Hunady, J. People’s attitudes to autonomous vehicles. Transp. Res. Part A Policy Pract. 2019, 121, 164–176. [Google Scholar] [CrossRef]
- Stoiber, T.; Schubert, I.; Hoerler, R.; Burger, P. Will consumers prefer shared and pooled-use autonomous vehicles? A stated choice experiment with Swiss households. Transp. Res. Part D Transp. Environ. 2019, 71, 265–282. [Google Scholar] [CrossRef]
- Wu, J.; Liao, H.; Wang, J.-W.; Chen, T. The role of environmental concern in the public acceptance of autonomous electric vehicles: A survey from China. Transp. Res. Part F Traffic Psychol. Behav. 2019, 60, 37–46. [Google Scholar] [CrossRef]
- Berliner, R.M.; Hardman, S.; Tal, G. Uncovering early adopter’s perceptions and purchase intentions of automated vehicles: Insights from early adopters of electric vehicles in California. Transp. Res. Part F Traffic Psychol. Behav. 2019, 60, 712–722. [Google Scholar] [CrossRef]
- Liu, P.; Yang, R.; Xu, Z. Public acceptance of fully automated driving: Effects of social trust and risk/benefit perceptions. Risk Anal. 2019, 39, 326–341. [Google Scholar] [CrossRef] [PubMed]
- Liu, P.; Zhang, Y.; He, Z. The effect of population age on the acceptable safety of self-driving vehicles. Reliab. Eng. Syst. Saf. 2019, 185, 341–347. [Google Scholar] [CrossRef]
- Liu, P.; Guo, Q.; Ren, F.; Wang, L.; Xu, Z. Willingness to pay for self-driving vehicles: Influences of demographic and psychological factors. Transp. Res. Part C Emerg. Technol. 2019, 100, 306–317. [Google Scholar] [CrossRef]
- Zhang, T.; Tao, D.; Qu, X.; Zhang, X.; Lin, R.; Zhang, W. The roles of initial trust and perceived risk in public’s acceptance of automated vehicles. Transp. Res. Part C Emerg. Technol. 2019, 98, 207–220. [Google Scholar] [CrossRef]
- Penmetsa, P.; Adanu, E.K.; Wood, D.; Wang, T.; Jones, S.L. Perceptions and expectations of autonomous vehicles–A snapshot of vulnerable road user opinion. Technol. Forecast. Soc. Chang. 2019, 143, 9–13. [Google Scholar] [CrossRef]
- Hardman, S.; Berliner, R.; Tal, G. Who will be the early adopters of automated vehicles? Insights from a survey of electric vehicle owners in the United States. Transp. Res. Part D Transp. Environ. 2019, 71, 248–264. [Google Scholar] [CrossRef]
- Lee, J.; Lee, D.; Park, Y.; Lee, S.; Ha, T. Autonomous vehicles can be shared, but a feeling of ownership is important: Examination of the influential factors for intention to use autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2019, 107, 411–422. [Google Scholar] [CrossRef]
- Manfreda, A.; Ljubi, K.; Groznik, A. Autonomous vehicles in the smart city era: An empirical study of adoption factors important for millennials. Int. J. Inf. Manag. 2019, 102050. [Google Scholar] [CrossRef]
- Investigating end-user, Y.; Kimura, K.; Taniguchi, A.; Morikawa, T. What Affects Social Acceptance and Use Intention for Autonomous Vehicles–Benefits, Risk Perception, or Experience?-Meta-Analysis in Japan. Int. J. Intell. Transp. Syst. Res. 2020, 18, 22–34. [Google Scholar]
- Herrenkind, B.; Brendel, A.B.; Nastjuk, I.; Greve, M.; Kolbe, L.M. Investigating end-user acceptance of autonomous electric buses to accelerate diffusion. Transp. Res. Part D Transp. Environ. 2019, 74, 255–276. [Google Scholar] [CrossRef]
- Herrenkind, B.; Nastjuk, I.; Brendel, A.B.; Trang, S.; Kolbe, L.M. Young people’s travel behavior–Using the life-oriented approach to understand the acceptance of autonomous driving. Transp. Res. Part D Transp. Environ. 2019, 74, 214–233. [Google Scholar] [CrossRef]
- Wang, S.; Zhao, J. Risk preference and adoption of autonomous vehicles. Transp. Res. Part A Policy Pract. 2019, 126, 215–229. [Google Scholar] [CrossRef]
- Bennett, R.; Vijaygopal, R.; Kottasz, R. Willingness of people who are blind to accept autonomous vehicles: An empirical investigation. Transp. Res. Part F Traffic Psychol. Behav. 2020, 69, 13–27. [Google Scholar] [CrossRef]
- Ro, Y.; Ha, Y. A factor analysis of consumer expectations for autonomous cars. J. Comput. Inf. Syst. 2019, 59, 52–60. [Google Scholar] [CrossRef]
- Hegner, S.M.; Beldad, A.D.; Brunswick, G.J. In automatic we trust: Investigating the impact of trust, control, personality characteristics, and extrinsic and intrinsic motivations on the acceptance of autonomous vehicles. Int. J. Hum. Comput. Interact. 2019, 35, 1769–1780. [Google Scholar] [CrossRef]
- Wintersberger, S.; Azmat, M.; Kummer, S. Are We Ready to Ride Autonomous Vehicles? A Pilot Study on Austrian Consumers’ Perspective. Logistics 2019, 3, 20. [Google Scholar] [CrossRef] [Green Version]
- López-Lambas, M.E.; Alonso, A. The Driverless Bus: An Analysis of Public Perceptions and Acceptability. Sustainability 2019, 11, 4986. [Google Scholar] [CrossRef] [Green Version]
- Zarkeshev, A.; Csiszár, C. Are People Ready to Entrust Their Safety to an Autonomous Ambulance as an Alternative and More Sustainable Transportation Mode? Sustainability 2019, 11, 5595. [Google Scholar] [CrossRef] [Green Version]
- Tan, L.; Ma, C.; Xu, X.; Xu, J. Choice Behavior of Autonomous Vehicles Based on Logistic Models. Sustainability 2020, 12, 54. [Google Scholar] [CrossRef] [Green Version]
- Salonen, A.O.; Haavisto, N. Towards Autonomous Transportation. Passengers’ Experiences, Perceptions and Feelings in a Driverless Shuttle Bus in Finland. Sustainability 2019, 11, 588. [Google Scholar] [CrossRef] [Green Version]
- Hinderer, H.; Stegmüller, J.; Schmidt, J.; Sommer, J.; Lucke, J. Acceptance of Autonomous Vehicles in Suburban Public Transport. In Proceedings of the 2019 IEEE International Conference on Engineering, Technology and Innovation (ICE/ITMC), Sophia Antipolis, France, 17–19 June 2019; pp. 1–8. [Google Scholar]
- Hutchins, N.F.; Kerr, A.J.; Hook, L.R. User Acceptance in Autonomous Vehicles: The Evolution of the End User. In Proceedings of the 2019 International Symposium on Systems Engineering (ISSE), Edinburgh, Scotland, 1–3 October 2019; pp. 1–8. [Google Scholar]
- Winter, K.; Wien, J.; Molin, E.; Cats, O.; Morsink, P.; van Arem, B. Taking The Self-Driving Bus: A Passenger Choice Experiment. In Proceedings of the 2019 6th International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Kraków, Poland, 5–7 June 2019; pp. 1–8. [Google Scholar]
- Dong, X.; DiScenna, M.; Guerra, E. Transit user perceptions of driverless buses. Transportation 2019, 46, 35–50. [Google Scholar] [CrossRef]
- Rahman, M.M.; Deb, S.; Strawderman, L.; Burch, R.; Smith, B. How the older population perceives self-driving vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 242–257. [Google Scholar] [CrossRef]
- Jing, P.; Huang, H.; Ran, B.; Zhan, F.; Shi, Y. Exploring the factors affecting mode choice Intention of autonomous vehicle based on an extended theory of planned behavior—A case study in China. Sustainability 2019, 11, 1155. [Google Scholar] [CrossRef] [Green Version]
- Kettles, N.; Van Belle, J.-P. Investigation into the Antecedents of Autonomous Car Acceptance using an Enhanced UTAUT Model. In Proceedings of the 2019 International Conference on Advances in Big Data, Computing and Data Communication Systems (icABCD), Winterton, South Africa, 5–6 August 2019; pp. 1–6. [Google Scholar]
- Zhang, T.; Tao, D.; Qu, X.; Zhang, X.; Zeng, J.; Zhu, H.; Zhu, H. Automated vehicle acceptance in China: Social influence and initial trust are key determinants. Transp. Res. Part C Emerg. Technol. 2020, 112, 220–233. [Google Scholar] [CrossRef]
- Davis, F.D. Perceived Usefulness, Perceived Ease of Use, and User Acceptance of Information Technology. MIS Q. 1989, 13, 319–340. [Google Scholar] [CrossRef] [Green Version]
- Ajzen, I. The theory of planned behavior. Organ. Behav. Hum. Decis. Process. 1991, 50, 179–211. [Google Scholar] [CrossRef]
- Rogers, E.M. Diffusion of Innovations; The Free Press: New York, NY, USA, 1983. [Google Scholar]
- Venkatesh, V.; Morris, M.G.; Davis, G.B.; Davis, F.D. User acceptance of information technology: Toward a unified view. MIS Q. 2003, 27, 425–478. [Google Scholar] [CrossRef] [Green Version]
- Fishbein, M.; Ajzen, I. Belief, Attitude, Intention, and Behavior: An Introduction to Theory and Research; Elsevier: Amsterdam, The Netherlands, 1977. [Google Scholar]
- McLeroy, K.R.; Bibeau, D.; Steckler, A.; Glanz, K. An ecological perspective on health promotion programs. Health Educ. Q. 1988, 15, 351–377. [Google Scholar] [CrossRef] [PubMed]
- Siegrist, M. A causal model explaining the perception and acceptance of gene technology 1. J. Appl. Soc. Psychol. 1999, 29, 2093–2106. [Google Scholar] [CrossRef]
- Arts, J.W.C.; Frambach, R.T.; Bijmolt, T.H.A. Generalizations on consumer innovation adoption: A meta-analysis on drivers of intention and behavior. Int. J. Res. Mark. 2011, 28, 134–144. [Google Scholar] [CrossRef]
- Venkatesh, V.; Davis, F.; Morris, M.G. Dead or alive? The development, trajectory and future of technology adoption research. J. Assoc. Inf. Syst. 2007, 8, 1. [Google Scholar] [CrossRef]
- Jansson, J. Consumer eco-innovation adoption: Assessing attitudinal factors and perceived product characteristics. Bus. Strategy Environ. 2011, 20, 192–210. [Google Scholar] [CrossRef]
- Petschnig, M.; Heidenreich, S.; Spieth, P. Innovative alternatives take action–Investigating determinants of alternative fuel vehicle adoption. Transp. Res. Part A Policy Pract. 2014, 61, 68–83. [Google Scholar] [CrossRef]
- Eagly, A.H.; Chaiken, S. The Psychology of Attitudes; Harcourt: New York, NY, USA, 1993. [Google Scholar]
- Hu, X.; Jian, W.; Lei, W. Understanding the Travel Behavior of Elderly People in the Developing Country: A Case Study of Changchun, China. Procedia Soc. Behav. Sci. 2013, 96, 873–880. [Google Scholar] [CrossRef] [Green Version]
- Kulviwat, S.; Bruner II, G.C.; Al-Shuridah, O. The role of social influence on adoption of high tech innovations: The moderating effect of public/private consumption. J. Bus. Res. 2009, 62, 706–712. [Google Scholar] [CrossRef]
- Ghazizadeh, M.; Peng, Y.; Lee, J.D.; Boyle, L.N. Augmenting the technology acceptance model with trust: Commercial drivers’ attitudes towards monitoring and feedback. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting; Association for Computing Machinery: New York, NY, USA, 2012; Volume 56, pp. 2286–2290. [Google Scholar]
- Lee, J.D.; See, K.A. Trust in automation: Designing for appropriate reliance. Hum. Factors 2004, 46, 50–80. [Google Scholar] [CrossRef] [PubMed]
- Ghazizadeh, M.; Lee, J.D.; Boyle, L.N. Extending the Technology Acceptance Model to assess automation. Cogn. Technol. Work 2012, 14, 39–49. [Google Scholar] [CrossRef]
- Payne, J.W.; Bettman, J.R.; Johnson, E.J. Behavioral decision research: A constructive processing perspective. Annu. Rev. Psychol. 1992, 43, 87–131. [Google Scholar] [CrossRef]
- Martín-Vega, F.J.; Soret, B.; Aguayo-Torres, M.C.; Kovács, I.Z.; Gómez, G. Geolocation-Based Access for Vehicular Communications: Analysis and Optimization via Stochastic Geometry. IEEE Trans. Veh. Technol. 2017, 67, 3069–3084. [Google Scholar] [CrossRef] [Green Version]
- Noor-A-Rahim, M.; Ali, G.M.N.; Guan, Y.L.; Ayalew, B.; Chong, P.H.J.; Pesch, D. Broadcast Performance Analysis and Improvements of the LTE-V2V Autonomous Mode at Road Intersection. IEEE Trans. Veh. Technol. 2019, 68, 9359–9369. [Google Scholar] [CrossRef]
- Vukadinovic, V.; Bakowski, K.; Marsch, P.; Garcia, I.D.; Xu, H.; Sybis, M.; Sroka, P.; Wesolowski, K.; Lister, D.; Thibault, I. 3GPP C-V2X and IEEE 802.11 p for Vehicle-to-Vehicle communications in highway platooning scenarios. Ad Hoc Netw. 2018, 74, 17–29. [Google Scholar] [CrossRef]
- Chekired, D.A.; Togou, M.A.; Khoukhi, L.; Ksentini, A. 5G-slicing-enabled scalable SDN core network: Toward an ultra-low latency of autonomous driving service. IEEE J. Sel. Areas Commun. 2019, 37, 1769–1782. [Google Scholar] [CrossRef]
- Naik, G.; Choudhury, B.; Park, J.-M. IEEE 802.11 bd & 5G NR V2X: Evolution of radio access technologies for V2X communications. IEEE Access 2019, 7, 70169–70184. [Google Scholar]
- Adams, J.A. Cognitive task analysis for unmanned aerial system design. Handb. Unmanned Aer. Veh. 2015, 2425–2441. [Google Scholar] [CrossRef]
- Vrkljan, B.H.; Anaby, D. What vehicle features are considered important when buying an automobile? An examination of driver preferences by age and gender. J. Saf. Res. 2011, 42, 61–65. [Google Scholar] [CrossRef]
- Mohammadian, A.; Miller, E. Empirical investigation of household vehicle type choice decisions. Transp. Res. Rec. 2003, 1854, 99–106. [Google Scholar] [CrossRef] [Green Version]
- Cairns, S.; Harmer, C.; Hopkin, J.; Skippon, S. Sociological perspectives on travel and mobilities: A review. Transp. Res. Part A Policy Pract. 2014, 63, 107–117. [Google Scholar] [CrossRef]
- Gucwa, M. Mobility and energy impacts of automated cars. In Proceedings of the Automated Vehicles Symposium, San Francisco, CA, USA, 15–17 July 2014. [Google Scholar]
- van den Berg, V.; Verhoef, E.T. Congestion tolling in the bottleneck model with heterogeneous values of time. Transp. Res. Part B Methodol. 2011, 45, 60–78. [Google Scholar] [CrossRef]
- Noruzoliaee, M.; Zou, B.; Liu, Y. Roads in transition: Integrated modeling of a manufacturer-traveler-infrastructure system in a mixed autonomous/human driving environment. Transp. Res. Part C Emerg. Technol. 2018, 90, 307–333. [Google Scholar] [CrossRef]
- Arbore, A.; Soscia, I.; Bagozzi, R.P. The Role of Signaling Identity in the Adoption of Personal Technologies. J. Assoc. Inf. Syst. 2014, 15, 86. [Google Scholar] [CrossRef]
- Gatersleben, B. Affective and symbolic aspects of car use. In Threats from Car Traffic to the Quality of Urban Life: Problems, Causes and Solutions; Emerald Group Publishing Limited: Bentley, UK, 2007; pp. 219–233. [Google Scholar]
- Li, J.; Xu, L.; Yao, D.; Mao, Y. Impacts of symbolic value and passenger satisfaction on bus use. Transp. Res. Part D Transp. Environ. 2019, 72, 98–113. [Google Scholar] [CrossRef]
- Steg, L. Car use: Lust and must. Instrumental, symbolic and affective motives for car use. Transp. Res. Part A 2005, 39, 147–162. [Google Scholar] [CrossRef]
- Zhu, C.; Zhu, Y.; Lu, R.; He, R.; Xia, Z. Perceptions and aspirations for car ownership among Chinese students attending two universities in the Yangtze Delta, China. J. Transport. Geogr. 2012, 24, 315–323. [Google Scholar] [CrossRef]
- Witt, U. Symbolic consumption and the social construction of product characteristics. Struct. Chang. Econ. Dyn. 2010, 21, 17–25. [Google Scholar] [CrossRef]
- Greenblatt, J.B.; Saxena, S. Autonomous taxis could greatly reduce greenhouse-gas emissions of US light-duty vehicles. Nat. Clim. Chang. 2015, 5, 860. [Google Scholar] [CrossRef]
- Webb, J.; Wilson, C.; Kularatne, T. Will people accept shared autonomous electric vehicles? A survey before and after receipt of the costs and benefits. Econ. Anal. Policy 2019, 61, 118–135. [Google Scholar] [CrossRef]
- Li, J.J.; Su, C. How face influences consumption. Int. J. Market. Res. 2007, 49, 237–256. [Google Scholar]
- Osswald, S.; Wurhofer, D.; Trösterer, S.; Beck, E.; Tscheligi, M. Predicting information technology usage in the car: Towards a car technology acceptance model. In Proceedings of the 4th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Portsmouth, NH, USA, 17–19 October 2012; pp. 51–58. [Google Scholar]
- Plewa, C.; Quester, P. Key drivers of university-industry relationships: The role of organisational compatibility and personal experience. J. Serv. Mark. 2007, 21, 370–382. [Google Scholar] [CrossRef]
- Sarkar, M.B.; Echambadi, R.; Cavusgil, S.T.; Aulakh, P.S. The influence of complementarity, compatibility, and relationship capital on alliance performance. J. Acad. Mark. Sci. 2001, 29, 358–373. [Google Scholar] [CrossRef]
- Abadi, H.R.D.; Kabiry, N.; Forghani, M.H. Factors affecting Isfahanian mobile banking adoption based on the technology acceptance model. Int. J. Acad. Res. Bus. Soc. Sci. 2013, 3, 611. [Google Scholar]
- Featherman, M.S.; Miyazaki, A.D.; Sprott, D.E. Reducing online privacy risk to facilitate e-service adoption: The influence of perceived ease of use and corporate credibility. J. Serv. Mark. 2010, 24, 219–229. [Google Scholar] [CrossRef] [Green Version]
- Hansen, J.M.; Saridakis, G.; Benson, V. Risk, trust, and the interaction of perceived ease of use and behavioral control in predicting consumers’ use of social media for transactions. Comput. Hum. Behav. 2018, 80, 197–206. [Google Scholar] [CrossRef]
- Litman, T. Autonomous Vehicle Implementation Predictions; Victoria Transport Policy Institute: Victoria, BC, Canada, 2017. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methodological Criterion | Description | Score |
|---|---|---|
| Assessing data collecting methodological quality | ||
| Research design | Case-control study Longitudinal study Cross-sectional study | 3 2 1 |
| Data acquisition path | AV ride experience and questionnaire AV Simulator and questionnaire Questionnaire only | 3 2 1 |
| Reasonable choice of sample size | Large (>300) Medium (100–300) Small (<100) | 3 2 1 |
| Assessing theory utilization | ||
| Theory utilization | Applicating behavior theories No evidence of using theory No evidence of using theory | 1 0 0 |
| Conceptualization of AV attributes or psychological factors | The AV attributes or psychological factors were defined clearly or contextually described Not defined/described | 1 0 |
| Assessing methods utilization | ||
| Application of statistical methods | Include Not include | 1 0 |
| Goodness of fit test | Tested Not tested | 1 0 |
| Parameter selection reliability testing | Tested Not tested | 1 0 |
| Lead Author (year) | Country | Time of Data Collection 1 | Number of Respondents | Analytical Method | Reference |
|---|---|---|---|---|---|
| Payre (2014) | France | 2013 | 421 | Factor analysis | [24] |
| Schoettle (2014a) | USA, UK, and Australia | 2014 | 1533 | Analysis of variance (ANOVA) | [31] |
| Schoettle (2014b) | China, India, and Japan | 2014 | 1722 | Descriptive statistic | [32] |
| Choi (2015) | Korea | 552 | Partial least-square | [33] | |
| Kyriakidis (2015) | Netherlands | 2014 | 4886 | Descriptive statistics | [34] |
| Gold (2015) | Germany | 72 | ANOVA | [30] | |
| Piao (2016) | France | 2015 | 425 | Descriptive statistics | [35] |
| Krueger (2016) | Australia | 2015 | 435 | Mixed logit model | [6] |
| AJT (2016) | Norway | 2016 | 383 | Structural equation modeling | [36] |
| J. Zmud (2016) | USA | 556; 44 | Regression model | [37] | |
| Hohenberger (2016) | Germany | 2014 | 1603 | Logistic regression model | [38] |
| Bansal (2016) | USA | 2015 | 2167 | Simulation-based fleet framework | [12] |
| Bansal (2017) | USA | 347 | Ordered probit model | [39] | |
| Lavieri et al (2017) | USA | 2014~2015 | 1832 | Generalized Heterogeneous Data Model | [40] |
| Robertson (2017) | Canada | 2016 | 2662 | CTAM Logistic regression | [41] |
| Shin (2017) | Japan | 2015 | 246642 | Regression analysis | [42] |
| Madigan (2017) | Greece | 2015 | 315 | Multiple regression analysis | [29] |
| Portouli (2017) | Greece | 2016 | 200; 519 | Descriptive statistics | [7] |
| J. P. Zmud (2017) | USA | 44; 556 | Regression analysis | [9] | |
| Moták (2017) | France | 2013 | 370; 162 | Regression analysis | [43] |
| Daziano (2017) | USA | 2014 | 1260 | Conditional logit model and Parameter logit model | [44] |
| Haboucha (2017) | Israel, North America | 2014 | 721 | Logit kernel model | [10] |
| Deb (2017) | USA | 482 | Regression analysis | [45] | |
| E. C. Anania (2018) | USA | 99 | Descriptive statistics | [17] | |
| Talebian (2018) | USA | 2017 | 327 | Agent-based simulation | [46] |
| Hartwich (2018) | Germany | 40 | ANOVA | [47] | |
| Nordhoff (2018) | Germany | 2016~2017 | 384 | Principal component analysis | [48] |
| Winter (2018a) | USA | 102/134/470 | ANOVA | [49] | |
| Winter (2018b) | USA | 510; 571 | Descriptive statistic | [50] | |
| Leicht (2018) | French | 241 | Multi-group regression analysis | [51] | |
| Buckley (2018) | USA | 74 | Regression analysis | [52] | |
| Liljamo (2018) | Finland | 2017 | 2036 | Cross tabulations | [53] |
| Nielsen (2018) | Denmark | 2016 | 3040 | ANOVA | [54] |
| Salonen (2018) | Finland | 2015 | 197 | Descriptive statistics | [55] |
| Kaur (2018) | Australia | 2017 | 101 | Factor analysis | [56] |
| Hulse (2018) | UK | 2016 | 925 | Factor analysis | [57] |
| Nazari (2018) | USA | 2017 | 2726; 1755 | Ordered probit model | [58] |
| E. Anania (2018) | USA and India | 50; 610 | Descriptive statistic | [59] | |
| Shabanpour (2018) | USA | 2016 | 1013 | Multinomial logit model | [60] |
| Panagiotopouloss (2018) | Greece | 2017 | 483 | Multiple regression analyses | [61] |
| Xu (2018) | China | 2017 | 300 | Structural equation modeling | [62] |
| Hudson (2019) | EU | 2014 | 27801 | Regression analysis | [63] |
| Acheampong (2019) | Ireland | 2018 | 507 | Factor analysis | [28] |
| Stoiber (2019) | Switzerland | 2018 | 709 | Ordinal logistic model | [64] |
| Wu (2019) | China | 2018 | 470 | Structural equation modeling | [65] |
| Berliner (2019) | USA | 2017 | 3280 | Descriptive statistics | [66] |
| Liu (2019) | China | 2017 | 441 | Structural equation modeling | [67] |
| Liu (2019a) | China | 2018 | 568 | Regression model and ANOVA | [68] |
| Liu (2019b) | China | 1355 | Regression analysis | [69] | |
| Zhang (2019) | China | 2018 | 216 | Structural equation modelling | [70] |
| Penmetsa (2019) | USA | 2017 | 798 | Descriptive statistic | [71] |
| Hardman (2019) | USA | 2018 | 2715 | Factor analysis; regression analysis | [72] |
| Lee (2019) | Korea | 313 | Structural equation modelling | [73] | |
| Manfreda (2019) | Slovenia | 2018 | 382 | Structural equation modelling | [74] |
| Nishihori (2019) | Japan | 2018 | 20300 | Meta-analysis | [75] |
| Herrenkind (2019) | Germany | 2018 | 268 | Structural equation modelling | [76] |
| Herrenkind (2019) | Germany | 2018 | 271 | Structural equation modelling | [77] |
| Wang (2019) | Singapore | 2017 | 1989 | mixed logit choice model | [78] |
| Raj (2019) | India | 2018 | 82 | Grey-DEMATEL | [78] |
| Bennett (2019) | UK | 211 | Structural equation modelling | [79] | |
| Ro (2019) | Korea | 2015-2016 | 1506 | Factor analysis | [80] |
| Hegner (2019) | Germany | 369 | Structural equation modelling | [81] | |
| Wintersberger (2019) | Austria | 192 | Regression analysis | [82] | |
| López-Lambas (2019) | Spain | 2018 | 6-10 per group | Descriptive statistic | [83] |
| Zarkeshev (2019) | Hungary, Kazakhstan | 70, 70 | ANOVA | [84] | |
| Tan (2019) | China | 403 | MNL, Binary Logistic Model | [85] | |
| Salonen (2019) | Finland | 2017 | 44 | Descriptive statistic | [86] |
| Hinderer (2019) | Germany | 2017 | 178 | Descriptive statistic | [87] |
| Hutchins (2019) | USA | 53 | Structural equation modelling | [88] | |
| Winter (2019) | Netherland, Germany | 282 | Discrete Choice Model | [89] | |
| Dong (2019) | USA | 2015 | 3350 | Mixed logit modeling | [90] |
| Rahman (2019) | USA | 173 | Confirmatory factor analysis | [91] | |
| Jing (2019) | China | 2018 | 906 | Structural equation modelling | [92] |
| Kettles (2019) | South Africa | 121 | Structural equation modelling | [93] | |
| Zhang (2020) | China | 2018 | 647 | Structural equation modelling | [94] |
| Methodological Criterion | Description | Score | n of Studies | Percentage |
|---|---|---|---|---|
| Assessing data collecting methodological quality | ||||
| Research design | Case-control study Longitudinal study Cross-sectional study | 3 2 1 | 5 0 70 | 6.7% 0 93.3% |
| Data acquisition path | AV ride experience and questionnaire AV Simulator and questionnaire Questionnaire only | 3 2 1 | 8 3 64 | 10.7% 4.0% 85.3% |
| Reasonable choice of sample size | Large (>300) Medium (100–300) Small (<100) | 3 2 1 | 54 14 7 | 72.0% 18.7% 9.3% |
| Assessing theory utilization | ||||
| Theory utilization | Applicating behavior theories No evidence of using theory | 1 0 | 26 49 | 34.7% 65.3% |
| Conceptualization of AV attributes or psychological factors | The AV attributes or psychological factors were defined clearly or contextually described Not defined/described | 1 0 | 67 8 | 89.3% 10.7% |
| Assessing methods utilization | ||||
| Application of statistical methods | Include Not include | 1 0 | 66 9 | 88% 12% |
| Goodness of fit test | Tested Not tested | 1 0 | 64 11 | 85.3% 14.7% |
| Parameter selection reliability testing | Tested Not tested | 1 0 | 31 44 | 41.3% 58.7% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jing, P.; Xu, G.; Chen, Y.; Shi, Y.; Zhan, F. The Determinants behind the Acceptance of Autonomous Vehicles: A Systematic Review. Sustainability 2020, 12, 1719. https://doi.org/10.3390/su12051719
Jing P, Xu G, Chen Y, Shi Y, Zhan F. The Determinants behind the Acceptance of Autonomous Vehicles: A Systematic Review. Sustainability. 2020; 12(5):1719. https://doi.org/10.3390/su12051719
Chicago/Turabian StyleJing, Peng, Gang Xu, Yuexia Chen, Yuji Shi, and Fengping Zhan. 2020. "The Determinants behind the Acceptance of Autonomous Vehicles: A Systematic Review" Sustainability 12, no. 5: 1719. https://doi.org/10.3390/su12051719
APA StyleJing, P., Xu, G., Chen, Y., Shi, Y., & Zhan, F. (2020). The Determinants behind the Acceptance of Autonomous Vehicles: A Systematic Review. Sustainability, 12(5), 1719. https://doi.org/10.3390/su12051719