
Modeling Renewable Energy Systems by a Self-Evolving Nonlinear Consequent Part Recurrent Type-2 Fuzzy System for Power Prediction

 ,
,  ,
,  and
and
Abstract
:1. Introduction
2. A Review on T2FSs
Type-2 Fuzzy Systems
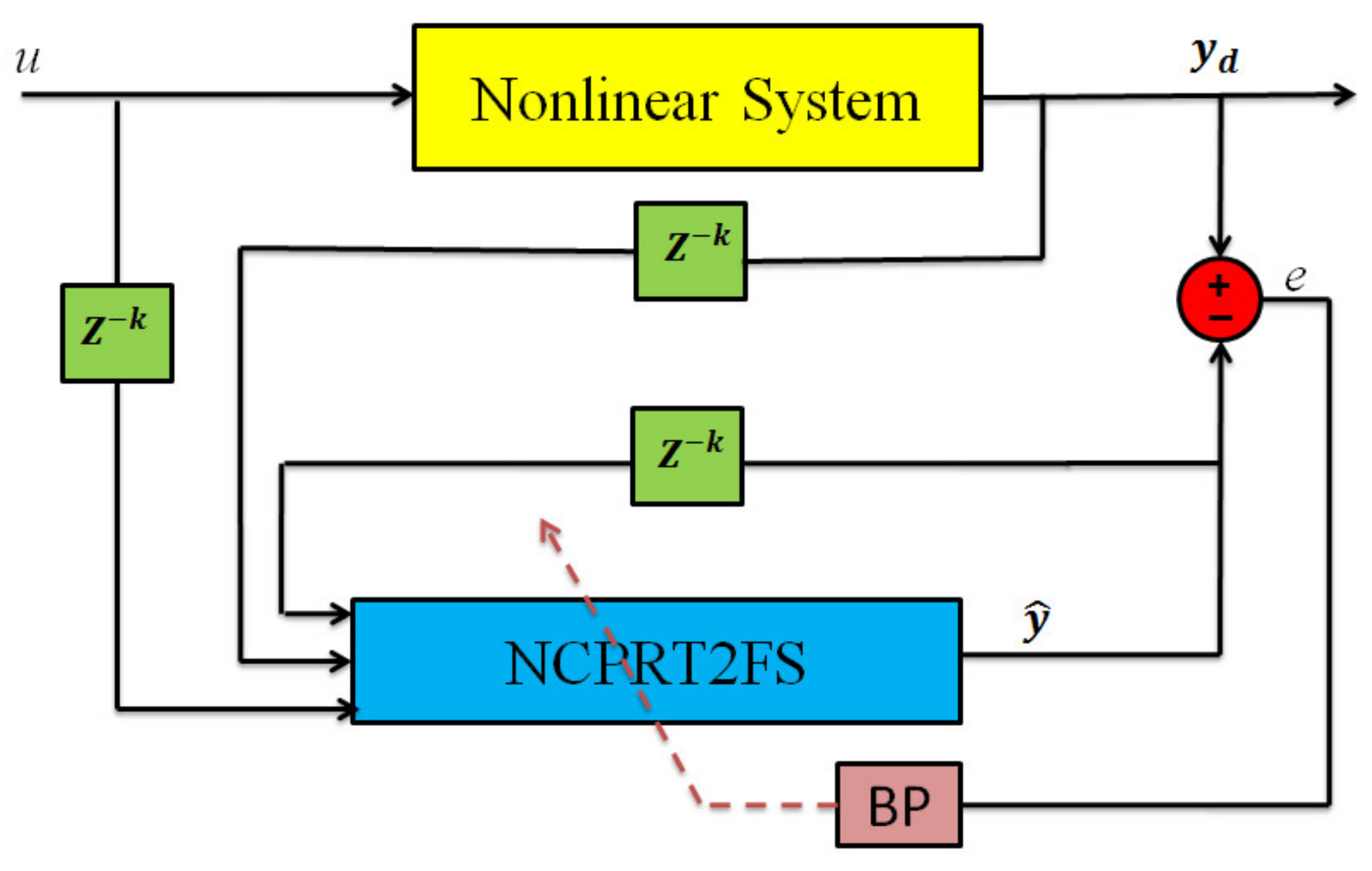
3. The Proposed NCPRT2FS
- 1)
- TSK-based T2FSs, usually yield a polynomial constructive of the inputs;
- 2)
- The outputs are represented by T1F sets [61].
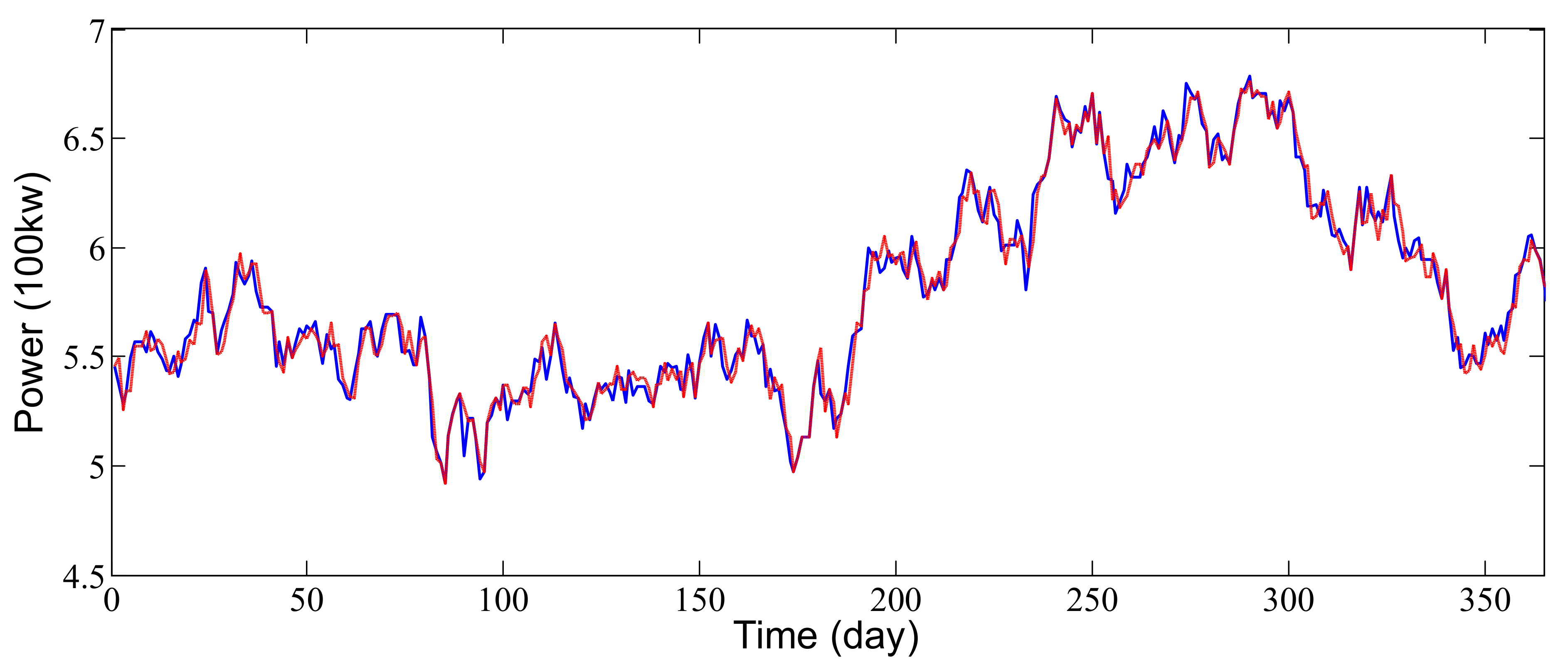
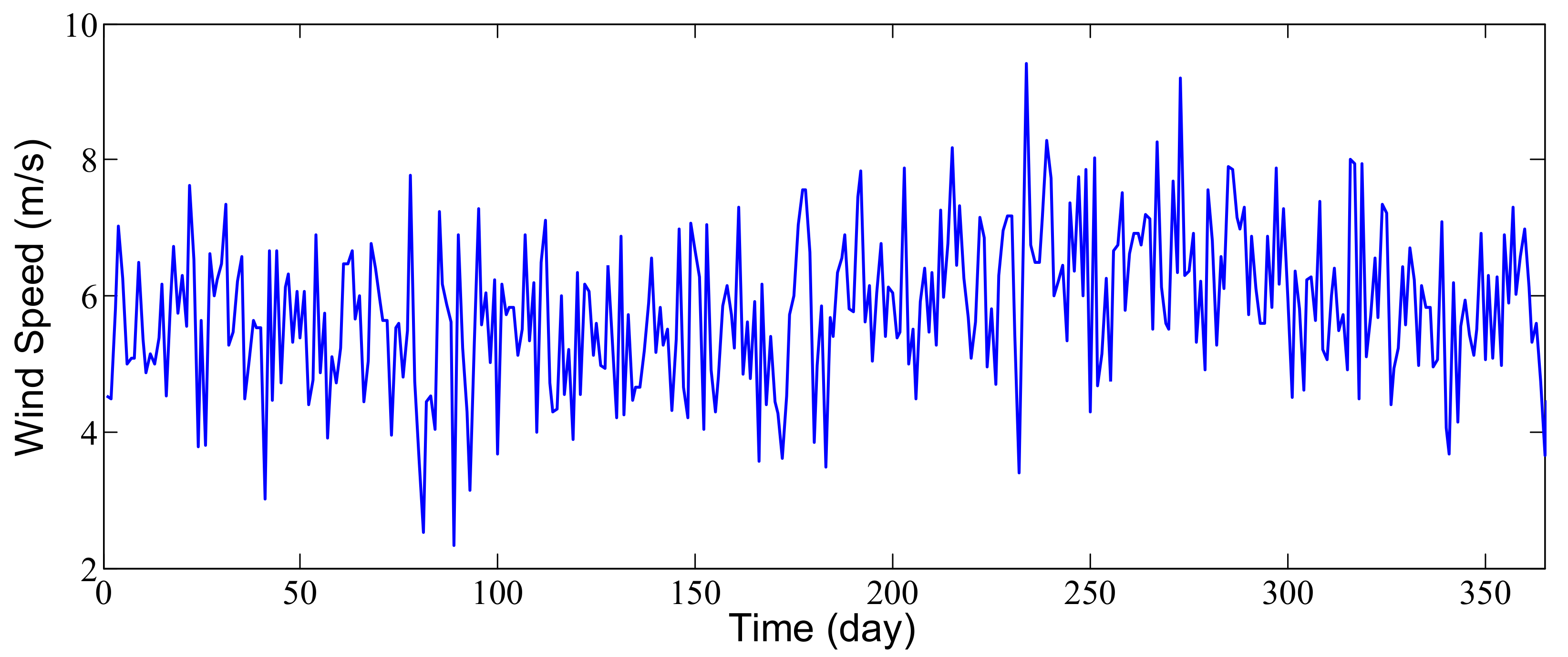
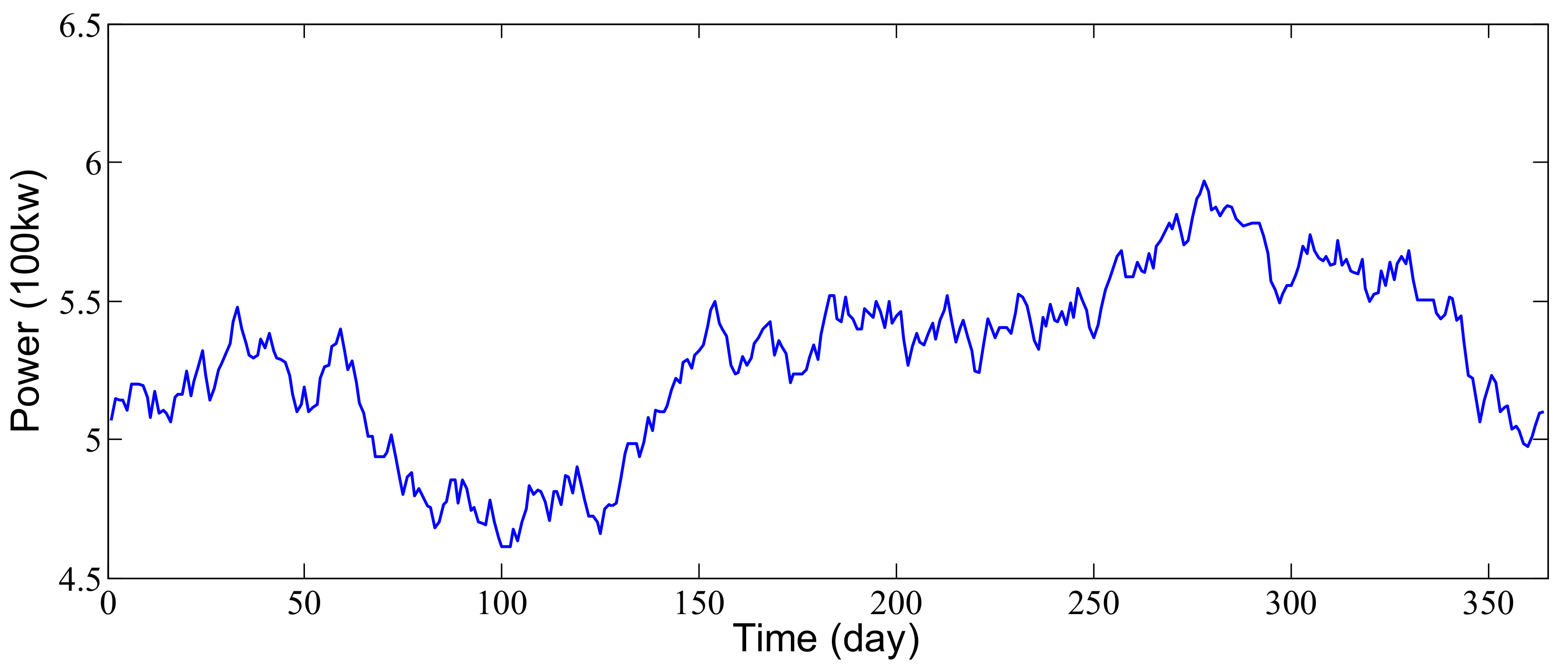
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Convergence Analysis of Learning Algorithm
References
- Quaranta, G.; Lacarbonara, W.; Masri, S.F. A review on computational intelligence for identification of nonlinear dynamical systems. Nonlinear Dyn. 2020, 99, 1709–1761. [Google Scholar] [CrossRef]
- Andrukhiv, A.; Sokil, M.; Fedushko, S.; Syerov, Y.; Kalambet, Y.; Peracek, T. Methodology for increasing the efficiency of dynamic process calculations in elastic elements of complex engineering constructions. Electronics 2021, 10, 40. [Google Scholar] [CrossRef]
- Shekhovtsov, A.; Kołodziejczyk, J.; Sałabun, W. Fuzzy Model identification using monolithic and structured approaches in decision problems with partially incomplete data. Symmetry 2020, 12, 1541. [Google Scholar] [CrossRef]
- Mombeini, H.; Yazdani-Chamzini, A.; Streimikiene, D.; Zavadskas, E.K. New fuzzy logic approach for the capability assessment of renewable energy technologies: Case of Iran. Energy Environ. 2018, 29, 511–532. [Google Scholar] [CrossRef]
- Sakthivel, K.; Devaraj, B.; Banu, D.; Narmatha Selvi, R.; Agnes Idhaya, V. A hybrid wind-solar energy system with ANFIS based MPPT controller. J. Intell. Fuzzy Syst. 2018, 35, 1579–1595. [Google Scholar]
- Shuli, L.; Xinwang, L.; Dongwei, L. A prospect theory based MADM method for solar water heater selection problems. J. Intell. Fuzzy Syst. 2017, 32, 1855–1865. [Google Scholar]
- Kaid, I.E.; Hafaifa, A.; Guemana, M.; Hadroug, N.; Kouzou, A.; Mazouz, L. Photovoltaic system failure diagnosis based on adaptive neuro fuzzy inference approach: South Algeria solar power plant. J. Clean. Prod. 2018, 204, 169–182. [Google Scholar] [CrossRef]
- Samanlioglu, F.; Ayağ, Z. A fuzzy AHP-PROMETHEE II approach for evaluation of solar power plant location alternatives in Turkey. J. Intell. Fuzzy Syst. 2017, 33, 859–871. [Google Scholar] [CrossRef]
- Grahovac, J.; Jokic, A.; Dodic, J.; Vucurovic, D.; Dodic, S. Modelling and prediction of bioethanol production from intermediates and byproduct of sugar beet processing using neural networks. Renew. Energy 2016, 85, 953–958. [Google Scholar] [CrossRef]
- Khiareddine, A.; Salah, C.B.; Mimouni, M.F. Power management of a photovoltaic/battery pumping system in agricultural experiment station. Sol. Energy 2015, 112, 319–338. [Google Scholar] [CrossRef]
- Osorio, G.J.; Matias, J.C.O.; Catalao, J.P.S. Short-term wind power forecasting using adaptive neuro-fuzzy inference system combined with evolutionary particle swarm optimization, wavelet transform and mutual information. Renew. Energy 2015, 75, 301–307. [Google Scholar] [CrossRef]
- Etemadi, M.; Abdollahi, A.; Rashidinejad, M.; Aalami, H.A. Wind turbine output power prediction in a probabilistic framework based on fuzzy intervals. Iran J. Sci. Technol. Trans. Electr. Eng. 2021, 45, 131–139. [Google Scholar] [CrossRef]
- Torshizi, A.D.; Fazel Zarandi, M.H. A new cluster validity measure based on general type-2 fuzzy sets: Application in gene expression data clustering. Knowl. Based Syst. 2014, 64, 81–93. [Google Scholar] [CrossRef]
- Hesarian, M.S.; Tavoosi, J.; Hosseini, S.H. Neuro-fuzzy modelling and experimental study of the physiological comfort of green cotton fabric based on yarn properties. Int. J. Eng. 2020, 33, 2443–2449. [Google Scholar] [CrossRef]
- Tavoosi, J. A new type-2 fuzzy sliding mode control for longitudinal aerodynamic parameters of a commercial aircraft. J. Eur. Des. Systèmes Autom. 2020, 53, 479–485. [Google Scholar] [CrossRef]
- Lu, W.; Yang, J.; Liu, X.; Pedrycz, W. The modeling and prediction of time series based on synergy of high-order fuzzy cognitive map and fuzzy c-means clustering. Knowl. Based Syst. 2014, 70, 242–255. [Google Scholar] [CrossRef]
- Abiyev, R.H.; Kaynak, O.; Kayacan, E. A type-2 fuzzy wavelet neural network for system identification and control. J. Frankl. Inst. 2013, 350, 1658–1685. [Google Scholar] [CrossRef]
- Wang, H.; Luo, C.; Wang, X. Synchronization and identification of nonlinear systems by using a novel self-evolving interval type-2 fuzzy LSTM-neural network. Eng. Appl. Artif. Intell. 2019, 81, 79–93. [Google Scholar] [CrossRef]
- Luo, C.; Tan, C.; Wang, X.; Zheng, Y. An evolving recurrent interval type-2 intuitionistic fuzzy neural network for online learning and time series prediction. Appl. Soft Comput. 2019, 78, 150–163. [Google Scholar] [CrossRef]
- El-Nagar, A. Nonlinear dynamic systems identification using recurrent interval type-2 TSK fuzzy neural network—A novel structure. ISA Trans. 2018, 72, 205–217. [Google Scholar] [CrossRef]
- Tavoosi, J.; Suratgar, A.A.; Menhaj, M.B. Nonlinear system identification based on a self-organizing type-2 fuzzy RBFN. Eng. Appl. Artif. Intell. 2016, 54, 26–38. [Google Scholar] [CrossRef]
- Anh, N.; Suresh, S.; Pratama, M.; Srikanth, N. Interval prediction of wave energy characteristics using meta-cognitive interval type-2 fuzzy inference system. Knowl. Based Syst. 2019, 169, 28–38. [Google Scholar] [CrossRef]
- Tavoosi, J.; Suratgar, A.A.; Menhaj, M.B. Stable ANFIS2 for Nonlinear System Identification. Neurocomputing 2016, 182, 235–246. [Google Scholar] [CrossRef]
- Ali, F.; Kim, E.K.; Kim, Y.G. Type-2 fuzzy ontology-based semantic knowledge for collision avoidance of autonomous underwater vehicles. Inf. Sci. 2015, 295, 441–464. [Google Scholar] [CrossRef]
- Sun, Z.; Wang, N.; Bi, Y. Type-1/type-2 fuzzy logic systems optimization with RNA genetic algorithm for double inverted pendulum. Appl. Math. Model. 2015, 39, 70–85. [Google Scholar] [CrossRef]
- Khooban, M.H.; Alfi, A.; Abadi, D.N.M. Control of a class of non-linear uncertain chaotic systems via an optimal Type-2 fuzzy proportional integral derivative controller. IET Sci. Meas. Technol. 2013, 7, 50–58. [Google Scholar] [CrossRef]
- Lee, C.H.; Chang, F.Y.; Lin, C.M. An efficient interval type-2 fuzzy CMAC for chaos time-series prediction and synchronization. IEEE Trans. Cybern. 2014, 44, 329–341. [Google Scholar] [CrossRef] [PubMed]
- Yu, W.S.; Chen, H.S. Interval type-2 fuzzy adaptive tracking control design for PMDC motor with the sector dead-zones. Inf. Sci. 2014, 288, 108–134. [Google Scholar] [CrossRef]
- Esposito, M.; Pietro, G.D. Interval type-2 fuzzy logic for encoding clinical practice guidelines. Knowl. Based Syst. 2013, 54, 329–341. [Google Scholar] [CrossRef]
- Lin, Y.Y.; Chang, J.Y.; Pal, N.R.; Lin, C.T. A Mutually recurrent interval Type-2 neural fuzzy system (MRIT2NFS) with self-evolving structure and parameters. IEEE Trans. Fuzzy Syst. 2013, 21, 492–509. [Google Scholar] [CrossRef]
- Tavoosi, J. A new Type-2 fuzzy systems for flexible-joint robot arm control. Aut J. Model. Simul. 2019, 51. [Google Scholar] [CrossRef]
- Asad, Y.P.; Shamsi, A.; Ivani, H.; Tavoosi, J. Adaptive intelligent inverse control of nonlinear systems with regard to sensor noise and parameter uncertainty (magnetic ball levitation system case study). Int. J. Smart Sens. Intell. Syst. 2016, 9, 148–169. [Google Scholar]
- Tavoosi, J.; Badamchizadeh, M.A.; Ghaemi, S. Adaptive inverse control of nonlinear dynamical system using Type-2 fuzzy neural networks. J. Control 2011, 5, 52–60. [Google Scholar]
- Fazlya, M.; Pedram, M.Z.; Salarieh, H.; Alasty, A. Parameter estimation and interval type-2 fuzzy sliding mode control of a z-axis MEMS gyroscope. ISA Trans. 2013, 52, 900–911. [Google Scholar] [CrossRef] [PubMed]
- Melin, P.; Castillo, O. A review on type-2 fuzzy logic applications in clustering, classification and pattern recognition. Appl. Soft Comput. 2014, 21, 568–577. [Google Scholar] [CrossRef]
- Wu, G.D.; Zhu, Z.W. An enhanced discriminability recurrent fuzzy neural network for temporal classification problems. Fuzzy Sets Syst. 2014, 237, 47–62. [Google Scholar] [CrossRef]
- Tavoosi, J.; Mohammadzadeh, A. A new recurrent radial basis function network-based model predictive control for a power plant boiler temperature control. Int. J. Eng. 2021, 34, 667–675. [Google Scholar]
- Moodi, H.; Farrokhi, M. Robust observer design for Sugeno systems with incremental quadratic nonlinearity in the consequent. Int. J. Appl. Math. Comput. Sci. 2013, 23, 711–723. [Google Scholar] [CrossRef]
- Tavoosi, J. A novel recurrent Type-2 fuzzy neural network stepper motor control. Mechatron. Syst. Control 2021, 49. [Google Scholar] [CrossRef]
- Tavoosi, J.; Mohammadi, F. A new Type-II fuzzy system for flexible-joint robot arm control. In Proceedings of the 6th International Conference on Control, Instrumentation and Automation (ICCIA), Sanandaj, Iran, 30–31 October 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Tavoosi, J.; Mohammadi, F. A 3-PRS parallel robot control based on Fuzzy-PID controller. In Proceedings of the 6th International Conference on Control, Instrumentation and Automation (ICCIA), Sanandaj, Iran, 30–31 October 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Tavoosi, J.; Azami, R. A New Method for controlling the speed of a surface permanent magnet synchronous motor using fuzzy comparative controller with hybrid learning. Comput. Intell. Electr. Eng. 2019, 10, 57–68. [Google Scholar]
- Tavoosi, J. An experimental study on inverse adaptive neural fuzzy control for nonlinear systems, International. J. Knowl. Based Intell. Eng. Syst. 2020, 24, 135–143. [Google Scholar] [CrossRef]
- Tavoosi, J. Stable backstepping sliding mode control Based on ANFIS2 for a class of nonlinear systems. Jordan J. Electr. Eng. 2020, 6, 49–62. [Google Scholar] [CrossRef]
- Tavoosi, J. Sliding mode control of a class of nonlinear systems based on recurrent type-2 fuzzy RBFN. Int. J. Mechatron. Autom. 2020, 7, 230–240. [Google Scholar]
- Tavoosi, J. Hybrid intelligent adaptive controller for tiltrotor UAV. Int. J. Intell. Unmanned Syst. 2020, in press. [Google Scholar] [CrossRef]
- Tavoosi, J.; Badamchizadeh, M.A. A class of type-2 fuzzy neural networks for nonlinear dynamical system identification. Neural Comput. Appl. 2013, 23, 707–717. [Google Scholar] [CrossRef]
- Tavoosi, J.; Suratgar, A.A.; Menhaj, M.B. Stability analysis of recurrent type-2 TSK fuzzy systems with nonlinear consequent part. Neural Comput. Appl. 2017, 28, 47–56. [Google Scholar] [CrossRef]
- Tavoosi, J.; Suratgar, A.A.; Menhaj, M.B. Stability analysis of a class of MIMO recurrent type-2 fuzzy systems. Int. J. Fuzzy Syst. 2017, 19, 895–908. [Google Scholar] [CrossRef]
- Jahangiri, F.; Doustmohammadi, A.; Menhaj, M.B. An adaptive wavelet differential neural networks based identifier and its stability analysis. Neurocomputing 2012, 77, 12–19. [Google Scholar] [CrossRef]
- Suratgar, A.A.; Nikravesh, S.K. A new method for linguistic modeling with stability analysis and applications. Intell. Autom. Soft Comput. 2009, 15, 329–342. [Google Scholar] [CrossRef]
- Li, C.; Wang, L.; Zhang, G.; Wang, H.; Shang, F. Functional-type single-input-rule-modules connected neural fuzzy system for wind speed prediction. J. Autom. Sin. 2017, 4, 751–762. [Google Scholar] [CrossRef]
- Karakuş, O.; Kuruoğlu, E.E.; Altınkaya, M.A. One-day ahead wind speed/power prediction based on polynomial autoregressive model. IET Renew. Power Gener. 2017, 11, 1430–1439. [Google Scholar] [CrossRef] [Green Version]
- Tian, Y.; Wang, B.; Zhu, D.; Wu, F. Takagi–Sugeno fuzzy generalised predictive control of a time-delay non-linear hydro-turbine governing system. IET Renew. Power Gener. 2019, 13, 2338–2345. [Google Scholar] [CrossRef]
- Morshedizadeh, M.; Kordestani, M.; Carriveau, R.; Ting, D.S.; Saif, M. Power production prediction of wind turbines using a fusion of MLP and ANFIS networks. IET Renew. Power Gener. 2018, 12, 1025–1033. [Google Scholar] [CrossRef]
- Castro, J.R.; Castillo, O.; Martínez, L.G. Interval Type-2 Fuzzy Logic Toolbox. Eng. Lett. 2007, 15, 1. [Google Scholar]
- Mendel, J.M. Uncertain Rule-Based Fuzzy Logic Systems: Introduction and New Directions; Prentice-Hall: Upper New Jersey River, NJ, USA, 2001. [Google Scholar]
- Mendel, J.M. Advances in type-2 fuzzy sets and systems. Inf. Sci. 2007, 177, 84–110. [Google Scholar] [CrossRef]
- Kizielewicz, B.; Sałabun, W. A new approach to identifying a multi-criteria decision model based on stochastic optimization techniques. Symmetry 2020, 12, 1551. [Google Scholar] [CrossRef]
- Karnik, N.N.; Mendel, J.M.; Liang, Q. Type-2 fuzzy logic systems. IEEE Trans. Fuzzy Syst. 1999, 7, 643–658. [Google Scholar] [CrossRef] [Green Version]
- Singh, M.; Srivastava, S.; Hanmandlu, M.; Gupta, J.R.P. Type-2 fuzzy wavelet networks (T2FWN) for system identification using fuzzy differential and Lyapunov stability algorithm. Appl. Soft Comput. 2009, 9, 977–989. [Google Scholar] [CrossRef]
- Juang, C.F.; Lin, Y.Y.; Tu, C.C. A recurrent self-evolving fuzzy neural network with local feedbacks and its application to dynamic system processing. Fuzzy Sets Syst. 2010, 161, 2552–2568. [Google Scholar] [CrossRef]
- Lin, T.C.; Kuo, C.H.; Balas, V.E. Real-time fuzzy system identification using uncertainty bounds. Neurocomputing 2014, 125, 195–216. [Google Scholar] [CrossRef]
- Pedrycz, W.; Izakian, H. Cluster–centric fuzzy modeling. IEEE Trans. Fuzzy Syst. 2014, 22, 1585–1597. [Google Scholar] [CrossRef]
- Krishnapuram, R.; Keller, J.M. A possibilistic approach to clustering. IEEE Trans. Fuzzy Syst. 1993, 1, 98–110. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cut-in wind speed: | 4 m/s | ||
| Survival wind speed: | 60 m/s | ||
| Rated wind speed: | 15 m/s | ||
| Cut-out wind speed: | 25 m/s | ||
| Rotor: | Generator: | ||
| Number of blades: | 3 | Type: | Asynchronous |
| Swept area: | 1.735 m2 | Number: | 1.0 |
| Type: | 22.90 | Grid connection: | Thyristor |
| Rotor speed, max: | 28.50 U/min | ||
| Tipspeed: | 70.10 m/s | Voltage: | 400 V |
| Diameter: | 47 m | Speed, max: | 1.650 U/min |
| Material: | GFK | Grid frequency: | 50 Hz |
| Antecedent parameters | ||||||||
| u(k) | ||||||||
| y(k-1) | ||||||||
| fourth layer adaptive weights | ||||||||
| consequent parameters | Rule 1 | Rule 2 | Rule 3 | Rule 4 | Rule 1 | Rule 2 | Rule 3 | Rule 4 |
| Antecedent parameters | ||||||||
| u(k) | ||||||||
| y(k-1) | ||||||||
| fourth layer adaptive weights | ||||||||
| consequent parameters | Rule 1 | Rule 2 | Rule 3 | Rule 1 | Rule 2 | Rule 3 | ||
| 0 | ||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tavoosi, J.; Suratgar, A.A.; Menhaj, M.B.; Mosavi, A.; Mohammadzadeh, A.; Ranjbar, E. Modeling Renewable Energy Systems by a Self-Evolving Nonlinear Consequent Part Recurrent Type-2 Fuzzy System for Power Prediction. Sustainability 2021, 13, 3301. https://doi.org/10.3390/su13063301
Tavoosi J, Suratgar AA, Menhaj MB, Mosavi A, Mohammadzadeh A, Ranjbar E. Modeling Renewable Energy Systems by a Self-Evolving Nonlinear Consequent Part Recurrent Type-2 Fuzzy System for Power Prediction. Sustainability. 2021; 13(6):3301. https://doi.org/10.3390/su13063301
Chicago/Turabian StyleTavoosi, Jafar, Amir Abolfazl Suratgar, Mohammad Bagher Menhaj, Amir Mosavi, Ardashir Mohammadzadeh, and Ehsan Ranjbar. 2021. "Modeling Renewable Energy Systems by a Self-Evolving Nonlinear Consequent Part Recurrent Type-2 Fuzzy System for Power Prediction" Sustainability 13, no. 6: 3301. https://doi.org/10.3390/su13063301
APA StyleTavoosi, J., Suratgar, A. A., Menhaj, M. B., Mosavi, A., Mohammadzadeh, A., & Ranjbar, E. (2021). Modeling Renewable Energy Systems by a Self-Evolving Nonlinear Consequent Part Recurrent Type-2 Fuzzy System for Power Prediction. Sustainability, 13(6), 3301. https://doi.org/10.3390/su13063301