
Control of Permanent Magnet Synchronous Motor Using MPC–MTPA Control for Deployment in Electric Tractor

Abstract
:1. Introduction
2. Mathematical Modeling
2.1. Modeling of Electric Tractor
2.2. Modeling of PMSM
2.3. MTPA Modeling
3. Farmland Working Conditions for the Load Calculations
4. MPC Control
5. HIL Implementation
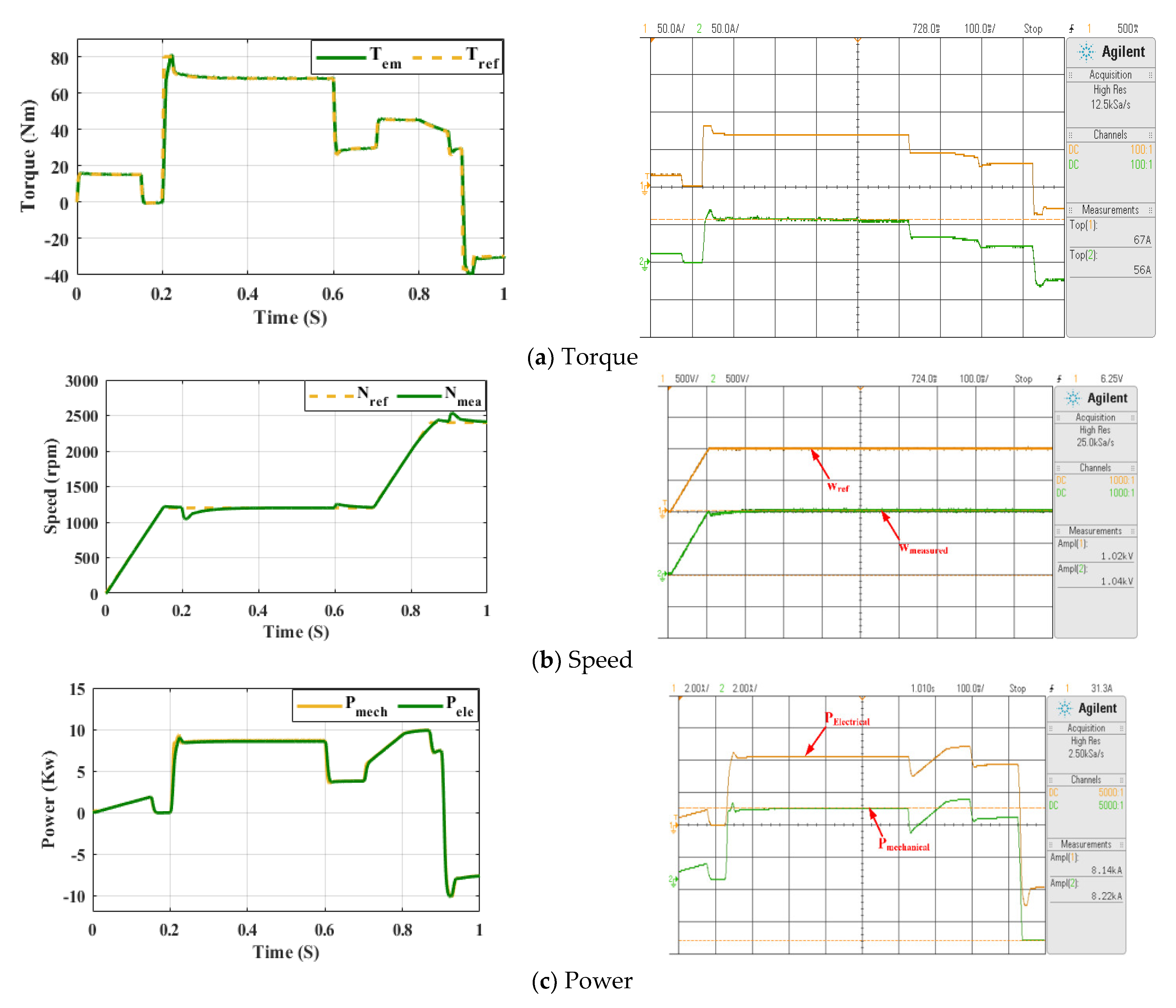
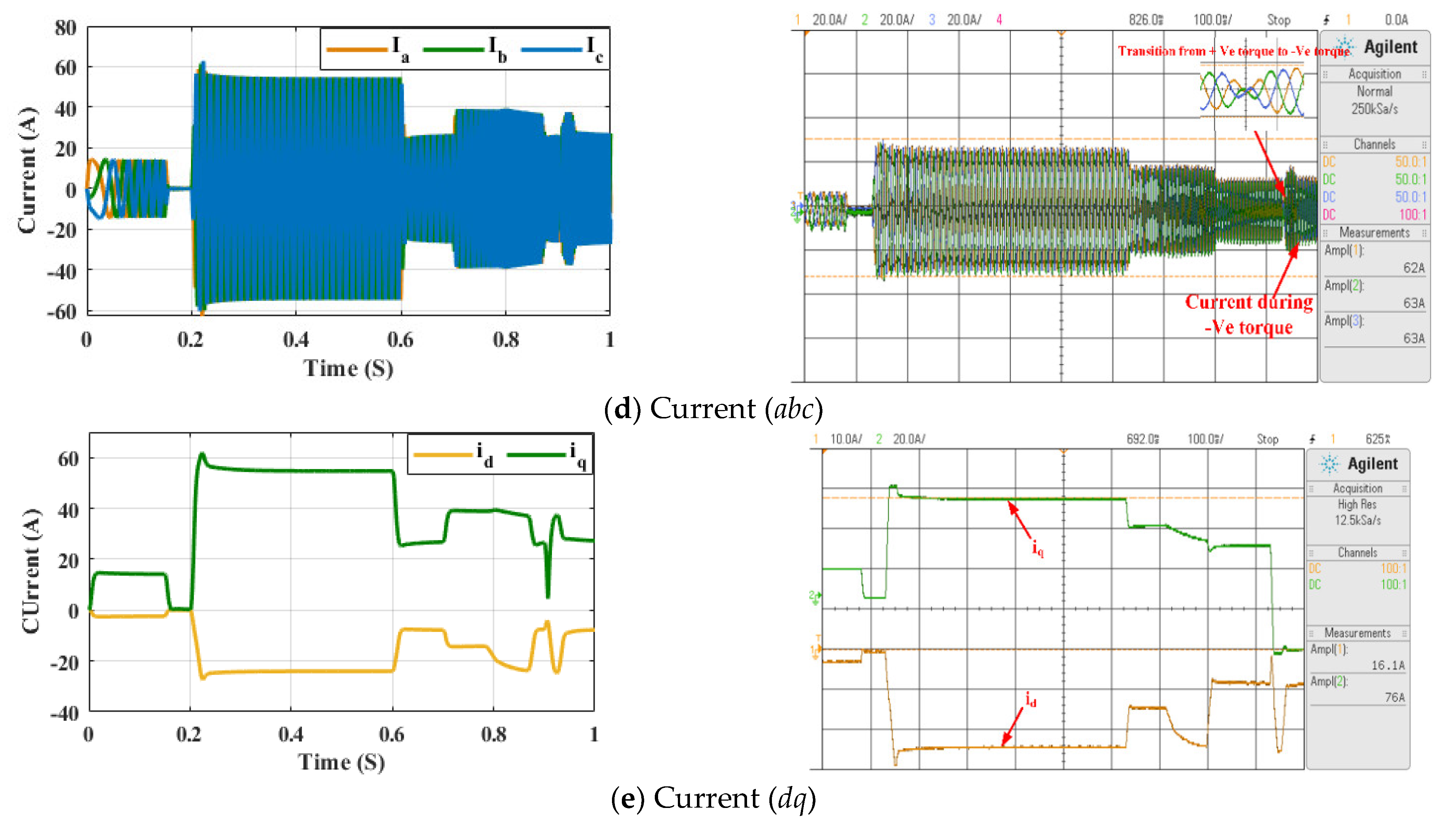
6. Result and Discussion
6.1. Case 1
6.2. Case 2
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Rolling resistance force | |
| Aerodynamic drag force | |
| Grading resistance force | |
| Acceleration force | |
| Implement draft force | |
| F | Soil texture adjustment parameter (dimensionless). For fine-textured soil i = 1, 2 for medium, and 3 for coarse-textured soils. |
| A, B, C | Machine specific parameters |
| V | Operating velocity of tractor |
| W | Machine width or number of rows |
| Mass of the tractor | |
| Gravitational constant | |
| Coefficient of rolling resistance | |
| Gradient angle | |
| Air density | |
| Drag coefficient | |
| Frontal area of the tractor | |
| V | Operating velocity |
| Gross weight of the tractor | |
| Gross weight of the trailer | |
| Inertia | |
| Radius of the wheel | |
| Gear ratio | |
| Efficiency of the transmission system | |
| Torque at wheels | |
| Shaft torque | |
| Load torque | |
| Angular velocity | |
| Equivalent inertia of the tractor | |
| Voltage of d and q axis | |
| Current of d and q axis | |
| d-axis inductance | |
| Electrical angular velocity | |
| q-axis inductance | |
| Rs | Stator resistance |
| Flux linkages | |
| No. of pole pairs | |
| B | Friction coefficient |
| Stator current | |
| Torque angle | |
| Sampling time | |
| dc voltage | |
| State variables at sampling time | |
| Predicted future state variables at sampling time | |
| Rotor angle |
References
- Nagar, H.; Shwetanshu; Bisaria, S.; Dalei, A.; Reddy, G.C.; Sultana, W.R.; Chitra, A. Powertrain Sizing and Performance Evaluation for Battery Electric Vehicle Using Model Based Design. In Proceedings of the 2021 Innovations in Power and Advanced Computing Technologies (i-PACT), Kuala Lumpur, Malaysia, 27–29 November 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar]
- Taha, Z.; Passarella, R.; Rahim, N.A.; Sah, J.M. Driving force characteristic and power consumption of 4.75 kW permanent magnet motor for a solar vehicle. J. Eng. Appl. Sci. 2010, 5, 26–31. [Google Scholar]
- Vogt, H.H.; de Melo, R.R.; Daher, S.; Schmuelling, B.; Antunes, F.L.M.; dos Santos, P.A.; Albiero, D. Electric tractor system for family farming: Increased autonomy and economic feasibility for an energy transition. J. Energy Storage 2021, 40, 102744. [Google Scholar] [CrossRef]
- Xun, Q.; Liu, Y.; Zhao, N. Energy Efficiency Comparison of Hybrid Powertrain Systems for Fuel-Cell-Based Electric Vehicles. In Proceedings of the 2020 IEEE Transportation Electrification Conference and Expo, ITEC, Chicago, IL, USA, 23–26 June 2020. [Google Scholar] [CrossRef]
- Ghobadpour, A.; Mousazadeh, H.; Kelouwani, S.; Malvajerdi, A.S.; Rafiee, S. Design, development, and evaluation of a PV_Bio-Gen range extender for an off-road electric vehicle. Int. J. Renew. Energy Res. 2020, 10, 388–399. [Google Scholar]
- Wang, B.; Xu, M.; Yang, L. Study on the economic and environmental benefits of different EV powertrain topologies. Energy Convers. Manag. 2014, 86, 916–926. [Google Scholar] [CrossRef]
- Dang, L.; Bernard, N.; Bracikowski, N.; Berthiau, G. Design Optimization with Flux Weakening of High-Speed PMSM for Electrical Vehicle Considering the Driving Cycle. IEEE Trans. Ind. Electron. 2017, 64, 9834–9843. [Google Scholar] [CrossRef]
- Zhang, Y.; Cao, W.; McLoone, S.; Morrow, J. Design and Flux-Weakening Control of an Interior Permanent Magnet Synchronous Motor for Electric Vehicles. IEEE Trans. Appl. Supercond. 2016, 26, 1–6. [Google Scholar] [CrossRef]
- Xie, W.; Wang, X.; Wang, F.; Xu, W.; Kennel, R.M.; Gerling, D.; Lorenz, R.D. Finite-Control-Set Model Predictive Torque Control with a Deadbeat Solution for PMSM Drives. IEEE Trans. Ind. Electron. 2015, 62, 5402–5410. [Google Scholar] [CrossRef]
- Nemeth, T.; Bubert, A.; Becker, J.N.; de Doncker, R.W.; Sauer, D.U. A Simulation Platform for Optimization of Electric Vehicles with Modular Drivetrain Topologies. IEEE Trans. Transp. Electrif. 2018, 4, 888–900. [Google Scholar] [CrossRef]
- Huang, S.; Wu, G.; Rong, F.; Zhang, C.; Huang, S.; Wu, Q. Novel Predictive Stator Flux Control Techniques for PMSM Drives. IEEE Trans. Power Electron. 2019, 34, 8916–8929. [Google Scholar] [CrossRef]
- Li, G.; Hu, J.; Li, Y.; Zhu, J. An Improved Model Predictive Direct Torque Control Strategy for Reducing Harmonic Currents and Torque Ripples of Five-Phase Permanent Magnet Synchronous Motors. IEEE Trans. Ind. Electron. 2019, 66, 5820–5829. [Google Scholar] [CrossRef]
- Morales-Caporal, R.; Leal-Lopez, M.E.; de Jesus Rangel-Magdaleno, J.; Sandre-Hernandez, O.; Cruz-Vega, I. Direct Torque Control of a PMSM-Drive for Electric Vehicle Applications. In Proceedings of the 2018 International Conference on Electronics, Communications and Computers (CONIELECOMP), Cholula, Mexico, 21–23 February 2018; IEEE: Piscataway, NJ, USA, 2018; Volume 2018, pp. 232–237. [Google Scholar]
- Shinohara, A.; Inoue, Y.; Morimoto, S.; Sanada, M. Maximum Torque Per Ampere Control in Stator Flux Linkage Synchronous Frame for DTC-Based PMSM Drives Without Using q-Axis Inductance. IEEE Trans. Ind. Appl. 2017, 53, 3663–3671. [Google Scholar] [CrossRef]
- Abassi, M.; Khlaief, A.; Saadaoui, O.; Chaari, A.; Boussak, M. Performance Analysis of FOC and DTC for PMSM Drives Using SVPWM Technique. In Proceedings of the 2015 16th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Monastir, Tunisia, 21–23 December 2016; pp. 228–233. [Google Scholar] [CrossRef]
- Liu, Q.; Hameyer, K. Torque Ripple Minimization for Direct Torque Control of PMSM With Modified FCSMPC. IEEE Trans. Ind. Appl. 2016, 52, 4855–4864. [Google Scholar] [CrossRef]
- Zhang, H.; Dou, M.; Deng, J. Loss-Minimization Strategy of Nonsinusoidal Back EMF PMSM in Multiple Synchronous Reference Frames. IEEE Trans. Power Electron. 2020, 35, 8335–8346. [Google Scholar] [CrossRef]
- Yang, R.; Sun, T.; Feng, W.; He, S.; Zhu, S.; Chen, X. Accurate online MTPA control of IPMSM considering derivative terms. Chin. J. Electr. Eng. 2021, 7, 100–110. [Google Scholar] [CrossRef]
- Sakunthala, S.; Kiranmayi, R.; Mandadi, P.N. Investigation of PI and Fuzzy Controllers for Speed Control of PMSM Motor Drive. In Proceedings of the 2018 International Conference on Recent Trends in Electrical, Control and Communication (RTECC), Malaysia, Malaysia, 20–22 March 2018; pp. 133–136. [Google Scholar] [CrossRef]
- Perera, A.; Nilsen, R. Gauss-Newton: A Prediction-Error-Gradient based Algorithm to Track PMSM Parameters Online. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Jaipur, India, 16–19 December 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, K. Current Prediction Based Zero Sequence Current Suppression Strategy for the Semicontrolled Open-Winding PMSM Generation System with a Common DC Bus. IEEE Trans. Ind. Electron. 2018, 65, 6066–6076. [Google Scholar] [CrossRef]
- Razia Sultana, W.; Lodhi, A.; Gade, C.R.; Chitra, A.; Vanishree, J.; Manimozhi, M. Model Predictive Control of Quasi-Z-Source Inverter. In Lecture Notes in Electrical Engineering; Springer: Berlin/Heidelberg, Germany, 2021; Volume 700, pp. 3051–3062. ISBN 9789811582202. [Google Scholar]
- Murali, A.; Wahab, R.S.; Gade, C.S.R.; Annamalai, C.; Subramaniam, U. Assessing Finite Control Set Model Predictive Speed Controlled PMSM Performance for Deployment in Electric Vehicles. World Electr. Veh. J. 2021, 12, 41. [Google Scholar] [CrossRef]
- Cash, S.; Zhou, Q.; Olatunbosun, O.; Xu, H.; Davis, S.; Shaw, R. New traction motor sizing strategy for an HEV/EV based on an overcurrent-tolerant prediction model. IET Intell. Transp. Syst. 2019, 13, 168–174. [Google Scholar] [CrossRef]
- Ahmed, A.; Akl, M.; Rashad, E.E.M. A comparative dynamic analysis between model predictive torque control and field-oriented torque control of IM drives for electric vehicles. Int. Trans. Electr. Energy Syst. 2021, 31, e13089. [Google Scholar] [CrossRef]
- American Society of Agricultural and Biological Engineers. Test; ASABE: St. Joseph, MI, USA, 2011; p. 9. [Google Scholar]
- BOZTAŞ, G. Comparative Modelling and Experimental Verification of a PMSM Drive System. Eur. J. Tech. 2022, 12, 82–88. [Google Scholar] [CrossRef]
- Dianov, A.; Tinazzi, F.; Calligaro, S.; Bolognani, S. Review and Classification of MTPA Control Algorithms for Synchronous Motors. IEEE Trans. Power Electron. 2022, 37, 3990–4007. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | ICET | ET | HET | PHET | FCET | |
|---|---|---|---|---|---|---|
| Energy storage | Fuel tank | Battery Ultra-capacitor | Fuel tank Battery Ultra-capacitor | Fuel tank Battery Ultra-capacitor | Fuel cell Battery Ultra-capacitor | |
| Energy source | Petrol/diesel | Electric energy | Petrol/diesel and electric energy | Petrol/diesel and electric energy | Hydrogen | |
| Energy source Infrastructure | Refueling station | Charging station | Refueling station | Refueling station and charging station | Hydrogen refinery | |
| Propulsion system | ICE | Electric motor | ICE and electric motor | ICE and electric motor | Electric motor | |
| Efficiency | Well–tank | 88.00% | 37.00% | 88.00% | - | 58.4% |
| Tank–wheel | 12.1% | 83.00% | 22.3% | - | 46.6% | |
| Well–wheel | 10.6% | 31.3% | 19.6% | - | 27.2% | |
| Smooth operation | No | Yes | Yes | Yes | Yes | |
| Emission | Very high | Zero | Low | Very low | Ultra-low | |
| System complexity | Very low | Low | Moderate | High | Very high | |
| Sa | Sb | Sc | Voltage Vector (V) |
|---|---|---|---|
| 0 | 0 | 0 | |
| 1 | 0 | 0 | |
| 1 | 1 | 0 | |
| 0 | 1 | 0 | |
| 0 | 1 | 1 | |
| 0 | 0 | 1 | |
| 1 | 0 | 1 | |
| 1 | 1 | 1 |
| Device Name | OP5700 |
|---|---|
| FPGA | Xilinx Vertex 7 FPGA on VC707 board, 485T, 485, 760 Logic cells, 2800 DSP slices |
| I/O lines | 256 lines, 8 analogue or digital, 16 or 32 channels |
| High-speed communication ports | 16 SFP sockets, up to 5 Gbps |
| I/O connectors | 4 panels of 4 DB37F connectors |
| Monitoring connectors | 4 panels of RJ45 connectors |
| PC interface | Standard PC connectors (monitor, keyboard, mouse, and network) |
| Power supply | Input: 100–240 VAC, 50–60 Hz, 8 A–4 A. Power: 600 W |
| Parameter | Value (Units) |
|---|---|
| Stator resistance (Rs) | 0.0065 (ohm) |
| d-axis inductance (Ld) | 1.597 (mH) |
| q-axis inductance (Lq) | 2.057 (mH) |
| Trated | 80 (Nm) |
| Nrated | 1200 (rpm) |
| ) | 0.1757 |
| Pole pairs | 4 |
| Vdc | 560 (V) |
| Inertia (Jm) | 0.09 (kg·m2) |
| Friction coefficient (Bm) | 0.002 (Nms) |
| Load | Current | Current Reduction (%) | Loss Reduction (%) | |
|---|---|---|---|---|
| Without MTPA | With MTPA | |||
| Full Load | 85 | 69 | 16.47 | 34 |
| 3/4 Load | 63.5 | 55 | 13.4 | 25 |
| Half Load | 42 | 38 | 9.5 | 18 |
| 1/4 Load | 21.4 | 20.5 | 4.2 | 8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gade, C.R.; W, R.S. Control of Permanent Magnet Synchronous Motor Using MPC–MTPA Control for Deployment in Electric Tractor. Sustainability 2022, 14, 12428. https://doi.org/10.3390/su141912428
Gade CR, W RS. Control of Permanent Magnet Synchronous Motor Using MPC–MTPA Control for Deployment in Electric Tractor. Sustainability. 2022; 14(19):12428. https://doi.org/10.3390/su141912428
Chicago/Turabian StyleGade, Chandrasekhar Reddy, and Razia Sultana W. 2022. "Control of Permanent Magnet Synchronous Motor Using MPC–MTPA Control for Deployment in Electric Tractor" Sustainability 14, no. 19: 12428. https://doi.org/10.3390/su141912428
APA StyleGade, C. R., & W, R. S. (2022). Control of Permanent Magnet Synchronous Motor Using MPC–MTPA Control for Deployment in Electric Tractor. Sustainability, 14(19), 12428. https://doi.org/10.3390/su141912428