
Aquila Optimization Based Harmonic Elimination in a Modified H-Bridge Inverter

 ,
,  ,
,  ,
,  , ,
, ,  and
and
Abstract
:1. Introduction
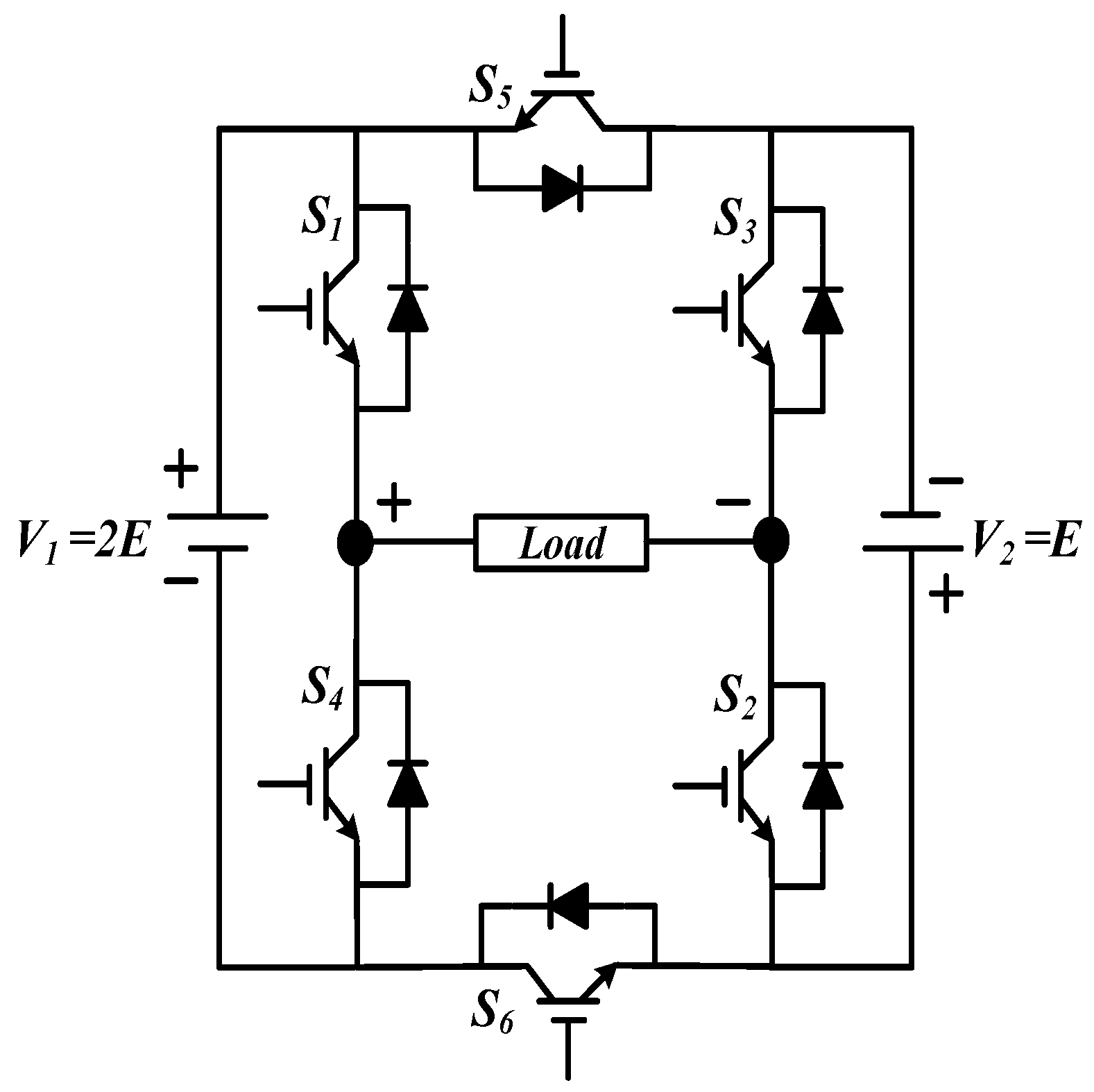
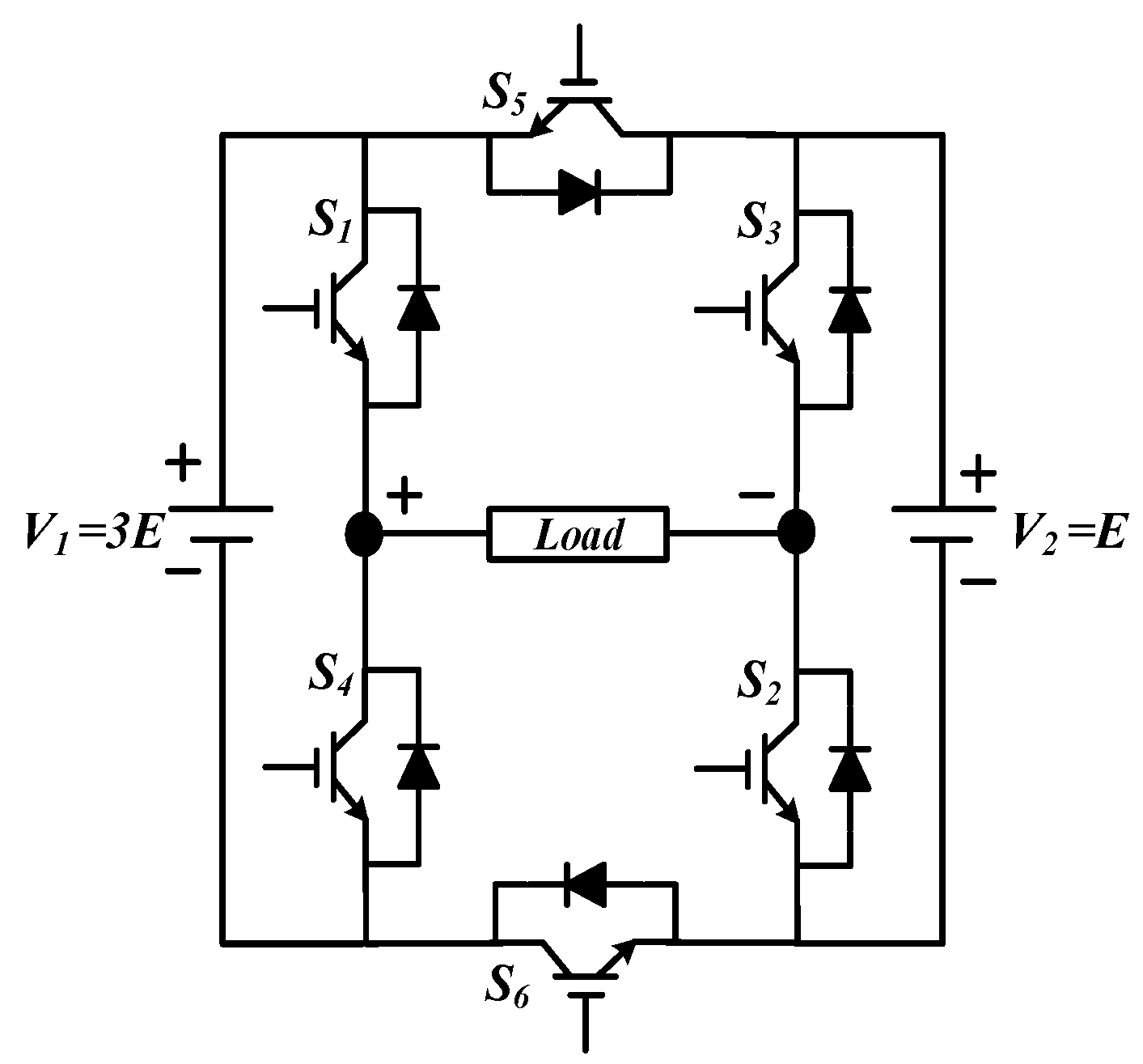
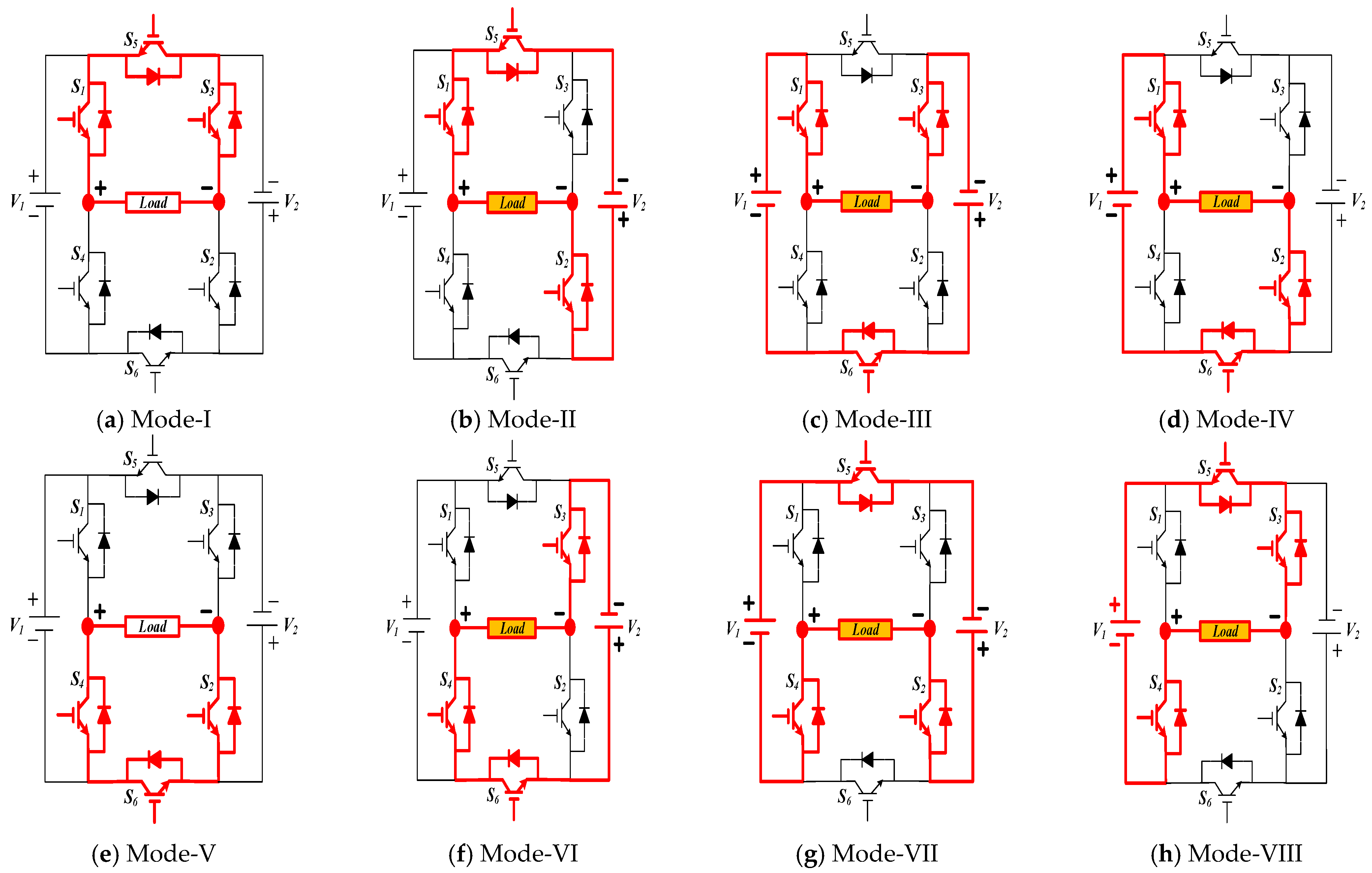
2. Seven Level Modified H-Bridge Inverter
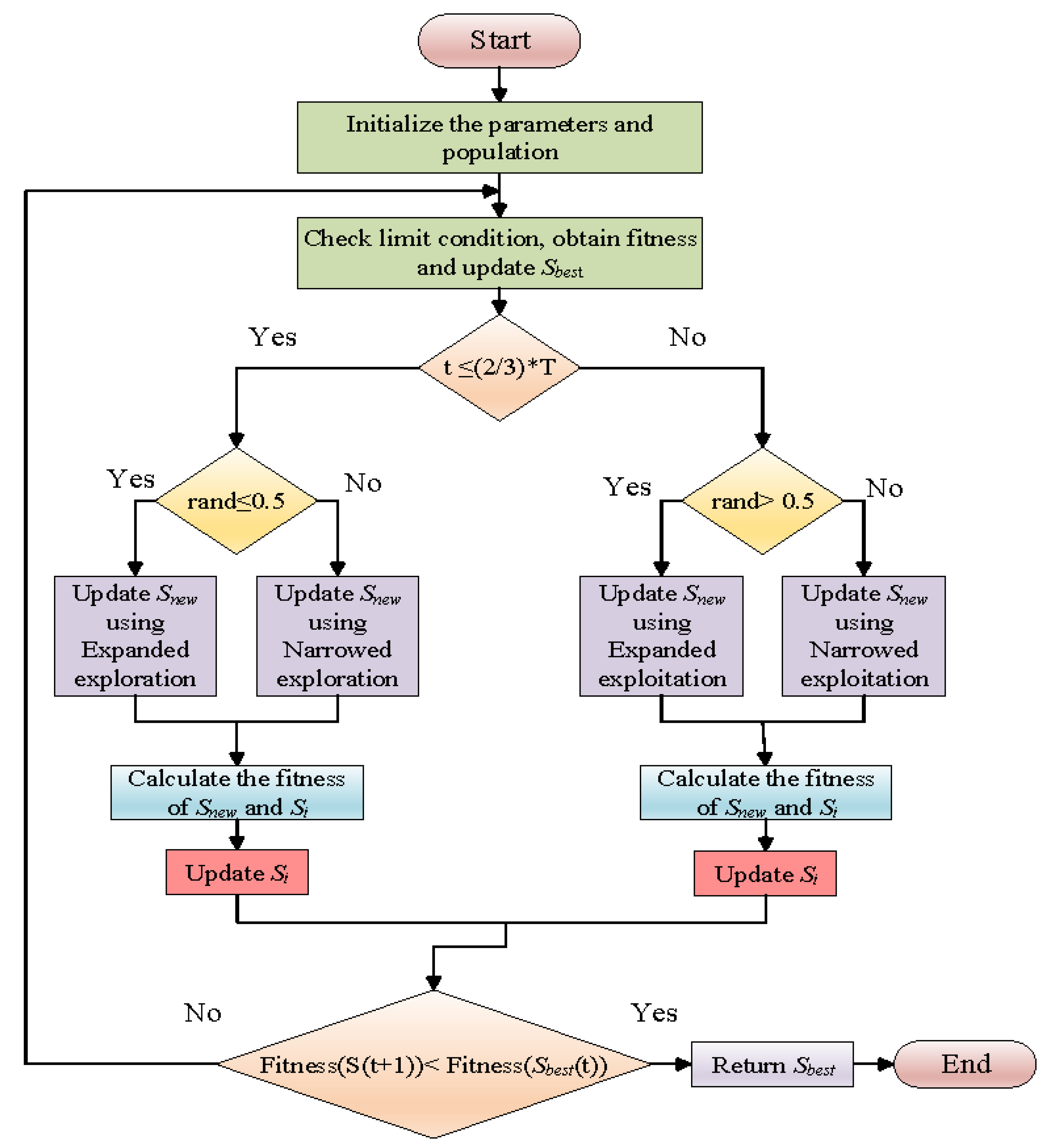
3. Aquila Optimizer: A Metaheuristic Optimization Algorithm
- For hunting birds in flight, the first method, to high soar with a vertical stoop, is used, in which the Aquila rises high above the ground. The Aquila enters a long, low-angled glide once it has found prey, with speed increasing as the wings shut farther. The Aquila must have a height advantage over its target for this approach to work. To simulate a thunderclap, the wings and tail are unfolded just before the engagement, and the feet are propelled forward to seize the prey.
- The second approach, the contour flight with brief glide attack, is considered as Aquila’s most commonly employed method, in which the Aquila rises from the ground at a low level. Whether the prey is running or flying, the prey is pursued carefully. This strategy is ideal for hunting ground squirrels, breeding grouse, or seabirds.
- A low flight with a slow downward attack is the third method. In this case, the Aquila dives to the ground and then attacks the prey one by one. The Aquila chooses its target and lands on its neck and back, attempting to enter. This approach is used for hunting slow prey like rattlesnakes, hedgehogs, foxes, and tortoises, as well as any species that lacks an escape response.
- Walking and grabbing prey is the fourth approach, in which the Aquila wanders on land and tries to draw its prey. It is used to remove the young of large prey animals (such as deer or sheep) from the covered area.
3.1. Initialization of the Solution
3.2. Mathematical Modeling of AO
3.2.1. Expanded Exploitation ()
3.2.2. Narrowed Exploitation ()
3.2.3. Expanded Exploitation ()
3.2.4. Narrowed Exploitation ()
3.2.5. Selective Harmonic Elimination using Aquila Optimizer
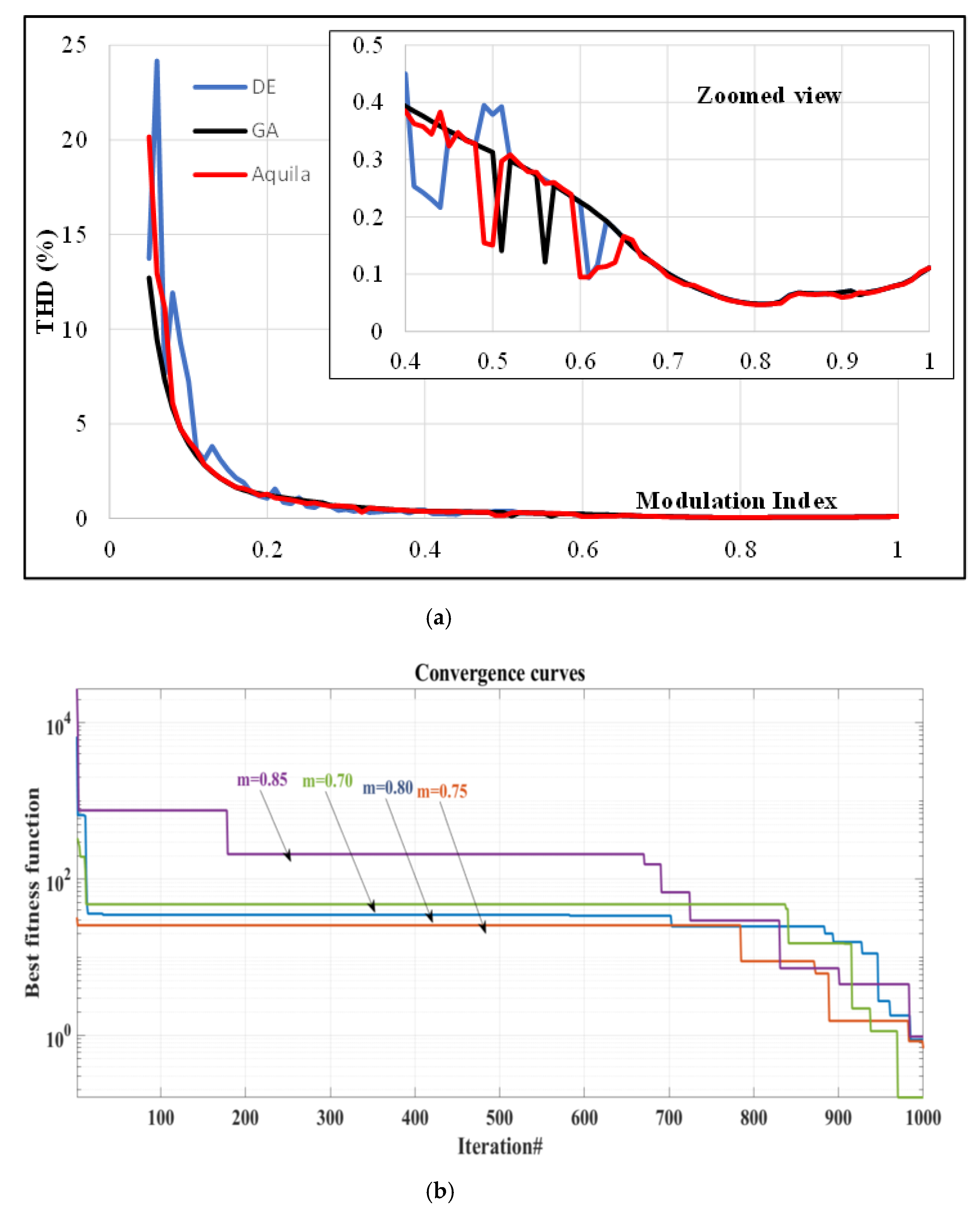
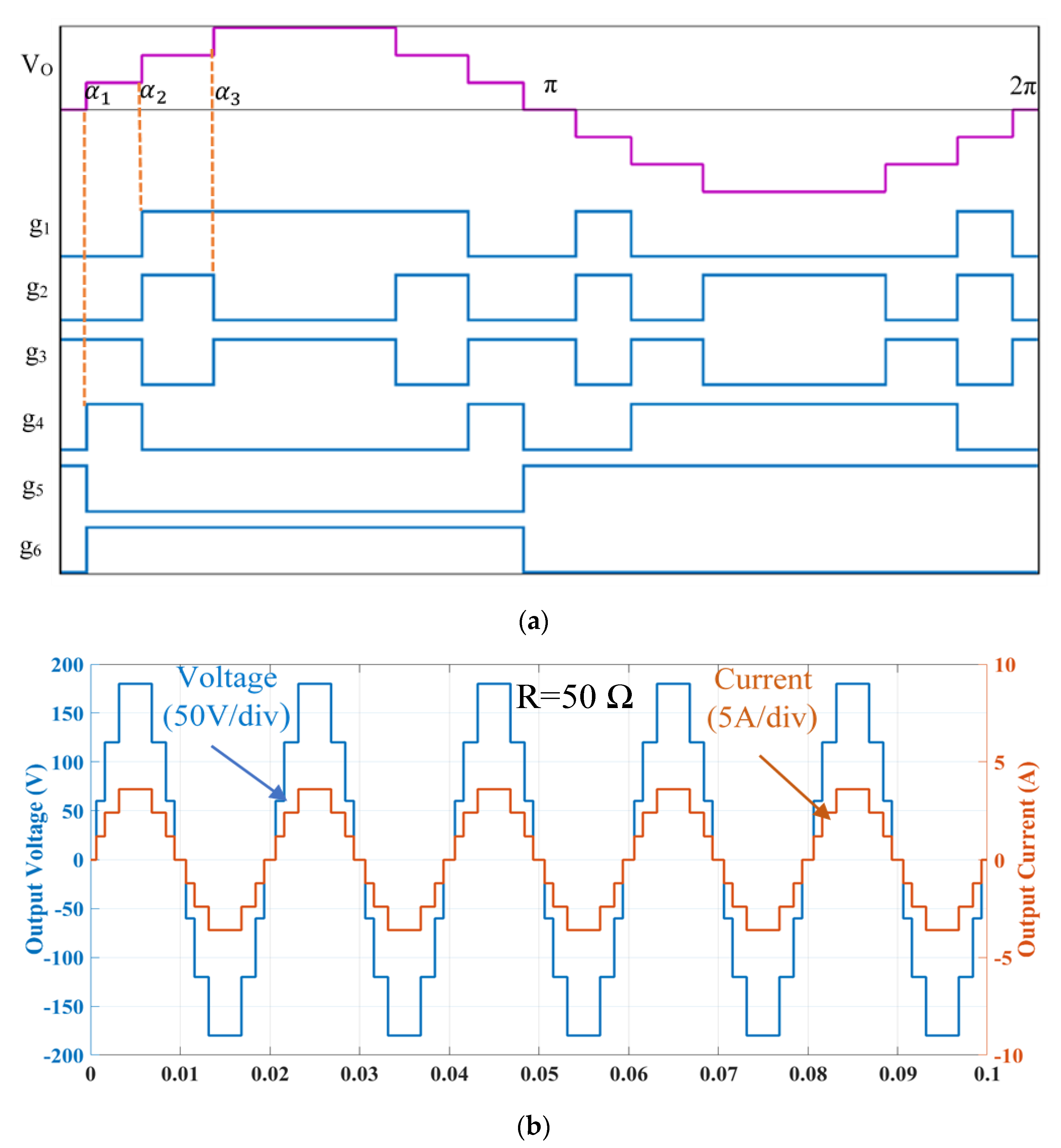
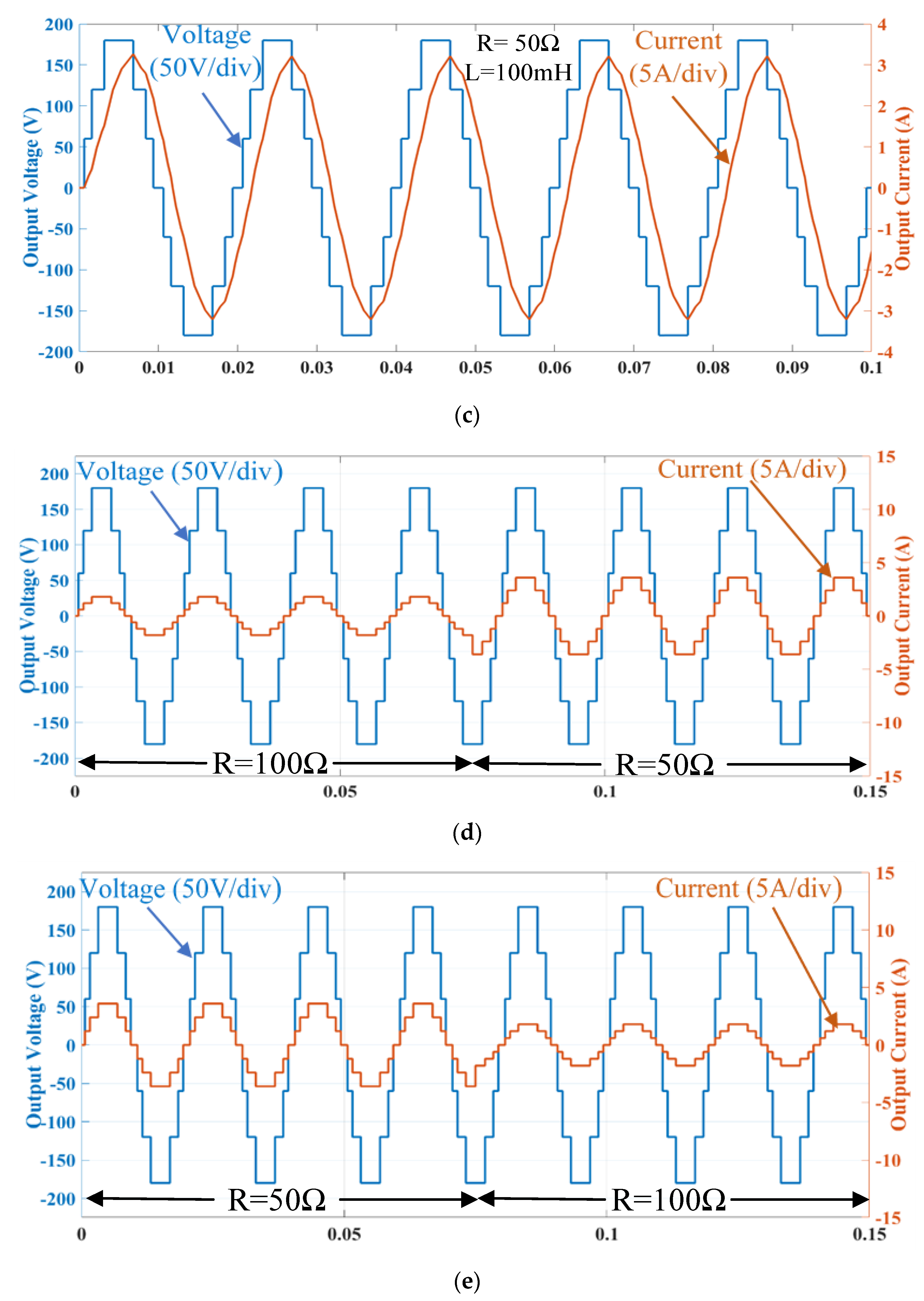
4. Simulation Results
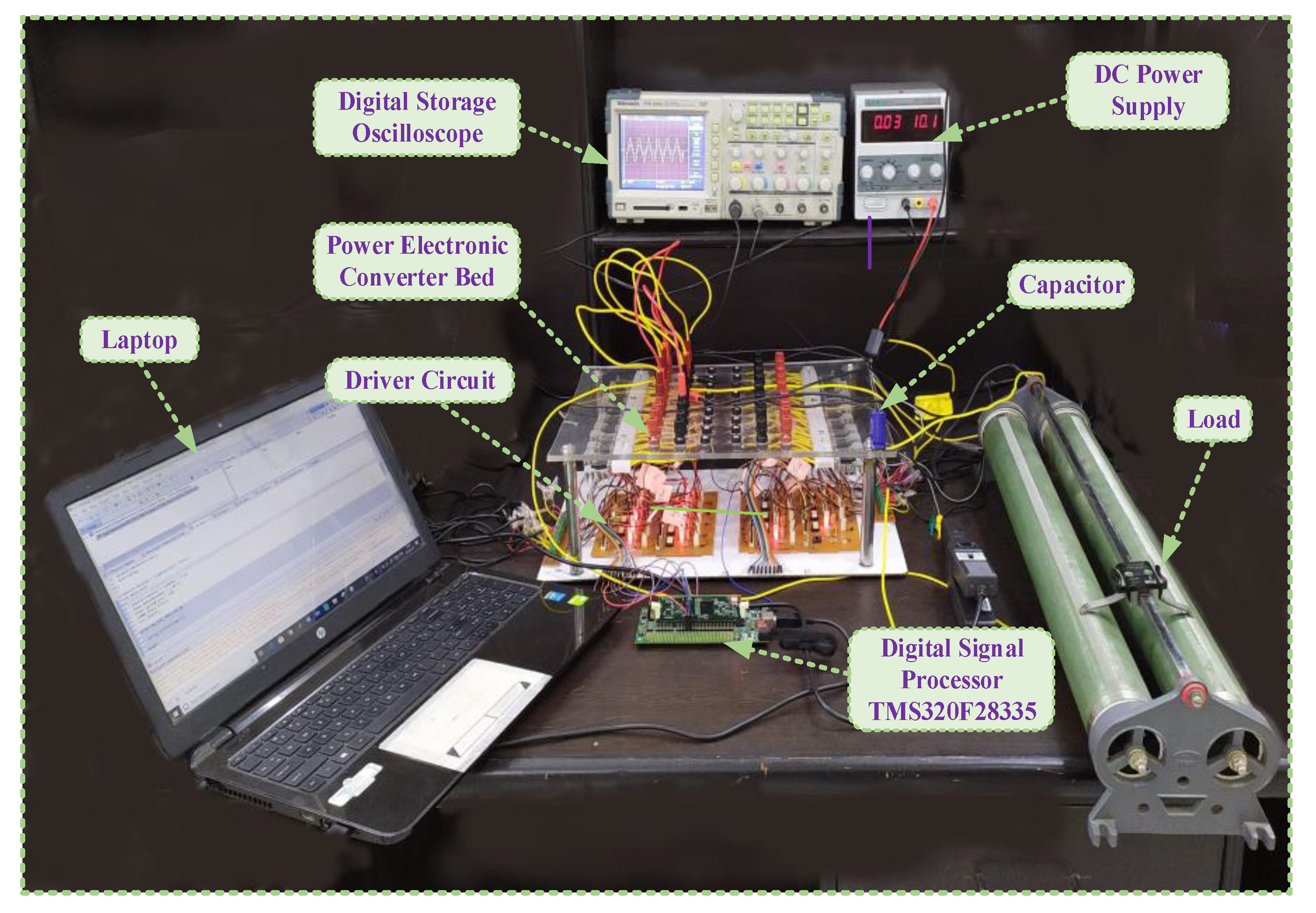
5. Experimental Validation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sarwar, M.I.; Sarwar, A.; Farooqui, S.A.; Tariq, M.; Fahad, M.; Beig, A.R.; Alamri, B. A Hybrid Nearest Level Combined with PWM Control Strategy: Analysis and Implementation on Cascaded H-Bridge Multilevel Inverter and its Fault Tolerant Topology. IEEE Access 2021, 9, 44266–44282. [Google Scholar] [CrossRef]
- Kumari, M.; Siddique, M.D.; Sarwar, A.; Tariq, M.; Mekhilef, S.; Iqbal, A. Recent trends and review on switched-capacitor-based single-stage boost multilevel inverter. Int. Trans. Electr. Energy Syst. 2021, 31, e12730. [Google Scholar] [CrossRef]
- Sarwar, A.; Sarwar, I.; Alam, S.; Ahmad, S.; Tariq, M. A Nine-Level Cascaded Multilevel Inverter with Reduced Switch Count and Lower Harmonics. In Lecture Notes in Electrical Engineering; Springer: Singapore, 2019; Volume 553, pp. 723–738. [Google Scholar]
- Raman, S.R.; Cheng, K.W.E.; Ye, Y. Multi-Input Switched-Capacitor Multilevel Inverter for High-Frequency AC Power Distribution. IEEE Trans. Power Electron. 2018, 33, 5937–5948. [Google Scholar] [CrossRef]
- Tayyab, M.; Sarwar, A.; Tariq, M.; Chakrabortty, R.K.; Ryan, M.J. Hardware-in-the-Loop Implementation of Projectile Target Search Algorithm for Selective Harmonic Elimination in a 3-Phase Multilevel Converter. IEEE Access 2020, 9, 30626–30635. [Google Scholar] [CrossRef]
- Siddique, M.D.; Mekhilef, S.; Shah, N.M.; Sarwar, A.; Iqbal, A.; Tayyab, M.; Ansari, M.K. Low Switching Frequency Based Asymmetrical Multilevel Inverter Topology with Reduced Switch Count. IEEE Access 2019, 7, 86374–86383. [Google Scholar] [CrossRef]
- Hussan, R.; Sarwar, A.; Khan, I.; Tariq, M.; Tayyab, M.; Alhosaini, W. An Eleven-Level Switched-Capacitor Inverter with Boosting Capability. Electronics 2021, 10, 2262. [Google Scholar] [CrossRef]
- Fong, Y.C.; Raman, S.R.; Ye, Y.; Cheng, K.W.E. Generalized Topology of a Hybrid Switched- Capacitor Multilevel Inverter for High- Frequency AC Power Distribution. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 2886–2897. [Google Scholar] [CrossRef]
- Zamiri, E.; Vosoughi, N.; Hosseini, S.H.; Barzegarkhoo, R.; Sabahi, M. A New Cascaded Switched-Capacitor Multilevel Inverter Based on Improved Series–Parallel Conversion with Less Number of Components. IEEE Trans. Ind. Electron. 2016, 63, 3582–3594. [Google Scholar] [CrossRef]
- Tayyab, M.; Sarwar, A.; Khan, I.; Tariq, M.; Hussan, R.; Murshid, S.; Alhosaini, W. A Single Source Switched-Capacitor 13-Level Inverter with Triple Voltage Boosting and Reduced Component Count. Electronics 2021, 10, 2321. [Google Scholar] [CrossRef]
- Hussan, M.R.; Sarwar, A.; Siddique, M.D.; Mekhilef, S.; Ahmad, S.; Sharaf, M.; Zaindin, M.; Firdausi, M. A novel switched-capacitor multilevel inverter topology for energy storage and smart grid applications. Electronics 2020, 9, 1703. [Google Scholar] [CrossRef]
- Taheri, A.; Rasulkhani, A.; Ren, H.-P. An Asymmetric Switched Capacitor Multilevel Inverter with Component Reduction. IEEE Access 2019, 7, 127166–127176. [Google Scholar] [CrossRef]
- Talooki, M.F.; Rezanejad, M.; Khosravi, R.; Samadaei, E. A Novel High Step-Up Switched-Capacitor Multilevel Inverter with Self-Voltage Balancing. IEEE Trans. Power Electron. 2021, 36, 4352–4359. [Google Scholar] [CrossRef]
- Ye, Y.; Cheng, E.K.W.; Liu, J.; Ding, K. A Step-Up Switched-Capacitor Multilevel Inverter with Self-Voltage Balancing. IEEE Trans. Ind. Electron. 2014, 61, 6672–6680. [Google Scholar] [CrossRef]
- Sandeep, N.; Yaragatti, U.R. A Switched-Capacitor-Based Multilevel Inverter Topology with Reduced Components. IEEE Trans. Power Electron. 2018, 33, 5538–5542. [Google Scholar] [CrossRef]
- Ahmad, A.; Anas, M.; Sarwar, A.; Zaid, M.; Tariq, M.; Ahmad, J.; Beig, A.R. Realization of a Generalized Switched-Capacitor Multilevel Inverter Topology with Less Switch Requirement. Energies 2020, 13, 1556. [Google Scholar] [CrossRef] [Green Version]
- Sathik, M.J.; Vijayakumar, K.; Member, S. Compact Switched Capacitor Multilevel Inverter (CSCMLI) With Self Voltage Balancing and Boosting Ability. IEEE Trans. Power Electron. 2018, 34, 4009–4013. [Google Scholar]
- Tehrani, K.; Weber, M.; Rasoanarivo, I. Hybrid Power System Optimization for Microgrids. In Proceedings of the 2021 23rd European Conference on Power Electronics and Applications (EPE’21 ECCE Europe), Virtual Conference, Ghent, Belgium, 6–10 September 2021; pp. 1–9. [Google Scholar]
- Biswas, M.; Podder, S.; Khan, Z.R. Modified H-bridge multilevel inverter for Photovoltaic micro-grid systems. In Proceedings of the 2016 9th International Conference on Electrical and Computer Engineering (ICECE), Dhaka, Bangladesh, 20–22 December 2016; pp. 377–380. [Google Scholar]
- Alawieh, H.; Riachy, L.; Tehrani, K.A.; Azzouz, Y.; Dakyo, B. A new dead-time effect elimination method for H-bridge inverters. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 24–27 October 2016; pp. 3153–3159. [Google Scholar]
- Abualigah, L.; Yousri, D.; Elaziz, M.A.; Ewees, A.A.; Al-Qaness, M.A.; Gandomi, A.H. Aquila Optimizer: A novel meta-heuristic optimization algorithm. Comput. Ind. Eng. 2021, 157, 107250. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inverter Type | DC Source | Capacitor | Clamped Diode | Active Switches | Total Parts Count | Complexity of Control |
|---|---|---|---|---|---|---|
| CHB symmetrical | 3 | 0 | 0 | 12 | 15 | Low |
| CHB asymmetrical | 2 | 0 | 0 | 8 | 10 | Low |
| NPC with voltage control | 1 | 6 | 10 | 12 | 29 | Very high |
| NPC without Voltage control | 6 | 0 | 10 | 12 | 28 | Low |
| FC | 1 | 5 | 0 | 12 | 18 | High |
| Modified H bridge | 2 | 0 | 0 | 6 | 8 | Very low |
| Switching States/Modes | S1 | S2 | S3 | S4 | S5 | S6 | Series Adding | Series Opposing |
|---|---|---|---|---|---|---|---|---|
| Output | Output | |||||||
| I | ON | - | ON | - | ON | - | 0 | 0 |
| II | ON | ON | - | - | ON | - | −(V2) = −E | (V2) = E |
| III | ON | - | ON | - | - | ON | (V1 + V2) = 3E | (V1 − V2) = 2E |
| IV | ON | ON | - | - | - | ON | (V1) = 2E | (V1) = 3E |
| V | - | ON | - | ON | - | ON | 0 | 0 |
| VI | - | - | ON | ON | - | ON | (V2) = E | −(V2) = −E |
| VII | - | ON | - | ON | ON | - | −(V1 + V2) = −3E | −(V1-V2) = −2E |
| VIII | - | - | ON | ON | ON | - | −(V1) = −2E | −(V1) = −3E |
| Sl. No. | Genetic Algorithm | Differential Evolution | Aquila Optimizer |
|---|---|---|---|
| 1 | Population = 40 | Population = 40 | Population = 40 |
| 2 | Mutation Rate = 0.01 | Mutant Factor = 0.01 | Alpha = 0.1, delta = 0.1, omega = 0.005 |
| 3 | Crossover Rate = 0.6 | Crossover Rate = 0.6 | U = 0.0265, r0 = 10 |
| S. No. | Parameters/Components | Specifications | No. of Components |
|---|---|---|---|
| 1. | Voltage Source (DC) | 60 V, 120 V | Two |
| 2. | Reference signal frequency | 50 Hz | One |
| 3. | Insulated-Gate Bipolar Transistor (IGBT) | Resistance (Internal) = 110−3 Ω Resistance (Snubber) = 110−5 Ω Capacitance (Snubber) Cs = 0 | Six |
| 4. | Load | R = 50 Ω, 100 Ω, L = 100 mH | One |
| S. No. | Components/Parameters | Specifications | No. of Components |
|---|---|---|---|
| 1. | Insulated-Gate Bipolar Transistor (IGBT) | FGA25N120 | 6 |
| 2. | IGBTs Driver circuit | TLP 250 H, ±12 V, 1 A | 6 |
| 3. | DSP Board | TMS320F28335 (Texas Instruments) | 1 |
| 4. | Power Supply | 60 V, 120 V | 2 |
| 5. | Load | 50 Ω, 100 Ω, L = 100 mH | 1 |
| 6. | Frequency (Fundamental) | 50 Hz | _ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hussan, M.R.; Sarwar, M.I.; Sarwar, A.; Tariq, M.; Ahmad, S.; Shah Noor Mohamed, A.; Khan, I.A.; Ali Khan, M.M. Aquila Optimization Based Harmonic Elimination in a Modified H-Bridge Inverter. Sustainability 2022, 14, 929. https://doi.org/10.3390/su14020929
Hussan MR, Sarwar MI, Sarwar A, Tariq M, Ahmad S, Shah Noor Mohamed A, Khan IA, Ali Khan MM. Aquila Optimization Based Harmonic Elimination in a Modified H-Bridge Inverter. Sustainability. 2022; 14(2):929. https://doi.org/10.3390/su14020929
Chicago/Turabian StyleHussan, Md Reyaz, Mohammad Irfan Sarwar, Adil Sarwar, Mohd Tariq, Shafiq Ahmad, Adamali Shah Noor Mohamed, Irfan A. Khan, and Mohammad Muktafi Ali Khan. 2022. "Aquila Optimization Based Harmonic Elimination in a Modified H-Bridge Inverter" Sustainability 14, no. 2: 929. https://doi.org/10.3390/su14020929
APA StyleHussan, M. R., Sarwar, M. I., Sarwar, A., Tariq, M., Ahmad, S., Shah Noor Mohamed, A., Khan, I. A., & Ali Khan, M. M. (2022). Aquila Optimization Based Harmonic Elimination in a Modified H-Bridge Inverter. Sustainability, 14(2), 929. https://doi.org/10.3390/su14020929