
Effective Hybrid Soft Computing Approach for Optimum Design of Shallow Foundations




Abstract
:1. Introduction
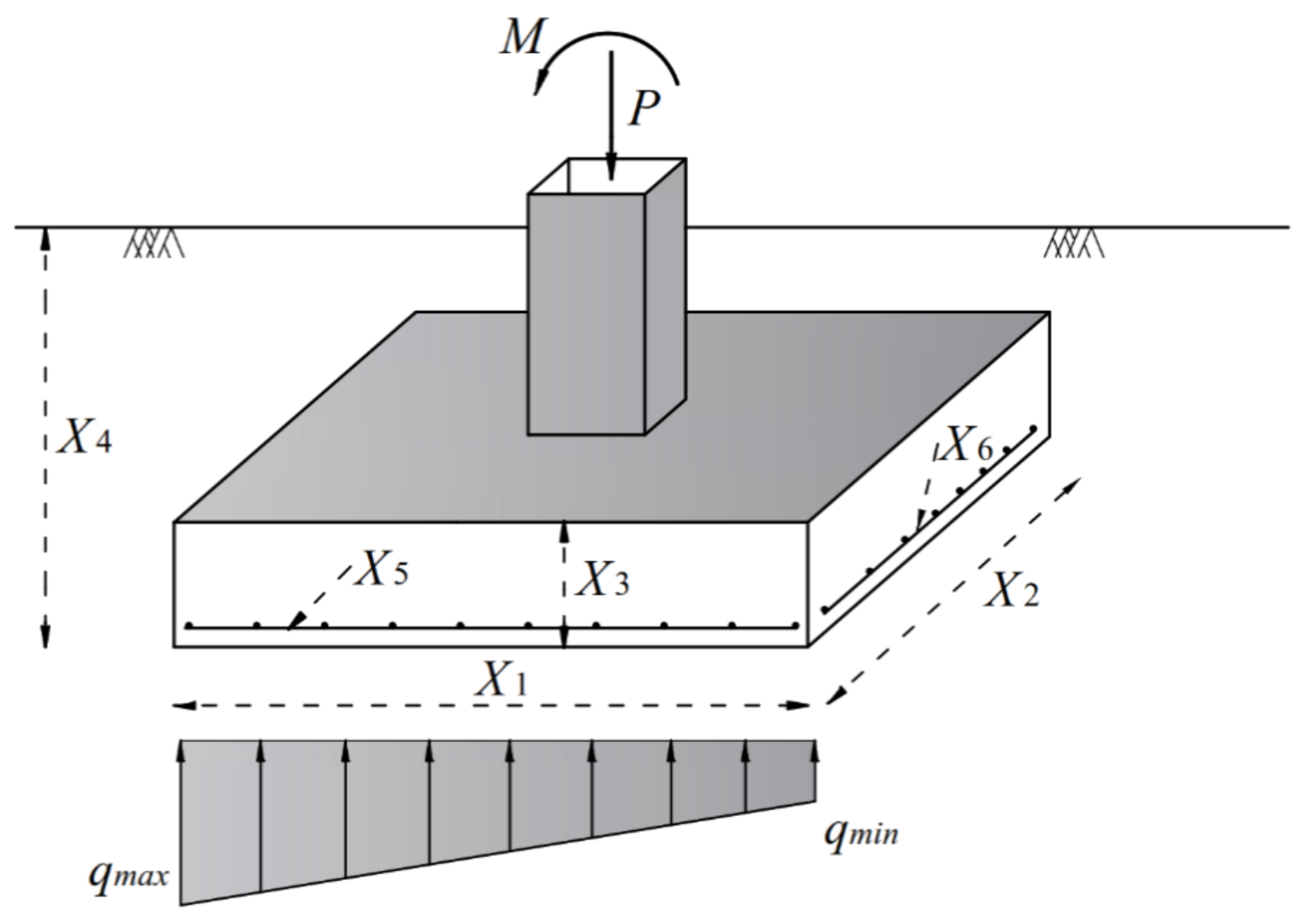
2. Foundation Optimization
subject to
gi(X) ≤ 0, I = 1, 2, …, p,
hj(X) = 0, j = 1, 2, …, m,
XL ≤ X ≤ XU
2.1. Objective Function
2.2. Design Variables
2.3. Design Constraints
3. Modified Rat Swarm Optimizer
| Algorithm 1 Modified Rat Swarm Optimization. |
| Define algorithm parameters: N, For i =1 to N //generate initial population Initialize the rats’ position, , using Equation (17) Evaluate opposite of rats’ position, , based on Equation (23) If f () < f (xi) Replace with End if End for Initialize parameters A, C, and R //algorithm process Calculate the fitness value of each search agent ←best search agent While t < //rats’ movement For i =1 to N Update parameters A and C by Equations (20) and (21) Update the positions of search agents using Equation (18) Calculate the fitness value of each search agent If the search agent goes beyond the boundary limits adjust it End for Change the worst agent with a new one using Equation (24) Update best agent t = t + 1 End While |
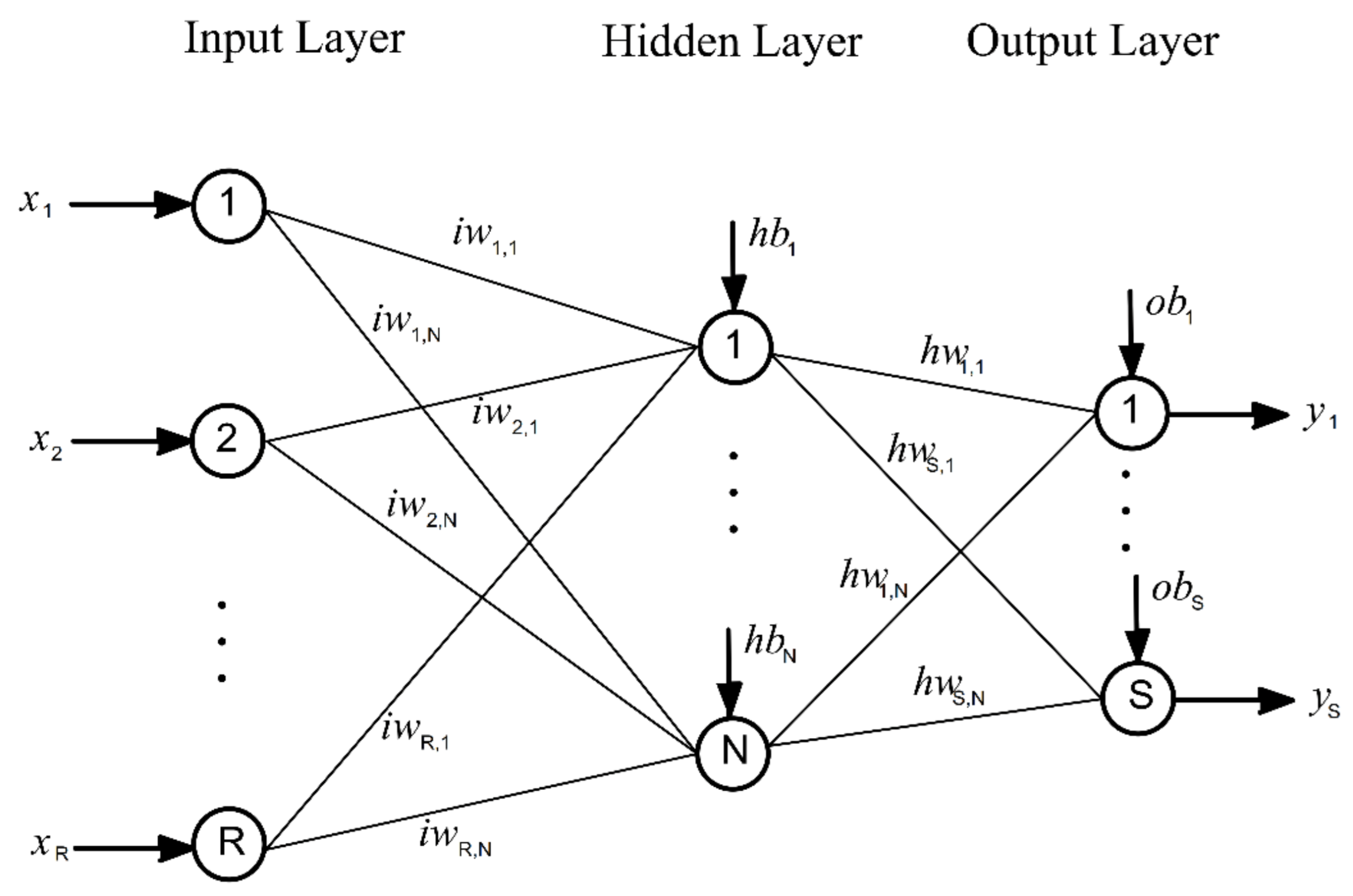
4. Artificial Neural Network
5. Performance Verification of MRSO
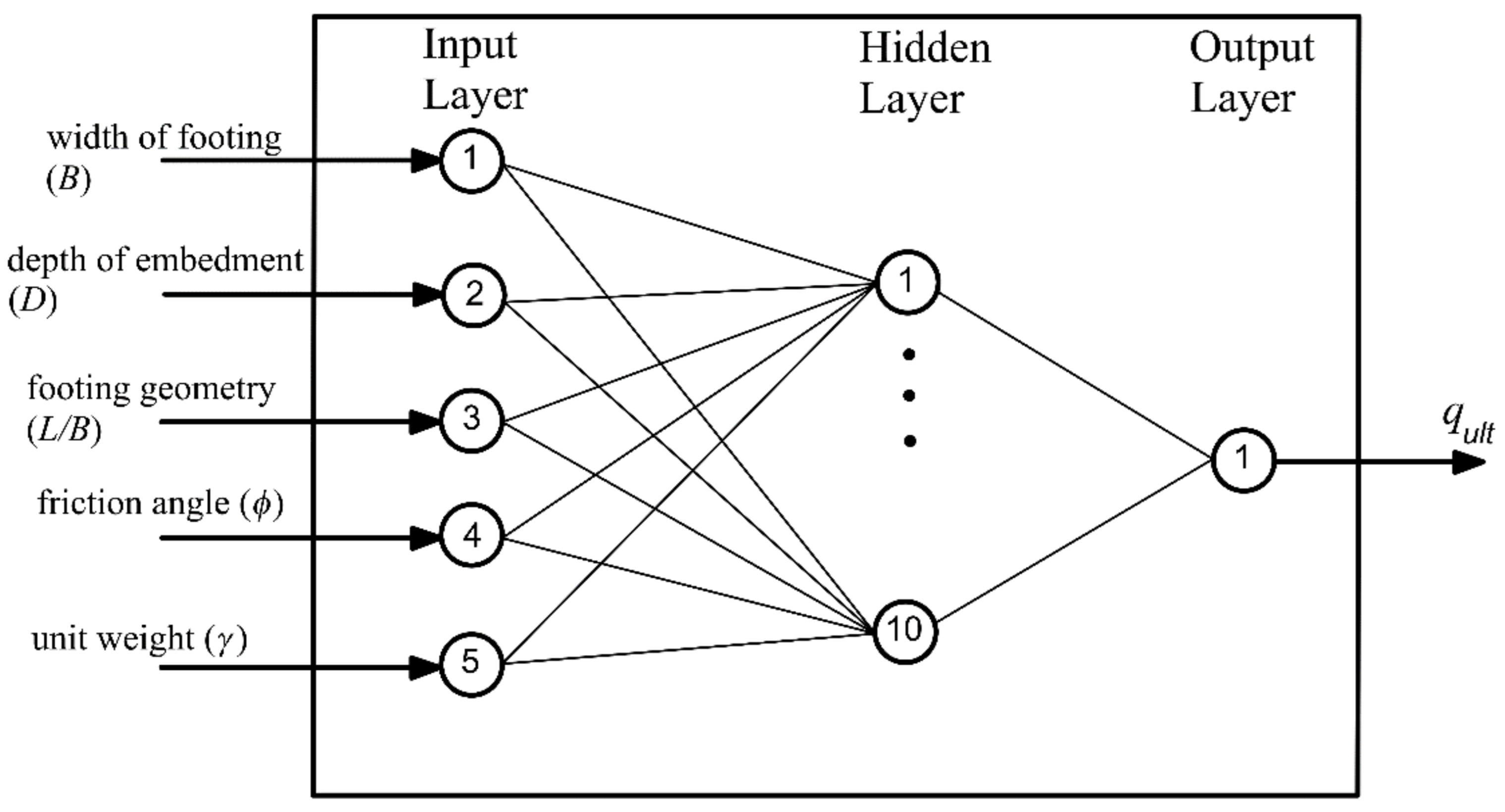
6. ANN for Prediction of Factor of Safety
7. Model Application
8. Summary and Conclusions
- The performance comparison of the proposed MRSO algorithm on a set of benchmark functions reveals that the MRSO outperforms the standard RSO and other algorithms.
- The most optimal network for qult estimation is a three-layer neural network with 10 neurons in the hidden layer.
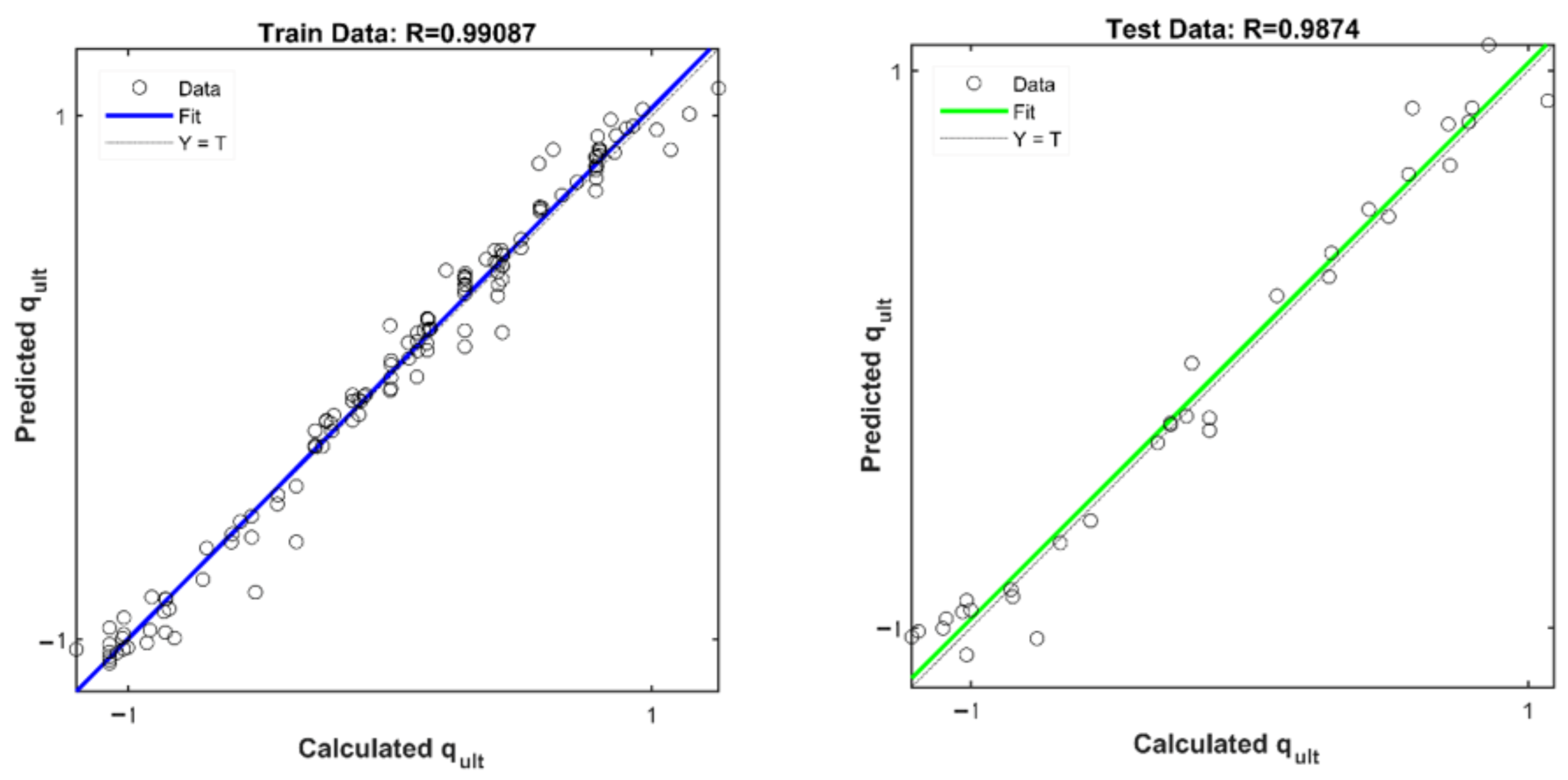
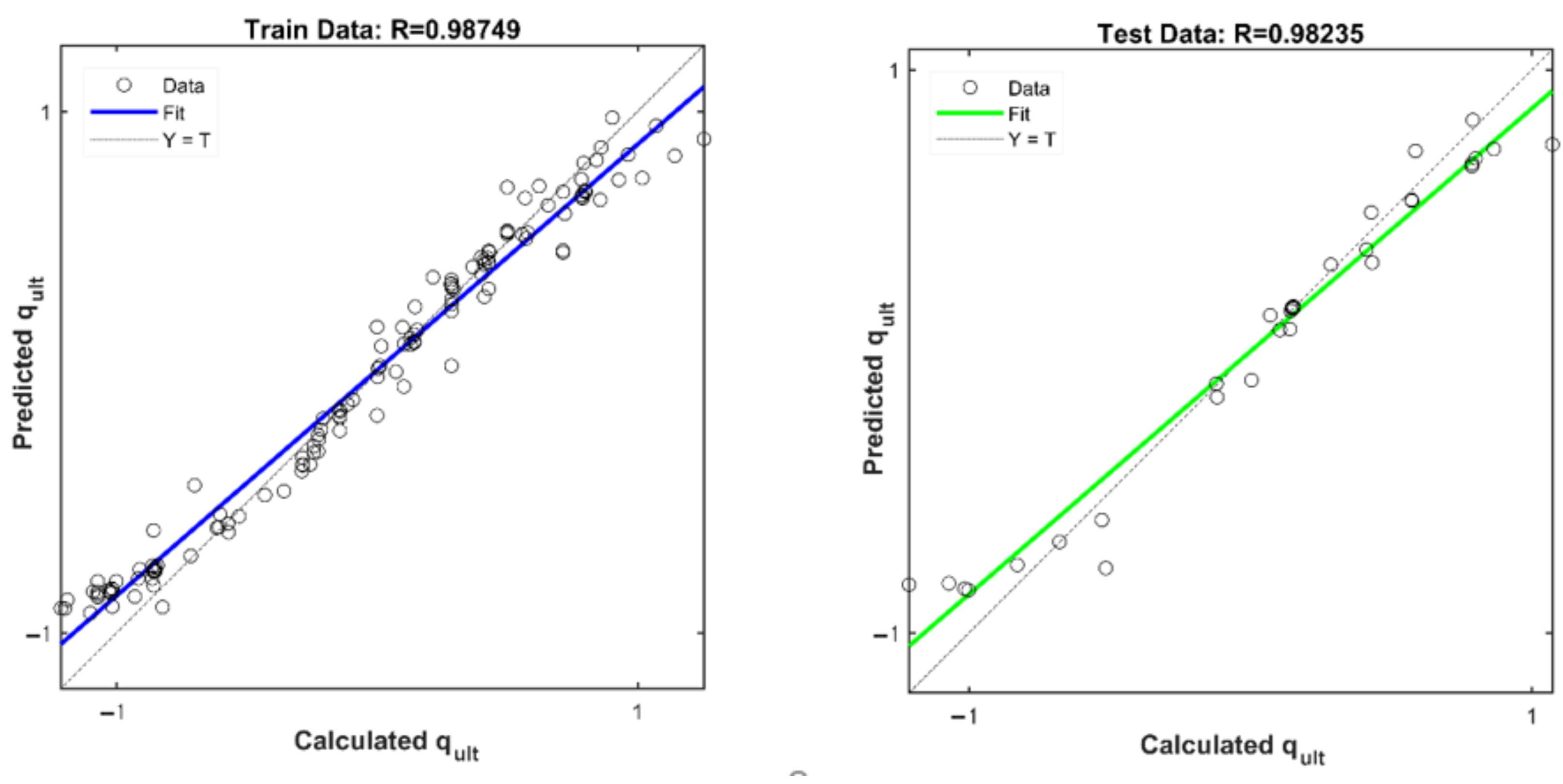
- The developed ANN model can be applied for ultimate bearing capacity estimation with RMSE equal to 0.0249 and a correlation coefficient equal to 0.9908.
- The new MRSO algorithm was successfully applied to a case study of spread footing optimization from the literature.
- According to the numerical experiment, the MRSO algorithm outperforms the other methods and may provide a cheaper design for spread foundations.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sources | B (m) | D (m) | L/B | γ(kN/m3) | ϕ (deg) | qult (kPa) |
|---|---|---|---|---|---|---|
| Muhs et al. [37] | 0.6 | 0.3 | 2 | 9.85 | 34.9 | 270 |
| 0.6 | 0 | 2 | 10.2 | 37.7 | 200 | |
| 0.6 | 0.3 | 2 | 10.2 | 37.7 | 570 | |
| 0.6 | 0 | 2 | 10.85 | 44.8 | 860 | |
| 0.6 | 0.3 | 2 | 10.85 | 44.8 | 1760 | |
| Weiß [38] | 0.5 | 0 | 1 | 10.2 | 37.7 | 154 |
| 0.5 | 0 | 1 | 10.2 | 37.7 | 165 | |
| 0.5 | 0 | 2 | 10.2 | 37.7 | 203 | |
| 0.5 | 0 | 2 | 10.2 | 37.7 | 195 | |
| 0.5 | 0 | 3 | 10.2 | 37.7 | 214 | |
| 0.52 | 0 | 3.85 | 10.2 | 37.7 | 186 | |
| 0.5 | 0.3 | 1 | 10.2 | 37.7 | 681 | |
| 0.5 | 0.3 | 2 | 10.2 | 37.7 | 542 | |
| 0.5 | 0.3 | 2 | 10.2 | 37.7 | 530 | |
| 0.5 | 0.3 | 3 | 10.2 | 37.7 | 402 | |
| 0.52 | 0.3 | 3.85 | 10.2 | 37.7 | 413 | |
| Muhs and Weiß [39] | 0.5 | 0 | 1 | 11.7 | 37 | 111 |
| 0.5 | 0 | 1 | 11.7 | 37 | 132 | |
| 0.5 | 0 | 2 | 11.7 | 37 | 143 | |
| 0.5 | 0.013 | 1 | 11.7 | 37 | 137 | |
| 0.5 | 0.029 | 4 | 11.7 | 37 | 109 | |
| 0.5 | 0.127 | 4 | 11.7 | 37 | 187 | |
| 0.5 | 0.3 | 1 | 11.7 | 37 | 406 | |
| 0.5 | 0.3 | 1 | 11.7 | 37 | 446 | |
| 0.5 | 0.3 | 4 | 11.7 | 37 | 322 | |
| 0.5 | 0.5 | 2 | 11.7 | 37 | 565 | |
| 0.5 | 0.5 | 4 | 11.7 | 37 | 425 | |
| 0.5 | 0 | 1 | 12.41 | 44 | 782 | |
| 0.5 | 0 | 4 | 12.41 | 44 | 797 | |
| 0.5 | 0.3 | 1 | 12.41 | 44 | 1940 | |
| 0.5 | 0.3 | 1 | 12.41 | 44 | 2266 | |
| 0.5 | 0.5 | 2 | 12.41 | 44 | 2847 | |
| 0.5 | 0.5 | 4 | 12.41 | 44 | 2033 | |
| 0.5 | 0.49 | 4 | 12.27 | 42 | 1492 | |
| 0.5 | 0 | 1 | 11.77 | 37 | 123 | |
| 0.5 | 0 | 2 | 11.77 | 37 | 134 | |
| 0.5 | 0.3 | 1 | 11.77 | 37 | 370 | |
| 0.5 | 0.5 | 2 | 11.77 | 37 | 464 | |
| 0.5 | 0 | 4 | 12 | 40 | 461 | |
| 0.5 | 0.5 | 4 | 12 | 40 | 1140 | |
| Muhs and Weiß [40] | 1 | 0.2 | 3 | 11.97 | 39 | 710 |
| 1 | 0 | 3 | 11.93 | 40 | 630 | |
| Briaud and Gibben[41] | 0.991 | 0.711 | 1 | 15.8 | 32 | 1773.7 |
| 3.004 | 0.762 | 1 | 15.8 | 32 | 1019.4 | |
| 2.489 | 0.762 | 1 | 15.8 | 32 | 1158 | |
| 1.492 | 0.762 | 1 | 15.8 | 32 | 1540 | |
| 3.016 | 0.889 | 1 | 15.8 | 32 | 1161.2 | |
| Gandhi [42] | 0.0585 | 0.029 | 5.95 | 15.7 | 34 | 58.5 |
| 0.0585 | 0.058 | 5.95 | 15.7 | 34 | 70.91 | |
| 0.0585 | 0.029 | 5.95 | 16.1 | 37 | 82.5 | |
| 0.0585 | 0.058 | 5.95 | 16.1 | 37 | 98.93 | |
| 0.0585 | 0.029 | 5.95 | 16.5 | 39.5 | 121.5 | |
| 0.0585 | 0.058 | 5.95 | 16.5 | 39.5 | 142.9 | |
| 0.0585 | 0.029 | 5.95 | 16.8 | 41.5 | 157.5 | |
| 0.0585 | 0.058 | 5.95 | 16.8 | 41.5 | 184.9 | |
| 0.0585 | 0.029 | 5.95 | 17.1 | 42.5 | 180.5 | |
| 0.0585 | 0.058 | 5.95 | 17.1 | 42.5 | 211 | |
| 0.094 | 0.047 | 6 | 15.7 | 34 | 74.7 | |
| 0.094 | 0.094 | 6 | 15.7 | 34 | 91.5 | |
| 0.094 | 0.047 | 6 | 16.1 | 37 | 104.8 | |
| 0.094 | 0.094 | 6 | 16.1 | 37 | 127.5 | |
| 0.094 | 0.047 | 6 | 16.5 | 39.5 | 155.8 | |
| 0.094 | 0.094 | 6 | 16.5 | 39.5 | 185.6 | |
| 0.094 | 0.047 | 6 | 16.8 | 41.5 | 206.8 | |
| 0.094 | 0.094 | 6 | 16.8 | 41.5 | 244.6 | |
| 0.094 | 0.047 | 6 | 17.1 | 42.5 | 235.6 | |
| 0.094 | 0.094 | 6 | 17.1 | 42.5 | 279.6 | |
| 0.152 | 0.075 | 5.95 | 15.7 | 34 | 98.2 | |
| 0.152 | 0.15 | 5.95 | 15.7 | 34 | 122.3 | |
| 0.152 | 0.075 | 5.95 | 16.1 | 37 | 143.3 | |
| 0.152 | 0.15 | 5.95 | 16.1 | 37 | 176.4 | |
| 0.152 | 0.075 | 5.95 | 16.5 | 39.5 | 211.2 | |
| 0.152 | 0.15 | 5.95 | 16.5 | 39.5 | 254.5 | |
| 0.152 | 0.075 | 5.95 | 16.8 | 41.5 | 285.3 | |
| 0.152 | 0.15 | 5.95 | 16.8 | 41.5 | 342.5 | |
| 0.152 | 0.075 | 5.95 | 17.1 | 42.5 | 335.3 | |
| 0.152 | 0.15 | 5.95 | 17.1 | 42.5 | 400.6 | |
| 0.094 | 0.047 | 1 | 15.7 | 34 | 67.7 | |
| 0.094 | 0.094 | 1 | 15.7 | 34 | 90.5 | |
| 0.094 | 0.047 | 1 | 16.1 | 37 | 98.8 | |
| 0.094 | 0.094 | 1 | 16.1 | 37 | 131.5 | |
| 0.094 | 0.047 | 1 | 16.5 | 39.5 | 147.8 | |
| 0.094 | 0.094 | 1 | 16.5 | 39.5 | 191.6 | |
| 0.094 | 0.047 | 1 | 16.8 | 41.5 | 196.8 | |
| 0.094 | 0.094 | 1 | 16.8 | 41.5 | 253.6 | |
| 0.094 | 0.047 | 1 | 17.1 | 42.5 | 228.8 | |
| 0.094 | 0.094 | 1 | 17.1 | 42.5 | 295.6 | |
| 0.152 | 0.075 | 1 | 15.7 | 34 | 91.2 | |
| 0.152 | 0.15 | 1 | 15.7 | 34 | 124.4 | |
| 0.152 | 0.075 | 1 | 16.1 | 37 | 135.2 | |
| 0.152 | 0.15 | 1 | 16.1 | 37 | 182.4 | |
| 0.152 | 0.075 | 1 | 16.5 | 39.5 | 201.2 | |
| 0.152 | 0.15 | 1 | 16.5 | 39.5 | 264.5 | |
| 0.152 | 0.075 | 1 | 16.8 | 41.5 | 276.3 | |
| 0.152 | 0.15 | 1 | 16.8 | 41.5 | 361.5 | |
| 0.152 | 0.075 | 1 | 17.1 | 42.5 | 325.3 | |
| 0.152 | 0.15 | 1 | 17.1 | 42.5 | 423.6 |
References
- Kaveh, A.; Seddighian, M.R. Optimization of Slope Critical Surfaces Considering Seepage and Seismic Effects Using Finite Element Method and Five Meta-Heuristic Algorithms. Period. Polytech. Civ. Eng. 2021, 65, 425–436. [Google Scholar] [CrossRef]
- Chan, C.M.; Zhang, L.; Ng, J.T. Optimization of pile groups using hybrid genetic algorithms. J. Geotech. Geoenviron. Eng. 2009, 135, 497–505. [Google Scholar] [CrossRef]
- Gandomi, A.H.; Kashani, A.R. Construction cost minimization of shallow foundation using recent swarm intelligence techniques. IEEE Trans. Ind. Inform. 2017, 14, 1099–1106. [Google Scholar] [CrossRef]
- Das, B.M. Principles of Foundation Engineering; Cengage Learning: Boston, MA, USA, 2015. [Google Scholar]
- Taylor, R.E. Geotechnical Centrifuge Technology; CRC Press: London, UK, 2018. [Google Scholar]
- Ahmad, M.; Ahmad, F.; Wróblewski, P.; Al-Mansob, R.A.; Olczak, P.; Kamiński, P.; Safdar, M.; Rai, P. Prediction of Ultimate Bearing Capacity of Shallow Foundations on Cohesionless Soils: A Gaussian Process Regression Approach. Appl. Sci. 2021, 11, 10317. [Google Scholar] [CrossRef]
- Moayedi, H.; Moatamediyan, A.; Nguyen, H.; Bui, X.-N.; Bui, D.T.; Rashid, A.S.A. Prediction of ultimate bearing capacity through various novel evolutionary and neural network models. Eng. Comput. 2020, 36, 671–687. [Google Scholar] [CrossRef]
- Ahmad, M.; Hu, J.-L.; Hadzima-Nyarko, M.; Ahmad, F.; Tang, X.-W.; Rahman, Z.U.; Nawaz, A.; Abrar, M. Rockburst Hazard Prediction in Underground Projects Using Two Intelligent Classification Techniques: A Comparative Study. Symmetry 2021, 13, 632. [Google Scholar] [CrossRef]
- Gao, W.; Raftari, M.; Rashid, A.S.A.; Mu’azu, M.A.; Jusoh, W.A.W. A predictive model based on an optimized ANN combined with ICA for predicting the stability of slopes. Eng. Comput. 2020, 36, 325–344. [Google Scholar] [CrossRef]
- Khajehzadeh, M.; Taha, M.R.; Keawsawasvong, S.; Mirzaei, H.; Jebeli, M. An Effective Artificial Intelligence Approach for Slope Stability Evaluation. IEEE Access 2022, 10, 5660–5671. [Google Scholar] [CrossRef]
- Abdalla, J.A.; Attom, M.F.; Hawileh, R. Prediction of minimum factor of safety against slope failure in clayey soils using artificial neural network. Environ. Earth Sci. 2015, 73, 5463–5477. [Google Scholar] [CrossRef]
- Ahmad, M.; Hu, J.-L.; Ahmad, F.; Tang, X.-W.; Amjad, M.; Iqbal, M.J.; Asim, M.; Farooq, A. Supervised Learning Methods for Modeling Concrete Compressive Strength Prediction at High Temperature. Materials 2021, 14, 1983. [Google Scholar] [CrossRef]
- Sonmez, H.; Gokceoglu, C.; Nefeslioglu, H.; Kayabasi, A. Estimation of rock modulus: For intact rocks with an artificial neural network and for rock masses with a new empirical equation. Int. J. Rock Mech. Min. Sci. 2006, 43, 224–235. [Google Scholar] [CrossRef]
- Choobbasti, A.; Farrokhzad, F.; Barari, A. Prediction of slope stability using artificial neural network (case study: Noabad, Mazandaran, Iran). Arab. J. Geosci. 2009, 2, 311–319. [Google Scholar] [CrossRef]
- Wang, H.; Moayedi, H.; Kok Foong, L. Genetic algorithm hybridized with multilayer perceptron to have an economical slope stability design. Eng. Comput. 2021, 37, 3067–3078. [Google Scholar] [CrossRef]
- Rukhaiyar, S.; Alam, M.; Samadhiya, N. A PSO-ANN hybrid model for predicting factor of safety of slope. Int. J. Geotech. Eng. 2018, 12, 556–566. [Google Scholar] [CrossRef]
- Koessler, E.; Almomani, A. Hybrid particle swarm optimization and pattern search algorithm. Optim. Eng. 2021, 22, 1539–1555. [Google Scholar] [CrossRef]
- Gao, W. Modified ant colony optimization with improved tour construction and pheromone updating strategies for traveling salesman problem. Soft Comput. 2021, 25, 3263–3289. [Google Scholar] [CrossRef]
- Delice, Y.; Aydoğan, E.K.; Özcan, U.; İlkay, M.S. A modified particle swarm optimization algorithm to mixed-model two-sided assembly line balancing. J. Intell. Manuf. 2017, 28, 23–36. [Google Scholar] [CrossRef]
- Kiran, S.H.; Dash, S.S.; Subramani, C. Performance of two modified optimization techniques for power system voltage stability problems. Alex. Eng. J. 2016, 55, 2525–2530. [Google Scholar] [CrossRef] [Green Version]
- Khajehzadeh, M.; Taha, M.R.; El-Shafie, A.; Eslami, M. Search for critical failure surface in slope stability analysis by gravitational search algorithm. Int. J. Phys. Sci. 2011, 6, 5012–5021. [Google Scholar]
- Khajehzadeh, M.; Taha, M.R.; Eslami, M. Multi-objective optimization of foundation using global-local gravitational search algorithm. Struct. Eng. Mech. Int. J. 2014, 50, 257–273. [Google Scholar] [CrossRef]
- Dhiman, G.; Garg, M.; Nagar, A.; Kumar, V.; Dehghani, M. A novel algorithm for global optimization: Rat swarm optimizer. J. Ambient. Intell. Humaniz. Comput. 2021, 12, 8457–8482. [Google Scholar] [CrossRef]
- Wang, Y.; Kulhawy, F.H. Economic design optimization of foundations. J. Geotech. Geoenviron. Eng. 2008, 134, 1097–1105. [Google Scholar] [CrossRef]
- Poulos, H.G.; Davis, E.H. Elastic Solutions for Soil and Rock Mechanics; Wiley: New York, NY, USA, 1974. [Google Scholar]
- ACI 318-05Building Code Requirements for Structural Concrete and Commentary; American Concrete Institute International: Farmington Hills, MI, USA, 2005.
- Anderson, J.A. An Introduction to Neural Networks; MIT Press: Cambridge, MA, USA, 1995. [Google Scholar]
- Baheer, I. Selection of methodology for modeling hysteresis behavior of soils using neural networks. Comput.-Aided Civ. Infrastruct. Eng. 2000, 5, 445–463. [Google Scholar] [CrossRef]
- Caudill, M. Neural networks primer, Part III. AI Expert 1988, 3, 53–59. [Google Scholar]
- Smith, G.N. Probability and Statistics in Civil Engineering; Collins Professional and Technical Books: London, UK, 1986. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Mirjalili, S. Moth-flame optimization algorithm: A novel nature-inspired heuristic paradigm. Knowl.-Based Syst. 2015, 89, 228–249. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Hatamlou, A. Multi-verse optimizer: A nature-inspired algorithm for global optimization. Neural Comput. Appl. 2016, 27, 495–513. [Google Scholar] [CrossRef]
- Sola, J.; Sevilla, J. Importance of input data normalization for the application of neural networks to complex industrial problems. IEEE Trans. Nucl. Sci. 1997, 44, 1464–1468. [Google Scholar] [CrossRef]
- Moayedi, H.; Abdullahi, M.a.M.; Nguyen, H.; Rashid, A.S.A. Comparison of dragonfly algorithm and Harris hawks optimization evolutionary data mining techniques for the assessment of bearing capacity of footings over two-layer foundation soils. Eng. Comput. 2021, 37, 437–447. [Google Scholar] [CrossRef]
- Khajehzadeh, M.; Taha, M.R.; El-Shafie, A.; Eslami, M. Modified particle swarm optimization for optimum design of spread footing and retaining wall. J. Zhejiang Univ. Sci. A 2011, 12, 415–427. [Google Scholar] [CrossRef]
- Muhs, H.; Elmiger, R.; Weiß, K. Sohlreibung und Grenztragfähigkeit Unter Lotrecht und Schräg Belasteten Einzelfundamenten; Deutsche Forschungsgesellschaft für Bodenmechanik (DEGEBO): Berlin, Germany, 1969. [Google Scholar]
- Weiß, K. Der Einfluß der Fundamentform auf die Grenztragfähigkeit Flachgegründeter Fundamente, Untersuchungen Ausgef von Klaus Weiß: Mit 14 Zahlentaf; Deutsche Forschungsgesellschaft für Bodenmechanik (DEGEBO): Berlin, Germany, 1970. [Google Scholar]
- Muhs, H.; Weiss, K. Untersuchung von Grenztragfähigkeit und Setzungsverhalten Flachgegründeter Einzelfundamente im Ungleichförmigennichtbindigen Boden; Deutsche Forschungsgesells chaft für Bodenmechanik (DEGEBO): Berlin, Germany, 1971. [Google Scholar]
- Muhs, H. Inclined load tests on shallow strip footings. In Proceedings of the 8th International Conference on Soil Mechanism and Foundation Engineering, Moscow, Russia, 6–11 August 1973; Volume II, pp. 173–179. [Google Scholar]
- Briaud, J.-L.; Gibbens, R. Behavior of five large spread footings in sand. J. Geotech. Geoenviron. Eng. 1999, 125, 787–796. [Google Scholar] [CrossRef]
- Gandhi, G. Study of Bearing Capacity Factors Developed from Lab. Experiments on Shallow Footings on Cohesionless Soils. Ph.D. Thesis, Shri GS Institute of Tech and Science, Indore, India, 2003. [Google Scholar]





| Item | Unit | Unit Cost (Euros) |
|---|---|---|
| Excavation | m3 | 25.16 |
| Formwork | m2 | 51.97 |
| Reinforcement | kg | 2.16 |
| Concrete | m3 | 173.96 |
| Compacted backfill | m3 | 3.97 |
| Function | Range | n (Dim) | 3D View | |
|---|---|---|---|---|
| 0 | 30 |  | ||
| 0 | 30 |  | ||
| 0 | 30 |  | ||
| 0 | 30 |  | ||
| 0 | 30 |  | ||
| 0 | 30 |  | ||
| 428.9829 × n | 30 |  | ||
| 0 | 30 |  | ||
| 0 | 30 |  | ||
| 0 | 30 |  | ||
| 0 | 30 |  | ||
| 0 | 30 |  |
| Function | Statistics | MRSO | RSO | PSO | MFO | MVO |
|---|---|---|---|---|---|---|
| F1 | Mean | 0.000 | 6.09 × 10−32 | 4.98 × 10−9 | 3.15 × 10−4 | 2.81 × 10−1 |
| Std. | 0.000 | 5.67 × 10−35 | 1.40 × 10−8 | 5.99 × 10−4 | 1.11 × 10−1 | |
| F2 | Mean | 0.000 | 0.000 | 7.29 × 10−4 | 3.71 × 10+1 | 3.96 × 10−1 |
| Std. | 0.000 | 0.000 | 1.84 × 10−3 | 2.16 × 10+1 | 1.41 × 10−1 | |
| F3 | Mean | 0.000 | 1.10 × 10−18 | 1.40 × 10 | 4.42 × 10+3 | 4.31 × 10 |
| Std. | 0.000 | 4.47 × 10−19 | 7.13 | 3.71 × 10+3 | 8.97 × 10 | |
| F4 | Mean | 0.000 | 4.67 × 10−7 | 6.00 × 10−1 | 6.70 × 10 | 8.80 × 10−1 |
| Std. | 0.000 | 1.96 × 10−8 | 1.72 × 10−1 | 1.06 × 10 | 2.50 × 10−1 | |
| F5 | Mean | 4.71 × 10−3 | 6.13 | 4.93 × 10 | 3.50 × 10+3 | 1.18 × 10+2 |
| Std. | 0.000 | 7.97 × 10−1 | 3.89 × 10 | 3.98 × 10+3 | 1.43 × 10+2 | |
| F6 | Mean | 6.32 × 10−7 | 9.49 × 10−6 | 6.92 × 10−2 | 3.22 × 10−1 | 2.02 × 10−2 |
| Std. | 4.75 × 10−7 | 1.83 × 10−5 | 2.87 × 10−2 | 2.93 × 10−1 | 7.43 × 10−3 | |
| F7 | Mean | −1.25 × 10+4 | −8.57 × 10+3 | −6.01 × 10+3 | −8.04 × 10+3 | −6.92 × 10+3 |
| Std. | 2.60 | 4.23 × 10+2 | 1.30 × 10+3 | 8.80 × 10+2 | 9.19 × 10+2 | |
| F8 | Mean | 0.000 | 1.57 × 10+2 | 4.72 × 10+1 | 1.63 × 10+2 | 1.01 × 10+2 |
| Std. | 0.000 | 7.39 × 10 | 1.03 × 10 | 3.74 × 10 | 1.89 × 10 | |
| F9 | Mean | 8.88 × 10−16 | 7.40 × 10−17 | 3.86 × 10−2 | 1.60 × 10 | 1.15 × 10 |
| Std. | 0.000 | 6.42 | 2.11 × 10−1 | 6.18 × 10 | 7.87 × 10−1 | |
| F10 | Mean | 0.000 | 0.000 | 5.50 × 10−3 | 5.03 × 10−2 | 5.74 × 10−1 |
| Std. | 0.000 | 0.000 | 7.39 × 10−3 | 1.74 × 10−1 | 1.12 × 10−1 | |
| F11 | Mean | 2.90 × 10−3 | 5.52 × 10−1 | 1.05 × 10−2 | 1.26 × 10 | 1.27 × 10 |
| Std. | 4.00 × 10−3 | 8.40 | 2.06 × 10−2 | 1.83 × 10 | 1.02 × 10 | |
| F12 | Mean | 2.15 × 10−2 | 6.05 × 10−2 | 4.03 × 10−1 | 7.24 × 10−1 | 6.60 × 10−1 |
| Std. | 3.72 × 10−2 | 7.43 × 10−1 | 5.39 × 10−1 | 1.48 × 10 | 4.33 × 10−2 |
| Neurons Number | Algorithm | RMSE | R |
|---|---|---|---|
| 1 | MRSO RSO | 0.152 0.348 | 0.8043 0.7539 |
| 2 | MRSO RSO | 0.135 0.248 | 0.8275 0.7902 |
| 3 | MRSO RSO | 0.106 0.181 | 0.8910 0.8386 |
| 4 | MRSO RSO | 0.087 0.142 | 0.9102 0.8779 |
| 5 | MRSO RSO | 0.069 0.105 | 0.9444 0.8991 |
| 6 | MRSO RSO | 0.056 0.095 | 0.9505 0.9272 |
| 7 | MRSO RSO | 0.044 0.078 | 0.9727 0.9403 |
| 8 | MRSO RSO | 0.034 0.060 | 0.9828 0.9764 |
| 9 | MRSO RSO | 0.0291 0.0414 | 0.9888 0.9795 |
| 10 | MRSO RSO | 0.0289 0.0342 | 0.9908 0.9875 |
| 11 | MRSO RSO | 0.0314 0.0408 | 0.9817 0.9786 |
| Parameter | Unit | Value for Example |
|---|---|---|
| Effective friction angle of base soil | degree | 30 |
| Unit weight of base soil | kN/m3 | 18 |
| Young’s modulus | MPa | 35 |
| Poisson’s ratio | − | 0.3 |
| Vertical load | kN | 3480 |
| Moment | kN m | 840 |
| Concrete cover | cm | 7.0 |
| Yield strength of reinforcing steel | MPa | 400 |
| Compressive strength of concrete | MPa | 30 |
| Factor of safety for bearing capacity | − | 3.0 |
| Allowable settlement of footing | m | 0.04 |
| Design Variable | Unit | Optimum Values MRSO (Current Study) | Optimum Values RSO (Current Study) | Optimum Values MPSO [36] |
|---|---|---|---|---|
| X1 | m | 5.30 | 5.75 | 5.75 |
| X2 | m | 1.90 | 1.82 | 1.70 |
| X3 | m | 0.503 | 0.505 | 0.67 |
| X4 | m | 1.90 | 1.82 | 1.70 |
| X5 | cm2 | 135 | 149.7 | 160 |
| X6 | cm2 | 25 | 23.1 | 23 |
| Objective function | Euros | 2756 | 2845 | 2926 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khajehzadeh, M.; Keawsawasvong, S.; Nehdi, M.L. Effective Hybrid Soft Computing Approach for Optimum Design of Shallow Foundations. Sustainability 2022, 14, 1847. https://doi.org/10.3390/su14031847
Khajehzadeh M, Keawsawasvong S, Nehdi ML. Effective Hybrid Soft Computing Approach for Optimum Design of Shallow Foundations. Sustainability. 2022; 14(3):1847. https://doi.org/10.3390/su14031847
Chicago/Turabian StyleKhajehzadeh, Mohammad, Suraparb Keawsawasvong, and Moncef L. Nehdi. 2022. "Effective Hybrid Soft Computing Approach for Optimum Design of Shallow Foundations" Sustainability 14, no. 3: 1847. https://doi.org/10.3390/su14031847
APA StyleKhajehzadeh, M., Keawsawasvong, S., & Nehdi, M. L. (2022). Effective Hybrid Soft Computing Approach for Optimum Design of Shallow Foundations. Sustainability, 14(3), 1847. https://doi.org/10.3390/su14031847