
A Bi-Objective Field-Visit Planning Problem for Rapid Needs Assessment under Travel-Time Uncertainty

Abstract
:1. Introduction
2. Related Literature
3. Problem Definition
3.1. Bi-Objective Lexicographic Maximin Approach to the SARP Model
- Vector x leximin-dominates y (written as ), if and only if , such that , = and >;
- x and y are indifferent (written as x y), if and only if = ;
- is the case where or x y.
- Let s and represent two solutions of the leximin–SARP. Solution s dominates solution iff and , and either or . Solution s is a Pareto-optimal solution iff no other solutions dominate s.
3.2. Robust Optimization Approach to Deal with Uncertainty
4. Solution Method
4.1. Multi-Directional Local Search
| Algorithm 1 High-level overview of the MDLS procedure proposed by Tricoire [23]. |
1: pre-condition: F is a non-dominated set 2: repeat 3: select a solution 4: 5: 6: 7: until timeLimit is reached 8: return F |
4.2. ALNS Operators
4.2.1. Total-Route-Duration Objective Operators
4.2.2. Leximin Objective Operators
- Random removal: q sites are selected randomly to be removed;
- Worst min removal: q sites with the lowest contribution to the solution’s minimum coverage ratio are selected to be removed.
- Highest max–min insertion: for this operator, we first insert the site with the highest contribution to the max–min value of the current solution;
- Highest Leximin insertion: this operator differs from the previous one in that we first insert the site with the highest contribution to the vector of coverage ratio (leximin objective) of the current solution.
5. Computational Results
5.1. Instance Description
5.2. Parameter Settings
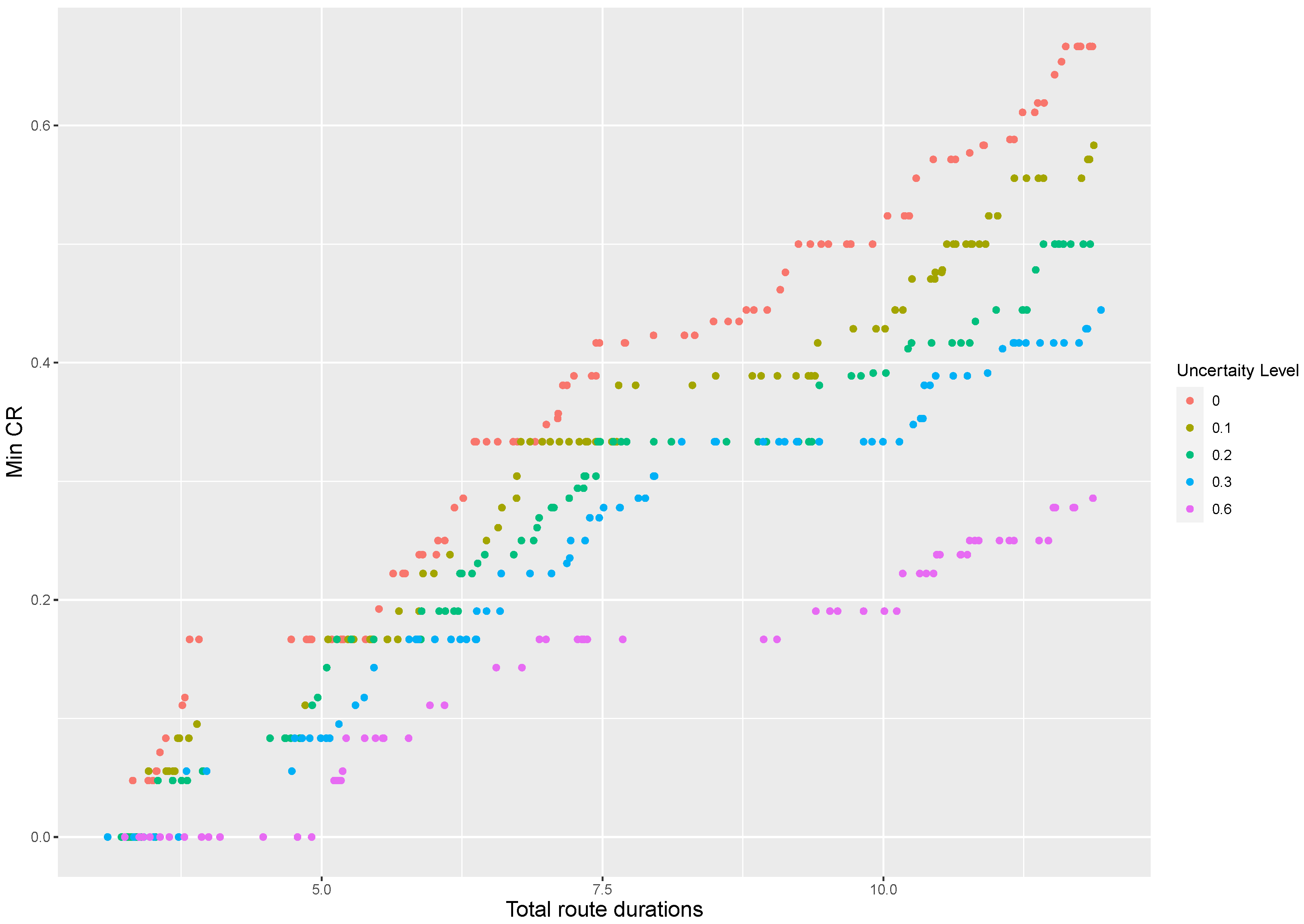
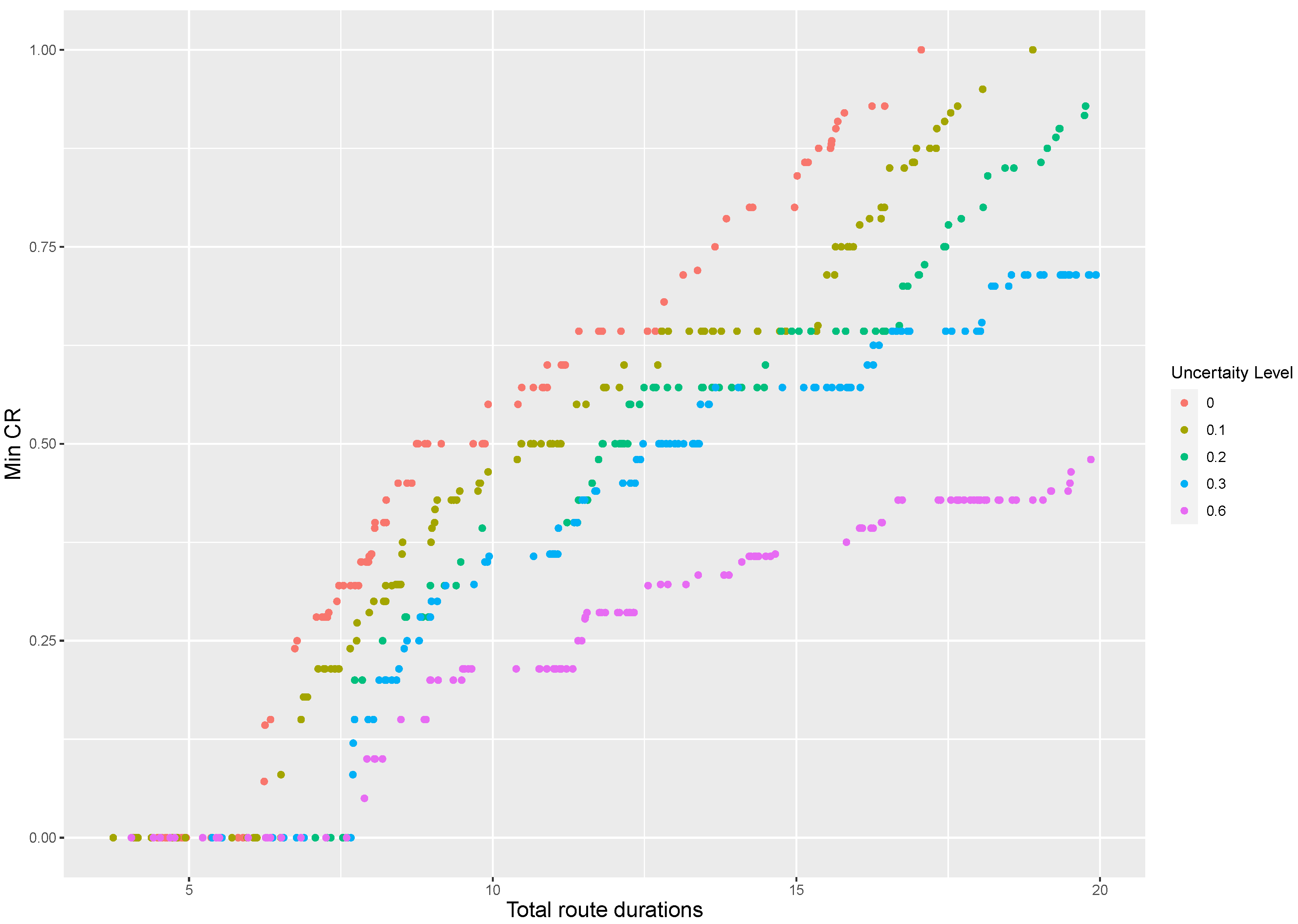
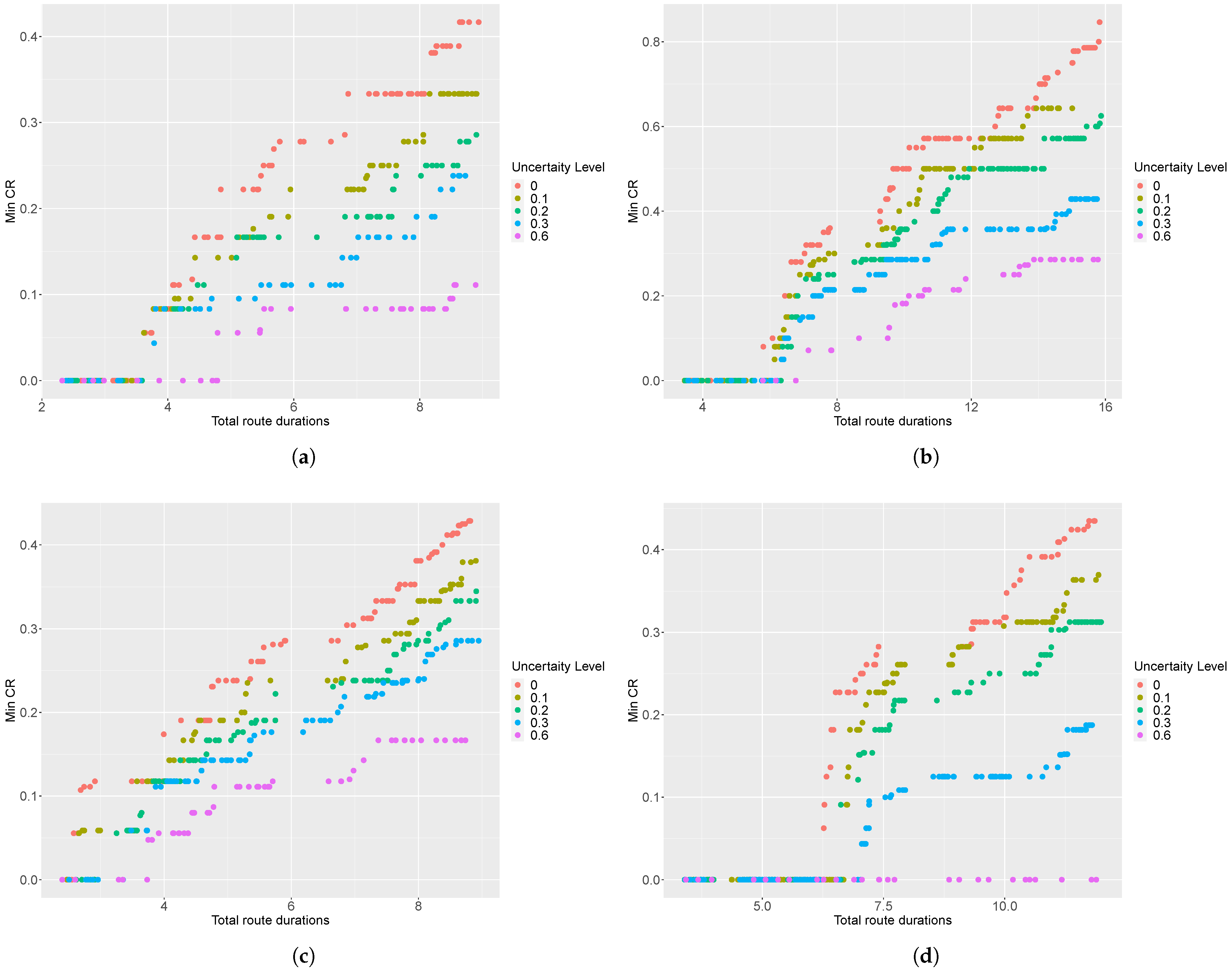
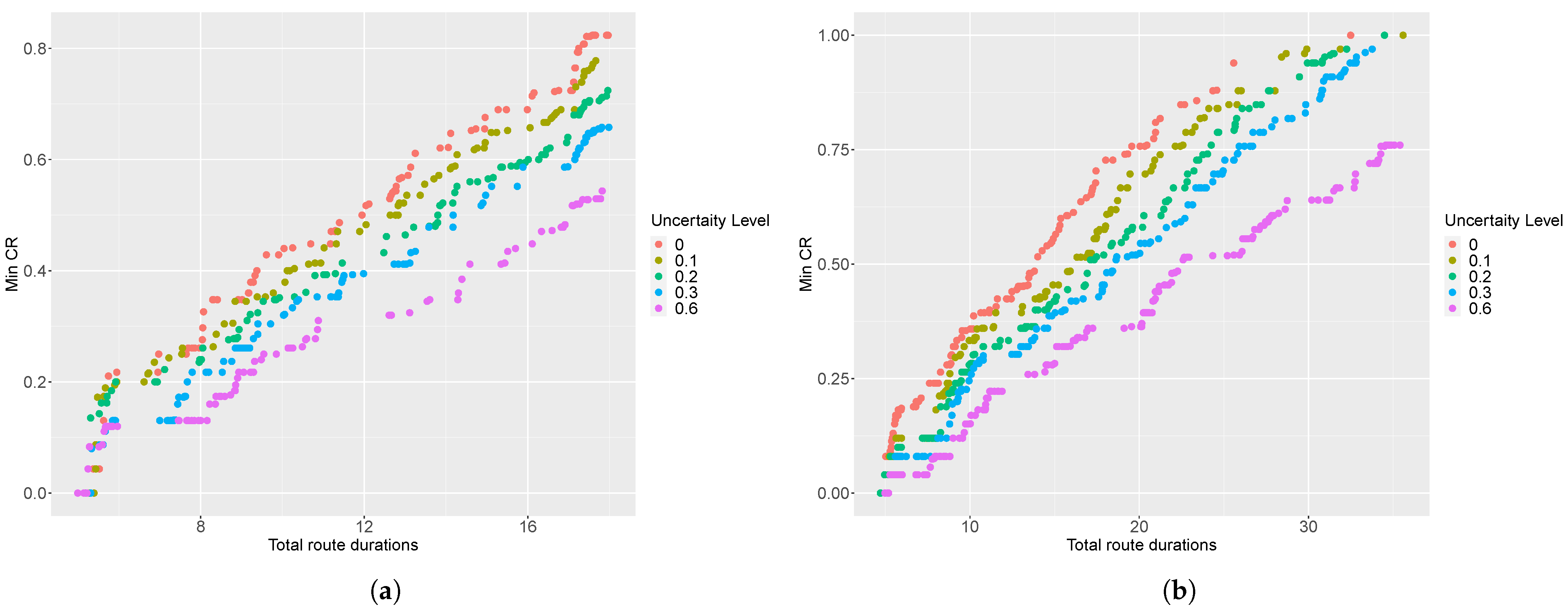
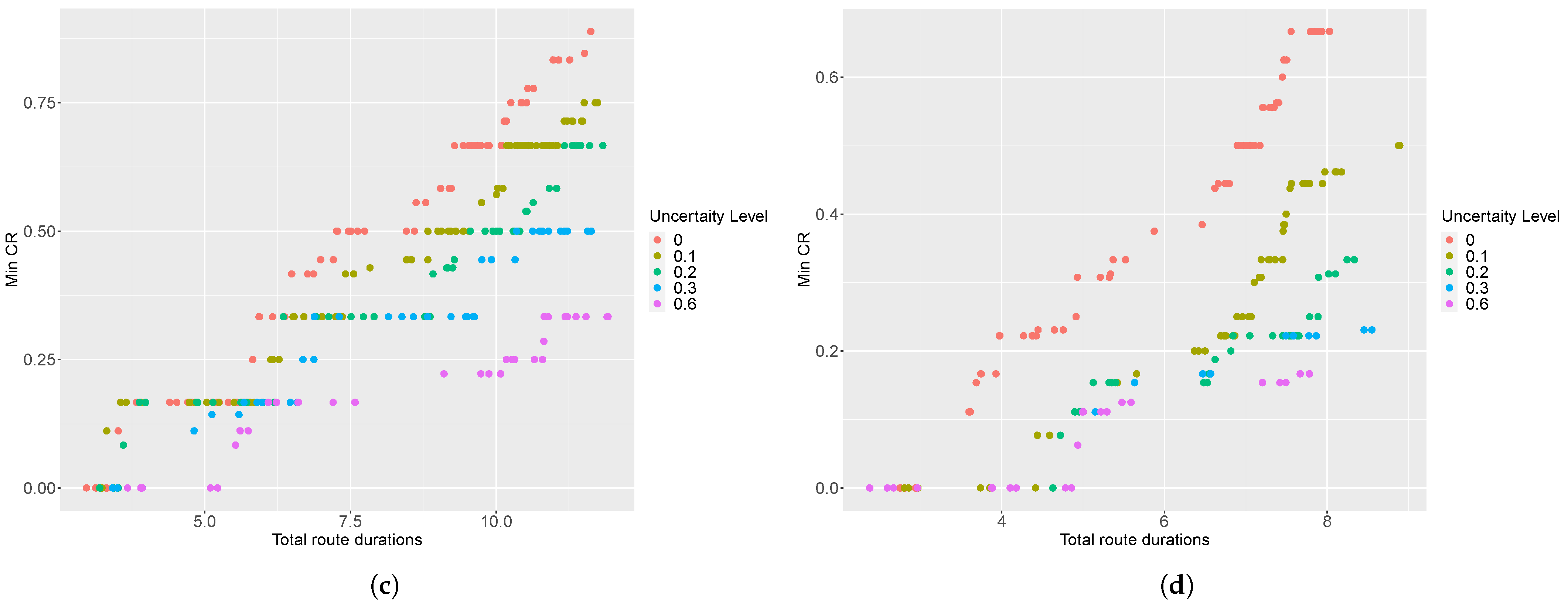
5.3. Pareto-Front Approximation at Different Levels of Uncertainty
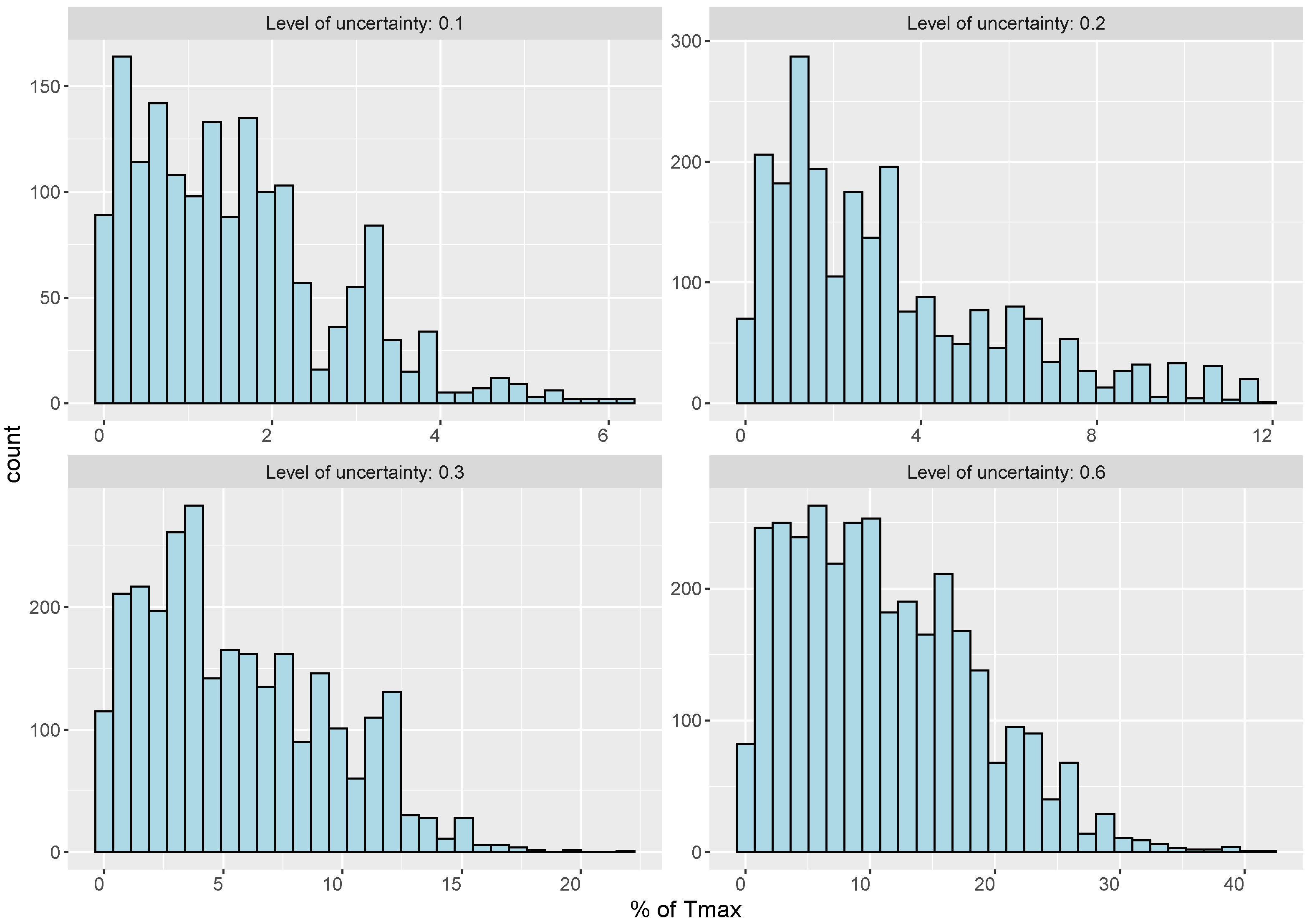
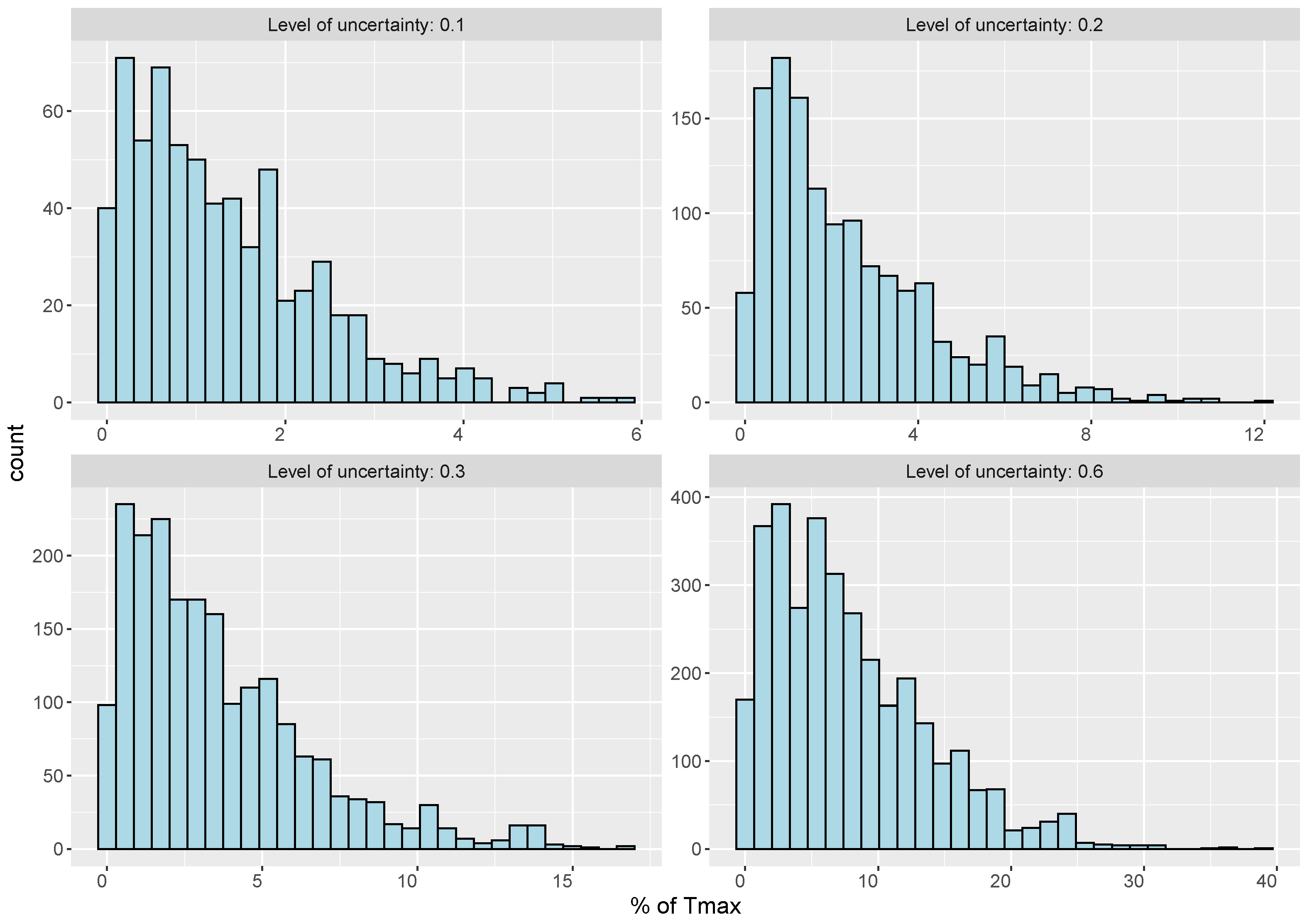
5.4. Trade-Off between Infeasibility and Solution Quality
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
- N = set of sites in the affected sites indexed by i, j∈
- = N∪ where is the depot
- K = set of assessment teams indexed by k∈K
- C = set of characteristics indexed by c∈C
- = takes the value 1 if node carries characteristic and 0 otherwise
- = total number of sites that carry characteristic
- = travel time between nodes i and j
- = total available time for each team
- = 1 if team k visits site j after site i and 0 otherwise
- = 1 if team k visits site i and 0 otherwise
- = sequence in which site i is visited
- Z = minimum expected coverage ratio
Appendix B



References
- PAHO. Humanitarian Supply Management and Logistics in the Health Sector; Pan American Health Organization: Washington, DC, USA, 2001. [Google Scholar]
- IFRC. Guidelines for Assessment in Emergencies, Geneva, Switzerland. 2008. Available online: https://www.icrc.org/en/doc/assets/files/publications/icrc-002-118009.pdf (accessed on 28 June 2020).
- ACAPS. Technical Brief: Purposive Sampling and Site Selection in Phase 2. 2011. Available online: https://www.humanitarianresponse.info/sites/www.humanitarianresponse.info/files/documents/files/Purposive_Sampling_Site_Selection_ACAPS.pdf (accessed on 28 June 2020).
- Arii, M. Rapid assessment in disasters. Jpn. Med. Assoc. J. 2013, 56, 19–24. [Google Scholar]
- Zissman, M.; Evans, J.; Holcomb, K.; Jones, D.; Kercher, M.; Mineweaser, J.; Schiff, A.; Shattuck, M.; Gralla, E.; Goentzel, J.; et al. Development and use of a comprehensive humanitarian assessment tool in post-earthquake haiti. Procedia Eng. 2014, 78, 10–21. [Google Scholar] [CrossRef] [Green Version]
- Balcik, B.; Yanıkoğlu, I. A robust optimization approach for humanitarian needs assessment planning under travel time uncertainty. Eur. J. Oper. Res. 2020, 282, 40–57. [Google Scholar] [CrossRef]
- Ben-Tal, A.; Nemirovski, A. Selected topics in robust convex optimization. Math. Program. 2008, 112, 125–158. [Google Scholar] [CrossRef]
- Ben-Tal, A.; El Ghaoui, L.; Nemirovski, A. Robust Optimization; Princeton University Press: Princeton, NJ, USA, 2009. [Google Scholar]
- Bertsimas, D.; Brown, D.B.; Caramanis, C. Theory and applications of robust optimization. SIAM Rev. 2011, 53, 464–501. [Google Scholar] [CrossRef]
- Balcik, B. Site selection and vehicle routing for post-disaster rapid needs assessment. Transp. Res. Part E Logist. Transp. Rev. 2017, 101, 30–58. [Google Scholar] [CrossRef]
- Pamukcu, D.; Balcik, B. A multi-cover routing problem for planning rapid needs assessment under different information-sharing settings. OR Spectrum 2020, 42, 1–42. [Google Scholar] [CrossRef]
- Li, X.; Liu, X.; Ma, H.; Hu, S. Integrated routing optimization for post-disaster rapid-detailed need assessment. Int. J. Gen. Syst. 2020, 49, 521–545. [Google Scholar] [CrossRef]
- Bruni, M.; Khodaparasti, S.; Beraldi, P. The selective minimum latency problem under travel time variability: An application to post-disaster assessment operations. Omega 2020, 92, 102154. [Google Scholar] [CrossRef]
- Hakimifar, M.; Balcik, B.; Fikar, C.; Hemmelmayr, V.; Wakolbinger, T. Evaluation of field visit planning heuristics during rapid needs assessment in an uncertain post-disaster environment. Ann. Oper. Res. 2021, 1–42. [Google Scholar] [CrossRef]
- Hakimifar, M.; Hemmelmayr, V.; Tricoire, F. A lexicographic maximin approach to the selective assessment routing problem. arXiv 2022, arXiv:2201.09599. [Google Scholar]
- Ogryczak, W. On the lexicographic minimax approach to location problems. Eur. J. Oper. Res. 1997, 100, 566–585. [Google Scholar] [CrossRef]
- Liu, S.; Papageorgiou, L.G. Multiobjective optimisation of production, distribution and capacity planning of global supply chains in the process industry. Omega 2013, 41, 369–382. [Google Scholar] [CrossRef]
- Bertsimas, D.; Lulli, G.; Odoni, A. The air traffic flow management problem: An integer optimization approach. In Proceedings of the International Conference on Integer Programming and Combinatorial Optimization, Bertinoro, Italy, 26–28 May 2008; pp. 34–46. [Google Scholar]
- Nace, D.; Orlin, J.B. Lexicographically minimum and maximum load linear programming problems. Oper. Res. 2007, 55, 182–187. [Google Scholar] [CrossRef] [Green Version]
- Ogryczak, W.; Pióro, M.; Tomaszewski, A. Telecommunications network design and max-min optimization problem. J. Telecommun. Inf. Technol. 2005, 3, 43–56. [Google Scholar]
- Saliba, S. Heuristics for the lexicographic max-ordering vehicle routing problem. Cent. Eur. J. Oper. Res. 2006, 14, 313–336. [Google Scholar] [CrossRef]
- Lehuédé, F.; Péton, O.; Tricoire, F. A lexicographic minimax approach to the vehicle routing problem with route balancing. Eur. J. Oper. Res. 2020, 282, 129–147. [Google Scholar] [CrossRef]
- Tricoire, F. Multi-directional local search. Comput. Oper. Res. 2012, 39, 3089–3101. [Google Scholar] [CrossRef] [Green Version]
- Rath, S.; Gendreau, M.; Gutjahr, W.J. Bi-objective stochastic programming models for determining depot locations in disaster relief operations. Int. Trans. Oper. Res. 2016, 23, 997–1023. [Google Scholar] [CrossRef]
- Gao, X.; Cao, C. Multi-commodity rebalancing and transportation planning considering traffic congestion and uncertainties in disaster response. Comput. Ind. Eng. 2020, 149, 106782. [Google Scholar] [CrossRef]
- Kimms, A.; Maiwald, M. Bi-objective safe and resilient urban evacuation planning. Eur. J. Oper. Res. 2018, 269, 1122–1136. [Google Scholar] [CrossRef]
- Samani, M.R.G.; Torabi, S.A.; Hosseini-Motlagh, S.M. Integrated blood supply chain planning for disaster relief. Int. J. Disaster Risk Reduct. 2018, 27, 168–188. [Google Scholar] [CrossRef]
- Dubois, D.; Fargier, H.; Prade, H. Refinements of the maximin approach to decision-making in a fuzzy environment. Fuzzy Sets Syst. 1996, 81, 103–122. [Google Scholar] [CrossRef]
- Bouveret, S.; Lemaitre, M. Computing leximin-optimal solutions in constraint networks. Artif. Intell. 2009, 173, 343–364. [Google Scholar] [CrossRef] [Green Version]
- Gralla, E.; Goentzel, J. Humanitarian transportation planning: Evaluation of practice-based heuristics and recommendations for improvement. Eur. J. Oper. Res. 2018, 269, 436–450. [Google Scholar] [CrossRef]
- Rao, R.V. Jaya: An Advanced Optimization Algorithm and Its Engineering Applications; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Potvin, J.Y.; Gendreau, M. Handbook of Metaheuristics; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Jarboui, B.; Siarry, P.; Teghem, J. Metaheuristics for Production Scheduling; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Theophilus, O.; Dulebenets, M.A.; Pasha, J.; Lau, Y.Y.; Fathollahi-Fard, A.M.; Mazaheri, A. Truck scheduling optimization at a cold-chain cross-docking terminal with product perishability considerations. Comput. Ind. Eng. 2021, 156, 107240. [Google Scholar] [CrossRef]
- Hemmelmayr, V.C.; Cordeau, J.F.; Crainic, T.G. An adaptive large neighborhood search heuristic for two-echelon vehicle routing problems arising in city logistics. Comput. Oper. Res. 2012, 39, 3215–3228. [Google Scholar] [CrossRef] [Green Version]
- Pasha, J.; Dulebenets, M.A.; Kavoosi, M.; Abioye, O.F.; Wang, H.; Guo, W. An optimization model and solution algorithms for the vehicle routing problem with a “factory-in-a-box”. IEEE Access 2020, 8, 134743–134763. [Google Scholar] [CrossRef]
- Erdoğan, S.; Miller-Hooks, E. A green vehicle routing problem. Transp. Res. Part E Logist. Transp. Rev. 2012, 48, 100–114. [Google Scholar] [CrossRef]
- Koç, Ç.; Bektaş, T.; Jabali, O.; Laporte, G. The impact of depot location, fleet composition and routing on emissions in city logistics. Transp. Res. Part B Methodol. 2016, 84, 81–102. [Google Scholar] [CrossRef]
- Özdamar, L.; Ertem, M.A. Models, solutions and enabling technologies in humanitarian logistics. Eur. J. Oper. Res. 2015, 244, 55–65. [Google Scholar] [CrossRef]
- Doerner, K.F.; Gutjahr, W.J.; Nolz, P.C. Multi-criteria location planning for public facilities in tsunami-prone coastal areas. OR Spectrum 2009, 31, 651–678. [Google Scholar] [CrossRef] [Green Version]
- Shaw, P. Using constraint programming and local search methods to solve vehicle routing problems. In Proceedings of the International Conference on Principles and Practice of Constraint Programming, Pisa, Italy, 26–30 October 1998; pp. 417–431. [Google Scholar]
- Ropke, S.; Pisinger, D. An adaptive large neighborhood search heuristic for the pickup and delivery problem with time windows. Transp. Sci. 2006, 40, 455–472. [Google Scholar] [CrossRef] [Green Version]
- Pisinger, D.; Ropke, S. Large neighborhood search. In Handbook of Metaheuristics; Springer: Berlin/Heidelberg, Germany, 2019; pp. 99–127. [Google Scholar]
- Pisinger, D.; Ropke, S. A general heuristic for vehicle routing problems. Comput. Oper. Res. 2007, 34, 2403–2435. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instance | N-Type/K/ | Time Limit (s) | Instance | N-Type/K/ | Time Limit (s) |
|---|---|---|---|---|---|
| R1 | 25_R/2/2 | 90 | RC1 | 25_RC/2/2 | 90 |
| R2 | 25_R/2/3 | RC2 | 25_RC/2/3 | ||
| R3 | 25_R/2/4 | RC3 | 25_RC/2/4 | ||
| R4 | 25_R/3/2 | RC4 | 25_RC/3/2 | ||
| R5 | 25_R/3/3 | RC5 | 25_RC/3/3 | ||
| R6 | 25_R/3/4 | RC6 | 25_RC/3/4 | ||
| R7 | 50_R/3/3 | 180 | RC7 | 50_RC/3/3 | 180 |
| R8 | 50_R/3/4 | RC8 | 50_RC/3/4 | ||
| R9 | 50_R/3/5 | RC9 | 50_RC/3/5 | ||
| R10 | 50_R/4/3 | RC10 | 50_RC/4/3 | ||
| R11 | 50_R/4/4 | RC11 | 50_RC/4/4 | ||
| R12 | 50_R/4/5 | RC12 | 50_RC/4/5 | ||
| R13 | 75_R/3/3 | 360 | RC13 | 75_RC/3/3 | 360 |
| R14 | 75_R/3/4 | RC14 | 75_RC/3/4 | ||
| R15 | 75_R/3/6 | RC15 | 75_RC/3/6 | ||
| R16 | 75_R/5/3 | RC16 | 75_RC/5/3 | ||
| R17 | 75_R/5/4 | RC17 | 75_RC/5/4 | ||
| R18 | 75_R/5/6 | RC18 | 75_RC/5/6 | ||
| R19 | 100_R/3/4 | 720 | RC19 | 100_RC/3/4 | 720 |
| R20 | 100_R/3/6 | RC20 | 100_RC/3/6 | ||
| R21 | 100_R/3/8 | RC21 | 100_RC/3/8 | ||
| R22 | 100_R/6/4 | RC22 | 100_RC/6/4 | ||
| R23 | 100_R/6/6 | RC23 | 100_RC/6/6 | ||
| R24 | 100_R/6/8 | RC24 | 100_RC/6/8 |
| Parameter | Name | Value |
|---|---|---|
| q | Ruin quantity used in the destroy operators | ∼ Random(1, 0.3*M) |
| r | Reaction factor controlling the speed of weight-adjustment-algorithm changes | 0.1 |
| Degree of randomization for worst removal operator | 5 | |
| Degree of randomization for related removal operator | 3 |
| Instance | Deterministic | Robust-Box | |
|---|---|---|---|
| % of Infeasible Solutions | % of Infeasible Solutions | ||
| RC5 | 0.1 | 25.3% | 0% |
| 0.2 | 36.3% | 0% | |
| 0.3 | 42.9% | 0% | |
| 0.6 | 52.1% | 0% | |
| R7 | 0.1 | 8.6% | 0% |
| 0.2 | 15.8% | 0% | |
| 0.3 | 24.5% | 0% | |
| 0.6 | 40.4% | 0% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hakimifar, M.; Hemmelmayr, V.C.; Tricoire, F. A Bi-Objective Field-Visit Planning Problem for Rapid Needs Assessment under Travel-Time Uncertainty. Sustainability 2022, 14, 3024. https://doi.org/10.3390/su14053024
Hakimifar M, Hemmelmayr VC, Tricoire F. A Bi-Objective Field-Visit Planning Problem for Rapid Needs Assessment under Travel-Time Uncertainty. Sustainability. 2022; 14(5):3024. https://doi.org/10.3390/su14053024
Chicago/Turabian StyleHakimifar, Mohammadmehdi, Vera C. Hemmelmayr, and Fabien Tricoire. 2022. "A Bi-Objective Field-Visit Planning Problem for Rapid Needs Assessment under Travel-Time Uncertainty" Sustainability 14, no. 5: 3024. https://doi.org/10.3390/su14053024
APA StyleHakimifar, M., Hemmelmayr, V. C., & Tricoire, F. (2022). A Bi-Objective Field-Visit Planning Problem for Rapid Needs Assessment under Travel-Time Uncertainty. Sustainability, 14(5), 3024. https://doi.org/10.3390/su14053024