1. Introduction
Connected and autonomous vehicles (CAVs) fundamentally differ from human-driven vehicles (HDVs) in terms of their operational behaviour. CAVs can be adjusted to minimise emissions, improve fuel savings, and harmonise traffic flow due to their shorter reaction times [
1,
2,
3,
4,
5]. Additionally, they are expected to change travel behaviour by generating new demand for very young, elderly, or disabled individuals, being utilized for freight transport, and impacting parking and ride-sharing patterns, thereby affecting the total vehicle miles travelled [
6]. Furthermore, CAVs can enhance traffic safety by adhering to traffic laws and mitigating human driving errors [
7].
An increasing number of new automobile models are being equipped with amenities and advanced assistance systems, including adaptive cruise control, parking assist technologies, and self-driving capabilities. However, as CAVs are still in the testing stage, it remains challenging to predict their actual behaviour and determine if they will deliver the projected safety benefits. Consequently, significant research efforts are required to develop a transportation system that optimally harnesses the potential advantages of CAVs. The knowledge gained from research is essential for stakeholders to achieve incremental improvements in CAV design and address complex questions related to legal, safety, and regulation issues.
One common research approach to studying the safety impact of CAVs is through traffic simulation considering different CAV market penetration rates [
8]. Simulation tools, in general, allow for the comparison of multiple conditions under the same traffic input and facilitate the study of various mixed traffic scenarios more quickly and easily than field-based investigations. In CAV safety research, simulation is the most reasonable approach since access to real CAV field data is still limited [
8]. Consequently, numerous researchers have endeavoured to conduct safety evaluation studies based on traffic simulations utilizing surrogate safety measures (SSM).
Specifically, traffic safety is measured based on the calibration of various traffic flow models to reflect CAV driving behaviour. Most literature studies have used unique calibration values for these parameters, estimated based on future CAV behaviour (e.g., [
9,
10,
11]). Nevertheless, further exploration is needed to understand the effect of CAV behaviour, and an examination of which driving parameters may have a concrete effect on safety analysis could provide valuable insights into the safety impact of CAV implementation for both designers and researchers.
Despite a few studies that have attempted to explore the sensitivity of a limited number of parameters related to CAV driving behaviour or tested different calibrated traffic models for various levels of automation, no specific sensitivity analysis has been published for the majority of commonly used parameters that calibrate CAV driving behaviour in relation to their impact on traffic safety.
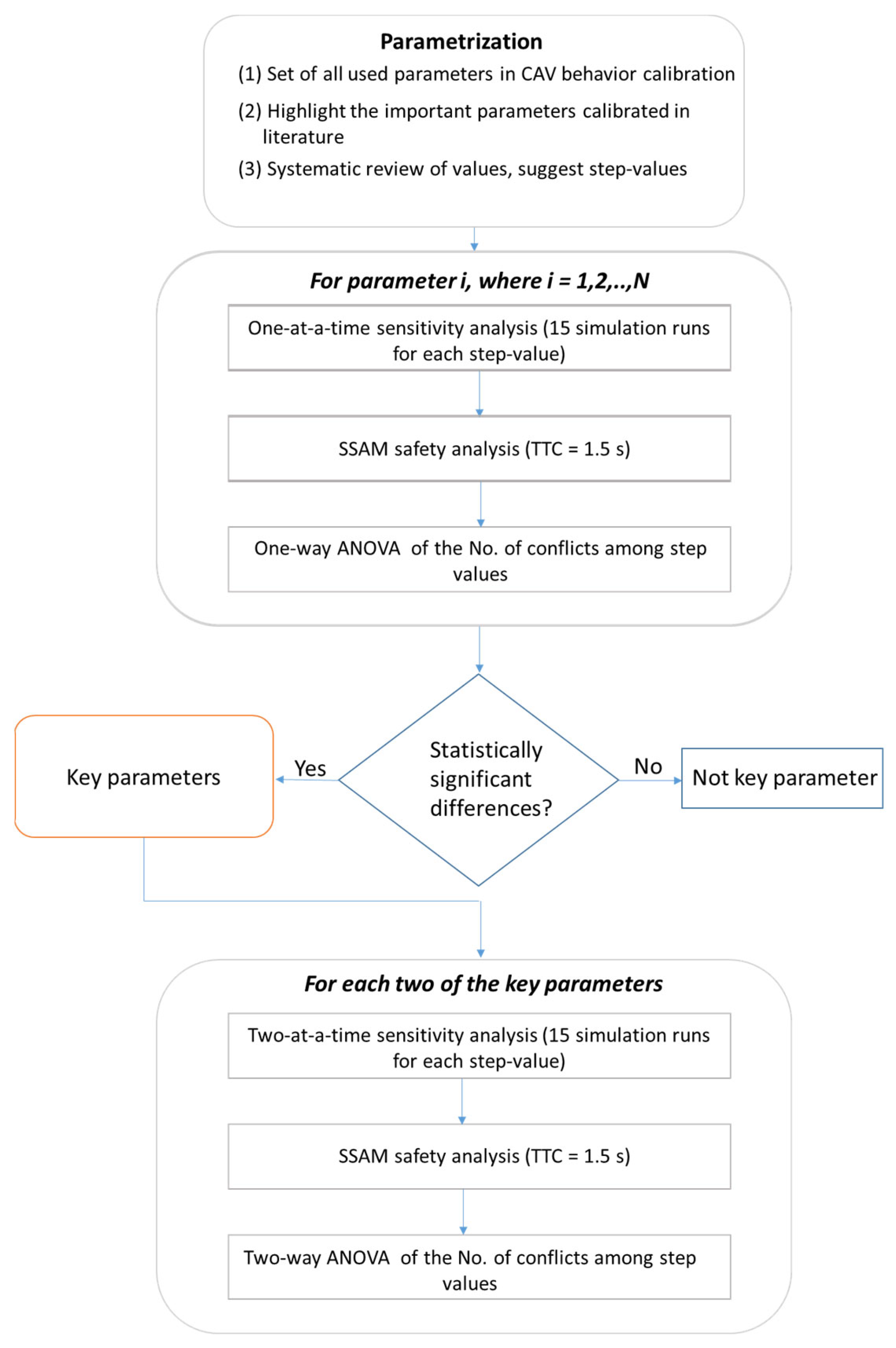
Therefore, the aim of this study is to thoroughly analyse CAV driving behaviour on roads from a safety perspective. Specifically, this study conducts a sensitivity analysis of traffic safety that, for the first time, aims to discover the effects of varying the values of widely acknowledged driving parameters used in the calibration of CAV behaviour in microsimulation models. A one-at-a-time sensitivity analysis is performed for each parameter to identify the key parameters with a higher effect on traffic safety. Subsequently, these significant parameters are analysed two at a time to gain a better understanding of their simultaneous effects.
In other simulation-based traffic safety studies (e.g., [
9,
10,
11]), traffic safety is determined by analysing traffic conflicts identified using the surrogate safety assessment model (SSAM). Traffic conflicts refer to observable non-crash incidents where there is a risk of accidents due to interactions between various road users in terms of their spatial and temporal trajectories if they do not alter their paths [
12]. Conflicts have proven to be capable of reflecting traffic safety on roads as they are highly correlated with crashes [
8]. Traffic simulation outputs, such as vehicle trajectories, are analysed using SSAM with predefined time-to-collision (TTC) thresholds. Interactions in which the TTC values fall below a predefined threshold are considered conflicts. Furthermore, statistical tests, such as one-way and two-way analysis of variance (ANOVA), are conducted on the explored parameters.
The remainder of this paper is organised as follows:
Section 2 presents a literature review on the impact of CAVs on safety.
Section 3 describes the methodology. The results of the sensitivity analysis are presented and discussed in
Section 4. Finally, in
Section 5, we draw conclusions from this study and discuss further developments and potential future research.
2. Literature Review
Traffic simulation platforms provide a practical method for evaluating various scenarios and fleets, including the operation of connected and autonomous vehicles (CAVs). The literature utilizes several traffic microsimulation platforms such as Aimsun, VISSIM, PARAMICS, and SUMO, each with different traffic flow models. The findings of these studies are comparable, indicating that CAVs can improve traffic safety, especially in scenarios with high penetration rates (e.g., [
9,
10,
11]). However, each study used its own proposed calibration parameters and values based on their estimation of future CAV behaviour. To obtain useful simulation outcomes, the dynamic and stochastic nature of data, along with the stochastic nature of traffic simulation models and internal calibration parameters, must be considered [
13]. Consequently, without a good understanding of the parameters that dominate a model during specific operations, the use of model-based algorithms in this area becomes challenging [
14].
The most relevant research to the current study, which evaluates the use of different parameter values in simulation, was conducted by Xie et al. [
15]. They calibrated SMARTS’s model parameters for each automation level, controlled the percentage of different vehicle types, and evaluated various data types from simulation runs to quantify the impact of autonomous vehicles on traffic efficiency and safety. They explored the effect of varying some parameters such as maximum acceleration, maximum deceleration, clearance, minimum headway, aggressiveness factor, and reaction time on traffic efficiency (travel time) and road safety (traffic conflicts) on freeways and urban streets with different traffic volumes. Their general conclusion proposed that greater aggressiveness in car-following parameters and shorter reaction times are key factors contributing to the improvement in traffic efficiency. However, their study mainly focused on automation levels and not on parameter sensitivity analysis. They calibrated all the model parameters’ values simultaneously among different traffic demands and did not specifically investigate the impact of changing these parameters. Similarly, Miqdady et al. [
16,
17] proposed various values for Gipps’ car-following and lane-change models among automation levels and vehicle types (passenger car, heavy vehicle). However, like [
15], they ran the various calibrated values simultaneously without exploring the impact of changing these parameters.
The following paragraphs highlight the commonly used parameters for CAV calibration and discuss the values proposed in the literature, which justify the suggested values used in the sensitivity analysis.
The parameters most commonly used are those related to car-following theory (longitudinal movement parameters), specifically acceleration and deceleration parameters. Researchers agree on their importance in understanding the impact of CAVs on traffic safety and efficiency [
18,
19]. However, other researchers have discussed the significance of calibrating other less frequently used parameters, such as the lane-changing parameters, as they believe that CAVs are expected to engage in more cooperative lane changes compared to HDVs, directly impacting traffic efficiency and safety [
18]. Other variables are also assumed to have a crucial influence on traffic safety, although they were not frequently considered in calibration due to limitations in microsimulation platforms. For example, reaction time is a highly important parameter [
19] that has recently been calibrated by vehicle type with the introduction of the API in the Aimsun platform, leading researchers to consider lower reaction times for CAVs.
Based on a comprehensive review of simulation-based studies that calibrated CAVs in their models, the parameters were classified into three attribute types: (1) parameters directly related to technology advancement (e.g., reaction time and clearance); (2) longitudinal movement parameters (e.g., acceleration, deceleration, speed oscillation, and platooning); and (3) lateral movement parameters (e.g., lateral clearance, look-ahead distance, and overtaking-speed threshold). Each study used three to five different parameters to calibrate CAV behaviour. Longitudinal movement parameters are the most acknowledged parameters, indicating that the major expected changes in CAV driving behaviour are related to this type of parameter. Therefore, the evaluated safety benefit of CAVs in the literature could be highly correlated with the harmonisation of longitudinal traffic flow and the enhancement of traffic safety.
This study suggests examining several parameters that are either frequently used in CAV calibration or important from a traffic safety perspective.
Figure 1 shows the parameters used in this study and the range of values found in the literature for each of them.
On the other hand,
Table 1 summarizes the proposed values for the sensitivity analysis based on the discussion provided in this section regarding the literature values.
Reaction time is one of the most proposed technology advancements in autonomous driving [
18,
19,
20]. However, reaction time is considered as a global parameter in modelling platforms and cannot be changed during simulation. Aimsun Next, in its recent editions, allows for the modelling of this feature for CAV modelling. As the majority of previous studies used VISSIM for CAV simulations, this parameter was uncommon during calibration. Zhang et al. [
22] used a value of 0.5 s while simulating CAVs with an external driver model extension. Other studies that have used the Aimsun Next platform assumed that CAVs should react within 0.1 s [
20,
21]. In a sensitivity analysis study, Xie et al. [
19] applied different values (2.0, 1.5, 1.0, 0.5, and 0.0 s for CAV levels from Level 0 to Level 4, respectively). As the default reaction time for HDVs in Aimsun platform is 0.8 s, and considering the high impact associated with this parameter in traffic safety, this study proposes the following values to be examined: 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, and 0.8 s.
The clearance between two vehicles in the standstill condition (i.e., the minimum standstill headway space) or the minimum gap is also an important parameter for safety considerations. In general, CAVs are expected to maintain shorter distances than HDVs [
18,
20]. In previous studies that used PTV–VISSIM models for modelling CAV, 1.2 m was suggested by Stanek et al. [
18] and 0.5 m was suggested by Sinha et al. [
29], compared to the default value in that model (1.5 m). Morando et al. [
14], who used two calibrated models (ATKIN [
19] and PTV [
30] models), utilised their suggested values for clearance (0.5 and 0.75 m). Using the SUMO model, HDV clearances are averaged to 2.5 m, whereas they were suggested to be 1.5 m for Level 2 and 1.0 m for Level 4 [
2]. Xie et al. [
15] used several values (1.0, 1.5, 2.0, 2.5, and 3.0 m) for different levels of automation (from Level 4 to Level 0, respectively). This study also suggests testing the effect of changes in this parameter on traffic safety using different values: 0.5, 1.0, and 1.5 m.
Regarding the wide review of CAV acceleration and deceleration, the maximum acceleration is the most frequent and debatable parameter used in CAV calibration (
Figure 1). Some studies have suggested lower values for CAVs than for HDVs [
22,
23], whereas others have considered higher values [
15,
19,
29]. Furthermore, others have maintained the same behavioural pattern [
1,
18,
24]. Karjanto et al. [
3] explained that the corresponding value should be related to the driving style. They suggested a higher value than for HDVs in the case of an aggressive driving style, whereas a cautious driving style should be represented by low values, similar to light rail transit values (1 m/s²) [
3]. On the other hand, regarding the level of automation, Guériau and Dusparic [
23] suggested that the maximum acceleration will decrease with the level of automation; for Level 0, Level 2, and Level 4, they suggested values of 2.5, 1.5, and 1.0 m/s², respectively. However, Xie et al. [
15] claimed that this value should increase from Level 0 to Level 4 from 1.4, 1.6, 1.8, 2.0, to 2.2 m/s², respectively. In this study, the proposed values to be tested are the following: 1.0, 2.0, 3.0, and 4.0 m/s², whereas the default value for HDVs in Aimsun is 3.0 m/s². Speed oscillations have also been reported in CAV traffic safety studies. However, the high correlation between this parameter and acceleration causes one parameter to reflect the other.
The same pattern of assumptions is related to CAV deceleration. In particular, normal deceleration has been presented within a wide range of values in the literature: between −1.3 and −7.5 m/s² (
Figure 1). ATKINS [
19] proposed a higher deceleration for autonomous vehicles. Guériau and Dusparic [
23] and Stanek et al. [
18] did not suggest any change between human and autonomous behaviours. However, the value reported by Zhang et al. [
22] for CAVs is lower than that for human driving. Regarding the maximum deceleration, it was assumed to be the same for humans and autonomous driving in several studies (e.g., [
9,
11,
18,
19,
20,
21,
22,
23]). They explained that it should not be affected by technology; it is the capacity of the vehicle’s motor, which is an extreme value that is followed within both cases with the same magnitude [
18]. Thus, this study follows previous research by studying traffic safety sensitivity using normal deceleration instead of maximum deceleration. The suggested values to be analysed are −2.0, −3.0, and −4.0 m/s².
Moreover, the sensitivity factor (that considers the effect of overestimating/underestimating leader deceleration) is a valuable indicator of traffic safety. A value below 1.0 refers to an underestimation case, whereas a value above 1.0 indicates that the vehicle overestimates the leader deceleration. To the best of our knowledge, only one study calibrated CAVs using Aimsun and attempted to change this parameter in the LEVITATE project [
25]. They suggested two values: 0.7 for cautious driving and 0.5 for aggressive driving. They assumed that, as a safety constraint, CAVs are more aggressive than HDVs, even when a cautious driving style is adopted. This study suggests studying different values for both cases (underestimation and overestimation): 0.5, 0.7, 0.9, 1.0, 1.1, and 1.3.
Finally, because a greater number of vehicles in a platoon reflects more braking actions [
27,
28], the maximum number of vehicles in a platoon (platoon size) is important for traffic safety. The default maximum platoon size for Aimsun is ten vehicles. However, Aramrattana et al. [
28] considered two, three, four, and five vehicles in their studies, whereas Faber et al. [
27] considered five, seven, and ten vehicles. This study tests the following platoon sizes: four, six, eight, and ten vehicles.
Regarding lateral movement calibration, Stanek et al. [
18] discussed that CAVs should perform more cooperative lane changes, as they could occur at a higher speed. In addition, they could be detected at smaller lateral distances. Nevertheless, lateral movement has not been sufficiently investigated in simulation-based studies. Recently, Delpiano [
31] recommended a study of the lateral dimension according to CAV behaviour. Aimsun developers demonstrated the feasibility of calibrating these parameters in their traffic model. Several lateral parameters were investigated in this study. First, the lateral clearance between vehicles was investigated; the average default value in the Aimsun is 0.3 m, and 0.2, 0.3, 0.4, and 0.5 m values are used for the sensitivity analysis.
Subsequently, the effect of modifying the distance zones used in the lane-changing model and look-ahead distances was analysed. To adjust when lane changes are considered, a factor for minimum and maximum look-ahead distances is defined for CAV behaviour. For example, if the look-ahead distance is set to 200 m, the minimum look-ahead factor is 0.9 and the maximum look-ahead factor is 1.2, then the perceived distance will range from 180 m (calculated as 0.9 × 200) to 240 m (calculated as 1.2 × 200). All vehicles randomly select distances within the range of 180–240 m using a uniform distribution. These values are specified as a range in the Aimsun model to randomise the behaviour. Different values have been assumed in the Aimsun calibration of CAV studies (1.25, 1.5 [
21], 1–1.25, and 1.1–1.3 [
25]). Since CAVs are expected to exhibit high cooperation during lane-changing, the values in both studies are higher than the human driving range for both cautious and aggressive driving styles. Based on previous studies and to explore the effect of lower values, the following values are suggested for sensitivity analysis: 0.8–1.2, 0.9–1.2, 1–1.25, and 1.1–1.3.
Finally, the study also analyses the speed threshold for overtaking (overtaking-speed threshold). When the leading vehicle is slower than the overtake-speed threshold (%), it will attempt to overtake. Previous Aimsun-based studies [
21,
25] have suggested lower values than the human driving value (90%) for both cautious and aggressive driving (80 and 85%, respectively). This study investigates four values (80, 85, 90, and 95%) to cover all cases.
5. Conclusions
Estimating the behaviour of connected and autonomous vehicles (CAVs) poses a challenge due to the limited availability and testing of these technologies among the general public. As transportation researchers delve deeper into the behaviour and operational constraints of CAVs, the sensitivity analysis applied in this study provides a reference point for gaining a comprehensive understanding of the effects on driving behaviour. This broader knowledge will offer insights to designers and decision makers, aiding in the enhancement of CAV programming to optimize traffic safety on the roads.
Therefore, this study aims to identify the critical behavioural driving parameters from a traffic safety perspective using simulation-based statistical analysis, employing both one-way and two-way ANOVA. Initially, the analysis is performed for each parameter individually and subsequently for different combinations of two parameters.
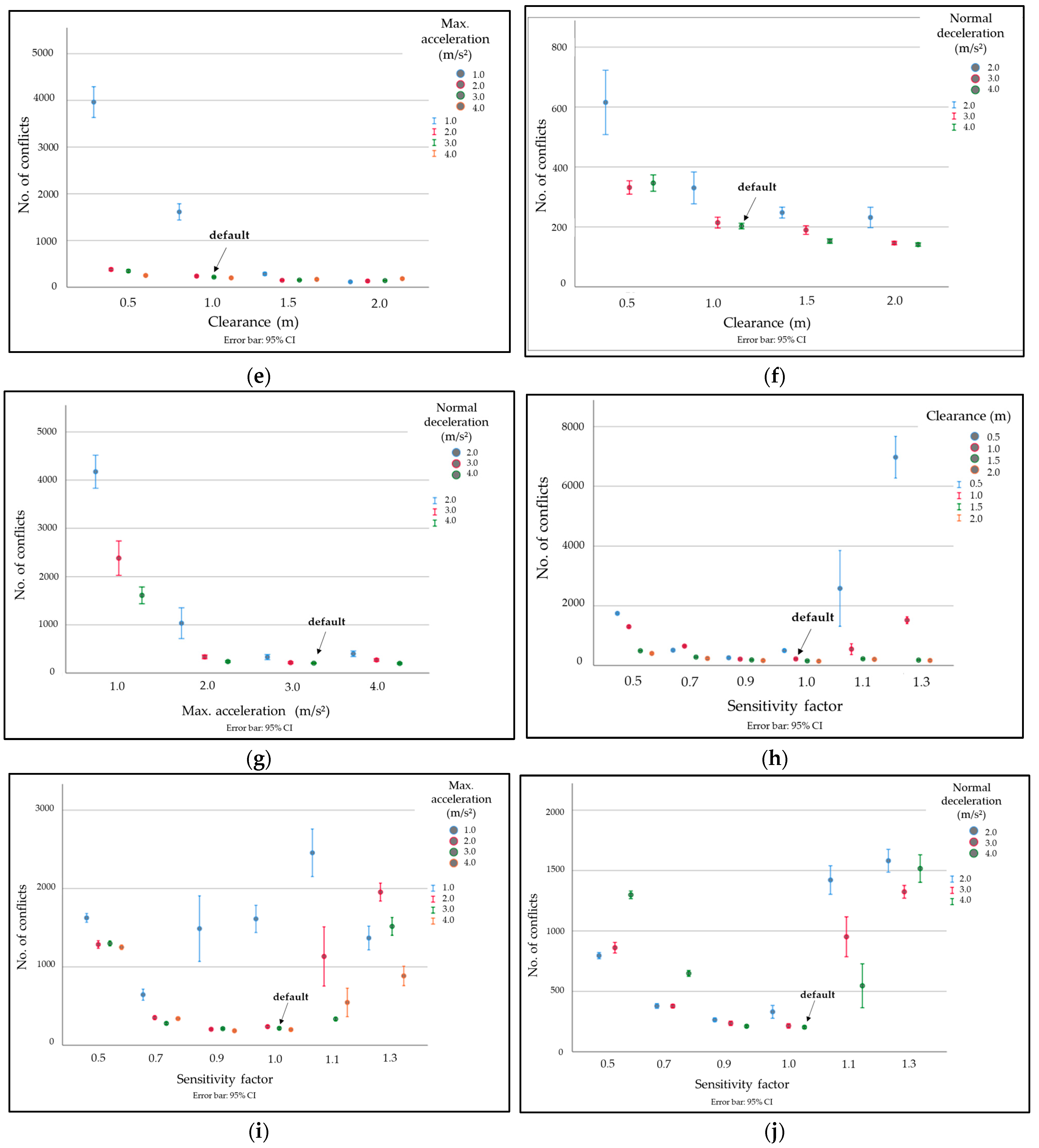
The one-at-a-time sensitivity analysis of the parameters highlighted the significant impact of varying the clearance, reaction time, sensitivity factor, maximum acceleration, and normal deceleration on traffic safety. The reaction time parameter showed a negative linear correlation with traffic safety. In addition, clearance, maximum acceleration, and normal deceleration at extremely low values have exhibited an extremely negative impact on traffic safety. A reasonable value for the sensitivity factor is recommended to be close to 1.0. Furthermore, traffic safety is not significantly influenced by the lateral movement parameters of motorways during off-peak traffic conditions. Finally, the platoons with four and six vehicles provided better traffic safety than those with eight or ten vehicles.
The main findings of the study are as follows: Maximum acceleration of 1 m/s² combined with any other parameter resulted in the highest number of conflicts. Among the maximum acceleration/normal deceleration combinations, those of high acceleration and deceleration yielded the best safety results. However, the maximum acceleration was more sensitive within these combinations. Traffic safety improved by decreasing the reaction time and simultaneously increasing the maximum acceleration or normal deceleration. To mitigate a minor underestimation (−10% to −30%) of the leader’s deceleration, it is advisable to increase the maximum acceleration and clearance. However, in the case of high underestimation/overestimation (−50% and +30%) of the leader deceleration, increasing the maximum acceleration is not sufficient to mitigate the negative effect on traffic safety, whereas a larger clearance achieves this outcome. In reaction time/sensitivity factor combinations, traffic safety is more sensitive to reaction time. Moreover, regardless of the fit of the assessment of the leading deceleration, very short reaction times (0.1–0.3 s) resulted in the largest reduction of conflicts.
However, this study has certain limitations. To date, CAV behaviour calibration has been limited to simulations and assumptions, and a calibration with real data is recommended for future studies. Moreover, the sensitivity analysis conducted in this study was a two-at-a-time analysis. Further optimisation of traffic safety using sensitivity analyses of all calibrated parameters are suggested to obtain the optimal combined effect for these parameters. The values used in the sensitivity analysis were the mean values of the studied parameters with normal distributions. To provide a better understanding of the effects of calibrating these parameters, sensitivity analyses with different parameter distributions (e.g., lognormal) should be applied. Finally, this study analysed a motorway segment under free-flow conditions. Analysing different road sections, road types, and traffic conditions may yield different results.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




