1. Introduction
Significant advances in the field of power electronics, the ever-increasing electrical loads, as well as concerns about environmental problems have led to the increased use of distributed generation (DG) resources [
1,
2,
3]. For this reason, the belief has been created among researchers in the field of energy that microgrids are one of the suitable options for solving these problems. A microgrid is a distribution network that includes DGs, loads, and energy storage systems [
1].
Microgrids are divided into two types, AC and DC [
4]. Today, the use of DC microgrids has increased due to the use of more DC loads and the fact that DC is the nature of most DGs [
5,
6]. DC microgrids have advantages such as a high efficiency [
7], the easy connection of different resources through electronic power converters [
8], and the ability to supply electricity to ships, remote areas from the power grids, and sensitive electronic equipment [
9].
One of the most important challenges of DC microgrids is designing a suitable protection system for these networks [
10]. Actually, the main challenges of protecting DC microgrids can be seen as the change in the short circuit level, the high rate of changes in the fault current, the very short time to detect and clear the fault, the high uncertainty of DGs, and the lack of a natural zero current crossing point [
11,
12]. In addition, the effect of low line impedance and fault resistance may make fault detection in DC microgrids a challenge [
10]. The high amplitude of the DC fault current may damage the converters [
13,
14]. Another challenging issue that may make fault detection in DC microgrids difficult is the effect of noise on the sampled signals [
15]. In addition, the uncertainty of the generation of DGs and transient states in the network, including the connecting/disconnecting of loads, may make fault detection a challenge [
16]. Therefore, fault detection in the shortest time in order to prevent damage to the equipment in the network is very important in protecting a microgrid. In order to solve the challenges raised, many studies have been conducted in this field in recent years. In general, these studies are divided into two categories; local computing and that based on communications [
17].
The most common scheme for fault detection in DC microgrids is differential protection [
18]. This method calculates the difference between the currents on both sides of the protection zone, and if this difference is greater than the threshold, it issues a trip command [
19]. The reason for using the threshold value in differential protection is to separate and distinguish the fault state from the normal state [
20]. Synchronizing the sampled signals and then comparing them with each other in order to issue a trip command in a certain time interval is one of the challenges of this method [
21]. Similarly, fault detection has been carried out in [
22] using the differential method. However, it has not taken into account the generation uncertainties of DGs and the presence of energy storage systems. A scheme based on master–slave in DC microgrids has been presented in [
23]. Therefore, the current status on both sides of the protection area is checked by the slaves and the information is provided to the master. Then, the master detects the fault by receiving the information sent by the slave using the differential method. Overcurrent relays have been used in [
24,
25] to detect pole-to-ground (PG) and pole-to-pole (PP) faults. Overcurrent protection works by dividing the microgrid into several different areas and then placing the corresponding relays at the beginning and end of each line [
26]. Other conventional methods such as traveling waves, which are mostly used in AC networks, are likely to have incorrect performance in fault detection due to the lack of phasor signals in DC microgrids [
27]. In [
28], traveling waves are used for fault detection. However, the noise caused by the switching of the converters may affect the optimal performance of this method [
29]. The use of transient waves for fault detection has also been suggested in some other studies. Therefore, the proposed method in [
30] used a probabilistic neural-network to distinguish between transient states caused by faults and states caused by switching. The proposed algorithm in [
28] is very sensitive to noise and may cause incorrect performances in normal network conditions. In [
31], the signal processing method is used. In this method, the current of all lines in the microgrid is measured. These values are compared to the value of normal network conditions. The fault is detected by obtaining the energy of the point of the grid whose current has changed the most. What challenges the proposed method in [
31] is not paying attention to the uncertainties in DG generations and not considering the effect of noise on the measured signals. The protection method presented in [
32,
33] is based on adaptive protection and communication between relays and protection units. In this method, all DGs and relays are connected to the central protection unit with communication channels. In this case, the status of each DG (active or inactive) is determined at any moment. According to the state of the microgrid, the central protection unit applies the settings related to each state to the relays using communication channels. In [
34], the adaptive protection method is used to protect the DC microgrid. The challenge facing adaptive protection is not considering the uncertainties of communication links. The uncertainties of communication links can reduce the reliability of DC microgrid protection [
16]. In [
35], in order to detect the fault, the parameter estimation method is used. This method samples the voltage and current signals of microgrid lines using several intelligent electronic devices (IEDs). The proposed method in [
35] does not consider the uncertainties of communication links. The impedance estimation method is proposed in [
36] in order to detect faults in the DC microgrids. However, the effect of noise on the sampled signals is not considered. Another method that has been used in fault detection in DC microgrids is the use of artificial intelligence. As an example, a method based on artificial intelligence for fault detection is proposed in [
37,
38]. This method has used local data, although not considering transient states may challenge the proposed method. Another common method for fault detection in DC microgrids is the distance protection method. This method calculates the impedance of the lines by measuring the voltage and current of the microgrid lines. In this method, in order to detect the fault, the calculated impedance is compared with the predetermined threshold value. However, due to the large changes in voltage and current during the fault occurrence, it may cause limitations in this protection method [
21,
39].
As is known, the main obstacle to the expansion of DC microgrids is the existence of protection problems in this type of grid. Most of the existing methods use the current signal for fault detection or, like differential methods, need to create high-speed communication links for fault detection [
40]. The use of the current signal alone can reduce the accuracy of the protection systems or improper performance during the creation of various transients, especially the transients created by the control system [
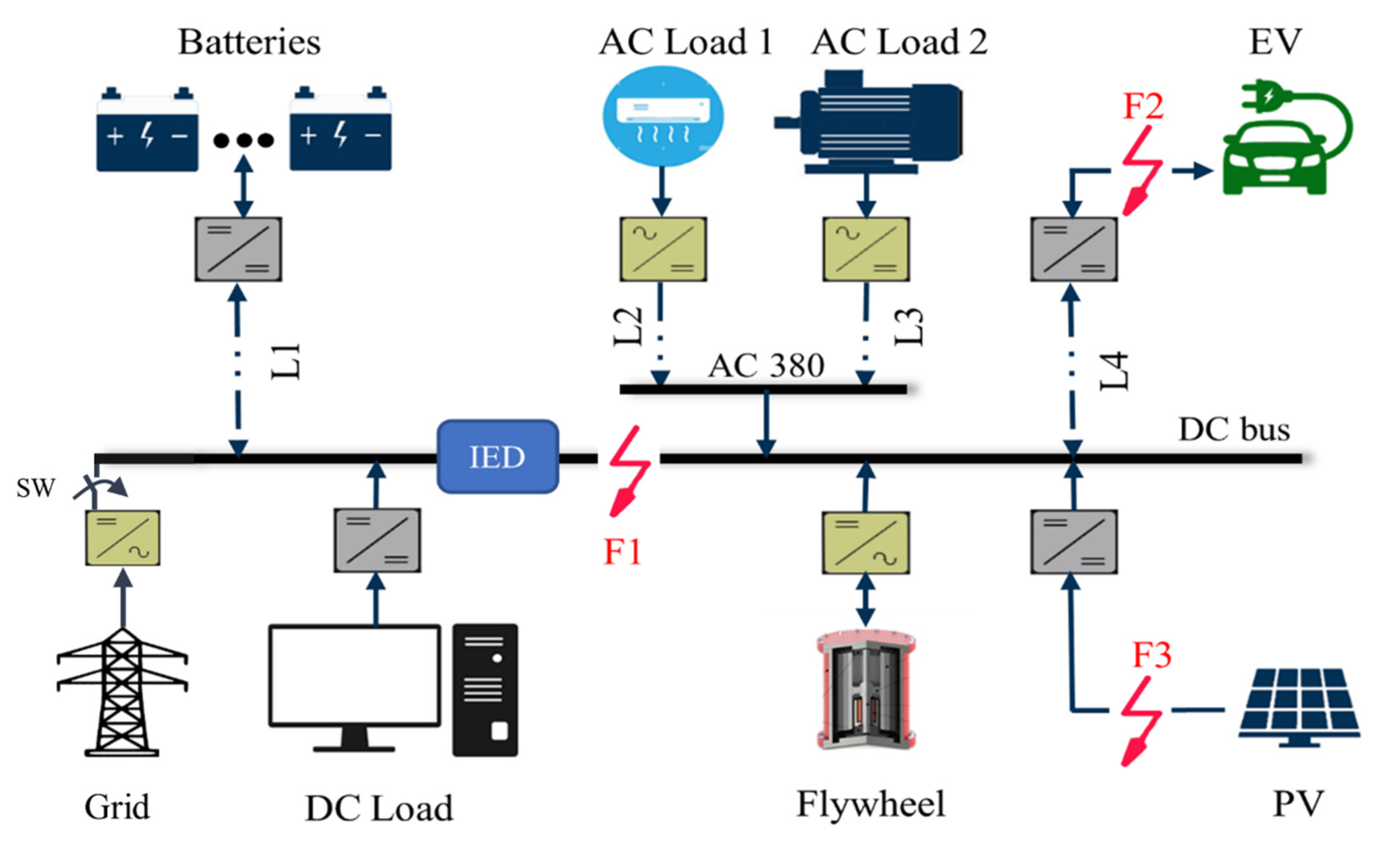
41]. Using methods with communication links or multiple IEDs to protect a DC microgrid, although solving this problem, will increase the operating cost of DC microgrids, which is one of the most important obstacles in the expansion of DC microgrids. For this reason, a combined method based on dynamic mode decomposition (DMD) and instantaneous frequency (IF) is proposed in this paper. In this method, first, a reference signal is made using the voltage and current signal sampled from the DC microgrid using DMD. The simultaneous use of voltage and current signals reduces the transient effects of the control system on the proposed protection method. Next, in order to detect the fault, the IF value of the reference signal is calculated by the Hilbert transform, and the fault is detected by determining a threshold value. It should be noted that the proposed method uses only one IED in order to detect faults in different parts of the microgrid. Using only one IED reduces the costs of building and operating the DC microgrid. The proposed new method is evaluated using a DC microgrid in MATLAB/Simulink 2019b software. The results of the investigations show that this method was able to detect all types of faults with different impedances with only one IED in a reasonable time. Also, the proposed method is not sensitive to noise and shows good performance even when the signal is noisy. Finally, the results of the comparison between the proposed new method and the existing methods of fault detection in DC microgrids show the improvement of the performance of this method in different conditions, including fault detection in different points of the DC microgrid, the correct performance in the noise of sampled signals, and changes in fault impedance.
This paper is divided as follows: In the second part, the relationships related to the proposed DMD-IF method are presented. In the third part, the sample network is introduced and the simulation results are presented. In the fourth part, a comparison between the method presented in this paper and the existing DC microgrid protection methods is examined.
4. Comparison with Other Fault Detection Methods in the DC Microgrid
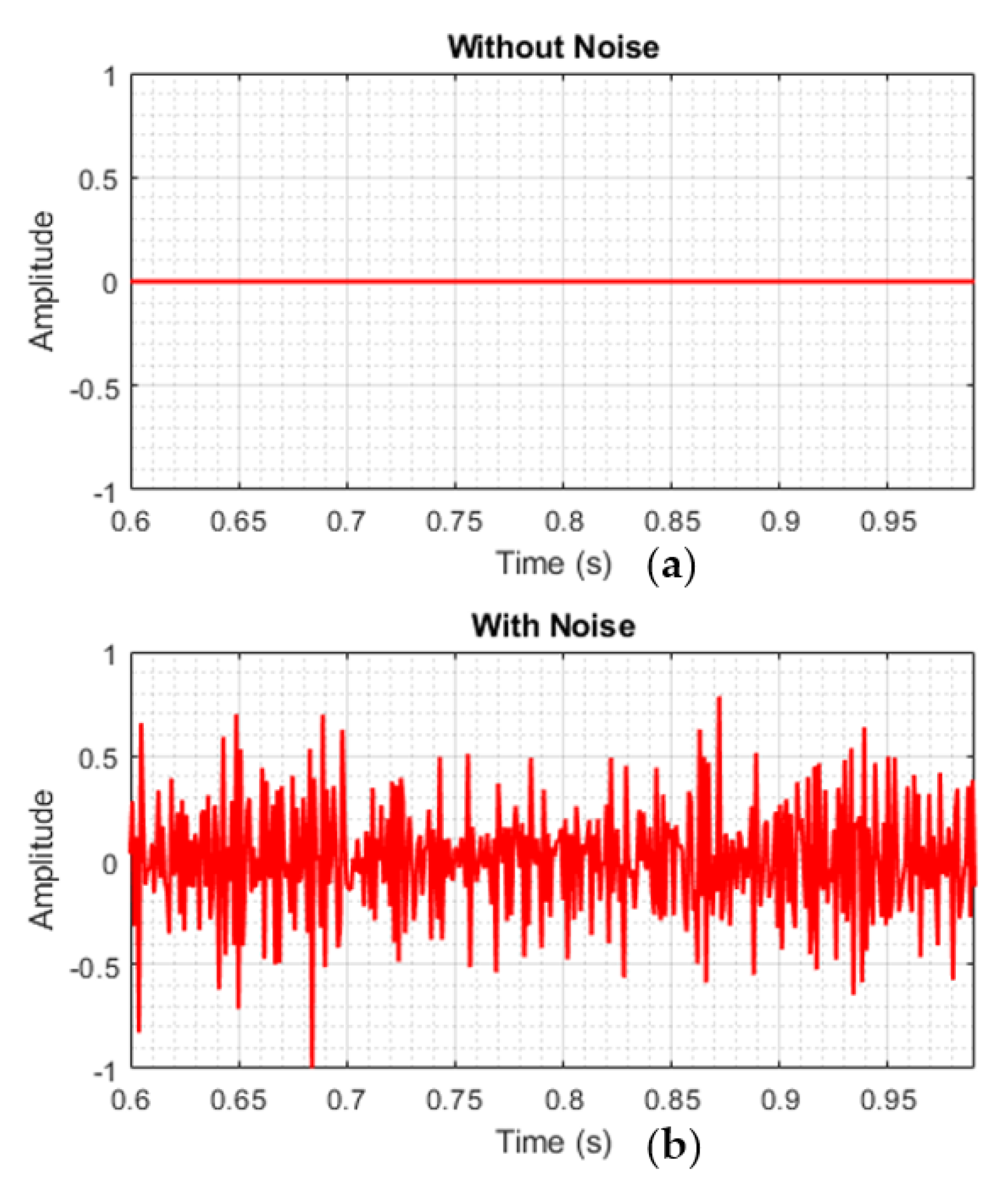
In many studies, the effect of noise on fault detection is not considered. In some studies, this issue may cause a wrong performance in fault detection when the signal is noisy. To investigate the mentioned problem, the method presented in [
52] was used. This method uses differential protection for fault detection. To investigate this method, the sampled signals have been applied once without considering the noise and again by applying white Gaussian noise with SNR = 35 dB to the protection algorithm presented in [
52].
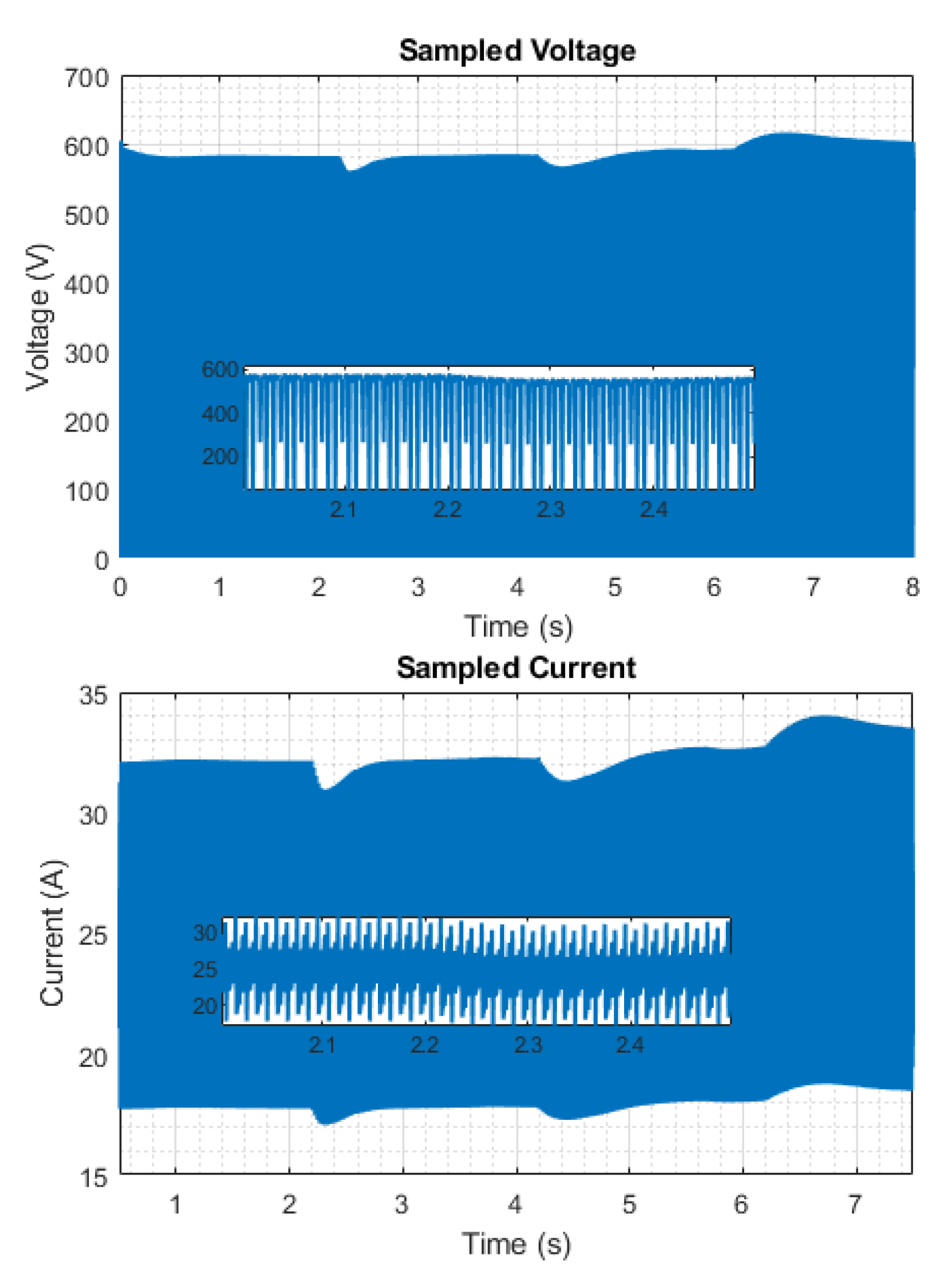
Figure 20 shows the results of the evaluations. As is clear from this figure, the method presented in [
52] has performed properly in the network without noise in normal conditions, but if the signal becomes noisy, it will issue the trip command in normal conditions.
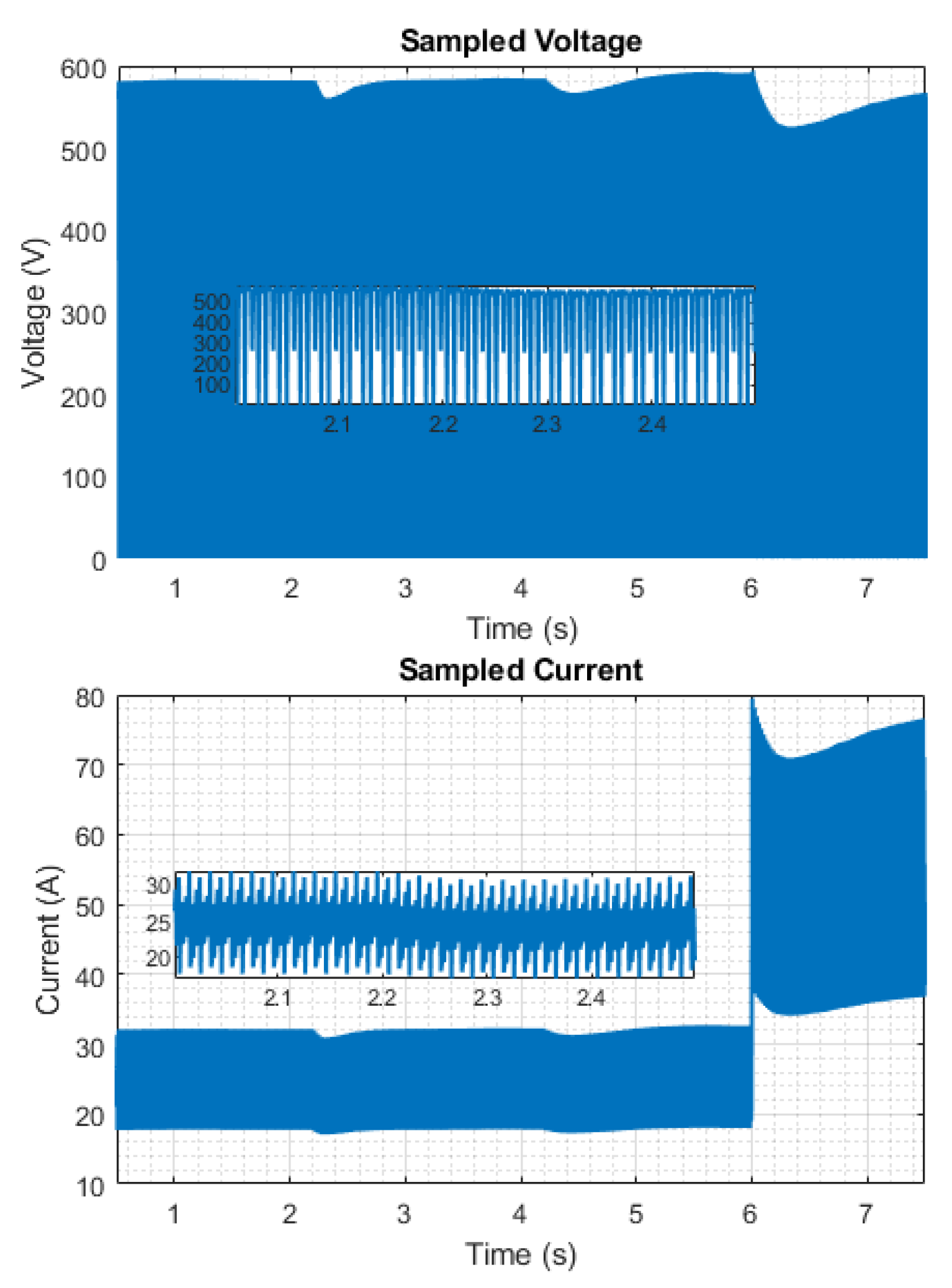
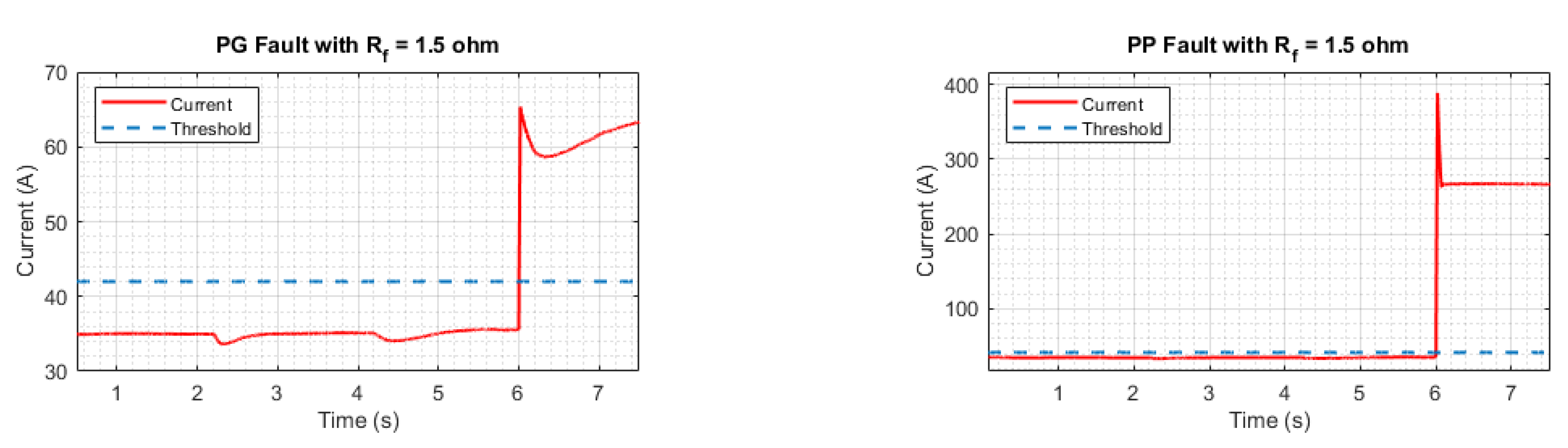
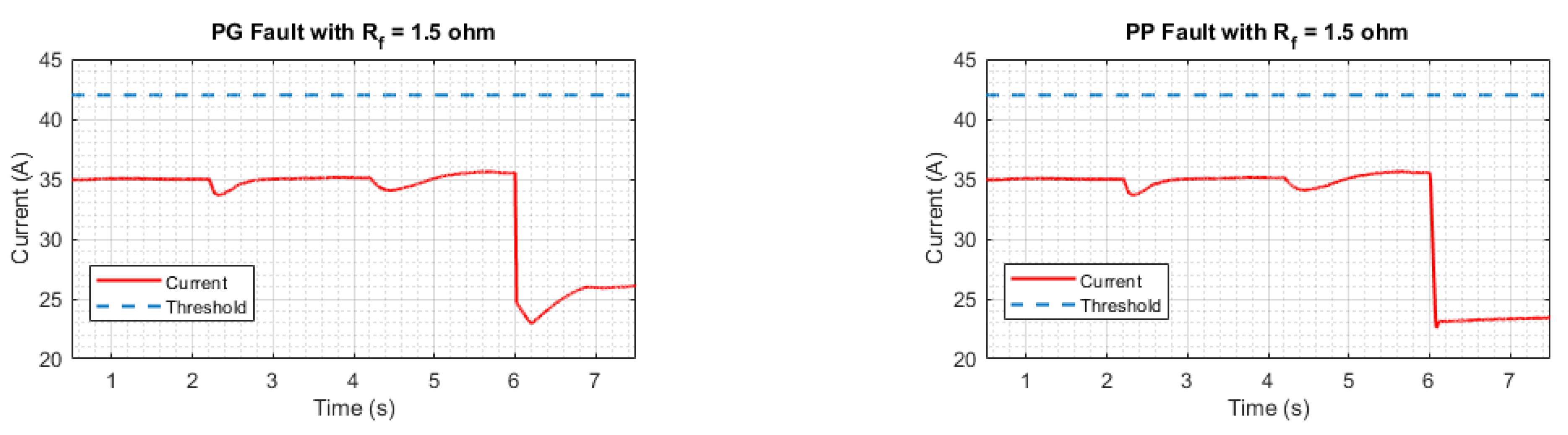
Although single-threshold overcurrent (OC) methods have shown good performances in different conditions, the use of these methods requires the use of a large number of IEDs in a microgrid. It is known that the use of several IEDs in a single-bus microgrid will increase the construction and operation costs. For example, the authors have tried to simulate the single-threshold OC method. According to the OC methods, the threshold value is 1.2 times the microgrid current.
Figure 21 shows the performance of the single-threshold OC method when a fault occurs on the main bus of the microgrid. Although this figure shows the correct performance of this method in fault detection, by considering that the main purpose of this paper is using an IED to protect the DC single-bus microgrid, OC methods should be able to detect faults in other parts of the microgrid as well. For this reason, in
Figure 22, the results of the OC method are presented for the occurrence of faults in the EV part. As is shown, this method does not have the ability to detect faults in different parts of the microgrid.
Finally, in order to conduct a comprehensive review, the method proposed in this paper has been compared with [
6,
34,
53,
54,
55] in
Table 9. As is clear from this table, the proposed method has worked successfully in different conditions.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}