Automated Sensing of Wave Inundation across a Rocky Shore Platform Using a Low-Cost Camera System

 ,
,
Abstract
:1. Introduction
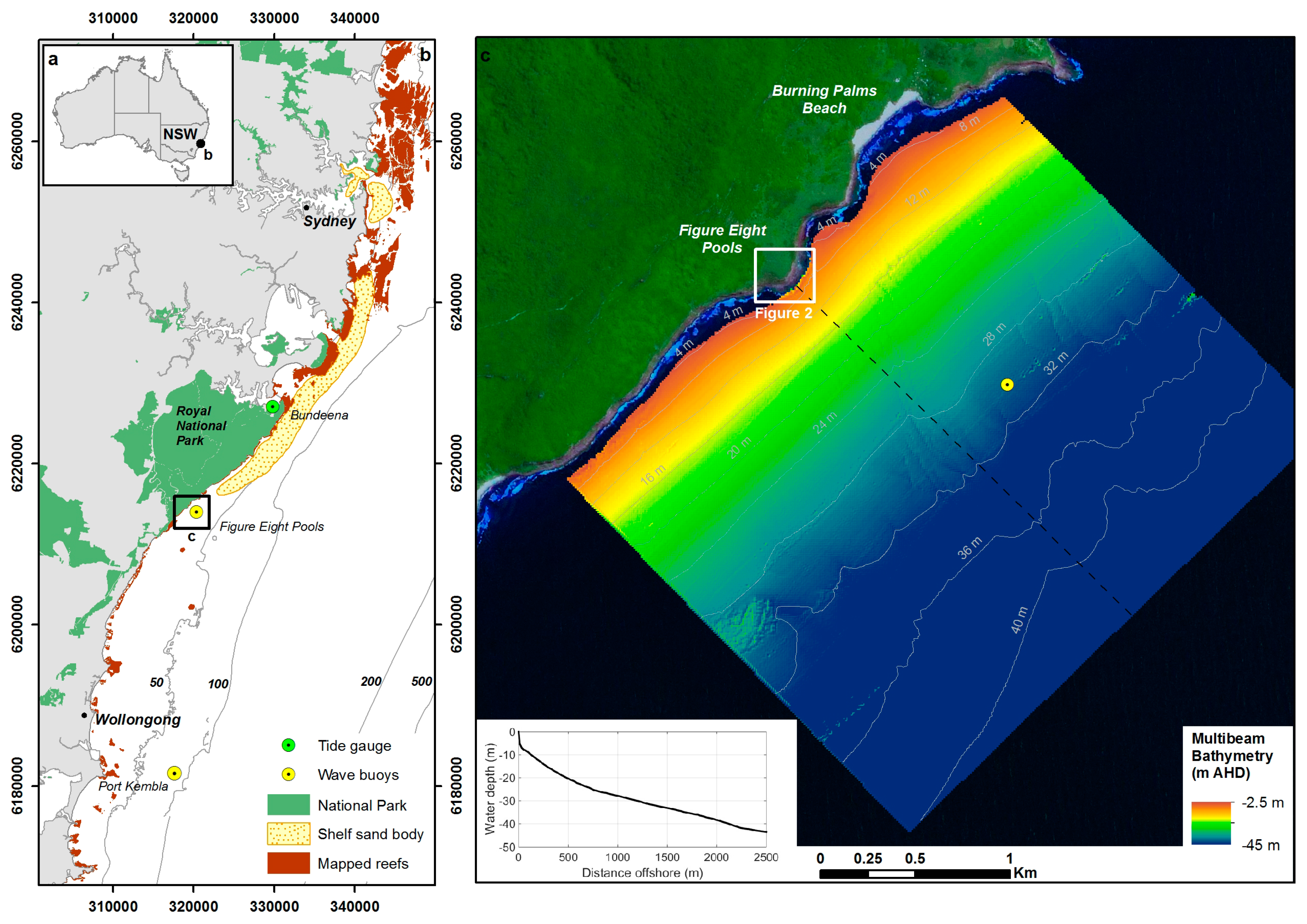
2. Field Setting
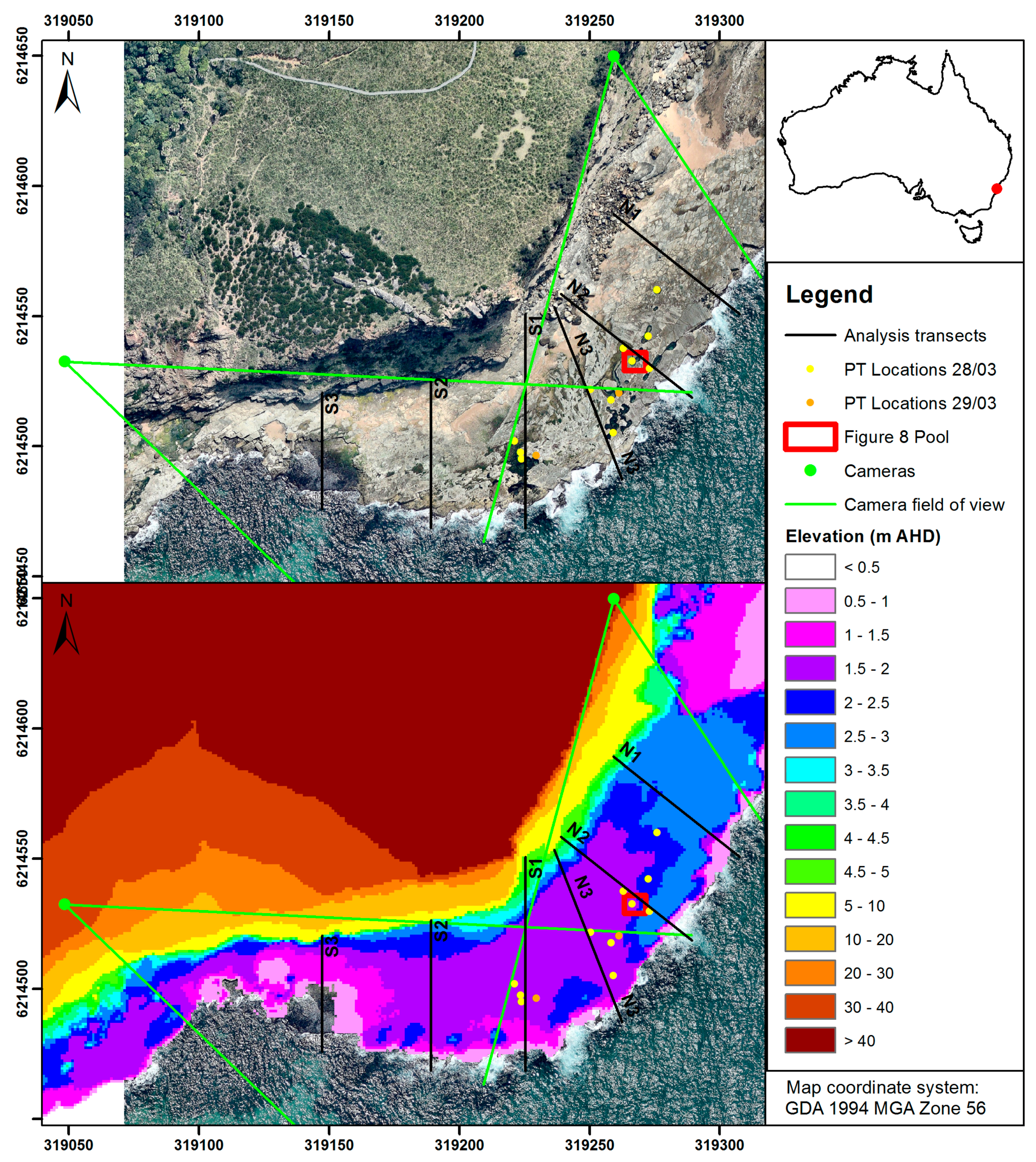
2.1. Rock Platform Geomorphology and Access
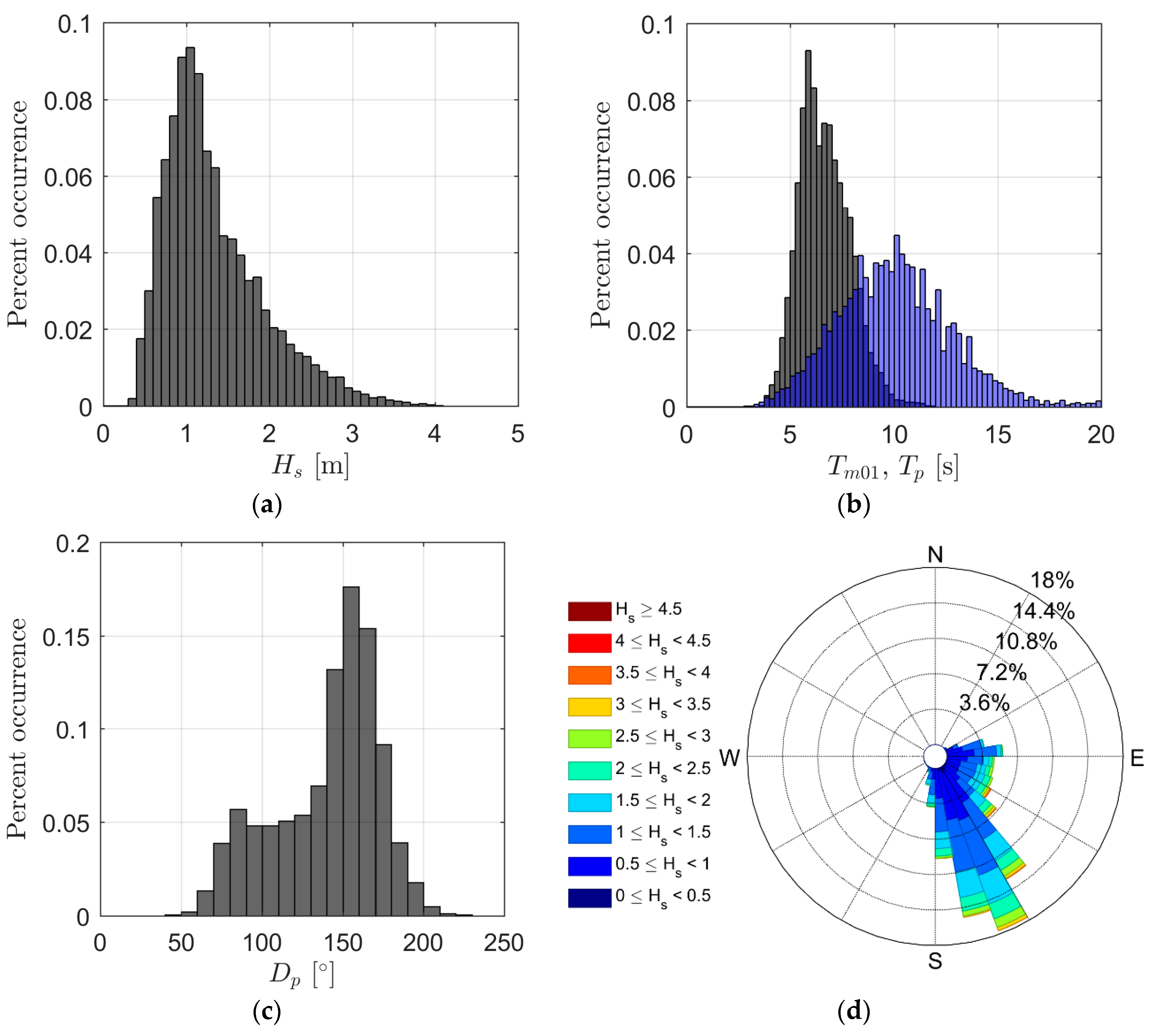
2.2. Nearshore Hydrodynamic Climate
3. Methods
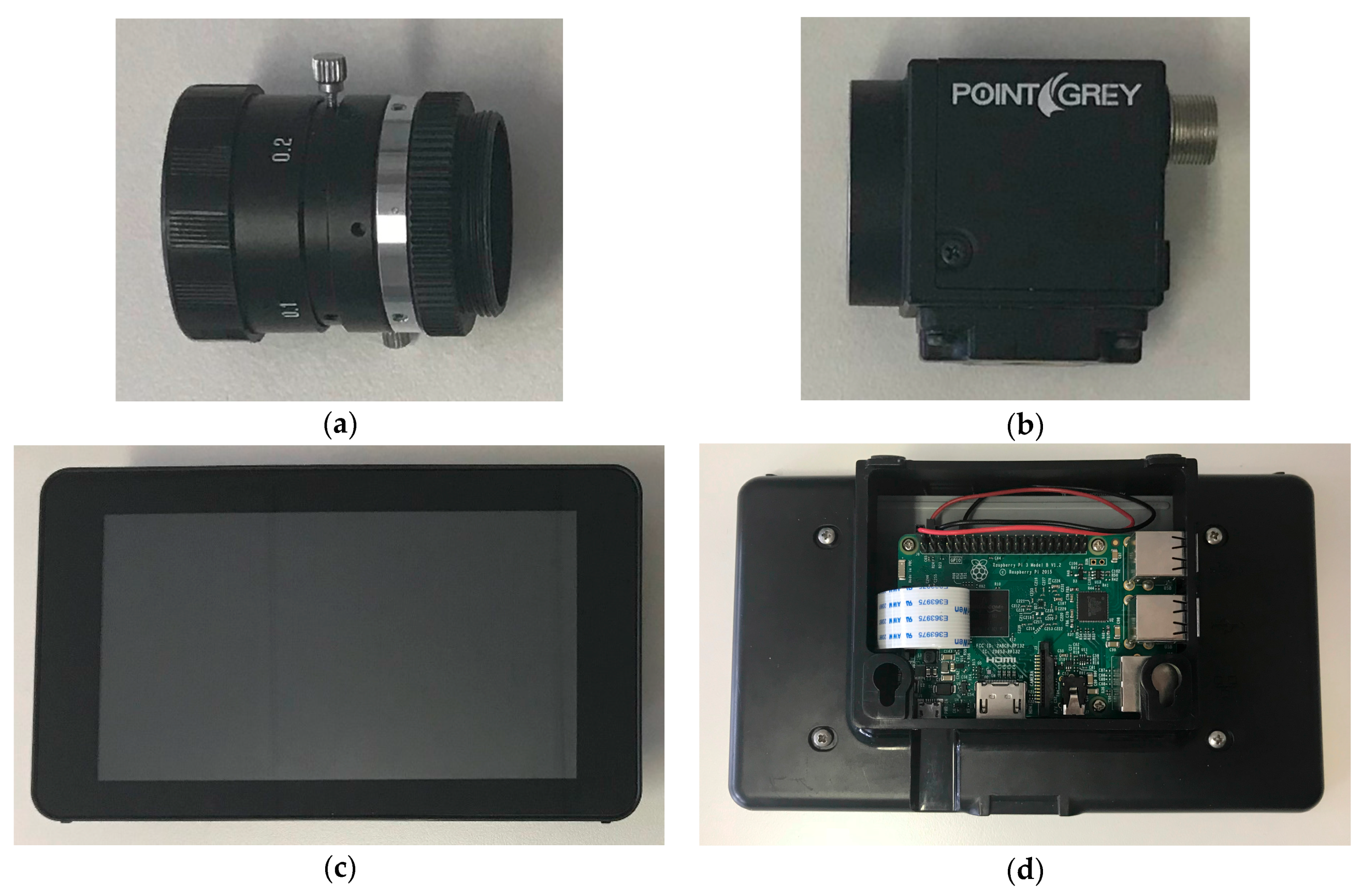
3.1. Camera System and Installation
3.2. Image Analysis
3.3. Pressure Transducer Data Collection
4. Results
4.1. Efficacy of Camera System and Camera Outputs
4.2. Comparison of Remotely Sensed and In Situ Observations
4.3. Overwash Analysis
5. Discussion
5.1. Camera System and Image Analysis
5.2. Overwash Wave Inundation Frequencies
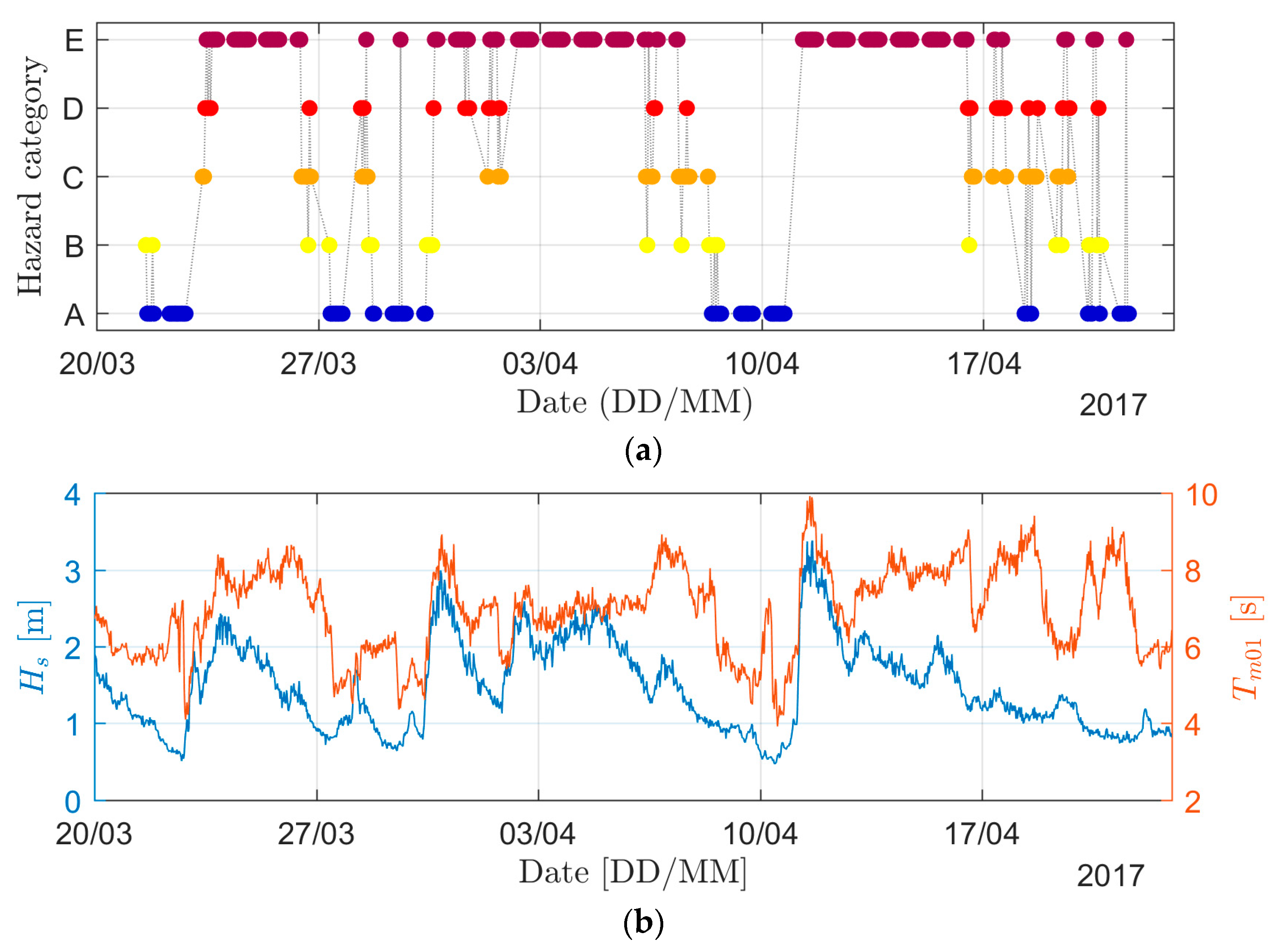
5.3. Development of a Wave Overwash Hazard Rating System
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sunamura, T. Geomorphology of Rocky Coasts; Wiley: Chichester, UK, 1992. [Google Scholar]
- Trenhaile, A.S. The Geomorphology of Rock Coasts; Clarendon Press: Oxford, UK, 1987. [Google Scholar]
- Beetham, E.P.; Kench, P.S. Field observations of infragravity waves and their behaviour on rock shore platforms. Earth Surf. Process. Landf. 2011, 36, 1872–1888. [Google Scholar] [CrossRef]
- Shand, T.D.; Peirson, W.L.; Banner, M.L.; Cox, R.J. Predicting Hazardous Conditions for Rock Fishing a Physical Model Study; University of New South Wales Water Research Laboratory: Manly Vale, Australia, 2009. [Google Scholar]
- Surf Life Saving Australia (SLSA). Annual Report 2013/14; Surf Life Saving Australia: Sydney, Australia, 2014. [Google Scholar]
- Surf Life Saving Australia (SLSA). National Coastal Safety Report 2014; Surf Life Saving Australia: Sydney, Australia, 2014. [Google Scholar]
- McArthur, A.G. Fire Behaviour in Eucalypt Forests; Department of National Development, Forestry and Timber Bureau: Canberra, Australia, 1967. [Google Scholar]
- Holman, R.A. Nearshore remote sensing. In Proceedings of the Coastal Dynamics, Tokyo, Japan, 7–11 September 2009; American Society of Civil Engineers: New York, NY, USA, 2009; pp. 37–48. [Google Scholar]
- Holman, R.A.; Stanley, J. The history and technical capabilities of argus. Coast. Eng. 2007, 54, 477–491. [Google Scholar] [CrossRef]
- Poate, T.G.; McCall, R.T.; Masselink, G. A new parameterisation for runup on gravel beaches. Coast. Eng. 2016, 117, 176–190. [Google Scholar] [CrossRef]
- Shannon, A.M.; Power, H.E.; Webster, J.M.; Vila-Concejo, A. Evolution of coral rubble deposits on a reef platform as detected by remote sensing. Remote Sens. 2013, 5, 1–18. [Google Scholar] [CrossRef]
- Price, T.D.; Ruessink, B.G. Morphodynamic zone variability on a microtidal barred beach. Mar. Geol. 2008, 251, 98–109. [Google Scholar] [CrossRef]
- Salmon, S.A.; Black, K.R.; Coco, G. The use of video-systems to measure run-up on beaches. J. Coast. Res. 2007, 50, 211–215. [Google Scholar]
- Power, H.E.; Holman, R.A.; Baldock, T.E. Swash zone boundary conditions derived from optical remote sensing of swash zone flow patterns. J. Geophys. Res. 2011, 116, C06007. [Google Scholar] [CrossRef]
- Murray, T.; Cartwright, N.; Tomlinson, R. Video-imaging of transient rip currents on the gold coast open beaches. J. Coast. Res. 2013, 65, 1809–1814. [Google Scholar] [CrossRef]
- Holman, R.A.; Sallenger, A.H.; Lippmann, T.C.; Haines, J.W. The application of video image processing to the study of nearshore processes. Oceanography 1993, 6, 78–85. [Google Scholar] [CrossRef]
- Kinsela, M.A.; Power, H.E.; Stringari, C.E.; Kendall, M.J.; Morris, B.D.; Hanslow, D.J. Wave Processes and Overwash Hazard on a High-Energy Rock Platform. In Proceedings of the Coastal Dynamics 2017, Helsingor, Denmark, 12–16 June 2017; pp. 685–696. [Google Scholar]
- Kennedy, D.M. Where is the seaward edge? A review and definition of shore platform morphology. Earth Sci. Rev. 2015, 147, 99–108. [Google Scholar] [CrossRef]
- Field, M.E.; Roy, P.S. Offshore transport and sand-body formation: Evidence from a steep, high-energy shoreface, southeastern Australia. J. Sediment. Petrol. 1984, 54, 1292–1302. [Google Scholar]
- Thom, B.G.; Keene, J.B.; Cowell, P.J.; Daley, M. East australian marine abrasion surface. In Australian Landscapes; Bishop, P., Pillans, B., Eds.; Geological Society Special Publications: London, UK, 2010; Volume 346, pp. 57–69. [Google Scholar]
- Aagaard, T.; Holm, J. Digitization of wave run-up using video records. J. Coast. Res. 1989, 5, 547–551. [Google Scholar]
- Fairchild, M.D. A revision of ciecam97s for practical applications. Color Res. Appl. 2001, 26, 418–427. [Google Scholar] [CrossRef]
- Sharma, G. (Ed.) Digital Color Imaging Handbook; CRC Press: Boca Raton, FL, USA, 2003; p. 816. [Google Scholar]
- Kim, Y.; Cho, B.H.; Kang, B.S.; Hong, D.I. Color Temperature Conversion System and Method Using the Same. U.S. Patent 7,024,034, 4 April 2006. [Google Scholar]
- EurOtop. Manual on Wave Overtopping of Sea Defences and Related Structures. An Overtopping Manual Largely based on European Research, but for Worldwide Application; Van der Meer, J.W., Allsop, N.W.H., Bruce, T., De Rouck, J., Kortenhaus, A., Pullen, T., Schüttrumpf, H., Troch, P., Zanuttigh, B., Eds.; 2016; Available online: www.overtopping-manual.com (accessed on 7 November 2017).
- Atkinson, A.L.; Power, H.E.; Moura, T.; Hammond, T.; Callaghan, D.P.; Baldock, T.E. Assessment of runup predictions by empirical models on non-truncated beaches on the South-East Australian Coast. Coast. Eng. 2017, 119, 15–31. [Google Scholar] [CrossRef]
- Blenkinsopp, C.E.; Matias, A.; Howe, D.; Castelle, B.; Marieu, V.; Turner, I.L. Wave runup and overwash on a prototype-scale sand barrier. Coast. Eng. 2016, 113, 88–103. [Google Scholar] [CrossRef]
- Vousdoukas, M.I.; Wziatek, D.; Almeida, L.P. Coastal vulnerability assessment based on video wave run-up observations at a mesotidal, steep-sloped beach. Ocean Dyn. 2012, 62, 123–137. [Google Scholar] [CrossRef]
- Vousdoukas, M.I.; Almeida, L.P.M.; Ferreira, O. Beach erosion and recovery during consecutive storms at a steep-sloping, meso-tidal beach. Earth Surf. Process. Landf. 2012, 37, 583–593. [Google Scholar] [CrossRef]
- Hanslow, D.J.; Nielsen, P. Shoreline set-up on natural beaches. J. Coast. Res. 1993, 15, 1–10. [Google Scholar]
- Nielsen, P. Wave setup: A field study. J. Geophys. Res. 1988, 93, 15643–15652. [Google Scholar] [CrossRef]
- Robertson, B.; Hall, K.; Zytner, R.; Nistor, I. Breaking waves: Review of characteristic relationships. Coast. Eng. J. 2013, 55, 466–479. [Google Scholar] [CrossRef]
- Robertson, B.; Gharabaghi, B.; Power, H.E. Predicting breaking wave conditions using gene expression programming. Coast. Eng. J. 2017, 59, 1750017. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Cost (US$) |
|---|---|
| Camera (FLIR Flea3) | $465 |
| Lens (Fujinon 6 mm) | $190 |
| Computer (Raspberry Pi, touch screen, case) | $144 |
| Storage (128 GB USB flash drive) | $59 |
| Camera housing | $185 |
| Mobile telephone modem 1 | $63 |
| Solar panel and frame (200 W, 24 V) | $424 |
| Solar regulator (15 A) | $127 |
| Cabling for solar panels to batteries | $152 |
| Gel batteries (12 V, 138 Ah, ×2) | $523 |
| Power converters (12 V to 5 V) | $34 |
| Battery housing (ventilated steel locker) | $386 |
| Assembly and testing of solar power system | $315 |
| Total | $3067 |
| Hazard Category | Hazard Name | Criteria | Hazard Type | Figure 13 Legend |
|---|---|---|---|---|
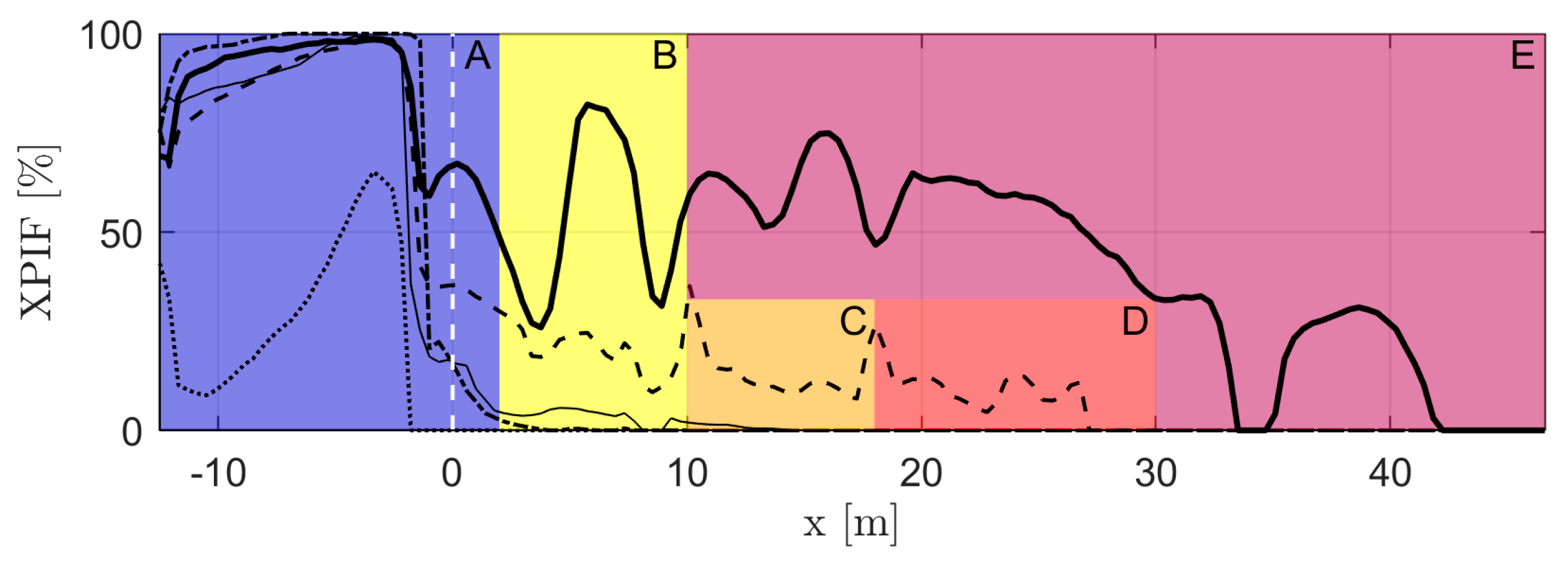
| A | Low | XPIF > 0% for x < 2 m; & XPIF = 0% for x ≥ 2 m | Background hazards |  |
| B | Minimal overwash | XPIF > 0% for x < 10 m; & XPIF = 0% for x ≥ 10 m | Some overwash of outer platform, restricted to rampart. Risk to visitors on the outer platform. |  |
| C | Moderate overwash | XPIF > 0% for x < 10 m; & 0 < XPIF < 33% for x = 10–18 m; & XPIF = 0% for x ≥ 18 m | Overwash reaches Figure Eight Pool. High risk to visitors on the outer platform. Moderate risk to visitors near the Figure Eight Pool, particularly if they are not paying attention to the ocean. |  |
| D | Major overwash | XPIF > 0% for x < 10 m; & 0 < XPIF < 33% for x = 10–18 m; & 0 < XPIF < 33% for x = 18–30 m; & XPIF = 0% for x ≥ 30 m | Overwash extending past Figure Eight Pool. Very high risk to visitors on the outer platform and near the Figure Eight Poolwho may suffer severe injuries from being washed across the platform. |  |
| E | Extreme overwash | XPIF > 0% for x < 10 m; & XPIF > 33% for x = 10–30 m; & XPIF > 0% for x ≥30 m | Overwash extending over the entire platform. Extreme risk to visitors anywhere on the platform. Very high risk of severe injuries from being washed across the platform and potentially washed out to sea. |  |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Power, H.E.; Kinsela, M.A.; Stringari, C.E.; Kendall, M.J.; Morris, B.D.; Hanslow, D.J. Automated Sensing of Wave Inundation across a Rocky Shore Platform Using a Low-Cost Camera System. Remote Sens. 2018, 10, 11. https://doi.org/10.3390/rs10010011
Power HE, Kinsela MA, Stringari CE, Kendall MJ, Morris BD, Hanslow DJ. Automated Sensing of Wave Inundation across a Rocky Shore Platform Using a Low-Cost Camera System. Remote Sensing. 2018; 10(1):11. https://doi.org/10.3390/rs10010011
Chicago/Turabian StylePower, Hannah E., Michael A. Kinsela, Caio E. Stringari, Murray J. Kendall, Bradley D. Morris, and David J. Hanslow. 2018. "Automated Sensing of Wave Inundation across a Rocky Shore Platform Using a Low-Cost Camera System" Remote Sensing 10, no. 1: 11. https://doi.org/10.3390/rs10010011
APA StylePower, H. E., Kinsela, M. A., Stringari, C. E., Kendall, M. J., Morris, B. D., & Hanslow, D. J. (2018). Automated Sensing of Wave Inundation across a Rocky Shore Platform Using a Low-Cost Camera System. Remote Sensing, 10(1), 11. https://doi.org/10.3390/rs10010011