
S-Band Doppler Wave Radar System


Abstract
:
1. Introduction
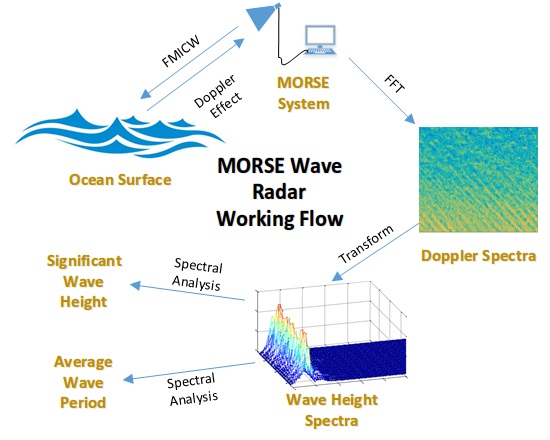
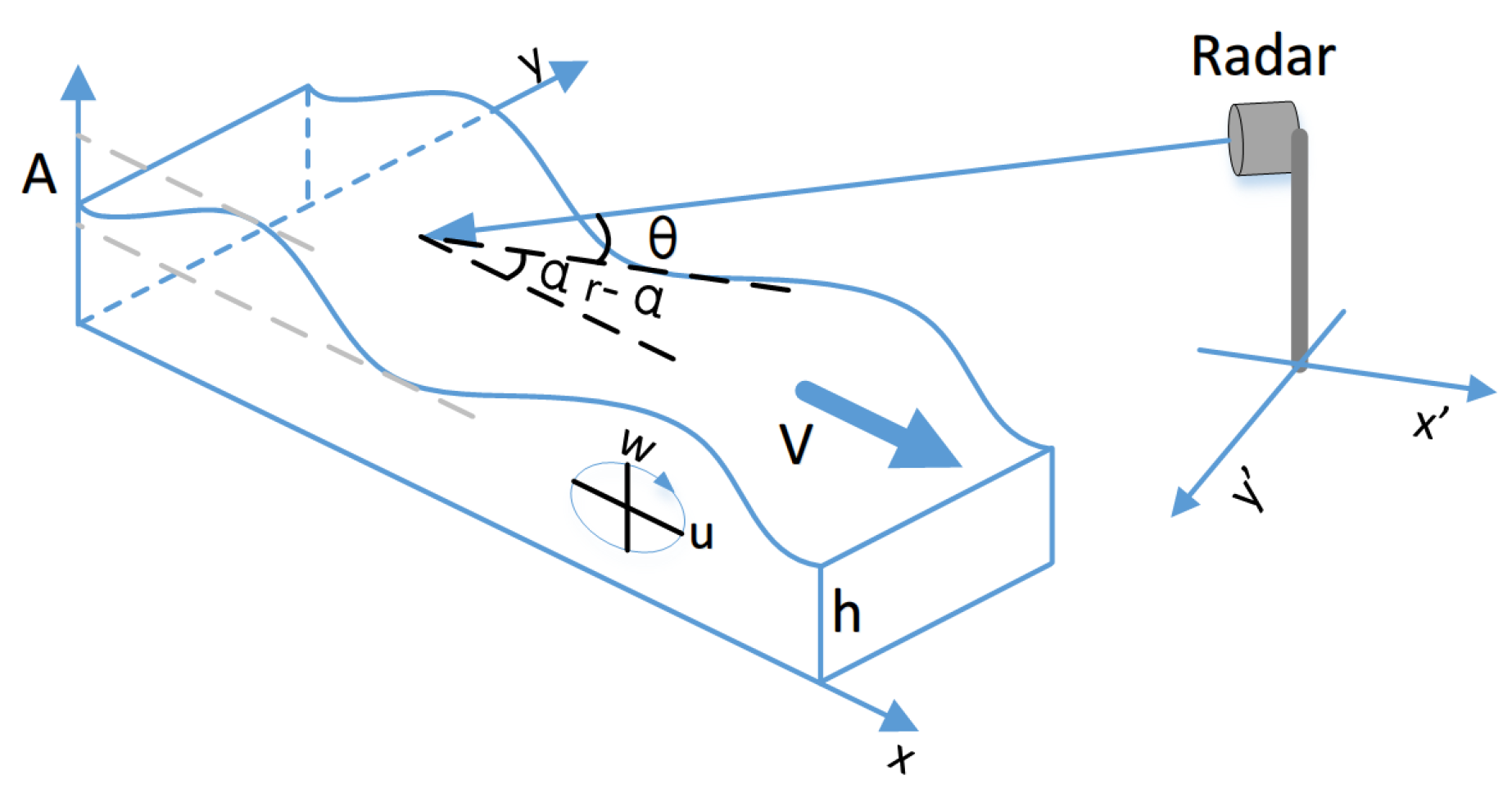
2. Coherent Wave Measuring Method
3. MORSE Radar System
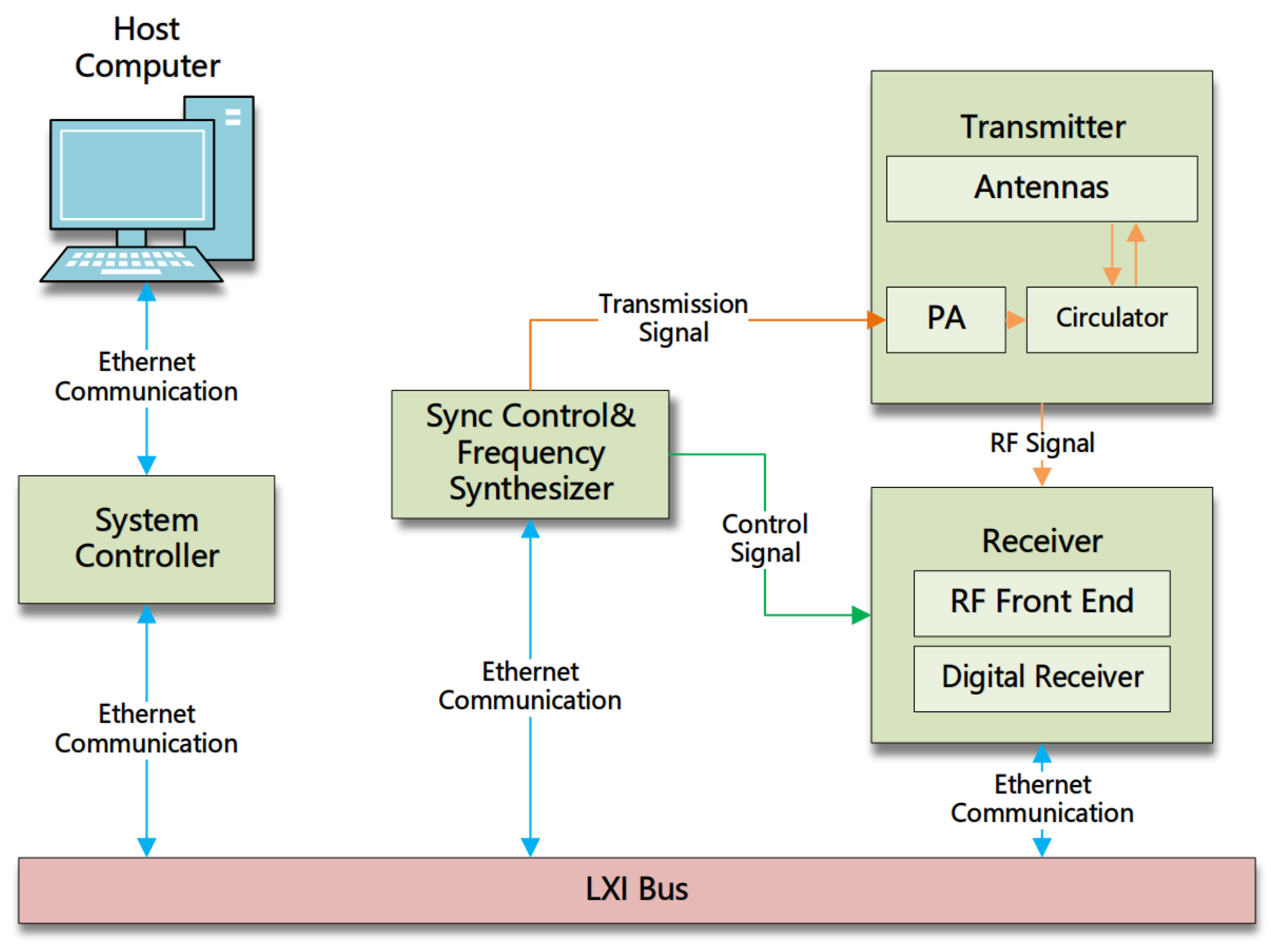
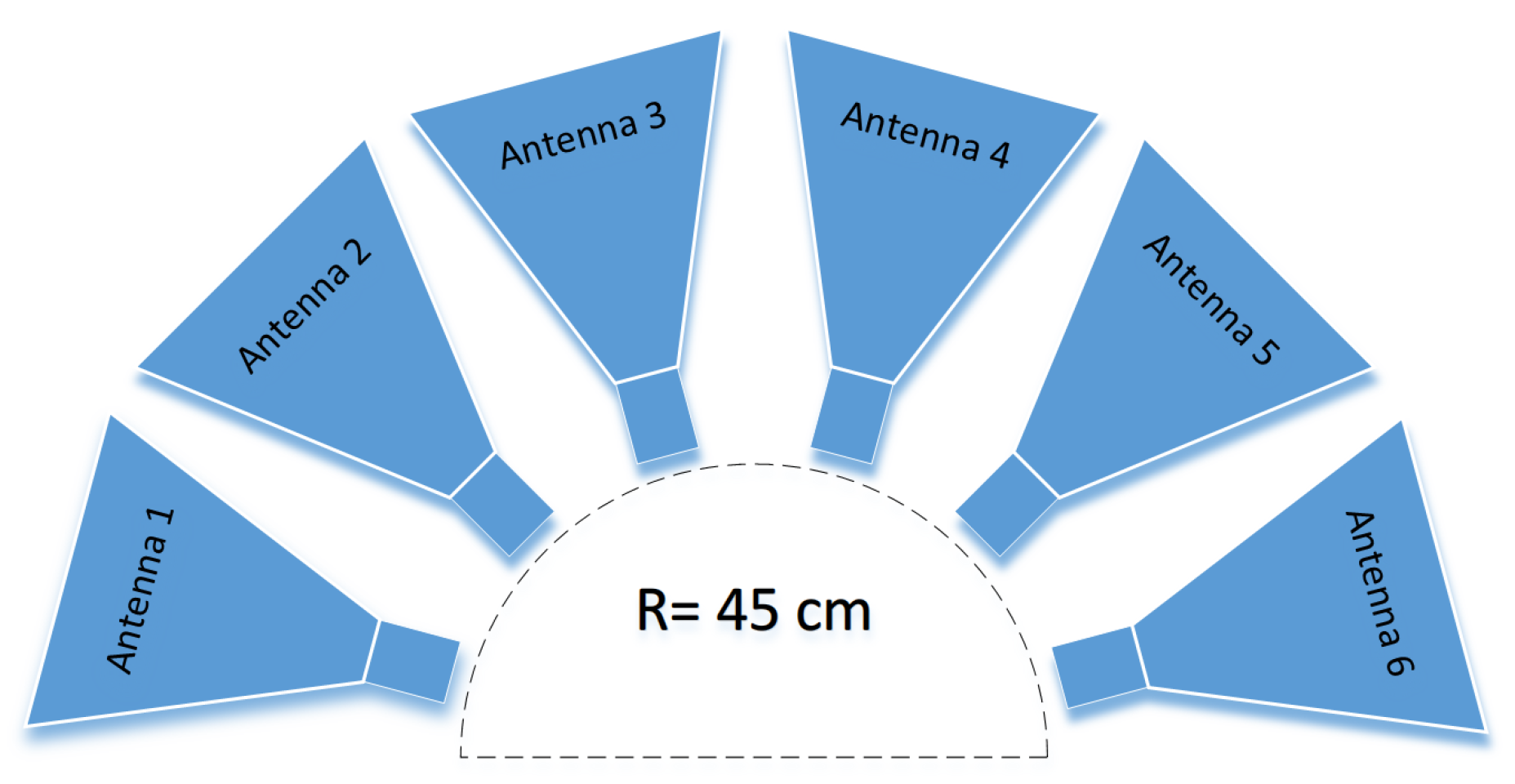
3.1. Radar System Architecture
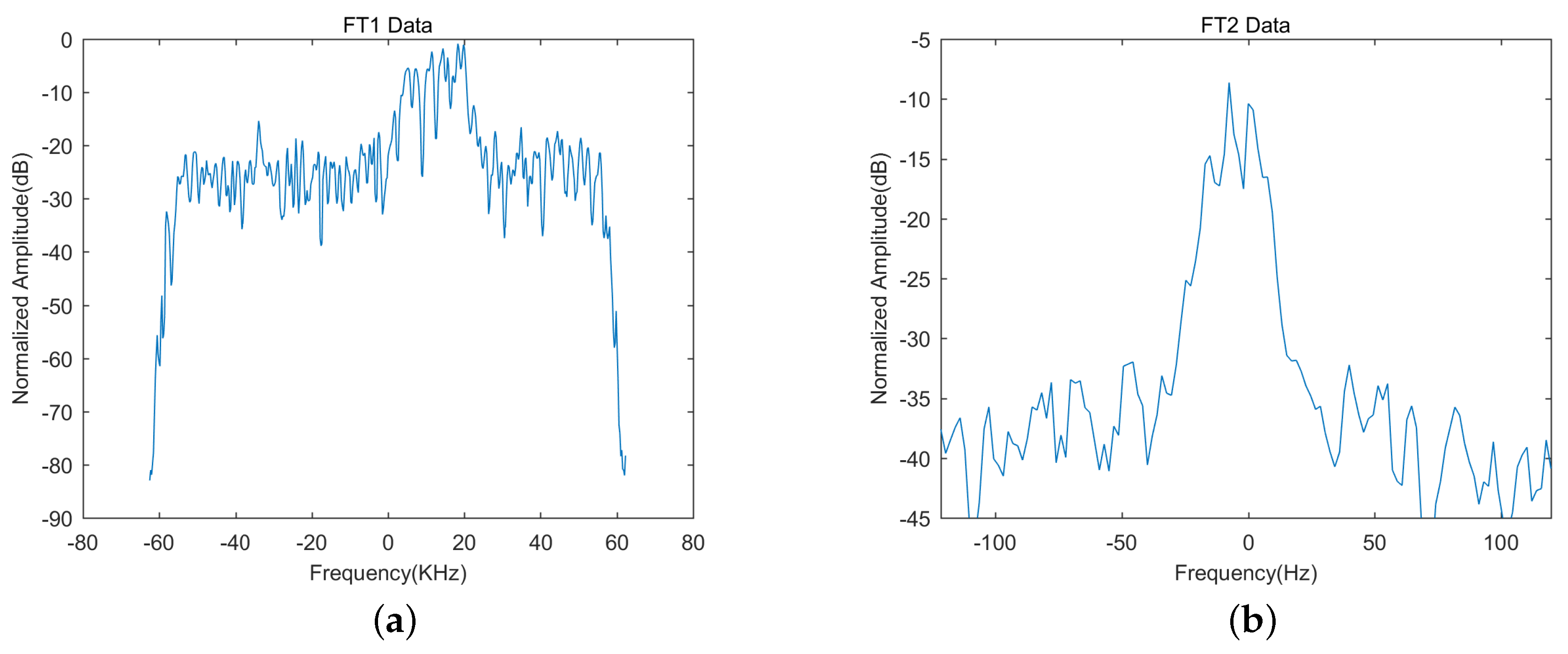
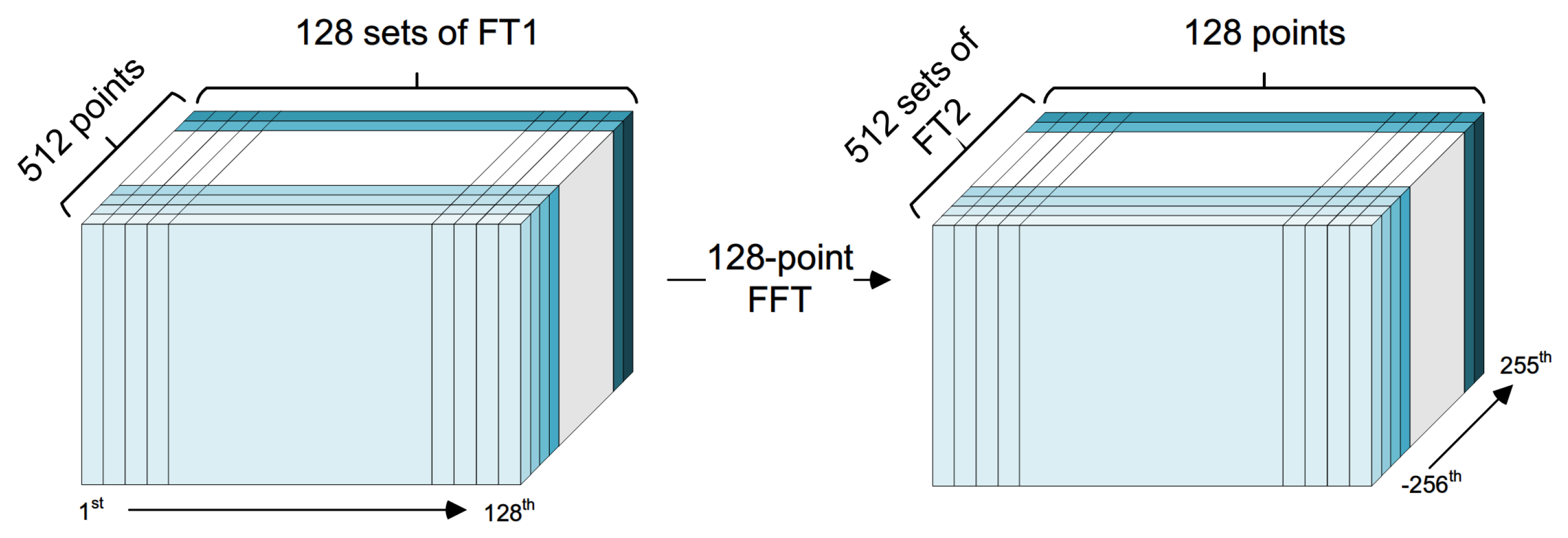
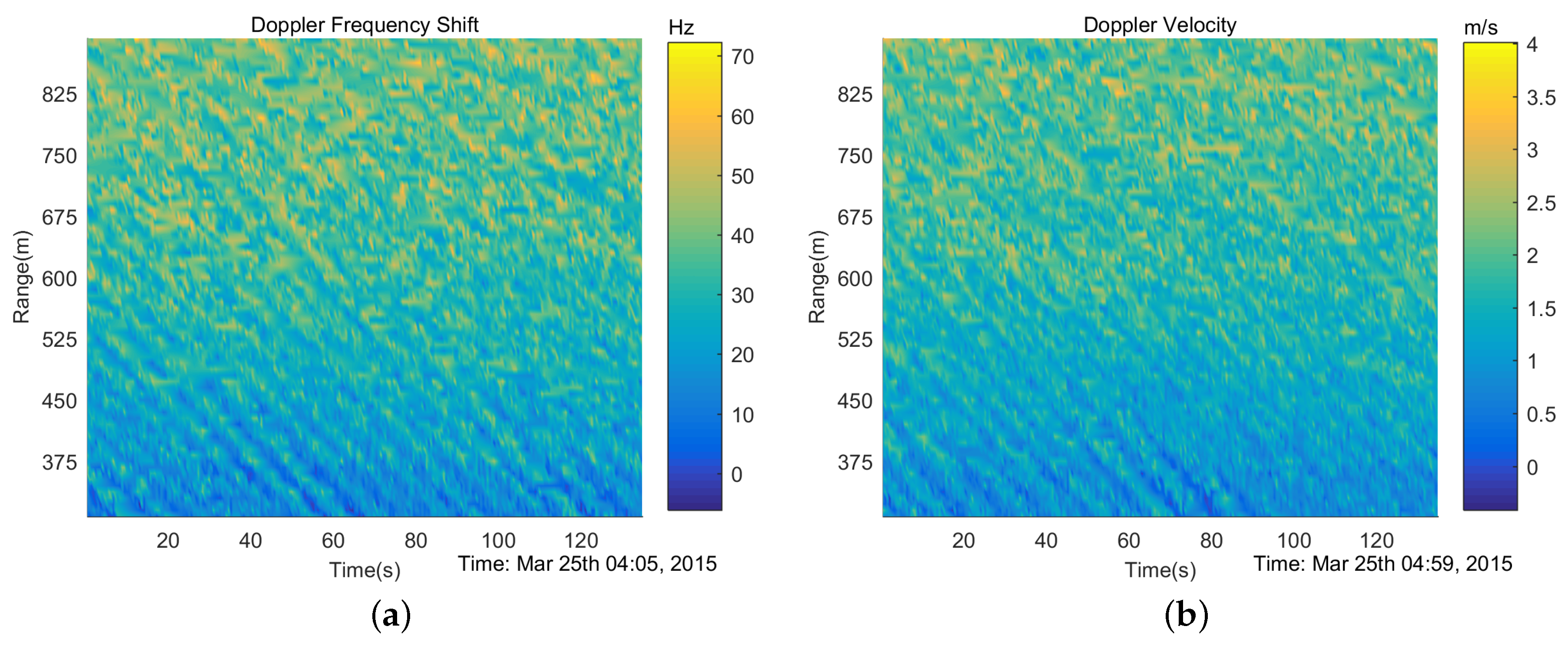
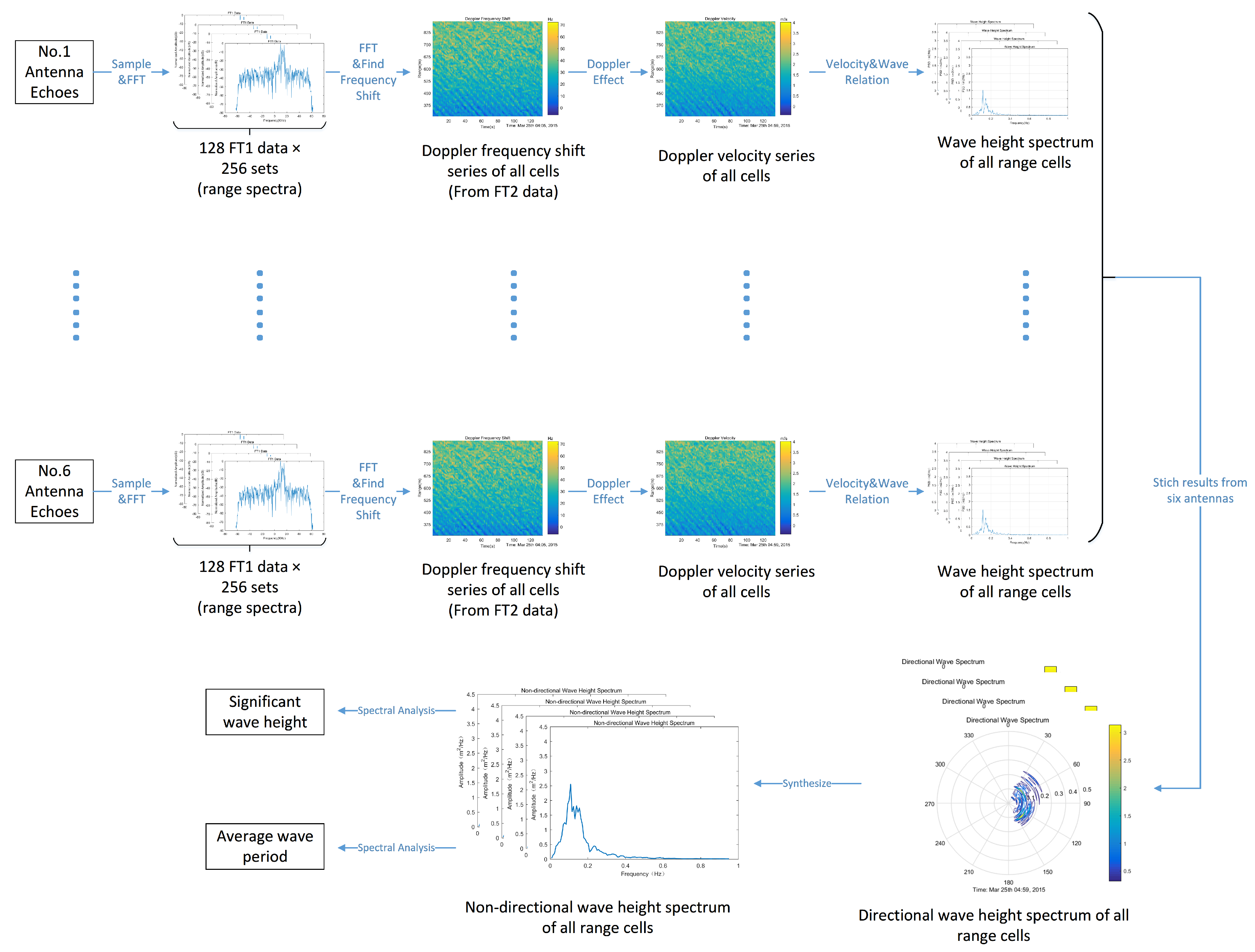
3.2. Algorithm Process
- Calculate the peak SNR of a Doppler power density spectrum. First, we take 15 points on the left edge and 15 points on the right edge of a Doppler power density spectrum. Then, we calculate the average of the two sets of points and consider the lower value as the power of noise . Furthermore, we choose the largest value in the spectrum as the maximum signal power . Eventually the SNR is calculated with the following equation:
- Find the bandwidth. We search for 3 points consecutive with the SNR value lower than the threshold (normally 10 dB) from the location of the maximum value to the left and right. Then the locations of the two set of 3 points are treated as the left and right boundaries of the bandwidth are and
- Extract the Doppler frequency shift. We use the spectrum moment method to calculate the frequency shift as follows:
4. Results Comparison and Analysis
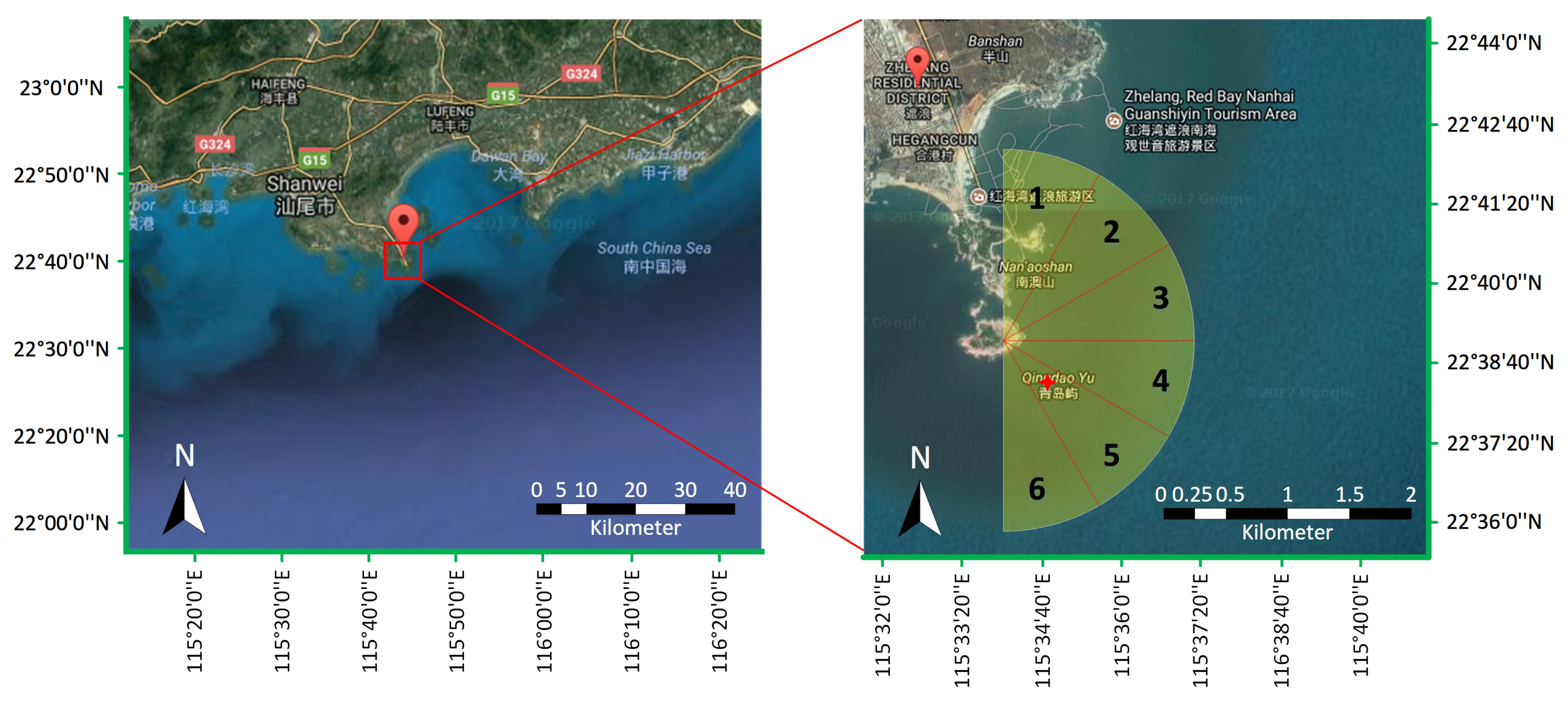
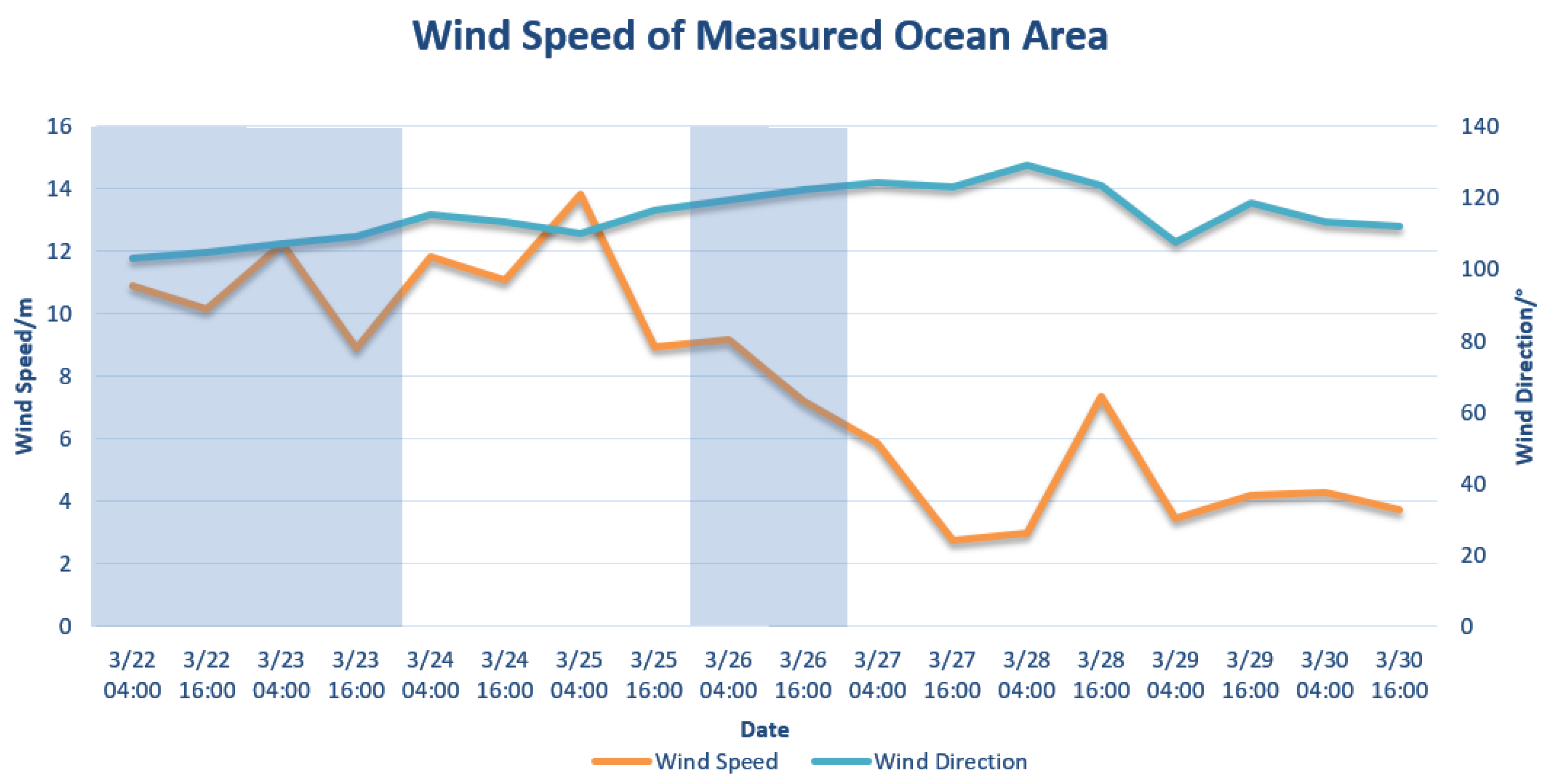
4.1. Experiment Introduction
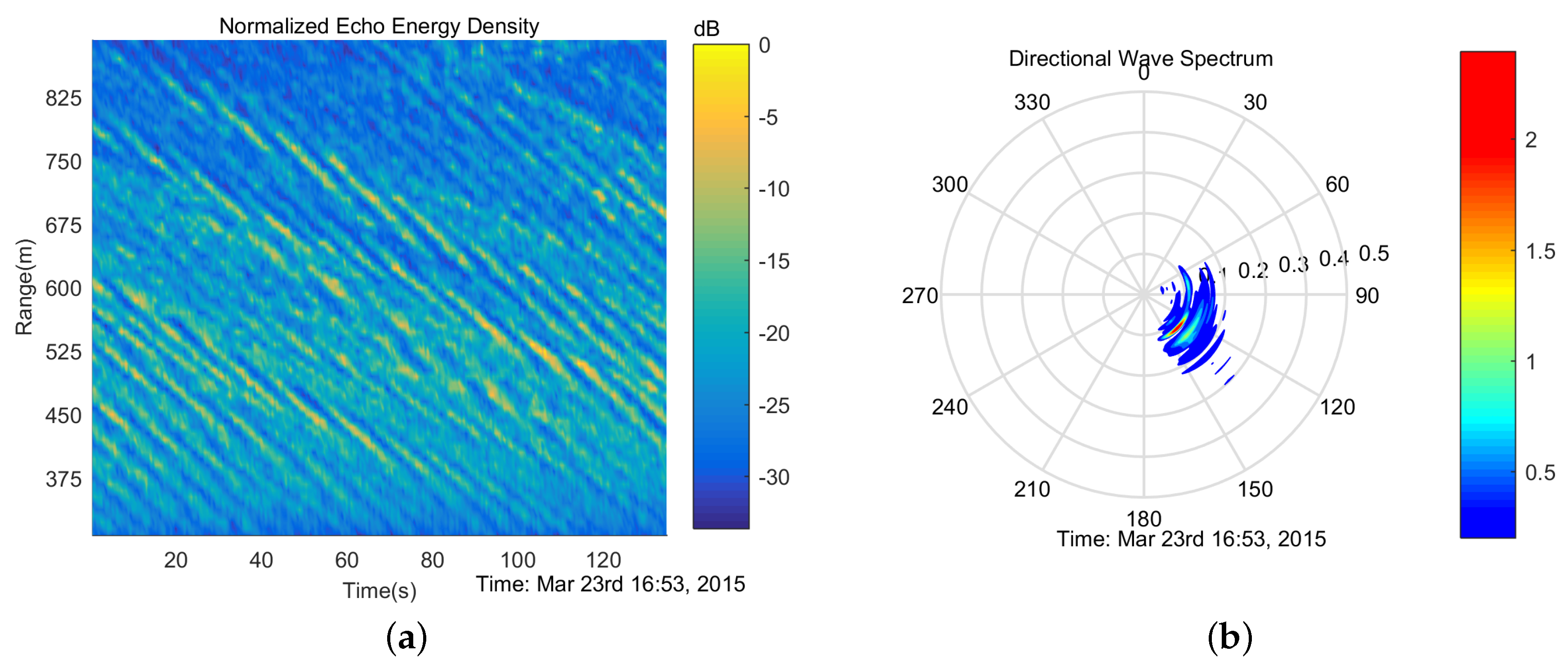
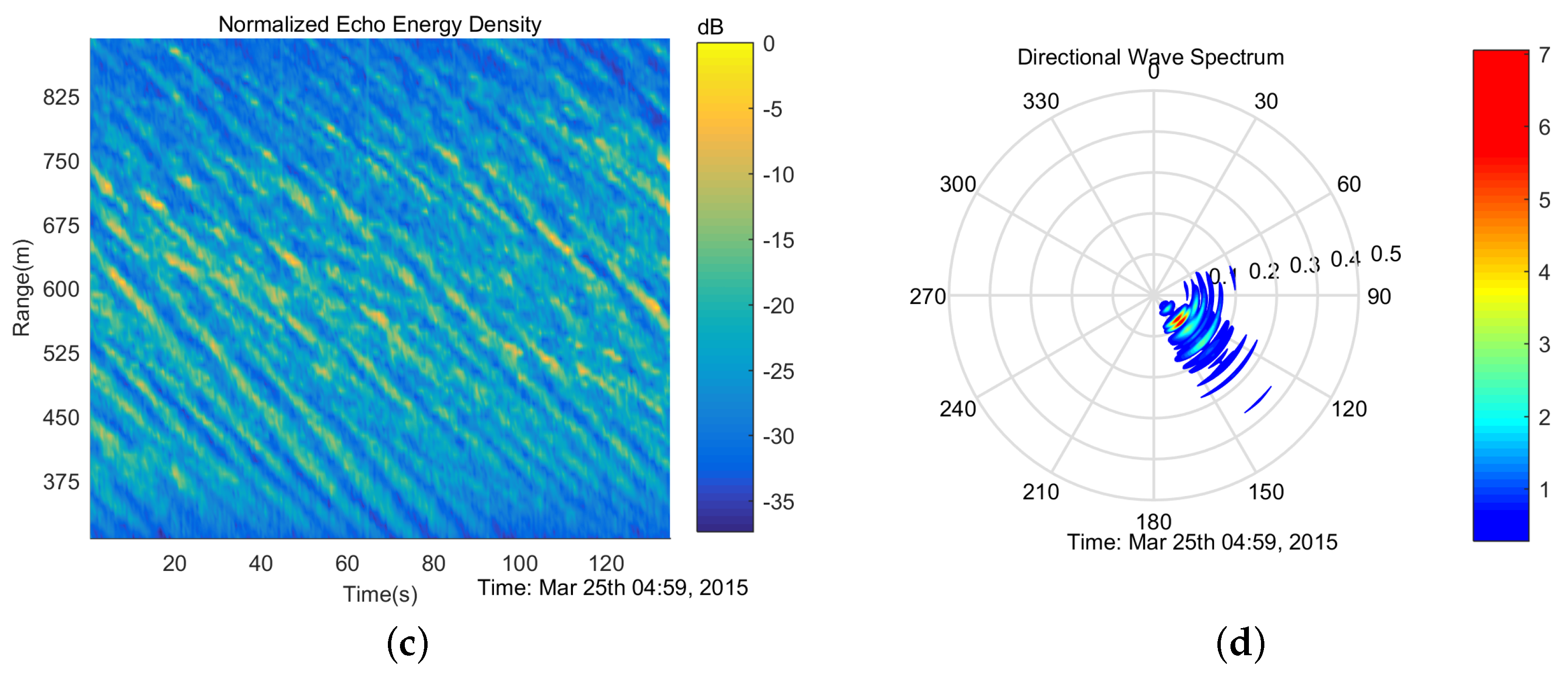
4.2. Directional Wave Height Spectrum
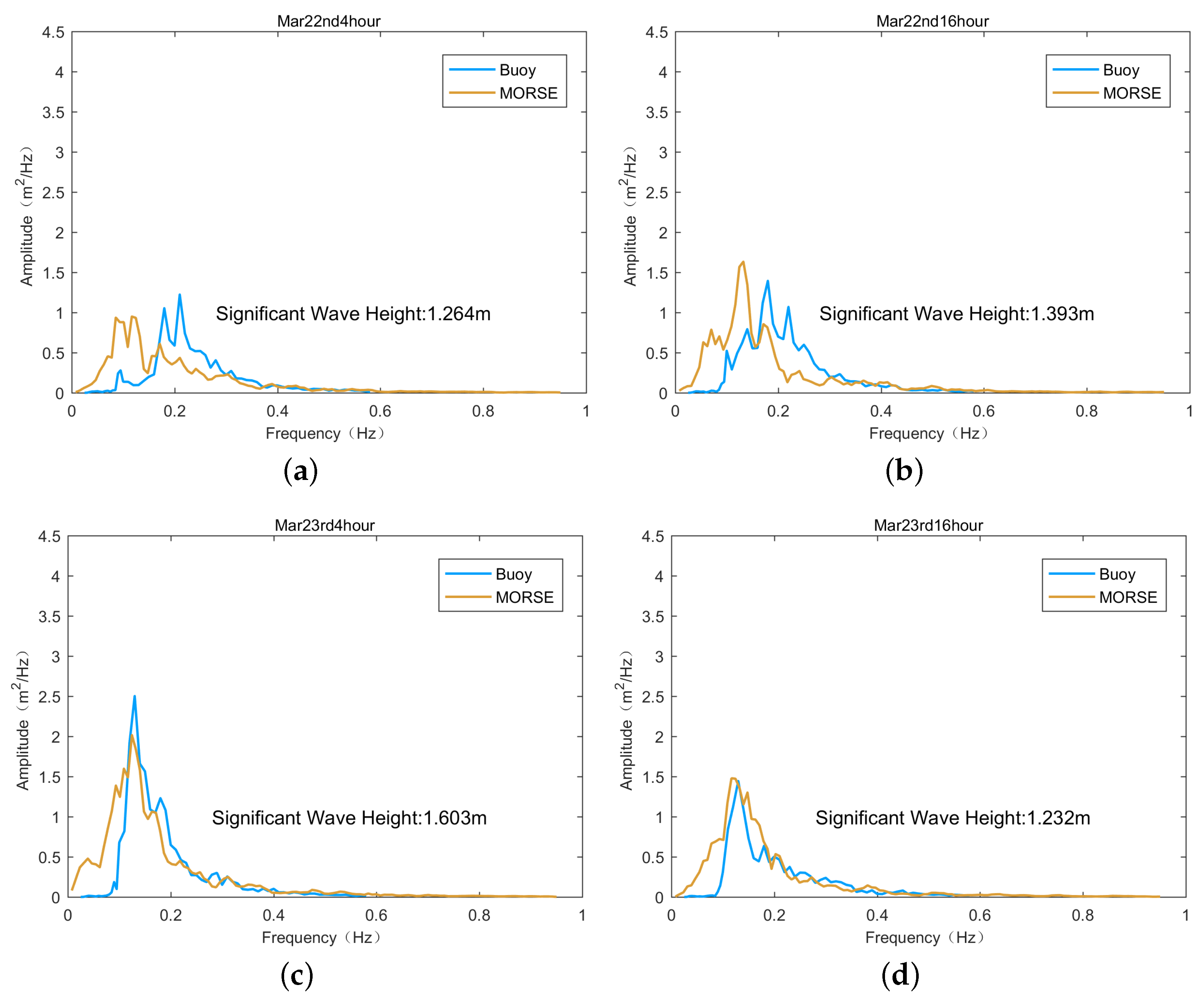
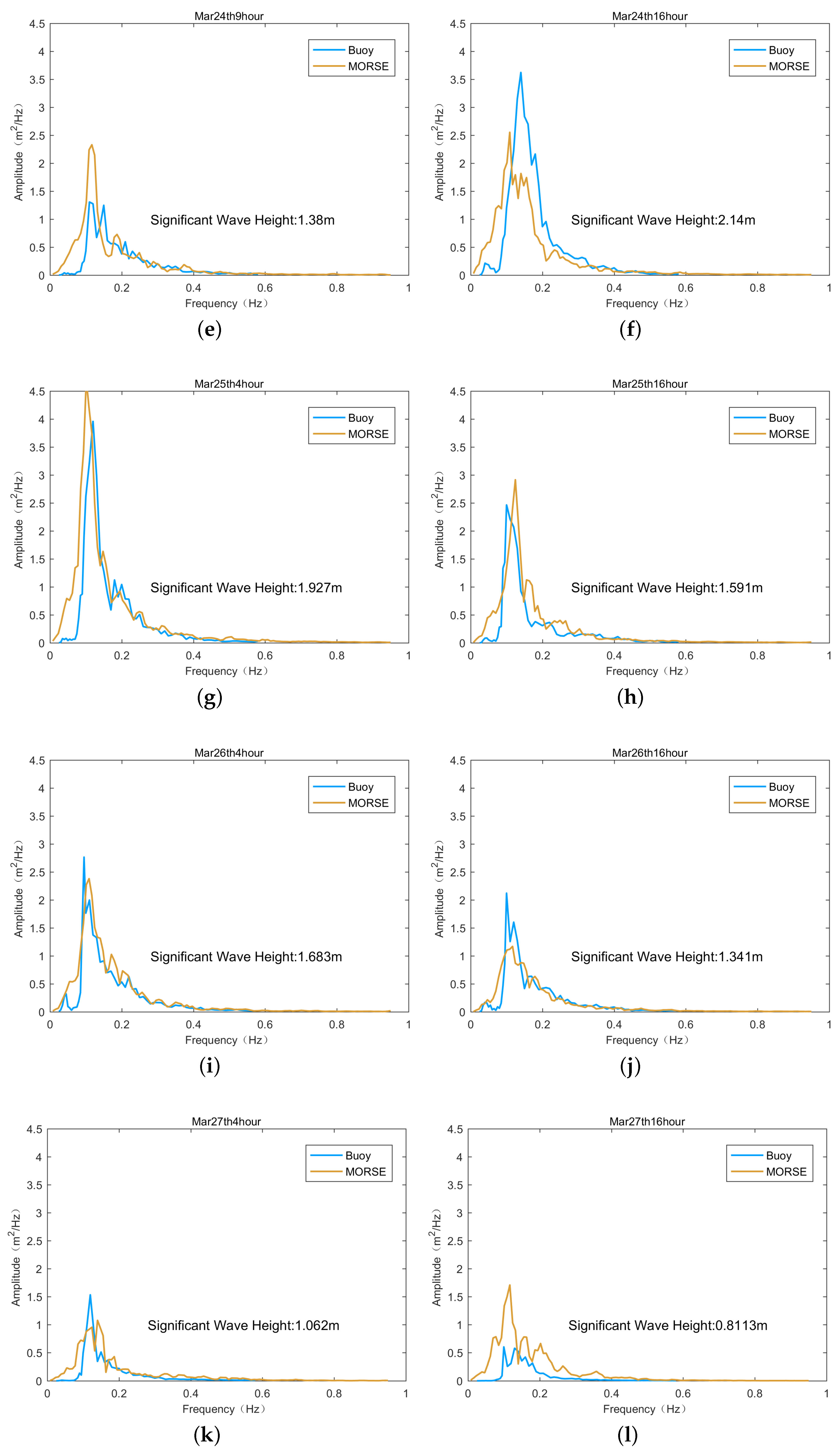
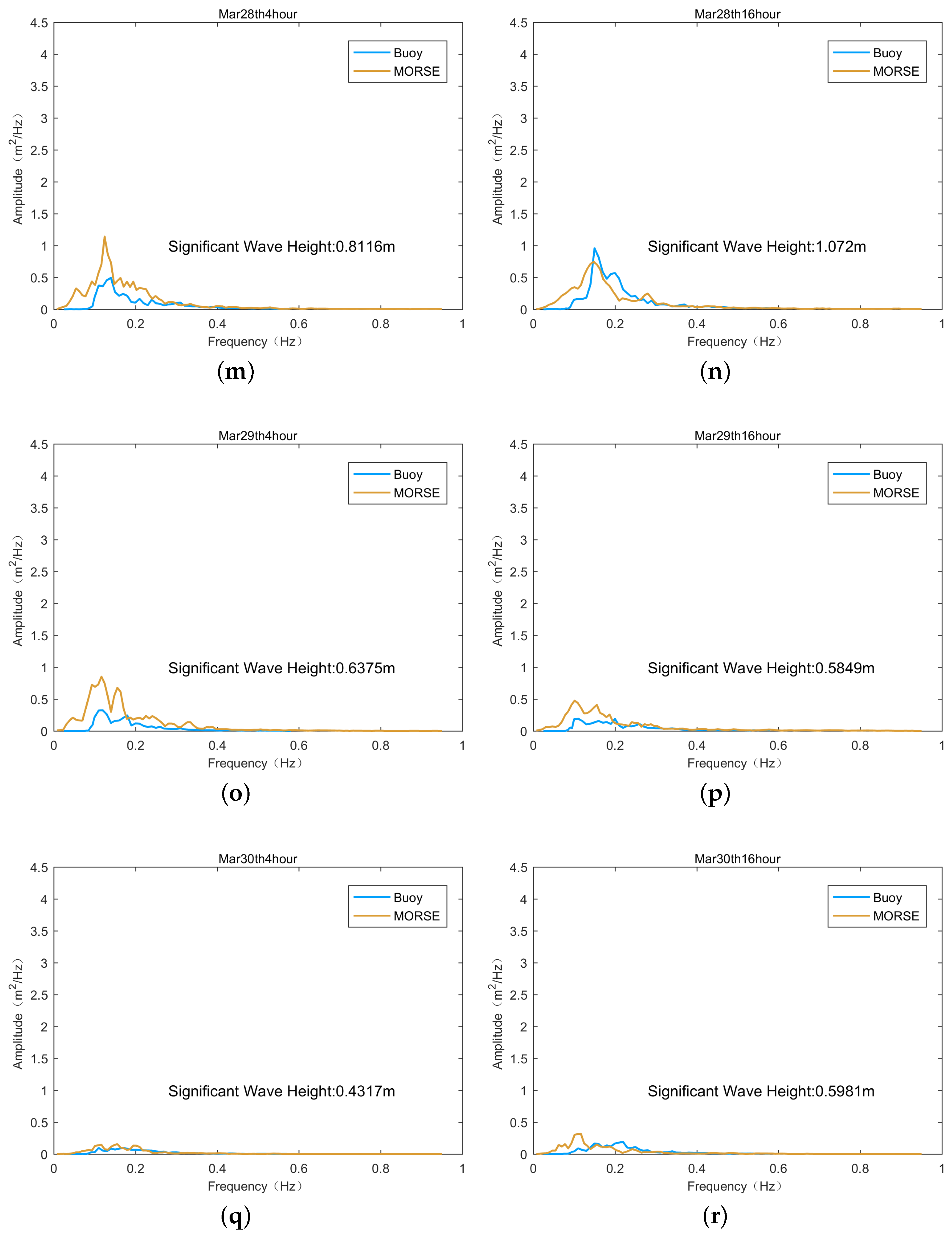
4.3. Non-Directional Wave Height Spectrum Comparison
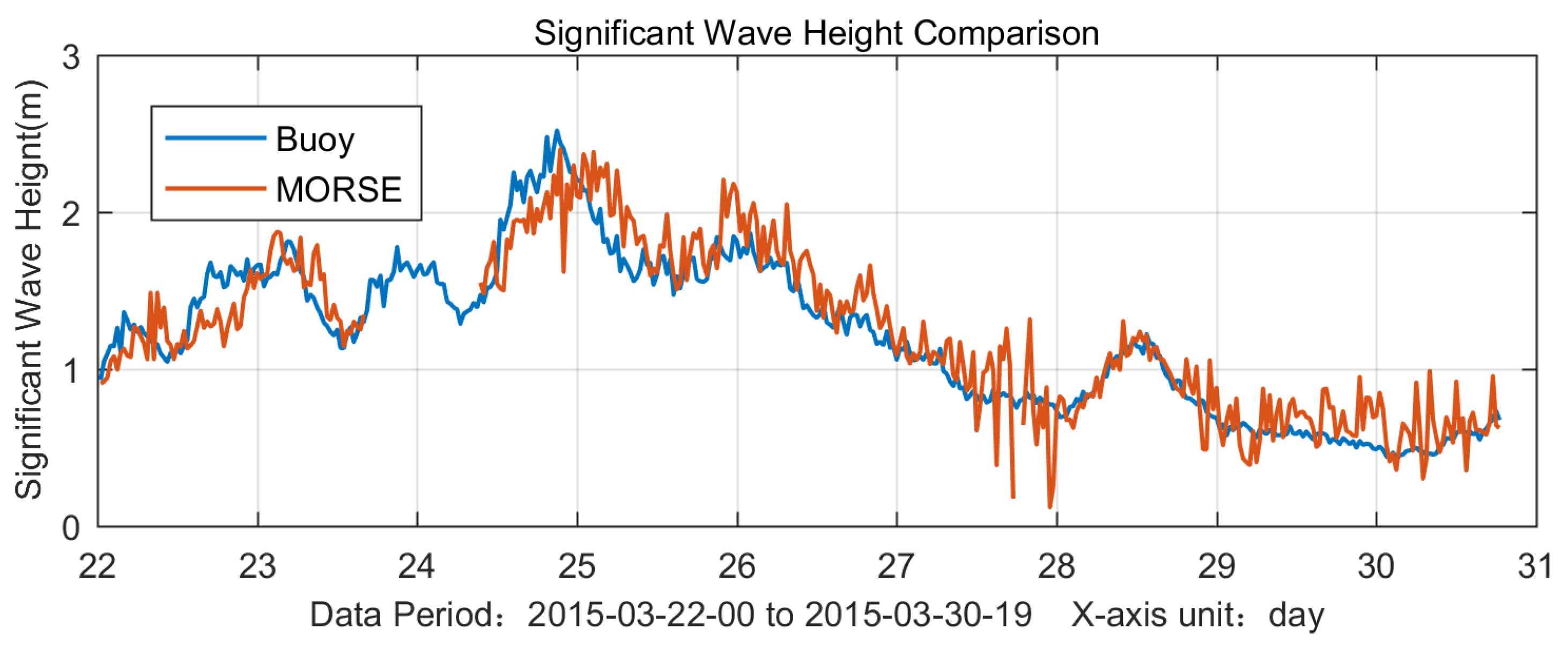
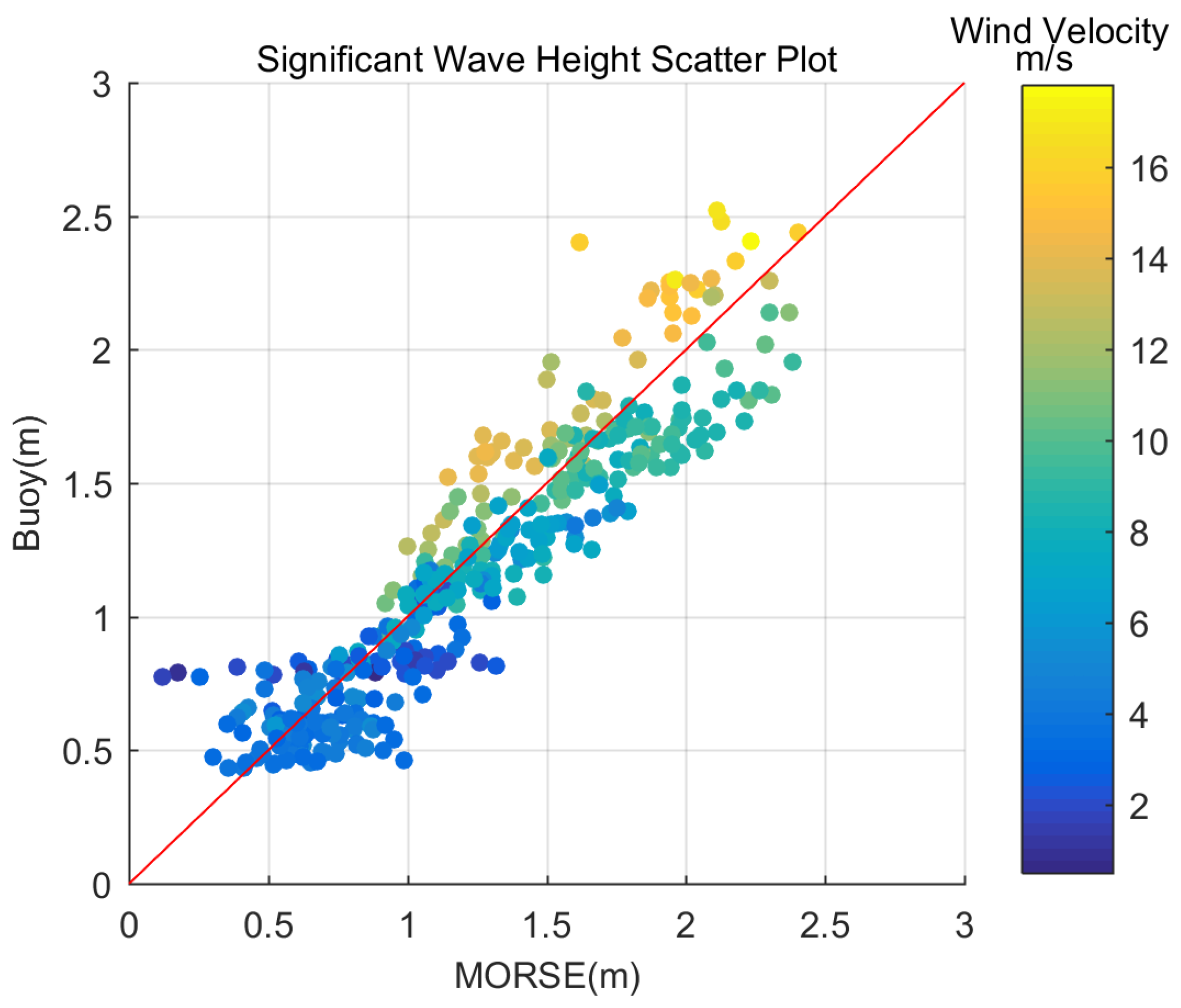
4.4. Significant Wave Height
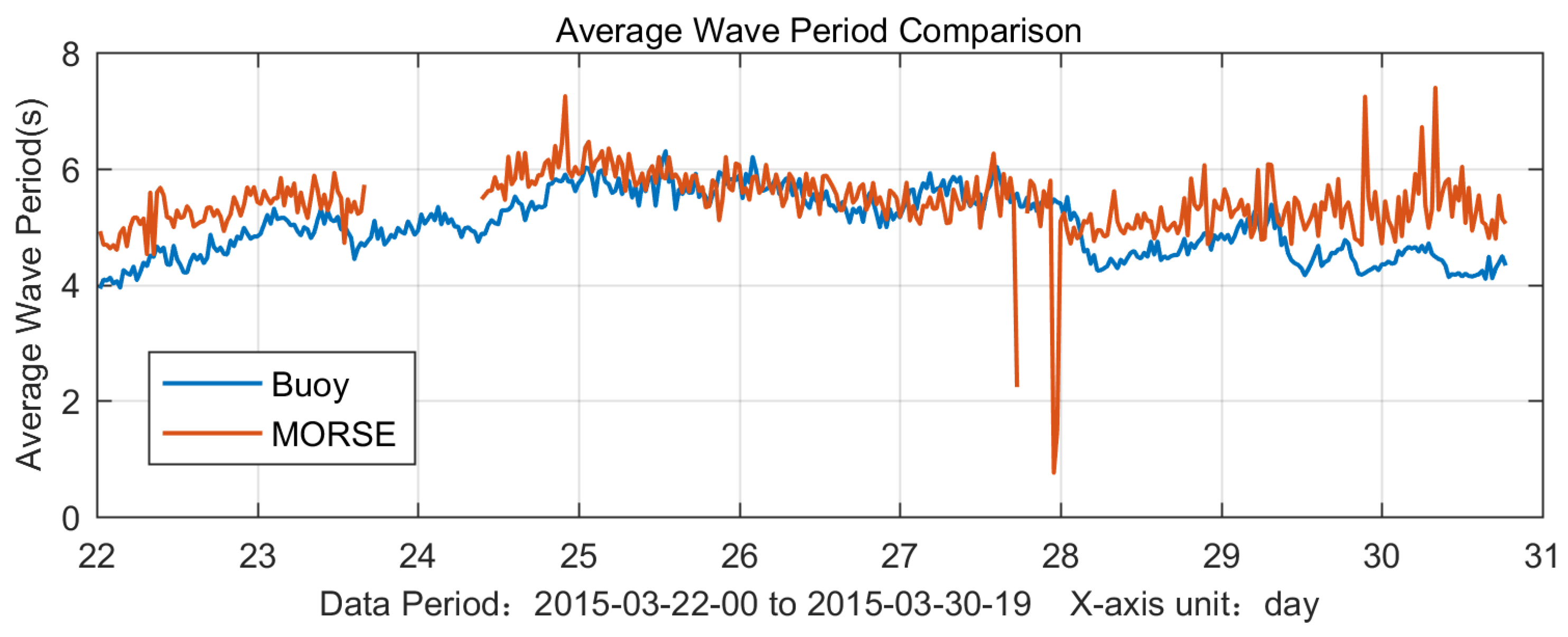
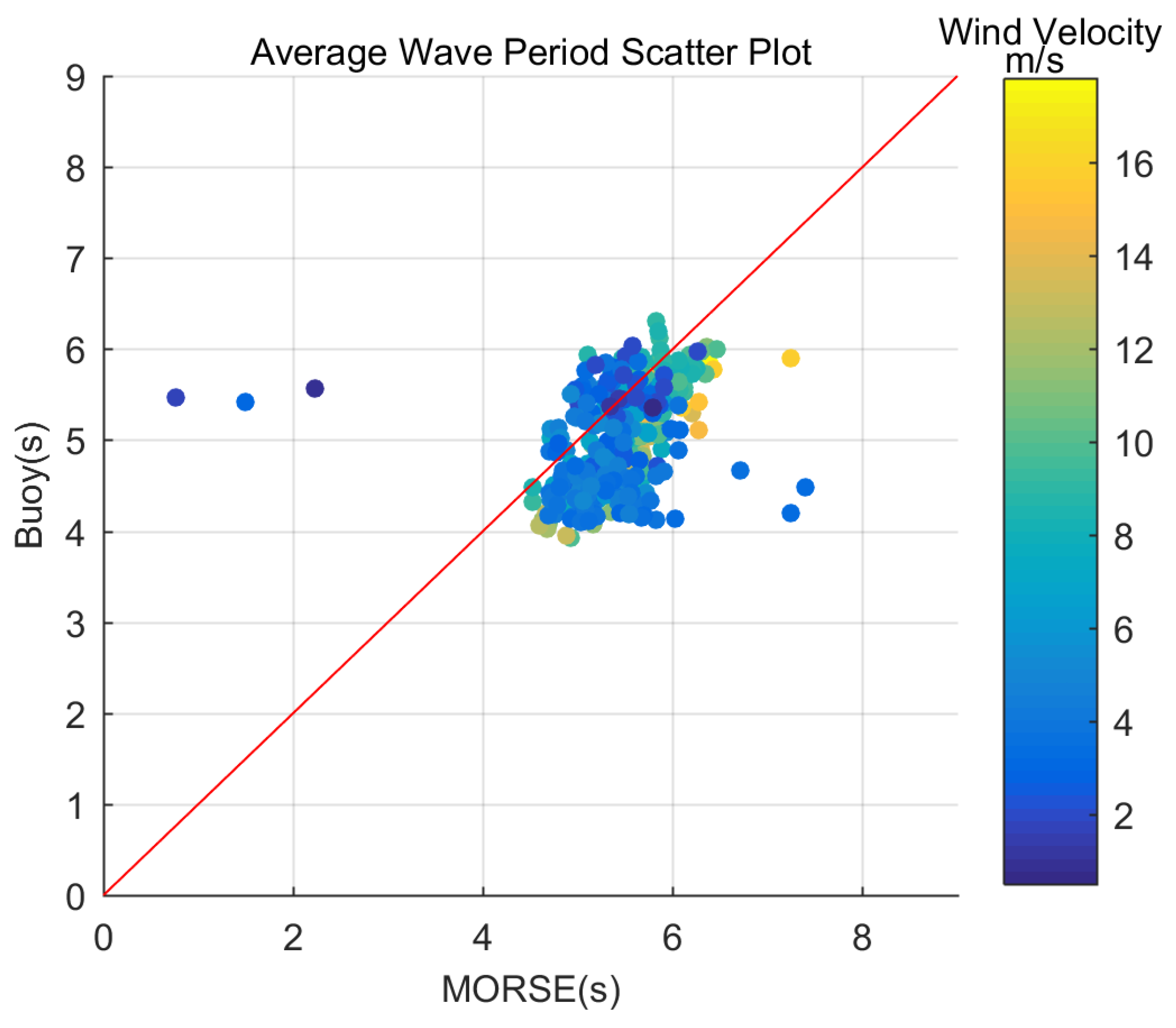
4.5. Average Wave Period
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| 3D-FFT | Three dimensional fast fourier transformation |
| FFT | Fast fourier transformation |
| LS | Least square |
| ILS | Iterative least square |
| DiSC | Dispersive surface classificatory |
| MORSE | Microwave ocean remote sensor |
| LXI | LAN extensions for instrumentation |
| FMICW | Frequency modulated interrupted continuous wave |
| SNR | Signal noise ratio |
| RF | Radio frequency |
| IF | Intermediate frequency |
References
- Young, I.R.; Rosenthal, W.; Ziemer, F. A three-dimensional analysis of marine radar images for the determination of ocean wave directionality and surface currents. J. Geophys. Res. 1985, 90, 1049–1059. [Google Scholar] [CrossRef]
- Nieto Borge, J.; RodrÍguez, G.R.; Hessner, K.; González, P.I. Inversion of marine radar images for surface wave analysis. J. Atmos. Ocean. Technol. 2004, 21, 1291–1300. [Google Scholar] [CrossRef]
- Trizna, D.B. Comparisons of a fully coherent and coherent-on-receive marine radar for measurements of wave spectra and surface currents. In Proceedings of the OCEANS 2010, Seattle, WA, USA, 20–23 September 2010. [Google Scholar]
- Dahl, P.H.; Plant, W.J. Simultaneous acoustic and microwave backscattering from the sea surface. J. Acoust. Soc. Am. 1997, 101, 2583–2595. [Google Scholar] [CrossRef]
- Poulter, E.M.; Smith, M.J.; McGregor, J.A. S-Band FMCW Radar Measurements of Ocean Surface Dynamics. J. Atmos. Ocean. Technol. 2008, 10, 142–149. [Google Scholar] [CrossRef]
- Gangeskar, R. Ocean current estimated from X-band radar sea surface, images. IEEE Trans. Geosci. Remote Sens. 2002, 40, 783–792. [Google Scholar] [CrossRef]
- Senet, C.M.; Seemann, J.; Flampouris, S.; Ziemer, F. Determination of bathymetric and current maps by the method DiSC based on the analysis of nautical X-band radar image sequences of the sea surface. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2267–2279. [Google Scholar] [CrossRef]
- Senet, C.M.; Seemann, J.; Ziemer, F. The near-surface current velocity determined from image sequences of the sea surface. IEEE Trans. Geosci. Remote Sens. 2001, 39, 492–505. [Google Scholar] [CrossRef]
- Shen, C.; Huang, W.; Gill, E.W.; Carrasco, R.; Horstmann, J. An Algorithm for Surface Current Retrieval from X-band Marine Radar Images. Remote Sens. 2015, 7, 7753–7767. [Google Scholar] [CrossRef] [Green Version]
- Ludeno, G.; Reale, F.; Dentale, F.; Carratelli, E.P.; Natale, A.; Soldovieri, F.; Serafino, F. An X-band radar system for bathymetry and wave field analysis in a harbour area. Sensor 2015, 15, 1691–1707. [Google Scholar] [CrossRef] [PubMed]
- Wright, J.W.; Plant, W.J.; Keller, W.C.; Jones, W.L. Ocean wave-radar modulation transfer functions from the West Coast Experiment. J. Geophys. Res. 1980, 85, 4957–4966. [Google Scholar] [CrossRef]
- Plant, W.; Keller, W.; Cross, A. Parametric dependence of ocean wave-radar modulation transfer functions. J. Geophys. Res. 1983, 88, 8747–8756. [Google Scholar] [CrossRef]
- Rozenberg, A.C. Measurement of the sea surface-radar signal modulation transfer fuction at 3-cm wavelength. Radiophys. Quant. Electron. 1990, 33, 1–8. [Google Scholar] [CrossRef]
- Keller, W.; Plant, W.; Johnson, J. Microwave measurement of sea surface velocities from pier and aircraft. In Proceedings of the OCEANS 82, Washington, DC, USA, 20–22 September 1982. [Google Scholar]
- Plant, W.J.; Keller, W.C. Evidence of Bragg scattering in microwave Doppler spectra of sea return. J. Geophys. Res. 1990, 95, 16299–16310. [Google Scholar] [CrossRef]
- Poulter, E.; Smith, M.; McGregor, J. Microwave backscatter from the sea surface: Bragg scattering by short gravity waves. J. Geophys. Res. 1994, 99, 7929–7943. [Google Scholar] [CrossRef]
- Smith, M.J.; Poulter, E.M.; McGregor, J.A. Doppler radar measurements of wave groups and breaking waves. J. Geophys. Res. 1996, 101, 14269–14282. [Google Scholar] [CrossRef]
- McGregor, J.A.; Poulter, E.M.; Smith, M.J. Ocean surface currents obtained from microwave sea-echo Doppler spectra. J. Geophys. Res. 1997, 102, 25227–25236. [Google Scholar] [CrossRef]
- McGregor, J.A.; Poulter, E.M.; Smith, M.J. S band Doppler radar measurements of bathymetry, wave energy fluxes, and dissipation across an offshore bar. J. Geophys. Res. 1998, 103, 18779–18789. [Google Scholar] [CrossRef]
- Carrasco, R.; Horstmann, J.; Seemann, J. Significant Wave Height Measured by Coherent X-Band Radar. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5355–5365. [Google Scholar] [CrossRef]
- Wright, J. A new model for sea clutter. IEEE Trans. Antennas Propag. 1968, 10, 217–223. [Google Scholar] [CrossRef]
- Hara, T.; Plant, W.J. Hydrodynamic modulation of short wind-wave spectra by long waves and its measurement using microwave backscatter. J. Geophys. Res. 1994, 99, 9768–9784. [Google Scholar] [CrossRef]
- Hara, T.; Hanson, K.A.; Bock, E.J.; Uz, B.M. Observation of hydrodynamic modulation of gravity-capillary waves by dominant gravity waves. J. Geophys. Res. 2003, 108, 9768–9784. [Google Scholar] [CrossRef]
- Branch, R.; Plant, W.J.; Gade, M. Relating microwave modulation to microbreaking observed in infrared imagery. IEEE Geosci. Remote Sens. Lett. 2008, 5, 364–367. [Google Scholar] [CrossRef]
- Fabbro, V.; Bourlier, C.; Combes, P.F. Forward propagation modeling above Gaussian rough surfaces by the parabolic shadowing effect. Prog. Electromagn. Res. 2006, 58, 243–269. [Google Scholar] [CrossRef]
- Fan, L.; Chen, Z.; Jin, Y.; Zhao, C. Inverse algorithm of ocean wave patameters for microwave Doppler radars. J. Huazhong Univ. Sci. Technol. 2012, 40, 21–24. [Google Scholar]
- Chen, Z.; Fan, L.; Zhao, C.; Jin, Y. Ocean wave directional spectrum measurement using microwave coherent radar with six antennas. IEICE Electron. Express 2012, 9, 1542–1549. [Google Scholar] [CrossRef]
- Plant, W.J. The ocean wave height variance spectrum: Wavenumber peak versus frequency peak. J. Phys. Oceanogr. 2009, 39, 2382–2383. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wave Height Spectrum | Range | Resolution | Update Time |
|---|---|---|---|
| 0.01–0.5 Hz, 0–360 | 0.01 Hz/ | 2.5 min/Sector, 3 min/Avg | |
| Wave Parameters | Range | Resolution | MSE |
| Wave Height | 0–30 m * | 0.1 m | |
| Wave Period | 3–30 s | 0.1 s | |
| Wave Direction | 0–360 | ||
| Range Resolution | 5/7.5/15 m Variable | ||
| Detecting Range | 5 km | ||
| Polarization | Wavelength | Antenna Beam Width | Doppler Speed Range |
| VV | 10.5 cm | ±8.6 m | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Wang, Z.; Chen, X.; Zhao, C.; Xie, F.; He, C. S-Band Doppler Wave Radar System. Remote Sens. 2017, 9, 1302. https://doi.org/10.3390/rs9121302
Chen Z, Wang Z, Chen X, Zhao C, Xie F, He C. S-Band Doppler Wave Radar System. Remote Sensing. 2017; 9(12):1302. https://doi.org/10.3390/rs9121302
Chicago/Turabian StyleChen, Zezong, Zihan Wang, Xi Chen, Chen Zhao, Fei Xie, and Chao He. 2017. "S-Band Doppler Wave Radar System" Remote Sensing 9, no. 12: 1302. https://doi.org/10.3390/rs9121302
APA StyleChen, Z., Wang, Z., Chen, X., Zhao, C., Xie, F., & He, C. (2017). S-Band Doppler Wave Radar System. Remote Sensing, 9(12), 1302. https://doi.org/10.3390/rs9121302