Data from Experimental Version 1.8 of the ESA SST CCI project [
24] have been used to develop and test the method presented in this paper. These data have been extracted from a multi-sensor match-up database (MMD) [
25] containing collocated swath or level 2 pre-processed (L2P) data from the (A)ATSR series of satellites and in situ observations from a variety of platforms. The in situ observations and satellite retrievals are briefly described in this section.
2.1. In Situ Data
In situ data from the MMD was originally been extracted from the Met Office Hadley Centre Integrated Ocean Database (HadIOD) [
26]. These were, in turn, extracted from Release 2.5 of the International Comprehensive Ocean and Atmosphere Data Set (ICOADS2.5; [
9]) and the Hadley Centre EN4 dataset [
27]. ICOADS2.5 and EN4 contain data from common sources, such as the World Ocean Database (WOD) [
28] Where an observation exists in both ICOADS2.5 and EN4, the observation from EN4 was retained in preference [
26]. Whilst the match-up database contains observations from many different platforms, only those match-ups containing drifting buoy, GTMBA and near surface (<5 m) Argo data were used in this study. Temperature observations from ships, sub-surface measurements and extra-tropical moorings were been used due to either quality (ships [
29], extra-tropical moorings [
30]) or representativeness issues (sub-surface).
The drifting buoy temperature observations from HadIOD were extracted from ICOADS2.5 [
9]. The data within ICOADS2.5 came from a number of overlapping sources, with observations duplicated between the different sources. These duplicates were removed by ICOADS2.5 processing [
9]. Prior to ingestion into HadIOD, the observations also underwent quality control following Rayner et al. [
4], with implausible values and gross errors in location (time and space) and temperature flagged. Additionally, the observations had a platform level quality check applied prior to ingestion into HadIOD, with the quality of the observations made by individual buoys tracked over time through comparison with a satellite-based analysis [
31]. The GTMBA data underwent the same processing as the drifting buoy data and came from either ICOADS2.5 or EN4. As noted above, where a duplicate was found, the EN4 data were retained in preference.
The surface Argo data within HadIOD were extracted from EN4 [
27]. As with ICOADS2.5, EN4 contains data from a number of sources, including from the Argo Global Data Assembly Centre (GDAC) [
23], the World Ocean Database (WOD) [
28], and the Global Temperature Salinity Profile Programme. As part of the EN4 processing, duplicate temperature profiles were identified and removed, with the Argo GDAC data kept in preference to the other sources. Prior to ingestion into EN4 the profiles undergo additional quality control checks, including
inter alia: gray list checks, parameter range checks, profile checks (spikes, steps, etc.), bathymetry, and depth checks. Full details on the duplicate elimination and quality control can be found in Good et al. [
27] and Ingleby and Huddleston [
32].
The primary characteristics of the drifting buoy, GTMBA and near surface Argo data are summarized in
Table 1. The uncertainty values listed are those as reported by Atkinson et al. [
26]. Also listed are validation statistics for the initial version of the ESA SST CCI ATSR global analysis as reported by Merchant et al. [
18]. The drifting buoy observations are the most numerous and closest to the surface but have higher uncertainties compared to the other sources. Alternative estimates of the uncertainty in the drifter data ranges from ~0.2 K [
33] to ~0.5 K [
34]. The manufacturer has little impact on the quality of drifting buoy data [
30]. The GTMBA data have smaller uncertainties compared to the drifting buoy data but are limited to the tropics and at a slightly greater depth. The near surface Argo measurements have the smallest uncertainty due to measurement errors but are made at the greatest depth compared to the other sources, and with far fewer observations available. Overall, based on the validation results listed in
Table 1, the expected error variance is broadly equal across the three different in situ platforms.
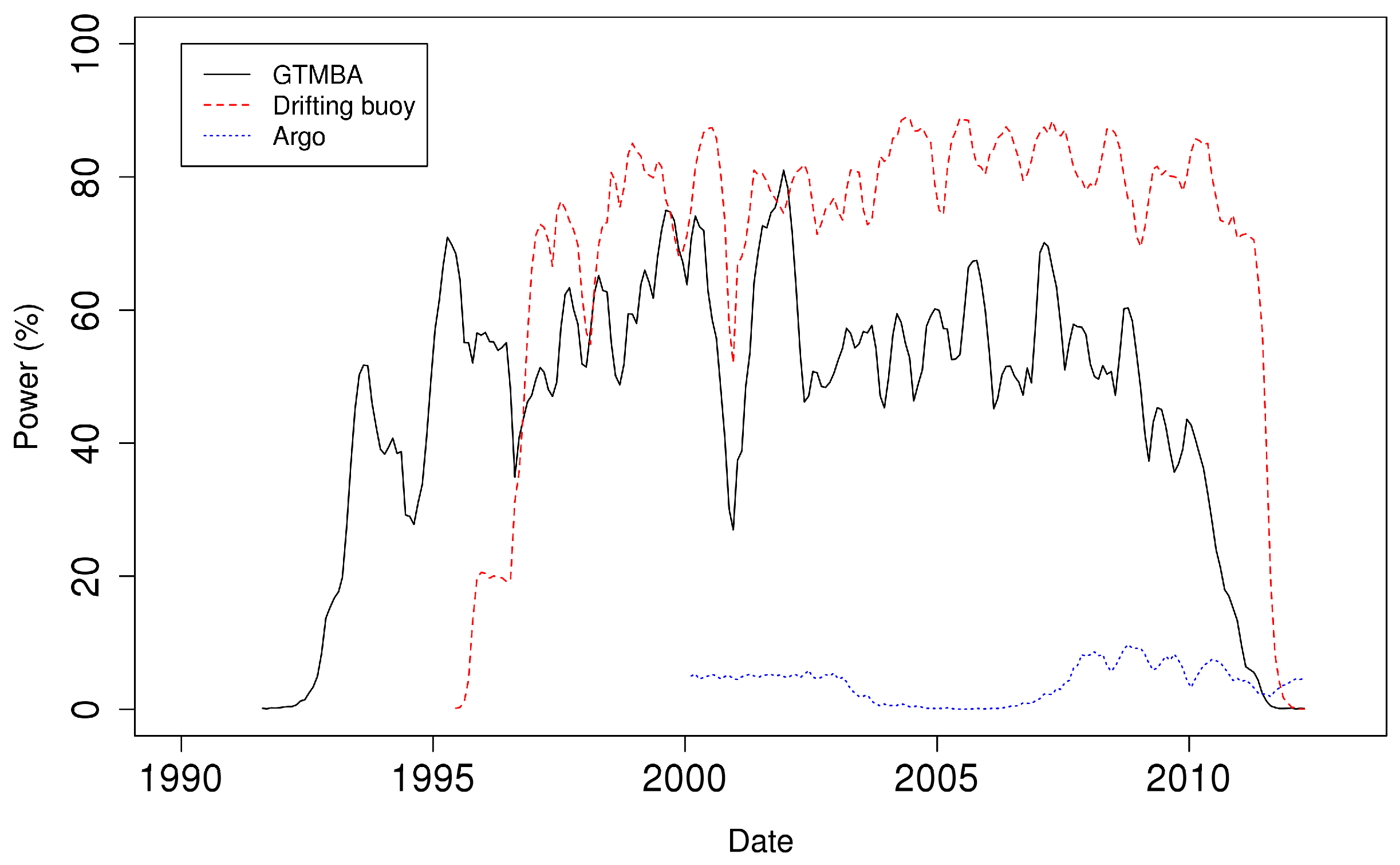
There have been few technological changes to the GTMBA, drifting buoy and Argo observations that will have significantly impacted the quality of the data over the study period. However, the density and distribution of the observing systems has changed significantly. There was a marked increase in the number of drifting buoy observations in the late 1990s and early 2000s. The number of available match-ups are shown in
Figure 1. There has also been a spatial evolution in the location of the data. For example, prior to ~2000, drifting buoy observations of the SST tended to be poleward of the tropics, with very few observations within 10° of the equator.
Figure 2 shows the percentage of drifting buoy match-ups available from the MMD in a given 5° latitude band calculated annually. The lack of tropical observations prior to 2000 was clearly seen.
2.2. Satellite Data
The match-up database from the ESA SST CCI project used within this study contained level 2 pre-processed (L2P) data from experimental version 1.8 of the project for the ATSR series of sensors. At the time of analysis, AVHRR data from v1.8 were unavailable. These will be available in subsequent versions. The algorithms used to generate the L2P data are summarized by Merchant et al. [
18] and fully described in Merchant [
24]. A general description of the (A)ATSR characteristics is given by Merchant et al. [
35]. A brief summary is given in this section.
The L2P data contain estimates of the skin temperature (e.g., [
36]) from a single swath with a resolution of 1 km, a swath width of 500 km, a 3-day repeat cycle and a local equator crossing time of either 1030 am/pm (ATSR and ATSR2) or 1000 am/pm (AATSR). For the ATSR sensors, the skin temperature estimates are based on the linear combination of 2 or 3 brightness temperature channels [
24] following the ARC project [
13,
14]. The number of channels depends on whether the retrievals are for the daytime or nighttime and the satellite (See
Table 2). The coefficients used in the linear combination of channels have been derived using radiative transfer modeling and atmospheric profiles from the ERA 40 reanalysis model. Cloud screening, trace gas atmospheric profiles and the impact of aerosols are accounted for as part of the retrieval process. Full details are given in Merchant [
24]. Consistency between ATSR sensors was achieved using the overlap between the sensors and by referencing the brightness temperatures of all channels and sensors to be consistent with the 3.7 and 11
m channels of the AATSR (e.g., [
35]).
In addition to the skin temperature, the L2P files contain estimates of the sub-skin temperature and water temperature at different depths in the near surface ocean (0.2 m, 1 m and 5 m) adjusted to 1030 am/pm local time. The sub-skin temperatures were estimated using the Fairall et al. [
15] model to adjust the skin temperatures to sub-skin temperatures. These were then adjusted to bulk temperatures using the model of Kantha and Clayson [
16]. Both models were forced using the output from the ERA Interim Reanalysis model [
37] and were used to adjust the temperatures to be representative of 1030 am/pm local time [
24].
A number of events may impact on the quality of the (A)ATSR based retrievals. These are summarized in
Figure 2 of Merchant et al. [
35]. Shortly before the launch of the first ATSR sensor on board the ERS-1 satellite Mount Pinatubo erupted in June 1991, injecting a large amount of aerosol into the stratosphere. Whilst the (A)ATSR sensors have been designed to be robust to aerosol through the use of dual view sensors (e.g., [
35]) there may be some residual effect present in the SST retrievals in the years shortly after 1991. In May 1992 the 3.7 micron channel failed on board the ATSR1 sensor. This can be seen in
Table 2, with only two channel retrievals available for the ATSR1 sensor. Whilst data are available for 1996 from ATSR1, these are of lower quality and were excluded. Data from ATSR2 is available from August 1995 through to June 2003, with the exception of a six-month gap in the first half of 1996. During 2001 a gyroscope failed on the ERS-2 satellite, with data quality impacted between January 2001 and June/July 2001 when a zero gyro mode was implemented to improve the quality. Data from the AATSR sensor are available between July 2002 and April 2012. There are no known events thought to impact on the quality of the data in this period.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}