Estimating Tree Height and Diameter at Breast Height (DBH) from Digital Surface Models and Orthophotos Obtained with an Unmanned Aerial System for a Japanese Cypress (Chamaecyparis obtusa) Forest


Abstract
:1. Introduction
2. Materials and Methods
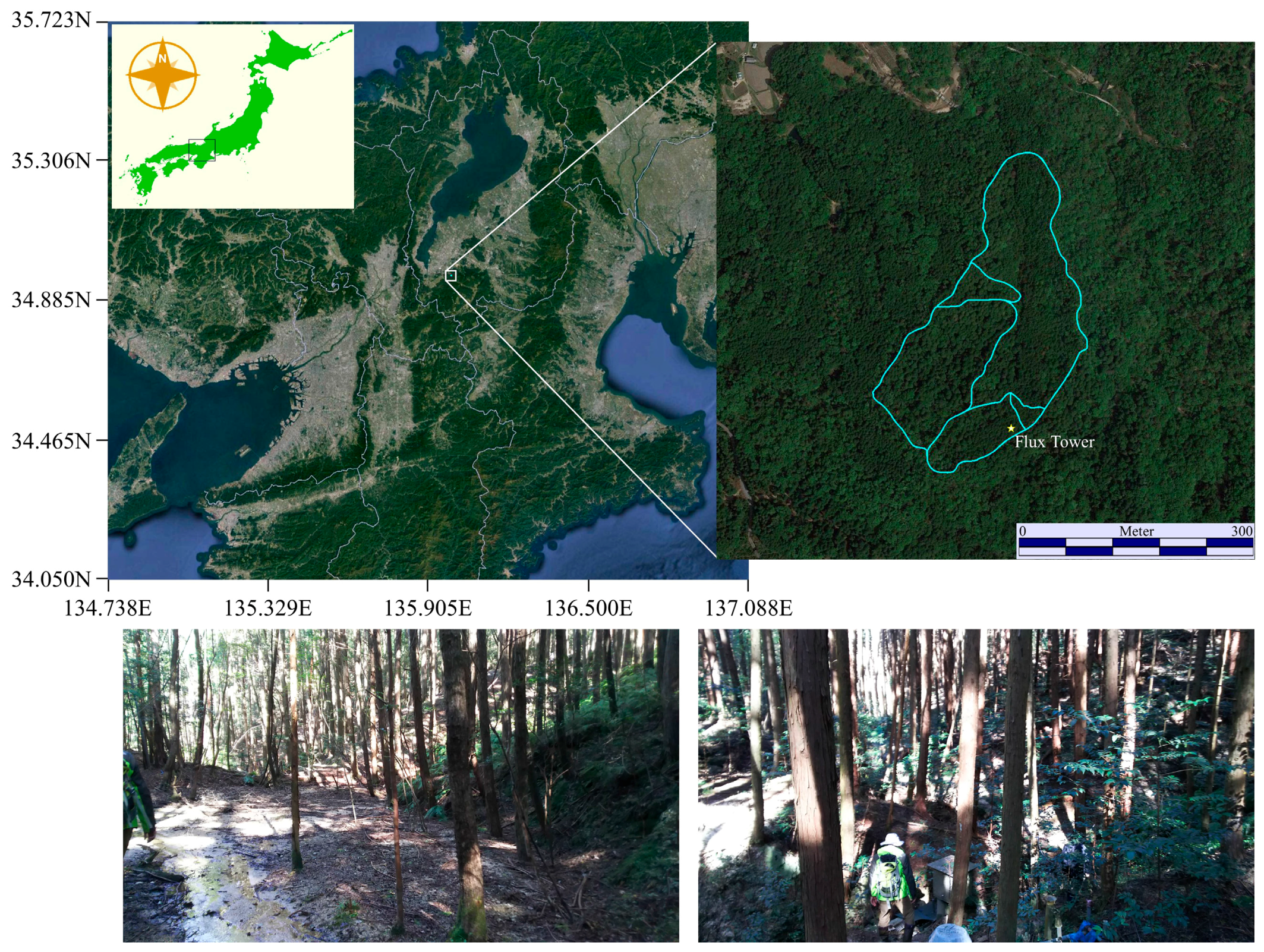
2.1. Study Site
2.2. Photogrammetry 3D Model Construction
2.2.1. Collection and Processing of Aerial Photos
2.2.2. Forest Inventory Ground Survey
2.2.3. Estimating and Analyzing Tree Parameters
2.3. Automatic Canopy Extraction
3. Results
3.1. Orthophoto, DSM, DTM and CHM
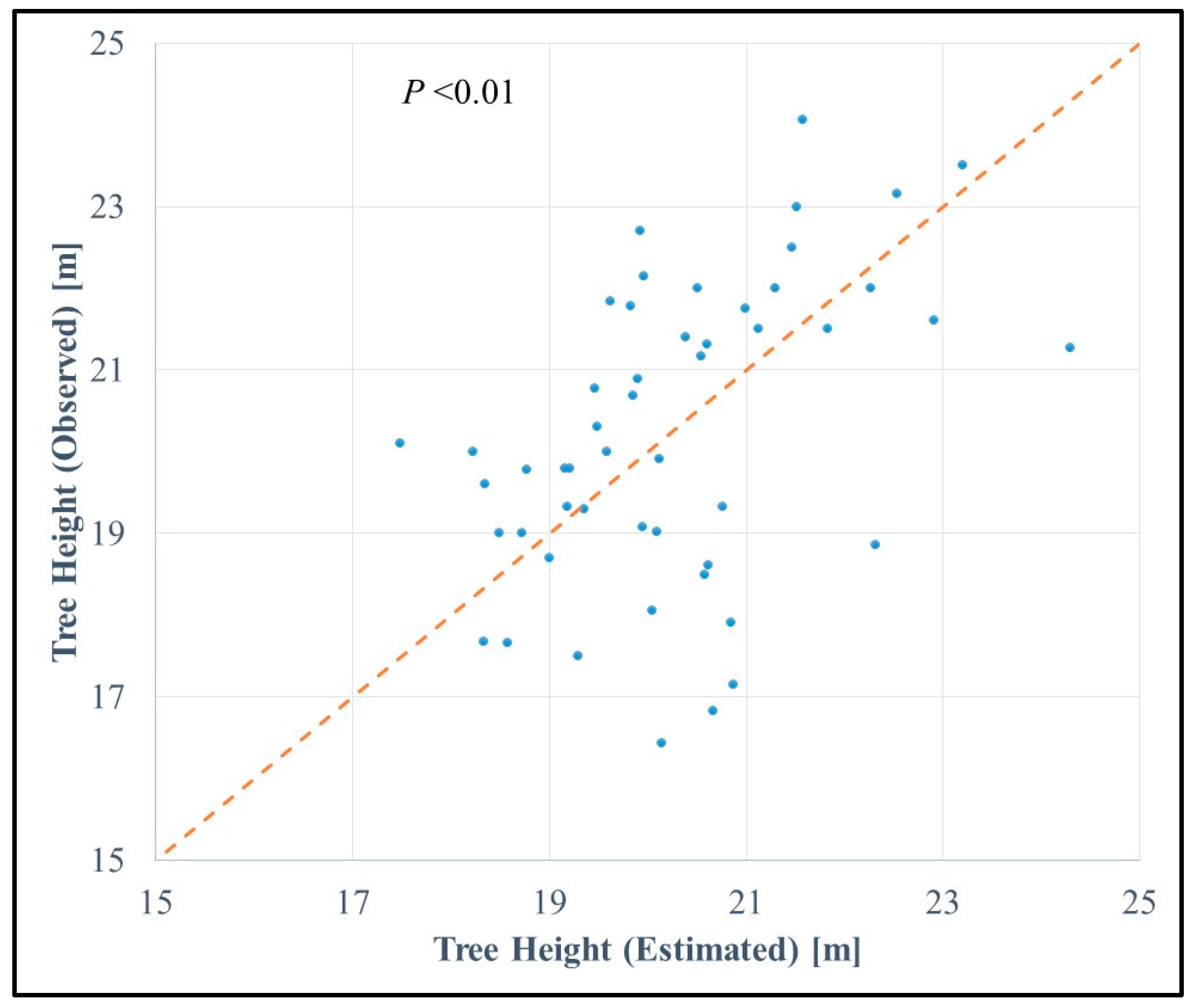
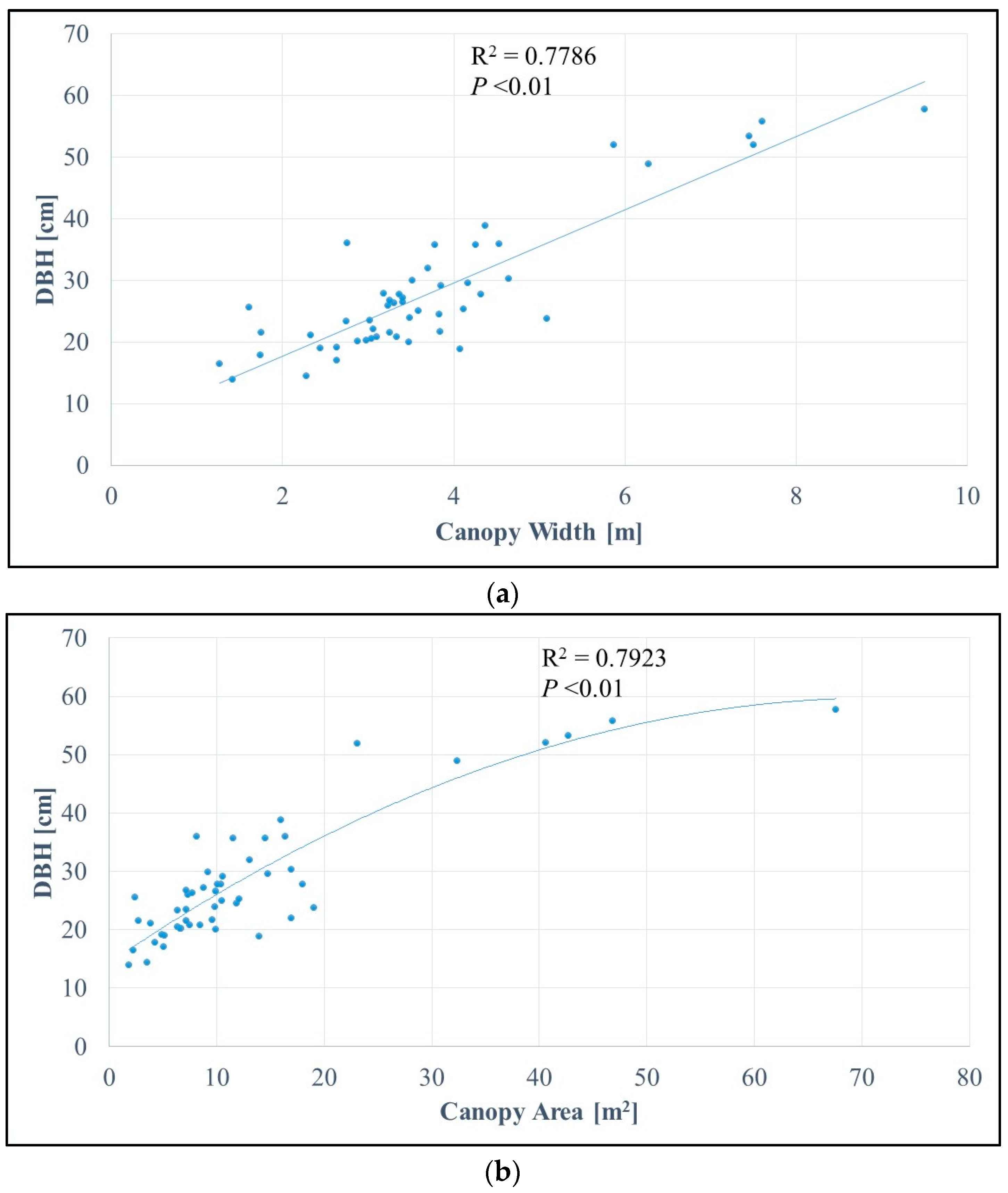
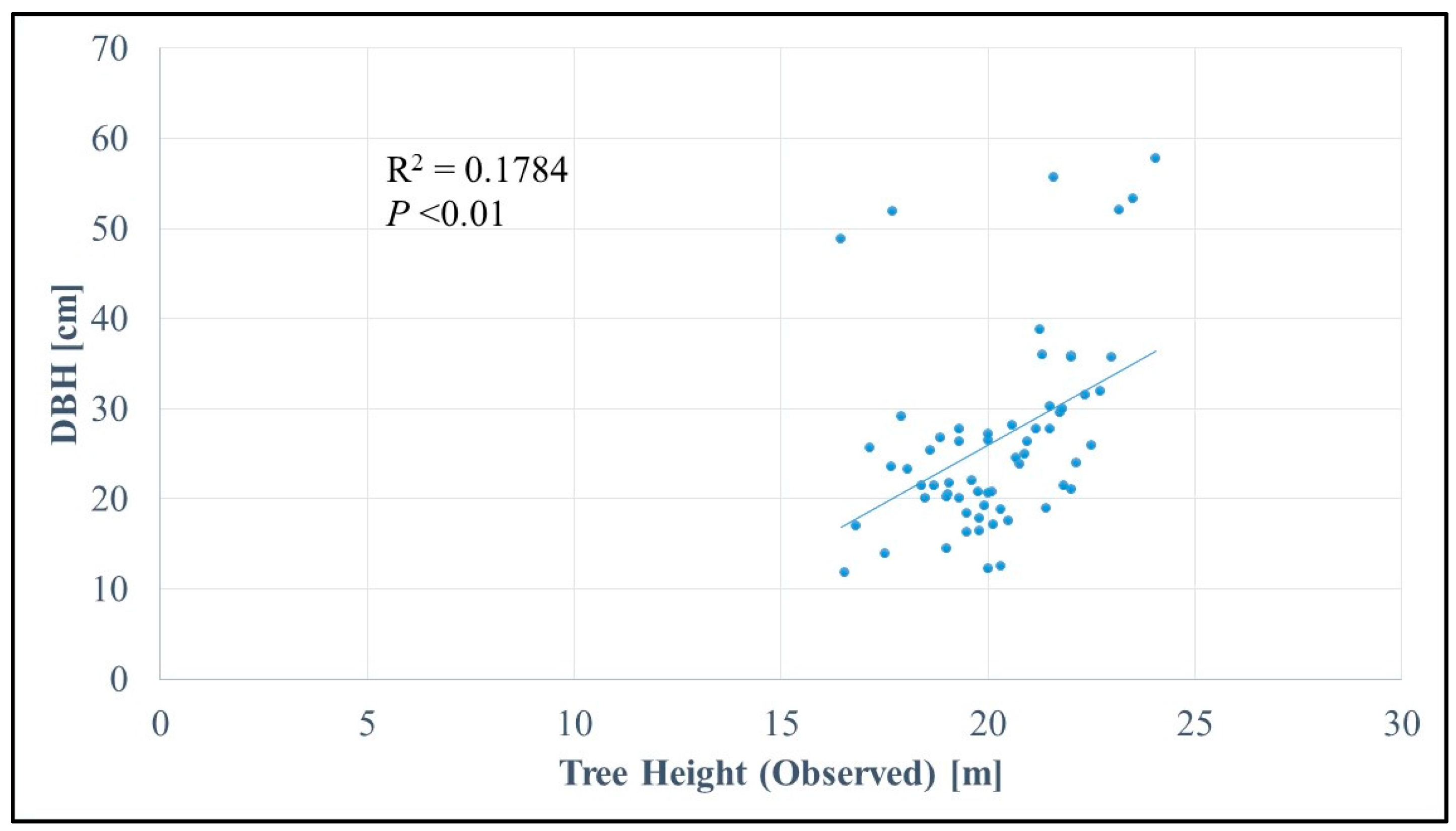
3.2. Tree Height, DBH Analysis
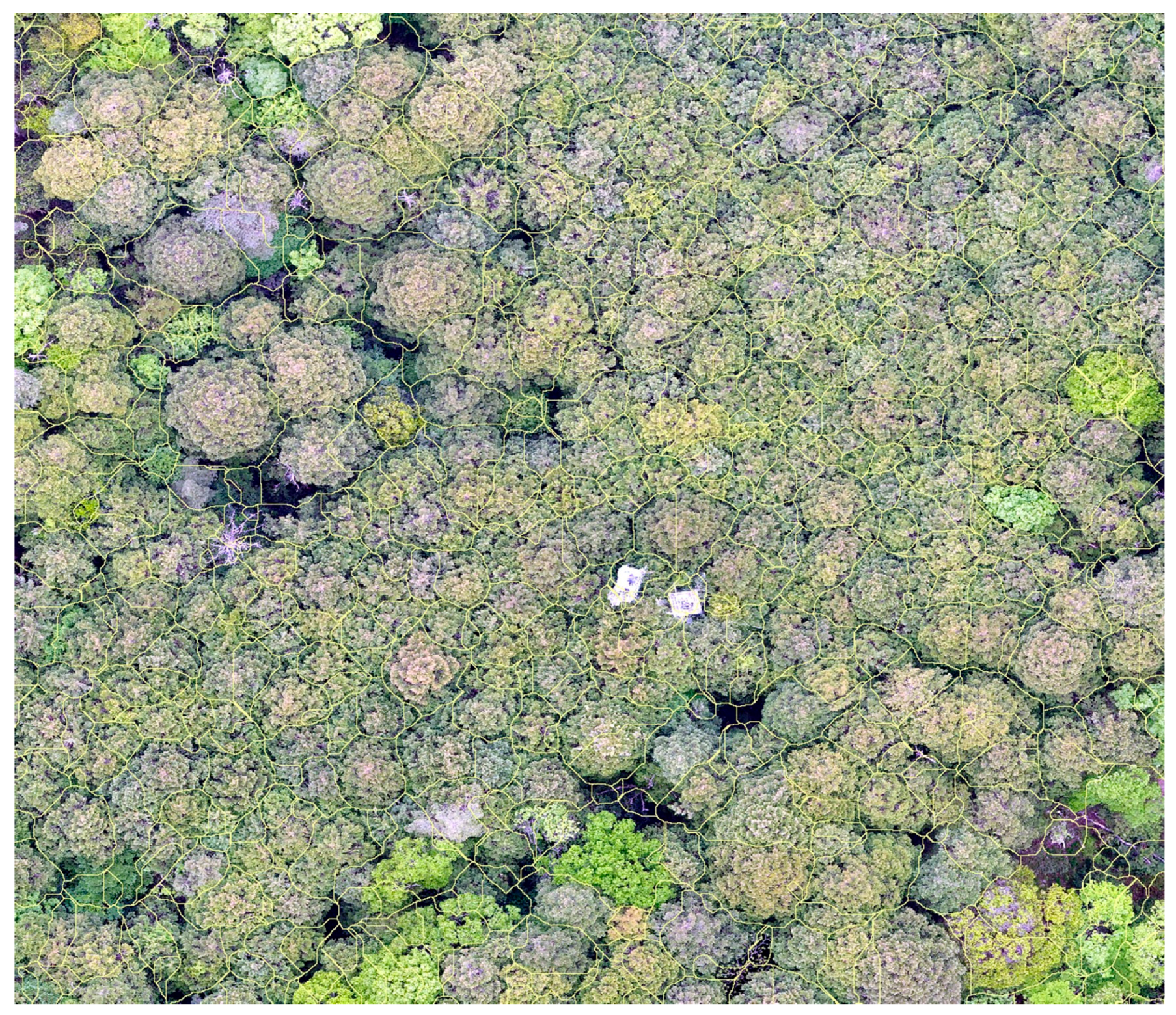
3.3. Canopy Segmentation
4. Discussion
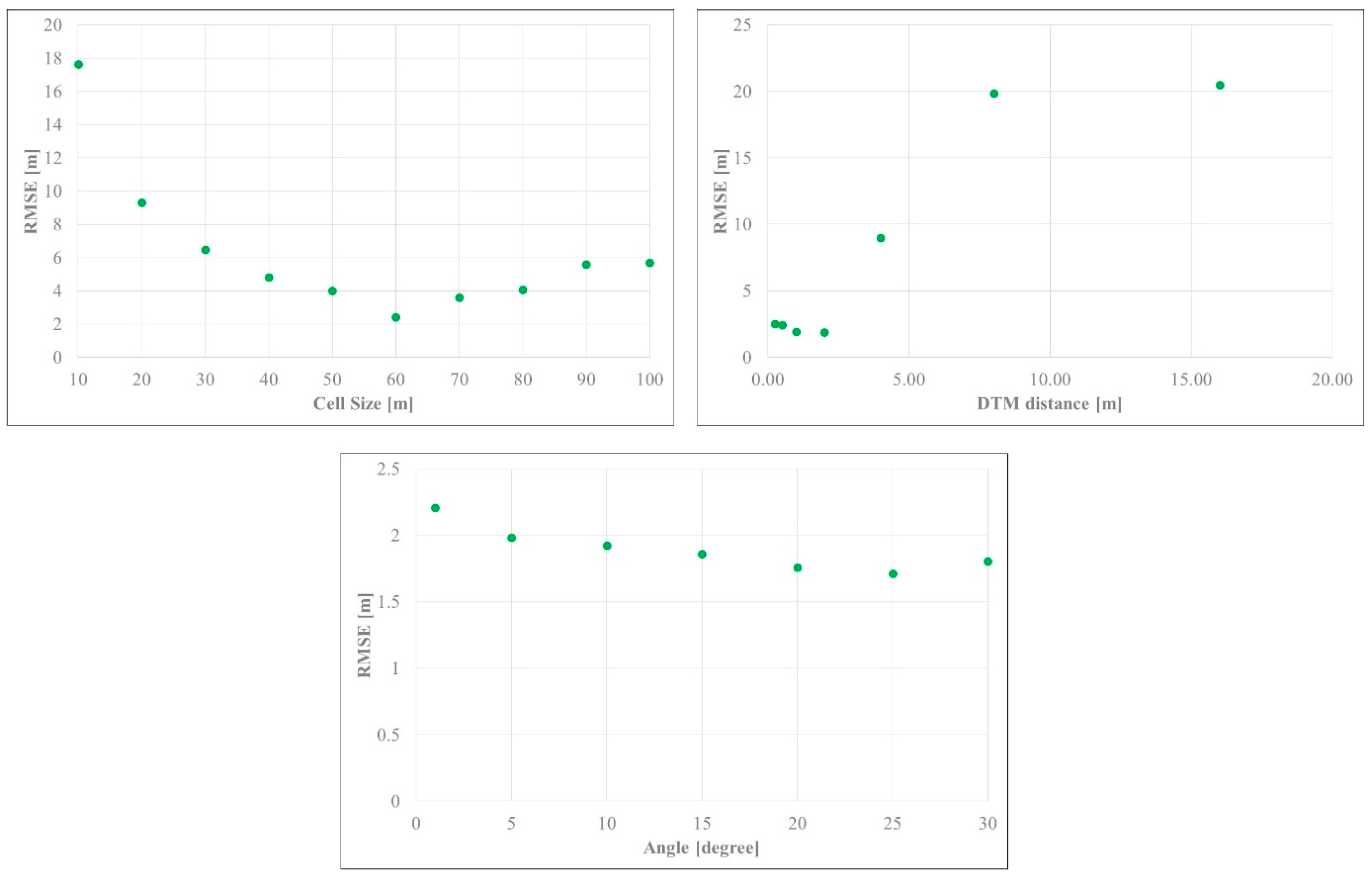
4.1. DTM Generation
4.2. Forest Parameter Extraction Using UAS
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hyyppä, J.; Schardt, M.; Haggren, H.; Koch, B.; Lohr, U.; Scherrer, H.U.; Paananen, R.; Luukkonen, H.; Ziegler, M.; Hyyppä, H.; et al. HIGH-SCAN: The first European-wide attempt to derive single-tree information from laserscanner data. Photogramm. J. Finl. 2001, 17, 43–53. [Google Scholar]
- Di Lallo, G.; Mundhenk, P.; Zamora López, S.E.; Marchetti, M.; Köhl, M. REDD+: Quick Assessment of Deforestation Risk Based on Available Data. Forests 2017, 8, 29. [Google Scholar] [CrossRef]
- Climate Focus. Forests and Land Use in the Paris Agreement. The Paris Agreement Summary. 2015. Available online: http://www.climatefocus.com/publications/cop21-paris-2015-climate-focus-overall-summary-and-client-briefs (accessed 27 November 2017).
- Arneth, A.; Harrison, S.P.; Zaehle, S.; Tsigaridis, K.; Menon, S.; Bartlein, P.J.; Feichter, J.; Korhola, A.; Kulmala, M.; O’Donnell, D.; et al. Terrestrial biogeochemical feedbacks in the climate system. Nat. Geosci. 2010, 3, 525–532. [Google Scholar] [CrossRef]
- Zellweger, F.; Baltensweiler, A.; Ginzler, C.; Roth, T.; Braunisch, V.; Bugmann, H.; Bollmann, K. Environmental predictors of species richness in forest landscapes: Abiotic factors versus vegetation structure. J. Biogeogr. 2016, 43, 1080–1090. [Google Scholar] [CrossRef]
- Jung, J.; Kim, S.; Hong, S.; Kim, K.; Kim, E.; Im, J.; Heo, J. Effects of national forest inventory plot location error on forest carbon stock estimation using k-nearest neighbor algorithm. ISPRS J. Photogramm. Remote Sens. 2013, 81, 82–92. [Google Scholar] [CrossRef]
- Iizuka, K.; Tateishi, R. Estimation of CO2 Sequestration by the Forests in Japan by Discriminating Precise Tree Age Category Using Remote Sensing Techniques. Remote Sens. 2015, 7, 15082–15113. [Google Scholar] [CrossRef] [Green Version]
- Rana, P.; Korhonen, L.; Gautam, B.; Tokola, T. Effect of field plot location on estimating tropical forest above-ground biomass in Nepal using airborne laser scanning data. ISPRS J. Photogramm. Remote Sens. 2014, 94, 55–62. [Google Scholar] [CrossRef]
- Köhl, M.; Magnussen, S.S.; Marchetti, M. Sampling Methods, Remote Sensing and GIS Multiresource Forest Inventory; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- West, P.W. Tree and Forest Measurement, 3rd ed.; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar]
- Němec, P. Comparison of modern forest inventory method with the common method for management of tropical rainforest in the Peruvian Amazon. J. Trop. For. Sci. 2015, 27, 80–91. [Google Scholar]
- Moskal, L.M.; Zheng, G. Retrieving Forest Inventory Variables with Terrestrial Laser Scanning (TLS) in Urban Heterogeneous Forest. Remote Sens. 2012, 4, 1–20. [Google Scholar] [CrossRef]
- Bauwens, S.; Bartholomeus, H.; Calders, K.; Lejeune, P. Forest Inventory with Terrestrial LiDAR: A Comparison of Static and Hand-Held Mobile Laser Scanning. Forests 2016, 7, 127. [Google Scholar] [CrossRef]
- Vastaranta, M.; Latorre, E.G.; Luoma, V.; Saarinen, N.; Holopainen, M.; Hyyppä, J. Evaluation of a Smartphone App for Forest Sample Plot Measurements. Forests 2015, 6, 1179–1194. [Google Scholar] [CrossRef]
- Lane, V.R.; Cordell, K.C.; Zarnoch, S.J.; Green, G.T.; Poudyal, N.; Fox, S. The Forest Service Safety Survey: Results from an Employee-Wide Safety Attitude Survey; e-General Technical Report SRS-GTR-191; U.S. Department of Agriculture Forest Service, Southern Research Station: Asheville, NC, USA, 2014; p. 58.
- Hyyppä, J.; Yu, X.; Hyyppä, H.; Vastaranta, M.; Holopainen, M.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Vaaja, M.; Koskinen, J.; et al. Advances in Forest Inventory Using Airborne Laser Scanning. Remote Sens. 2012, 4, 1190–1207. [Google Scholar] [CrossRef]
- Kobayashi, S.; Widyorini, R.; Kawai, S.; Omura, Y.; Sanga-Ngoie, K.; Supriadi, B. Backscattering Characteristics of L-Band Polarimetric and Optical Satellite Imagery over Planted Acacia Forests in Sumatra, Indonesia. J. Appl. Remote Sens. 2012, 6, 063525. [Google Scholar]
- Ota, T.; Ogawa, M.; Shimizu, K.; Kajisa, T.; Mizoue, N.; Yoshida, S.; Takao, G.; Hirata, Y.; Furuya, N.; Sano, T.; et al. Aboveground Biomass Estimation Using Structure from Motion Approach with Aerial Photographs in a Seasonal Tropical Forest. Forests 2015, 6, 3882–3898. [Google Scholar] [CrossRef]
- Wolter, P.T.; Townsend, P.A.; Sturtevant, B.R. Estimation of forest structural parameters using 5 and 10 meter SPOT-5 satellite data. Remote Sens. Environ. 2009, 113, 2019–2036. [Google Scholar] [CrossRef]
- Asner, G.; Palace, M.; Keller, M.; Pereira, M.; Silva, J.; Zweede, J. Estimating canopy structure in an Amazon forest from laser rangefinder and IKONOS satellite observations. Biotropica 2002, 34, 483–492. [Google Scholar] [CrossRef]
- Luckman, A.; Baker, J.; Honzak, M.; Lucas, R. Tropical Forest Biomass Density Estimation Using JERS-1 SAR: Seasonal Variation, Confidence Limits, and Application to Image Mosaics. Remote Sens. Environ. 1998, 63, 126–139. [Google Scholar] [CrossRef]
- Fransson, J.E.S.; Israelsson, H. Estimation of Stem Volume in Boreal Forests Using ERS-1 C- and JERS-1 L-Band SAR Data. Int. J. Remote Sens. 1999, 20, 123–137. [Google Scholar] [CrossRef]
- Lucas, R.M.; Armston, J.; Fairfax, R.; Fensham, R.; Accad, A.; Carreiras, J.; Kelley, J.; Bunting, P.; Clewley, D.; Bray, S.; et al. An Evaluation of the ALOS PALSAR L-Band Backscatter—Above Ground Biomass Relationship Queensland, Australia: Impacts of Surface Moisture Condition and Vegetation Structure. IEEE J. Sel. Topics Appl. Earth Obs. Remote Sens. 2010, 3, 576–593. [Google Scholar] [CrossRef]
- Hamdan, O.; Aziz, H.K.; Rahman, K.A. Remotely Sensed L-Band SAR Data for Tropical Forest Biomass Estimation. J. Trop. For. Sci. 2011, 23, 318–327. [Google Scholar]
- Iizuka, K.; Tateishi, R. Simple relationship analysis between L-band backscattering intensity and the stand characteristics of sugi (Cryptomeria japonica) and hinoki (Chamaecyparis obtusa) trees. Adv. Remote Sens. 2014, 3, 219–234. [Google Scholar] [CrossRef]
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef]
- Goodbody, T.R.H.; Coops, N.C.; Marshall, P.L.; Tompalski, P.; Crawford, P. Unmanned aerial systems for precision forest inventory purposes: A review and case study. For. Chron. 2017, 93, 71–81. [Google Scholar] [CrossRef]
- Dash, J.P.; Watt, M.S.; Pearse, G.D.; Heaphy, M.; Dungey, H.S. Assessing very high resolution UAV imagery for monitoring forest health during a simulated disease outbreak. ISPRS J. Photogramm. Remote Sens. 2017, 131, 1–14. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of Forest Structure Using Two UAV Techniques: A Comparison of Airborne Laser Scanning and Structure from Motion (SfM) Point Clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Mlambo, R.; Woodhouse, I.H.; Gerard, F.; Anderson, K. Structure from Motion (SfM) Photogrammetry with Drone Data: A Low Cost Method for Monitoring Greenhouse Gas Emissions from Forests in Developing Countries. Forests 2017, 8, 68. [Google Scholar] [CrossRef]
- Xu, Z.; Wu, L.; Gerke, M.; Wang, R.; Yang, H. Skeletal camera network embedded structure-from-motion for 3D scene reconstruction from UAV images. ISPRS J. Photogramm. Remote Sens. 2016, 121, 113–127. [Google Scholar] [CrossRef]
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P.; Chiteculo, V. Determining tree height and crown diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2017, 38, 2392–2410. [Google Scholar] [CrossRef]
- Saremi, H.; Kumar, L.; Stone, C.; Melville, G.; Turner, R. Sub-Compartment Variation in Tree Height, Stem Diameter and Stocking in a Pinus radiata D. Don Plantation Examined Using Airborne LiDAR Data. Remote Sens. 2014, 6, 7592–7609. [Google Scholar] [CrossRef]
- Takashima, A.; Kume, A.; Yoshida, S.; Murakami, T.; Kajisa, T.; Mizoue, N. Discontinuous DBH-height relationship of Cryptomeria japonica on Yakushima Island: Effect of frequent typhoons on the maximum height. Ecol. Res. 2009, 24, 1003–1011. [Google Scholar] [CrossRef]
- Osada, N. Crown exposure to light and tree allometry of 11 tree species in a snowy cool-temperate forest in Japan. Plant Ecol. 2012, 213, 783–794. [Google Scholar] [CrossRef]
- Jucker, T.; Caspersen, J.; Chave, J.; Antin, C.; Barbier, N.; Bongers, F.; Dalponte, M.; van Ewijk, K.Y.; Forrester, D.I.; Haeni, M.; et al. Allometric equations for integrating remote sensing imagery into forest monitoring programmes. Glob. Chang. Biol. 2017, 23, 177–190. [Google Scholar] [CrossRef] [PubMed]
- Google Earth, V 7.1.8.3036. (24 March 2016), Kiryu Experimental Site, Shiga Prefecture, Japan. 34.9643°N, 135.9939°E, Eye alt 1.08 km. Gray Buildings © 2008 ZENRIN. Available online: http://www.earth.google.com (accessed on 4 August 2017).
- Yi, G.; Jianxin, L.; Hangping, Q.; Bo, W. Survey of structure from motion. In Proceedings of the 2014 International Conference on Cloud Computing and Internet of Things, Changchun, China, 13–14 December 2014; pp. 72–76. [Google Scholar]
- Conrad, O.; Bechtel, B.; Bock, M.; Dietrich, H.; Fischer, E.; Gerlitz, L.; Wehberg, J.; Wichmann, V.; Böhner, J. System for Automated Geoscientific Analyses (SAGA) v. 2.1.4. Geosci. Model Dev. Discuss. 2015, 8, 2271–2312. [Google Scholar] [CrossRef]
- Agisoft Photoscan User Manual, 2017. Professional Edition, Version 1.3. Available online: http://www.agisoft.com/pdf/photoscan-pro_1_3_en.pdf (accessed on 31 August 2017).
- Serifoglu Yilmaz, C.; Gungor, O. Comparison of the performances of ground filtering algorithms and DTM generation from a UAV-based point cloud. Geocarto Int. 2016, 1–16. [Google Scholar] [CrossRef]
- Leitold, V.; Keller, M.; Morton, D.C.; Cook, B.D.; Shimabukuro, Y.E. Airborne lidar-based estimates of tropical forest structure in complex terrain: Opportunities and trade-offs for REDD+. Carbon Balance Manag. 2015, 10, 3. [Google Scholar] [CrossRef] [PubMed]
- Sumida, A.; Miyaura, T.; Torii, H. Relationships of tree height and diameter at breast height revisited: Analyses of stem growth using 20-year data of an even-aged Chamaecyparis obtusa stand. Tree Physiol. 2013, 33, 106–118. [Google Scholar] [CrossRef] [PubMed]
- Meng, S.X.; Lieffers, V.J.; Reid, D.E.B.; Rudnicki, M.; Silins, U.; Jin, M. Reducing stem bending increases the height growth of tall pines. J. Exp. Bot. 2006, 57, 3175–3182. [Google Scholar] [CrossRef] [PubMed]
- Otieno, D.; Li, Y.; Ou, Y.; Cheng, J.; Liu, S.; Tang, X.; Zhang, Q.; Jung, E.-Y.; Zhang, D.; Tenhunen, J. Stand characteristics and water use at two elevations in a sub-tropical evergreen forest in southern China. Agric. For. Meteorol. 2014, 194, 155–166. [Google Scholar] [CrossRef]
- Jing, L.; Hu, B.; Li, J.; Noland, T. Automated delineation of individual tree crowns from LiDAR data by multi-scale analysis and segmentation. Photogramm. Eng. Remote Sens. 2012, 78, 1275–1284. [Google Scholar] [CrossRef]
- Nguyen, L.V.; Tateishi, R.; Kondoh, A.; Sharma, R.C.; Nguyen, H.T.; To, T.T.; Minh, D.H.T. Mapping Tropical Forest Biomass by Combining ALOS-2, Landsat 8, and Field Plots Data. Land 2016, 5, 31. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Workflow | Parameter | Settings |
|---|---|---|
| Align Photos | Accuracy | High |
| Preselection | Reference | |
| Key Point Limit | 160,000 | |
| Tie Point Limit | 0 | |
| Adaptive Camera Model Fitting | Yes | |
| Build Dense Cloud | Quality | High |
| Depth Filtering | Aggressive | |
| Build Mesh | Surface Type | Height Field |
| Source Data | Dense Cloud | |
| Face Count | High | |
| Interpolation | Enabled | |
| Calculate Vertex Colors | Yes | |
| Build Digital Elevation Model (DEM) | Projection | WGS84 Latlong |
| Source Data | Dense Cloud | |
| Interpolation | Enabled | |
| Resolution | 0.057 m | |
| Build Orthomosaic | Surface | DEM |
| Enable Color Correction | Yes | |
| Enable Hole Filling | Yes | |
| Resolution | 0.0285 m |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iizuka, K.; Yonehara, T.; Itoh, M.; Kosugi, Y. Estimating Tree Height and Diameter at Breast Height (DBH) from Digital Surface Models and Orthophotos Obtained with an Unmanned Aerial System for a Japanese Cypress (Chamaecyparis obtusa) Forest. Remote Sens. 2018, 10, 13. https://doi.org/10.3390/rs10010013
Iizuka K, Yonehara T, Itoh M, Kosugi Y. Estimating Tree Height and Diameter at Breast Height (DBH) from Digital Surface Models and Orthophotos Obtained with an Unmanned Aerial System for a Japanese Cypress (Chamaecyparis obtusa) Forest. Remote Sensing. 2018; 10(1):13. https://doi.org/10.3390/rs10010013
Chicago/Turabian StyleIizuka, Kotaro, Taichiro Yonehara, Masayuki Itoh, and Yoshiko Kosugi. 2018. "Estimating Tree Height and Diameter at Breast Height (DBH) from Digital Surface Models and Orthophotos Obtained with an Unmanned Aerial System for a Japanese Cypress (Chamaecyparis obtusa) Forest" Remote Sensing 10, no. 1: 13. https://doi.org/10.3390/rs10010013
APA StyleIizuka, K., Yonehara, T., Itoh, M., & Kosugi, Y. (2018). Estimating Tree Height and Diameter at Breast Height (DBH) from Digital Surface Models and Orthophotos Obtained with an Unmanned Aerial System for a Japanese Cypress (Chamaecyparis obtusa) Forest. Remote Sensing, 10(1), 13. https://doi.org/10.3390/rs10010013