Ice Velocity Variations of the Polar Record Glacier (East Antarctica) Using a Rotation-Invariant Feature-Tracking Approach

Abstract
:1. Introduction
2. Study Area and Data Sources
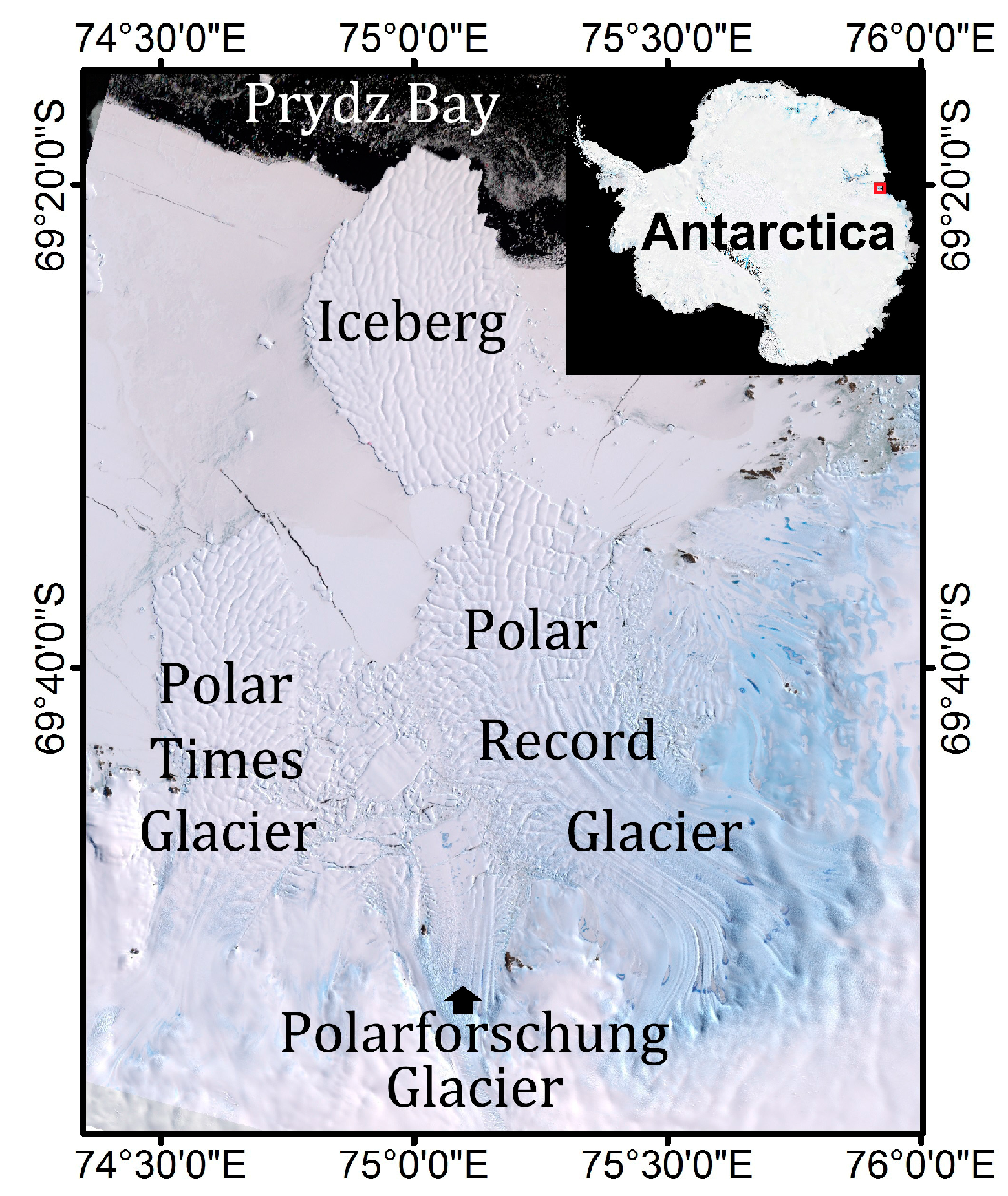
2.1. Study Area
2.2. Sequential Landsat Series Images and Preprocessing
2.3. Validation Data
3. Methods
3.1. Rotation-Invariant Feature Tracking
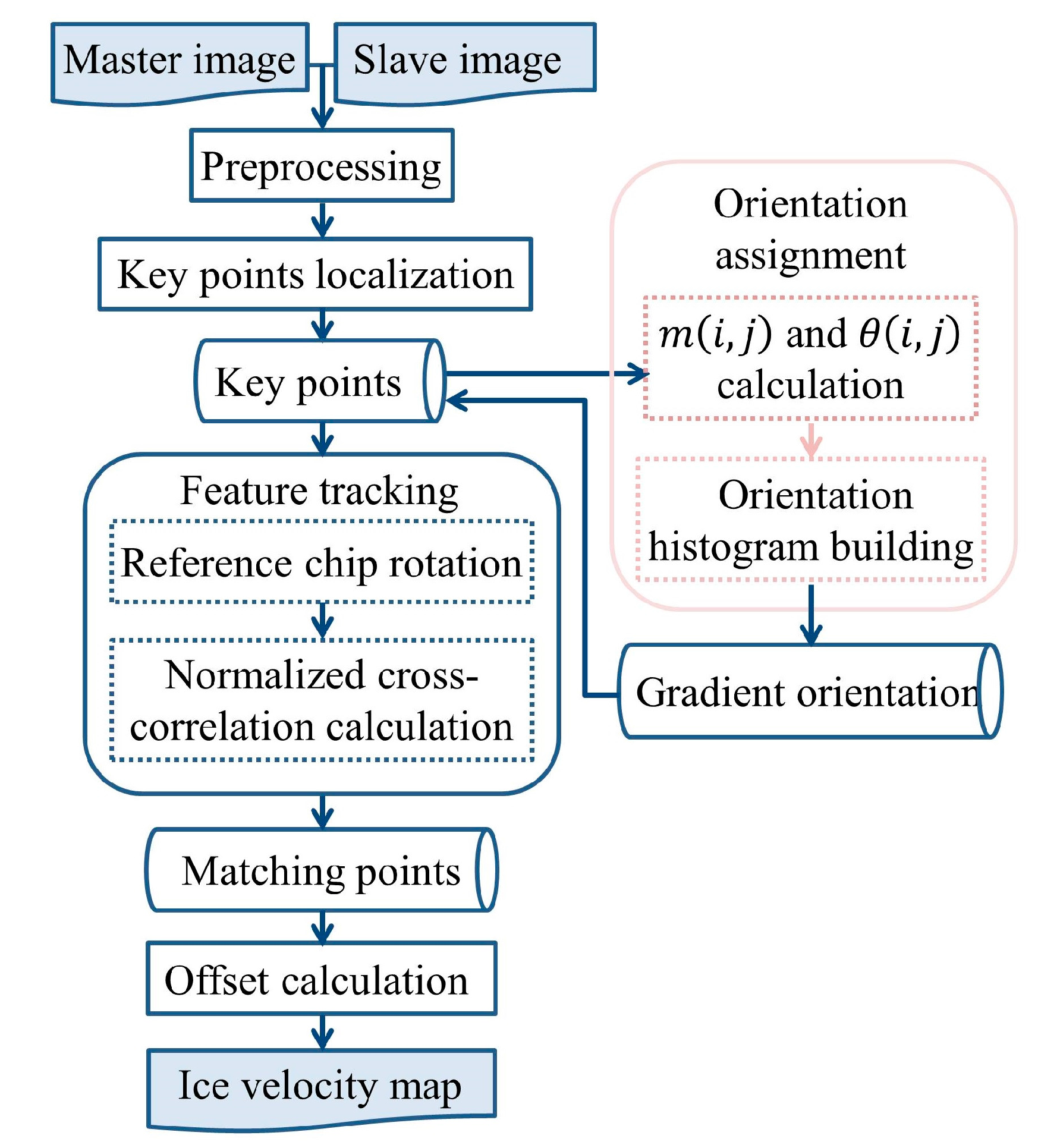
- Preprocessing. The master image and slave image are strictly georeferenced and orthorectified. By performing this step, the relief displacement and geometric distortion can be removed.
- Keypoint localization. In master image, keypoints were chosen at regular intervals. Since the resolution of the MEaSUREs InSAR-Based Antarctica Ice Velocity Map used in this research is 450 m, the corresponding resolution of the Landsat series images is 30 m. Therefore, the interval is 13 pixels.
- Orientation assignment. The rotation-invariant parameter coming from SIFT is used to extract orientation angle . Firstly, the gradient magnitude and orientation are the bases for the calculation of orientation . They can be calculated utilizing the features from the keypoint and its neighborhoods, as follows [23]:where is the feature for each pixel. In this research, the spectrum is used. Therefore, each is a six-dimensional vector. is the locator for each pixel related to the keypoint in the correlation window. The orientation histogram can then be built from these gradient magnitudes and orientations. This orientation histogram has 36 bins covering the 360 degree range of orientations. Each bin is the sum of the gradient magnitudes from the same orientation. The gradient magnitudes for each pixel presented in the histogram are weighted by a Gaussian-weighted circular window. The diameter of the window is five pixels [23], which is an empirical value. Finally, a gradient orientation with respect to the highest bin in the histogram is assigned to the keypoints.
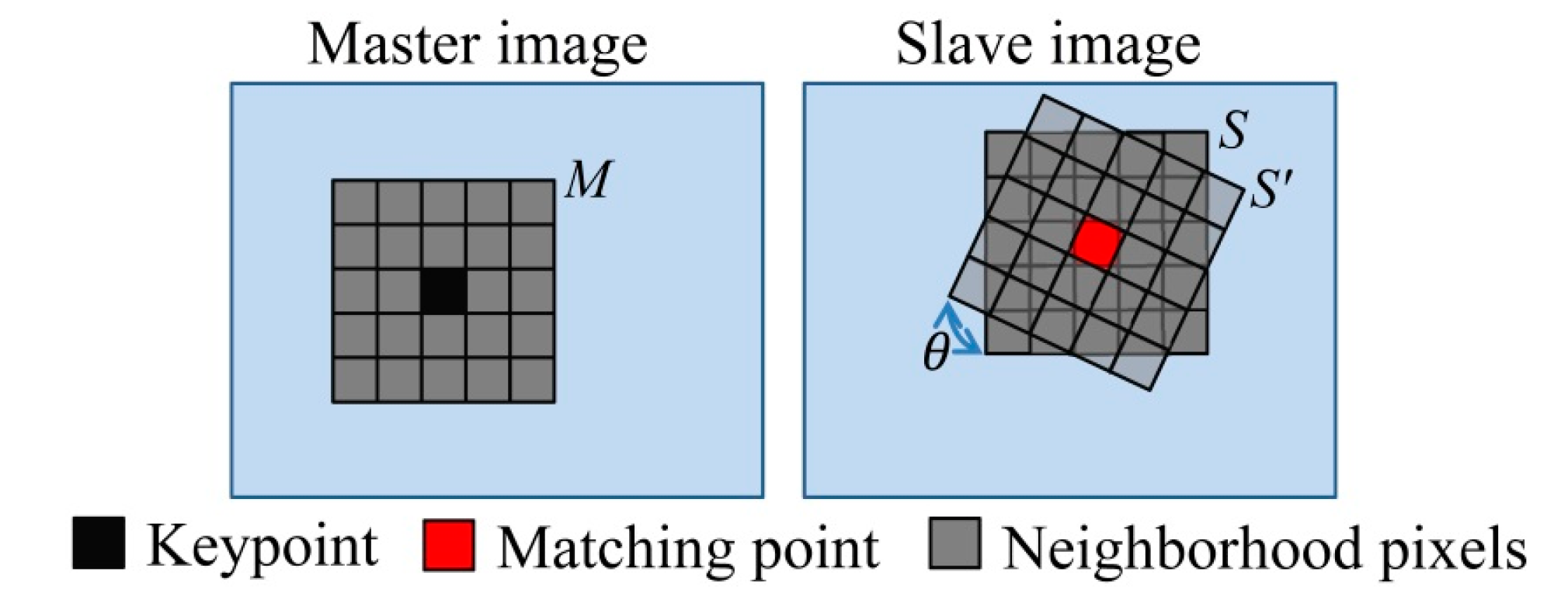
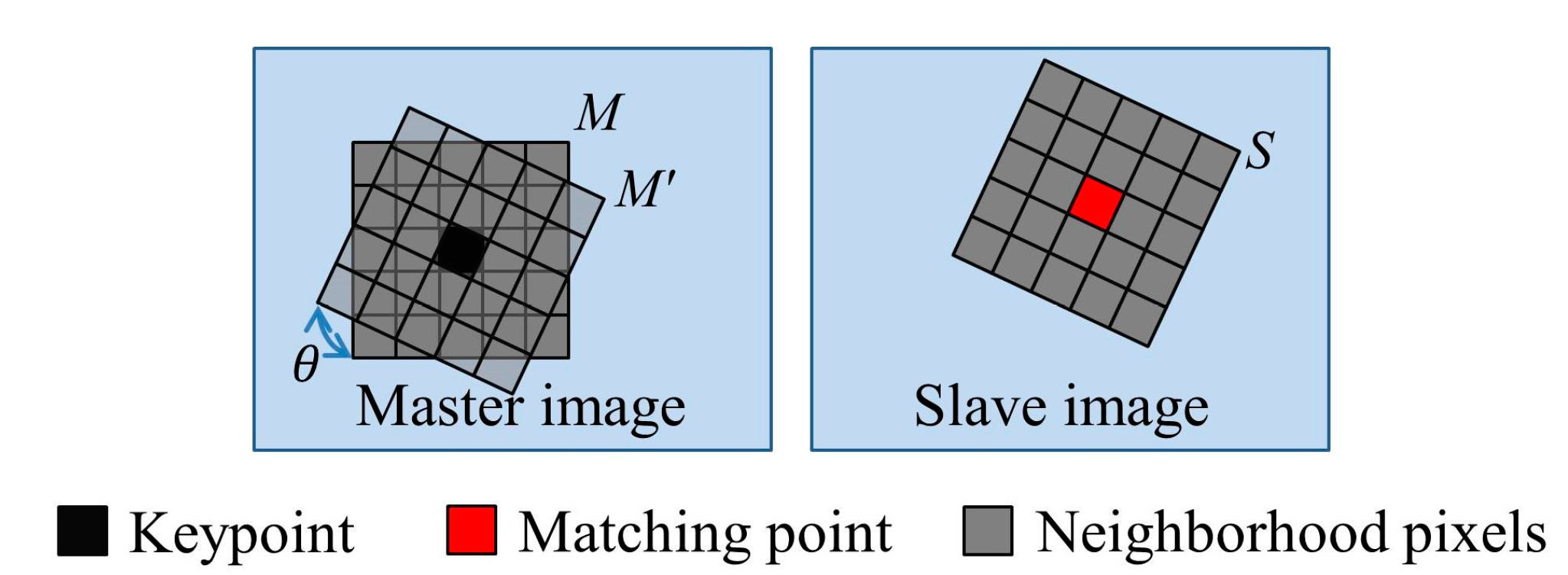
- Feature tracking. Firstly, reference chip M is rotated to Mʹ with orientation to eliminate orientation-based displacement (Figure 5). Then, for a candidate feature of the keypoint in the master image, NCC is undertaken on the reference chip centered at the keypoint. According to the rule in [29], the size of the reference chip is 50 × 50, and the corresponding size of the match chip is 100 × 100. Finally, the similarity between Mʹ and S is evaluated using the NCC method.
- Offset calculation. The spatial displacement can be calculated from the positional difference of conjugate points. Given the known time interval between two image acquisitions, the ice velocity (including flow speed and direction) can be calculated.
3.2. Validation
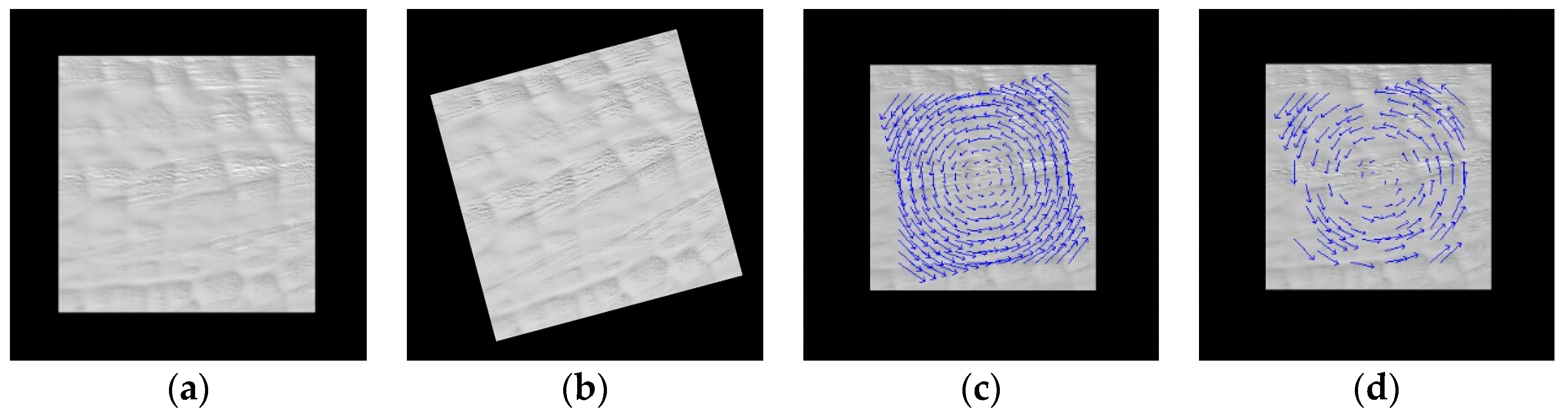
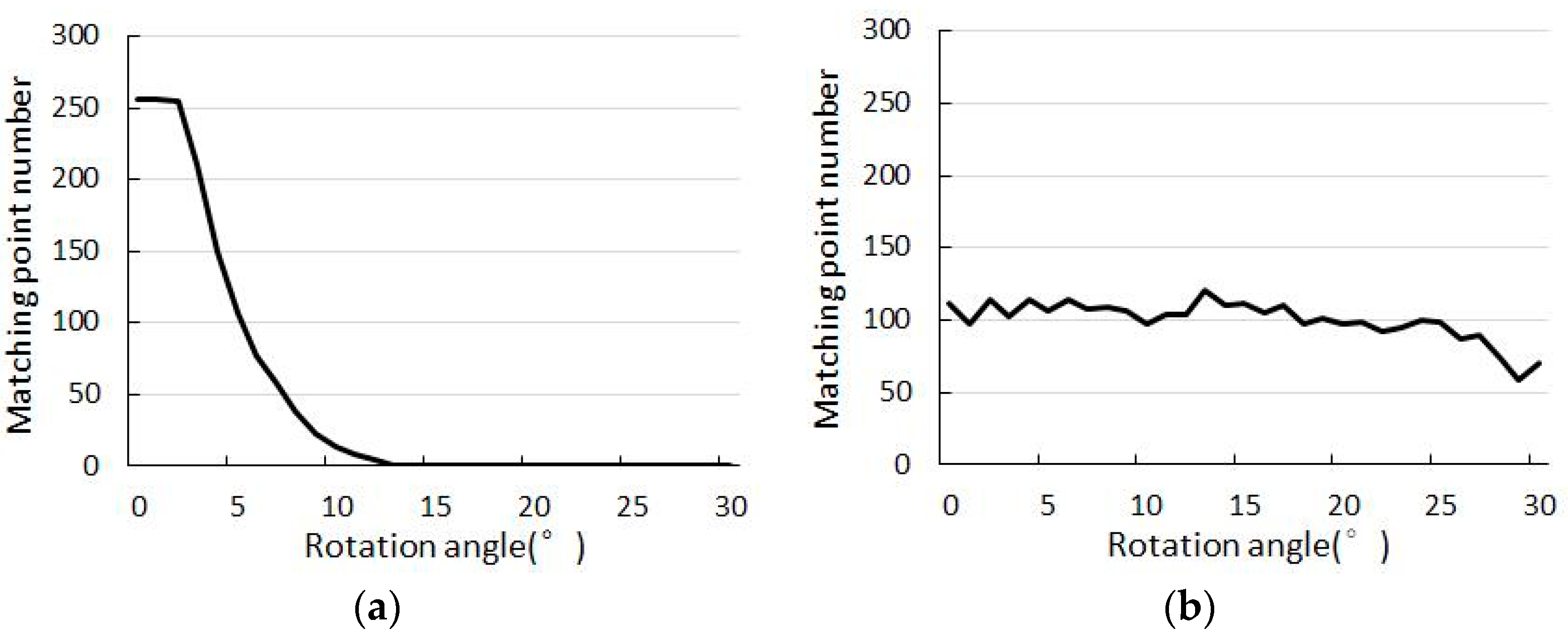
3.2.1. Simulated-Image-Based Validation
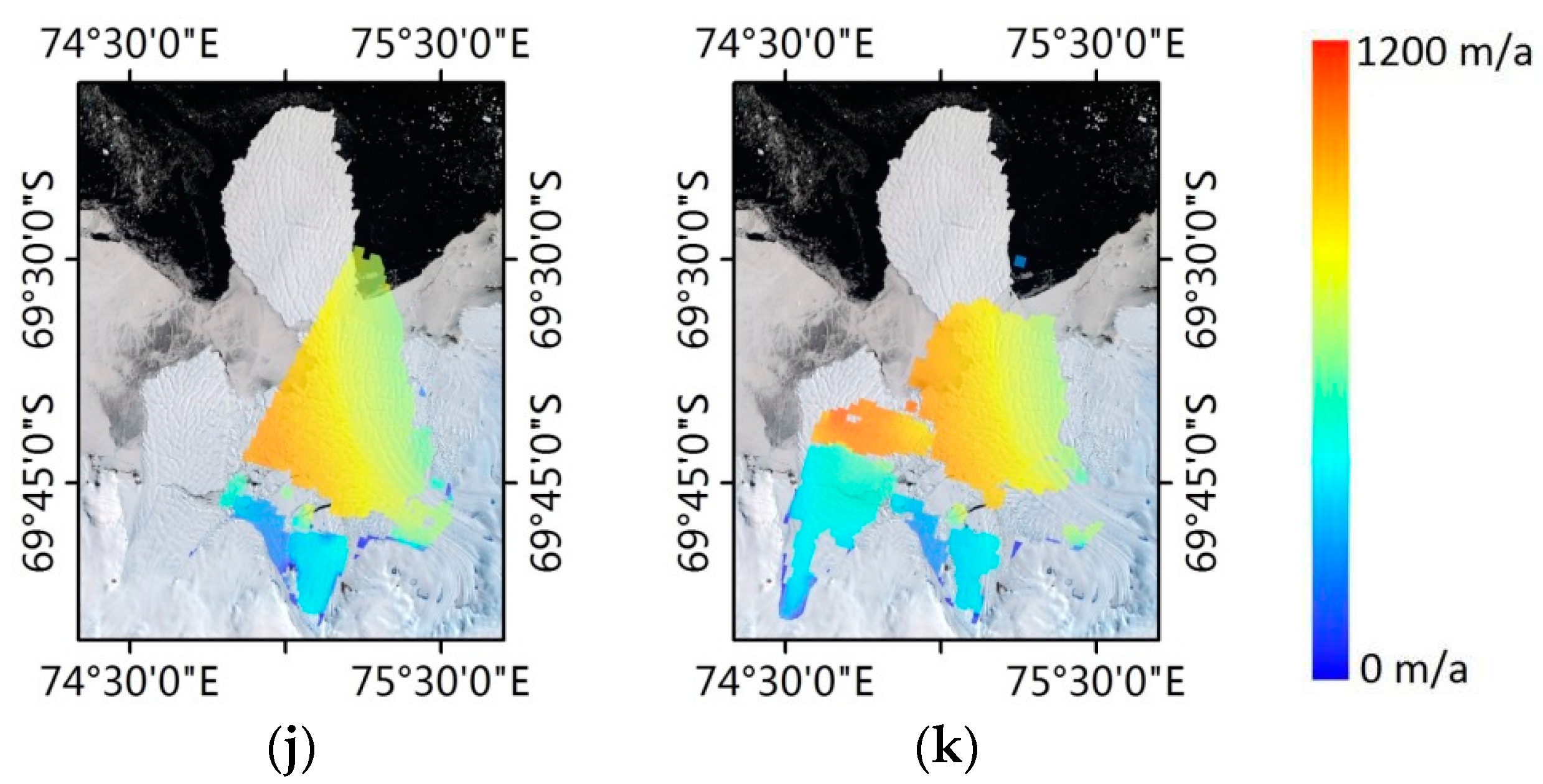
3.2.2. Landsat-Image-Based Validation
4. Ice Velocity Variability
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hanna, E.; Navarro, F.J.; Pattyn, F.; Domingues, C.M.; Fettweis, X.; Ivins, E.R.; Nicholls, R.J.; Ritz, C.; Smith, B.; Tulaczyk, S.; et al. Ice-sheet mass balance and climate change. Nature 2013, 498, 51–59. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Scambos, T.A.; Bohlander, J.A.; Shuman, C.A.; Skvarca, P. Glacier acceleration and thinning after ice shelf collapse in the Larsen B embayment, Antarctica. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef]
- Stearns, L.A.; Smith, B.E.; Hamilton, G.S. Increased flow speed on a large East Antarctic outlet glacier caused by subglacial floods. Nat. Geosci. 2008, 1, 827–831. [Google Scholar] [CrossRef]
- Golledge, N.R.; Levy, R.H. Geometry and dynamics of an East Antarctic Ice Sheet outlet glacier, under past and present climates. J. Geophys. Res. 2011, 116, 178–187. [Google Scholar] [CrossRef]
- Miles, B.W.J.; Stokes, C.R.; Jamieson, S.S.R. Simultaneous disintegration of outlet glaciers in Porpoise Bay (Wilkes Land), East Antarctica, driven by sea ice break-up. Cryosphere 2017, 11, 427–442. [Google Scholar] [CrossRef]
- King, M.A.; Coleman, R.; Morgan, P.J.; Hurd, R.S. Velocity change of the Amery Ice Shelf, East Antarctica, during the period 1968–1999. Geophys. Res. Lett. 2007, 112, 306–316. [Google Scholar] [CrossRef]
- Giles, A.B.; Massom, R.A.; Warner, R.C. A method for sub-pixel scale feature tracking using Radarsat images applied to the Mertz Glacier Tongue, East Antarctica. Remote Sens. Environ. 2009, 113, 1691–1699. [Google Scholar] [CrossRef]
- Fukuda, T.; Sugiyama, S.; Sawagaki, T.; Nakamura, K. Recent variations in the terminus position, ice velocity and surface elevation of Langhovde Glacier, East Antarctica. Antarct. Sci. 2014, 26, 636–645. [Google Scholar] [CrossRef]
- Pattyn, F.; Derauw, D. Ice-dynamic conditions of Shirase Glacier, Antarctica, inferred from ERS SAR interferometry. J. Glaciol. 2002, 48, 559–565. [Google Scholar] [CrossRef]
- Wuite, J.; Jezek, K.C. Evidence of past fluctuations on Stancomb-Wills Ice Tongue, Antarctica, preserved by relict flow stripes. J. Glaciol. 2009, 55, 239–244. [Google Scholar] [CrossRef]
- Zhou, C.; Zhou, Y.; Deng, F.; Ai, S.; Wang, Z.; E, D. Seasonal and interannual ice velocity changes of Polar Record Glacier, East Antarctica. Ann. Glaciol. 2014, 55, 45–51. [Google Scholar] [CrossRef]
- Ahn, Y.; Howat, I.M. Efficient, Automated Glacier Surface Velocity Measurement from Repeat Images Using Multi-Image/Multi-Chip (MIMC) and Null Exclusion Feature tracking. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2838–2846. [Google Scholar]
- Fahnestock, M.; Scambos, T.; Moon, T.; Gardner, A.; Haran, T.; Klinger, M. Rapid large-area mapping of ice flow using Landsat 8. Remote Sens. Environ. 2016, 185, 84–94. [Google Scholar] [CrossRef]
- Bindschadler, R.A.; Scambos, T.A. Satellite-image derived velocity field of an Antarctic ice stream. Science 1991, 252, 242–246. [Google Scholar] [CrossRef] [PubMed]
- Scambos, T.A.; Dutkiewicz, M.J.; Wilson, J.C.; Bindschadler, R.A. Application of image cross-correlation to the measurement of glacier velocity using satellite image data. Remote Sens. Environ. 1992, 42, 177–186. [Google Scholar] [CrossRef]
- Bindschadler, R.; Vornberger, P.; Blankenship, D.; Scambos, T.; Jacobel, R. Surface velocity and mass balance of Ice Streams D and E, West Antarctica. J. Glaciol. 1996, 42, 461–475. [Google Scholar] [CrossRef]
- Berthier, E.; Raup, B.; Scambos, T. New velocity map and mass-balance estimate of Mertz Glacier, East Antarctica, derived from Landsat sequential imagery. J. Glaciol. 2003, 49, 503–511. [Google Scholar] [CrossRef]
- Rolstad, C.; Amlien, J.; Hagen, J.O.; Lunden, B. Visible and near-infrared digital images for determination of ice velocities and surface elevation during a surge on Osbornebreen, a tidewater glacier in Svalbard. Ann. Glaciol. 1997, 24, 255–261. [Google Scholar] [CrossRef]
- Haug, T.; Kääb, A.; Skvarca, P. Monitoring ice shelf velocities from repeat MODIS and Landsat data—A method study on the Larsen C ice shelf, Antarctic Peninsula, and 10 other ice shelves around Antarctica. Cryosphere 2010, 4, 161–178. [Google Scholar] [CrossRef]
- Heid, T.; Kääb, A. Repeat optical satellite images reveal widespread and long term decrease in land-terminating glacier speeds. Cryosphere 2012, 6, 467–478. [Google Scholar] [CrossRef]
- Leprince, S.; Ayoub, F.; Klinger, Y.; Avouac, J.P. Co-registration of optically sensed images and correlation (COSI-Corr): An operational methodology for ground deformation measurements. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2007), Barcelona, Spain, 23–28 July 2007; pp. 1943–1946. [Google Scholar]
- Heid, T.; Kääb, A. Evaluation of existing image matching methods for deriving glacier surface displacements globally from optical satellite imagery. Remote Sens. Environ. 2012, 118, 339–355. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Dellinger, F.; Delon, J.; Gousseau, Y.; Michel, J.; Tupin, F. SAR-SIFT: A SIFT-like algorithm for SAR images. IEEE Trans. Geosci. Remote Sens. 2015, 53, 453–466. [Google Scholar] [CrossRef] [Green Version]
- Mikolajczyk, K.; Schmid, C. A performance evaluation of local descriptors. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 1615–1630. [Google Scholar] [CrossRef] [PubMed]
- Scaramuzza, P.; Micijevic, E.; Chander, G. SLC Gap-Filled Products Phase One Methodology. Available online: http://landsat.usgs.gov/documents/SLC_Gap_Fill_Methodology.pdf (accessed on 27 December 2017).
- Rignot, E.; Mouginot, J.; Scheuchl, B. Ice flow of the Antarctic ice sheet. Science 2011, 333, 1427–1430. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Wang, L.; Tang, S.; Jezek, K.C. Robust multi-scale image matching for deriving ice surface velocity field from sequential satellite images. Int. J. Remote Sens. 2012, 33, 1799–1822. [Google Scholar] [CrossRef]
- Lange, R.D.; Luckman, A.; Murray, T. Improvement of satellite radar feature tracking for ice velocity derivation by spatial frequency filtering. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2309–2318. [Google Scholar] [CrossRef]
- Cuffey, K.M.; Paterson, W.S.B. The Physics of Glaciers, 4th ed.; Academic Press: Amsterdam, The Netherlands, 2010. [Google Scholar]
- Hwang, C.; Yang, Y.; Kao, R.; Han, J.; Shum, C.K.; Galloway, D.L.; Sneed, M.; Hung, W.C.; Cheng, Y.S.; Li, F. Time-varying land subsidence detected by radar altimetry: California, Taiwan and north China. Sci. Rep. 2016, 6, 28160. [Google Scholar] [CrossRef] [PubMed]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Satellite | Image Serial Number | Date |
|---|---|---|---|
| 1 | Landsat 7 ETM+ | LE71251092004034EDC01 | 3 February 2004 |
| 2 | LE71261092005059PFS00 | 28 February 2005 | |
| 3 | LE71251092006055EDC00 | 2 February 2006 | |
| 4 | LE71251092006327EDC00 | 23 November 2006 | |
| 5 | LE71251092007330EDC00 | 26 November 2007 | |
| 6 | LE71251092007362EDC00 | 28 December 2007 | |
| 7 | LE71251092009063SGS00 | 4 March 2009 | |
| 8 | LE71251092010002EDC00 | 2 January 2010 | |
| 9 | LE71261092011028PFS00 | 28 January 2011 | |
| 10 | LE71251092011053EDC00 | 22 February 2011 | |
| 11 | LE71261092012063EDC01 | 3 March 2012 | |
| 12 | LE71261092013001EDC01 | 1 January 2013 | |
| 13 | Landsat 8 OLI | LC81241092013315LGN00 | 11 November 2013 |
| 14 | LC81261092014332LGN00 | 28 November 2014 | |
| 15 | LC81261092016098LGN00 | 7 April 2016 |
| Year | Satellite | Method | RMSE (m/a) | PSNR |
|---|---|---|---|---|
| 2007 | Landsat 7 ETM+ | Traditional | 25.24216 | 29.80270 |
| Rotation-invariant | 34.80662 | 27.48311 | ||
| 2008 | Traditional | 30.61754 | 28.59695 | |
| Rotation-invariant | 29.86574 | 28.81289 | ||
| 2009 | Traditional | 96.00242 | 18.67071 | |
| Rotation-invariant | 88.7001 | 19.35787 |
| Year | Satellite | Method | RMSE (m/a) | PSNR |
|---|---|---|---|---|
| 2007 | Landsat 7 ETM+ | Traditional | 27.33964 | 30.05594 |
| Rotation-invariant | 27.99202 | 29.76507 | ||
| 2008 | Traditional | 34.34982 | 27.65299 | |
| Rotation-invariant | 23.89376 | 31.53001 | ||
| 2009 | Traditional | 79.99973 | 21.80836 | |
| Rotation-invariant | 74.92907 | 22.76815 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, T.; Niu, M.; Yang, Y. Ice Velocity Variations of the Polar Record Glacier (East Antarctica) Using a Rotation-Invariant Feature-Tracking Approach. Remote Sens. 2018, 10, 42. https://doi.org/10.3390/rs10010042
Liu T, Niu M, Yang Y. Ice Velocity Variations of the Polar Record Glacier (East Antarctica) Using a Rotation-Invariant Feature-Tracking Approach. Remote Sensing. 2018; 10(1):42. https://doi.org/10.3390/rs10010042
Chicago/Turabian StyleLiu, Tingting, Muye Niu, and Yuande Yang. 2018. "Ice Velocity Variations of the Polar Record Glacier (East Antarctica) Using a Rotation-Invariant Feature-Tracking Approach" Remote Sensing 10, no. 1: 42. https://doi.org/10.3390/rs10010042
APA StyleLiu, T., Niu, M., & Yang, Y. (2018). Ice Velocity Variations of the Polar Record Glacier (East Antarctica) Using a Rotation-Invariant Feature-Tracking Approach. Remote Sensing, 10(1), 42. https://doi.org/10.3390/rs10010042