An Improved Predicted Model for BDS Ultra-Rapid Satellite Clock Offsets


Abstract
:
1. Introduction
2. BDS Satellite Orbits and Clock Status
3. Basic Predicted Model
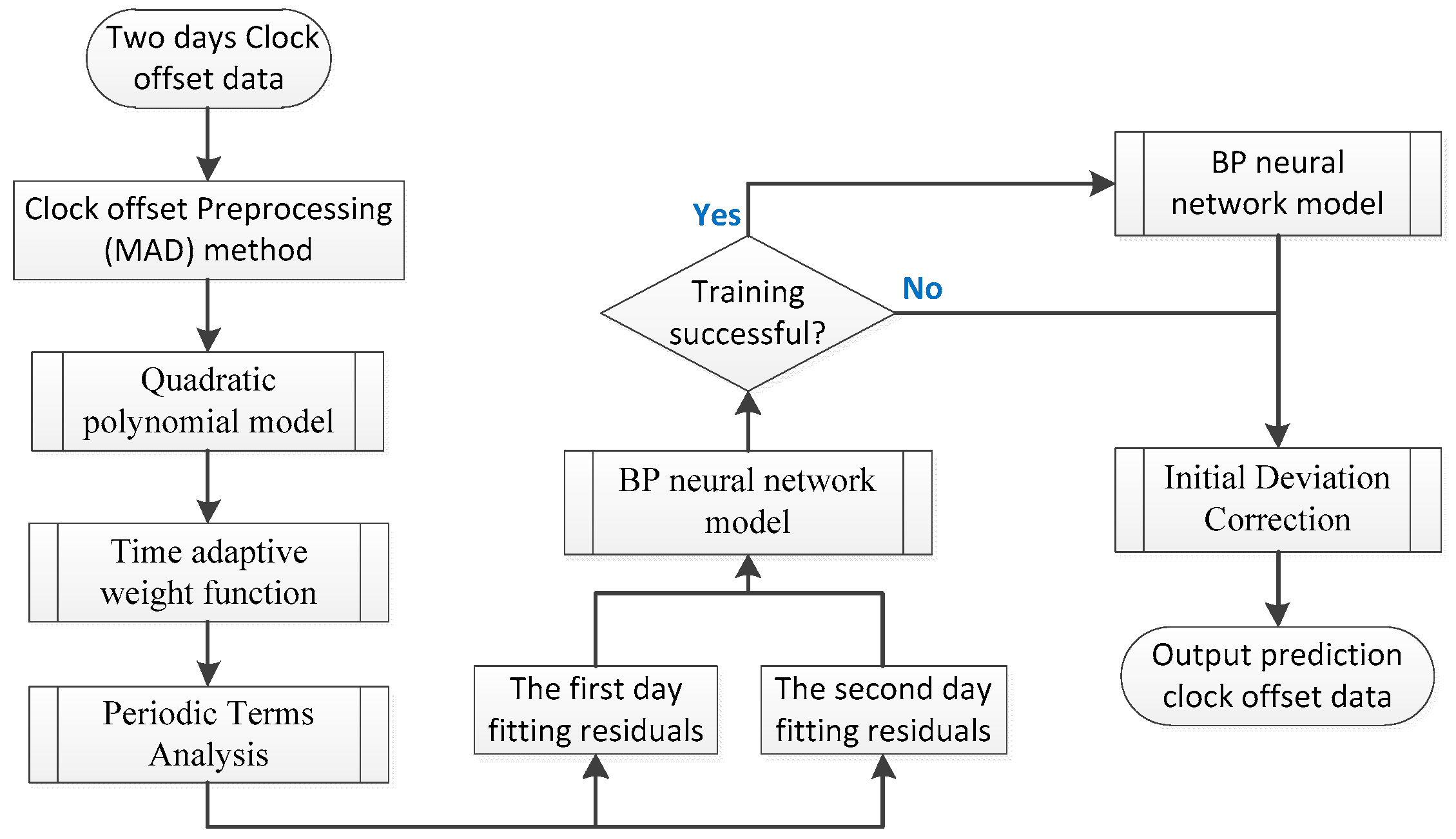
3.1. Preprocessing of Satellite Clock Offsets
3.2. Quadratic Polynomial Model
3.3. Time Adaptive Weight Function and Initial Deviation Correction
4. Improved Algorithms
4.1. Periodic Term Detection and Classified Compensation
4.2. Nonlinear Error Corrections by Using a BP Neural Network Model
4.3. Accuracy Assessment
5. Numeral Experiments
5.1. Prediction Accuracies Analysis
- Scheme 1: Prediction clock offsets using the improved model with no BP corrections (no-BP);
- Scheme 2: Prediction clock offsets using the improved model with BP corrections (with-BP);
- Scheme 3: Prediction clock offsets from the ISU product (ISU-P) and GBU product (GBU-P); and
- Scheme 4: Prediction clock offsets only using the BP algorithm as reference [26].
5.2. Real-Time Precise Point Positioning Experiment
6. Discussion
7. Conclusions
- (1)
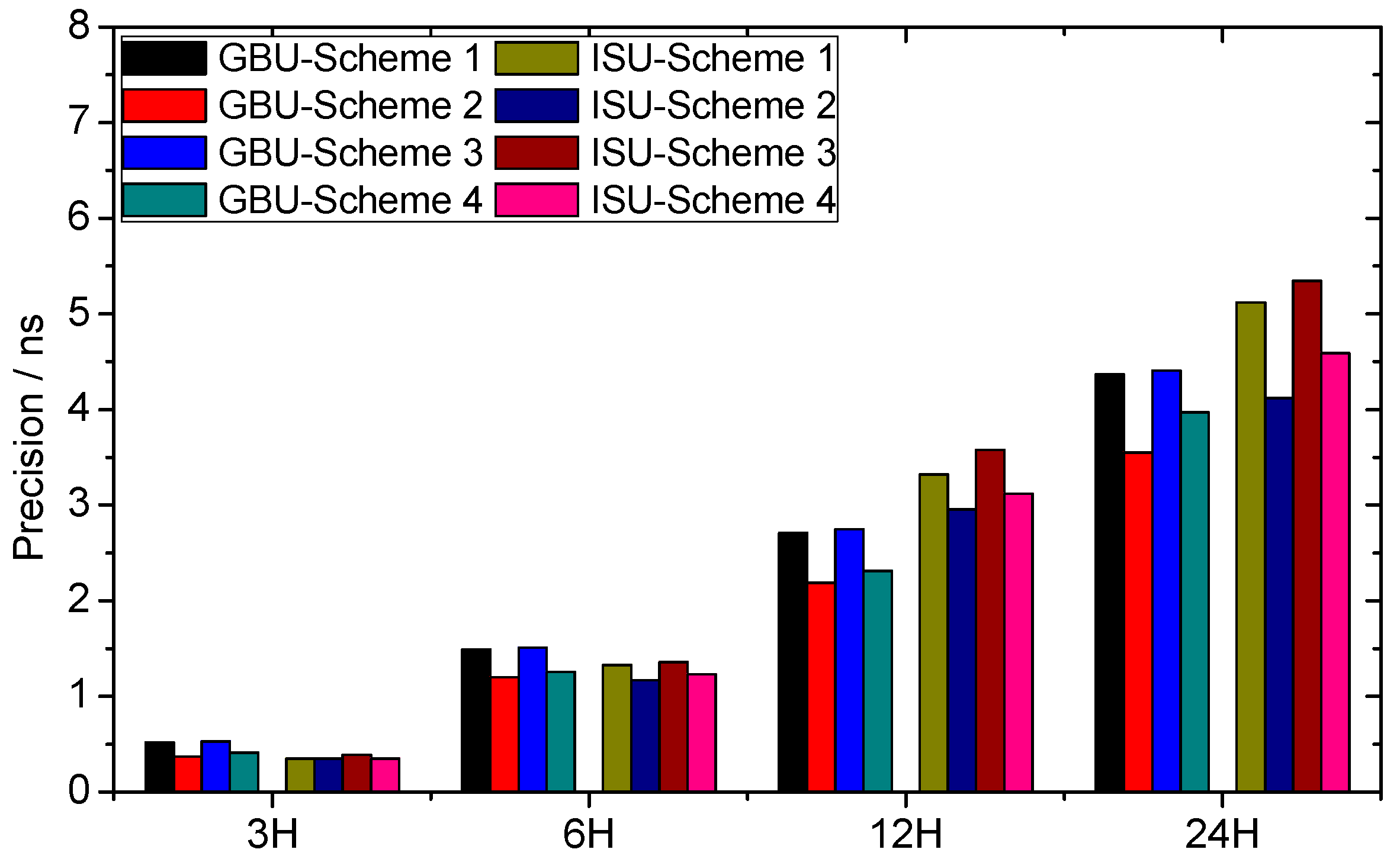
- Compared to ISU-P products, the average improvements using the proposed model in 3 h, 6 h, 12 h, and 24 h are 23.1%, 21.3%, 20.2%, and 19.8%, respectively. Meanwhile the accuracy improvements of the proposed model are 9.9%, 13.9%, 17.3%, and 21.2% compared to GBU-P products.
- (2)
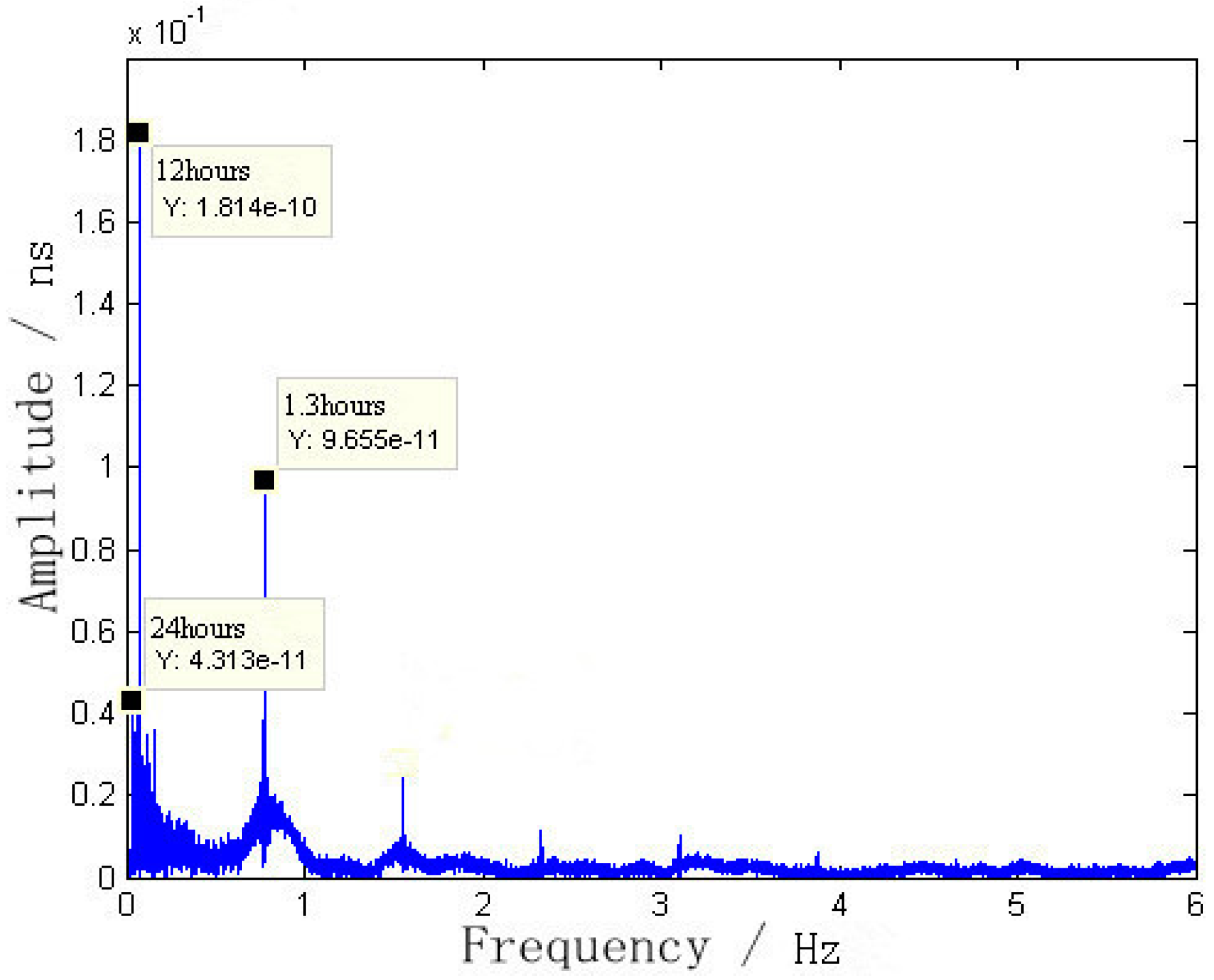
- The analyzed results of periodic terms show that the main significant periods of GEO and IGSO are 24 h and 12 h, while that of MEO are 12 h and 6 h. Specially, C11 has a significant periodic term of about 1.3 h, which is different from other MEOs. The first and second periodic terms both are evident and should be compensated in the BDS clock offsets prediction.
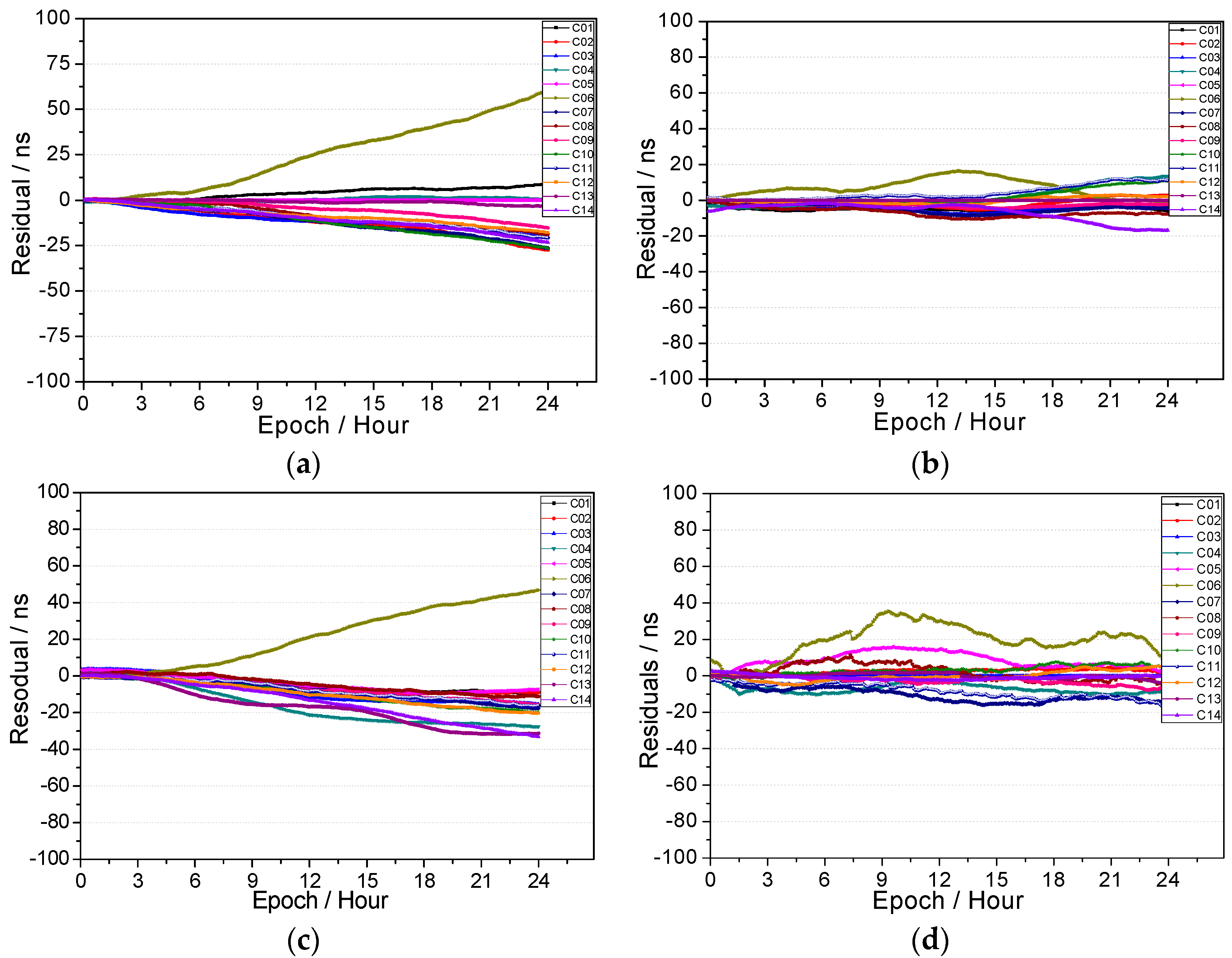
- (3)
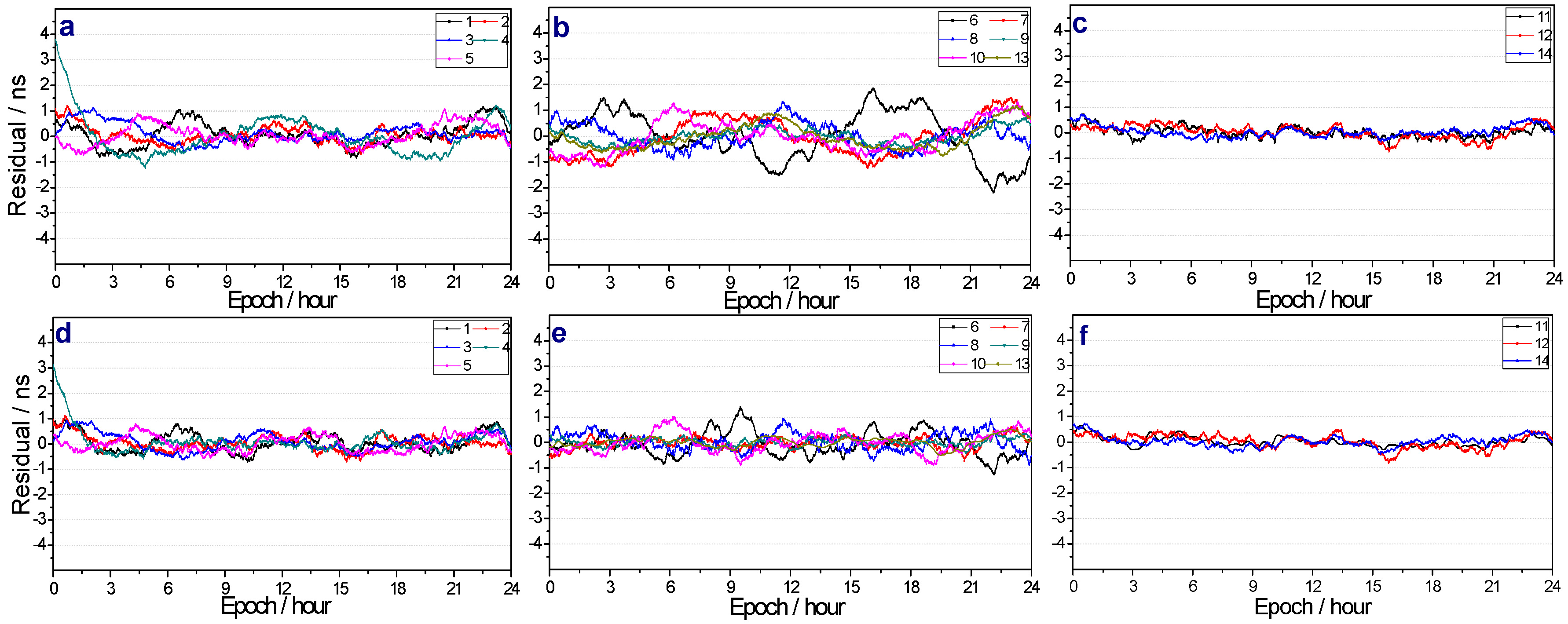
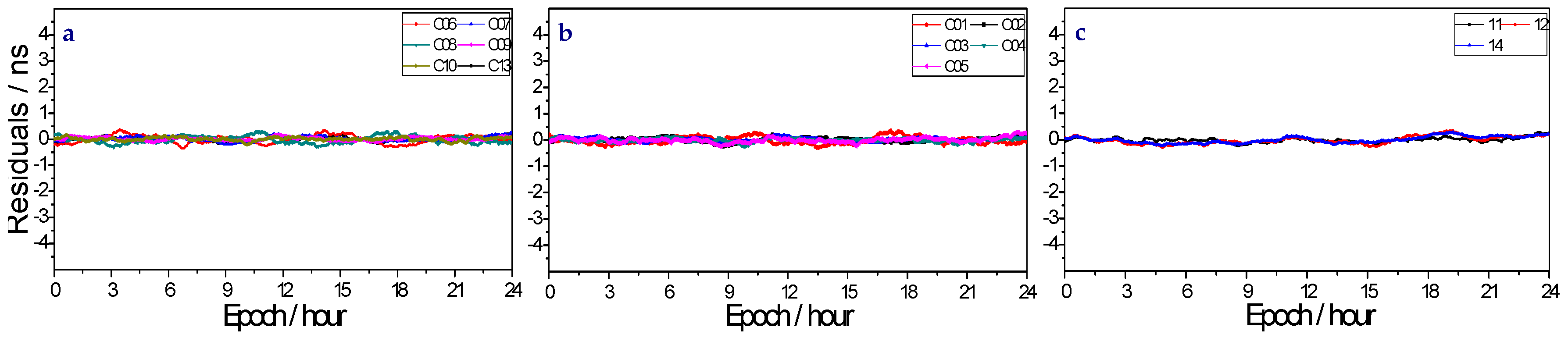
- The fitting residuals show that, the accuracies of the old BDS satellites clocks are worse than that of other young satellites. Therefore, evidently, the performance of BDS satellite clocks may degrade during the increase in service years.
- (4)
- The RTPPP accuracies based on the proposed clock model are superior to 0.2 m and have improved about 16%, 14%, and 38% in N, E, and U directions, respectively.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ahmed, E.M.; Manoj, D. Maintaining real-time precise point positioning during outages of orbit and clock corrections. GPS Solut. 2016, 21, 1–11. [Google Scholar] [CrossRef]
- Yang, Y.X.; Cui, X.Q. Adaptively Robust Filter with Multi Adaptive Factors. Surv. Rev. 2008, 40, 260–270. [Google Scholar] [CrossRef]
- Yang, Y.X.; Song, L.J.; Xu, T.H. Robust Estimator for Correlated Observations Based on Bifactor Equivalent Weights. J. Geod. 2002, 76, 353–358. [Google Scholar] [CrossRef]
- Zhao, Q.L.; Guo, J.; Li, M.; Qu, L.; Hu, Z.; Shi, C.; Liu, J. Initial results of precise orbit and clock determination for COMPASS navigation satellite system. J. Geod. 2013, 87, 475–486. [Google Scholar] [CrossRef]
- Gao, Y.; Chen, K. Performance analysis of precise point positioning using real-time orbit and clock products. J. Glob. Position. Syst. 2004, 1, 95–100. [Google Scholar] [CrossRef]
- Kouba, J.; Heroux, P. Precise Point Positioning using IGS orbit and clock products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Kouba, J.; Springer, T. New IGS station and satellite clock combination. GPS Solut. 2001, 4, 31–36. [Google Scholar] [CrossRef]
- Wang, B.; Lou, Y.D.; Liu, J.; Zhao, Q.; Su, X. Analysis of BDS satellite clocks in orbit. GPS Solut. 2016, 20, 783–794. [Google Scholar] [CrossRef]
- Huang, G.W.; Zhang, Q. Quality variation of GPS satellite clocks on-orbit using IGS clock products. Adv. Space Res. 2013, 51, 978–987. [Google Scholar] [CrossRef]
- Huang, G.W.; Yu, H.; Guo, H.R.; Zhang, J.Q.; Fu, W.J.; Tian, J. Analysis of the Mid-Long Term Characterization for BDS On-Orbit Satellite Clocks; Geomatics and Information Science of Wuhan University: Wuhan, China, 2015; Volume 42, pp. 982–988. [Google Scholar] [CrossRef]
- Montenbruck, O.; Hauschild, A.; Steigenberger, P.; Hugentobler, U.; Teunissen, P.; Nakamura, S. Initial assessment of the COMPASS/BeiDou-2 regional navigation satellite system. GPS Solut. 2012, 17, 211–222. [Google Scholar] [CrossRef]
- Busca, G.; Wang, Q. Time prediction accuracy for a space clock. Metrologia 2003, 40, 265–269. [Google Scholar] [CrossRef]
- Senior, K.L.; Ray, J.R.; Beard, R.L. Characterization of periodic variations in the GPS satellite clocks. GPS Solut. 2008, 12, 211–225. [Google Scholar] [CrossRef]
- Huang, G.W.; Zhang, Q. Real-time clock offset prediction with an improved model. GPS Solut. 2014, 18, 95–104. [Google Scholar] [CrossRef]
- Heo, Y.J.; Cho, J. Improving prediction accuracy of GPS satellite clocks with periodic variation behavior. Meas. Sci. Technol. 2010, 21, 073001. [Google Scholar] [CrossRef]
- Huang, G.W.; Zhang, Q. Real-time Estimation of Satellite Clock Offset Using Adaptively Robust Kalman Filter with Classified adaptive Factors. GPS Solut. 2012, 16, 531–539. [Google Scholar] [CrossRef]
- Lv, Y.; Dai, Z.; Zhao, Q.; Yang, S.; Zhou, J.; Liu, J. Improved Short-Term Clock Prediction Method for Real-Time Positioning. Sensors 2017, 17, 1308. [Google Scholar] [CrossRef] [PubMed]
- Ge, M.R.; Gendt, G.; Dick, G.; Zhang, F.P.; Rothacher, M. A New Data Processing Strategy for Huge GNSS Global Networks. J. Geod. 2006, 80, 199–203. [Google Scholar] [CrossRef]
- Ge, M.R.; Chen, J.P.; Dousa, J. A Computationally Efficient Approach for Estimating High-rate Satellite Clock Corrections in Real-time. GPS Solut. 2011, 15, 9–17. [Google Scholar] [CrossRef]
- Hauschild, A.; Montenbruck, O.; Sleewaegen, J.M.; Huisman, L.; Teunissen, P.J. Characterization of compass M-1 signals. GPS Solut. 2012, 16, 117–126. [Google Scholar] [CrossRef]
- Liu, H.; Cheng, X. GNSS Performance Research for MEO, GEO, and HEO. China Satellite Navigation Conference (CSNC) 2017 Proceedings, 8th ed.; Sun, J., Liu, J., Yang, Y., Eds.; Springer: Singapore, 2017; Volume 3, pp. 37–45. ISBN 978-981-10-4594-3. [Google Scholar]
- Steigenberger, P.; Hugentobler, U.; Hauschild, A.; Montenbruck, O. Orbit and clock analysis of Compass GEO and IGSO satellites. J. Geod. 2013, 87, 515–525. [Google Scholar] [CrossRef]
- Huang, G.W. Research on Algorithms of Precise Clock Offset and Quality. Ph.D. Thesis, Chang’an University, Xian, China, 2012. [Google Scholar]
- Hauschild, A.; Montenbruck, O.; Steigenberger, P. Short-term analysis of GNSS clocks. GPS Solut. 2012, 17, 295–307. [Google Scholar] [CrossRef]
- Huang, G.W.; Yang, Y.X.; Zhang, Q. Estimation and Predict Satellite Clock Error Using Adaptively Robust Sequential Adjustment with Classified Adaptive Factors Based on Opening Windows. Acta Geodaetica et Cartographica Sinica 2011, 40, 15–21. [Google Scholar]
- Wang, Y.P.; Lu, Z.P.; Qu, Y.; Li, L.; Wang, N. Improving prediction performance of GPS satellite clock bias based on wavelet neural network. GPS Solut. 2016, 21, 1–12. [Google Scholar] [CrossRef]
- Guo, H.R.; Yang, Y.X. Analyses of Main Error Sources on Time-Domain Frequency Stability for Atomic Clocks of Navigation Satellites; Geomatics and Information Science of Wuhan University: Wuhan, China, 2009; Volume 34, pp. 218–221. [Google Scholar]
- Galleani, L.; Sacerdote, L. A Mathematical Model for the Atomic Clock Error in Case of Jumps. Metrologia 2003, 40, 257–264. [Google Scholar] [CrossRef]
- Panfilo, G.; Tavella, P. Atomic clock prediction based on stochastic differential equations. Metrologia 2008, 45, 108–116. [Google Scholar] [CrossRef]
- Yeh, T.K.; Wang, C.S.; Chao, B.F.; Chen, C.S.; Lee, C.W. Automatic data-quality monitoring for continuous GPS tracking stations in Taiwan. Metrologia 2007, 44, 393–401. [Google Scholar] [CrossRef]
- Yeh, T.K.; Chung, Y.D.; Wu, C.T.; Wang, C.S.; Zhang, K.; Chen, C.H. Identifying the relationship between GPS data quality and positioning precision: Case study on IGS tracking stations. Hum. Geogr. 2012, 138, 136–142. [Google Scholar] [CrossRef]
- Yeh, T.K.; Hwang, C.; Xu, G.; Wang, C.S.; Lee, C.C. Determination of global positioning system (GPS) receiver clock errors: Impact on positioning accuracy. Meas. Sci. Technol. 2009, 20, 075105. [Google Scholar] [CrossRef]
- Mangoubi, R. Robust Estimation and Failure Detection: A Concise Treatment; Springer: London, UK; New York, NY, USA, 1998. [Google Scholar]
- Kaplan, E.D.; Hegarty, C. Understanding GPS: Principles and Applications, 1st ed.; House Publishers: Boston, MA, USA; London, UK, 1996; ISBN 0-89006-793-7. [Google Scholar]
- Spilker, J.J., Jr.; Axelrad, P.; Parkinson, B.W.; Enge, P. Global Positioning System: Theory and Applications, 1st ed.; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1996; Volume 1, ISBN 978-1-56347-106-3. [Google Scholar]
- Greengard, L.; Lee, J. Accelerating the Non-uniform Fast Fourier Transform. SIAM Rev. 2004, 46, 443–454. [Google Scholar] [CrossRef]
- Yang, Y.X.; Zeng, A.M. Adaptive filtering for deformation parameter estimation in consideration of geometrical measurements and geophysical models. Sci. China Ser. D-Earth Sci. 2009, 52, 1216–1222. [Google Scholar] [CrossRef]
- Tabaraki, R.; Khayamian, T.; Ensafi, A. Solubility prediction of 21 azo dyes in supercritical carbon dioxide using wavelet neural network. Dyes Pigments 2007, 73, 230–238. [Google Scholar] [CrossRef]
- Xu, B.; Wang, Y.; Yang, X. Navigation Satellite Clock Error Prediction Based on Functional Network. Neural Process. Lett. 2013, 38, 305–320. [Google Scholar] [CrossRef]
- Gao, X.Z.; Ovaska, S. Genetic algorithm training of Elman neural network in motor fault detection. Neural Comput. Appl. 2002, 11, 37–44. [Google Scholar] [CrossRef]
- Ibnkahla, M.; Eurasip, J. Nonlinear System Identification Using Neural Networks Trained with Natural Gradient Descent. Adv. Signal Process. 2003, 574805, 1229–1237. [Google Scholar] [CrossRef]
- Castillo, E. Functional Networks. Neural Process. Lett. 1998, 7, 151–159. [Google Scholar] [CrossRef]
- Castillo, E.; Cobo, A.; Gutiérrez, J.M.; Pruneda, R.E. Functional Networks with Applications: A Neural-Based Paradigm; Kluwer Academic Publishers: Boston, MA, USA, 1999; pp. 263–281. ISBN 9781461375623. [Google Scholar]
- Bruen, M.; Yang, J. Functional networks in real-time flood forecasting—A novel application. Adv. Water Resour. 2005, 28, 899–909. [Google Scholar] [CrossRef]
- David, E.R.; Geoffrey, E.H.; Ronald, J.W. Learning representations by back-propagating errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Kerh, T.; Gunaratnam, D.; Chan, Y. Neural computing with genetic algorithm in evaluating potentially hazardous metropolitan areas result from earthquake. Neural Comput. Appl. 2010, 19, 521–529. [Google Scholar] [CrossRef]
- Yassami, M.; Ashtari, P. Using fuzzy genetic, Artificial Bee Colony (ABC) and simple genetic algorithm for the stiffness optimization of steel frames with semi-rigid connections. KSCE J. Civ. Eng. 2015, 19, 1366–1374. [Google Scholar] [CrossRef]
- Bufler, H.; Nguyen-Tuong, B. On the work theorems in nonlinear network theory. Arch. Appl. Mech. 1980, 49, 275–286. [Google Scholar] [CrossRef]
- Shaltaf, S.; Eurasip, J. Neural-Network-Based Time-Delay Estimation. Adv. Signal Process. 2004, 2004, 654087. [Google Scholar] [CrossRef]
- Zeng, X.; Martinez, T.R. Using a Neural Network to Approximate an Ensemble of Classi¢ers. Neural Process. Lett. 2000, 12, 225–237. [Google Scholar] [CrossRef]
- Frazzoli, E.; Dahleh, M. Dynamic Systems and Control, 1st ed.; MIT OpenCourseWare, Amercia; Massachusetts Institute of Technology: Cambridge, MA, USA, 2011; pp. 438–455. ISBN 978-0-12-012779-5. [Google Scholar]
- Aaron, M.; Kojiro, I. Inversion of a velocity model using artificial neural networks. Comput. Geosci. 2010, 36, 1474–1483. [Google Scholar] [CrossRef]
- Asimakopoulou, G.; Kontargyri, V.; Tsekouras, G.; Asimakopoulou, F.; Gonos, I.; Stathopulos, I. Artificial neural network optimization methodology for the estimation of the critical flashover voltage on insulators. IET Sci. Meas. Technol. 2009, 3, 90–104. [Google Scholar] [CrossRef]
- Garcia-Pedrajas, N.; Hervas-Martinez, C.; Munoz-Perez, J. Acooperative coevolutionary model for evolving artificial neural networks. IEEE Trans. Neural Netw. 2003, 14, 575–596. [Google Scholar] [CrossRef] [PubMed]
- Hamed, C.; Nima, A.; Hamidreza, Z. Wind power forecast using wavelet neural network trained by improved clonal selection algorithm. Energy Convers. Manag. 2015, 89, 588–598. [Google Scholar] [CrossRef]
- Li, X. Comparing the Kalman filter with a Monte Carlo-based artificial neural network in the INS/GPS vector gravimetric system. J. Geod. 2009, 83, 797–804. [Google Scholar] [CrossRef]
- Helmholtz-Zentrum Potsdam, GFZ German Research Centre for Geosciences. Available online: ftp://ftp.gfz-potsdam.de/pub/GNSS/products/mgnss/ (accessed on 3 January 2018).
- International GNSS Monitoring & Assessment System. Available online: http://www.igmas.org/ (accessed on 3 January 2018).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Generation | Lunch Date | Orbit | Status | PRN | Equipment Clock 1 | Serve Time (Month) |
|---|---|---|---|---|---|---|
| BDS-1 | 2000.10.31 | GEO | Not usable | S-1 | Rb | None |
| 2000.12.21 | GEO | Not usable | S-2 | Rb | None | |
| 2003.05.25 | GEO | Not usable | S-3 | Rb | None | |
| 2007.02.03 | GEO | Not usable | S-4 | Rb | None | |
| BDS-2 | 2007.04.14 | MEO | Not usable | None | Rb | None |
| 2009.04.15 | GEO | Not usable | C02 | Rb | 69 | |
| 2010.01.17 | GEO | normal | C01 | Rb | 86 | |
| 2010.06.02 | GEO | normal | C03 | Rb | 81 | |
| 2010.08.01 | IGSO | normal | C06 | Rb | 79 | |
| 2010.11.01 | GEO | normal | C04 | Rb | 76 | |
| 2010.12.18 | IGSO | normal | C07 | Rb | 75 | |
| 2011.04.10 | IGSO | normal | C08 | Rb | 71 | |
| 2011.07.27 | IGSO | normal | C09 | Rb | 68 | |
| 2011.12.02 | IGSO | normal | C10 | Rb | 64 | |
| 2012.02.25 | GEO | normal | C05 | Rb | 62 | |
| 2012.04.30 | MEO | normal | C11, C12 | Rb | 59 | |
| 2012.09.19 | MEO | normal | C13, C14 | Rb | 53 | |
| 2012.10.25 | GEO | normal | C02 | Rb | 52 | |
| 2015.03.30 | IGSO | normal | C15 switched to C13 | Rb | 23 | |
| 2016.06.12 | GEO | Not usable | G7 | Rb | 8 | |
| BDS-3 Test | 2015.07.25 | MEO | normal | C33, C34 | Rb | 19 |
| 2015.09.30 | IGSO | normal | C32 | H | 17 | |
| 2016.02.01 | MEO | normal | C35 | Rb | 12 | |
| 2016.03.30 | IGSO | normal | C31 | Rb | 11 |
| BDS Satellites | Main Periodic (h) | Amplitude (ns) | Secondary Periodic (h) | Amplitude (ns) |
|---|---|---|---|---|
| C01 | 23.9 | 0.19 | 6.00 | 0.12 |
| C02 | 24.0 | 0.22 | 12.0 | 0.13 |
| C03 | 18.8 | 0.24 | 15.8 | 0.14 |
| C04 | 23.9 | 0.25 | 11.8 | 0.10 |
| C05 | 23.9 | 0.30 | 12.0 | 0.15 |
| C06 | 12.8 | 0.51 | 16.5 | 0.13 |
| C07 | 23.9 | 0.31 | 12.0 | 0.12 |
| C08 | 23.9 | 0.26 | 12.0 | 0.13 |
| C09 | 23.9 | 0.25 | 12.0 | 0.13 |
| C10 | 23.9 | 0.29 | 12.0 | 0.10 |
| C11 | 12.5 | 0.18 | 1.30 | 0.10 |
| C12 | 12.3 | 0.21 | 6.30 | 0.09 |
| C13 | 24.0 | 0.28 | 12.0 | 0.08 |
| C14 | 12.4 | 0.19 | 6.20 | 0.09 |
| Time Length | GBU (ns) | ISU (ns) | ||||
|---|---|---|---|---|---|---|
| Scheme 3 | Scheme 4 | Scheme 2 | Scheme 3 | Scheme 4 | Scheme 2 | |
| 3 h | 0.53 | 0.41 | 0.37 | 0.39 | 0.35 | 0.35 |
| 6 h | 1.51 | 1.26 | 1.20 | 1.36 | 1.23 | 1.17 |
| 12 h | 2.75 | 2.31 | 2.19 | 3.58 | 3.12 | 2.96 |
| 24 h | 4.41 | 3.97 | 3.55 | 5.35 | 4.59 | 4.22 |
| Station Name | N (m) | E (m) | U (m) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ISU-P | M1 | GBU-P | M 1 | ISU-P | M 1 | GBU-P | M 1 | ISU-P | M 1 | GBU-P | M 1 | |
| HARB | 0.096 | 0.085 | 0.085 | 0.077 | 0.095 | 0.071 | 0.097 | 0.081 | 0.157 | 0.101 | 0.203 | 0.139 |
| MAL2 | 0.106 | 0.097 | 0.113 | 0.099 | 0.113 | 0.109 | 0.135 | 0.122 | 0.186 | 0.132 | 0.198 | 0.132 |
| KRCH | 0.084 | 0.079 | 0.096 | 0.081 | 0.096 | 0.081 | 0.112 | 0.105 | 0.174 | 0.119 | 0.251 | 0.146 |
| JFNG | 0.12 | 0.105 | 0.113 | 0.105 | 0.14 | 0.126 | 0.121 | 0.102 | 0.203 | 0.142 | 0.204 | 0.152 |
| NRMG | 0.057 | 0.049 | 0.063 | 0.056 | 0.071 | 0.065 | 0.065 | 0.052 | 0.196 | 0.153 | 0.189 | 0.113 |
| KARR | 0.046 | 0.041 | 0.053 | 0.049 | 0.063 | 0.061 | 0.051 | 0.043 | 0.179 | 0.127 | 0.174 | 0.097 |
| NNOR | 0.107 | 0.085 | 0.129 | 0.101 | 0.143 | 0.103 | 0.087 | 0.065 | 0.198 | 0.103 | 0.352 | 0.132 |
| PNGM | 0.075 | 0.059 | 0.097 | 0.079 | 0.067 | 0.059 | 0.127 | 0.099 | 0.173 | 0.135 | 0.352 | 0.098 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, G.; Cui, B.; Zhang, Q.; Fu, W.; Li, P. An Improved Predicted Model for BDS Ultra-Rapid Satellite Clock Offsets. Remote Sens. 2018, 10, 60. https://doi.org/10.3390/rs10010060
Huang G, Cui B, Zhang Q, Fu W, Li P. An Improved Predicted Model for BDS Ultra-Rapid Satellite Clock Offsets. Remote Sensing. 2018; 10(1):60. https://doi.org/10.3390/rs10010060
Chicago/Turabian StyleHuang, Guanwen, Bobin Cui, Qin Zhang, Wenju Fu, and Pingli Li. 2018. "An Improved Predicted Model for BDS Ultra-Rapid Satellite Clock Offsets" Remote Sensing 10, no. 1: 60. https://doi.org/10.3390/rs10010060
APA StyleHuang, G., Cui, B., Zhang, Q., Fu, W., & Li, P. (2018). An Improved Predicted Model for BDS Ultra-Rapid Satellite Clock Offsets. Remote Sensing, 10(1), 60. https://doi.org/10.3390/rs10010060