Improved Modeling of Global Ionospheric Total Electron Content Using Prior Information


Abstract
:
1. Introduction
2. Bayesian Estimation for TEC Modeling
2.1. Basic Methodology
2.2. Estimation Using Priori Information
3. Results and Analysis
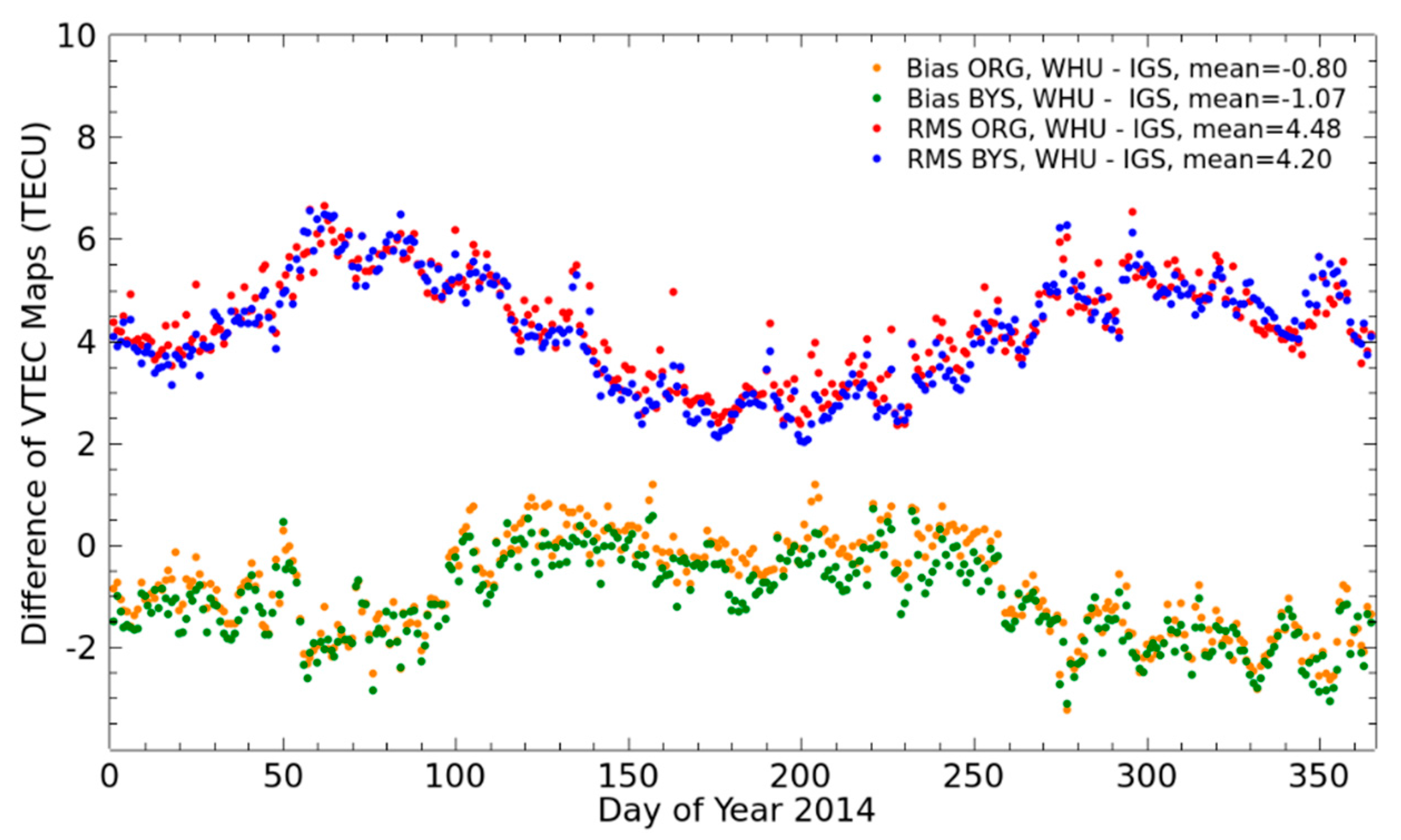
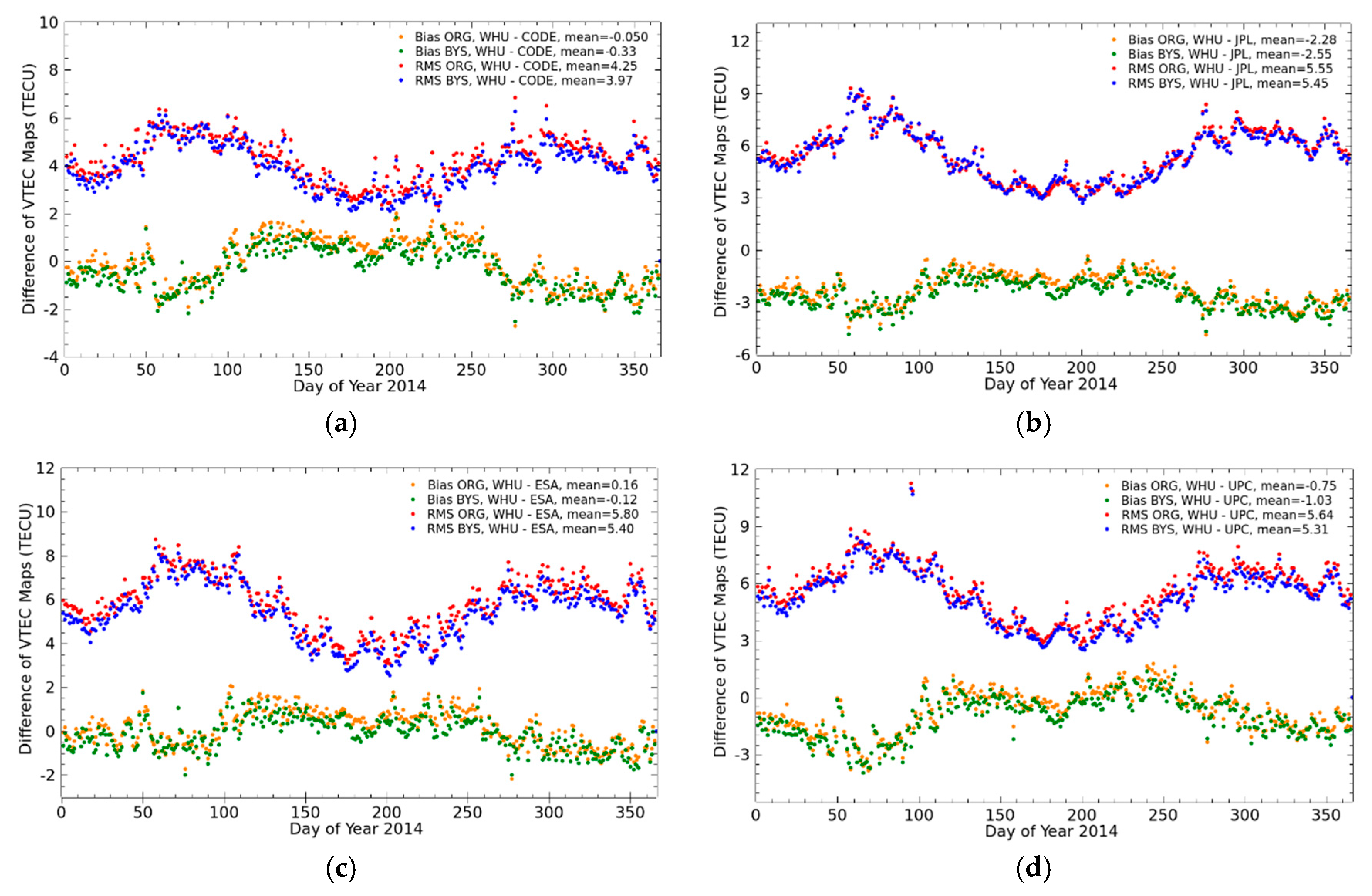
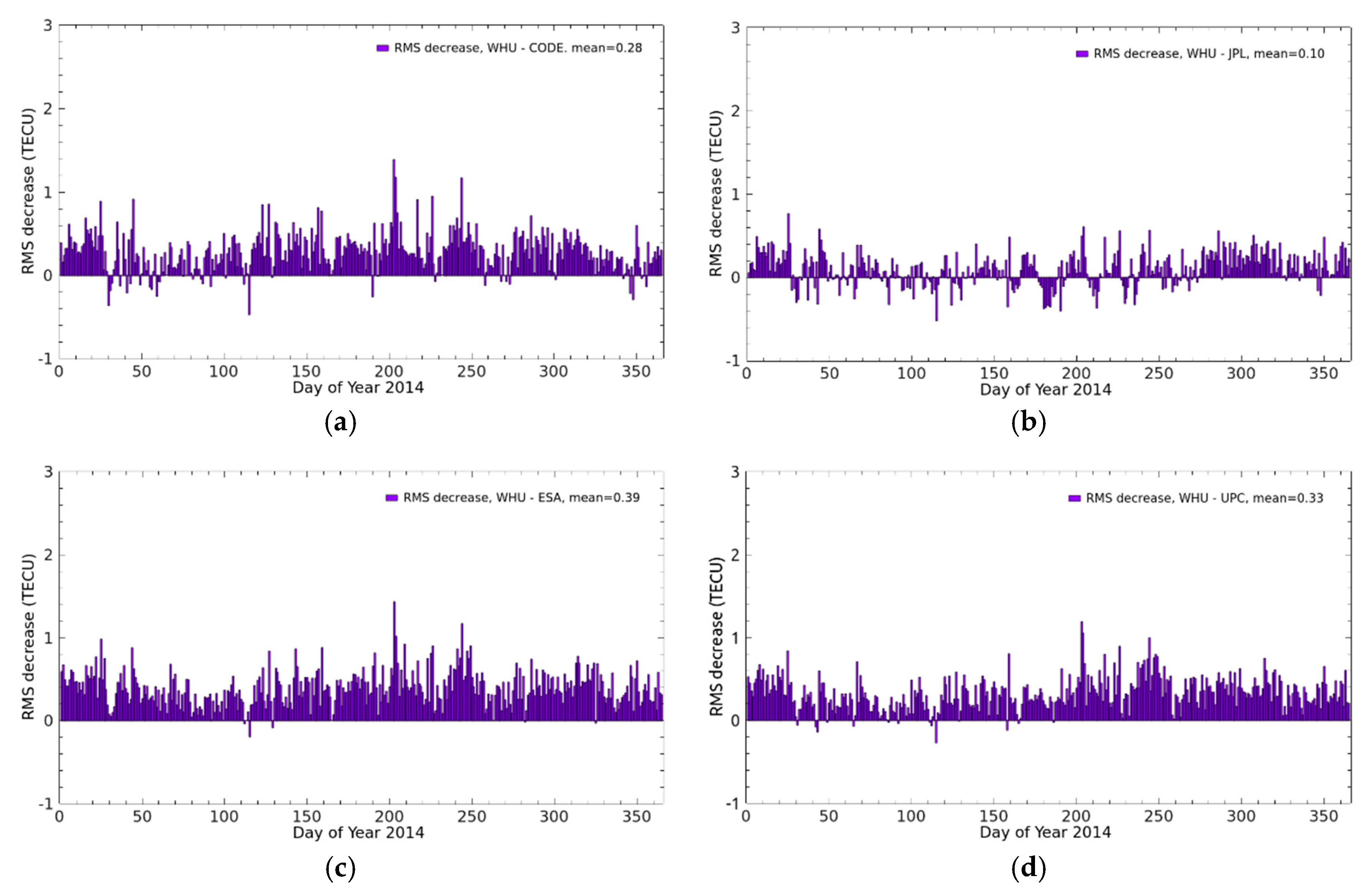
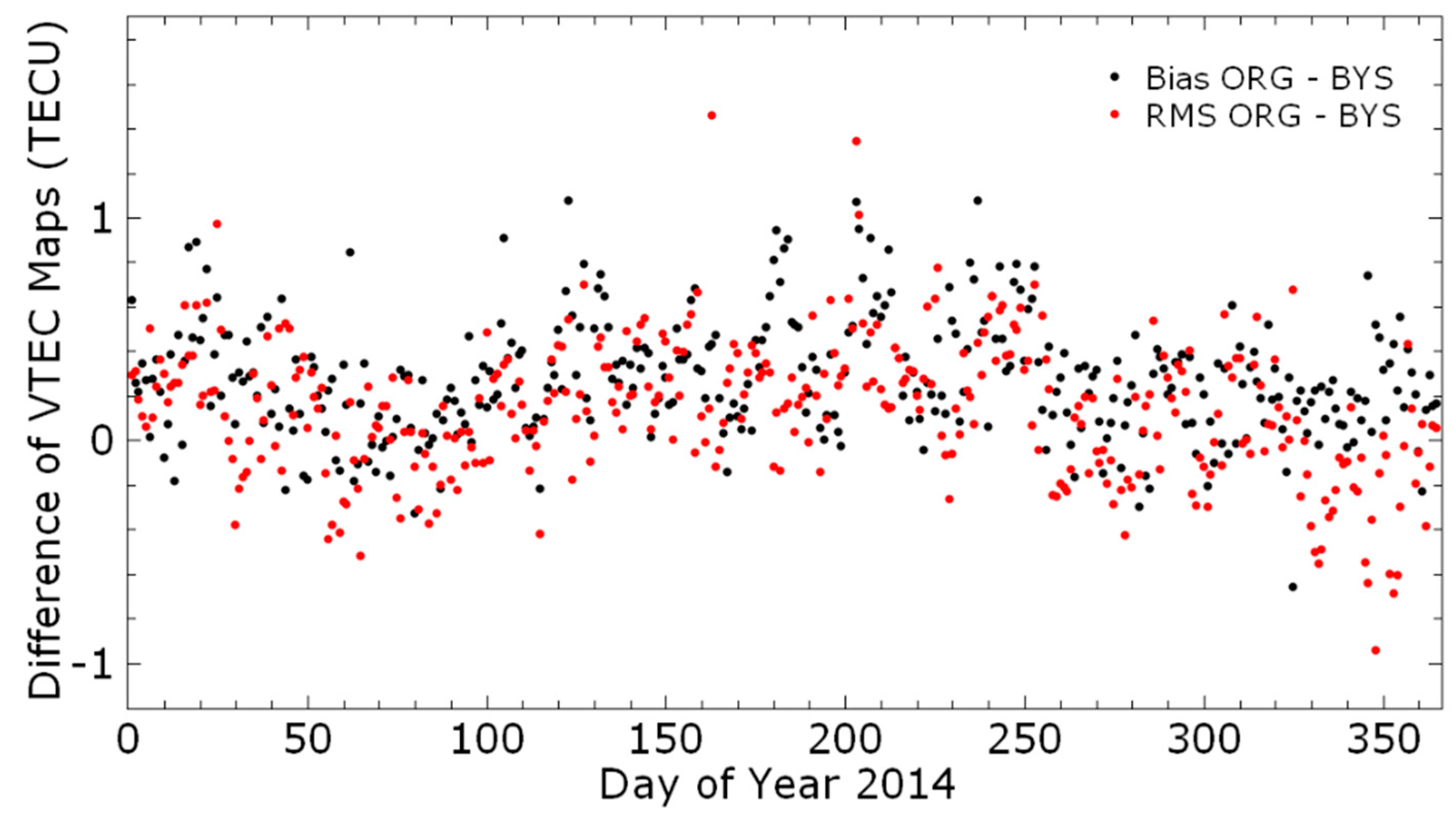
3.1. Comparison of VTEC Maps
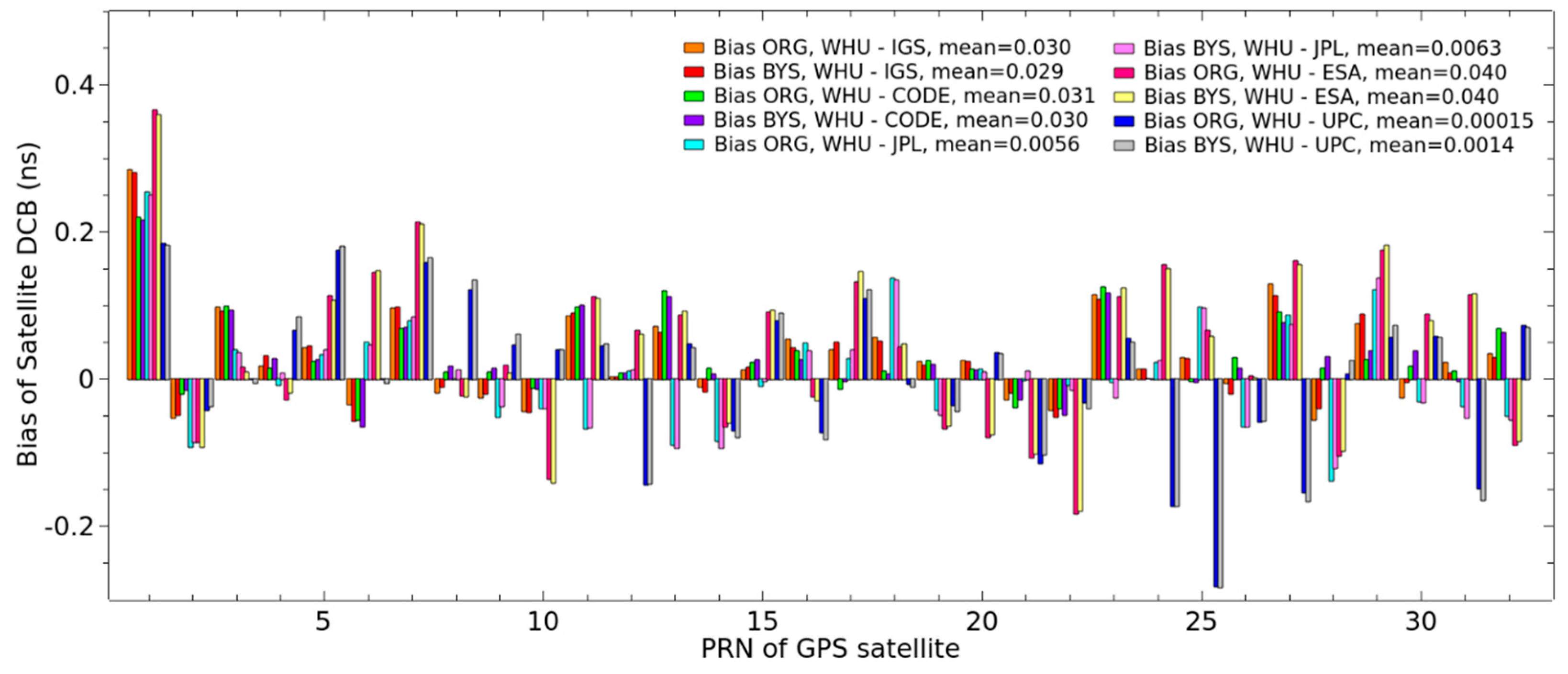
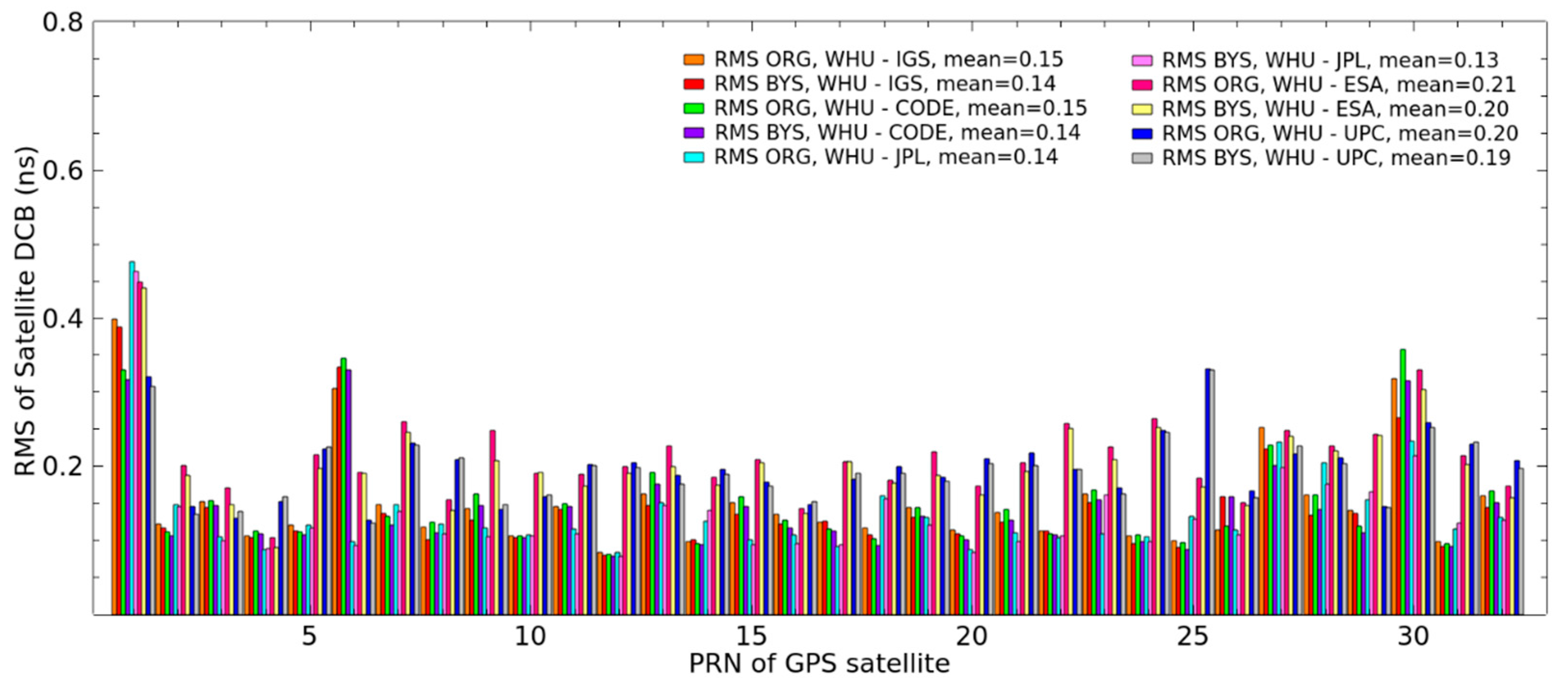
3.2. Comparison of Satellites DCBs
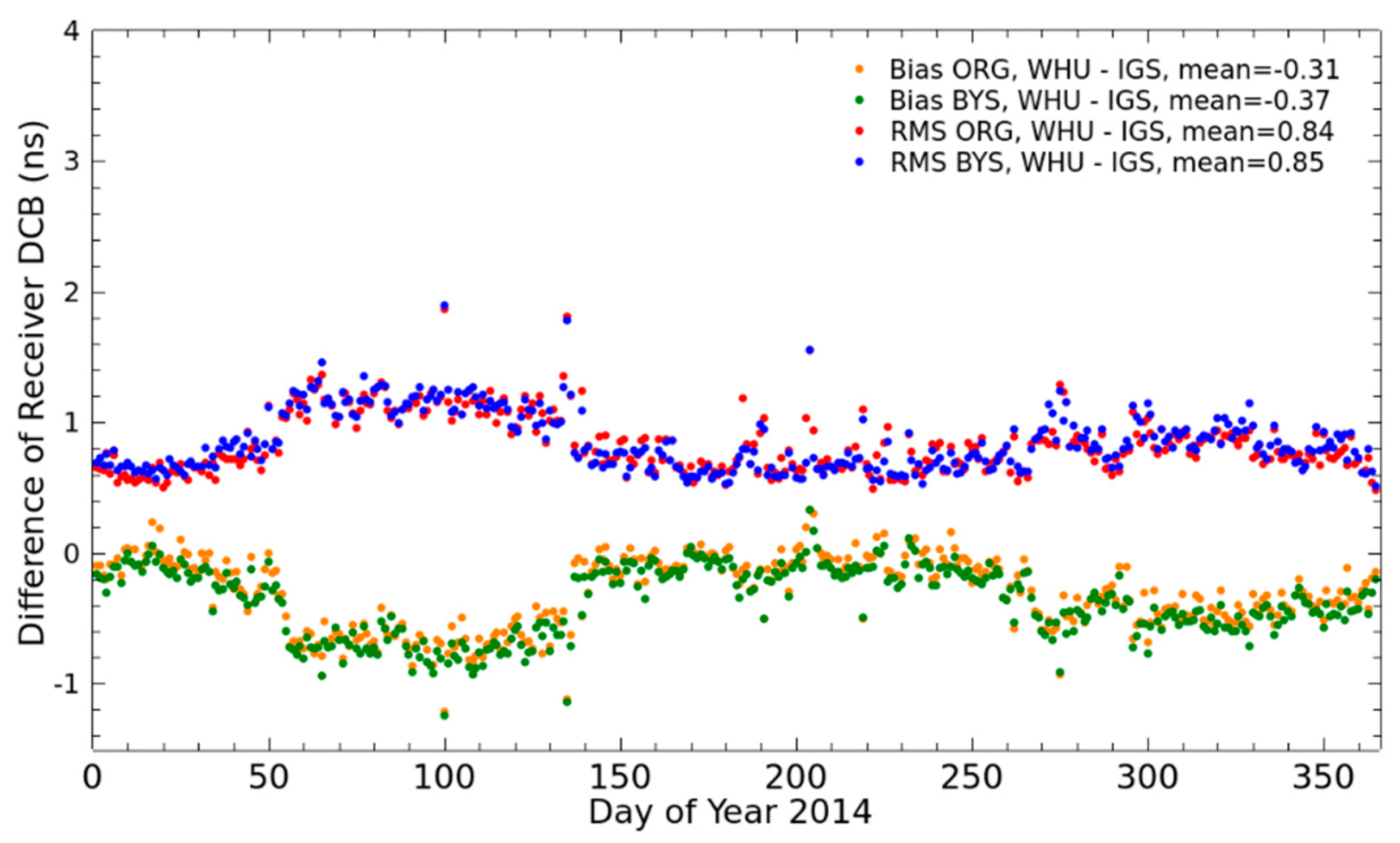
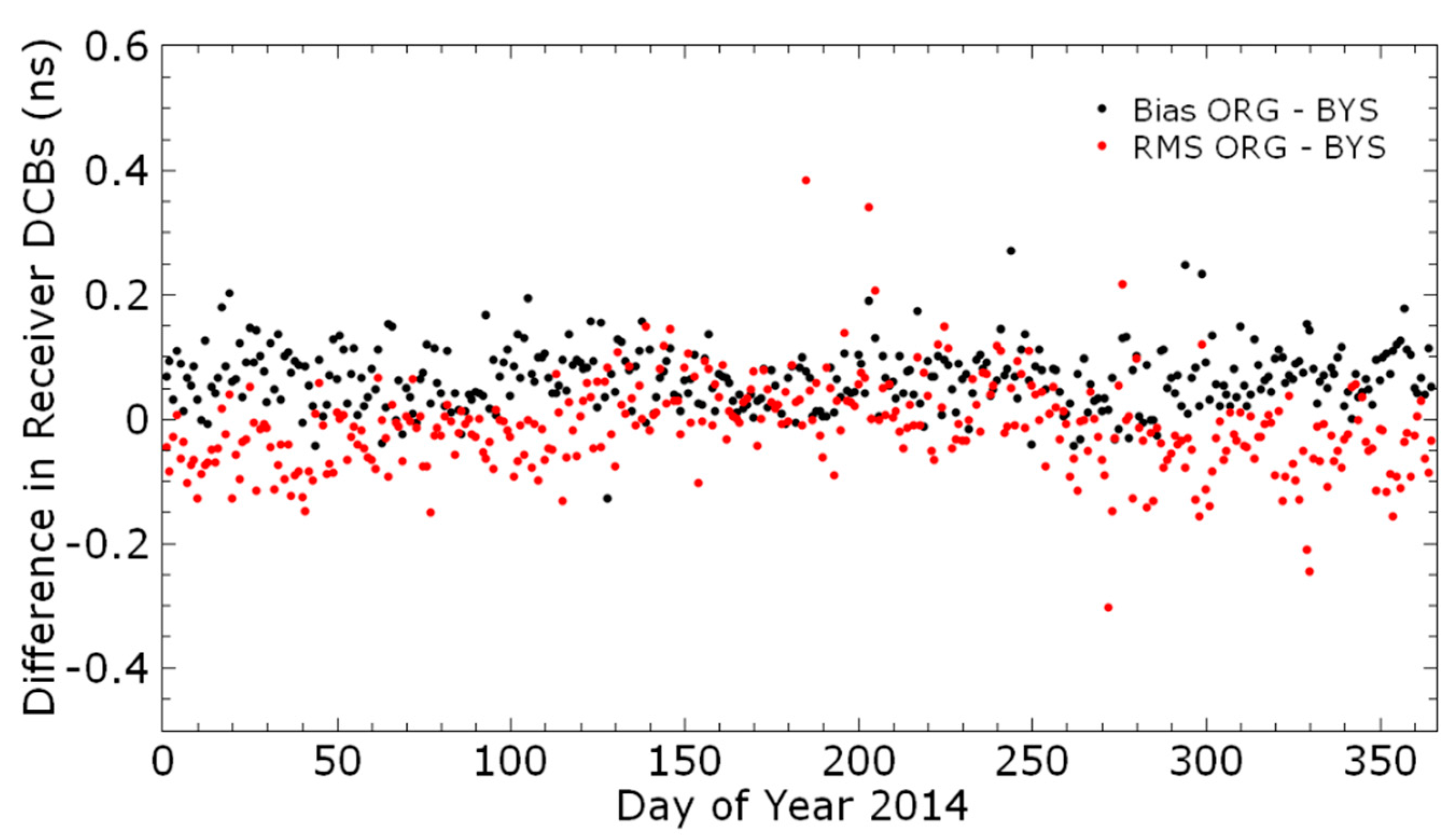
3.3. Comparison of Receiver DCBs
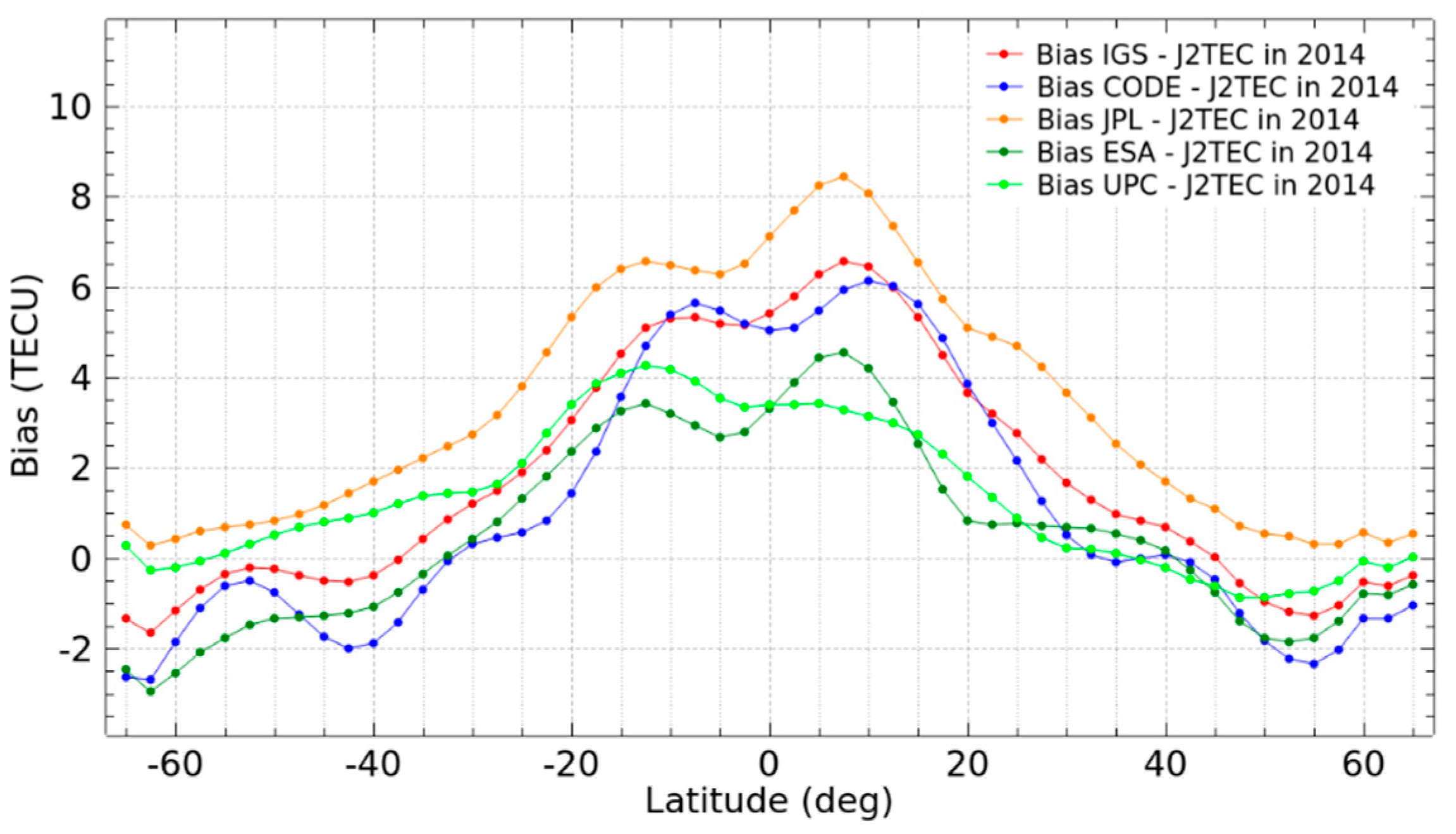
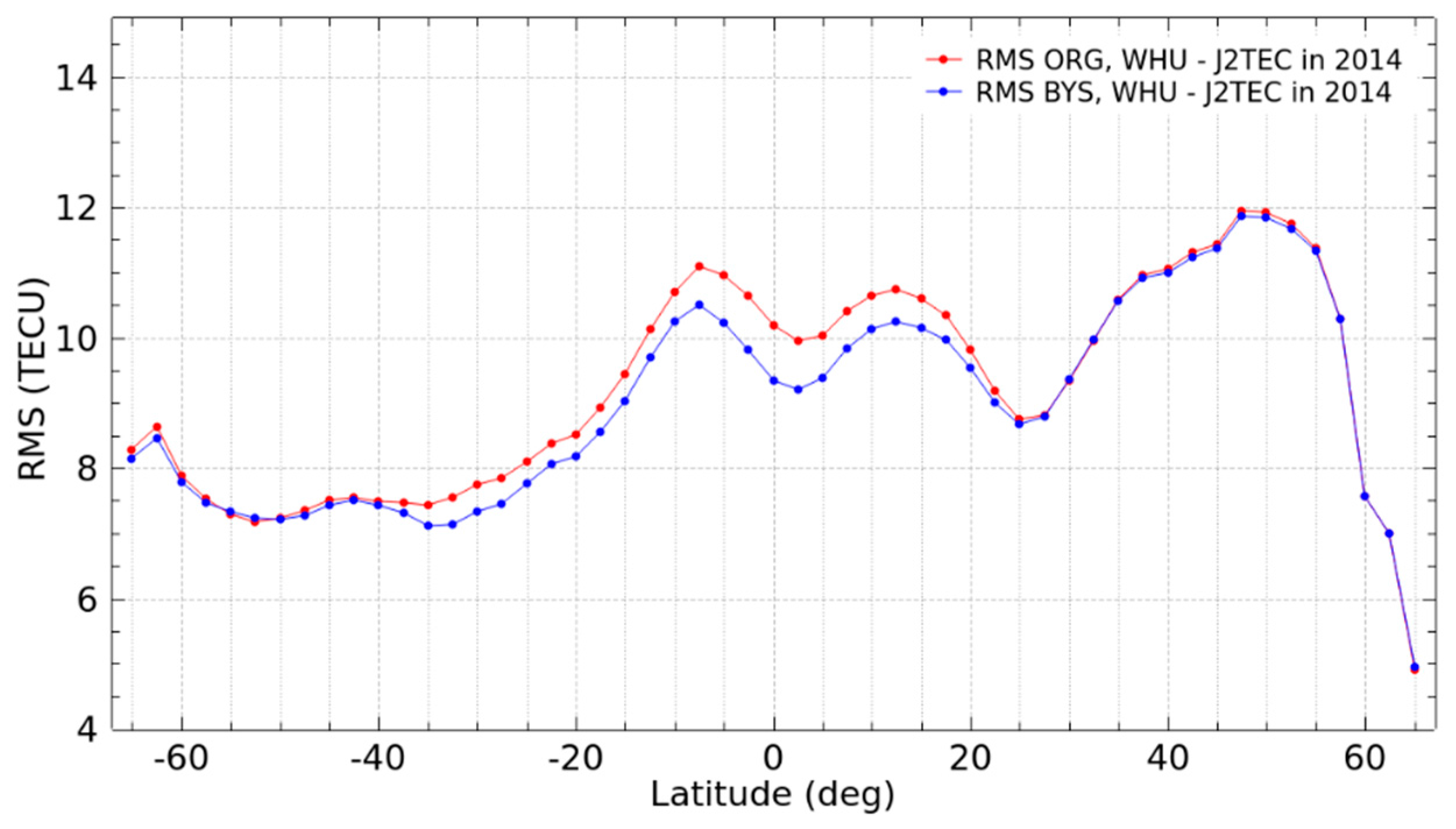
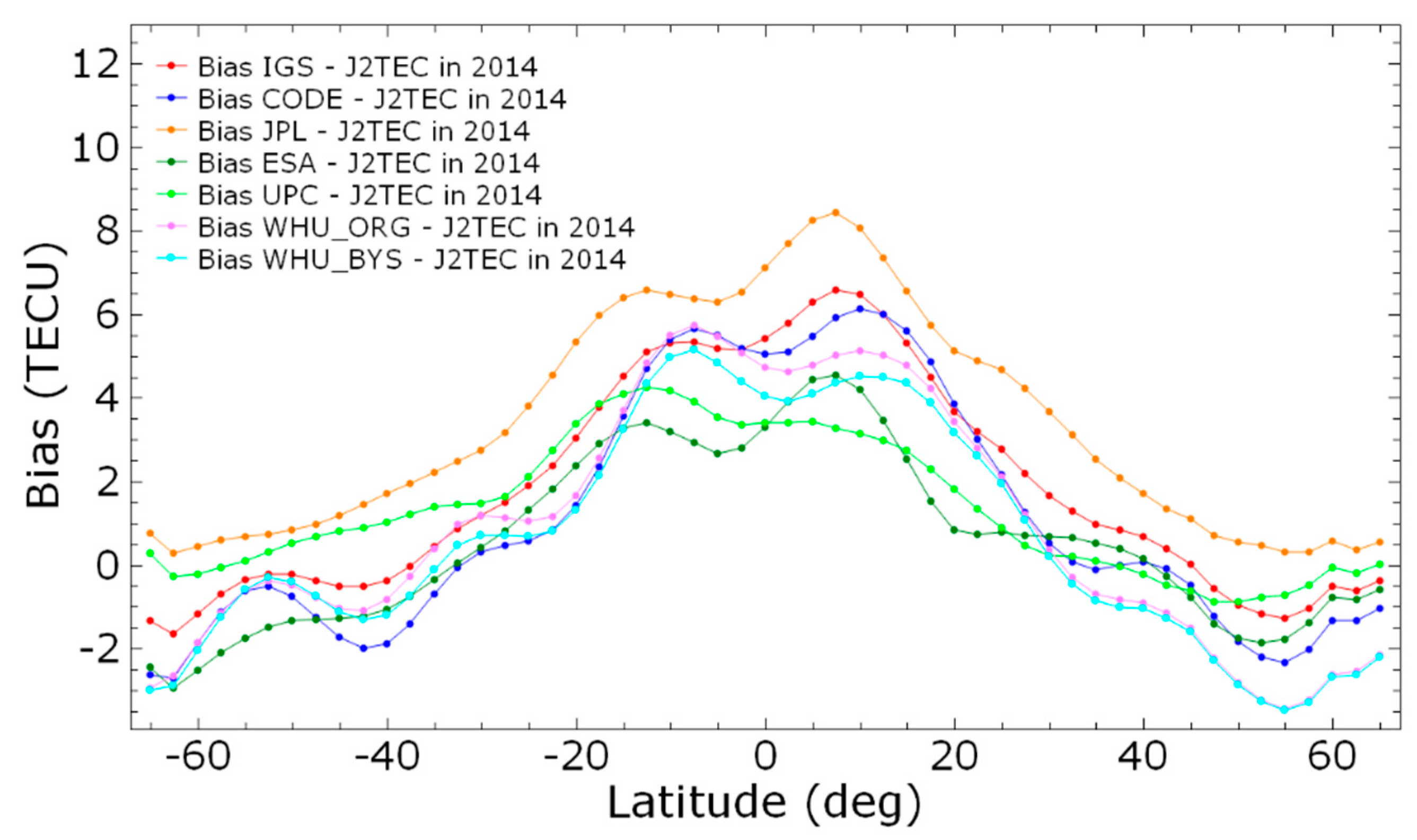
3.4. Validation with JASON Data
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A





References
- De Franceschi, G.; Zolesi, B. Regional ionospheric mapping and modelling over antarctica. Ann. Geophys. 1998, 41. [Google Scholar] [CrossRef]
- Feltens, J.; Schaer, S. Igs products for the ionosphere. In Proceedings of the IGS Analysis Centers Workshop, ESOC, Darmstadt, Germany, 9–11 February 1998; pp. 1–7. [Google Scholar]
- Jensen, A.; Ovstedal, O.; Grinde, G. Development of a regional ionosphere model for Norway. In Proceedings of the 2008 National Technical Meeting of the Institute of Navigation, San Diego, CA, USA, 28–30 January 2008; pp. 893–902. [Google Scholar]
- Komjathy, A. Global ionospheric total electron content mapping using the Global Positioning System. Ph.D. Thesis, University of New Brunswick, Fredericton, NB, Canada, 1997. [Google Scholar]
- Krypiak-Gregorczyk, A.; Wielgosz, P.; Borkowski, A. Ionosphere model for european region based on multi-gnss data and tps interpolation. Remote Sens. 2017, 9, 1221. [Google Scholar] [CrossRef]
- Lejeune, S.; Wautelet, G.; Warnant, R. Ionospheric effects on relative positioning within a dense gps network. GPS Solut. 2012, 16, 105–116. [Google Scholar] [CrossRef]
- Mautz, R.; Ping, J.; Heki, K.; Schaffrin, B.; Shum, C.; Potts, L. Efficient spatial and temporal representations of global ionosphere maps over japan using b-spline wavelets. J. Geodesy 2005, 78, 662–667. [Google Scholar] [CrossRef]
- Nykiel, G.; Zanimonskiy, Y.; Yampolski, Y.; Figurski, M. Efficient usage of dense gnss networks in central europe for the visualization and investigation of ionospheric tec variations. Sensors 2017, 17, 2298. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Shi, C.; Zhang, H. Project loon based augmentation for global ionospheric modeling over southern hemisphere. Sci. Rep. 2017, 7, 45976. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Shi, C.; Zhang, H.; Fan, L. Improvement of global ionospheric vtec maps using the iri 2012 ionospheric empirical model. J. Atmos. Sol. Terr. Phys. 2016, 146, 186–193. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Aragón-Ángel, À.; Defraigne, P.; Bergeot, N.; Prieto-Cerdeira, R.; García-Rigo, A. Distribution and mitigation of higher-order ionospheric effects on precise gnss processing. J. Geophys. Res. Solid Earth 2014, 119, 3823–3837. [Google Scholar] [CrossRef]
- Matteo, N.; Morton, Y. Higher-order ionospheric error at arecibo, millstone, and jicamarca. Radio Sci. 2010, 45. [Google Scholar] [CrossRef]
- Wang, H.; Wang, C.; Wang, J.; Dang, Y.; Bai, G.; Wang, Q. Global characteristics of the second-order ionospheric delay error using inversion of electron density profiles from cosmic occultation data. Sci. China Phys. Mech. Astron. 2014, 57, 365–374. [Google Scholar] [CrossRef]
- Sethia, G.; Rastogi, R.; Deshpande, M.; Chandra, H. Equatorial electrojet control of the low latitude ionosphere. J. Geomagn. Geoelectr. 1980, 32, 207–216. [Google Scholar] [CrossRef]
- Jakowski, N.; Béniguel, Y.; De Franceschi, G.; Pajares, M.H.; Jacobsen, K.S.; Stanislawska, I.; Tomasik, L.; Warnant, R.; Wautelet, G. Monitoring, tracking and forecasting ionospheric perturbations using gnss techniques. J. Space Weather Space Clim. 2012, 2, A22. [Google Scholar] [CrossRef]
- Sieradzki, R.; Paziewski, J. Mstids impact on gnss observations and its mitigation in rapid static positioning at medium baselines. Ann. Geophys. 2016, 58, A0661. [Google Scholar]
- Chen, J.; Zebker, H.A. Ionospheric artifacts in simultaneous l-band insar and gps observations. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1227–1239. [Google Scholar] [CrossRef]
- Jehle, M.; Frey, O.; Small, D.; Meier, E. Measurement of ionospheric tec in spaceborne sar data. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2460–2468. [Google Scholar] [CrossRef]
- Raucoules, D.; De Michele, M. Assessing ionospheric influence on l-band sar data: Implications on coseismic displacement measurements of the 2008 sichuan earthquake. IEEE Geosci. Remote Sens. Lett. 2010, 7, 286–290. [Google Scholar] [CrossRef]
- Camps, A.; Park, H.; Foti, G.; Gommenginger, C. Ionospheric effects in gnss-reflectometry from space. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 5851–5861. [Google Scholar] [CrossRef]
- Kumar, U.M.; Sasamal, S.; Swain, D.; Reddy, N.N.; Ramanjappa, T. Intercomparison of geophysical parameters from saral/altika and jason-2 altimeters. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 4863–4870. [Google Scholar] [CrossRef]
- Le Vine, D.M.; Abraham, S. The effect of the ionosphere on remote sensing of sea surface salinity from space: Absorption and emission at l band. IEEE Trans. Geosci. Remote Sens. 2002, 40, 771–782. [Google Scholar] [CrossRef]
- Kramer, H.J.; Cracknell, A.P. An overview of small satellites in remote sensing. Int. J. Remote Sens. 2008, 29, 4285–4337. [Google Scholar] [CrossRef]
- Mannucci, A.J.; Dickson, J.; Duncan, C.; Hurst, K. Gnss Geospace Constellation (GGC): A Cubesat Space Weather Mission Concept; Jet Propulsion Laboratory, California Institute of Technology: Pasadena, CA, USA, 2010. [Google Scholar]
- Marinan, A.D.; Cahoy, K.L.; Bishop, R.L.; Lui, S.S.; Bardeen, J.R.; Mulligan, T.; Blackwell, W.J.; Leslie, R.V.; Osaretin, I.A.; Shields, M. Assessment of radiometer calibration with gps radio occultation for the mirata cubesat mission. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 5703–5714. [Google Scholar] [CrossRef] [PubMed]
- Yu, K.; Rizos, C.; Burrage, D.; Dempster, A.G.; Zhang, K.; Markgraf, M. An overview of gnss remote sensing. EURASIP J. Adv. Signal Process. 2014, 2014, 134. [Google Scholar] [CrossRef] [Green Version]
- Dow, J.M.; Neilan, R.; Rizos, C. The international gnss service in a changing landscape of global navigation satellite systems. J. Geodesy 2009, 83, 191–198. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Juan, J.; Sanz, J.; Orus, R.; Garcia-Rigo, A.; Feltens, J.; Komjathy, A.; Schaer, S.; Krankowski, A. The igs vtec maps: A reliable source of ionospheric information since 1998. J. Geodesy 2009, 83, 263–275. [Google Scholar] [CrossRef]
- Roma-Dollase, D.; Hernández-Pajares, M.; Krankowski, A.; Kotulak, K.; Ghoddousi-Fard, R.; Yuan, Y.; Li, Z.; Zhang, H.; Shi, C.; Wang, C. Consistency of seven different gnss global ionospheric mapping techniques during one solar cycle. J. Geodesy 2017, 1–16. [Google Scholar] [CrossRef]
- Schaer, S. Mapping and Predicting the Earth’s Ionosphere Using the Global Positioning System. Ph.D. Dissertation, Astronomical Institute, University of Berne, Berne, Switzerland, 25 March 1999. [Google Scholar]
- Mannucci, A.; Wilson, B.; Yuan, D.; Ho, C.; Lindqwister, U.; Runge, T. Global mapping technique for gps-derived ionospheric total electron content measurements. Radio Sci. 1998, 33, 565–582. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Juan, J.; Sanz, J. New approaches in global ionospheric determination using ground gps data. J. Atmos. Sol. Terr. Phys. 1999, 61, 1237–1247. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Roma-Dollase, D.; Krankowski, A.; Ghoddousi-Fard, R.; Yuan, Y.; Li, Z.; Zhang, H.; Shi, C.; Feltens, J.; Komjathy, A.; et al. Comparing Performances of Seven Different Global VTEC Ionospheric Models in the IGS Context. In Proceedings of the IGS Workshop, Sydney, Australia, 8–12 February 2016. [Google Scholar]
- Orús, R.; Hernández-Pajares, M.; Juan, J.; Sanz, J. Improvement of global ionospheric vtec maps by using kriging interpolation technique. J. Atmos. Sol. Terr. Phys. 2005, 67, 1598–1609. [Google Scholar] [CrossRef]
- Zhang, H.; Xu, P.; Han, W.; Ge, M.; Shi, C. Eliminating negative vtec in global ionosphere maps using inequality-constrained least squares. Adv. Space Res. 2013, 51, 988–1000. [Google Scholar] [CrossRef]
- Hernandez-Pajares, M.; Juan, J.; Sanz, J.; Bilitza, D. Combining gps measurements and iri model values for space weather specification. Adv. Space Res. 2002, 29, 949–958. [Google Scholar] [CrossRef]
- Mandrake, L.; Wilson, B.; Wang, C.; Hajj, G.; Mannucci, A.; Pi, X. A performance evaluation of the operational jet propulsion laboratory/university of southern california global assimilation ionospheric model (jpl/usc gaim). J. Geophys. Res. Space Phys. 2005, 110. [Google Scholar] [CrossRef]
- Sakai, T.; Matsunaga, K.; Hoshinoo, K.; Ito, K.; Walter, T. Mitigating Ionospheric Threat Using a Dense Monitoring Network. In Proceedings of the 20th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2007), Fort Worth, TX, USA, 25–28 September 2007; pp. 927–938. [Google Scholar]
- Dach, R.; Hugentobler, U.; Fridez, P.; Meindl, M. Bernese GPS Software Version 5.0; Astronomical Institute, University of Bern: Bern, Switzerland, 2007; Volume 640, p. 114. [Google Scholar]
- Koch, K.-R. Bayes’ theorem. In Bayesian Inference with Geodetic Applications; Springer: Berlin/Heidelberg, Germany, 1990; pp. 4–8. [Google Scholar]
- Berger, J.O.; Moreno, E.; Pericchi, L.R.; Bayarri, M.J.; Bernardo, J.M.; Cano, J.A.; De la Horra, J.; Martín, J.; Ríos-Insúa, D.; Betrò, B. An overview of robust bayesian analysis. Test 1994, 3, 5–124. [Google Scholar] [CrossRef]
- Yuanxi, Y. Robust bayesian estimation. Bulletin Géodésique 1991, 65, 145–150. [Google Scholar] [CrossRef]
- Schaer, S.; Gurtner, W.; Feltens, J. IONEX: The IONosphere map exchange format version 1. In Proceedings of the IGS AC Workshop, Darmstadt, Germany, 9–11 February 1998; pp. 233–247. [Google Scholar]
- García-Rigo, A.; Monte, E.; Hernández-Pajares, M.; Juan, J.M.; Sanz, J.; Aragón-Angel, A.; Salazar, D. Global prediction of the vertical total electron content of the ionosphere based on gps data. Radio Sci. 2011, 46, 1–3. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IGS | CODE | JPL | ESA | UPC | ||
|---|---|---|---|---|---|---|
| Bias | ORG | −0.80 | −0.050 | −2.28 | 0.16 | −0.75 |
| BYS | −1.07 | −0.33 | −2.55 | −0.12 | −1.03 | |
| RMS | ORG | 4.48 | 4.25 | 5.55 | 5.80 | 5.64 |
| BYS | 4.20 | 3.97 | 5.45 | 5.40 | 5.31 | |
| IGS | CODE | JPL | ESA | UPC | |
|---|---|---|---|---|---|
| Prob. | 89.86% | 89.32% | 70.96% | 97.81% | 96.16% |
| Min | −0.42 | −0.48 | −0.52 | −0.20 | −0.27 |
| Max | 1.46 | 1.39 | 0.77 | 1.43 | 1.19 |
| Mean | 0.28 | 0.28 | 0.10 | 0.39 | 0.33 |
| IGS | CODE | JPL | ESA | UPC | ||
|---|---|---|---|---|---|---|
| Bias | ORG | 0.030 | 0.031 | 0.0056 | 0.040 | 0.00015 |
| BYS | 0.029 | 0.030 | 0.0063 | 0.040 | 0.0014 | |
| RMS | ORG | 0.15 | 0.15 | 0.14 | 0.21 | 0.20 |
| BYS | 0.14 | 0.14 | 0.13 | 0.20 | 0.19 | |
| IGS | CODE | JPL | ESA | UPC | ||
|---|---|---|---|---|---|---|
| Bias | ORG | −0.31 | −0.19 | −0.32 | −0.32 | −0.75 |
| BYS | −0.37 | −0.25 | −0.38 | −0.41 | −0.80 | |
| RMS | ORG | 0.84 | 0.79 | 0.83 | 1.06 | 1.20 |
| BYS | 0.85 | 0.81 | 0.86 | 1.07 | 1.30 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Shi, C.; Fan, L.; Zhang, H. Improved Modeling of Global Ionospheric Total Electron Content Using Prior Information. Remote Sens. 2018, 10, 63. https://doi.org/10.3390/rs10010063
Wang C, Shi C, Fan L, Zhang H. Improved Modeling of Global Ionospheric Total Electron Content Using Prior Information. Remote Sensing. 2018; 10(1):63. https://doi.org/10.3390/rs10010063
Chicago/Turabian StyleWang, Cheng, Chuang Shi, Lei Fan, and Hongping Zhang. 2018. "Improved Modeling of Global Ionospheric Total Electron Content Using Prior Information" Remote Sensing 10, no. 1: 63. https://doi.org/10.3390/rs10010063
APA StyleWang, C., Shi, C., Fan, L., & Zhang, H. (2018). Improved Modeling of Global Ionospheric Total Electron Content Using Prior Information. Remote Sensing, 10(1), 63. https://doi.org/10.3390/rs10010063