Characterization of GNSS Signals Tracked by the iGMAS Network Considering Recent BDS-3 Satellites




Abstract
:1. Introduction
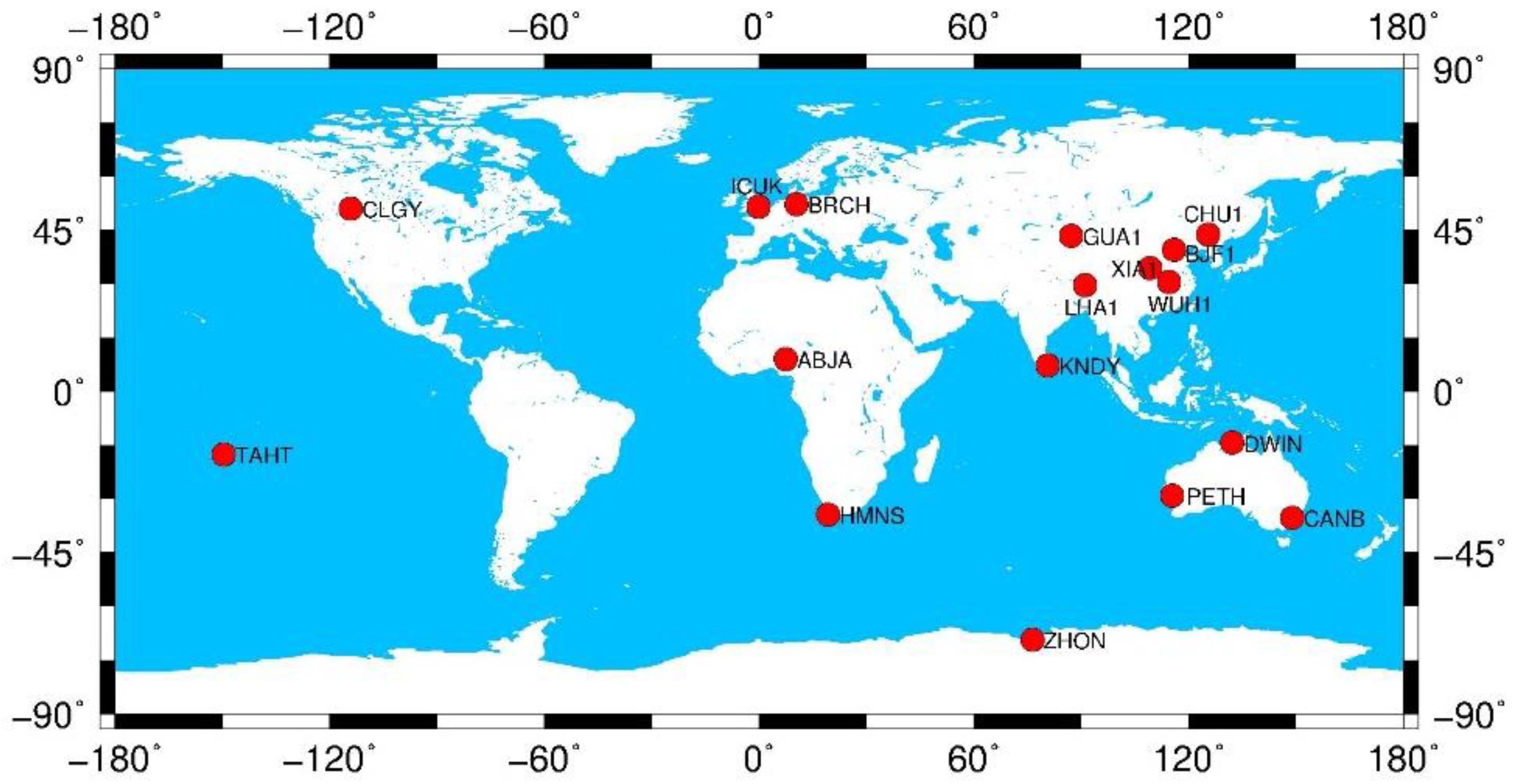
2. Datasets
3. Methodology and Results
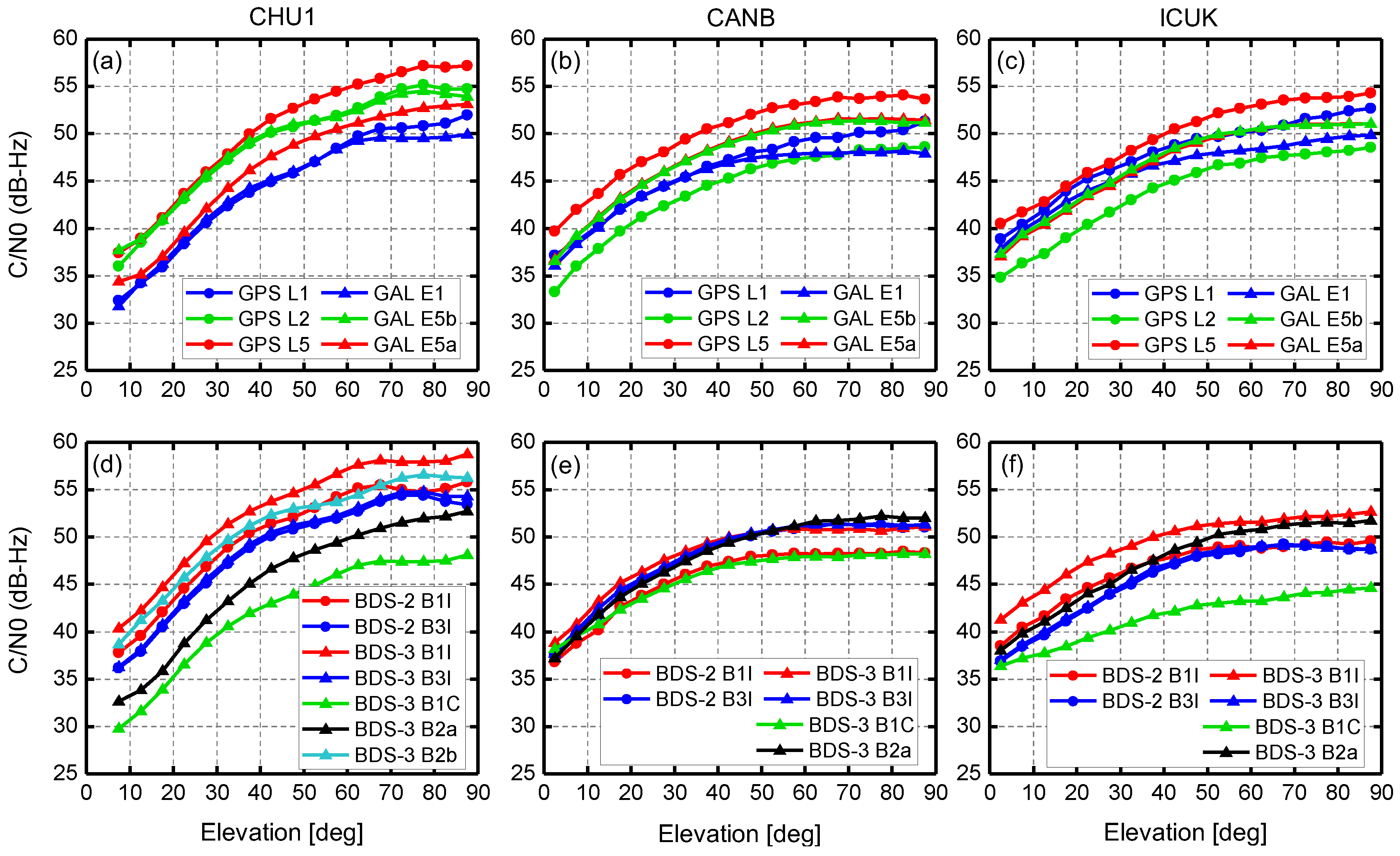
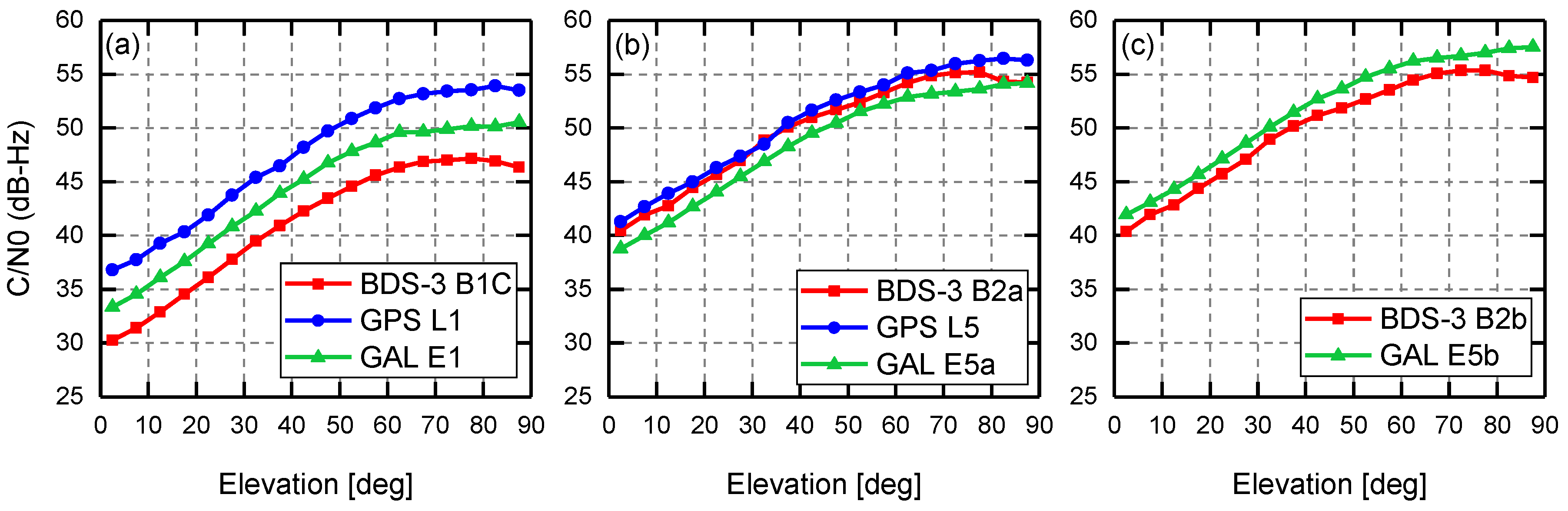
3.1. Carrier-To-Noise Density Ratio
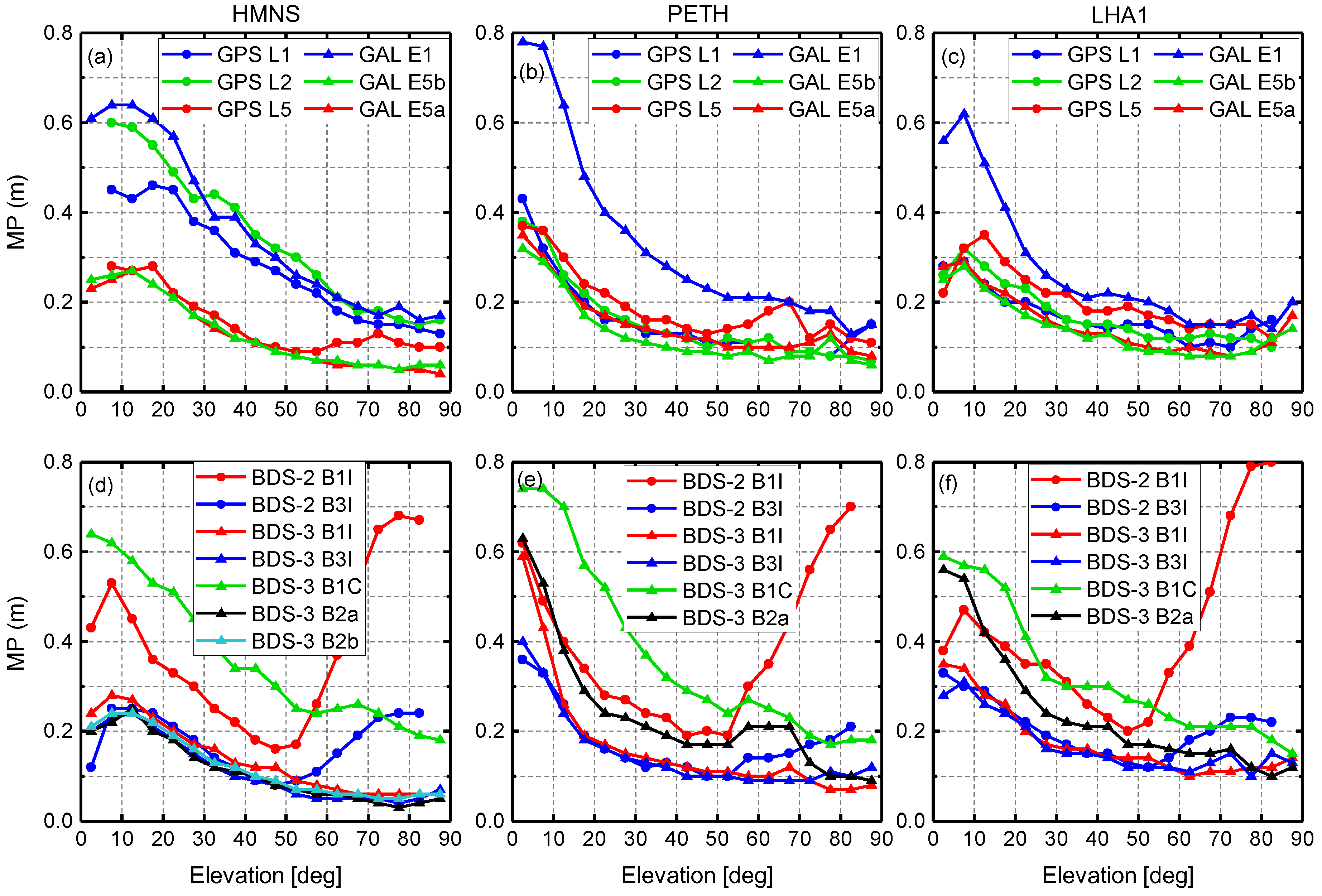
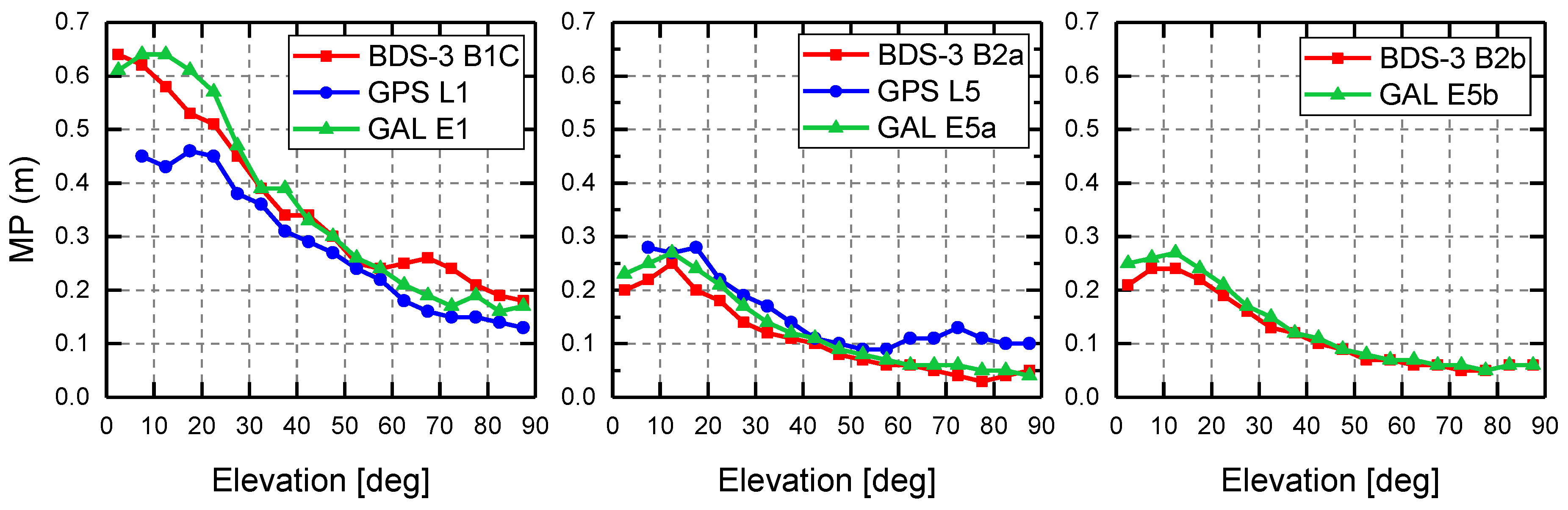
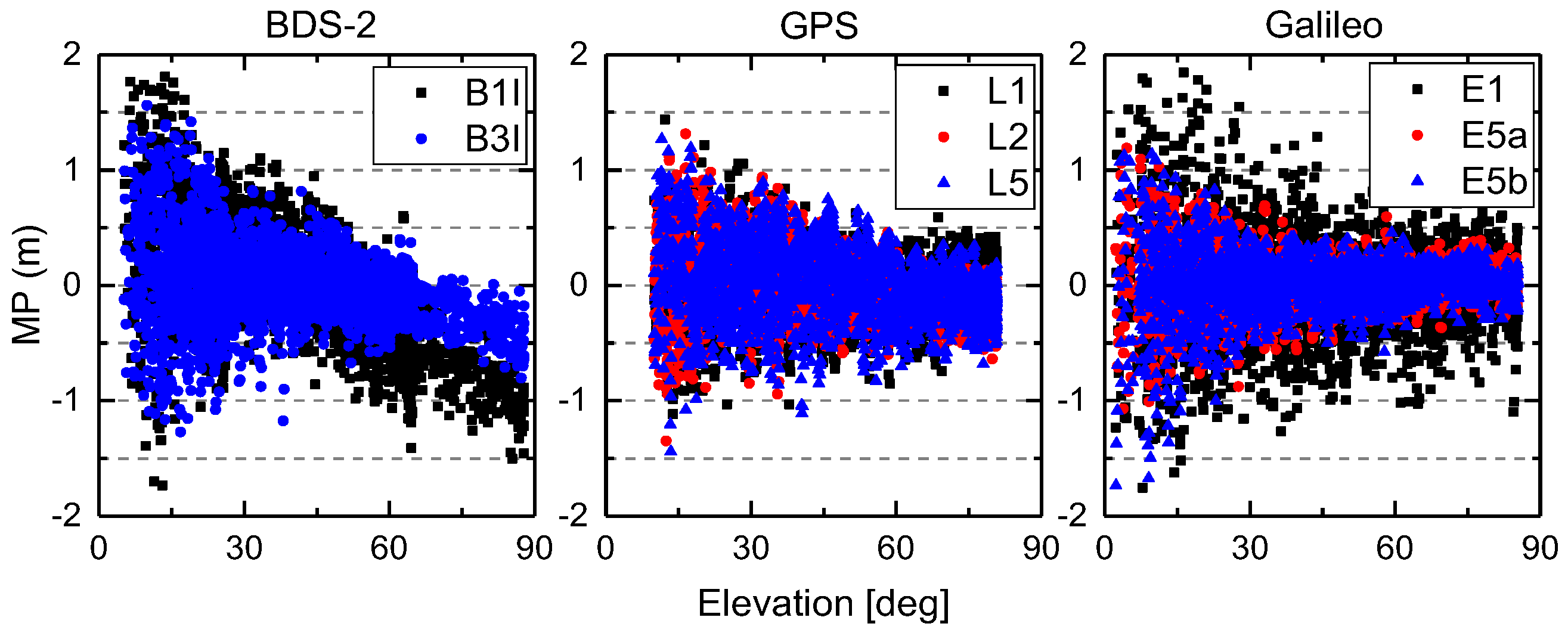
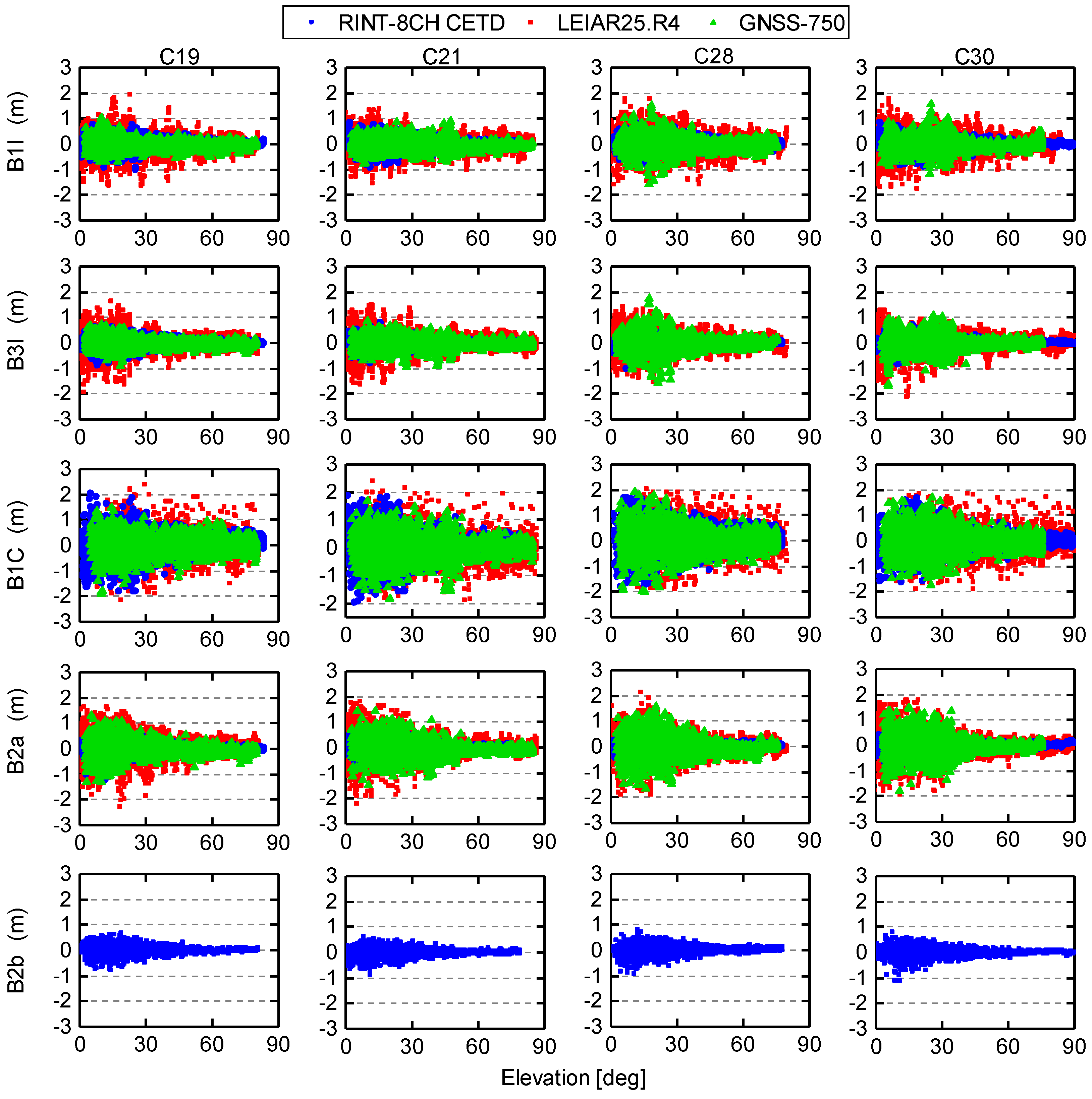
3.2. Pseudo-range Noise and Multipath
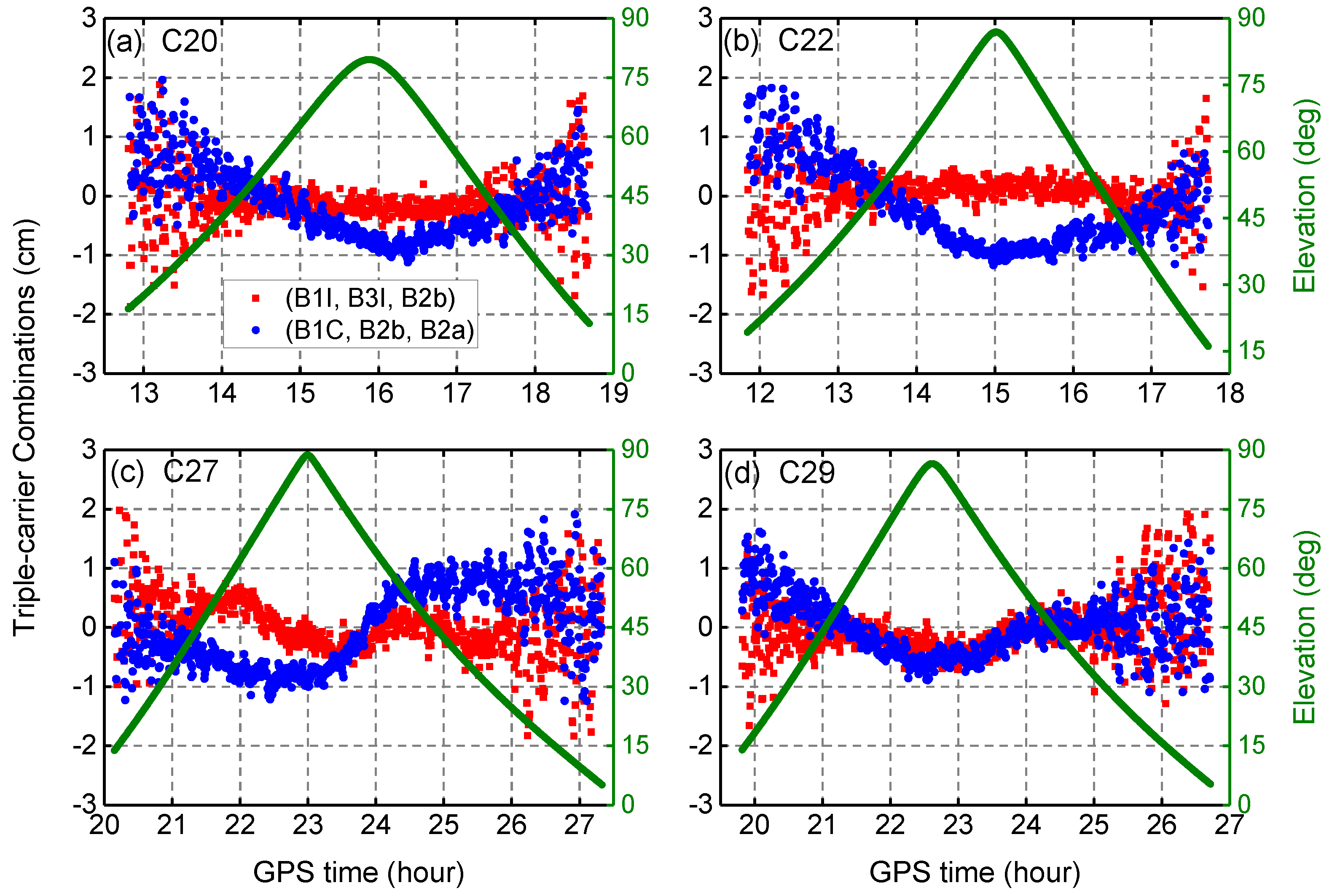
3.3. Satellite-Induced Code Bias
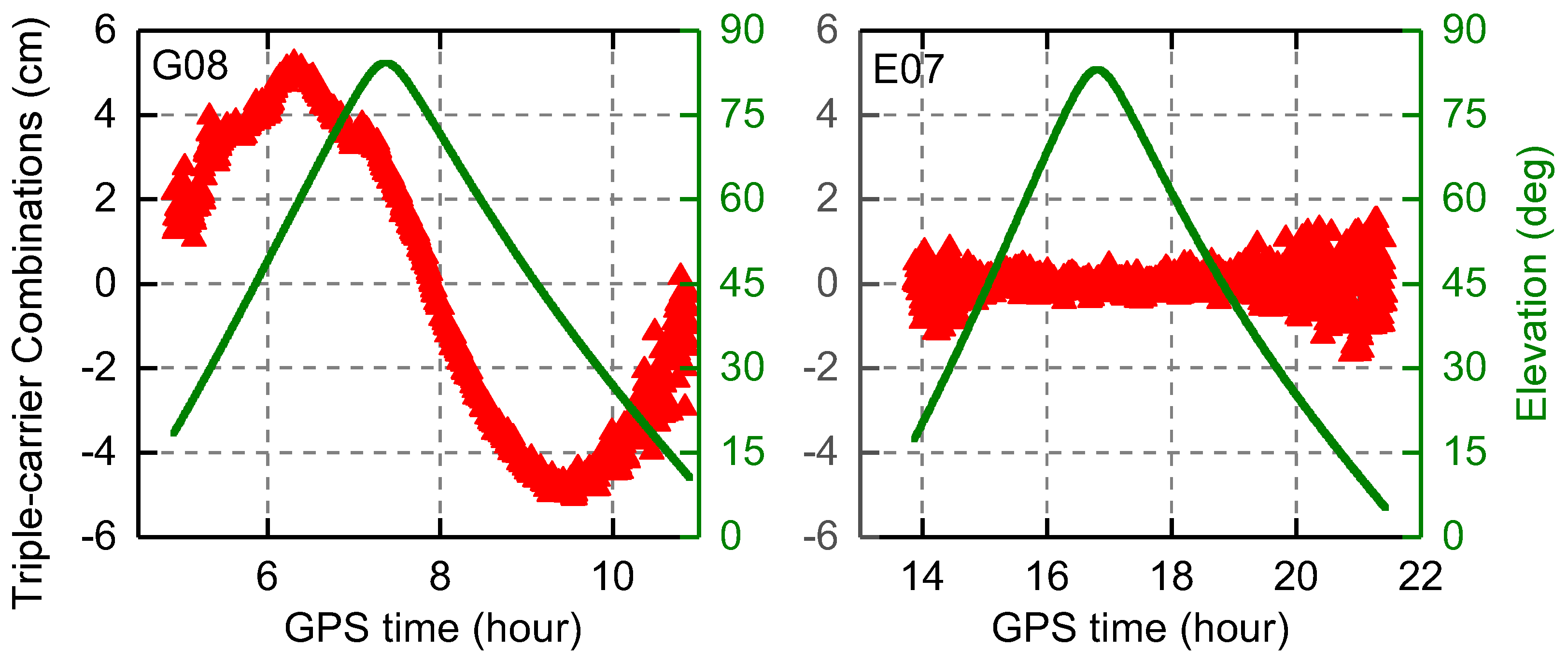
3.4. Inter-Frequency Clock Bias
4. Discussion
5. Conclusions
- For the old B1I and B3I signals, BDS-3 shows a better performance compared with BDS-2. For the signals with overlapping frequencies of BDS-3, GPS, and Galileo, the observational quality of BDS-3 B2a/B2b signals is comparable to that of corresponding GPS and Galileo signals, while the BDS-3 B1C signal exhibits the lowest C/N0 values.
- Satellite-induced code biases are not obvious for all the available signals of BDS-3 satellites and may be negligible for high-precision applications.
- Inter-frequency clock bias still exists in BDS-3 signals, but the variations are small and generally confined to an amplitude of about 1 cm.
- The recently deployed BDS-3 satellites show similar signal tracking characteristics to the previous BDS-3e satellites.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Jiao, W.; Ding, Q.; Li, J.; Lu, X.; Feng, L.; Ma, J.; Chen, G. Monitoring and Assessment of GNSS Open Services. J. Navig. 2011, 64, S19–S29. [Google Scholar] [CrossRef]
- Cai, H.; Chen, G.; Jiao, W.; Chen, K.; Xu, T.; Wang, H. An Initial Analysis and Assessment on Final Products of iGMAS. In Proceedings of the China satellite navigation conference (CSNC) 2016, Changsha, China, 18–20 May 2016; pp. 515–527. [Google Scholar]
- Yang, Y.; Li, J.; Xu, J.; Tang, J.; Guo, H.; He, H. Contribution of the Compass satellite navigation system to global PNT users. Chin. Sci. Bull. 2011, 56, 2813–2819. [Google Scholar] [CrossRef] [Green Version]
- SCIO. China’s BeiDou Navigation Satellite System by the State Council Information Office of the People’s Republic of China (SCIO). 2016. Available online: http://www.beidou.gov.cn/xt/gfxz/201712/P020171221333863515306.pdf (accessed on 10 June 2017).
- Zhang, X.; Wu, M.; Liu, W.; Li, X.; Yu, S.; Lu, C.; Wickert, J. Initial assessment of the COMPASS/BeiDou-3: New-generation navigation signals. J. Geod. 2017, 91, 1225–1240. [Google Scholar] [CrossRef]
- Xie, X.; Geng, T.; Zhao, Q.; Liu, J.; Wang, B. Performance of BDS-3: Measurement Quality Analysis, Precise Orbit and Clock Determination. Sensors 2017, 17, 1233. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Zhou, S.; Hu, X.; Liu, L.; Shuai, T.; Xie, Y.; Tang, C.; Pan, J.; Zhu, L.; Chang, Z. Performance of the BDS3 experimental satellite passive hydrogen maser. GPS Solut. 2018, 22. [Google Scholar] [CrossRef]
- Xu, X.; Li, M.; Li, W.; Liu, J. Performance Analysis of Beidou-2/Beidou-3e Combined Solution with Emphasis on Precise Orbit Determination and Precise Point Positioning. Sensors 2018, 18, 135. [Google Scholar] [CrossRef] [PubMed]
- Tan, B.; Yuan, Y.; Wen, M.; Ning, Y.; Liu, X. Initial Results of the Precise Orbit Determination for the New-Generation BeiDou Satellites (BeiDou-3) Based on the iGMAS Network. ISPRS Int. J. Geo-Inf. 2016, 5, 196. [Google Scholar] [CrossRef]
- Zhang, X.; Li, X.; Lu, C.; Wu, M.; Pan, L. A comprehensive analysis of satellite-induced code bias for BDS-3 satellites and signals. Adv. Space Res. 2017. [Google Scholar] [CrossRef]
- Li, X.; Xie, W.; Huang, J.; Ma, T.; Zhang, X.; Yuan, Y. Estimation and analysis of differential code biases for BDS3/BDS2 using iGMAS and MGEX observations. J. Geod. 2018. [Google Scholar] [CrossRef]
- Xiao, W.; Liu, W.; Sun, G. Modernization milestone: BeiDou M2-S initial signal analysis. GPS Solut. 2015, 20, 125–133. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, Y.; Li, J.; Yang, C. Progress and performance evaluation of BeiDou global navigation satellite system: Data analysis based on BDS-3 demonstration system. Sci. China Earth Sci. 2018, 61, 614–624. [Google Scholar] [CrossRef] [Green Version]
- Montenbruck, O.; Hauschild, A.; Hessels, U. Characterization of GPS/GIOVE sensor stations in the CONGO network. GPS Solut. 2010, 15, 193–205. [Google Scholar] [CrossRef]
- Kee, C. Calibration of multipath errors on GPS pseudorange measurements. In Proceedings of the ION GPS-1994, Salt Lake City, UT, USA, 20–23 September 1994; pp. 353–362. [Google Scholar]
- Estey, L.H.; Meertens, C.M. TEQC: The Multi-Purpose Toolkit for GPS/GLONASS Data. GPS Solut. 1999, 3, 42–49. [Google Scholar] [CrossRef]
- Montenbruck, O.; Hauschild, A.; Steigenberger, P.; Hugentobler, U.; Teunissen, P.; Nakamura, S. Initial assessment of the COMPASS/BeiDou-2 regional navigation satellite system. GPS Solut. 2012, 17, 211–222. [Google Scholar] [CrossRef]
- Shi, C.; Zhao, Q.; Hu, Z.; Liu, J. Precise relative positioning using real tracking data from COMPASS GEO and IGSO satellites. GPS Solut. 2012, 17, 103–119. [Google Scholar] [CrossRef]
- Pan, L.; Guo, F.; Ma, F. An Improved BDS Satellite-Induced Code Bias Correction Model Considering the Consistency of Multipath Combinations. Remote Sens. 2018, 10, 1189. [Google Scholar] [CrossRef]
- Wanninger, L.; Beer, S. BeiDou satellite-induced code pseudorange variations: Diagnosis and therapy. GPS Solut. 2014, 19, 639–648. [Google Scholar] [CrossRef]
- Lou, Y.; Gong, X.; Gu, S.; Zheng, F.; Feng, Y. Assessment of code bias variations of BDS triple-frequency signals and their impacts on ambiguity resolution for long baselines. GPS Solut. 2016, 21, 177–186. [Google Scholar] [CrossRef]
- Zhang, X.; He, X.; Liu, W. Characteristics of systematic errors in the BDS Hatch–Melbourne–Wübbena combination and its influence on wide-lane ambiguity resolution. GPS Solut. 2016, 21, 265–277. [Google Scholar] [CrossRef]
- Geng, T.; Xie, X.; Zhao, Q.; Liu, X.; Liu, J. Improving BDS integer ambiguity resolution using satellite-induced code bias correction for precise orbit determination. GPS Solut. 2017, 21, 1191–1201. [Google Scholar] [CrossRef] [Green Version]
- Montenbruck, O.; Hugentobler, U.; Dach, R.; Steigenberger, P.; Hauschild, A. Apparent clock variations of the Block IIF-1 (SVN62) GPS satellite. GPS Solut. 2011, 16, 303–313. [Google Scholar] [CrossRef]
- Li, H.; Zhou, X.; Wu, B. Fast estimation and analysis of the inter-frequency clock bias for Block IIF satellites. GPS Solut. 2013, 17, 347–355. [Google Scholar] [CrossRef]
- Zhao, Q.; Wang, G.; Liu, Z.; Hu, Z.; Dai, Z.; Liu, J. Analysis of BeiDou Satellite Measurements with Code Multipath and Geometry-Free Ionosphere-Free Combinations. Sensors 2016, 16, 123. [Google Scholar] [CrossRef] [PubMed]
- Pan, L.; Li, X.; Zhang, X.; Li, X.; Lu, C.; Zhao, Q.; Liu, J. Considering Inter-Frequency Clock Bias for BDS Triple-Frequency Precise Point Positioning. Remote Sens. 2017, 9, 734. [Google Scholar] [CrossRef]
- Hauschild, A.; Steigenberger, P.; Rodriguez-Solano, C. Signal, orbit and attitude analysis of Japan’s first QZSS satellite Michibiki. GPS Solut. 2011, 16, 127–133. [Google Scholar] [CrossRef]
- Pan, L.; Zhang, X.; Li, X.; Liu, J.; Li, X. Characteristics of inter-frequency clock bias for Block IIF satellites and its effect on triple-frequency GPS precise point positioning. GPS Solut. 2017, 21, 811–822. [Google Scholar] [CrossRef]
- Guo, J.; Geng, J. GPS satellite clock determination in case of inter-frequency clock biases for triple-frequency precise point positioning. J. Geod. 2017, 92, 1133–1142. [Google Scholar] [CrossRef]
- Li, H.; Li, B.; Xiao, G.; Wang, J.; Xu, T. Improved method for estimating the inter-frequency satellite clock bias of triple-frequency GPS. GPS Solut. 2015, 20, 751–760. [Google Scholar] [CrossRef]
- Pan, L.; Zhang, X.; Li, X.; Liu, J.; Guo, F.; Yuan, Y. GPS inter-frequency clock bias modeling and prediction for real-time precise point positioning. GPS Solut. 2018, 22, 76. [Google Scholar] [CrossRef]
- Zhou, R.; Hu, Z.; Zhao, Q.; Li, P.; Wang, W.; He, C.; Cai, C.; Pan, Z. Elevation-dependent pseudorange variation characteristics analysis for the new-generation BeiDou satellite navigation system. GPS Solut. 2018, 22. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | SVN | Int. Sat. ID | Manuf. | PRN | Notes |
|---|---|---|---|---|---|
| BDS-3 MEO-1 | C201 | 2017-069A | CAST | C19 | Slot B-7; launched 5 Nov. 2017 PRN C19 used until 12 Jun. 2018 |
| BDS-3 MEO-2 | C202 | 2017-069B | CAST | C20 | Slot B-8; launched 5 Nov. 2017 |
| BDS-3 MEO-3 | C206 | 2018-018B | CAST | C21 | Slot B-5; launched 12 Feb. 2018 |
| BDS-3 MEO-4 | C205 | 2018-018A | CAST | C22 | Slot B-6; launched 12 Feb. 2018 |
| BDS-3 MEO-7 | C203 | 2018-003A | CAS | C27 | Slot A-4; launched 11 Jan. 2018 |
| BDS-3 MEO-8 | C204 | 2018-003B | CAS | C28 | Slot A-5; launched 11 Jan. 2018 |
| BDS-3 MEO-9 | C207 | 2018-029A | CAS | C29 | Slot A-2; launched 29 Mar. 2018 |
| BDS-3 MEO-10 | C208 | 2018-029B | CAS | C30 | Slot A-3; launched 29 Mar. 2018 |
| System | Signal | Frequency (MHz) | Wavelength (cm) | Chip Rate (Mcps) |
|---|---|---|---|---|
| BDS-2 | B1I | 1561.098 | 19.20 | 2.046 |
| B2I | 1207.140 | 24.83 | 2.046 | |
| B3I | 1268.520 | 23.63 | 10.23 | |
| BDS-3 | B1I | 1561.098 | 19.20 | 2.046 |
| B1C | 1575.420 | 19.03 | 1.023 | |
| B2a | 1176.450 | 25.48 | 10.23 | |
| B2b | 1207.140 | 24.83 | 10.23 | |
| B3I | 1268.520 | 23.63 | 10.23 |
| Abb. | Location | Receiver | Antenna | Tracked BDS-3 Signals |
|---|---|---|---|---|
| ABJA | Abuja | GNSS_GGR | RINT-8CH CETD | B1I, B3I, B1C, B2a, B2b |
| CHU1 | Changchun | GNSS_GGR | RINT-8CH CETD | B1I, B3I, B1C, B2a, B2b |
| GUA1 | Urumqi | GNSS_GGR | RINT-8CH CETD | B1I, B3I, B1C, B2a, B2b |
| HMNS | Hermanus | GNSS_GGR | RINT-8CH CETD | B1I, B3I, B1C, B2a, B2b |
| THAT | Tahiti | GNSS_GGR | RINT-8CH CETD | B1I, B3I, B1C, B2a, B2b |
| XIA1 | Xi’an | GNSS_GGR | RINT-8CH CETD | B1I, B3I, B1C, B2a, B2b |
| CANB | Canberra | CETC-54-GMR-4011 | GNSS-750 | B1I, B3I, B1C, B2a |
| DWIN | Darwin | CETC-54-GMR-4011 | GNSS-750 | B1I, B3I, B1C, B2a |
| PETH | Perth | CETC-54-GMR-4011 | GNSS-750 | B1I, B3I, B1C, B2a |
| ZHON | Antarctica | CETC-54 GMR-4011 | GNSS-750 | B1I, B3I, B1C, B2a |
| BJF1 | Beijing | CETC-54-GMR-4016 | LEIAR25.R4 LEIT | B1I, B3I, B1C, B2a |
| CLGY | Calgary | CETC-54-GMR-4016 | LEIAR25.R4 LEIT | B1I, B3I, B1C, B2a |
| WUH1 | Wuhan | CETC-54-GMR-4016 | LEIAR25.R4 LEIT | B1I, B3I, B1C, B2a |
| BRCH | Braunschweig | CETC-54-GMR-4016 | NOV750.R4 NOVS | B1I, B3I, B1C, B2a |
| LHA1 | Lhasa | CETC-54-GMR-4016 | NOV750.R4 NOVS | B1I, B3I, B1C, B2a |
| ICUK | London | CETC-54-GMR-4016 | NOV750.R4 NOVS | B1I, B3I, B1C, B2a |
| KNDY | Kandy | CETC-54-GMR-4016 | GNSS-750 | B1I, B3I, B1C, B2a |
| GNSS System | Signals | Combination |
|---|---|---|
| GPS | (L1, L2, L5) | +0.285 L1 − 1.546 L2 + 1.261 L5 |
| Galileo | (E1, E5b, E5a) | +0.161 E1 − 1.422 E5b + 1.261 E5a |
| BDS-3 | (B1I, B3I, B2b) | +0.457 B1I − 1.944 B3I + 1.487 B2b |
| (B1C, B2b, B2a) | +0.161 B1C − 1.422 B2b + 1.261 B2a |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, X.; Fang, R.; Geng, T.; Wang, G.; Zhao, Q.; Liu, J. Characterization of GNSS Signals Tracked by the iGMAS Network Considering Recent BDS-3 Satellites. Remote Sens. 2018, 10, 1736. https://doi.org/10.3390/rs10111736
Xie X, Fang R, Geng T, Wang G, Zhao Q, Liu J. Characterization of GNSS Signals Tracked by the iGMAS Network Considering Recent BDS-3 Satellites. Remote Sensing. 2018; 10(11):1736. https://doi.org/10.3390/rs10111736
Chicago/Turabian StyleXie, Xin, Rongxin Fang, Tao Geng, Guangxing Wang, Qile Zhao, and Jingnan Liu. 2018. "Characterization of GNSS Signals Tracked by the iGMAS Network Considering Recent BDS-3 Satellites" Remote Sensing 10, no. 11: 1736. https://doi.org/10.3390/rs10111736
APA StyleXie, X., Fang, R., Geng, T., Wang, G., Zhao, Q., & Liu, J. (2018). Characterization of GNSS Signals Tracked by the iGMAS Network Considering Recent BDS-3 Satellites. Remote Sensing, 10(11), 1736. https://doi.org/10.3390/rs10111736