Absolute Calibration of the European Sentinel-3A Surface Topography Mission over the Permanent Facility for Altimetry Calibration in west Crete, Greece



 ,
,  and
and
Abstract
:1. Introduction
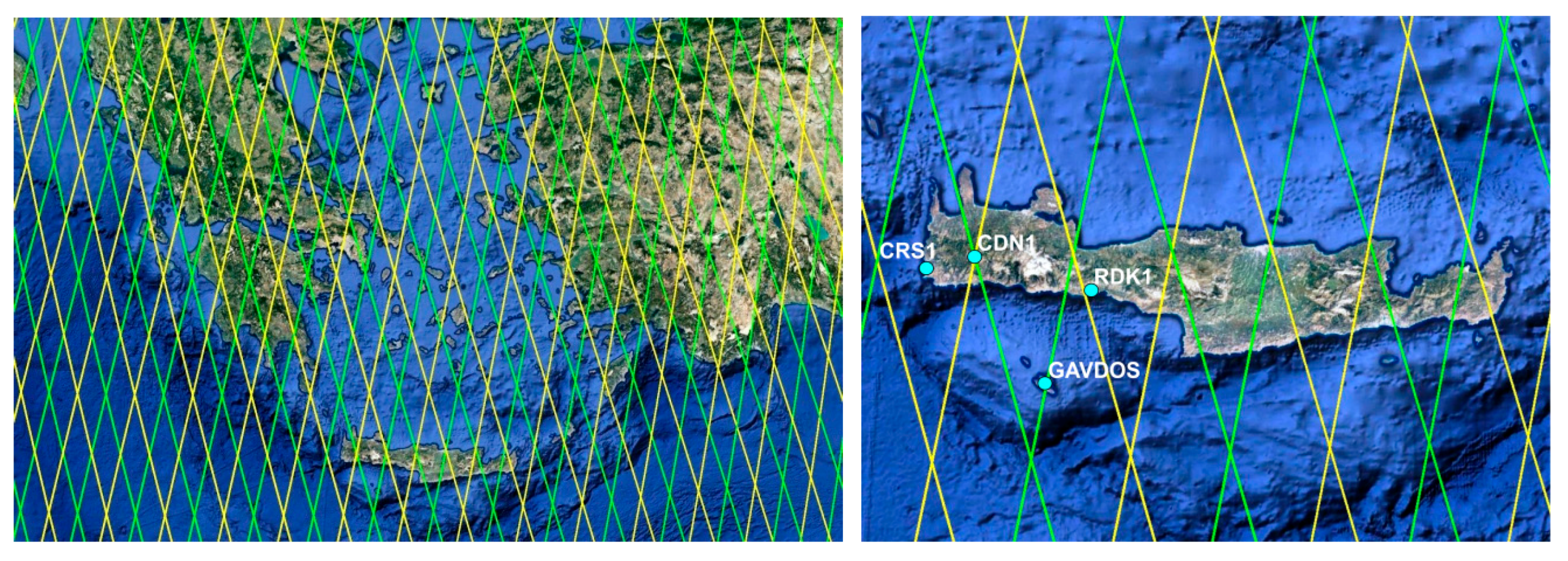
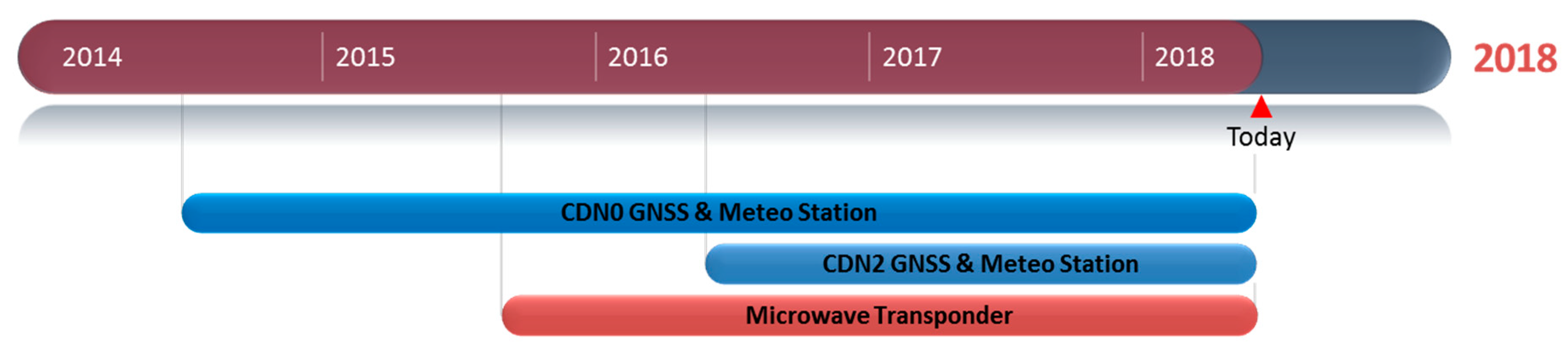
2. PFAC Infrastructure & Instrumentation
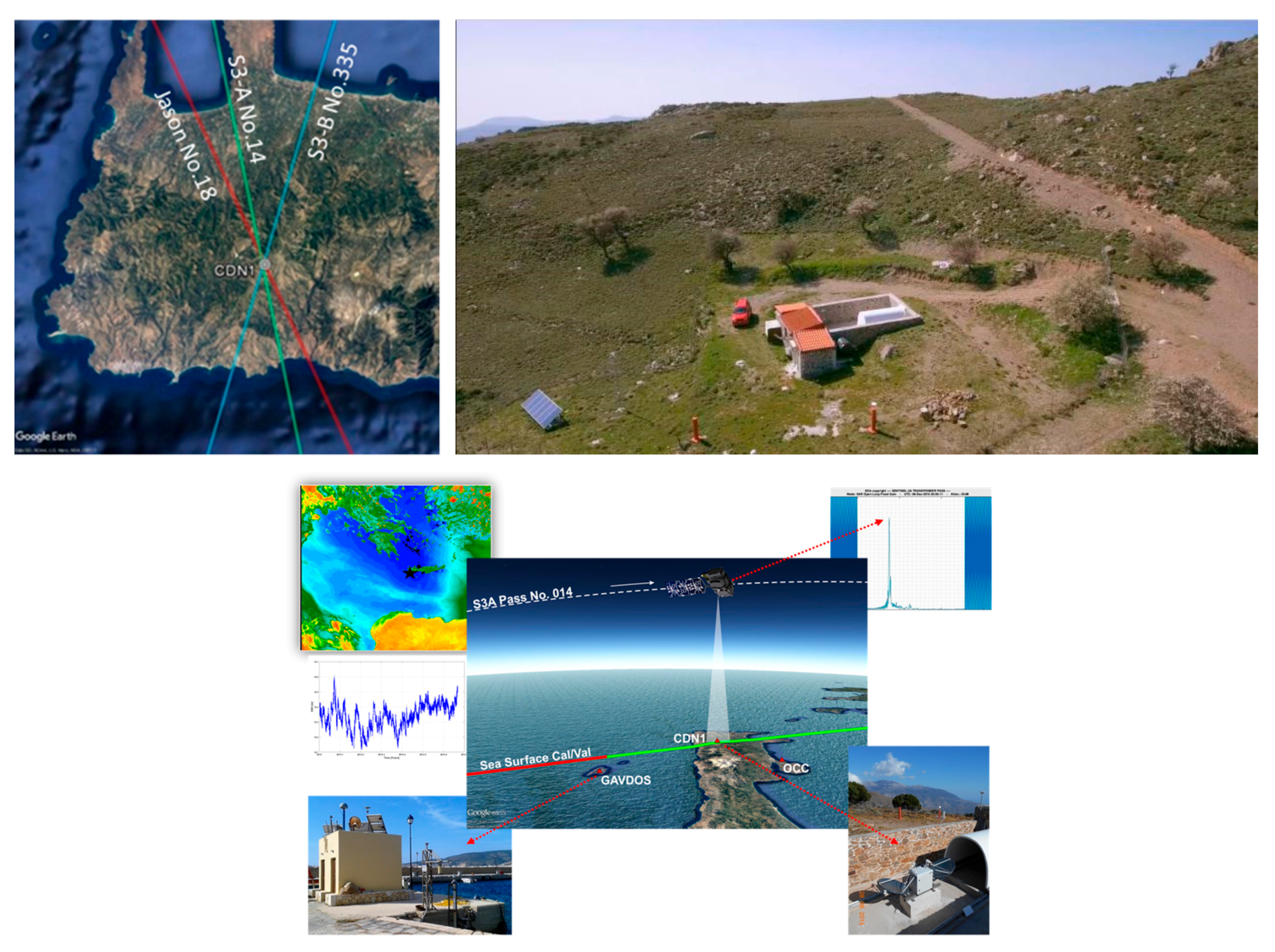
2.1. CDN1 Transponder Cal/Val Site
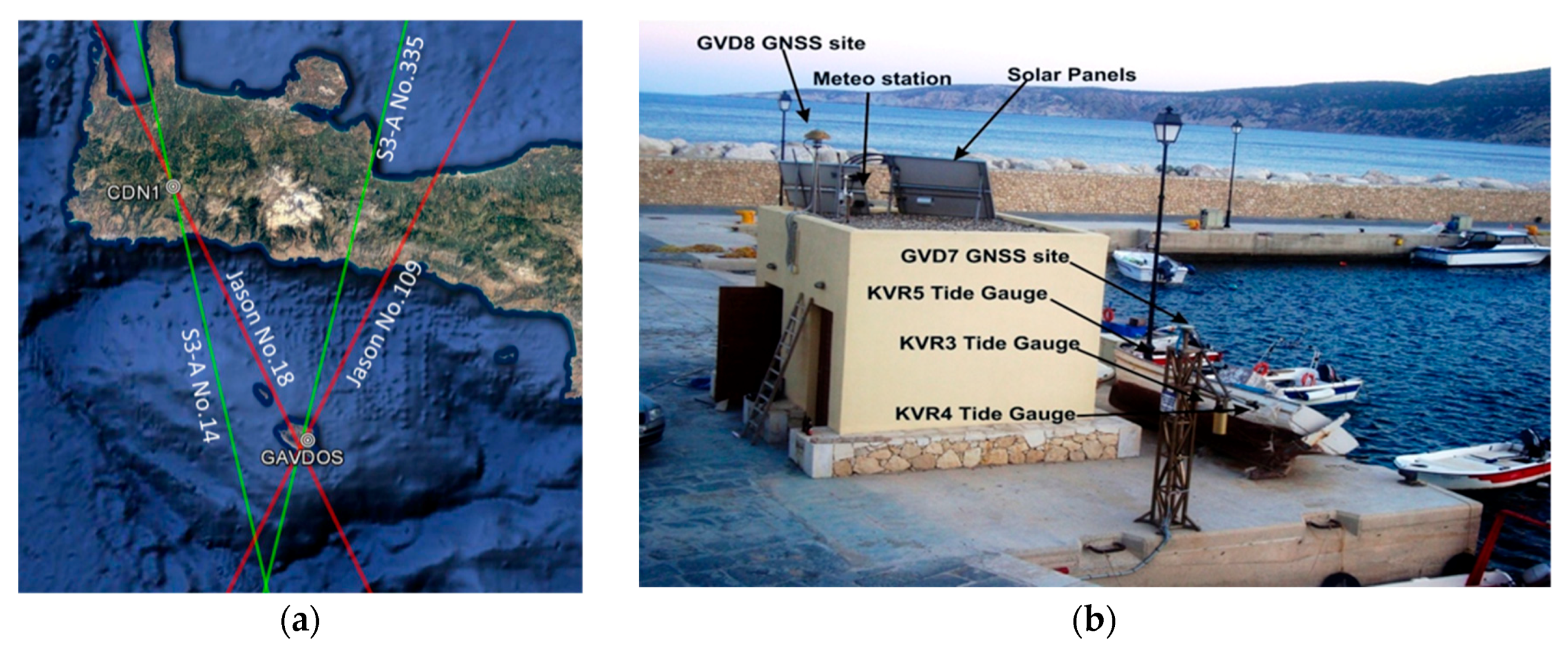
2.2. Gavdos Sea-Surface Cal/Val Facility
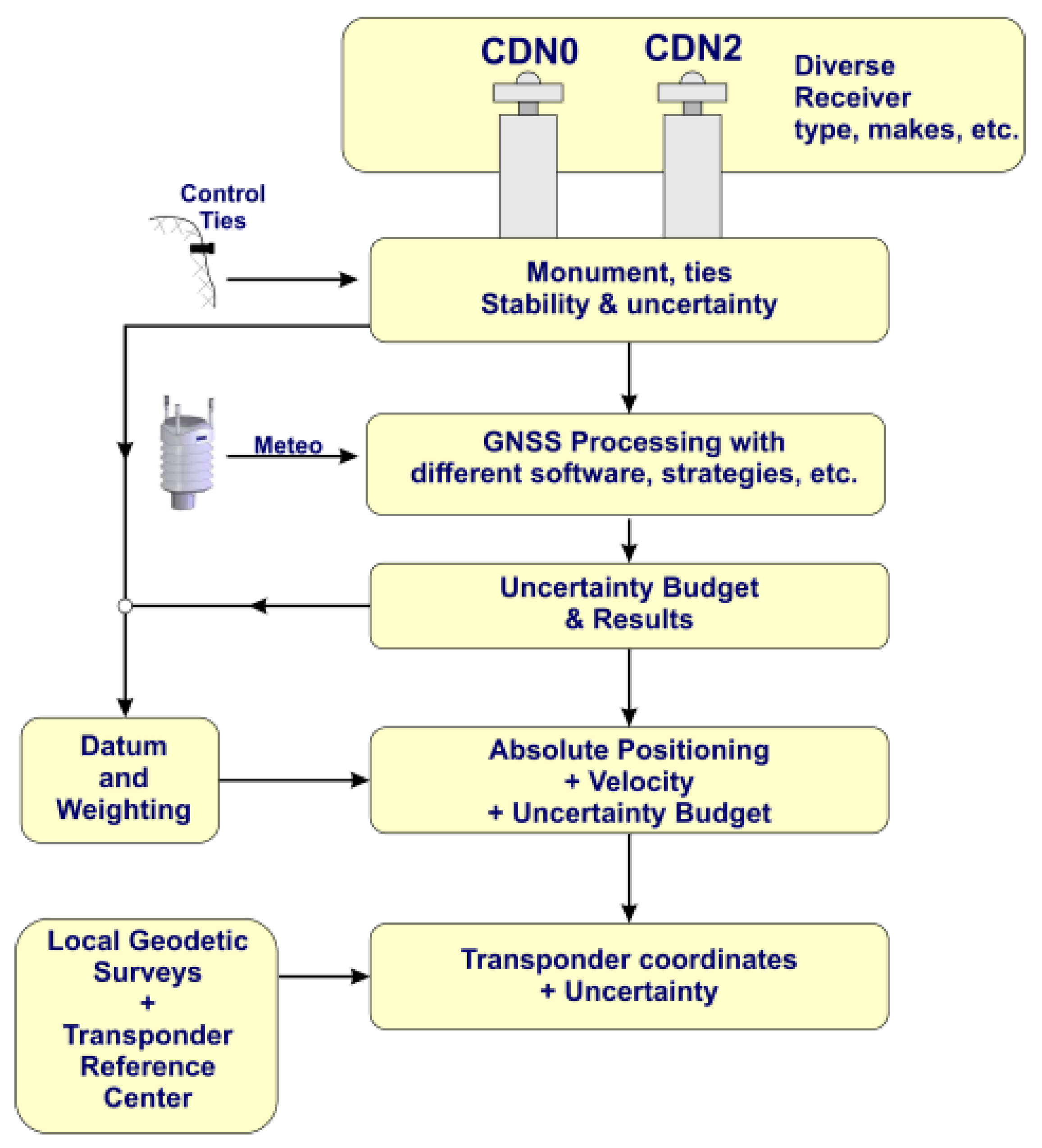
2.3. The Regional GNSS Network
3. Calibration Methodologies & Dataset Used
3.1. Transponder Calibration
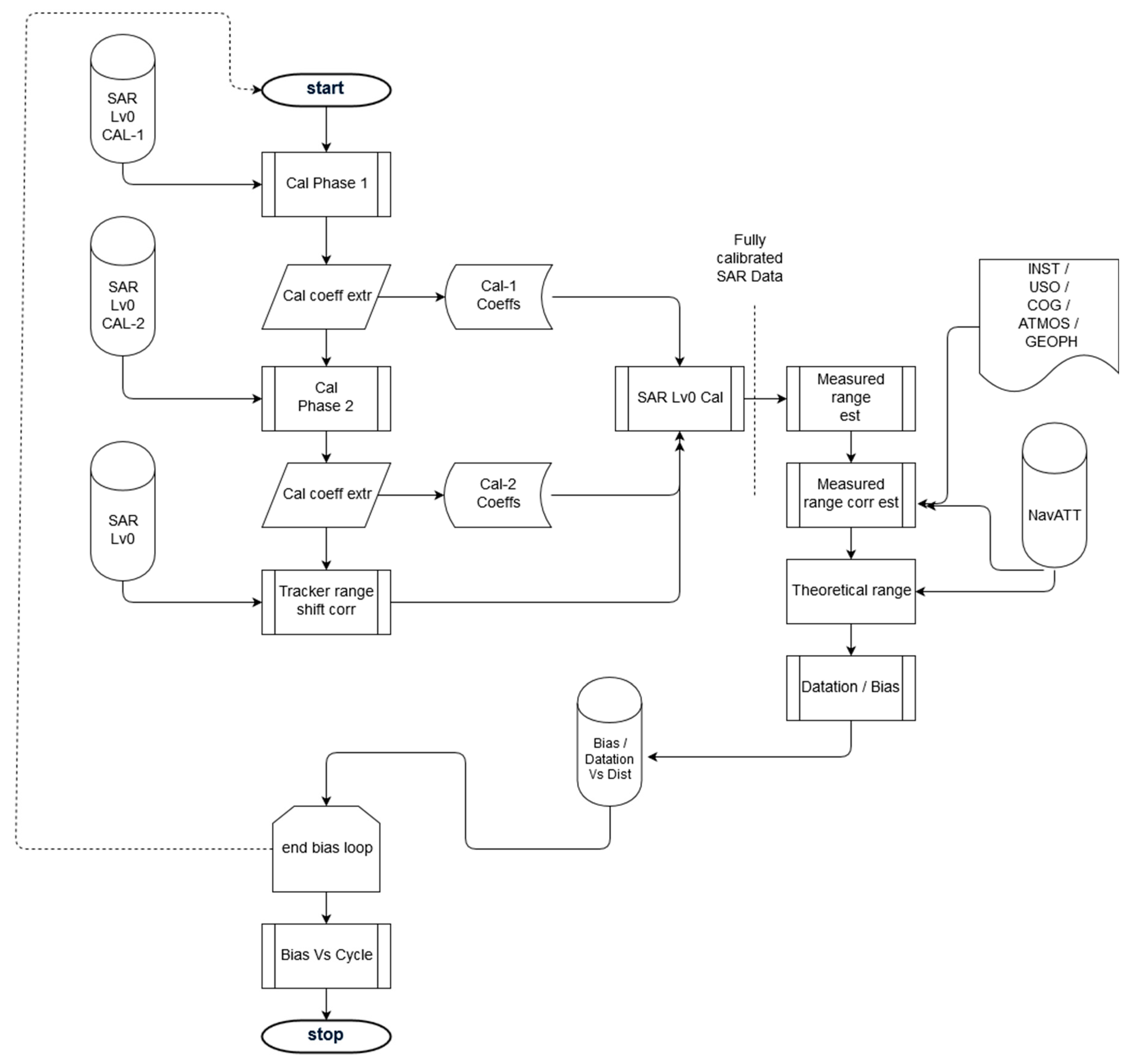
- Data retrieval. The data necessary for the implementation of the transponder calibration processing are: (a) Sentinel-3A Level-0 binary products; (b) altimeter internal calibration files; (c) satellite orbit navigation and attitude data; (d) auxiliary data, including Centre of Gravity (COG) and Ultra Stable Oscillator (USO) data; (e) accurate and absolute transponder’s measuring point coordinates in relation to a reference coordinate system (i.e., ITRF 2014); (f) atmospheric delays (i.e., wet and dry troposphere, ionosphere) of altimeter signals and geophysical Level-2 corrections; (g) the transponder’s internal path delay.
- Waveform Calibration. This step includes the calibration of the Sentinel-3A Level-0 engineering SAR data products using its internal calibration files (e.g., CAL1 for the time delay in the range instrument correction, CAL2 to compensate distortions in the system transfer function on signal returns, etc.).
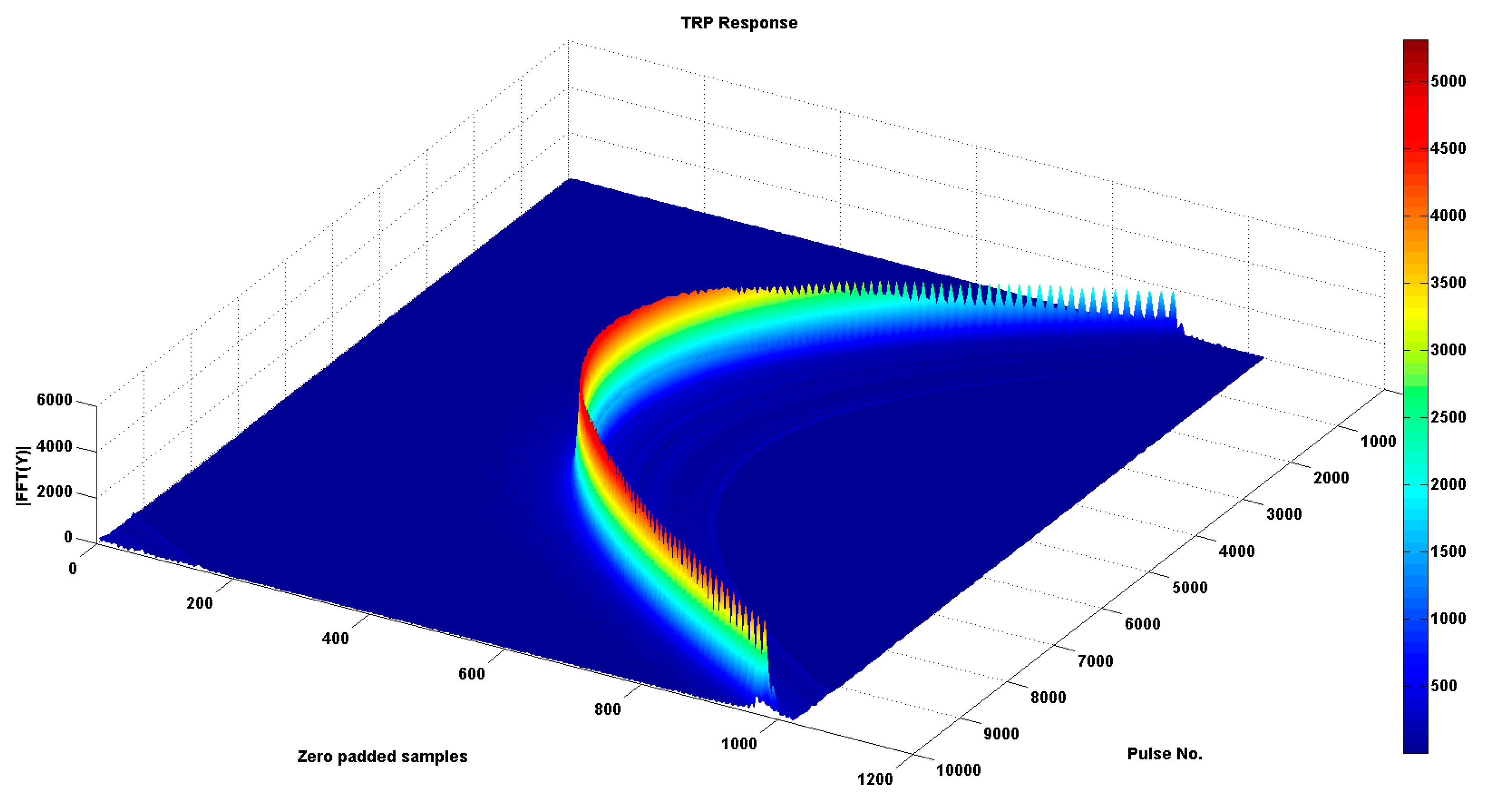
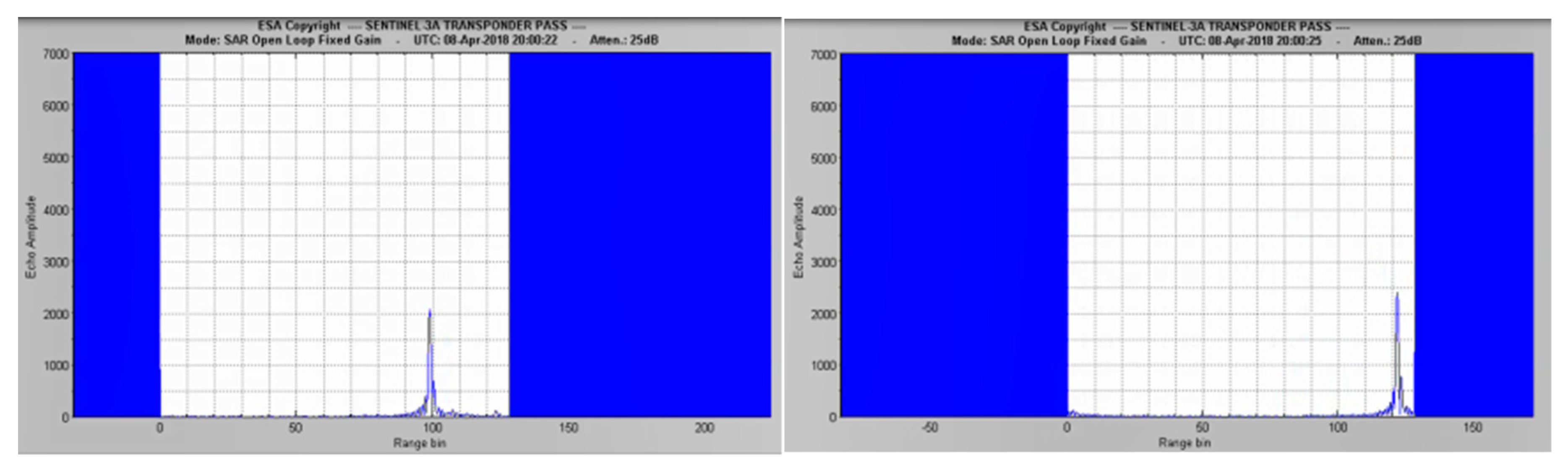
- Waveform retracking. Used for determining the measured altimeter range. Slant ranges between the satellite and the transponder are computed by waveform retracking of the range compressed SAR data. An example of such a waveform is presented in Figure 8.The measured altimeter range is given as the difference between the gate number (bin number) of the peak (maximum) of each pulse and the reference gate number set on the altimeter, multiplied by the actual “bin resolution” (in theory about 3.125 ns for the Ku-band pulse duration). For example, for Sentinel-3 the tracking point is gate 44, i.e., bin index is 43 for Ku-band, or gate 46, i.e., bin index 45 for C-band, as measuring starts from bin index zero (index = 0). Nonetheless, the effective range resolution with which the actual range is to be determined by the altimeter is driven by the width of the point target response recorded with 3dB, and included in its “Autocal” mode [23]. The measured altimeter distance between the satellite and the transponder, is given by:where is the altimeter distance from the satellite to the Earth’s surface corrected for instrumental delays, such as Ultra Stable Oscillator frequency drift, internal path correction or Doppler correction (Called “tracker range”), is the bin number of the maximum signal return by the transponder, is the reference bin number, c is the speed of light, and is the pulse duration in seconds. The altimeter range bias is computed as measured minus theoretical altimeter range after corrections are applied.
- Corrections on the observed range. The altimeter range Rm, as reckoned in the previous step, is corrected for the following quantities: (a) troposphere and ionosphere delays caused by the atmosphere onto the altimeter’s signal; (b) difference between the satellite’s center of gravity and the altimeter’s effective center of measurement; (c) drift of the Ultra Stable Oscillator in the altimeter; (d) internal delays of the associated instruments as the echo travels back and forth; (e) geophysical corrections (i.e., solid earth tides, etc.) at the transponder location; (f) Doppler correction from both altitude rate and velocity of the satellite.
- Theoretical Range Estimation. The absolute Cartesian coordinates of the satellite as well as of the transponder are, respectively, given by the satellite’s navigation files and by local geodetic surveys on the ground. Care should be taken to ensure that all coordinates refer to the same geodetic reference frame of coordinates and time. The theoretical range is then calculated by the Euclidian distance between the satellite and the transponder:
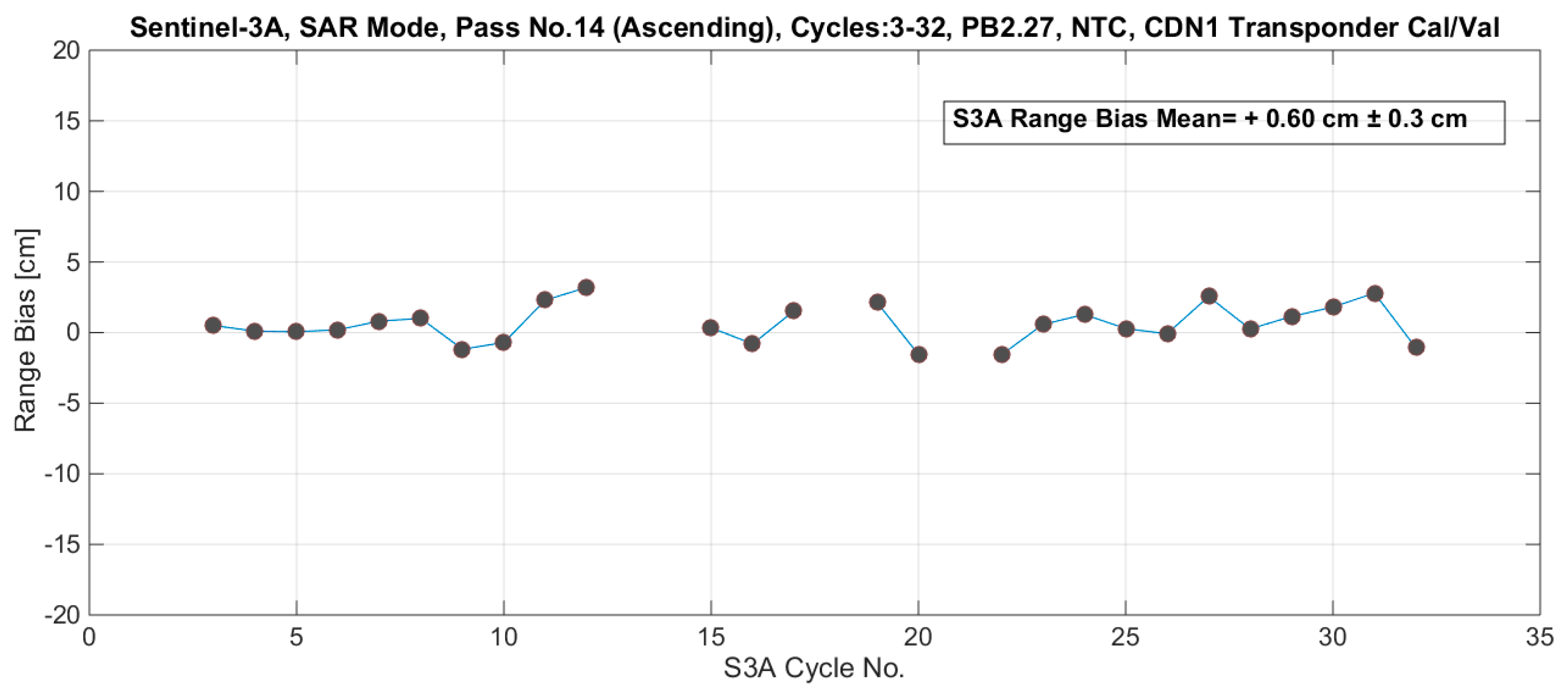
- Range Bias Determination. Given the measured and the theoretical range between the Sentinel-3A SRAL and the ground transponder, the range bias is estimated as “”, after corrections for time-tagging offsets (datation) and Doppler-altitude slope are applied [20,21,23]. All in all, the Sentinel-3A level 0 products have been used as input in the custom-made software to derive the SRAL altimeter’s absolute range bias.
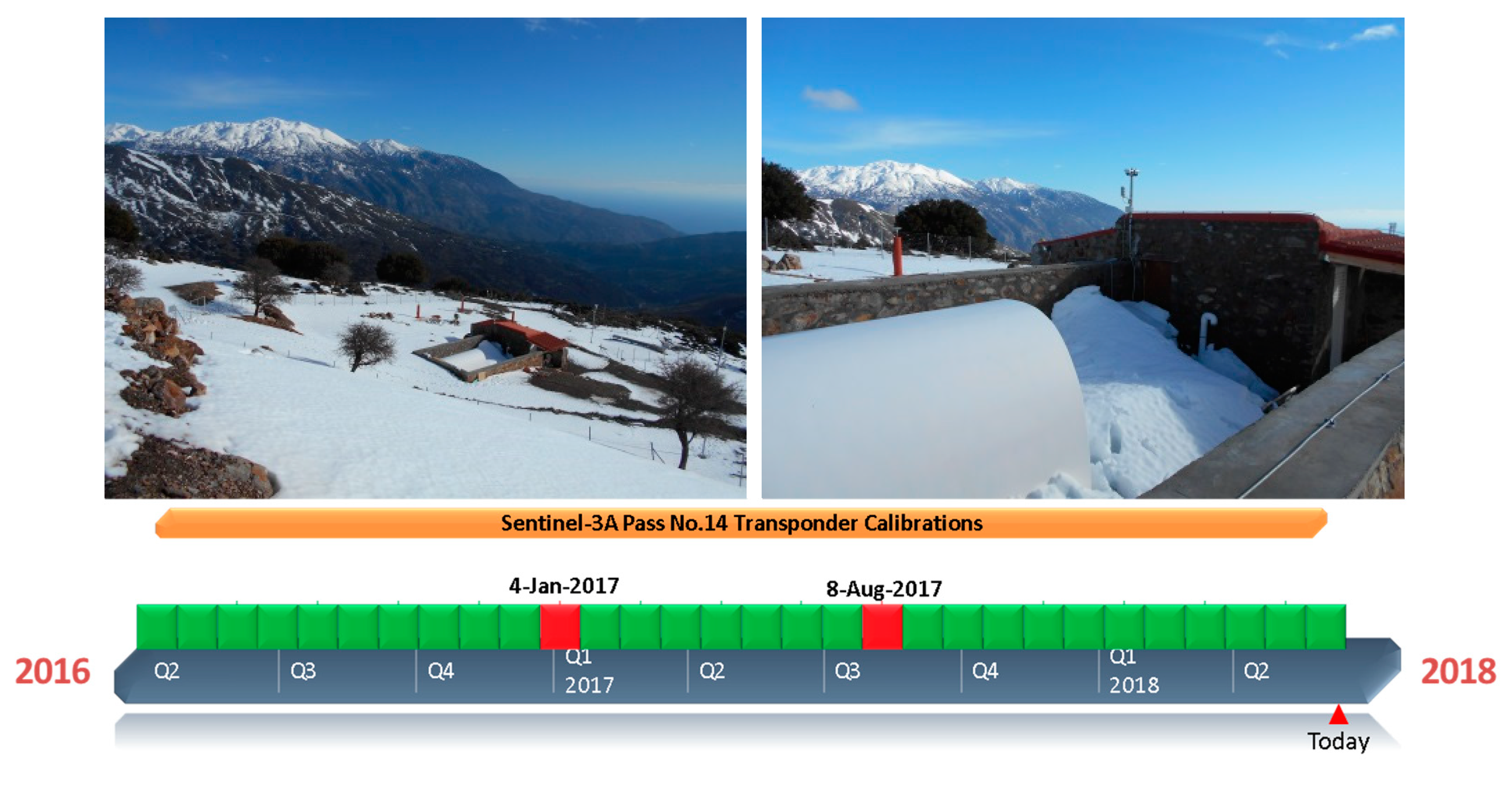
Overflights for Transponder Calibrations
3.2. Sea-Surface Calibration
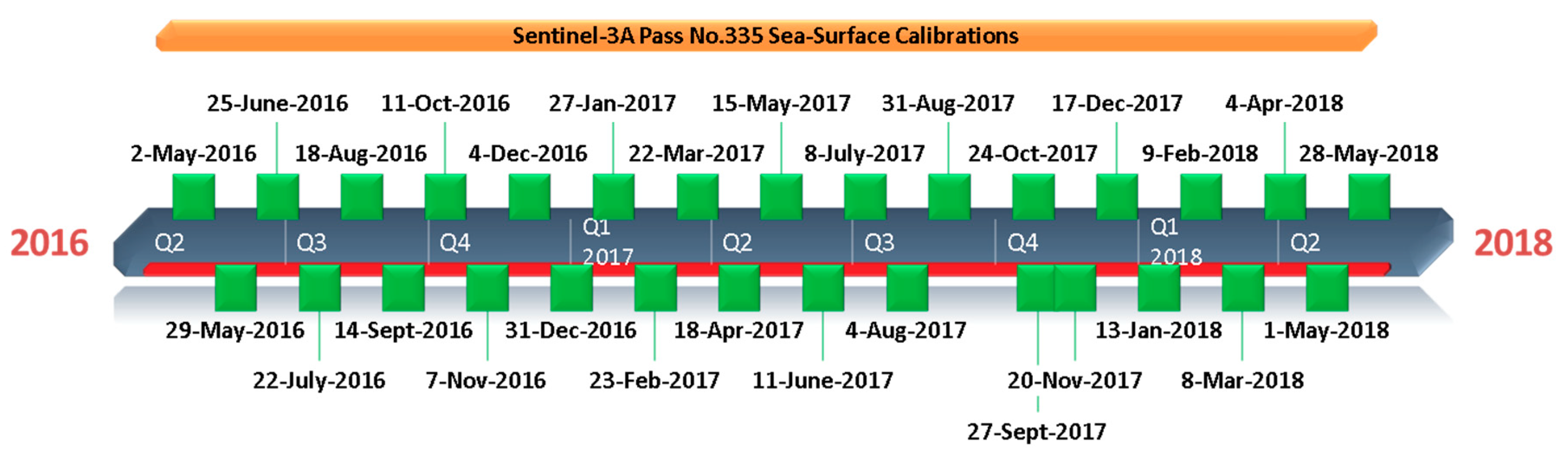
Dataset for Sea-Surface Calibration
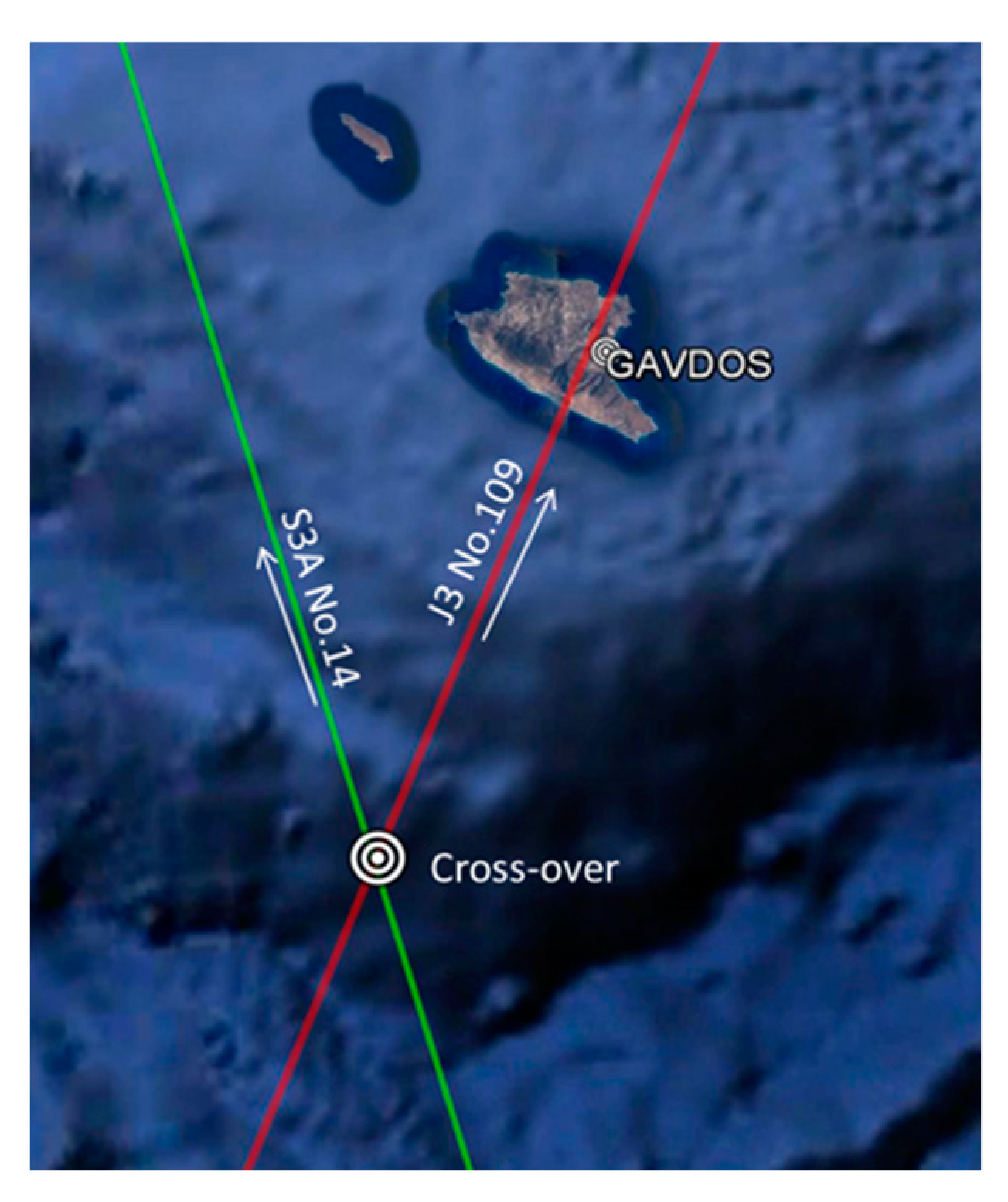
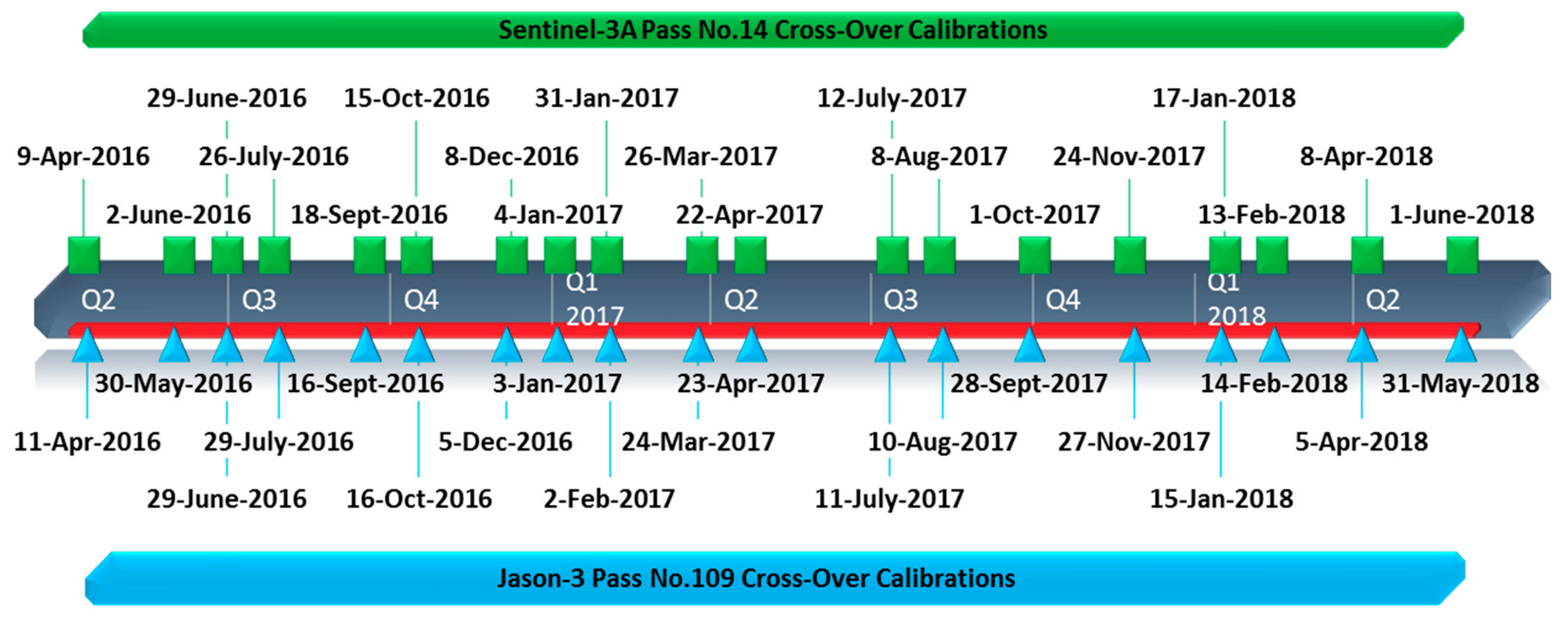
3.3. Crossover Analysis
4. Sentinel-3A SRAL and MWR Cal/Val Results
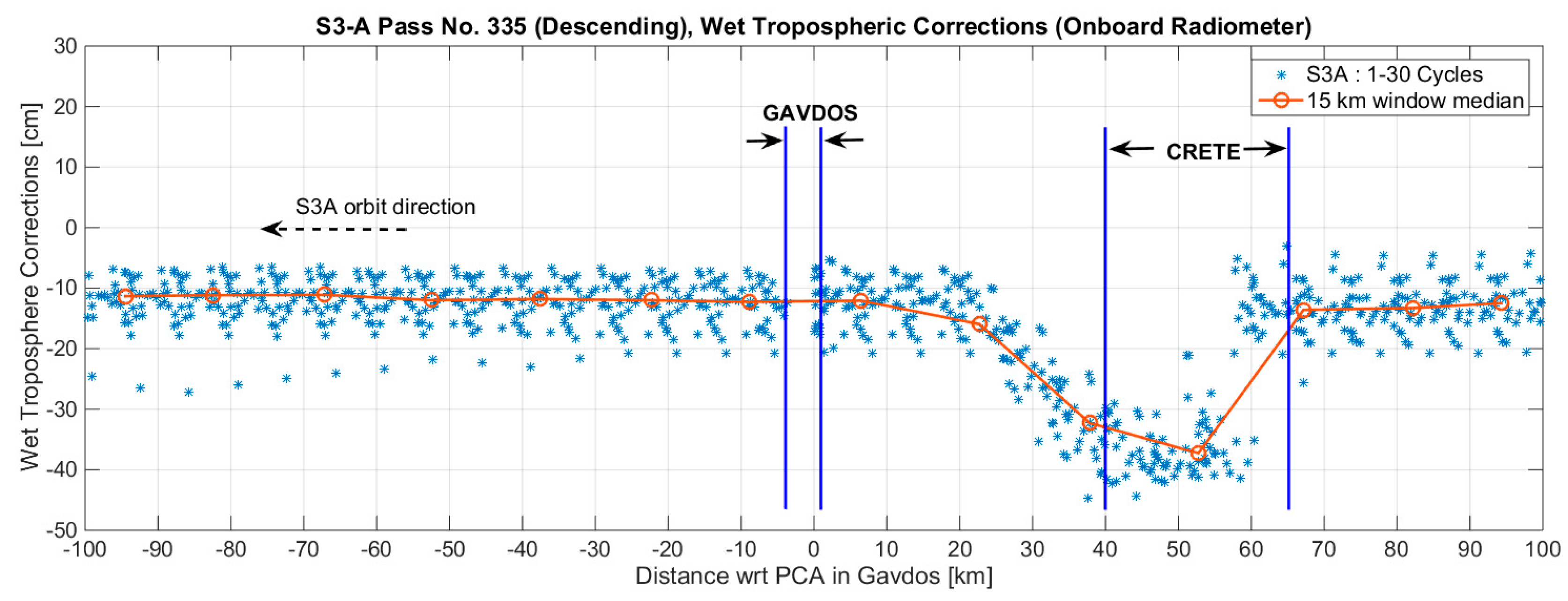
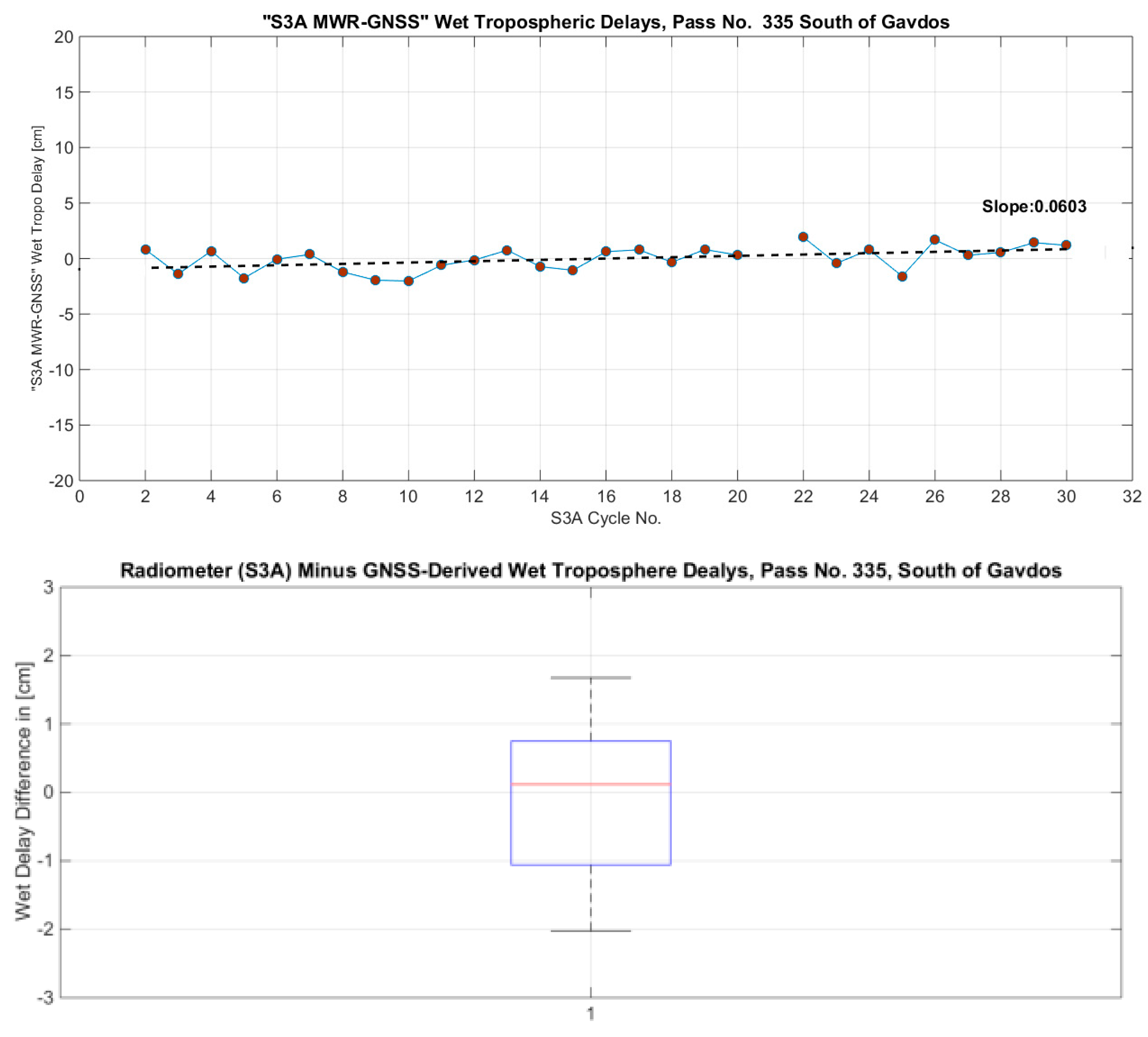
4.1. Validation of MWR Measurements
4.2. Transponder Calibration Results
Uncertainty Budget for Transponder Calibration
4.3. Sea-Surface Calibration Results
Uncertainty Budget for Sea-Surface Calibration
4.4. Summary of Transponder, Sea-Surface, and Crossover Cal/Val results
5. Conclusions and Future Plans
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- CEOS Database. Available online: http://database.eohandbook.com/database/missiontable.aspx (accessed on 20 July 2018).
- PWC. Study to Examine the Socio-Economic Impact of Copernicus in the EU; European Commission DG GROW I.3; European Commission: Brussels, Belgium, 2016. [Google Scholar]
- ESA. Sentinel-3 Family Grows. 2016. Available online: http://m.esa.int/Our_Activities/Observing_the_Earth/Copernicus/Sentinel-3/Sentinel-3_family_grows (accessed on 21 July 2018).
- ESA. Sentinel-3: ESA’s Global Land and Ocean Mission for GMES Operational Services; ESA Communications: Noordwijk, The Netherlands, 2012; ISBN 978-92-9221-420-3. [Google Scholar]
- Rebhan, H.; Goryl, P.; Donlon, C.; Féménias, P.; Bonekamp, H.; Fournier-Sicre, V.; Kwiatkowska, E.; Montagner, F.; Nogueira-Loddo, C.; O’Carroll, A. Sentinel-3 Calibration and Validation Plan; European Space Agency, European Space Research and Technology Centre: Noordwijk, The Netherlands, 2012. [Google Scholar]
- Donlon, C. Fiducial Reference Measurements for Altimetry. FRM4ALT Project Webportal. Available online: https://goo.gl/Yn23pQ (accessed on 26 June 2018).
- Mertikas, S.P.; Donlon, C.; Cullen, R.; Tripolitsiotis, A. Scientific and Operational Roadmap for Fiducial Reference Measurements in Satellite Altimetry Calibration and Validation. Int. Altimet. Cal/Val Rev. Appl. 2018. under review. [Google Scholar]
- Mertikas, S.P.; Tripolitsiotis, A.; Mavrocordatos, C.; Picot, N.; Féménias, P.; Daskalakis, A.; Boy, F. A permanent infrastructure in Crete for the calibration of Sentinel-3, Cryosat-2 and Jason missions with a transponder. In Proceedings of the ESA Living Planet Symposium 2013 (ESA SP-722), Edinburgh, UK, 9–13 September 2013. [Google Scholar]
- Mertikas, S.P.; Donlon, C.; Tripolitsiotis, A.; Mavrocordatos, C.; Tziavos, I.N.; Galanakis, D.; Andersen, O.B.; Tripolitsiotis, A.; Frantzis, X.; Lin, M.; et al. Gavdos/West Crete Cal/Val site: Over a decade calibrations for Jason series, SARAL/AltiKa, CryoSat-2, Sentinel-3 and HY-2 altimeter satelites. In Proceedings of the ESA Living Planet Symposium 2013 (ESA SP-740), Prague, Czech Republic, 9–13 May 2016. [Google Scholar]
- Kolenkiewicz, R.; Martin, C.F. Satellite Altimeter Calibration Techniques. Adv. Space Res. 1990, 10, 269–277. [Google Scholar] [CrossRef]
- Christensen, E.J.; Haines, B.J.; Keihm, S.J.; Morris, C.S.; Norman, R.A.; Purcell, G.H.; Williams, B.G.; Wilson, B.D.; Born, G.H.; Parke, M.E.; et al. Calibration of TOPEX/POSEIDON at Platform Harvest. J. Geophys. Res. 1994, 99, 24465–24485. [Google Scholar] [CrossRef]
- Menard, Y. Calibration of the TOPEX/POSEIDON altimeters at Lampedusa: Additional results at Harvest. J. Geophys. Res. 1994, 99, 24487–24504. [Google Scholar] [CrossRef]
- Pesec, P.; Sunkel, H.; Fachbach, N. Transponders for Altimeter Calibration and Height Transfer. VGI— Österreichische Zeitschrift fü Vermessung Geoinf. 1996, 84, 252–256. [Google Scholar]
- Cristea, E.; Moore, P. Altimeter bias determination using two years of transponder observations. In Proceedings of the “Envisat Symposium” 2007 (ESA SP-636); Lacoste, H., Ouwehand, L., Eds.; ESA Publications Division; European Space Agency: Noordwijk, The Netherlands, 2007. [Google Scholar]
- Hausleitner, W.; Moser, F.; Desjonqueres, J.D.; Boy, F.; Picot, N.; Weingrill, J.; Mertikas, S.; Daskalakis, A. A New Method of Precise Jason-2 Altimeter Calibration Using a Microwave Transponder. Mar. Geod. 2012, 35, 337–362. [Google Scholar] [CrossRef]
- Fornari, M.; Scagliola, M.; Tagliani, N.; Parrinello, T.; Mondejar, A.G. CryoSat SIRAL Calibration and Performance. IEEE Geosci. Remote Sens. 2014, 702–705. [Google Scholar] [CrossRef]
- Mertikas, S.P.; Donlon, C.; Mavrocordatos, C.; Tripolitsiotis, A.; Féménias, P.; Galanakis, D.; Tziavos, I.N.; Boy, F.; Vergos, G.; Andersen, O.B.; et al. Multi-mission calibration results at the Permanent Facility for Altimetry Calibration in west Crete, Greece attaining Fiducial Reference Measurement Standards. In Proceedings of the Ocean Surface Topography Science Team Meeting 2017, Miami, FL, USA, 23–27 October 2017. [Google Scholar]
- Mondejar, A.; Mertikas, S.; Galanakis, D.; Labroue, S.; Bruniquel, J.; Quartly, G.; Féménias, P.; Mavrocordatos, C.; Wood, J.; Garcia, P.; et al. Sentinel-3 Transponder Calibration Results. In Proceedings of the Ocean Surface Topography Science Team Meeting 2017, Miami, FL, USA, 23–27 October 2017. [Google Scholar] [CrossRef]
- Egido, A. Fully focused SAR altimetry: Theory and Applications. IEEE Trans. Geosci. Remote Sens. 2017, 55, 392–406. [Google Scholar] [CrossRef]
- Raney, R.K. The delay/Doppler radar altimeter. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1578–1588. [Google Scholar] [CrossRef]
- Raynal, M.; Labroue, S.; Moreau, T.; Boy, F.; Picot, N. From conventional to Delay Doppler altimetry: A demonstration of continuity and improvements with the CryoSat-2 mission. Adv. Space Res. 2018. [Google Scholar] [CrossRef]
- Radar Altimetry Tutorial & Toolbox. Available online: http://www.altimetry.info/toolbox/ (accessed on 1 August 2018).
- Garcia, P. S3-A SRAL Cyclic Performance Report; Sentinel-3 Mission Performance Centre, 2017. Available online: https://sentinel.esa.int/documents/247904/2829969/Sentinel-3-MPC-SRAL-Cyclic-Report-020 (accessed on 14 November 2018).
- Haines, B.J.; Desai, S.; Born, G. The Harvest Experiment: Calibration of the climate data record from TOPEX/Poseidon, Jason-1 and the Ocean Surface Topography Mission. Mar. Geod. 2010, 33, 91–113. [Google Scholar] [CrossRef]
- Watson, C.; White, N.; Church, J.; Reed, B.; Paul, T.; Richard, C. Absolute calibration in Bass Strait, Australia: TOPEX, Jason-1 and OSTM/Jason-2. Mar. Geod. 2011, 34, 242–260. [Google Scholar] [CrossRef]
- Bonnefond, P.; Exertier, P.; Laurain, O.; Guillot, A.; Picot, N.; Cancet, M.; Lyard, F. SARAL/AltiKa Absolute calibration from the multi-mission Corsica facilities. Mar. Geod. 2015, 38, 171–192. [Google Scholar] [CrossRef]
- Mertikas, S.P.; Ioannides, R.T.; Tziavos, I.N.; Vergos, G.S.; Hausleitner, W.; Frantzis, X.; Tripolitsiotis, A.; Partsinevelos, P.; Andrikopoulos, D. Statistical models and latest results in the determination of the absolute bias for the radar altimeters of Jason satellites using the Gavdos facility. Mar. Geod. 2010, 33, 114–149. [Google Scholar] [CrossRef]
- Tziavos, I.N.; Vergos, G.S.; Mertikas, S.P.; Daskalakis, A.; Grigoriadis, V.N.; Tripolitsiotis, A. The contribution of local gravimetric geoid models to the calibration of satellite altimetry data and an outlook of the latest GOCE GGM performance in GAVDOS. Adv. Space Res. 2013, 51, 1502–1522. [Google Scholar] [CrossRef]
- Mertikas, S.P.; Daskalakis, A.; Tziavos, I.N.; Andersen, O.B.; Vergos, G.; Tripolitsiotis, A.; Zervakis, V.; Frantzis, X.; Partsinevelos, P. Altimetry, bathymetry and geoid variations at the Gavdos permanent Cal/Val facility. Adv. Space Res. 2012, 51, 1418–1437. [Google Scholar] [CrossRef]
- Vergos, G.S.; Tziavos, I.N.; Andritsanos, V.D. On the determination of marine geoid models by least-squares collocation and spectral methods using heterogeneous data. In A Window on the Future of Geodesy; Sanso, E., Ed.; International Association of Geodesy Symposia; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar] [CrossRef]
- Dettmering, D.; Bosch, W. Global Calibration of Jason-2 by multi-mission crossover analysis. Mar. Geod. 2010, 33, 150–161. [Google Scholar] [CrossRef]
- Tai, C.K.; Fu, L.L. On crossover adjustment in satellite altimetry and its oceanographic implications. J. Geophys. Res. 1986, 91, 2549–2554. [Google Scholar] [CrossRef]
- Bosch, W.; Dettmering, D.; Schwatke, C. Multi-mission cross-calibration of satellite altimeters: Constructing a long-term data record for global and regional sea level change studies. Remote Sens. 2014, 6, 2255–2281. [Google Scholar] [CrossRef]
- Bosch, W.; Savcenko, R. Satellite altimetry: Multi-mission cross calibration. In Dynamic Planet; Tregoring, P., Rizos, C., Eds.; International Association of Geodesy Symposia; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Mertikas, S.; Donlon, C.; Féménias, P.; Mavrocordatos, C.; Galanakis, D.; Tripolitsiotis, A.; Frantzis, X.; Tziavos, I.N.; Vergos, G.; Andersen, O.B.; et al. Fifteen years of Cal/Val service to reference altimetry missions: Calibration of satellite altimetry at the Permanent Facilities in Gavdos and Crete, Greece. Remote Sens. 2018, 10, 1557. [Google Scholar] [CrossRef]
- Fernandes, M.J.; Lazaro, C. Independent assessment of Sentinel-3A wet tropospheric correction over the opean and coastal ocean. Remote Sens. 2018, 10, 484. [Google Scholar] [CrossRef]
- Snajdrova, K.; Boehm, J.; Willis, P.; Hass, R.; Schuh, H. Multi-technique comparison of tropospheric zenith delays derived during the CONT02 campaign. J. Geod. 2006, 79, 613–623. [Google Scholar] [CrossRef]
- BIPM. International Vocabulary of Metrology-Basic and General Concepts and Associated Terms (VIM), 3rd ed.; JCGM/WG 2 Doc. N313; Bureau Int. des Poids et Mesures: Sevres, France, 2012. [Google Scholar]
- Mertikas, S.P.; Donlon, C.; Femenias, P.; Mavrocordatos, C.; Galanakis, D.; Guinle, T.; Boy, F.; Tripolitsiotis, A.; Frantzis, X.; Tziavos, I.N.; et al. Fiducial Reference Measurements for Satellite Altimetry Calibration: The Constituents. Int. Altimet. Cal/Val Rev. Appl. 2018. under review. [Google Scholar]
- Ratcliffe, C.; Ratcliffe, B. Doubt-Free Uncertainty in Measurement: An Introduction for Engineers and Students; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar]
- Pires, N.; Fernandes, M.J.; Gommenginger, C.; Scharroo, R. Improved sea state bias estimation for altimeter reference missions with altimeter-only three-parameter models. IEEE Trans. Geosci. Remote Sens. 2018, 99, 1–15. [Google Scholar] [CrossRef]
- Bonnefond, P.; Exertier, P.; Laurain, O.; Guillot, A.; Guinle, T.; Picot, N.; Femenias, P.; Parrinello, T.; Dinardo, S. Corsica: A multi-mission absolute calibration site. In Proceedings of the Ocean Surface Topography Science Team Meeting 2017, Miami, FL, USA, 23–27 October 2017. [Google Scholar]
- Watson, C.; Legresy, B.; King, M.; Deane, A. Absolute altimeter bias results from Bass Strait, Australia. In Proceedings of the Ocean Surface Topography Science Team Meeting 2018, Ponta Delgada, Portugal, 24–29 September 2018. [Google Scholar]
- Bonnefond, P.; Exertier, P.; Laurain, O.; Guinle, T.; Féménias, P. Corsica: A 20-Yr multi-mission absolute altimeter calibration site. In Proceedings of the Ocean Surface Topography Science Team Meeting 2018, Ponta Delgada, Portugal, 24–29 September 2018. [Google Scholar]
- Garcia-Mondejar, A.; Zhao, Z.; Rhines, P. Sentinel-3 Range and Datation Calibration with Crete transponder. In Proceedings of the 25 Years of Progress in Radar Altimetry, Ponta Delgada, Portugal, 24–29 September 2018. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Contributing Error Constituent | Error Type | Variance Estimate | Standard Uncertainty |
|---|---|---|---|
| Measured range | B | 3.00 mm | ±1.73 mm |
| Transponder Internal Delay | B | 30.00 mm | ±15.00 mm |
| Dry Tropospheric Delay | B | 2.00 mm | ±1.16 mm |
| Wet Tropospheric Delay | B | 14.00 mm | ±8.10 mm |
| Ionospheric Delay | B | 4.00 mm | ±2.31 mm |
| Geophysical corrections | B | 20.00 mm | ±11.60 mm |
| Satellite orbit height | B | 50.00 mm | ±29.00 mm |
| Pseudo-Doppler correction | B | 2.00 mm | ±1.16 mm |
| GNSS instrument | B | 6.00 mm | ±3.50 mm |
| GNSS antenna reference point | B | 4.00 mm | ±2.00 mm |
| GNSS repeatability | A | 6.00 mm | ±0.17 mm |
| GNSS-Transponder Leveling | A | 1.00 mm | ±0.18 mm |
| Levelling instrument/method | B | 1.00 mm | ±0.60 mm |
| Processing & Approximations | B | 30.00 mm | ±17.34 mm |
| Orbit Interpolations | B | 0.30 mm | ±0.17 mm |
| Unaccounted effects | B | 20.00 mm | ±11.60 mm |
| Root-Sum Squared (Combined) | ±41.50 mm |
| Error Constituent | Type | Variance Estimate | Standard Uncertainty |
|---|---|---|---|
| Cal/Val Site Coordinates | |||
| GNSS height | A | 0.10 mm | ±0.10 mm |
| GNSS receiver | B | 6.00 mm | ±3.50 mm |
| Antenna reference point | B | 2.00 mm | ±2.00 mm |
| SSH@Cal/Val site | |||
| Water level | A | 1.30 mm | ±1.30 mm |
| Tide gauge zero point | A | 0.15 mm | ±0.15 mm |
| Tide gauge vertical alignment | B | 2.40 mm | ±1.40 mm |
| Tide gauge certificate | B | 5.50mm | ±5.50 mm |
| Leveling repeatability | A | 0.12 mm | ±0.12 mm |
| Monumentation | B | 1.10 mm | ±0.64 mm |
| Vertical misalignment | B | 1.00 mm | ±0.60 mm |
| Leveling observer | B | 1.00 mm | ±0.60 mm |
| Leveling instrument/method | B | 1.00 mm | ±0.60 mm |
| Tide pole reading | B | 1.00 mm | ±0.60 mm |
| MSS/MDT/Geoid | |||
| MSS | B | 33.00 mm | ±33.00 mm |
| MDT | B | 85.00 mm | ±85.00 mm |
| Geoid | B | 80.00 mm | ±46.20 mm |
| Processing Errors | |||
| Processing | B | 0.50 mm | ±0.30 mm |
| Geoid slope/offshore transfer | B | 10.00 mm | ±5.80 mm |
| Unaccounted | |||
| Unaccounted effects | B | 20.00 mm | ±11.55 mm |
| Root-sum-Squared Uncertainty | ±36.1 mm |
| Bias [mm] | Sentinel-3A | Ascending No.14 | Descending No.335 | FRM Uncertainty |
|---|---|---|---|---|
| Product | PB 2.27, NTC | PB 2.27, NTC | ||
| Cycles | 3–32 | 1–31 | ||
| Range Bias | Transponder | +0.60 cm ± 0.3 cm | ±4.1 cm (68%) | |
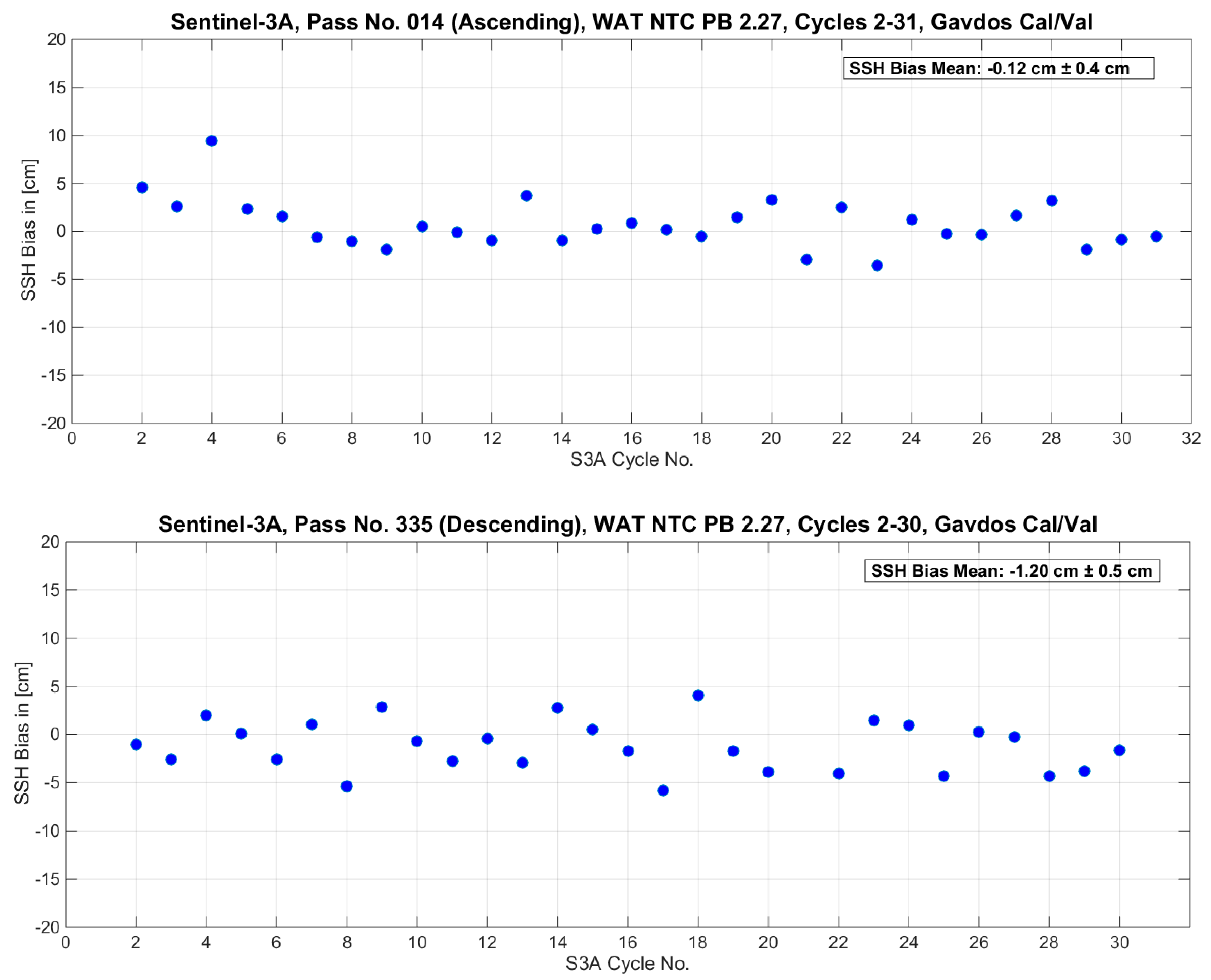
| SSH Bias | Gavdos Cal/Val | −0.12 cm ± 0.4 cm | −1.20 cm ± 0.5 cm | ±3.60 cm (68%) |
| Crossover Analysis | S3A-JA3 | +4.00 cm ± 8 cm |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mertikas, S.; Donlon, C.; Féménias, P.; Mavrocordatos, C.; Galanakis, D.; Tripolitsiotis, A.; Frantzis, X.; Kokolakis, C.; Tziavos, I.N.; Vergos, G.; et al. Absolute Calibration of the European Sentinel-3A Surface Topography Mission over the Permanent Facility for Altimetry Calibration in west Crete, Greece. Remote Sens. 2018, 10, 1808. https://doi.org/10.3390/rs10111808
Mertikas S, Donlon C, Féménias P, Mavrocordatos C, Galanakis D, Tripolitsiotis A, Frantzis X, Kokolakis C, Tziavos IN, Vergos G, et al. Absolute Calibration of the European Sentinel-3A Surface Topography Mission over the Permanent Facility for Altimetry Calibration in west Crete, Greece. Remote Sensing. 2018; 10(11):1808. https://doi.org/10.3390/rs10111808
Chicago/Turabian StyleMertikas, Stelios, Craig Donlon, Pierre Féménias, Constantin Mavrocordatos, Demitris Galanakis, Achilles Tripolitsiotis, Xenophon Frantzis, Costas Kokolakis, Ilias N. Tziavos, George Vergos, and et al. 2018. "Absolute Calibration of the European Sentinel-3A Surface Topography Mission over the Permanent Facility for Altimetry Calibration in west Crete, Greece" Remote Sensing 10, no. 11: 1808. https://doi.org/10.3390/rs10111808
APA StyleMertikas, S., Donlon, C., Féménias, P., Mavrocordatos, C., Galanakis, D., Tripolitsiotis, A., Frantzis, X., Kokolakis, C., Tziavos, I. N., Vergos, G., & Guinle, T. (2018). Absolute Calibration of the European Sentinel-3A Surface Topography Mission over the Permanent Facility for Altimetry Calibration in west Crete, Greece. Remote Sensing, 10(11), 1808. https://doi.org/10.3390/rs10111808