Coherent Auto-Calibration of APE and NsRCM under Fast Back-Projection Image Formation for Airborne SAR Imaging in Highly-Squint Angle



Abstract
:
1. Introduction
2. Squint SAR Geometry and Signal Model
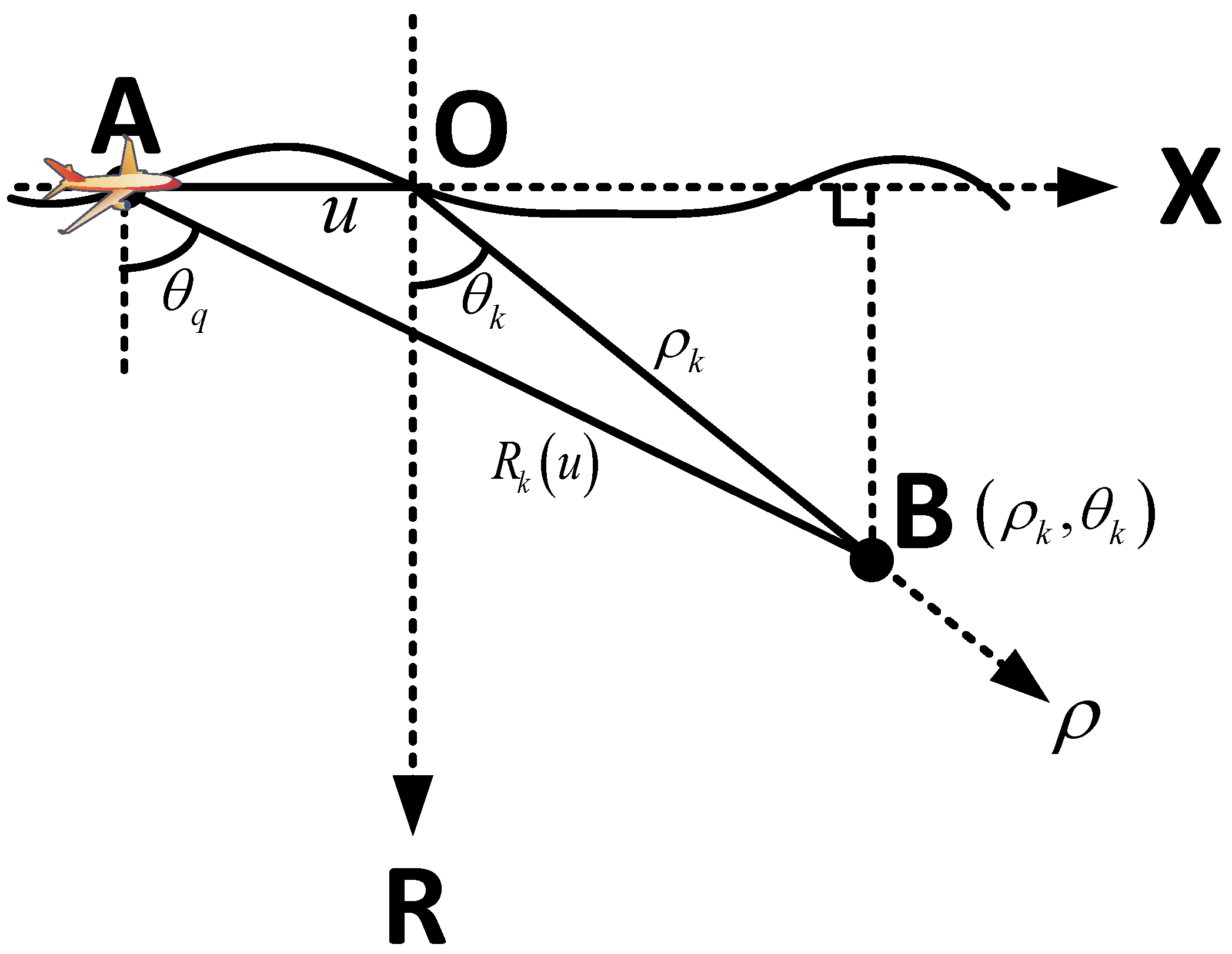
2.1. Squint SAR Geometry
2.2. Signal Model
3. Fast Factorized Back-Projection
4. Motion Error Auto-Calibration
4.1. Motion Error Effects
4.2. Coherent Relationship between APE and RCM
4.3. Coherent Motion Error Compensation
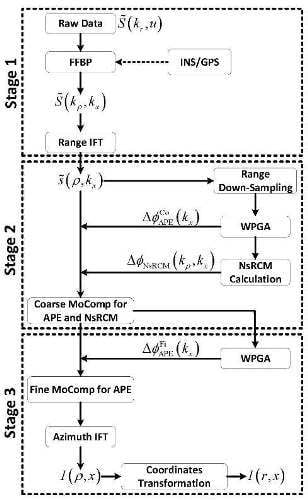
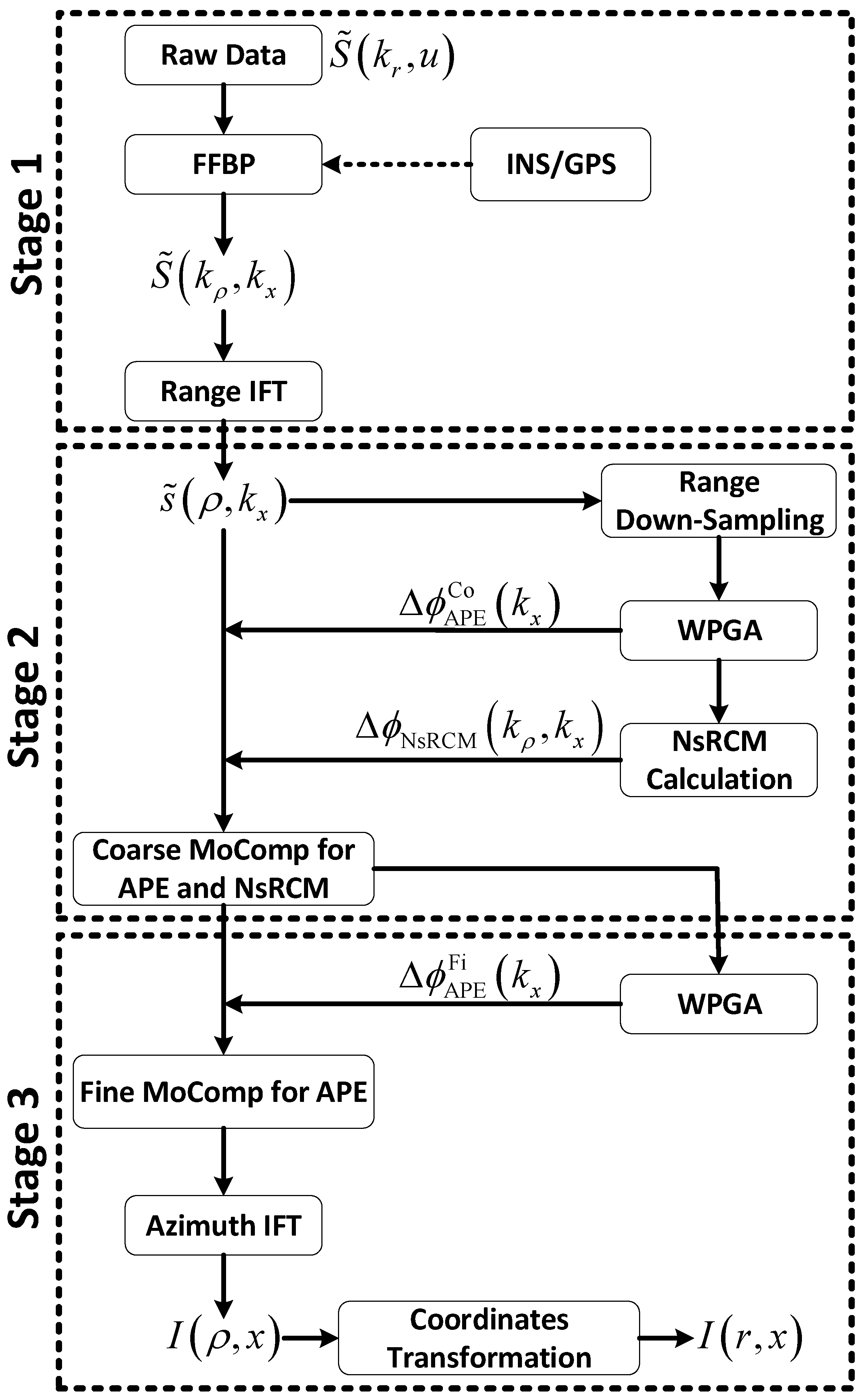
5. Processing Procedure
- Stage 1: FFBP SAR IFP. At the first stage, the raw data collected at a large squint angle will be pre-processed. Either matched-filtering or de-chirping can be applied for the range de-ramp. Then, the data as described in Equation (4) are processed by FFBP for the SAR IFP. FFBP as one of the classic FTDBP algorithms is capable of generating high-resolution SAR images without limitation on the squint angle. To accommodate the airborne application, if the airborne INU and GPS are available, they can be useful to preliminarily compensate the airborne SAR motion deviations/errors [25]. When no navigational data are available or only low accuracy data are available, the proposed algorithm still has the capability to compensate the error in a data-driven manner. To facilitate the FFBP SAR IFP with the data-driven error auto-calibration, the novel FFBP implementation in a quasi-polar grid is employed [13], and the data are transformed into the 2D wavenumber domain as in Equation (12). For the following motion error compensation, the data are further transformed into the range-compressed domain by a range IFT.
- Stage 2: Coarse auto-calibration. At the second stage, the error auto-calibration process is carried out in the range-compressed data domain as in Equation (17). To reduce the influence of the NsRCM on the APE estimation, range down-sampling will be performed [21]. Then, WPGA is employed to achieve the APE estimation . According to the relationship developed in Equation (20), the NsRCM error function can be simply calculated as . Accordingly, a coarse Motion error Compensation (MoComp) can be implemented with a coarse compensation for the APE and simultaneously a complete compensation for the NsRCM error. Though only a relatively coarse accuracy of the APE estimate is obtained, it is accurate enough for the compensation of the NsRCM error [21].
- Stage 3: Fine auto-calibration. At the third stage, a fine MoComp is performed to compensate the residual APE for a well-focused SAR image. WPGA is adopted again for the residual APE estimation. As the NsRCM error has been removed in the second stage, there is no need to carry out the down-sampling. Therefore, the fine MoComp is implemented with only the residual APE correction. Finally, an azimuth IFT is applied to achieve the focused SAR image as shown in in Equation (19). As the proposed algorithm is performed in the quasi-polar grid , the achieved SAR image as in Equation (19) should be finally transformed into the Cartesian coordinates on the slant-range plane as .
6. Discussions
7. Experiments
7.1. Simulations
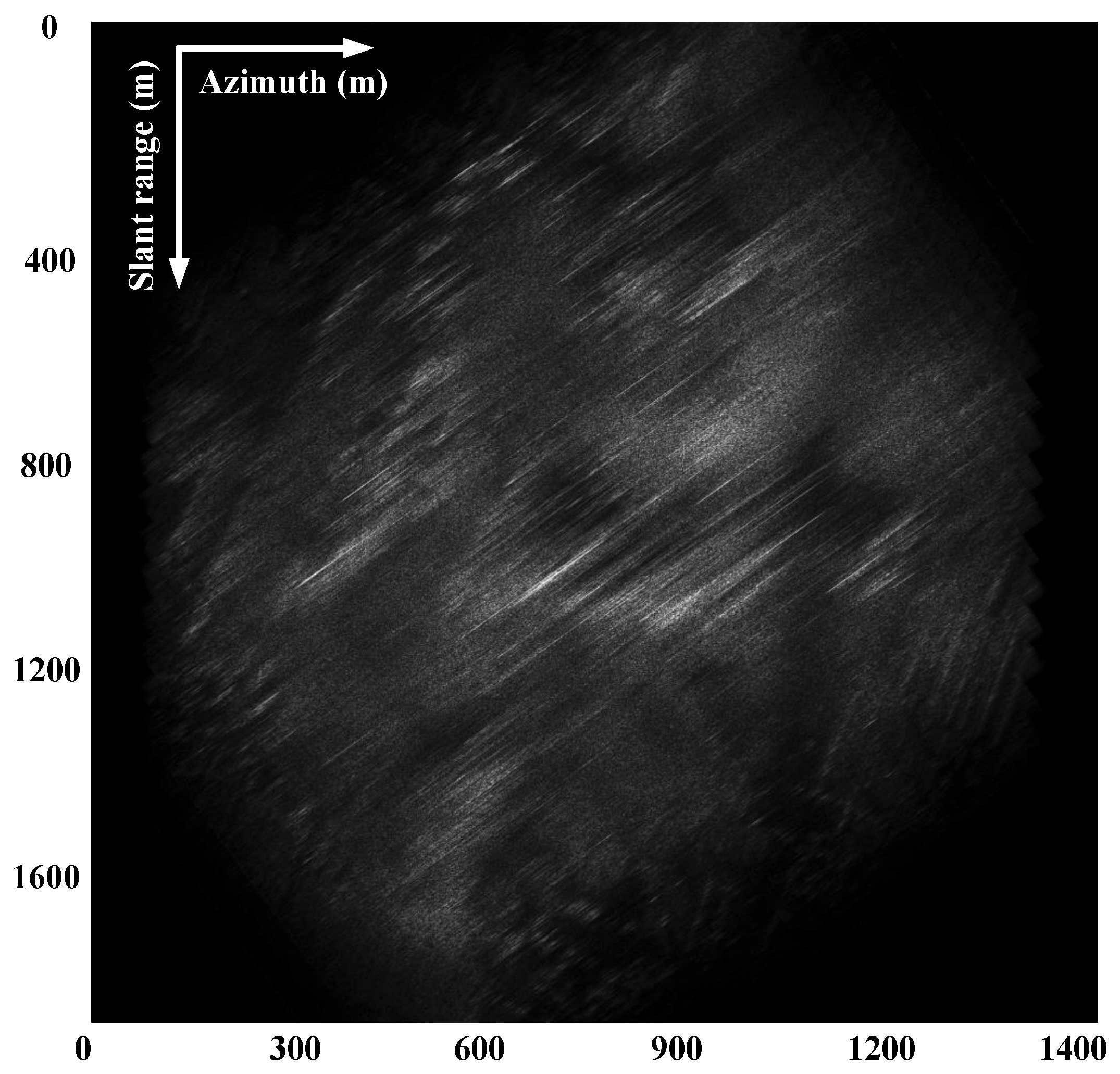
7.2. Raw Data Experiments
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| SAR | Synthetic Aperture Radar |
| IFP | Image Formation Processing |
| TDBP | Time-Domain Back-Projection |
| FTDBP | Fast Time-Domain Back-Projection |
| FFBP | Fast Factorized Back-Projection |
| APE | Azimuthal Phase Error |
| NsRCM | Non-systematic Range Cell Migration |
| DPAs | Doppler Processing Algorithms |
| MoComp | Motion Compensation |
| MD | Map-Drift |
| PGA | Phase Gradient Autofocusing |
| MEA | Minimum Entropy Autofocusing |
| WPGA | Weighted Phase Gradient Autofocusing |
| INU | Inertial Navigation Unit |
| GPS | Global Positioning System |
| PRF | Pulse Repetition Frequency |
| UAV | Unmanned Aerial Vehicle |
| PSLR | Peak Sidelobe Ratio |
| ISLR | Integrated Sidelobe Ratio |
References
- Carrara, W.G.; Goodman, R.S.; Majewski, R.M. Spotlight Synthetic Aperture Radar: Signal Processing Algorithms; Artech House: Norwood, MA, USA, 1995. [Google Scholar]
- Cumming, I.G.; Wong, F.H. Digital Signal Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Artech House: Norwood, MA, USA, 2004. [Google Scholar]
- Stroppiana, D.; Azar, R.; Calò, F.; Pepe, A.; Imperatore, P.; Boschetti, M.; Silva, J.M.N.; Brivio, P.A.; Lanari, R. Integration of Optical and SAR Data for Burned Area Mapping in Mediterranean Regions. Remote Sens. 2015, 2, 1320–1345. [Google Scholar] [CrossRef]
- Ran, L.; Liu, Z.; Li, T.; Xie, R.; Zhang, L. An Adaptive Fast Factorized Back-Projection Algorithm With Integrated Target Detection Technique for High-Resolution and High-Squint Spotlight SAR Imagery. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2017, 99, 1–13. [Google Scholar] [CrossRef]
- Peng, X.; Wang, Y.; Hong, W.; Wu, Y. Autonomous Navigation Airborne Forward-Looking SAR High Precision Imaging with Combination of Pseudo-Polar Formatting and Overlapped Sub-Aperture Algorithm. Remote Sens. 2013, 11, 6063–6078. [Google Scholar] [CrossRef]
- Zhang, L.; Sheng, J.; Xing, M.; Qiao, Z.-J.; Wu, Y.; Bao, Z. Wavenumber-Domain Autofocusing for Highly Squinted UAV SAR Imagery. IEEE Sensors J. 2011, 5, 1574–1588. [Google Scholar] [CrossRef]
- Xing, M.; Wu, Y.; Zhang, Y.; Sun, G.C.; Bao, Z. Azimuth Resampling Processing for Highly Squinted Synthetic Aperture Radar Imaging With Several Modes. IEEE Trans. Geosci. Remote Sens. 2014, 7, 4339–4352. [Google Scholar] [CrossRef]
- Sun, G.; Jiang, X.; Xing, M.; Qiao, Z.-J.; Wu, Y.; Bao, Z. Focus Improvement of Highly Squinted Data Based on Azimuth Nonlinear Scaling. IEEE Trans. Geosci. Remote Sens. 2011, 6, 2308–2322. [Google Scholar] [CrossRef]
- Wu, J.; Xu, Y.; Zhong, X.; Yang, J.M. A Three-Dimensional Localization Method for Multistatic SAR Based on Numerical Range-Doppler Algorithm and Entropy Minimization. Remote Sens. 2017, 9, 470. [Google Scholar] [CrossRef]
- Wang, Y.; Li, J.; Xu, F.; Yang, J. A New Nonlinear Chirp Scaling Algorithm for High-Squint High-Resolution SAR Imaging. IEEE Geosci. Remote Sens. Lett. 2017, 12, 2225–2229. [Google Scholar] [CrossRef]
- Vandewal, M.; Speck, R.; Suess, H. Efficient and precise processing for squinted spotlight SAR through a modified Stolt mapping. EURASIP J. Adv. Signal Process. 2007, 1, 1–7. [Google Scholar] [CrossRef]
- Yang, L.; Zhao, L.; Zhou, S.; Bi, G.; Yang, H. Spectrum-Oriented FFBP Algorithm in Quasi-Polar Grid for SAR Imaging on Maneuvering Platform. IEEE Geosci. Remote Sens. Lett. 2017, 5, 724–728. [Google Scholar] [CrossRef]
- Zhou, S.; Yang, L.; Zhao, L.; Bi, G. Quasi-Polar-Based FFBP Algorithm for Miniature UAV SAR Imaging Without Navigational Data. IEEE Trans. Geosci. Remote Sens. 2017, 12, 7053–7065. [Google Scholar] [CrossRef]
- Rodriguez, C.M.; Prats, G.; Keieger, G.; Moreira, A. Efficient Time-Domain Image Formation with Precise Topography Accommodation for General Bistatic SAR Configurations. IEEE Trans. Aerosp. Electron. Syst. 2011, 4, 2949–2966. [Google Scholar] [CrossRef] [Green Version]
- Ponce, O.; Prats-Iraola, P.; Pinheiro, M.; Rodriguez-Cassola, M.; Scheiber, R.; Reigber, A.; Moreira, A. Fully Polarimetric High-Resolution 3-D Imaging With Circular SAR at L-Band. IEEE Trans. Geosci. Remote Sens. 2014, 6, 3074–3090. [Google Scholar] [CrossRef]
- Ulander, L.M.H.; Hellsten, H.; Stenstrom, G. Synthetic-aperture radar processing using fast factorized back-projection. IEEE Trans. Aerosp. Electron. Syst. 2003, 3, 760–776. [Google Scholar] [CrossRef]
- Zhang, L.; Li, H.; Qiao, Z.; Xu, Z. A Fast BP Algorithm With Wavenumber Spectrum Fusion for High-Resolution Spotlight SAR Imaging. IEEE Geosci. Remote Sens. Lett. 2014, 9, 1460–1464. [Google Scholar] [CrossRef]
- Vu, V.T.; Pettersson, M.I. Nyquist sampling requirements for polar grids in bistatic time-domain algorithms. IEEE Trans. Signal Process. 2015, 2, 457–465. [Google Scholar] [CrossRef]
- Zhang, L.; Li, H.; Qiao, Z.; Xing, M.; Bao, Z. Integrating Autofocus Techniques With Fast Factorized Back-Projection for High-Resolution Spotlight SAR Imaging. IEEE Geosci. Remote Sens. Lett. 2013, 6, 1394–1398. [Google Scholar] [CrossRef]
- Yegulalp, A.F. Fast backprojection algorithm for synthetic aperture radar. In Proceedings of the 1999 IEEE Radar Conference on Radar into the Next Millennium, Waltham, MA, USA, 22 April 1999; pp. 60–65. [Google Scholar]
- Yang, L.; Xing, M.; Wang, Y.; Zhang, L.; Bao, Z. Compensation for the NsRCM and Phase Error After Polar Format Resampling for Airborne Spotlight SAR Raw Data of High Resolution. IEEE Geosci. Remote Sens. Lett. 2013, 1, 165–169. [Google Scholar] [CrossRef]
- Xu, G.; Xing, M.; Zhang, L.; Bao, Z. Robust Autofocusing Approach for Highly Squinted SAR Imagery Using the Extended Wavenumber Algorithm. IEEE Trans. Geosci. Remote Sens. 2013, 10, 5031–5046. [Google Scholar] [CrossRef]
- Zhang, L.; Li, H.; Xu, Z.; Wang, H.; Yang, L.; Bao, Z. Application of fast factorized back-projection algorithm for high-resolution highly squinted airborne SAR imaging. Sci. China 2017, 6, 1–17. [Google Scholar] [CrossRef]
- Zhang, L.; Qiao, Z.; Xing, M.; Yang, L.; Bao, Z. A Robust Motion Compensation Approach for UAV SAR Imagery. IEEE Trans. Geosci. Remote Sens. 2012, 8, 3202–3218. [Google Scholar] [CrossRef]
- Xing, M.; Jiang, X.; Wu, R.; Zhou, F.; Bao, Z. Motion compensation for UAV SAR based on raw radar data. IEEE Trans. Geosci. Remote Sens. 2009, 8, 2870–2883. [Google Scholar] [CrossRef]
- Yang, L.; Xing, M.; Zhang, L.; Sheng, J.; Bao, Z. Entropy-based motion error correction for high-resolution spotlight SAR imagery. IET Radar Sonar Navig. 2012, 7, 627–637. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | |
|---|---|
| Centroid Frequency | X-Band |
| Bandwidth | 180 MHz |
| Sampling rate | 200 MHz |
| PRF | 600 Hz |
| Reference Range | 17 km |
| Velocity | ∼132 m/s |
| Squint Angle | ∼55° |
| Range Direction | |||
|---|---|---|---|
| 3-dB width | PSLR | ISLR | |
| Scatterer 1 | 0.92 m | −27.32 dB | −23.75 dB |
| Scatterer 2 | 0.96 m | −26.48 dB | −24.63 dB |
| Azimuth direction | |||
| 3-dB width | PSLR | ISLR | |
| Scatterer 1 | 0.90 m | −15.23 dB | −13.39 dB |
| Scatterer 2 | 0.81 m | −25.02 dB | −10.62 dB |
| Range Direction | |||
|---|---|---|---|
| 3-dB width | PSLR | ISLR | |
| Scatterer 1 | 0.91 m | −30.62 dB | −27.13 dB |
| Scatterer 2 | 0.92 m | −29.11 dB | −26.04 dB |
| Azimuth direction | |||
| 3-dB width | PSLR | ISLR | |
| Scatterer 1 | 0.72 m | −24.87 dB | −21.59 dB |
| Scatterer 2 | 0.75 m | −17.75 dB | −16.32 dB |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.; Zhou, S.; Zhao, L.; Xing, M. Coherent Auto-Calibration of APE and NsRCM under Fast Back-Projection Image Formation for Airborne SAR Imaging in Highly-Squint Angle. Remote Sens. 2018, 10, 321. https://doi.org/10.3390/rs10020321
Yang L, Zhou S, Zhao L, Xing M. Coherent Auto-Calibration of APE and NsRCM under Fast Back-Projection Image Formation for Airborne SAR Imaging in Highly-Squint Angle. Remote Sensing. 2018; 10(2):321. https://doi.org/10.3390/rs10020321
Chicago/Turabian StyleYang, Lei, Song Zhou, Lifan Zhao, and Mengdao Xing. 2018. "Coherent Auto-Calibration of APE and NsRCM under Fast Back-Projection Image Formation for Airborne SAR Imaging in Highly-Squint Angle" Remote Sensing 10, no. 2: 321. https://doi.org/10.3390/rs10020321
APA StyleYang, L., Zhou, S., Zhao, L., & Xing, M. (2018). Coherent Auto-Calibration of APE and NsRCM under Fast Back-Projection Image Formation for Airborne SAR Imaging in Highly-Squint Angle. Remote Sensing, 10(2), 321. https://doi.org/10.3390/rs10020321