An Observation Task Chain Representation Model for Disaster Process-Oriented Remote Sensing Satellite Sensor Planning: A Flood Water Monitoring Application


Abstract
:
1. Introduction
1.1. Sensor Planning in Disaster Monitoring
1.2. Disaster Observation Task Modeling
1.3. Our Consideration
- (1)
- Covering the information demands of the OTChain and its processes. Providing observation information for an incomplete observation scene or a segmented observation window is far from sufficient. The full life cycle of a disaster can only be understood with a dynamic-supported observation information description and process-oriented observation task decomposition support, both of which can also facilitate the effective implementation of disaster preparation and response initiatives. Therefore, the fine-grained and dynamic observation demands as well as the observation interconnection among multiple tasks must be considered in the OTChain representation model.
- (2)
- Supporting sensor observation planning. Finding out which sensors or sensor combinations can be used for disaster monitoring is important. Furthermore, knowledge regarding the observation mode for a certain measurement parameter and when to start the observation tasks is even more important. Therefore, the proposed OTChain representation model must be used as an information model for sensor observation planning.
2. OTChain Representation Model
2.1. Basic Representation Requirements
- Constraints: Identifying the constraints of the observation task and the corresponding geo-environments to help sensor planners determine the usefulness of sensors;
- Interconnections: Defining the correlations among different atom observation tasks to form an observation task group with the associated relations;
- Formalization: Supporting machine-to-machine interfaces to facilitate standard exchanges in the unified OTChain description framework;
- Extensibility: Allowing an extension to satisfy the high requirements of individual communities because an appropriate representation is always purpose-dependent.
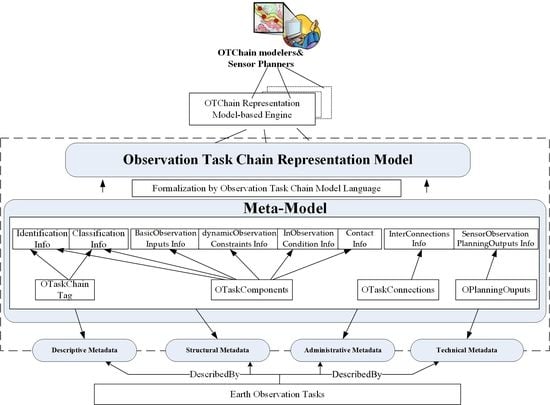
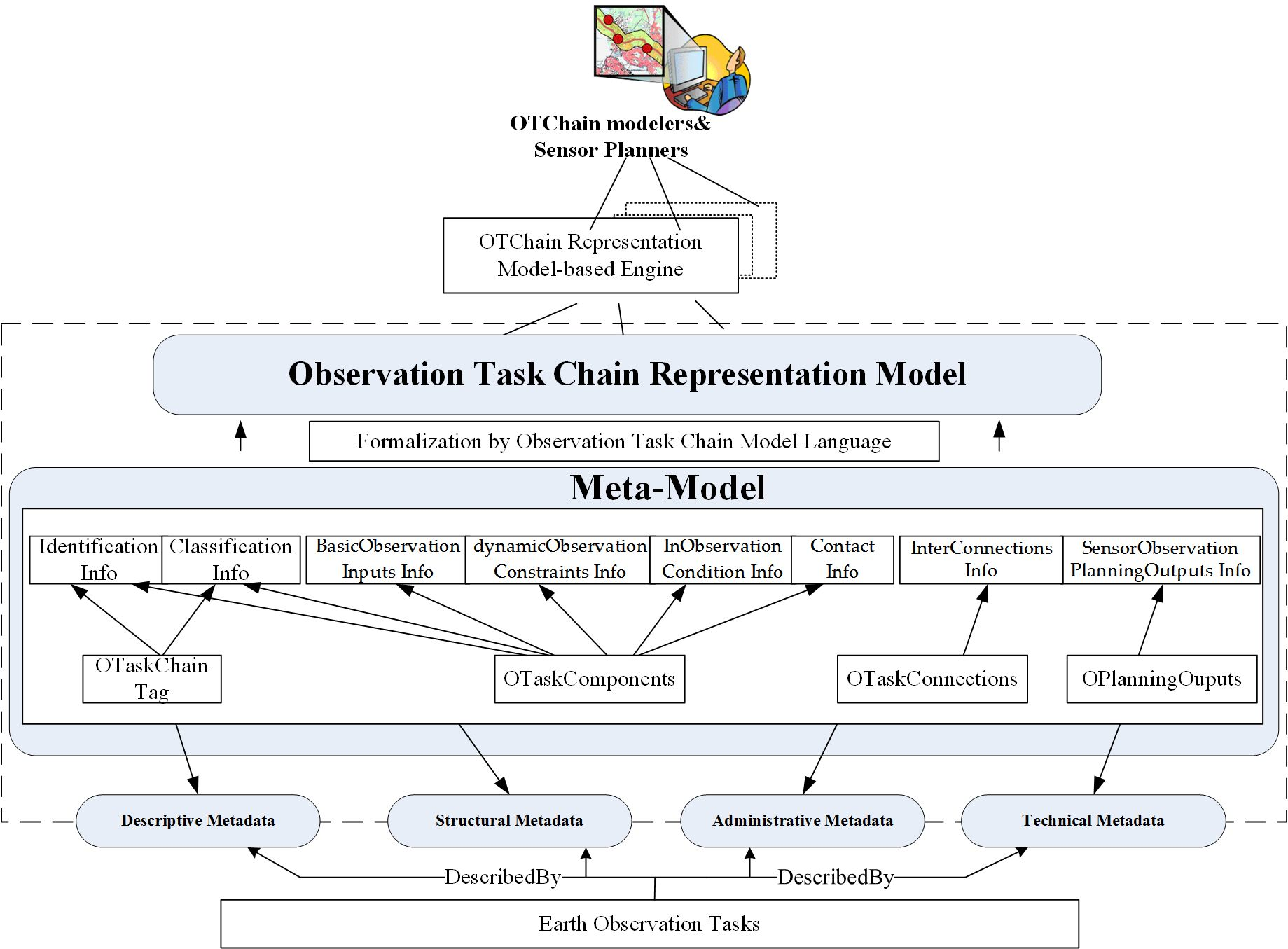
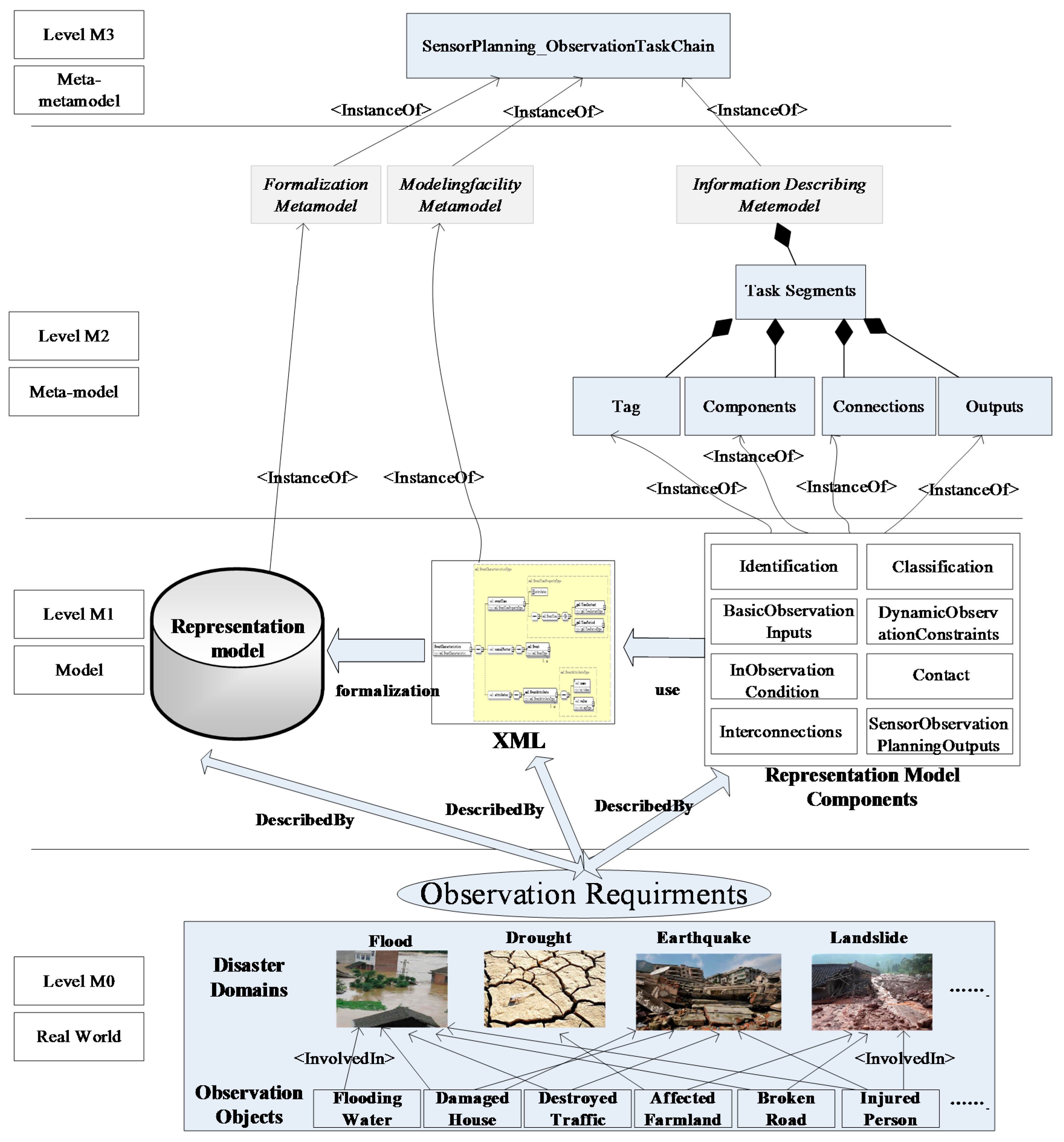
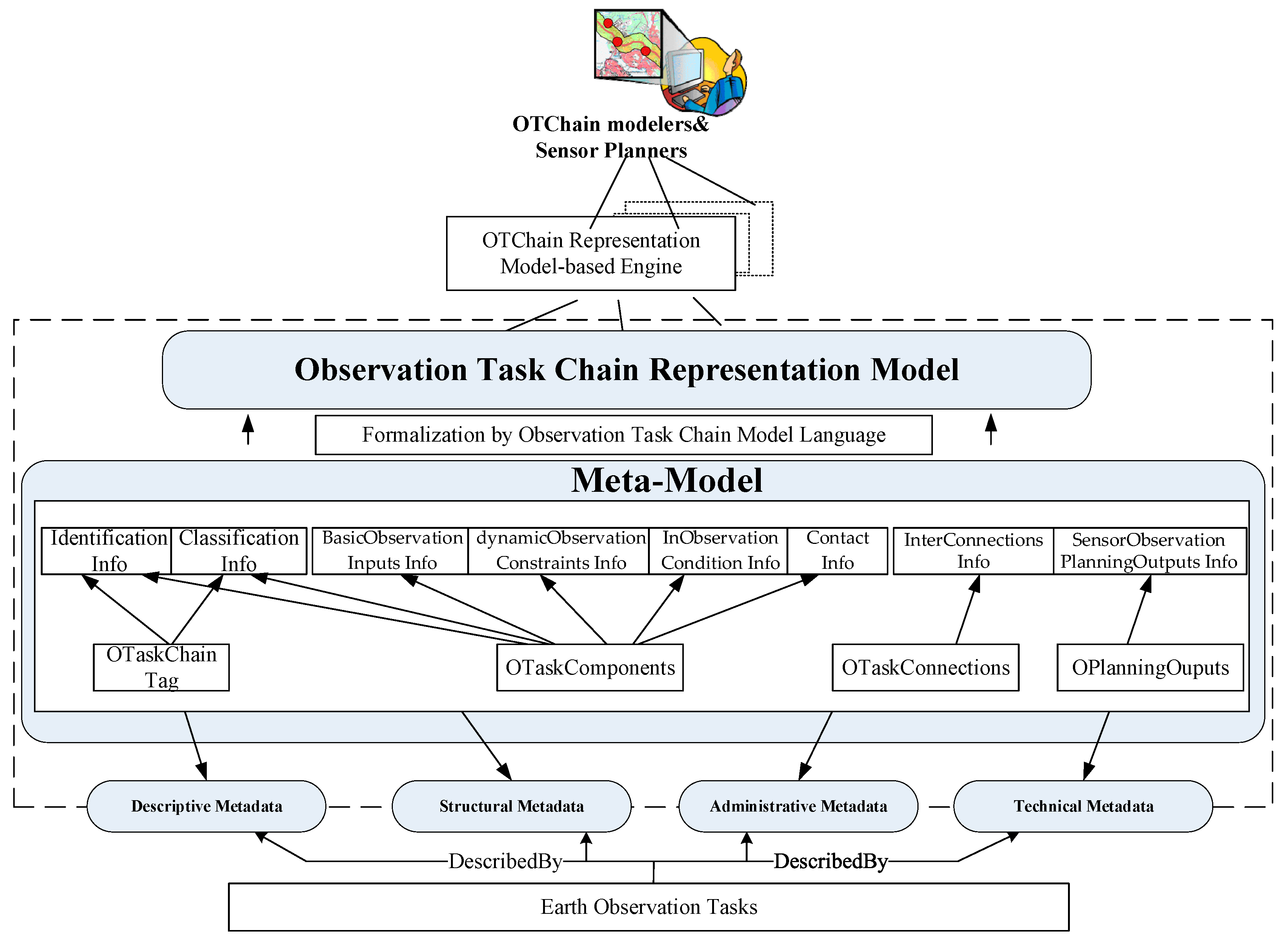
2.2. OTChain Meta-Modeling Framework
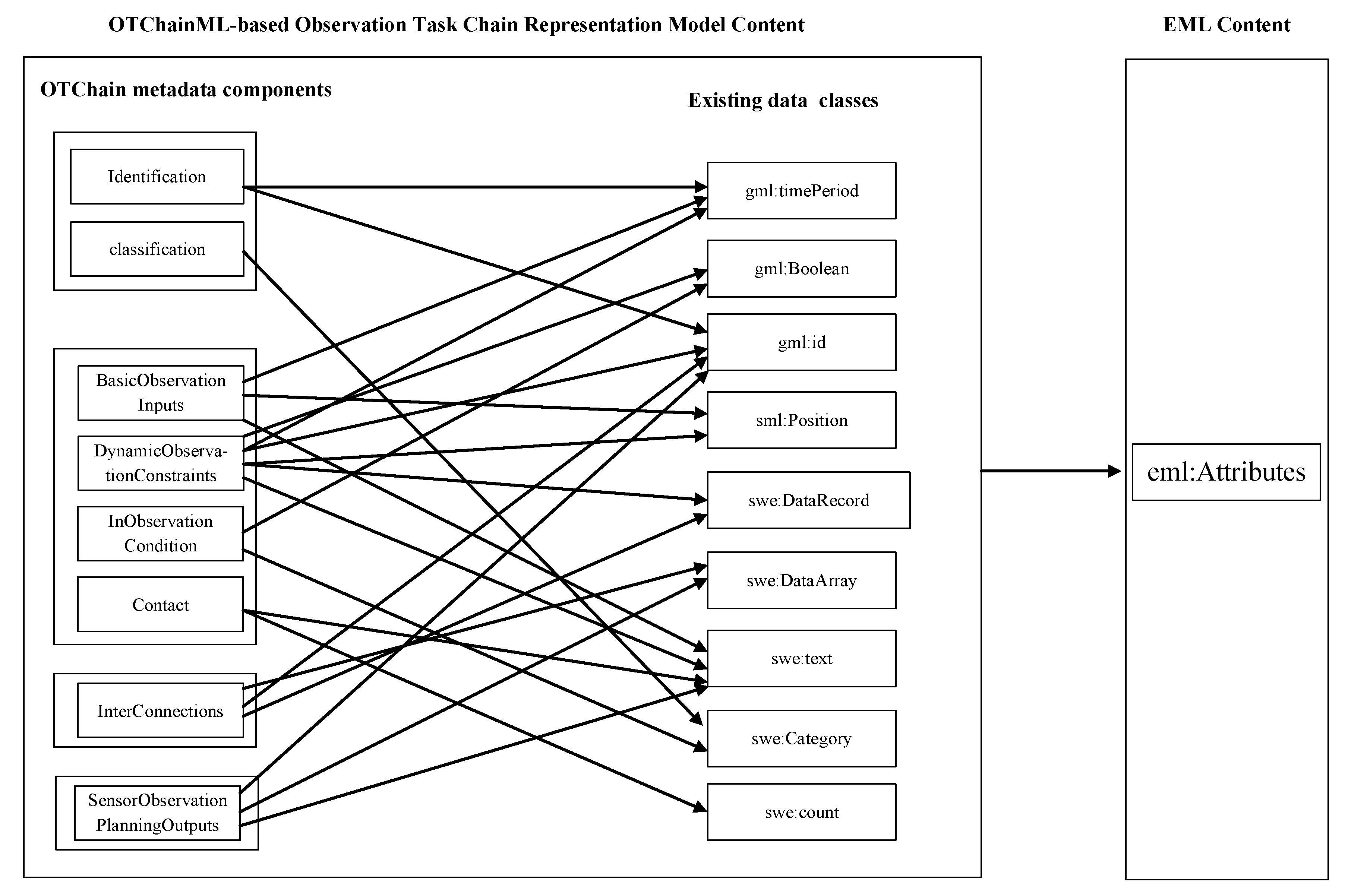
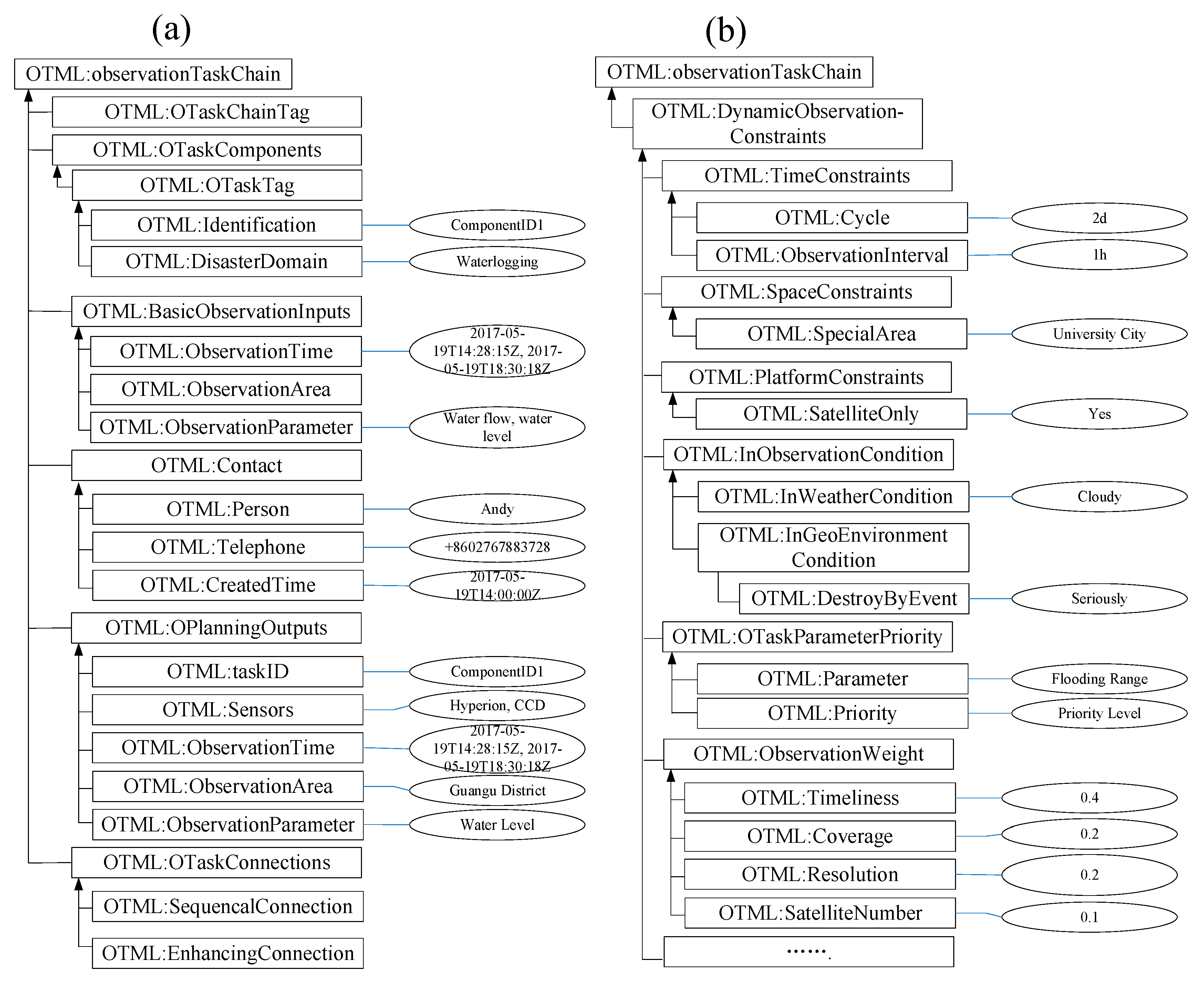
2.3. Contents of the OTChain Representation Model
- (1)
- Identification, which includes the observation task name, ID, and description.
- (2)
- Classification, which includes the disaster domains of the described observation tasks (i.e., typhoons, floods, earthquakes, and droughts) and their involved observation objects (i.e., flooding, damaged house, destroyed traffic, affected farmland, and broken road).
- (3)
- BasicObservationInputs, which includes the basic observation requirements in the time, space, and theme dimensions that describe the essential observation information of an observation task.
- (4)
- DynamicObservationConstraints, which includes advanced and personalized observational constraints, such as observation cycle and interval, key observation area, specified platform, observation priority, and observation weight. These constraints are used to further describe the time, space, and theme of the observation task, thus forming a complex observation task with dynamic observation constraints.
- (5)
- InObservationCondition, which includes the weather condition and the geographical environment damage level at the time when the observation task is dispatched.
- (6)
- Contact, which includes the name and telephone number of the person who creates the observation task as well as the time of its creation.
- (7)
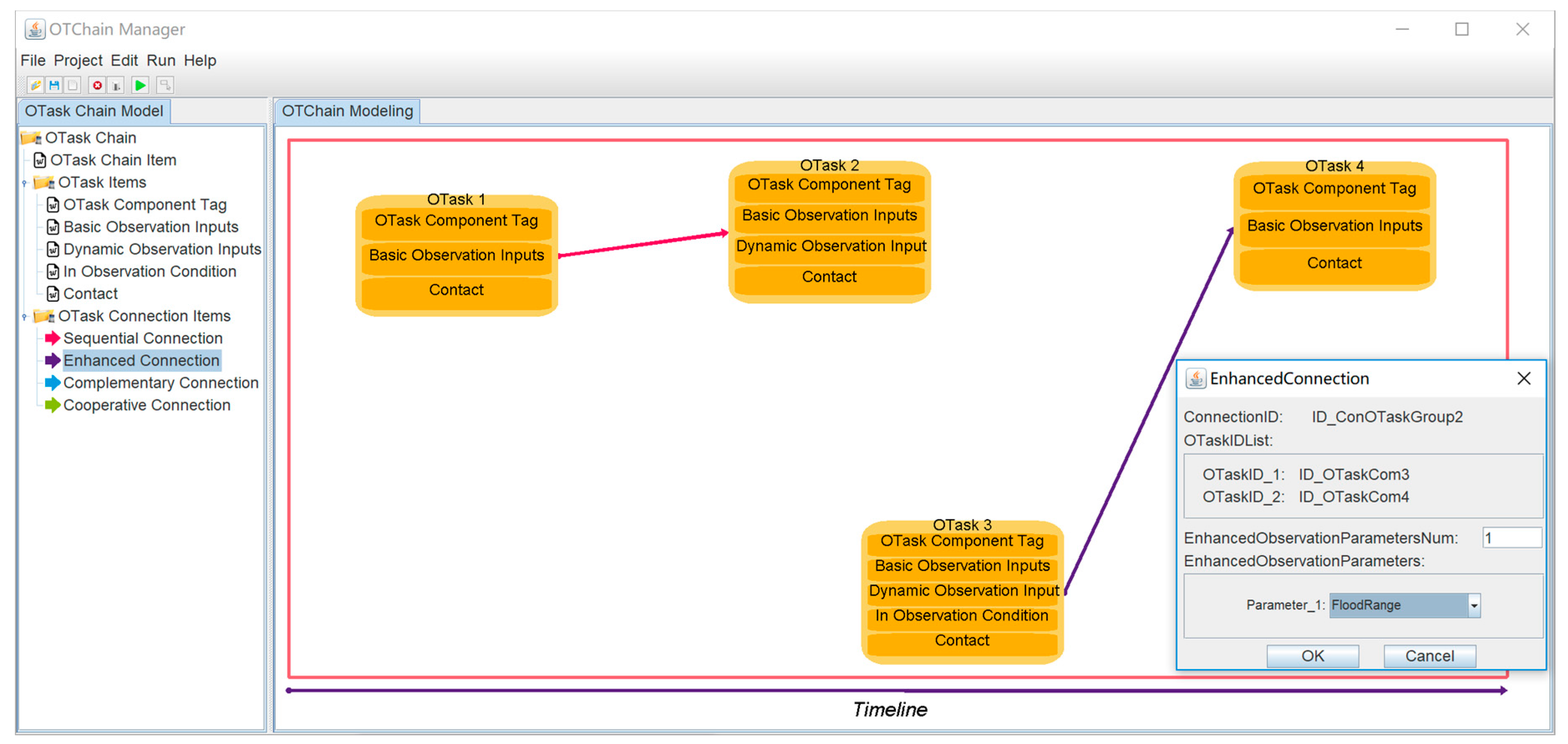
- InterConnections, which includes sequential, complementary, enhanced, and cooperative connections. A sequential connection describes the observation parameters of two observation tasks that are observed in a time sequence. A complementary connection describes two or more observation tasks that complement each other in either the time or space dimension to extensively reflect another observation scene. An enhanced connection describes two or more observation tasks in the same observation area that can be grouped together to create an environment parameter with a time-intensive observation. A cooperative connection describes two or more observation tasks in the same observation area and in a similar observation time that can be grouped together to reflect a comprehensive observation topic. These interconnections can express the association among sub-observation tasks.
- (8)
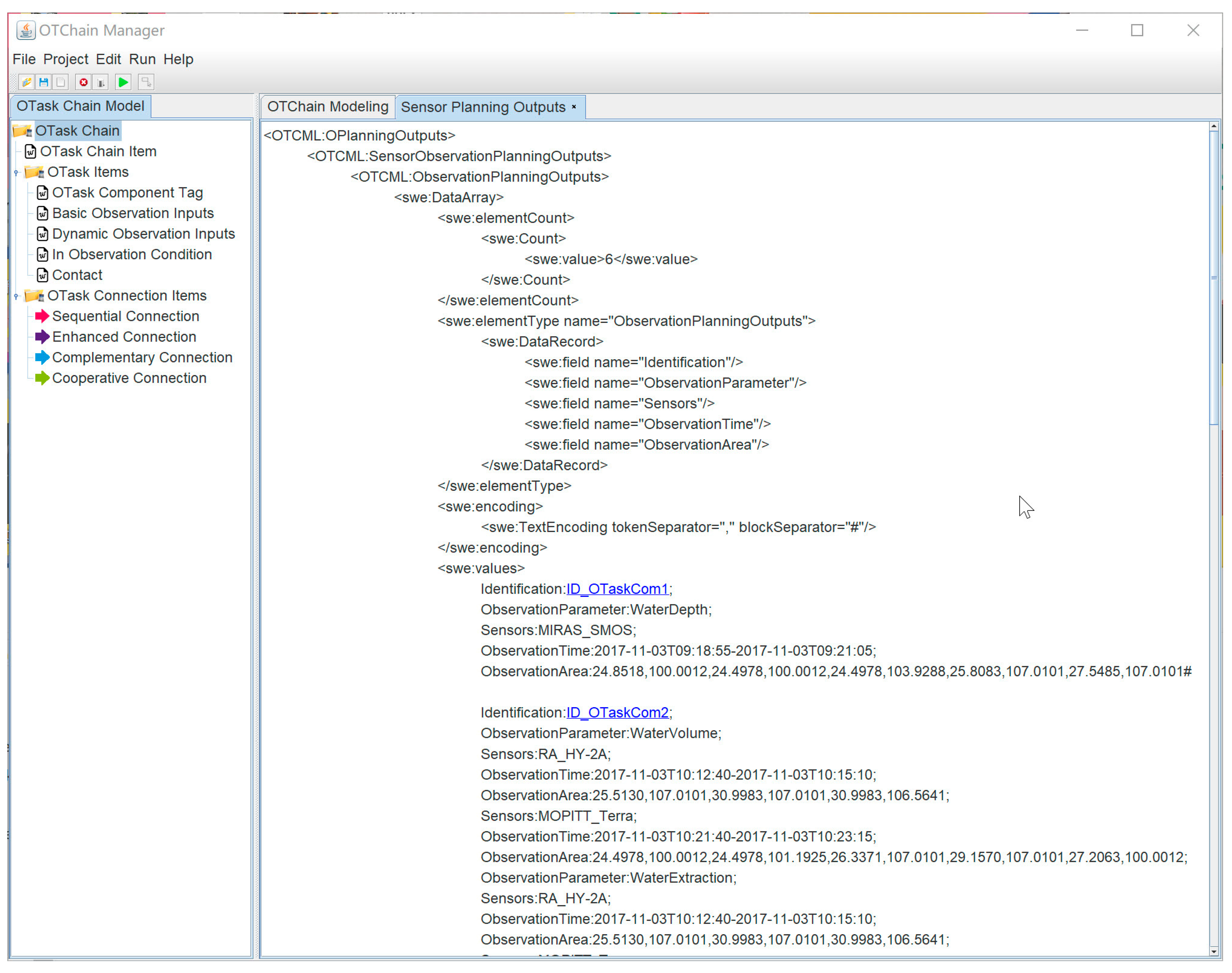
- SensorObservationPlanningOutputs, which includes the sensor observation planning solutions for each sub-observation task component, interconnected observation task group, and observation task set with priority. These solutions help sensor planners or OTChain modelers generate sensor selection programs by answering the questions “What group of sensors?” and “Which sensor with what mode is to be combined with other sensors for what measurement parameters, and when do they start?”
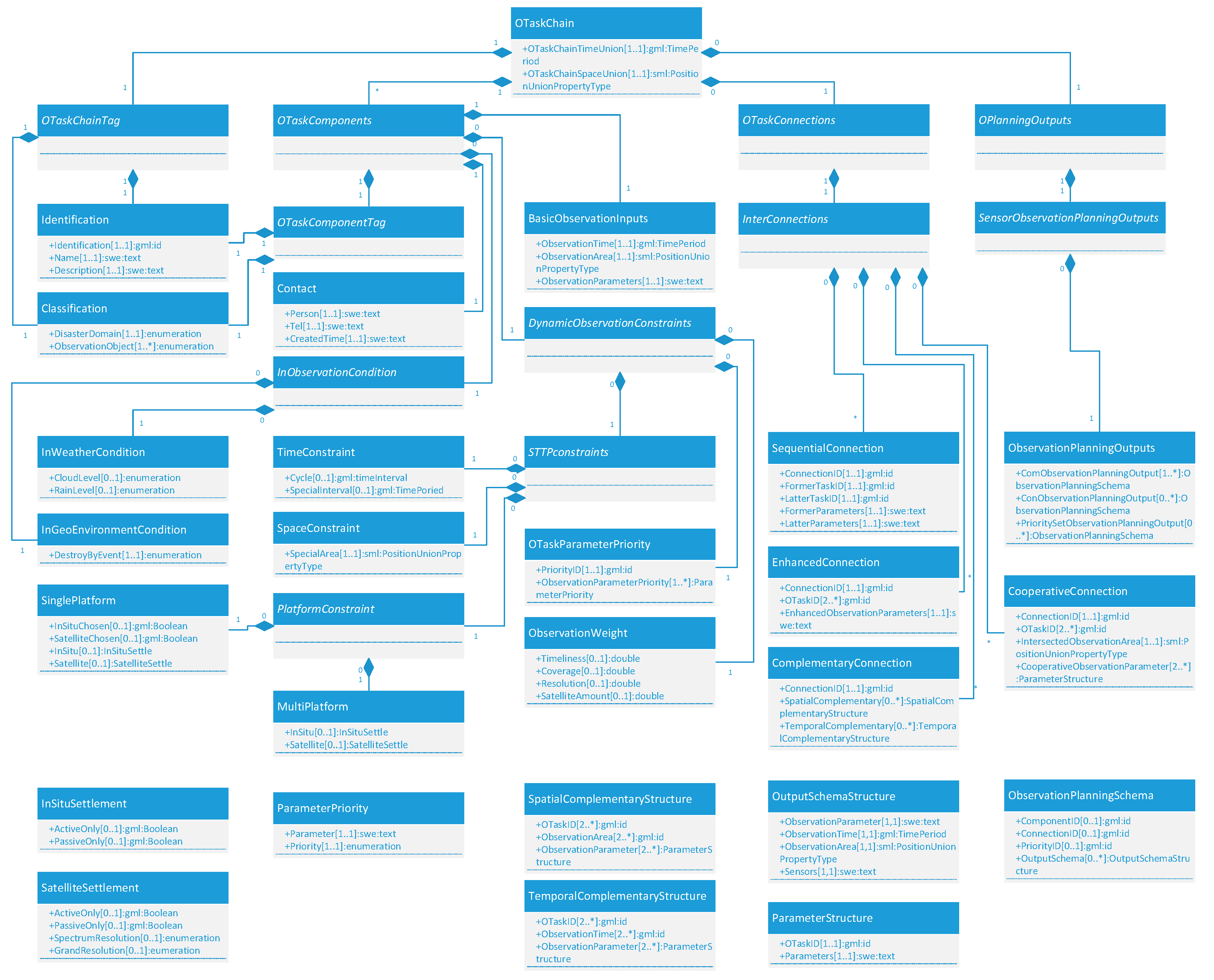
2.4. Formalization of the OTChain Representation Model
3. Experiment
3.1. Hydrological Analysis of Flood Remote-Sensing Observations in Jingsha River Basin
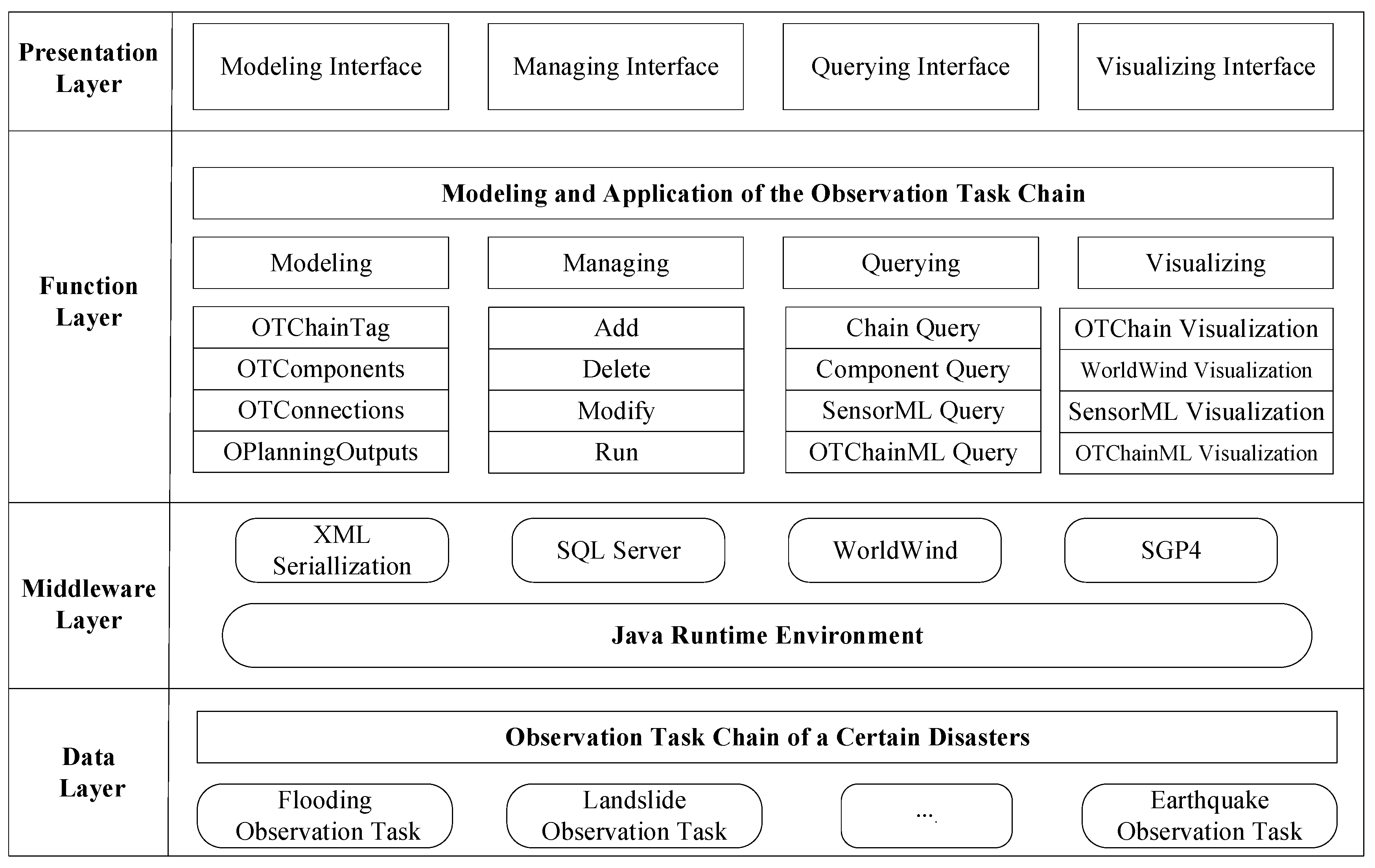
3.2. OTChain Manager for the Experiment
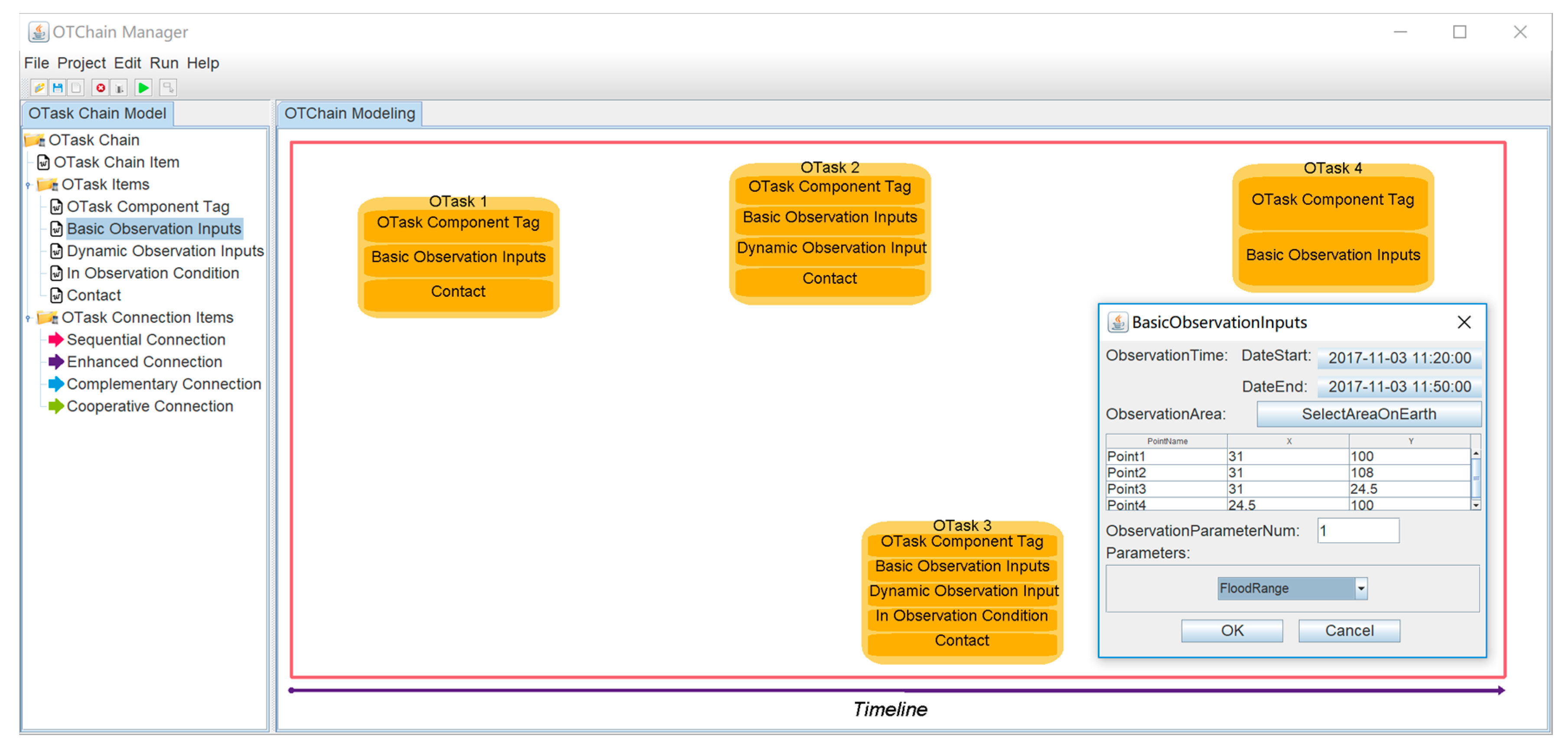
3.3. Flood Water Monitoring OTChain Modeling
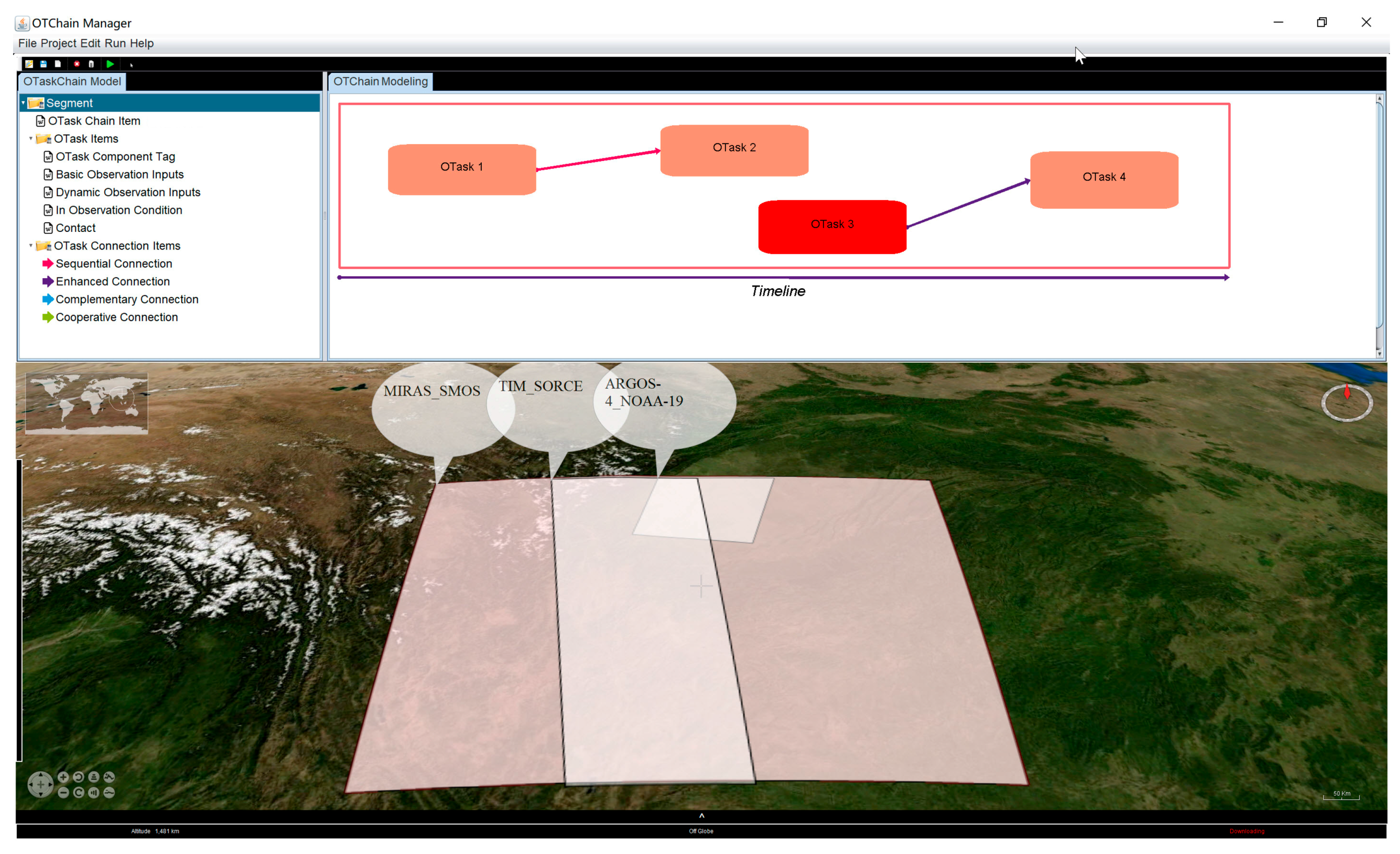
3.4. Flood Remote-Sensing Sensor Planning and Visualization
4. Discussion
4.1. Versatility and Extensibility of OTChain
4.2. Global Sensor Planning Support for Process-Owned Flood Disasters
4.3. Comparison with Other Models for Observation Task Information Management
5. Conclusions and Future Works
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Global Disaster Events Statistics in 2016. Available online: http://www.swissre.com/media/news_releases/nr20170328_sigma_2_2017.html (accessed on 31 January 2018).
- Behling, R.; Roessner, S. Multi-sensor time-series analysis for disaster management—Rapid assessment, monitoring, and long-term process understanding of landslides. In Proceedings of the MultiTemp 2017, Bruges, Belgium, 27–29 June 2017. [Google Scholar]
- Li, D.; Wang, M.; Dong, Z.; Shen, X.; Shi, L. Earth observation brain (eob): An intelligent earth observation system. Geo-Spat. Inf. Sci. 2017, 20, 134–140. [Google Scholar] [CrossRef]
- Marin-Perez, R.; García-Pintado, J.; Gómez, A.S. A real-time measurement system for long-life flood monitoring and warning applications. Sensors 2012, 12, 4213–4236. [Google Scholar] [CrossRef] [PubMed]
- Kussul, N.; Skakun, S.; Shelestov, A.Y.; Kussul, O.; Yailymov, B. Resilience Aspects in the Sensor Web Infrastructure for Natural Disaster Monitoring and Risk Assessment Based on Earth Observation Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3826–3832. [Google Scholar] [CrossRef]
- Aitsi-Selmi, A.; Egawa, S.; Sasaki, H.; Wannous, C.; Murray, V. The sendai framework for disaster risk reduction: Renewing the global commitment to people’s resilience, health, and well-being. Int. J. Disaster Risk Sci. 2015, 6, 164–176. [Google Scholar] [CrossRef]
- UCS Satellite Database in 2017. Available online: https://www.ucsusa.org/nuclear-weapons/space-weapons/satellite-database#.WnE-j3mQyYp (accessed on 31 January 2018).
- Huang, C.Y.; Liang, S. The Open Geospatial Consortium Sensor Web PivotViewer: An innovative tool for worldwide sensor web resource discovery. Int. J. Digit. Earth 2014, 7, 761–769. [Google Scholar] [CrossRef]
- Semantic Sensor Network XG Final Report. Available online: http://www.w3.org/2005/Incubator/ ssn/XGR-ssn-20110628/ (accessed on 10 August 2017).
- Hu, C.; Guan, Q.; Li, J.; Wang, K.; Chen, N. Representing Geospatial Environment Observation Capability Information: A Case Study of Managing Flood Monitoring Sensors in the Jinsha River Basin. Sensors 2016, 16, 2144. [Google Scholar] [CrossRef] [PubMed]
- Chamam, A.; Pierre, S. On the Planning of Wireless Sensor Networks: Energy-Efficient Clustering under the Joint Routing and Coverage Constraint. IEEE Trans. Mob. Comput. 2009, 8, 1077–1086. [Google Scholar] [CrossRef]
- Diallo, O.; Rodrigues, J.J.P.C.; Sene, M.; Lioret, J. Distributed Database Management Techniques for Wireless Sensor Networks. IEEE Trans. Parallel Distrib. Syst. 2015, 26, 604–620. [Google Scholar] [CrossRef]
- Le-Phuoc, D.; Hauswirth, M. Linked Open Data in Sensor Data Mashups. In Proceedings of the 2nd International Workshop on Semantic Sensor Networks, Washington, DC, USA, 26 October 2009. [Google Scholar]
- Bröring, A.; Echterhoff, J.; Jirka, S.; Simonis, I.; Everding, T.; Stasch, C.; Liang, S.; Lemmens, R. New generation sensor web enablement. Sensors 2011, 11, 2652–2699. [Google Scholar] [CrossRef] [PubMed]
- NASA Global Change Master Directory Retrieval Portal. Available online: http://gcmd.nasa.gov/index.html (accessed on 31 January 2018).
- Committee on Earth Observation Satellites Database. Available online: http://database.eohandbook.com/database/instrumenttable.aspx (accessed on 31 January 2018).
- WMO Observing Systems Capability Analysis and Review Tool. Available online: http://www.wmo-sat.info/oscar/instruments (accessed on 31 January 2018).
- Botts, M.; Percivall, G.; Reed, C.; Davidson, J. OGC® Sensor Web Enablement: Overview and High Level Architecture; GeoSensor Networks; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- OpenGeo Sensor Web Enablement (SWE) Suite. Available online: http://boundlessgeo.com/whitepaper/opengeo-sensor-web-enablement-swe-suite/ (accessed on 10 August 2017).
- Botts, M. OGC® SensorML: Model and XML Encoding Standard; Open Geospatial Consortium: Wayland, MA, USA, 2014. [Google Scholar]
- Na, A.; Priest, M. OGC® Implementation Specification 06-009r6: OpenGIS Sensor Observation Service (SOS); Open Geospatial Consortium: Wayland, MA, USA, 2007. [Google Scholar]
- Simonis, I.; Echterhoff, J. OGC® Sensor Planning Service Implementation Standard (Version: 2.0); Open Geospatial Consortium: Wayland, MA, USA, 2011. [Google Scholar]
- Bleier, T.; Bozic, B.; Bumerl-Lexa, R.; Da Costa, A.; Costes, S.; Iosifescu, I.; Martin, O.; Frysinger, S.; Havlik, D.; Hilbring, D. SANY—An Open Service Architecture for Sensor Networks; SANY Consortium: Bath, UK, 2009. [Google Scholar]
- Kussul, N.; Dan, M.; Moe, K.; Mund, J.P.; Post, J.; Shelestov, A.; Handy, M. Interoperable infrastructure for flood monitoring: Sensorweb, grid and cloud. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 6, 1740–1745. [Google Scholar] [CrossRef] [Green Version]
- Mandl, D.; Cappelaere, P.; Frye, S.; Sohlberg, R.; Ong, L.; Chien, S.; Tran, D.; Davies, A.; Falke, S.; Kolitz, S.; et al. Sensor Web 2.0: Connecting Earth‘s Sensors via the Internet. In Proceedings of the NASA Earth Science Technology Conference 2008, Adelphi, MD, USA, 25 June 2008. [Google Scholar]
- Sun, Z.; Yue, P.; Lu, X.; Zhai, X.; Hu, L. A task ontology driven approach for live geoprocessing in a service-oriented environment. Trans. GIS 2012, 16, 867–884. [Google Scholar] [CrossRef]
- Wang, F.; Yuan, H. Challenges of the Sensor Web for disaster management. Int. J. Digit. Earth 2010, 3, 260–279. [Google Scholar] [CrossRef]
- Frye, S.; Percivall, G.; Moe, K.; Dan, M.; Handy, M.; Evans, J. Towards a sensor web architecture for Disaster management: Insights from the Namibia flood pilot. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium 2014, Quebec City, QC, Canada, 13–18 July 2014. [Google Scholar]
- Chen, N.; Du, W.; Song, F.; Chen, Z. FLCNDEMF: An Event Metamodel for Flood Process Information Management under the Sensor Web Environment. Remote Sens. 2015, 7, 7231–7256. [Google Scholar] [CrossRef]
- Jones, E.; Botterell, A. Common Alerting Protocol (Version 1.1); OASIS: Burlington, MA, USA, 2005. [Google Scholar]
- Raymond, M.; Webb, S.; Aymond, P.I. Emergency Data Exchange Language (EDXL) Distribution Element (Version 1.0); OASIS: Burlington, MA, USA, 2006. [Google Scholar]
- Aymond, P.; Brooks, R.; Grapes, T.; Ham, G.; Iannella, R.; Robinson, K.; Joerg, W.; Triglia, A. Emergency Data Exchange Language Resource Messaging (EDXL-RM) (Version 1.0); OASIS: Burlington, MA, USA, 2009. [Google Scholar]
- Iannella, R.; Robinson, K. Tsunami Warning Markup Language (TWML) (Version 1.0); National ICT Australia: Sydney, Australia, 2006.
- Sun, S.; Iannella, R.; Robinson, K. Cyclone Warning Markup Language (CWML) (Version 1.0); National ICT Australia: Sydney, Australia, 2006.
- Babaie, H.A.; Babaei, A. Developing the earthquake markup language and database with UML and XML schema. Comput. Geosci. 2005, 31, 1175–1200. [Google Scholar] [CrossRef]
- Scherp, A.; Franz, T.; Saathoff, C.; Staab, S.F. A model of events based on the foundational ontology dolce + DnS ultralight. In Proceedings of the Fifth ACM International Conference on Knowledge Capture, New York, NY, USA, 1–4 September 2009. [Google Scholar]
- Everding, T.; Echterhoff, J. Event Pattern Markup Language (EML) (Version: 0.3.0) 08-132; Open Geospatial Consortium: Wayland, MA, USA, 2008. [Google Scholar]
- Di, L.; Moe, K.; Yu, G. Metadata requirements analysis for the emerging sensor web. Int. J. Digit. Earth 2009, 2, 3–17. [Google Scholar] [CrossRef]
- Chen, N.; Hu, C. A sharable and interoperable meta-model for atmospheric satellite sensors and observations. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 1519–1530. [Google Scholar] [CrossRef]
- Hu, C.; Guan, Q.; Chen, N.; Li, J.; Zhong, X.; Han, Y. An Observation Capability Metadata Model for EO Sensor Discovery in Sensor Web Enablement Environments. Remote Sens. 2014, 6, 10546–10570. [Google Scholar] [CrossRef]
- Chen, N.; Wang, K.; Xiao, C.; Gong, J. A heterogeneous sensor web node meta-model for the management of a flood monitoring system. Environ. Model. Softw. 2014, 54, 222–237. [Google Scholar] [CrossRef]
- Garitselov, O.; Mohanty, S.P.; Kougianos, E. A comparative study of metamodels for fast and accurate simulation of nano-cmos circuits. IEEE Trans. Semicond. Manuf. 2012, 25, 26–36. [Google Scholar] [CrossRef]
- OMG’s MetaObject Facility. Available online: http://www.omg.org/mof/ (accessed on 10 August 2017).
- Atkinson, C.; Kuhne, T. Model-driven development: A metamodeling foundation. IEEE Softw. 2003, 20, 36–41. [Google Scholar] [CrossRef]
- Portele, C. OGC@ Implementation Specification: OpenGIS Geography Markup Language (GML) Encoding Standard (Version: 3.2.1) 07-036; Open Geospatial Consortium: Wayland, MA, USA, 2007. [Google Scholar]
- Robin, A. OGC@ Implementation Specification: SWE Common Data Model Encoding Standard (Version 2.0) 08-094r1; Open Geospatial Consortium: Wayland, MA, USA, 2010. [Google Scholar]
- Liu, Z.; Sun, W. Trend analysis of precipitation in the jinsha river basin in china. J. Hydrometeorol. 2013, 14, 290–303. [Google Scholar]
- Castañeda, C.; Herrero, J. The water regime of the Monegros playa-lakes as established from ground and satellite data. J. Hydrol. 2005, 310, 95–110. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Models | CAP | EDXL-DE | EDXL-RM | TWML | CWML | EarthquakeML | Event-Model-F | Task-Ontology | EML | FLCNDEM | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| OTChain Features | |||||||||||
| Dynamic observation information description | × | × | × | × | × | × | ○ | ○ | × | ○ | |
| Process-oriented observation task decomposition | × | × | × | × | × | × | × | ○ | × | ○ | |
| Observation interconnection | × | × | × | × | × | × | × | × | × | × | |
| Time-series observation planning | × | × | × | × | × | × | × | × | × | √ | |
| Observation planning provenance | × | × | × | × | × | × | × | ○ | × | ○ | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, C.; Luo, J.; Hu, C.; Tian, L.; Li, J.; Wang, K. An Observation Task Chain Representation Model for Disaster Process-Oriented Remote Sensing Satellite Sensor Planning: A Flood Water Monitoring Application. Remote Sens. 2018, 10, 375. https://doi.org/10.3390/rs10030375
Yang C, Luo J, Hu C, Tian L, Li J, Wang K. An Observation Task Chain Representation Model for Disaster Process-Oriented Remote Sensing Satellite Sensor Planning: A Flood Water Monitoring Application. Remote Sensing. 2018; 10(3):375. https://doi.org/10.3390/rs10030375
Chicago/Turabian StyleYang, Chao, Jin Luo, Chuli Hu, Lu Tian, Jie Li, and Ke Wang. 2018. "An Observation Task Chain Representation Model for Disaster Process-Oriented Remote Sensing Satellite Sensor Planning: A Flood Water Monitoring Application" Remote Sensing 10, no. 3: 375. https://doi.org/10.3390/rs10030375
APA StyleYang, C., Luo, J., Hu, C., Tian, L., Li, J., & Wang, K. (2018). An Observation Task Chain Representation Model for Disaster Process-Oriented Remote Sensing Satellite Sensor Planning: A Flood Water Monitoring Application. Remote Sensing, 10(3), 375. https://doi.org/10.3390/rs10030375