On Signal Modeling of Moon-Based Synthetic Aperture Radar (SAR) Imaging of Earth



Abstract
:
1. Introduction
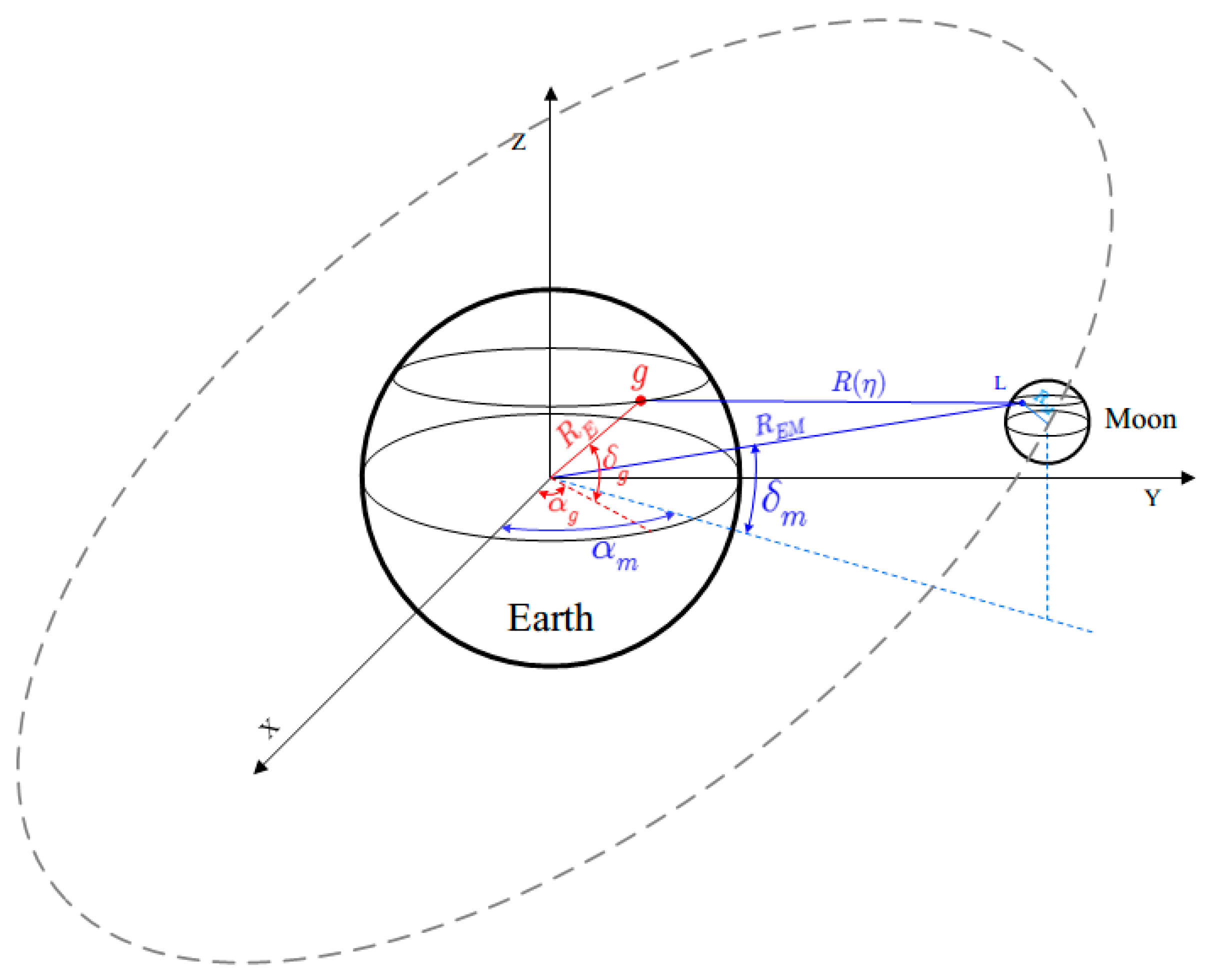
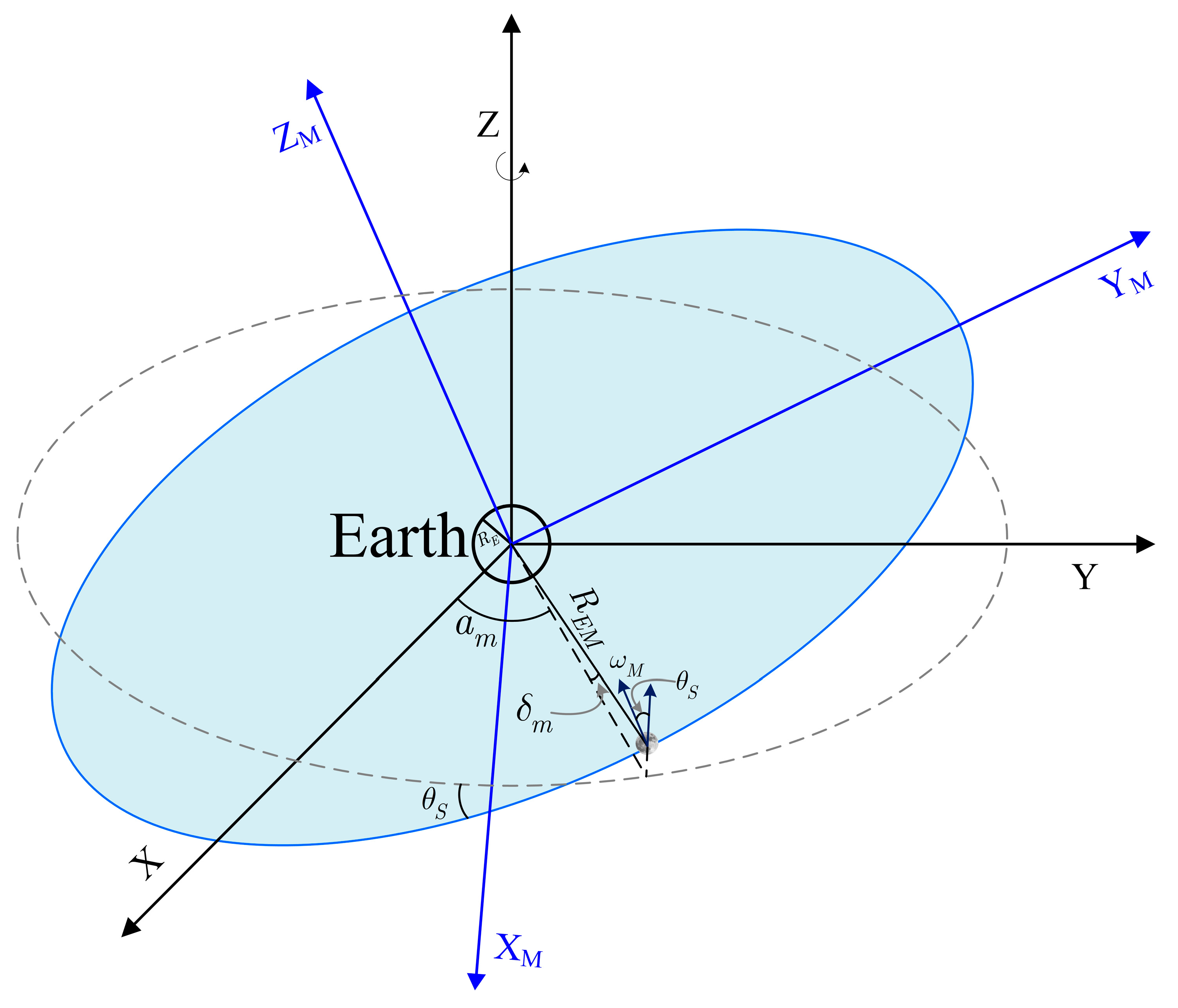
2. The Reference Coordinate System
- (a)
- a right-handed Earth-centered reference frame, which is a geocentric inertial reference frame with the x-axis from the Earth’s center to the true equinox of the date and the z-axis towards celestial North;
- (b)
- a right-handed Moon-centered reference frame, with axes of XE and ZE that are parallel to the right-handed Earth-centered reference frame;
- (c)
- a right-handed Moon-centered reference frame, with the XA axis from the Moon-center to the current center of the lunar disk and the ZA axis towards lunar north; and,
- (d)
- a right-handed Moon-centered reference frame, with the XS axis from the Moon-center to the mean center of the apparent lunar disk and the ZS axis towards the lunar North Pole.
3. The Doppler Parameters of Moon-Based SAR
3.1. Doppler Parameters for a Stationary Moon-Based SAR
3.2. Doppler Parameters for a Motional Moon-Based SAR
3.3. Doppler Parameters for a Motional Moon-Based SAR
4. Imaging Properties of Moon-Based SAR
4.1. Moon-Based SAR Signal Model
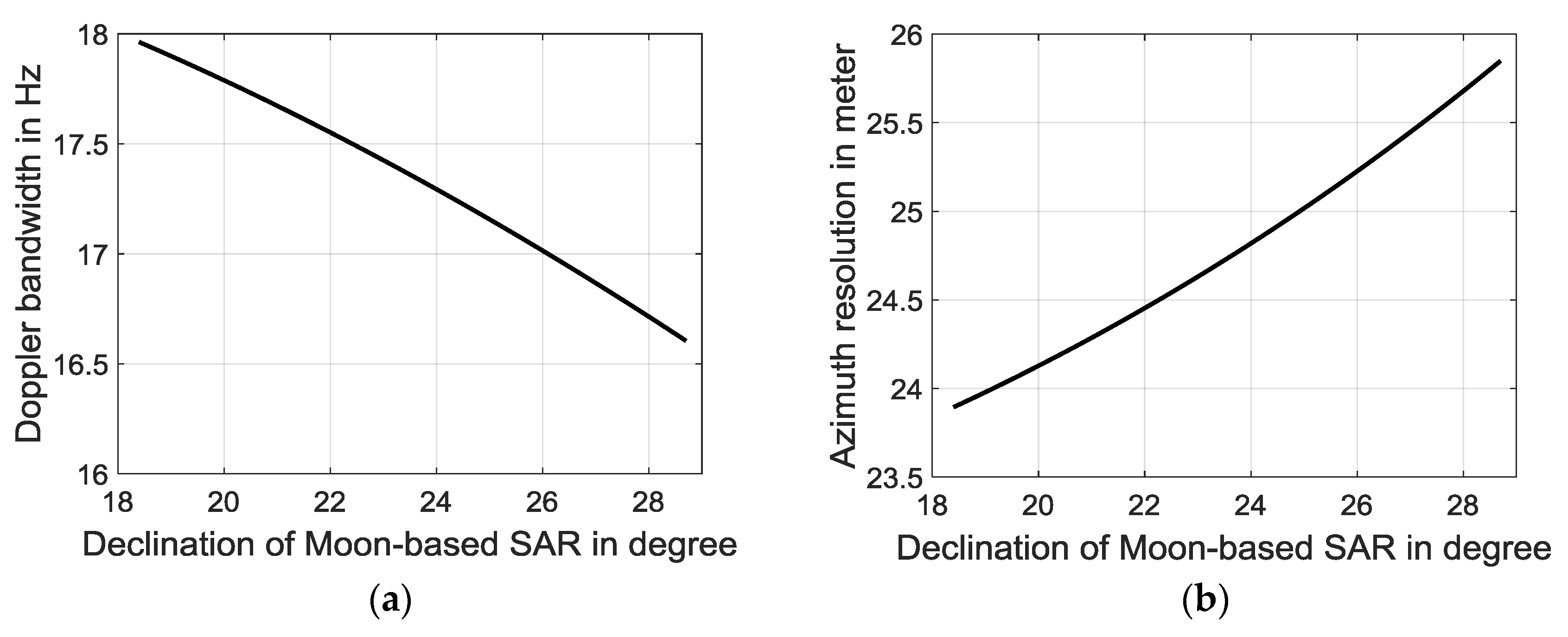
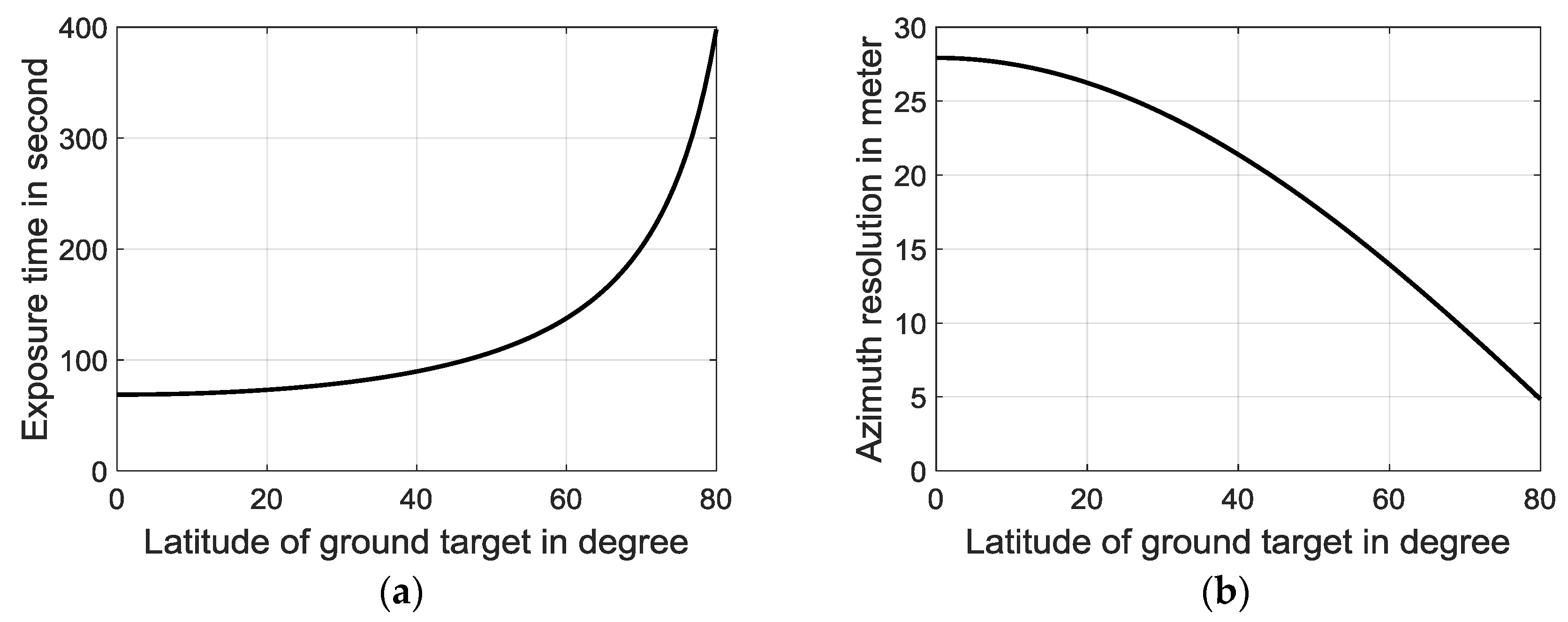
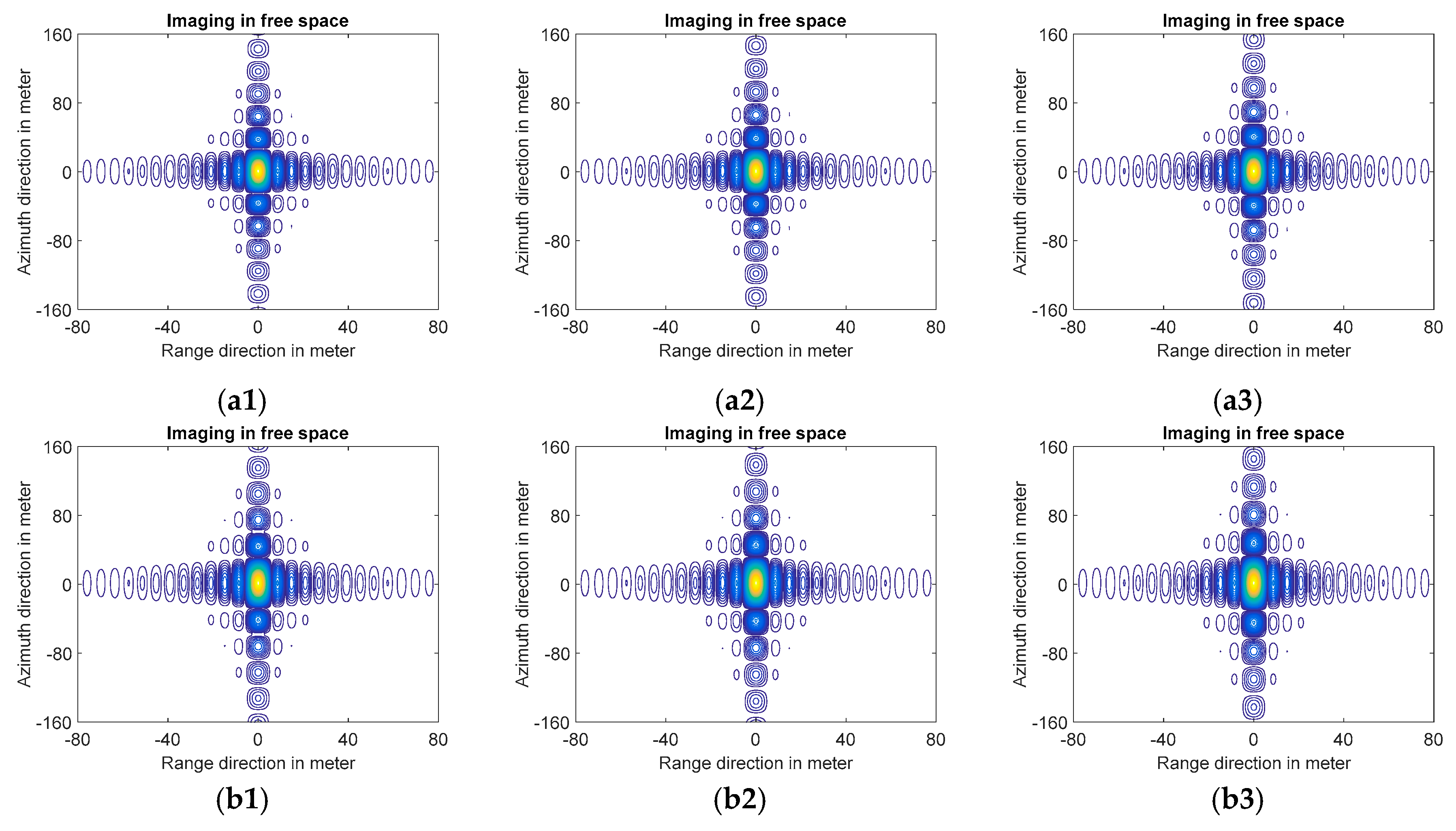
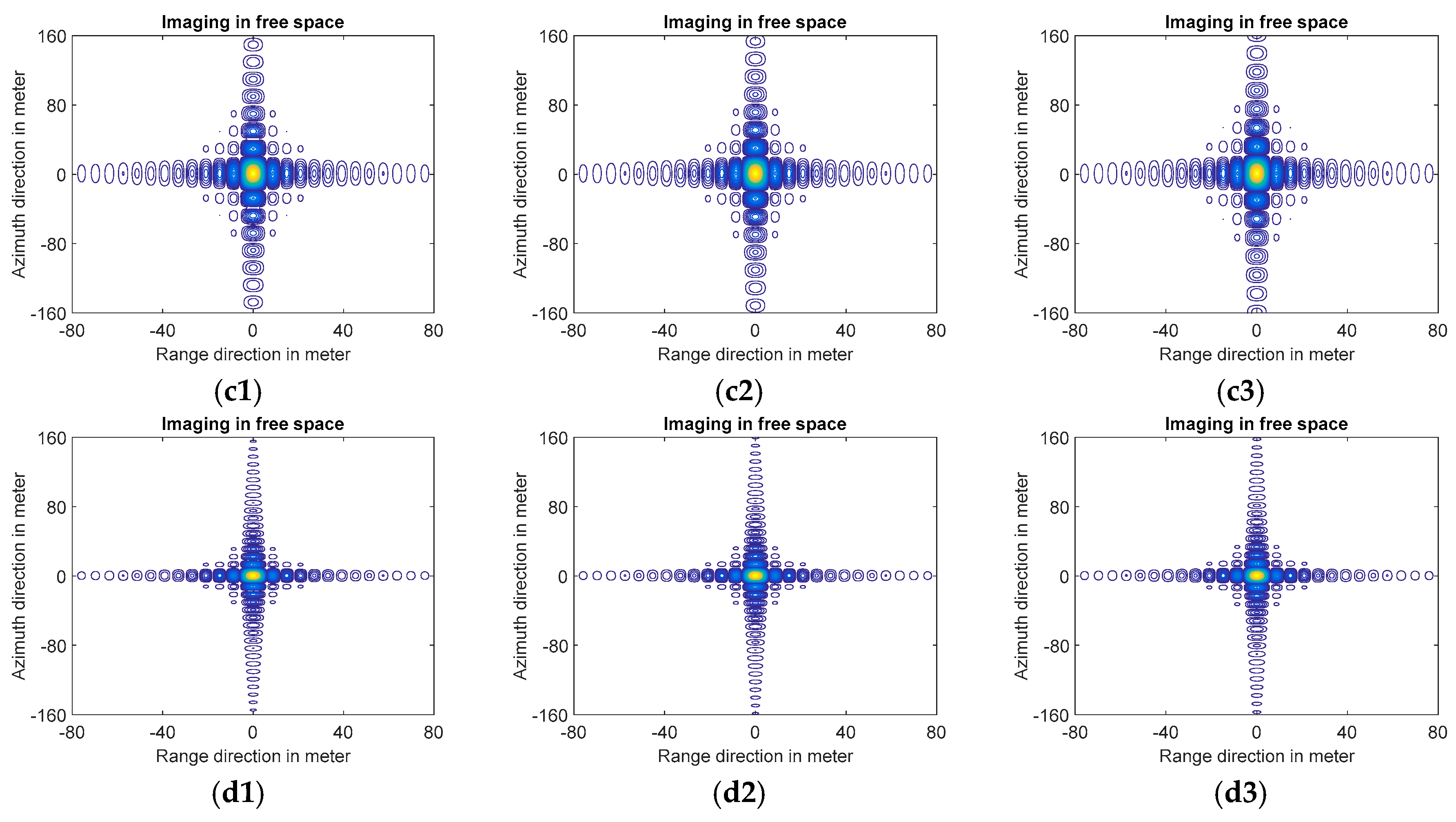
4.2. Properties of Moon-Based SAR Imaging
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
Appendix B
References
- Campbell, J.B.; Wynne, R.H. Introduction to Remote Sensing; Guilford Press: New York, NY, USA, 2011. [Google Scholar]
- Johnson, J.; Lucey, P.; Stone, T.; Staid, M. Visible/Near-Infrared Remote Sensing of Earth from the Moon. NASA Advisory Council Workshop on Science Associated with the Lunar Exploration Architecture White Papers; 2007. Available online: http://www.lpi.usra.edu/meetings/LEA/whitepapers/Johnson_etal_v02.pdf (accessed on 19 July 2017).
- Renga, A. Configurations and Performance of Moon-based SAR Systems for very high resolution Earth remote sensing. In Proceedings of the AIAA Pegasus Aerospace Conference, Naples, Italy, 12–13 April 2007. [Google Scholar]
- Renga, A.; Moccia, A. Preliminary analysis of a Moon-based Interferometric SAR system for very high resolution Earth remote sensing. In Proceedings of the 9th ILEWG International Conference on Exploration and Utilisation of the Moon, Sorrento, Italy, 22–26 October 2007. [Google Scholar]
- Moccia, A.; Renga, A. Synthetic aperture radar for earth observation from a lunar base: Performance and potential applications. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1034–1051. [Google Scholar] [CrossRef]
- Fornaro, G.; Franceschetti, G.; Lombardini, F.; Mori, A.; Calamia, M. Potentials and limitations of moon-borne sar imaging. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3009–3019. [Google Scholar] [CrossRef]
- Purkis, S.J.; Klemas, V.V. Remote Sensing and Global Environmental Change; John Wiley & Sons: Chichester, West Sussex, UK, 2011. [Google Scholar]
- Chen, K.-S. Principles of Synthetic Aperture Radar Imaging: A System Simulation Approach; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Guo, H.D.; Ding, Y.X.; Liu, G.; Zhang, D.W.; FU, W.X.; Zhang, L. Conceptual study of lunar-based sar for global change monitoring. Sci. China Earth Sci. 2014, 57, 1771–1779. [Google Scholar] [CrossRef]
- Ding, Y. Moonborne Earth Observation Synthetic Aperture Radar and Its Application in Global Change. Ph.D. Thesis, Signal and Information Processing, University of Chinese Academy of Sciences, Beijing, China, 2014. [Google Scholar]
- Ren, Y.; Guo, H.; Liu, G.; Ye, H. Simulation study of geometric characteristics and coverage for moon-based earth observation in the electro-optical region. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2431–2440. [Google Scholar] [CrossRef]
- Guo, H.D.; Liu, G.; Ding, Y.X. Moon-based earth observation: Scientific concept and potential applications. Int. J. Digit. Earth 2017, 1–12. [Google Scholar] [CrossRef]
- Ouyang, Z.Y. Introduction to Lunar Science; China Astron Publ House: Beijing, China, 2005. [Google Scholar]
- Standish, E. Jpl Planetary and Lunar Ephemerides: De 405/le 405, Jet Propulsion Laboratory Interoffice Memorandum, IOM 312. F-98-048. August 1998. Available online: http://iau-comm4.jpl.nasa.gov/de405iom/de405iom.pdf (accessed on 23 September 2017).
- Meeus, J. Explanatory supplement to the astronomical ephemeris. Ciel et Terre 1962, 78, 376. [Google Scholar]
- Jia, Y.Z.; Zhou, Y.L. Research on lunar site selection for lunar based earth observation. Spacecr. Eng. 2016, 25, 116–121. [Google Scholar]
- Goldreich, P. History of the lunar orbit. Rev. Geophys. 1966, 4, 411–439. [Google Scholar] [CrossRef]
- Renga, A.; Moccia, A. Moon-based synthetic aperture radar: Review and challenges. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Beijing, China, 10–15 July 2016; pp. 3708–3711. [Google Scholar]
- Cumming, I.G.; Wong, F.H. Digital Signal Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Artech House: Boston, MA, USA, 2004. [Google Scholar]
- Skolnik, M. Radar Handbook, 2nd ed.; McGraaw-Hill Book Company: New York, NY, USA, 1990. [Google Scholar]
- Ulaby, F.T.; Long, D.G.; Blackwell, W.J.; Elachi, C.; Fung, A.K.; Ruf, C.; Sarabandi, K.; Zebker, H.A.; Van Zyl, J. Microwave Radar and Radiometric Remote Sensing; University of Michigan Press: Ann Arbor, MI, USA, 2014. [Google Scholar]
- Xi, X.N.; Zeng, G.Q.; Ren, X. Orbit Design of Lunar Probe; National Defence Industry Press: Changsha, China, 2001. [Google Scholar]
- Curlander, J.C.; Mcdonough, R.N. Synthetic Aperture Radar: Systems and Signal Processing; John Wiley & Sons: New York, NY, USA, 1991. [Google Scholar]
- Hu, C.; Long, T.; Zeng, T.; Liu, F.; Liu, Z. The accurate focusing and resolution analysis method in geosynchronous sar. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3548–3563. [Google Scholar] [CrossRef]
- Neo, Y.L.; Wong, F.; Cumming, I.G. A two-dimensional spectrum for bistatic SAR processing using series reversion. IEEE Geosci. Remote Sens. Lett. 2007, 4, 93–96. [Google Scholar] [CrossRef]
- Key, E.L.; Fowle, E.N.; Haggarty, R.D. A method of designing signals of large time-bandwidth product. IRE Int. Conv. Rec. 1961, 4, 146–155. [Google Scholar]
- Wu, C.; Liu, K.Y.; Jin, M. Modeling and a correlation algorithm for spaceborne SAR signals. IEEE Trans. Aerosp. Electron. Syst. 1982, AES-18, 563–575. [Google Scholar] [CrossRef]
- Ishimaru, A.; Kuga, Y.; Liu, J.; Kim, Y.; Freeman, T. Ionospheric effects on SAR at 100 MHz to 2 GHz. Radio Sci. 1999, 34, 257–268. [Google Scholar] [CrossRef]
- Xu, Z.; Wu, J.; Wu, Z. A survey of ionospheric effects on space-based radar. Waves Random Media 2004, 14, S189–S273. [Google Scholar] [CrossRef]
- Quegan, S.; Lamont, J. Ionospheric and tropospheric effects on synthetic aperture radar performance. Int. J. Remote Sens. 1986, 7, 525–539. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Quantity | Unit |
|---|---|---|---|
| Latitude of ground target | 22.5 | degree | |
| Declination of Moon-Based SAR | 24.5 | degree | |
| Inclination of lunar orbit to the equator of the Earth | 28.6 | degree | |
| Earth radius | 6371 | km | |
| Distance between the Earth and the Moon-Based SAR | 389,408 | km | |
| Earth’s rotation angular velocity | 7.292 × 10−5 | rad/s | |
| Lunar revolution angular velocity | 2.662 × 10−6 | rad/s | |
| Carrier frequency | 1.2 | GHz | |
| System bandwidth | 50 | MHz |
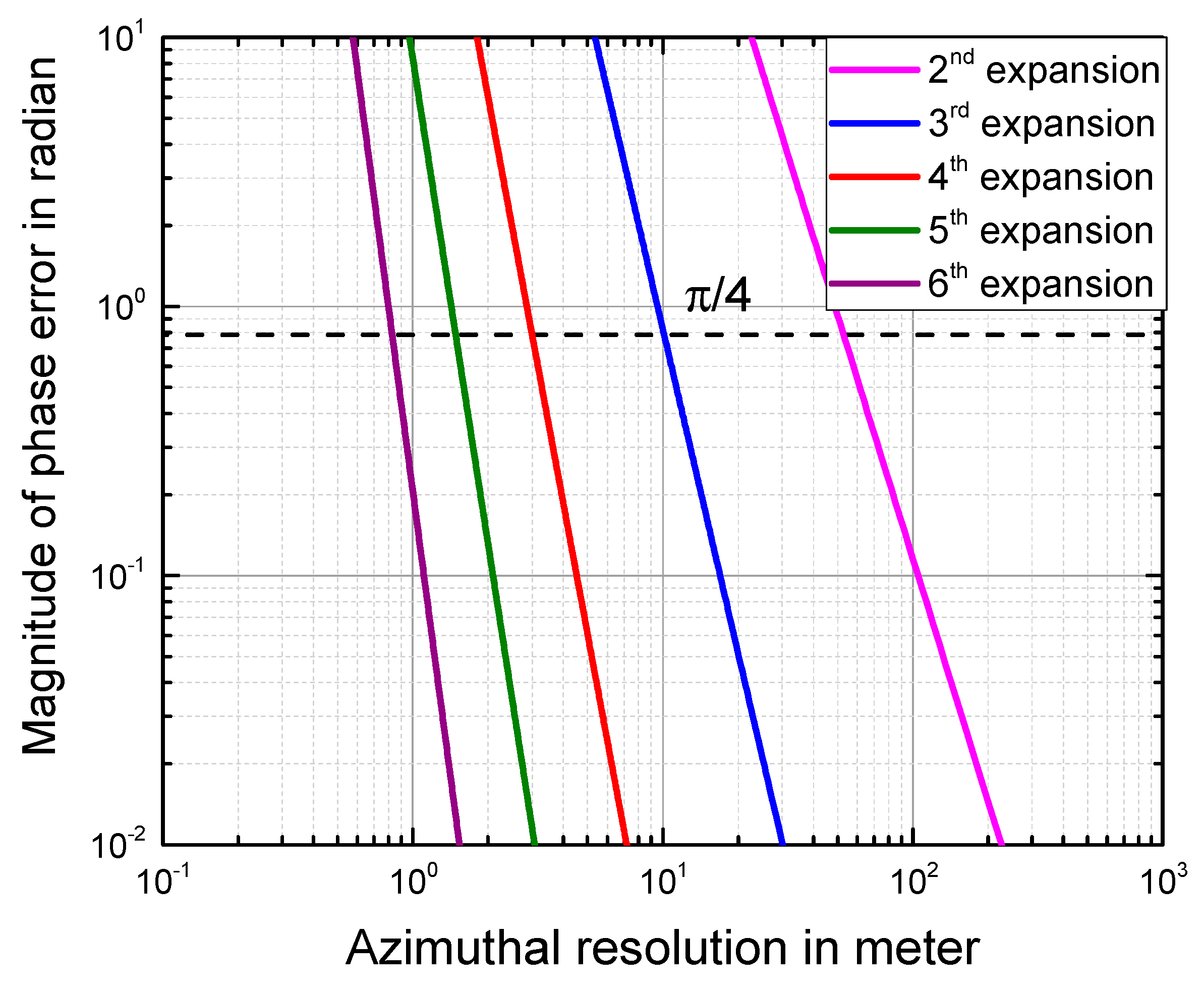
| Expansion Order | Azimuthal Resolution | Unit |
|---|---|---|
| 2 | >52.9 | m |
| 3 | >10.2 | m |
| 4 | >3.0 | m |
| 5 | >1.5 | m |
| 6 | >0.85 | m |
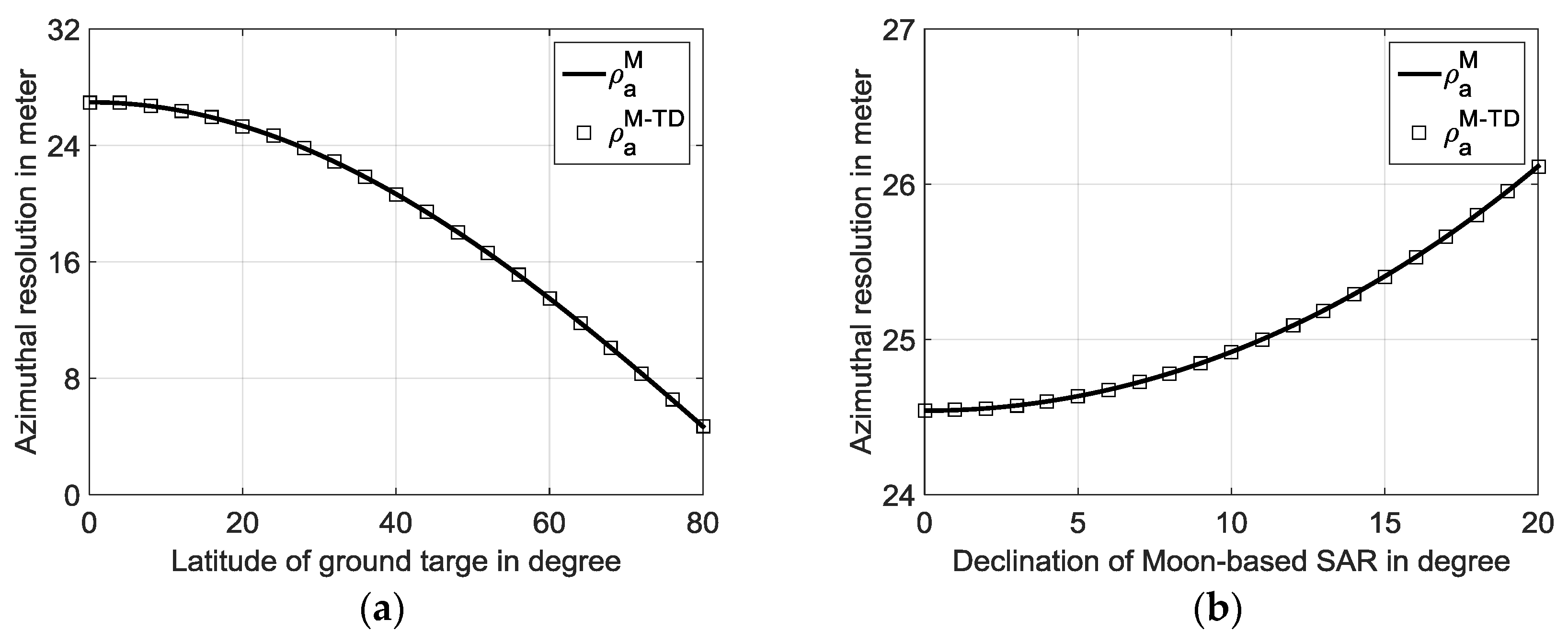
| Declination of Moon-Based SAR | () | () | () | |
| Latitude of Ground Target | ||||
| () | 25.8 m | 26.5 m | 27.8 m | |
| () | 29.8 m | 30.6 m | 32.1 m | |
| () | 19.8 m | 20.3 m | 21.3 m | |
| () | 8.8 m | 9.1 m | 9.5 m | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Chen, K.-S. On Signal Modeling of Moon-Based Synthetic Aperture Radar (SAR) Imaging of Earth. Remote Sens. 2018, 10, 486. https://doi.org/10.3390/rs10030486
Xu Z, Chen K-S. On Signal Modeling of Moon-Based Synthetic Aperture Radar (SAR) Imaging of Earth. Remote Sensing. 2018; 10(3):486. https://doi.org/10.3390/rs10030486
Chicago/Turabian StyleXu, Zhen, and Kun-Shan Chen. 2018. "On Signal Modeling of Moon-Based Synthetic Aperture Radar (SAR) Imaging of Earth" Remote Sensing 10, no. 3: 486. https://doi.org/10.3390/rs10030486
APA StyleXu, Z., & Chen, K. -S. (2018). On Signal Modeling of Moon-Based Synthetic Aperture Radar (SAR) Imaging of Earth. Remote Sensing, 10(3), 486. https://doi.org/10.3390/rs10030486