Soil Moisture and Vegetation Water Content Retrieval Using QuikSCAT Data


Abstract
:
1. Introduction
2. Data
2.1. WindSat Data
2.2. QuikSCAT Data
3. Modeling the QuikSCAT Backscattered Power
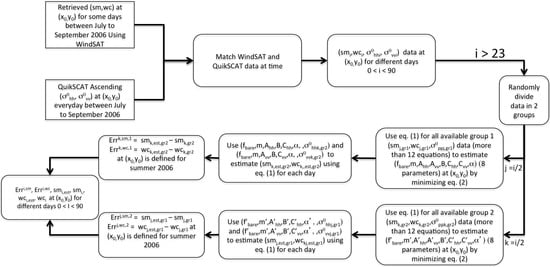
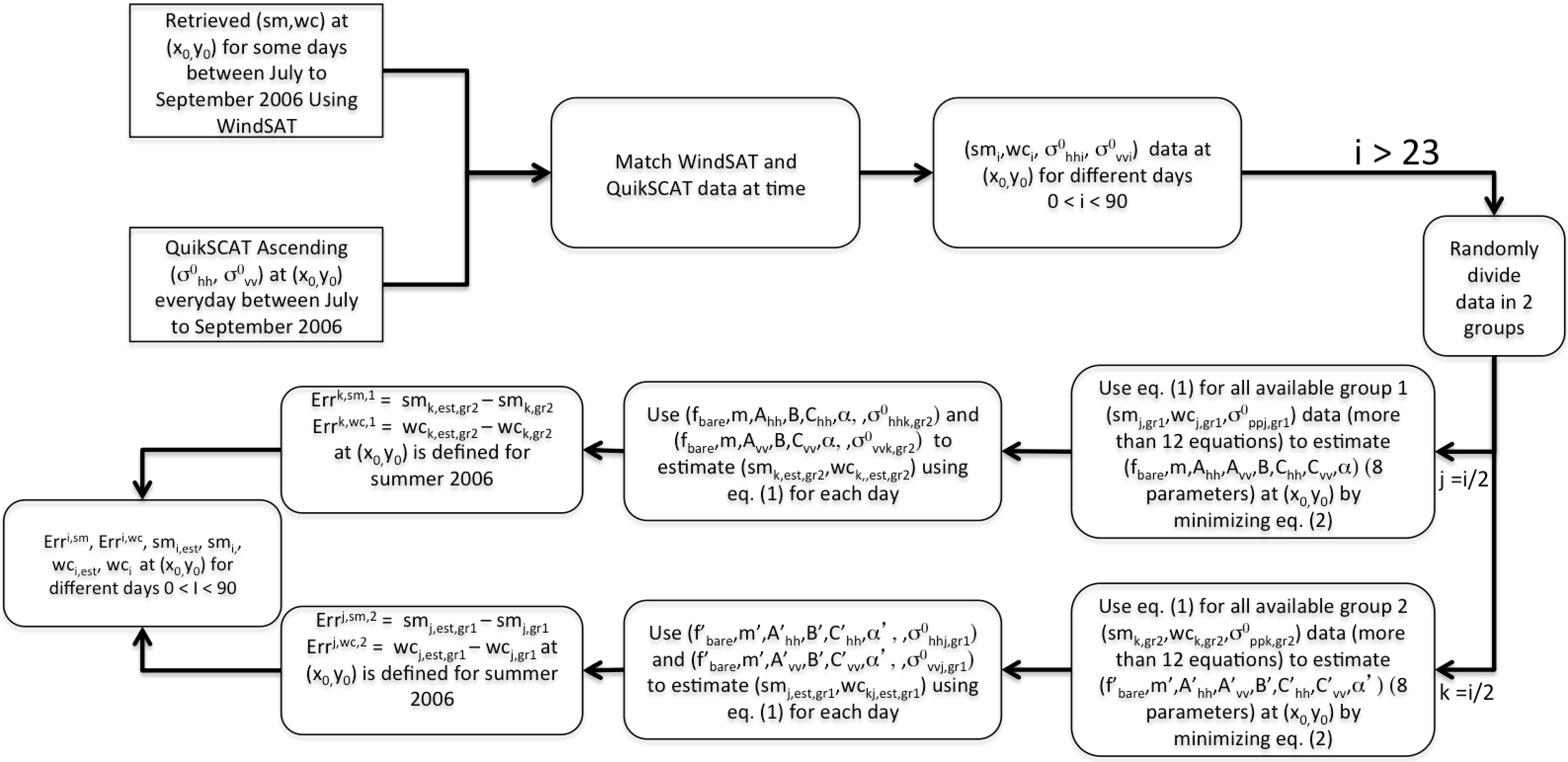
4. Retrieving Soil Moisture and Vegetation Water Content Daily and Globally
4.1. Training the Backscattering Model for Each Location
4.2. Vegetation Water Content and Soil Moisture Retrieval Using QuikSCAT Backscattered Power Data
5. Results and Discussion
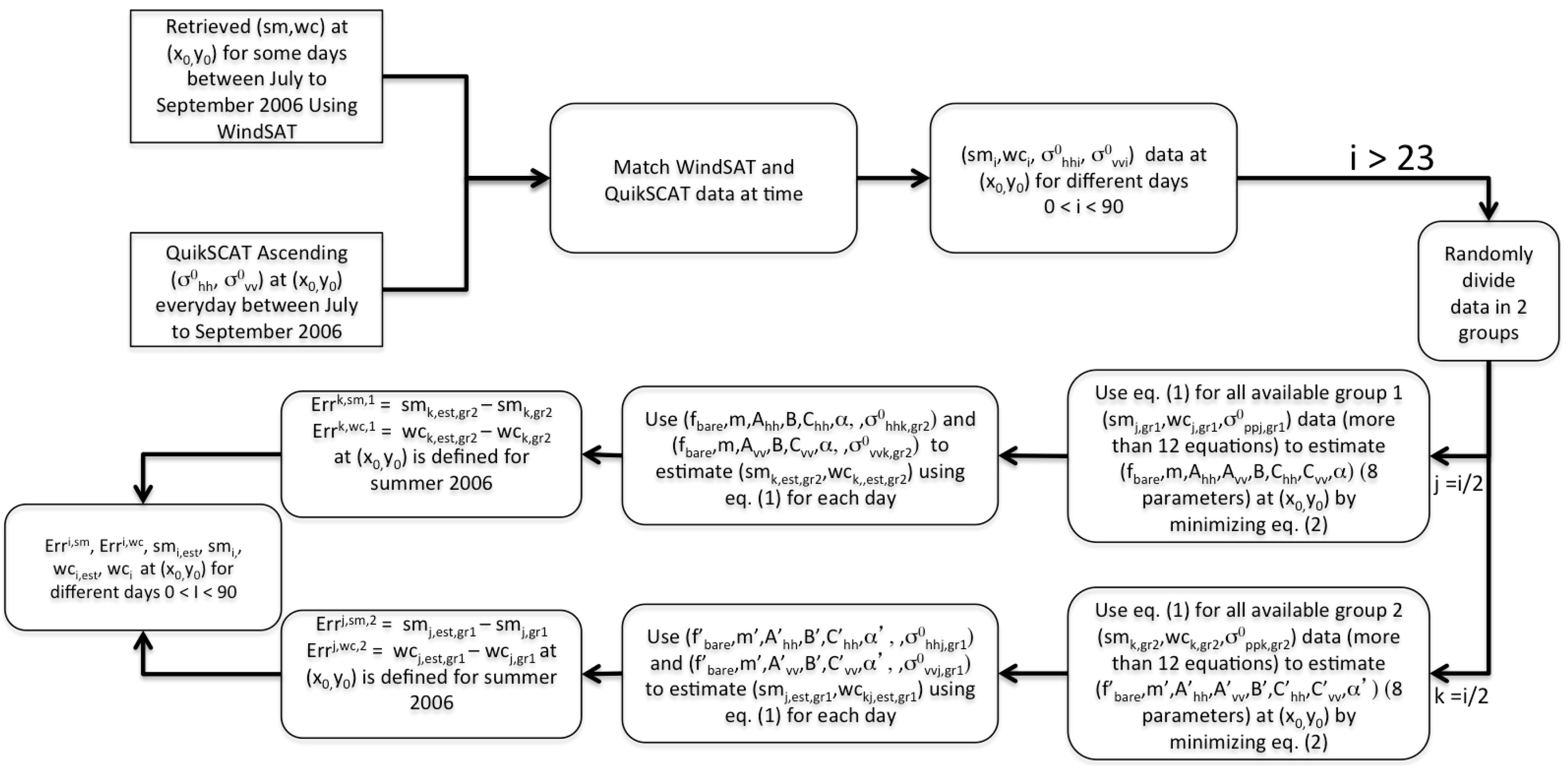
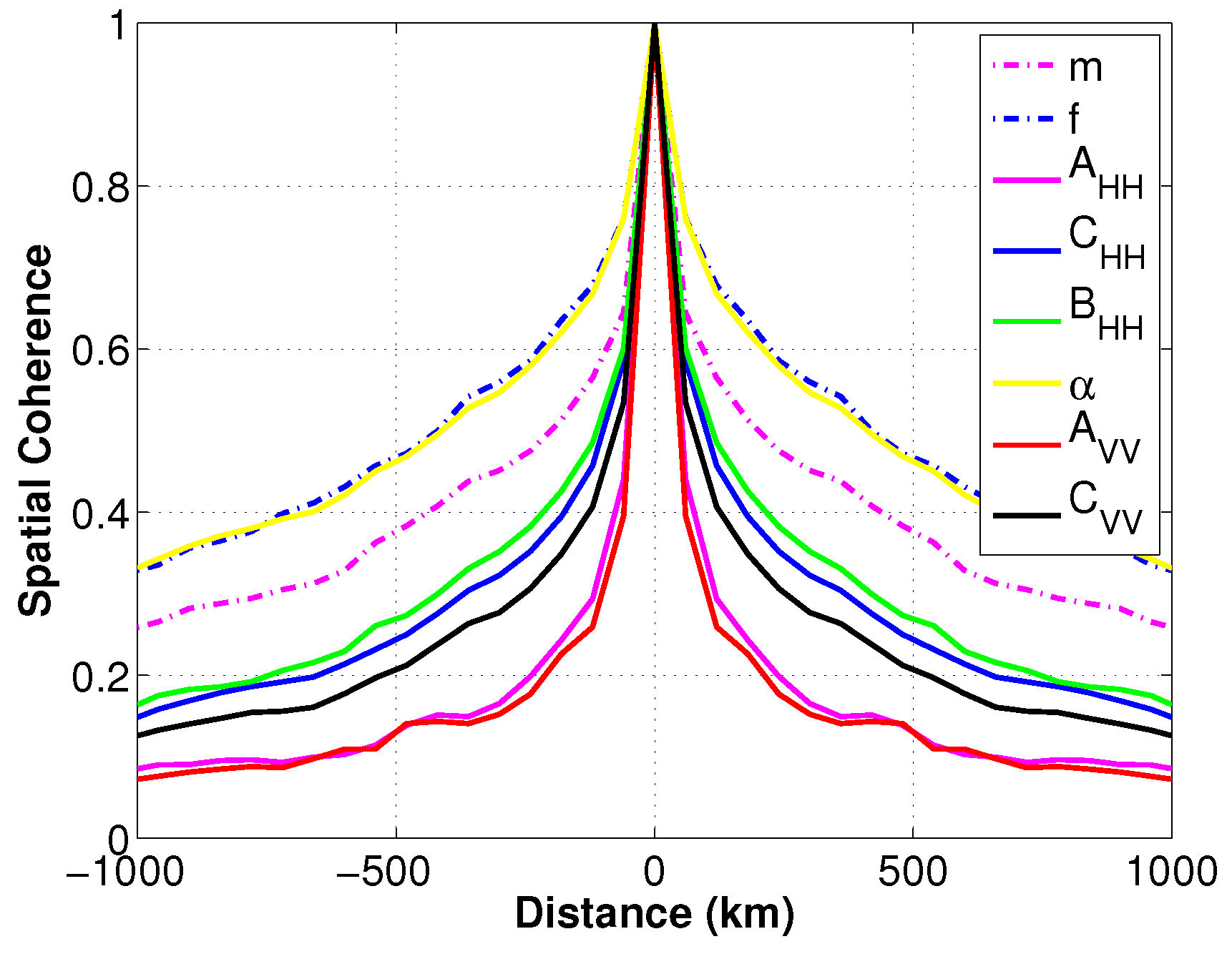
5.1. Temporal and Spatial Correlation of the Backscattering Model Parameters
5.2. Evaluating Bare Surface Fraction Estimation
5.3. Sensitivity Analysis
5.4. Comparing Retrieved Vegetation Water Content and Soil Moisture Using QuikSCAT and WindSat Based on Land Surface Classification
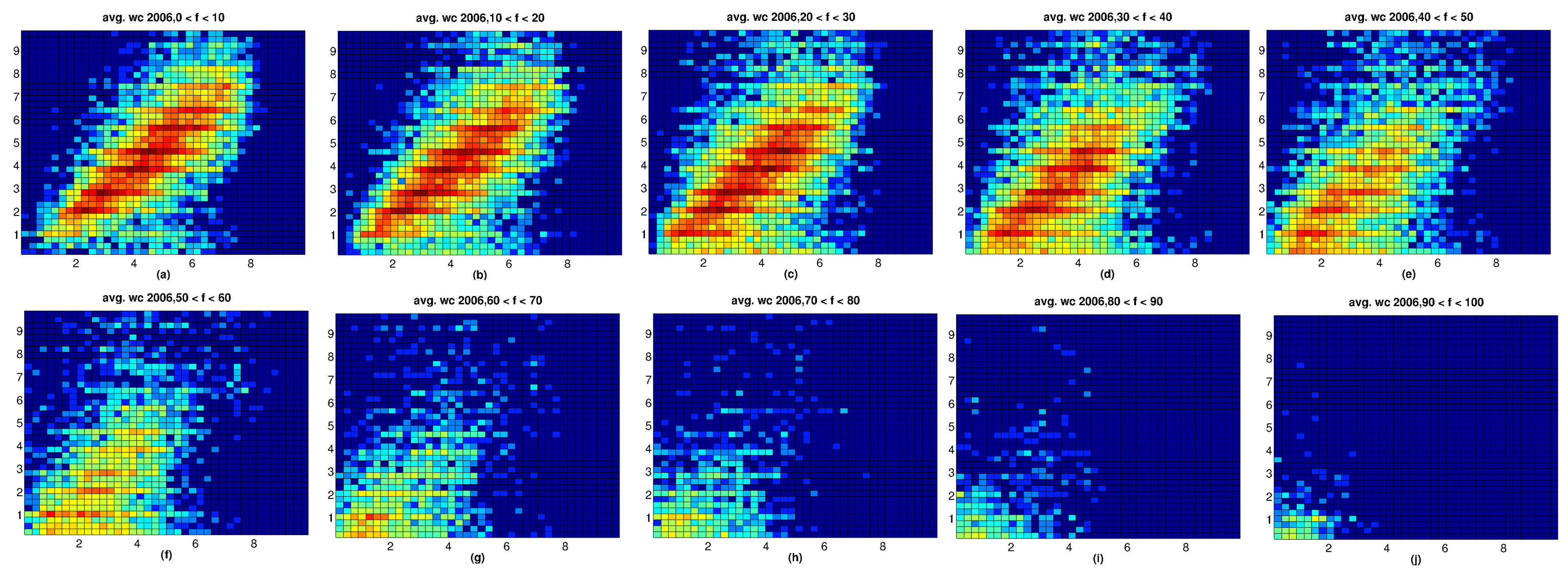
5.5. Comparing Retrieved Vegetation Water Content and Soil Moisture Using QuikSCAT and WindSat Based on Bare Surface Fraction
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Saatchi, S.; Halligan, K.; Despain, D.G.; Crabtree, R.L. Estimation of Forest Fuel Load from Radar Remote Sensing. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1726–1740. [Google Scholar] [CrossRef]
- Saatchi, S.; Asefi-Najafabady, S.; Malhi, Y.; Aragao, L.; Anderson, L.; Myneni, R.; Nemani, R. Persistent effects of a severe drought on Amazonian forest canopy. PNAS 2013, 110, 565–570. [Google Scholar] [CrossRef] [PubMed]
- Li, L.; Gaiser, P.W.; Gao, B.C.; Bevilacqua, R.M.; Jackson, T.J.; Njoku, E.G.; Rudiger, C.; Calvet, J.C.; Bindlish, R. WindSat Global Soil Moisture Retrieval and Validation. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2224–2241. [Google Scholar] [CrossRef]
- Moghaddam, M.; Saatchi, S.; Cuenca, R.H. Estimating subcanopy soil moisture with radar. J. Geophys. Res. 2000, 105, 14899–14911. [Google Scholar] [CrossRef]
- Roo, R.D.; Du, Y.; Ulaby, F.T. A semi-empirical backscattering model at L-band and C-band for a soybean canopy with soil moisture inversion. IEEE Trans. Geosci. Remote Sens. 2001, 39, 864–872. [Google Scholar] [CrossRef]
- Kim, S.B.; Moghaddam, M.; Tsang, L.; Burgin, M.; Xu, X.; Njoku, E.G. Models of L-Band Radar Backscattering Coefficients Over Global Terrain for Soil Moisture Retrieval. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1381–1396. [Google Scholar] [CrossRef]
- Kim, S.B.; Arii, M.; Jackson, T. Modeling L-Band Synthetic Aperture Radar Data Through Dielectric Changes in Soil Moisture and Vegetation Over Shrublands. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4753–4762. [Google Scholar] [CrossRef]
- Bruscantini, C.A.; Konings, A.G.; Narvekar, S.; McColl, K.A.; Entekhabi, D.; Grings, F.M.; Karszenbaum, H. L-Band Radar Soil Moisture Retrieval without Ancillary Information. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 5526–5540. [Google Scholar] [CrossRef]
- Ouellette, J.D.; Johnson, J.T.; Balenzano, A.; Mattia, F.; Satalino, G.; Kim, S.B.; Dunbar, R.S.; Colliander, A.; Cosh, M.H.; Caldwell, T.G.; et al. A Time-Series Approach to Estimating Soil Moisture From Vegetated Surfaces Using L-Band Radar Backscatter. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3186–3193. [Google Scholar] [CrossRef]
- Yang, L.; Du, H.; Zhao, J.; Liu, Q. Global Vegetation Dynamic Monitoring using Multiple Satellite Observations, 2002–2007. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Vancouver, BC, Canada, 24–29 July 2011; pp. 771–774. [Google Scholar]
- Mladenova, I.; Lakshmi, V.; Walker, J.; Long, D.G.; Jeu, R.D. An Assessment of QuikSCAT Ku-Band Scatterometer Data for Soil Moisture Sensitivity. IEEE Geosci. Remote Sens. Lett. 2009, 6, 640–643. [Google Scholar] [CrossRef]
- Zec, J.; Jones, W.L.; Long, D.G. SeaWinds beam and slice balance using data over Amazonian rainforest. Proc. IGARSS 2000, 5, 2215–2217. [Google Scholar]
- Long, D.G.; Drinkwater, B.H.; Saatchi, S.; Bertoia, C. Global ice and land climate studies using scatterometer image data. EOS Trans. AGU 2001, 82, 503. [Google Scholar] [CrossRef]
- Kunz, L.B.; Long, D.G. Calibrating SeaWinds and QuikSCAT scatterometers using natural land targets. IEEE Geosci. Remote Sens. Lett. 2005, 2, 182–186. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Senising, Active and Passive; Artech House, Inc.: Norwood, MA, USA, 1981. [Google Scholar]
- Saatchi, S.; McDonald, K.C. Coherent Effects in Microwave Backscattering Models for Forest Canopies. IEEE Trans. Geosci. Remote Sens. 1997, 35, 1032–1044. [Google Scholar] [CrossRef]
- Oh, Y.; Sarabandi, K.; Ulaby, F. An Empirical Model and an Inversion Technique for Radar Scattering from Bare Soil Surfaces. IEEE Trans. Geosci. Remote Sens. 1992, 30, 370–381. [Google Scholar] [CrossRef]
- Hallikainen, M.T.; Ulaby, F.; Dobson, M.C.; El-Rayes, M.A.; Wu, L. Microwave Dielectric Behavior of Wet Soil-Part 1: Empirical Models and Experimental Observations. IEEE Trans. Geosci. Remote Sens. 1985, 23, 25–34. [Google Scholar] [CrossRef]
- Cloude, S.R.; Papathanassiou, K.P. Polarimetric SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1551–1565. [Google Scholar] [CrossRef]
- Papathanassiou, K.P.; Cloude, S.R. Single-Baseline Polarimetric SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2352–2362. [Google Scholar] [CrossRef]
- Reynolds, C.A.; Jackson, T.J.; Rawls, W.J. Estimating soil water-holding capacities by linking the Food and Agriculture Organization Soil map of the world with global pedon databases and continuous pedotransfer functions. Water Resour. Res. 2000, 36, 3653–3662. [Google Scholar] [CrossRef]
- Hansen, M.; DeFries, R.; Townshend, J.; Sohlberg, R. Global land cover classification at 1km resolution using a decision tree classifier. Int. J. Remote Sens. 2000, 21, 1331–1365. [Google Scholar] [CrossRef]
- DiMiceli, C.; Carroll, M.; Sohlberg, R.; Huang, C.; Hansen, M.; Townshend, J. Vegetation Continuous Fields; University of Maryland: College Park, MD, USA, 2010. [Google Scholar]
- Moran, M.S.; Vidal, A.; Troufleau, D.; Inoue, Y.; Mitchell, T.A. Ku- and C-Band SAR for Discriminating Agricultural Crop and Soil Conditions. IEEE Trans. Geosci. Remote Sens. 1994, 36, 265–272. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| m | f | |||||||
|---|---|---|---|---|---|---|---|---|
| Temporal correlation of and | 0.17 | 0.73 | 0.17 | 0.3 | 0.33 | 0.41 | 0.14 | 0.24 |
| 2.2 | 1.7 | 42.9 | 20.7 | 20.2 | 9.3 | 38.1 | 27.1 | |
| 125 | 55 | 304 | 163 | 153 | 71 | 307 | 203 |
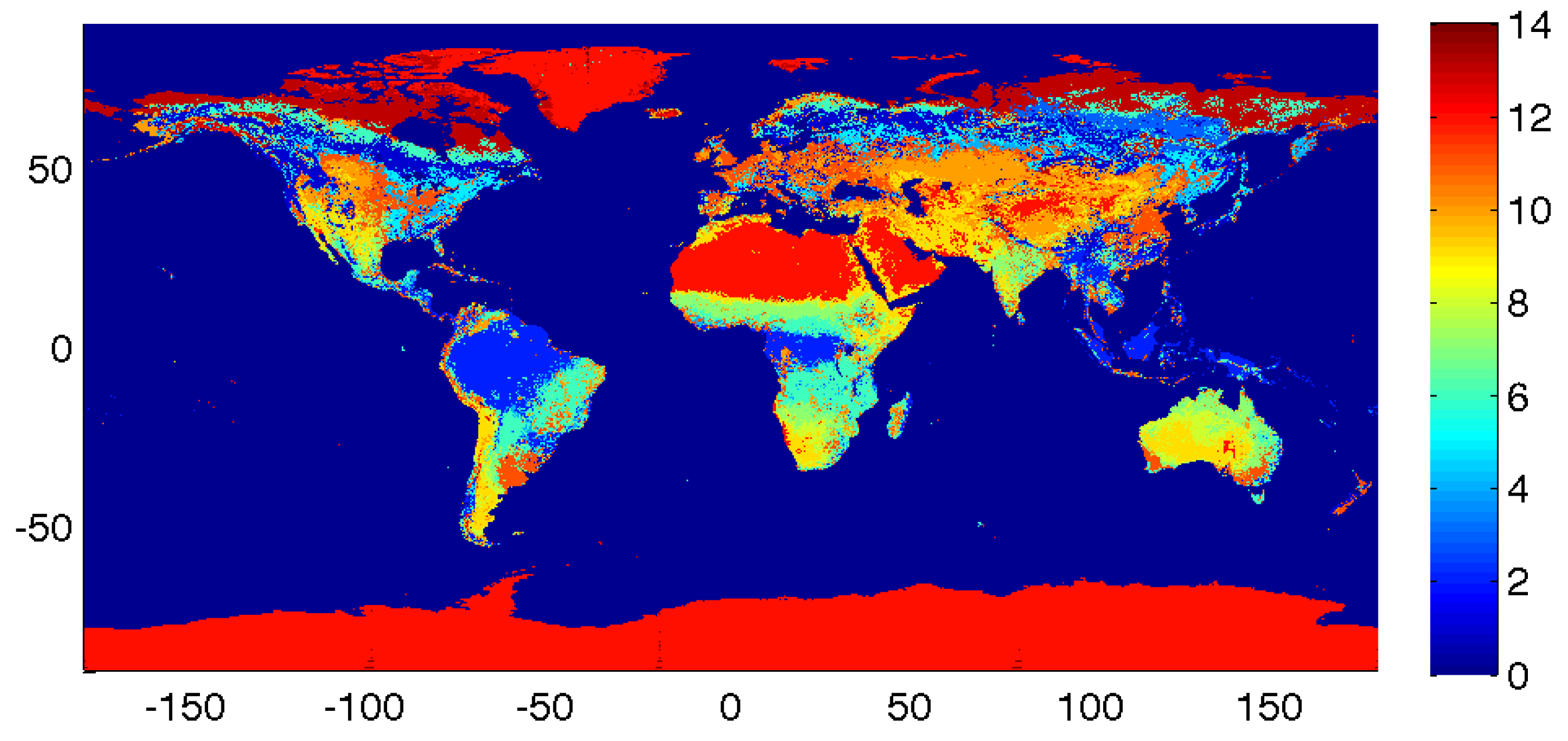
| Land Class Defined in Figure 3 | 1 | 2 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
|---|---|---|---|---|---|---|---|---|---|---|
| correlation between f using | ||||||||||
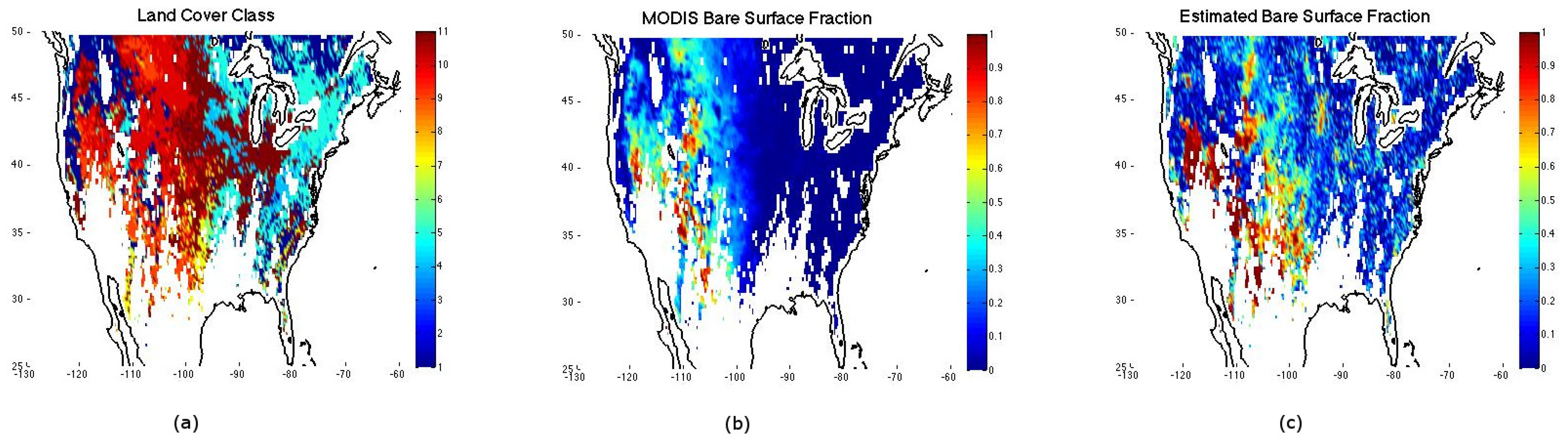
| MODIS and QuikSCAT over U.S. | 0.18 | −0.04 | −0.01 | 0.31 | 0.46 | 0.53 | 0.57 | 0.54 | 0.38 | |
| correlation between f using | ||||||||||
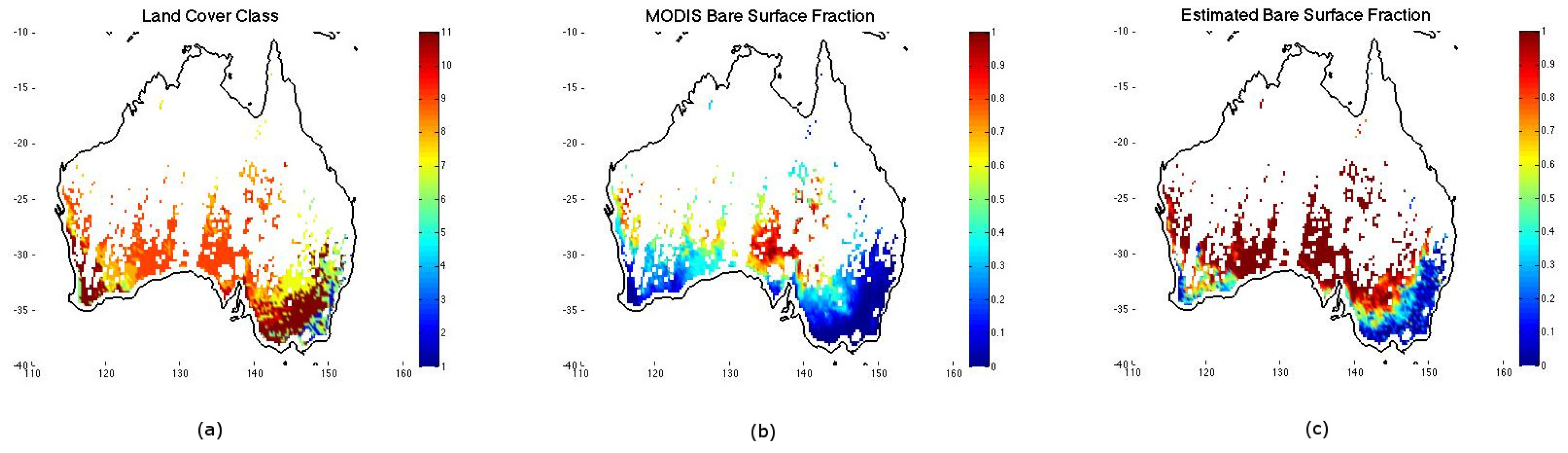
| MODIS and QuikSCAT over Australia | 0.16 | 0.7 | 0.54 | 0.37 | 0.2 | 0.65 | 0.73 | |||
| correlation between f using | ||||||||||
| MODIS and QuikSCAT globally | 0.15 | 0.05 | −0.02 | 0.08 | 0.14 | 0.48 | 0.23 | 0.38 | 0.62 | 0.3 |
| 3.9481 | 3.3357 | 3.9843 | 3.6804 | 9.2442 | 3.1523 | 4.5713 | 2.1570 | |
| 6.7795 | 2.2424 | 3.4495 | 2.8116 | 7.4456 | 2.5390 | 6.9394 | 1.5846 |
| Row 1 | Land Class | 1 | 2 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| Row 2 | correlation between wc of QuikSCAT and WindSat | 0.55 | 0.5 | 0.5 | 0.52 | 0.41 | 0.47 | 0.21 | 0.19 | 0.4 | 0.42 |
| Row 3 | correlation between sm of QuikSCAT and WindSat | 0.11 | 0.1 | 0.12 | 0.03 | 0.22 | 0.25 | 0.31 | 0.33 | 0.43 | 0.21 |
| Row 4 | 2.6 | −3.5 | 0.8 | 0.7 | −0.3 | 1.1 | 68.4 | 40.5 | 16.7 | 3.9 | |
| Row 5 | 4.2 | 9.5 | 1.6 | -2.4 | 36.6 | 53.7 | 40.6 | 30.3 | 30.1 | 24.8 | |
| Row 6 | 54.1 | 43.6 | 51.8 | 50 | 60 | 72.4 | 221.4 | 219.9 | 116.1 | 67.7 | |
| Row 7 | 83.6 | 86.5 | 88.9 | 79.3 | 116.3 | 142.4 | 127 | 124.5 | 136.5 | 106 |
| Row 1 | Bare Surface Fraction (%) | 0–10 | 10–20 | 20–30 | 30–40 | 40–50 | 50–60 | 60–70 | 70–80 | 80–90 | 90–100 |
| Row 2 | correlation between wc of QuikSCAT and WindSat | 0.6 | 0.56 | 0.49 | 0.43 | 0.44 | 0.37 | 0.34 | 0.3 | 0.26 | 0.12 |
| Row 3 | correlation between sm of QuikSCAT and WindSat | −0.06 | 0.06 | 0.17 | 0.25 | 0.38 | 0.46 | 0.5 | 0.57 | 0.62 | 0.51 |
| Row 4 | 2.2 | 2.6 | 3.2 | 3.5 | 4.1 | 5.5 | 12.3 | 22.4 | 30.8 | 66.6 | |
| Row 5 | 2.3 | 14.1 | 18.1 | 24.2 | 25.9 | 27.6 | 26.9 | 18.3 | 11.4 | 10.6 | |
| Row 6 | 41.5 | 47.9 | 59.1 | 70.4 | 78.4 | 92.4 | 114.4 | 148.7 | 183.3 | 277.7 | |
| Row 7 | 99.2 | 101.4 | 97.9 | 98.3 | 97.9 | 96.4 | 95.5 | 84.3 | 75 | 80.4 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oveisgharan, S.; Haddad, Z.; Turk, J.; Rodriguez, E.; Li, L. Soil Moisture and Vegetation Water Content Retrieval Using QuikSCAT Data. Remote Sens. 2018, 10, 636. https://doi.org/10.3390/rs10040636
Oveisgharan S, Haddad Z, Turk J, Rodriguez E, Li L. Soil Moisture and Vegetation Water Content Retrieval Using QuikSCAT Data. Remote Sensing. 2018; 10(4):636. https://doi.org/10.3390/rs10040636
Chicago/Turabian StyleOveisgharan, Shadi, Ziad Haddad, Joe Turk, Ernesto Rodriguez, and Li Li. 2018. "Soil Moisture and Vegetation Water Content Retrieval Using QuikSCAT Data" Remote Sensing 10, no. 4: 636. https://doi.org/10.3390/rs10040636
APA StyleOveisgharan, S., Haddad, Z., Turk, J., Rodriguez, E., & Li, L. (2018). Soil Moisture and Vegetation Water Content Retrieval Using QuikSCAT Data. Remote Sensing, 10(4), 636. https://doi.org/10.3390/rs10040636