BeiDou System (BDS) Triple-Frequency Ambiguity Resolution without Code Measurements

Abstract
:1. Introduction
2. BeiDou System (BDS) Triple-Frequency Double-Differenced (DD) Linear Combinations
3. Methods
3.1. Generalized Phase-Code Method
3.2. Modified Phase-Only Method
3.2.1. Determination of the Phase Range
3.2.2. Candidates of Wide-Lane (WL) Integer Ambiguities
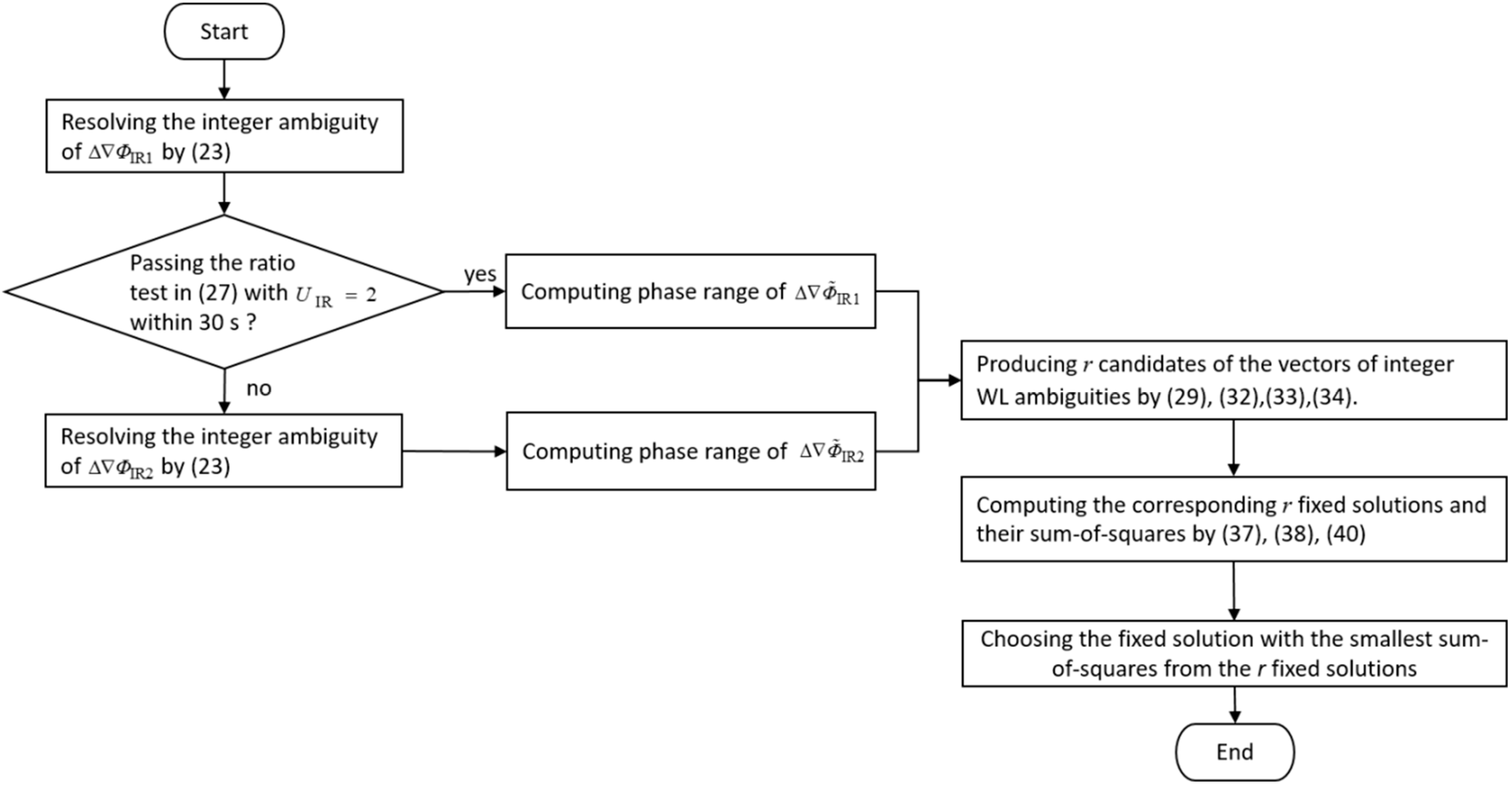
3.2.3. Resolving Triple-Frequency DD Integer-Phase Ambiguities
4. Experimental Analyses
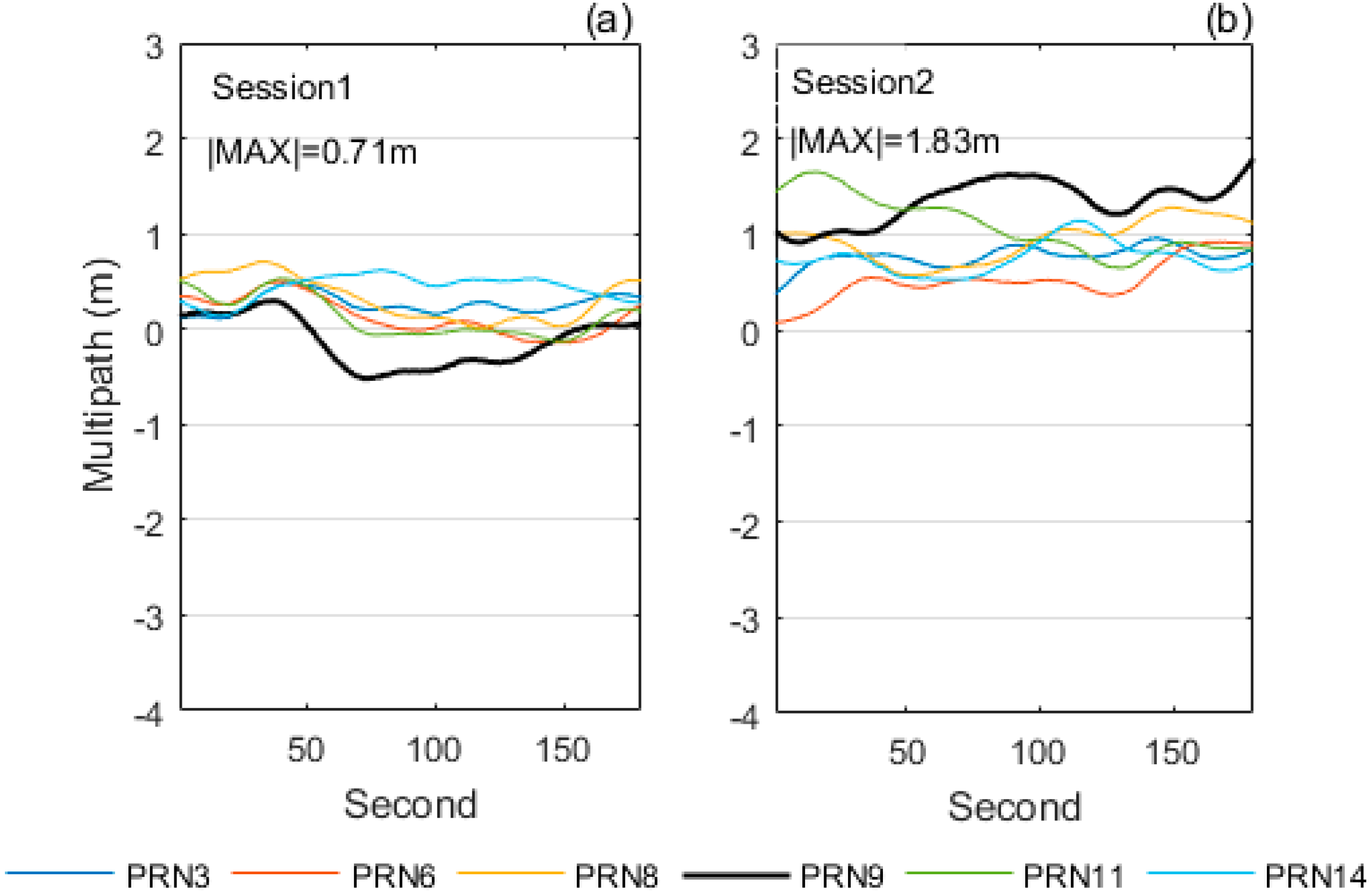
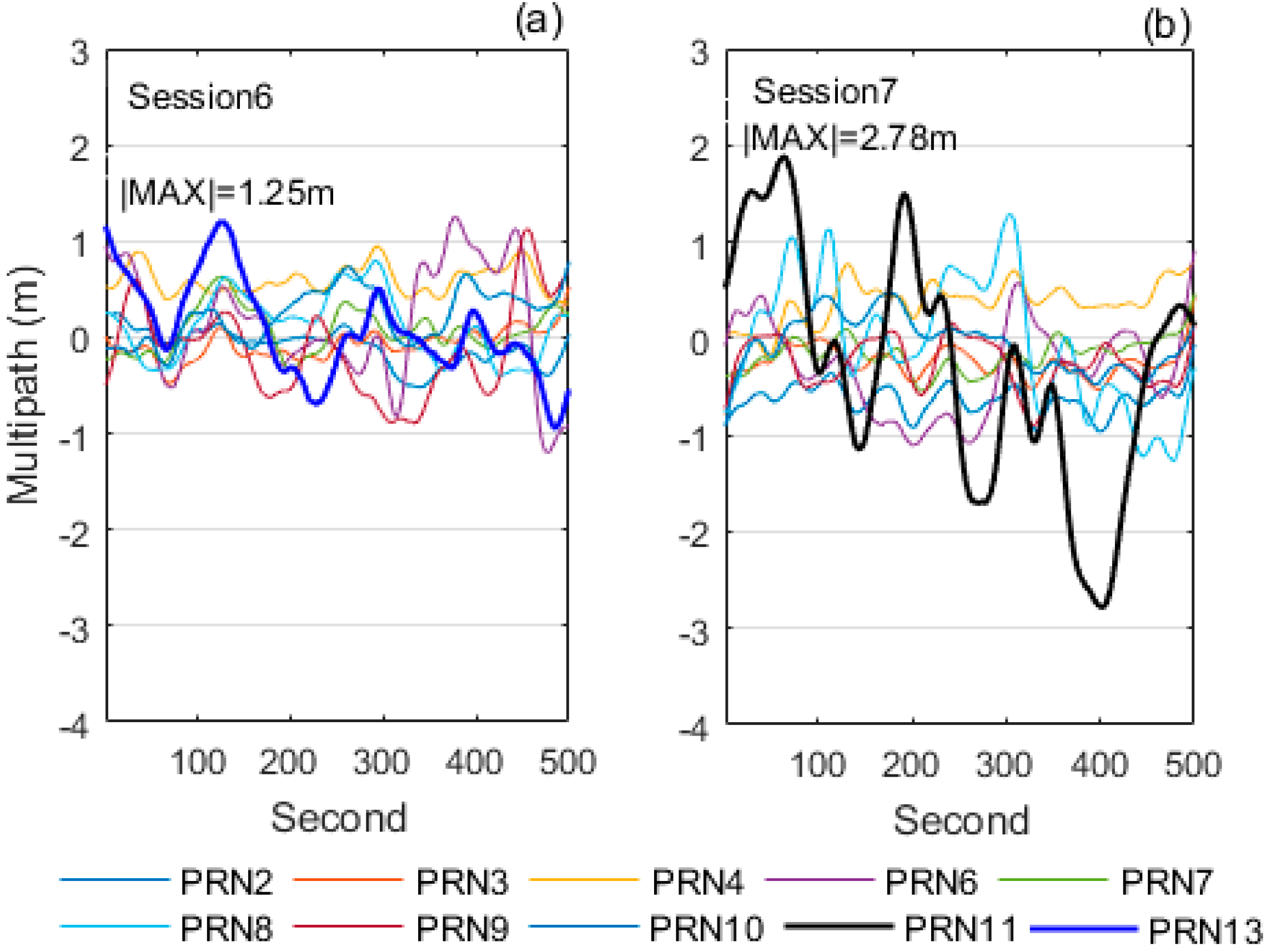
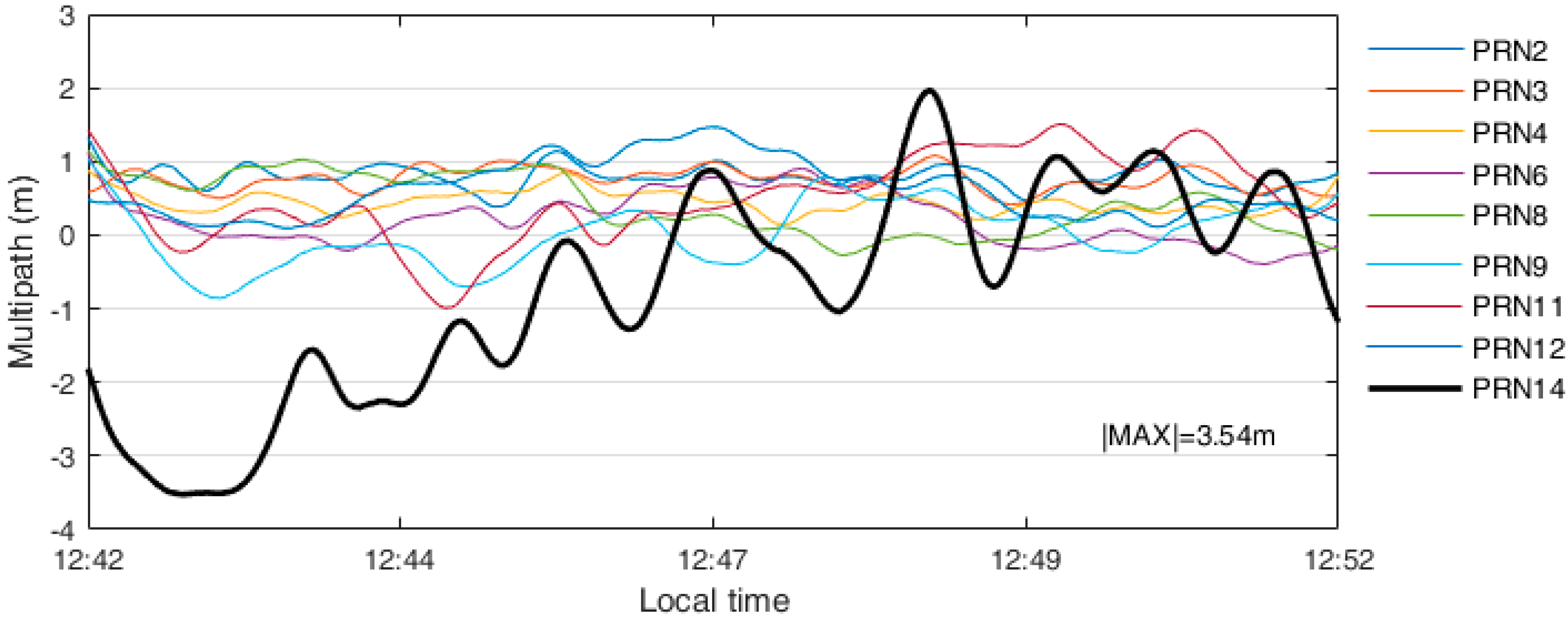
4.1. Effect of Code Multipath
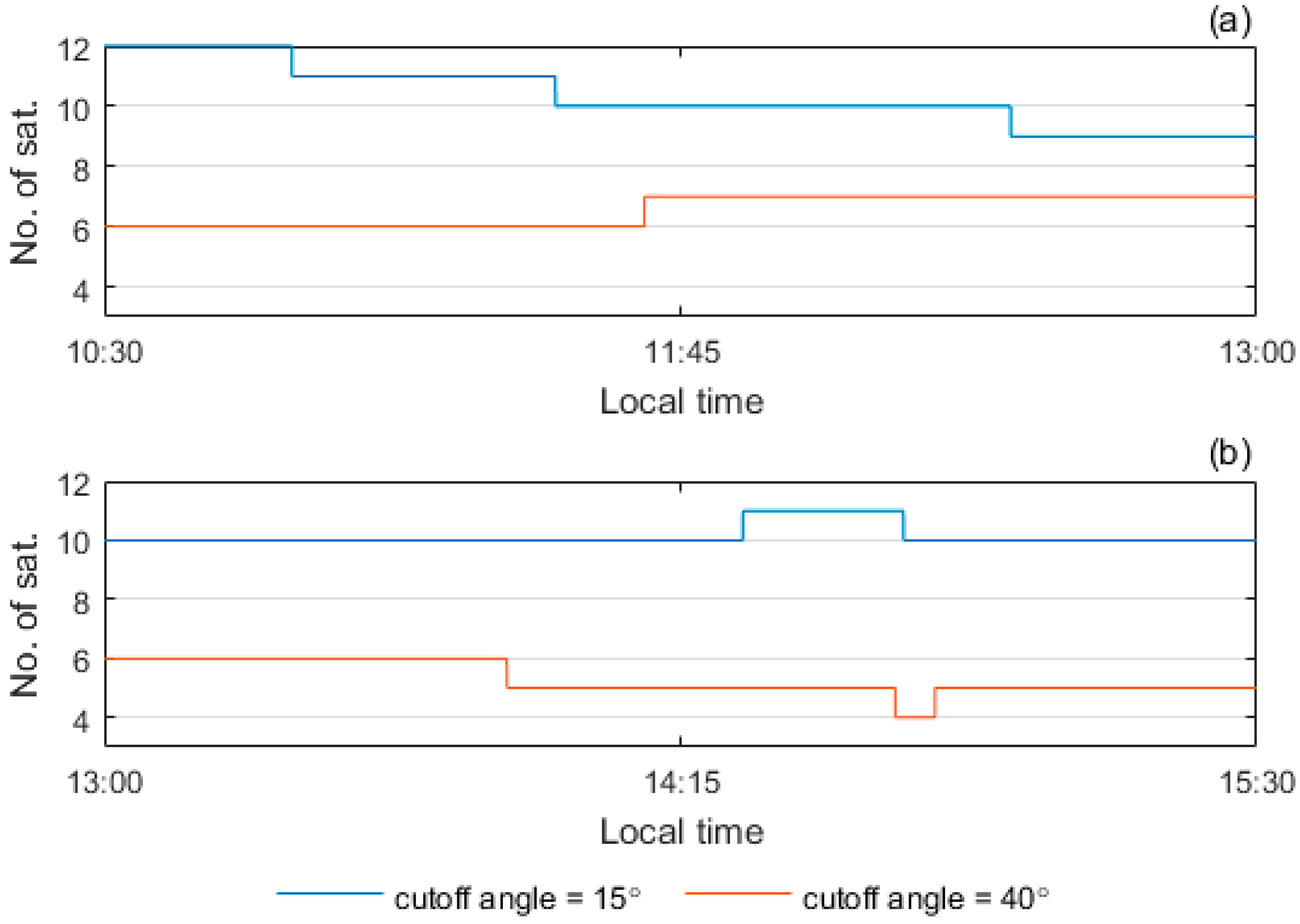
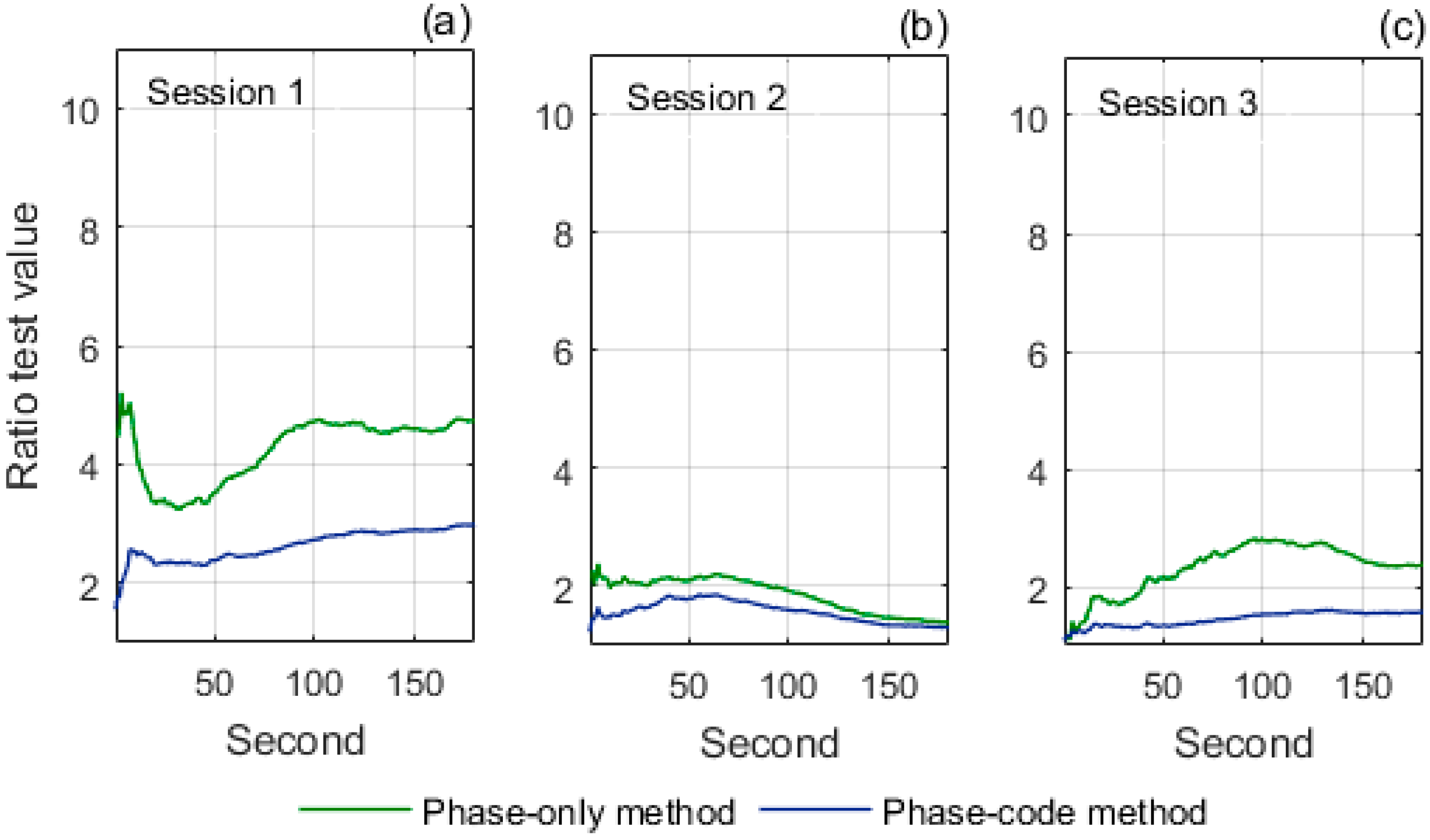
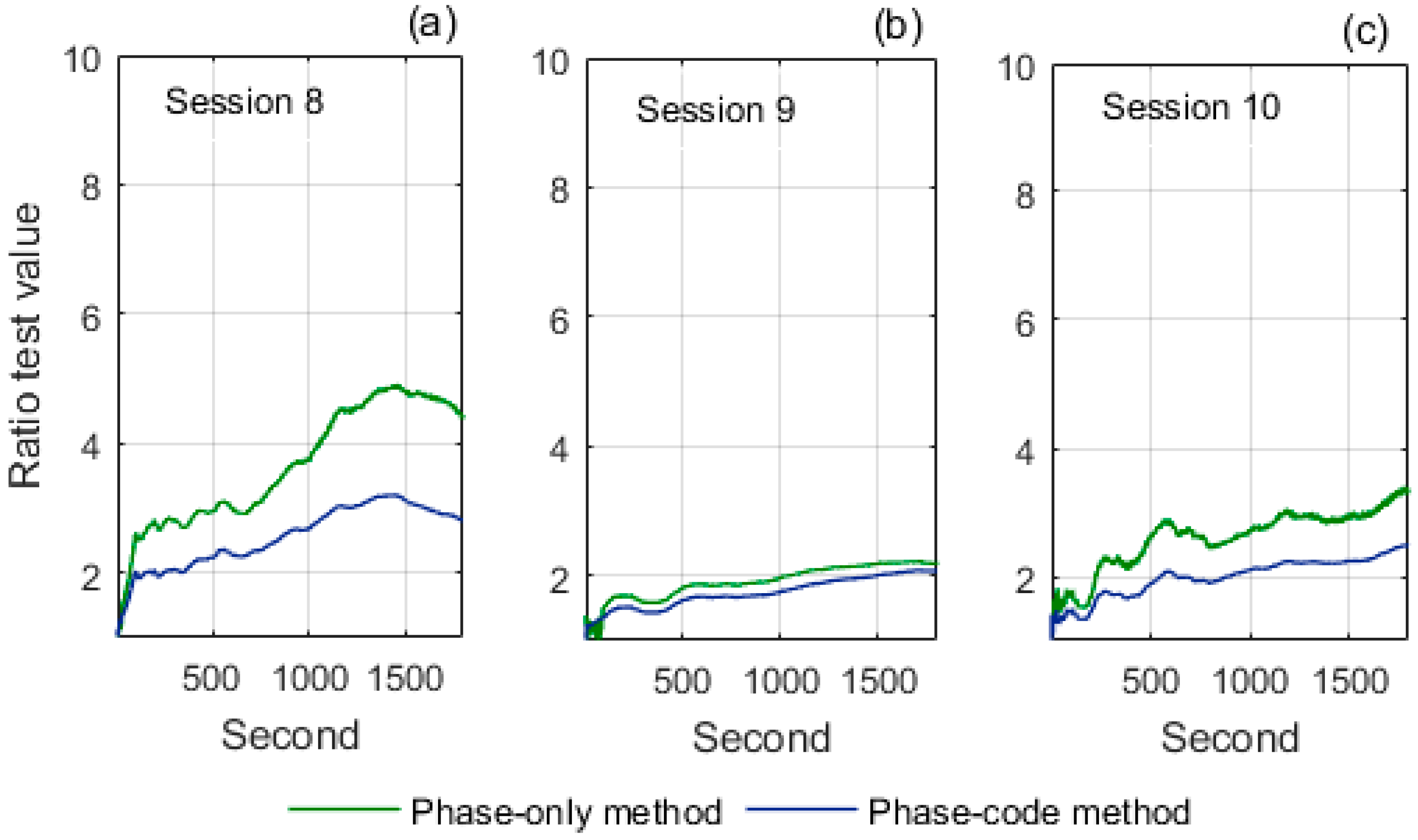
4.2. Effects of Phase Noise and Satellite Geometry
4.3. Success Percentage
5. A Demonstration in an Environment with Obvious Multipath Effects
6. Discussion
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kleusberg, A. Kinematic relative positioning using GPS code and carrier beat phase observations. Mar. Geodesy 1986, 10, 257–274. [Google Scholar] [CrossRef]
- Bossler, J.D.; Goad, C.C.; Bender, P.L. Using the global positioning system (GPS) for geodetic positioning. Bull. Géodesique 1980, 54, 553–563. [Google Scholar] [CrossRef]
- Goad, C.C.; Remondi, B.W. Initial relative positioning results using the global positioning system. Bull. Géodesique 1984, 58, 193–210. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; de Jonge, P.J.; Tiberius, C.C.J.M. The least-squares ambiguity decorrelation adjustment: Its performance on short GPS baselines and short observation spans. J. Geodesy 1997, 71, 589–602. [Google Scholar] [CrossRef]
- Odijk, D. Ionosphere-free phase combinations for modernized GPS. J. Surv. Eng. 2003, 129, 165–173. [Google Scholar] [CrossRef]
- Kleusberg, A.; Teunissen, P.J.G. GPS for Geodesy; Springer: Berlin, Germany, 1996. [Google Scholar]
- Teunissen, P.J.G.; Odijk, D. Rank-defect integer estimation and phase-only modernized GPS ambiguity resolution. J. Geodesy 2003, 76, 523–535. [Google Scholar] [CrossRef]
- Chu, F.-Y.; Yang, M.; Wu, J. A new approach to modernized GPS phase-only ambiguity resolution over long baselines. J. Geodesy 2016, 90, 241–254. [Google Scholar] [CrossRef]
- Cocard, M.; Bourgon, S.; Kamali, O.; Collins, P. A systematic investigation of optimal carrier-phase combinations for modernized triple-frequency GPS. J. Geodesy 2008, 82, 555–564. [Google Scholar] [CrossRef]
- Feng, Y. GNSS three carrier ambiguity resolution using ionosphere-reduced virtual signals. J. Geodesy 2008, 82, 847–862. [Google Scholar] [CrossRef]
- Chen, H.-C.; Huang, Y.-S.; Chiang, K.-W.; Yang, M.; Rau, R.-J. The performance comparison between GPS and BeiDou-2/COMPASS: A perspective from Asia. J. Chin Inst. Eng. 2009, 32, 679–689. [Google Scholar] [CrossRef]
- Montenbruck, O.; Hauschild, A.; Steigenberger, P.; Hugentobler, U.; Teunissen, P.; Nakamura, S. Initial assessment of the COMPASS/BeiDou-2 regional navigation satellite system. GPS Solut. 2013, 17, 211–222. [Google Scholar] [CrossRef]
- CSNO. BeiDou Navigation Satellite System Signal in Space Interface Control Document: Open Service Signal, Version 2.0. China Satellite Navigation Office, December 2013. Available online: http://www.beidou.gov.cn (accessed on 1 June 2016).
- Tang, W.; Deng, C.; Shi, C.; Liu, J. Triple-frequency carrier ambiguity resolution for BeiDou navigation satellite system. GPS Géodesique 2014, 18, 335–344. [Google Scholar] [CrossRef]
- Zhao, Q.; Dai, Z.; Hu, Z.; Sun, B.; Shi, C.; Liu, J. Three-carrier ambiguity resolution using the modified TCAR method. GPS Solut. 2014, 19, 589–599. [Google Scholar] [CrossRef]
- Zhang, X.; He, X. Performance analysis of triple-frequency ambiguity resolution with BeiDou observations. GPS Solut. 2015, 20, 269–281. [Google Scholar] [CrossRef]
- He, X.; Zhang, X.; Tang, L.; Liu, W. Instantaneous real-time kinematic decimeter-level positioning with BeiDou triple-frequency signals over medium baselines. Sensors 2016, 16, 1. [Google Scholar] [CrossRef] [PubMed]
- Li, B.; Feng, Y.; Gao, W.; Li, Z. Real-time kinematic positioning over long baselines using triple-frequency BeiDou signals. IEEE Trans. Aerosp. Electron. Syst. 2016, 51, 3254–3269. [Google Scholar] [CrossRef]
- Leick, A.; Rapoport, L.; Tatarnikov, D. GPS Satellite Surveying, 4th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2015. [Google Scholar]
- Zhang, X.; He, X. BDS triple-frequency carrier-phase linear combination and their characteristics. Sci. China Earth Sci. 2015, 58, 896–905. [Google Scholar] [CrossRef]
- Hatch, R. The Synergism of GPS Code and Carrier Measurement. In Proceedings of the Third International Geodetic Symposium on Satellite Doppler Positioning, Las Cruces, NM, USA, 8–12 February 1982. [Google Scholar]
- Niell, A.E. Global mapping functions for the atmosphere delay at radio wavelengths. J. Geophys. Res. 1996, 101, 1978–2012. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geodesy 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Euler, H.J.; Schaffrin, B. On a Measure for the Discernibility between Different Ambiguity Solutions in the Static-kinematic GPS-mode. In Proceedings of the IAG Symposia, Banff, AL, Canada, 10–13 September 1990. [Google Scholar]
- Verhagen, S. Integer ambiguity validation: An open problem? GPS Solut. 2004, 8, 36–43. [Google Scholar] [CrossRef]
- Verhagen, S.; Teunissen, P.J.G. The ratio test for future GNSS ambiguity resolution. GPS Solut. 2013, 17, 535–548. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Hopfield, H.S. Two-quartic tropospheric refractivity profile for correcting satellite data. J. Geophys. Res. 1969, 74, 4487–4499. [Google Scholar] [CrossRef]
- Goad, C.; Yang, M. A new approach to precision airborne GPS positioning for photogrammetry. Photogramm. Eng. Remote Sens. 1997, 63, 1067–1077. [Google Scholar]
- Feng, Y.; Li, B. Three carrier ambiguity resolutions: Generalised problems, models and solutions. J. Glob. Position. Syst. 2009, 8, 115–123. [Google Scholar] [CrossRef]
- Vollath, U.; Birnbach, S.; Landau, H. Analysis of Three-carrier Ambiguity Resolution (TCAR) Technique for Precise Relative Positioning in GNSS-2. In Proceedings of the ION GPS-98, Nashville, TN, USA, 15–18 September 1998. [Google Scholar]
- Schaer, S.; Gurtner, W.; Feltens, J. The Ionosphere Map Exchange Format Version 1. In Proceedings of the IGS Analysis Centers Workshop, Darmstadt, Germany, 9–11 February 1998. [Google Scholar]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Romero, I.; Noll, C.; Sturze, A.; Weber, G.; et al. The Multi-GNSS experiment (MGEX) of the International GNSS Service (IGS)—achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1691. [Google Scholar] [CrossRef]
- Nadarajah, N.; Teunissen, P.J.G.; Sleewaegen, J.-M.; Montenbruck, O. The mixed-receiver BeiDou inter-satellite-type bias and its impact on RTK positioning. GPS Solut. 2015, 19, 357–368. [Google Scholar] [CrossRef]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Wasle, E. GNSS—Global Navigation Satellite Systems; SpringerWienNewYork: Wien, Austria, 2008. [Google Scholar]
- Ji, S.; Chen, W.; Zhao, C.; Ding, X.; Chen, Y. Single epoch ambiguity resolution for Galileo with the CAR and LAMBDA methods. GPS Solut. 2007, 11, 259–268. [Google Scholar] [CrossRef]
- Chu, F.-Y.; Yang, M. GPS/Galileo long baseline computation: Method and performance analyses. GPS Solut. 2014, 18, 263–272. [Google Scholar] [CrossRef]
- Odolinski, R.; Teunissen, P.J.G.; Odijk, D. Combined BDS, Galileo, QZSS and GPS single-frequency RTK. GPS Solut. 2015, 19, 151–163. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 3rd ed.; Pearson Education: London, UK, 2017. [Google Scholar]
- Koch, K.R. Parameter Estimation and Hypothesis Testing in Linear Models, 2nd ed.; Springer: Berlin, Germany, 1999. [Google Scholar]
- Hsu, L.-T.; Tokura, H.; Kubo, N.; Gu, Y.; Kamijo, S. Multiple faulty GNSS measurement exclusion based on consistency check in urban canyons. IEEE Sens. J. 2017, 17, 1558–1748. [Google Scholar] [CrossRef]
- Lau, L.; Cross, P. Development and testing of a new ray-tracing approach to GNSS carrier-phase multipath modelling. J. Geodesy 2007, 81, 713–732. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subscript | Signal | Frequency (MHz) |
|---|---|---|
| 1 | B1 | 1561.098 |
| 2 | B2 | 1207.140 |
| 3 | B3 | 1268.520 |
| Name | Symbol | Combination | Sigma (m) | Ion. Delay Amplifying Factor | Synthetic Wavelength (m) |
|---|---|---|---|---|---|
| Phase IF | 0.017 | 0 | 0.0006 | ||
| 0.021 | 0 | 0.0007 | |||
| IR | 1.035 | 0.6521 | 6.3707 | ||
| 0.671 | −0.0278 | 1.480 | |||
| WL | 0.033 | −1.293 | 0.8470 | ||
| 0.041 | −1.231 | 1.0247 | |||
| EWL | 0.0171 | −1.592 | 4.8842 | ||
| Code IF | 1.738 | 0 | |||
| 2.117 | 0 | ||||
| HMW | 0.428 | 0 | 0.8470 | ||
| 0.427 | 0 | 1.0247 |
| Baseline | Obs. Period (Local Time) | Sampling Interval | Cutoff Angle | RMS of Phase DIF | RMS of Code DIF |
|---|---|---|---|---|---|
| 37 km | 10:30–13:00, 23 October 2015 | 1 s | 15° | 0.0054 m | 0.75 m |
| 40° | 0.0036 m | 0.65 m | |||
| 256 km | 13:00–15:30, 1 April 2017 | 1 s | 15° | 0.0046 m | 0.69 m |
| 40° | 0.0030 m | 0.57 m |
| Measurement Errors | Processing Strategy |
|---|---|
| Orbital errors | Reduced with double-differenced (DD) technique (precise ephemeris obtained from International GNSS Service (IGS) Multi-GNSS experiment (MGEX) [33]) |
| Sat. and rec. clock errors | Eliminated with DD technique |
| Ionospheric delays | Eliminated by linear combinations |
| Tropospheric delays | Reduced by DD technique and estimating an additional relative zenith tropospheric delay parameter (RZTD) parameter with the Niell mapping function [22] |
| Inter-satellite-type bias | Homogenous receivers (Trimble R9) [34] |
| Observation weighting | 60 cm, 6 mm (given with typical level) [35] |
| Baseline | Session No. | Obs. Period (Local Time) | Cutoff Angle | No. of Sat. | RMS of Phase DIF | RMS of Code DIF | Mean Positional Dilution of Precision (PDOP) |
|---|---|---|---|---|---|---|---|
| 37 km | 1 | 12:27–12:30 | 40° | 7 | 0.003 m | 0.54 m | 4.1 |
| 2 | 12:12–12:15 | 40° | 7 | 0.003 m | 1.051 m | 4.5 | |
| 3 | 11:32–11:35 | 15° | 10 | 0.004 m | 0.60 m | 2.4 | |
| 4 | 11:38–11:41 | 15° | 10 | 0.006 m | 0.64 m | 2.4 | |
| 5 | 11:40–11:43 | 40° | 7 | 0.004 m | 0.60 m | 3.2 | |
| 256 km | 6 | 15:22–15:30 | 15° | 10 | 0.005 m | 0.64 m | 1.4 |
| 7 | 13:48–13:56 | 15° | 10 | 0.005 m | 0.80 m | 1.4 | |
| 8 | 14:48–15:18 | 15° | 10 | 0.004 m | 0.64 m | 1.4 | |
| 9 | 13:05–13:35 | 15° | 10 | 0.006 m | 0.70 m | 1.3 | |
| 10 | 13:00–13:30 | 40° | 6 | 0.004 m | 0.60 m | 3.9 |
| Baseline | 37 km | 256 km | ||
|---|---|---|---|---|
| Session No. | 1 | 2 | 6 | 7 |
| Phase-code method | 5 s | 96 s | 187 s | 342 s |
| Phase-only method | 2 s | 2 s | 109 s | 127 s |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chu, F.-Y.; Yang, M. BeiDou System (BDS) Triple-Frequency Ambiguity Resolution without Code Measurements. Remote Sens. 2018, 10, 675. https://doi.org/10.3390/rs10050675
Chu F-Y, Yang M. BeiDou System (BDS) Triple-Frequency Ambiguity Resolution without Code Measurements. Remote Sensing. 2018; 10(5):675. https://doi.org/10.3390/rs10050675
Chicago/Turabian StyleChu, Feng-Yu, and Ming Yang. 2018. "BeiDou System (BDS) Triple-Frequency Ambiguity Resolution without Code Measurements" Remote Sensing 10, no. 5: 675. https://doi.org/10.3390/rs10050675
APA StyleChu, F. -Y., & Yang, M. (2018). BeiDou System (BDS) Triple-Frequency Ambiguity Resolution without Code Measurements. Remote Sensing, 10(5), 675. https://doi.org/10.3390/rs10050675