As previously stated, the 1° radar bin (azimuth-range cell for a given angle of elevation) has a high resolution range (83.33 m); its spectral and polarimetric characteristics are quantized using 1 byte, except for the differential phase shift, which is quantized with 2 bytes (namely 65,536 values). Hence, the Digital Number (DN) can vary in binary format from 0 to 255 (65,535 in the case of the differential phase shift). In the case of the MeteoSwiss high range resolution data, DN = 0 has no quantitative meaning and instead has a qualitative meaning. In fact, if the Log-transformed ratio between the Signal plus the (unknown) Noise and the (estimated) Noise is smaller than 4 dB, then the echo is considered to be below the Minimum Detectable Signal (MDS). The corresponding radar bin is assumed to be WITHOUT (detectable) precipitation, and its DN is set to 0. More details regarding the physical meaning of the moments used in this study (as well as their quantization) can be found in the following six Subsections.
2.2.1. Horizontal (H) and Vertical (V) Radar Reflectivity (0th Doppler Moment)
As mentioned in
Section 2.2, a high-range-resolution reflectivity value is coded as long as
where the numerator represents the power (I
2 + Q
2) of the Signal plus the (unknown) Noise of the current bin, and the denominator is an estimate (performed every 2.5 min) of the Noise performed at high Elevation angles (40° and 35°, see Figure 2 in Reference [
16]). In other words, the measured power (Signal plus the unknown Noise) will be at least 2.512 times the estimated Noise that will be recorded as a quantitative value. If not, the radar bin is assumed to be without any (detectable) precipitation and DN is set to 0 (flag value). Let us suppose that the estimate of the Noise is close to the actually measured value: this means that the net Signal should be at least 1.512 times the Noise. As far as quantization is concerned, a value of 0.5 dBZ has been chosen by MeteoSwiss. The linear conversion from DN to Log-transformed radar reflectivity is the following
where the radar reflectivity units,
Z, are [
Z] = mm
6/m
3, while
Z1 (
Z1 = 1 mm
6/m
3) is the normalization factor necessary to Log-transform
Z into the so-called dBZ unit, which, in formula form, is:
In practice, the maximum recorded value for the Monte Lema radar very rarely exceeds 85 dBZ (DN = 234), while DN = 14 (−25 dBZ) can, in principle, only be observed within a range of 3 km or closer (already at the edge of the T-R limiter effects).
2.2.4. Differential (Horizontal/Vertical) Radar Reflectivity
A first polarimetric observable that can be measured by the MeteoSwiss dual-polarization radar is the differential radar reflectivity,
Zdr. This is the Log-transformed ratio between the copolar reflectivity measured at the horizontal,
ZH, and vertical,
ZV, polarizations; hence, it is expressed in dB, and a
Zdr of 0 dB means that
ZH =
ZV. In formula form:
This ratio was introduced by Seliga and Bringi [
18] to obtain a better estimate of rainfall, since it contributes to reducing the uncertainty associated with rain drop size distributions. In fact, the additional information associated with
Zdr is remarkable; however, a proper calibration is crucial for successful quantitative applications. Illingworth [
19], for instance, showed that
Zdr should be estimated within 0.2 dB to obtain improved rainfall estimates based on
Z and
Zdr. It is possible to use the so-called birdbath scan (angle of elevation of 90°) on rainy days when the altitude of the 0° isotherm is high enough to be outside the range that is affected negatively by the T-R limiter recovery time to monitor the differential reflectivity backscattered by liquid drops (
Zdr should be 0 dB). Another (more uncertain approach) is to derive the mean differential reflectivity value of light rain echoes (for example, 20
≤ ZH ≤ 22 dBZ) well below the bright band (which should be around 0.3 dB).
Offline Sun observations acquired while tracking the Sun [
20,
21] are more accurate, but only the receiving chain is monitored, and nothing is therefore known regarding the transmitting path. It is shown in Table 3 (4) in Reference [
13] that the standard deviation of six (seven) Sun tracking observations (performed between 2 November 2013 and 21 March 2016) for the MeteoSwiss Monte Lema (Albis) radar is 0.08 (0.04) dB. An interesting and valid alternative to offline Sun-tracking is the automatic daily “Sun-check” [
10]: this is an operational monitoring technique that is based on the analysis of solar signals in the polar volume radar reflectivity data produced during the operational weather scan program. It has the advantage of the weather radar scan program not being interrupted; the disadvantage is that the antenna beam axis very rarely hits the center of the Sun: consequently, the Sun-to-Noise ratio of each hit can be significantly worse than for Sun tracking. This is partly compensated for by the fact that only one estimate out of many daily hits is retrieved. In Reference [
11] (Table 4), the standard deviation of the daily differential reflectivity during an active solar period in 2014 was 0.06 dB for Monte Lema (220 days) and 0.05 dB for the Albis radar (204 days); the dispersion of the difference between H and V during the same set of 100 days in 2014 was 0.06 dB for Albis and 0.08 dB for the Finish ANJ radar (see Table 3 in Reference [
22]). In a recent manuscript that reviews several aspects of the monitoring of dual-polarization receiver using solar hits found in operational scans [
12], a dispersion as low as 0.02 dB was found for ANJ. These figures refer to a shorter period, namely April 2015. If the antenna is not in an environment with small changes in Temperature, then differential reflectivity can easily vary by a few tens of dB [
23]: in Figures 4 and 5, page 1890, in Reference [
23], it is shown that a 23 K change in temperature (lasting 8 h) occurred at the S-band Firestone site (on 15 January 2015) and a 0.2 dB drift in
Zdr was observed.
Regarding the quantization process, it is worth noting that differential reflectivity is only defined on condition the inequality in (1) is satisfied for both the H and V polarizations. If not, DN is set to 0. The number of radar bins that contain a valid value of differential reflectivity is obviously smaller than for the H or V reflectivity (however, it could be at least the same). In the quantization process based on 255 values the resolution is 15.751/255 ≅ 0.062 dB.
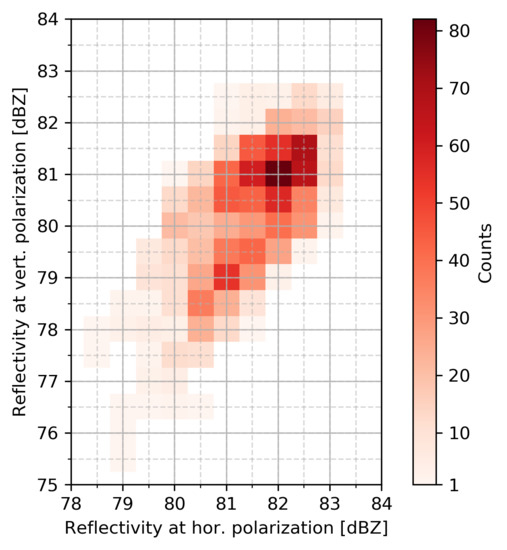
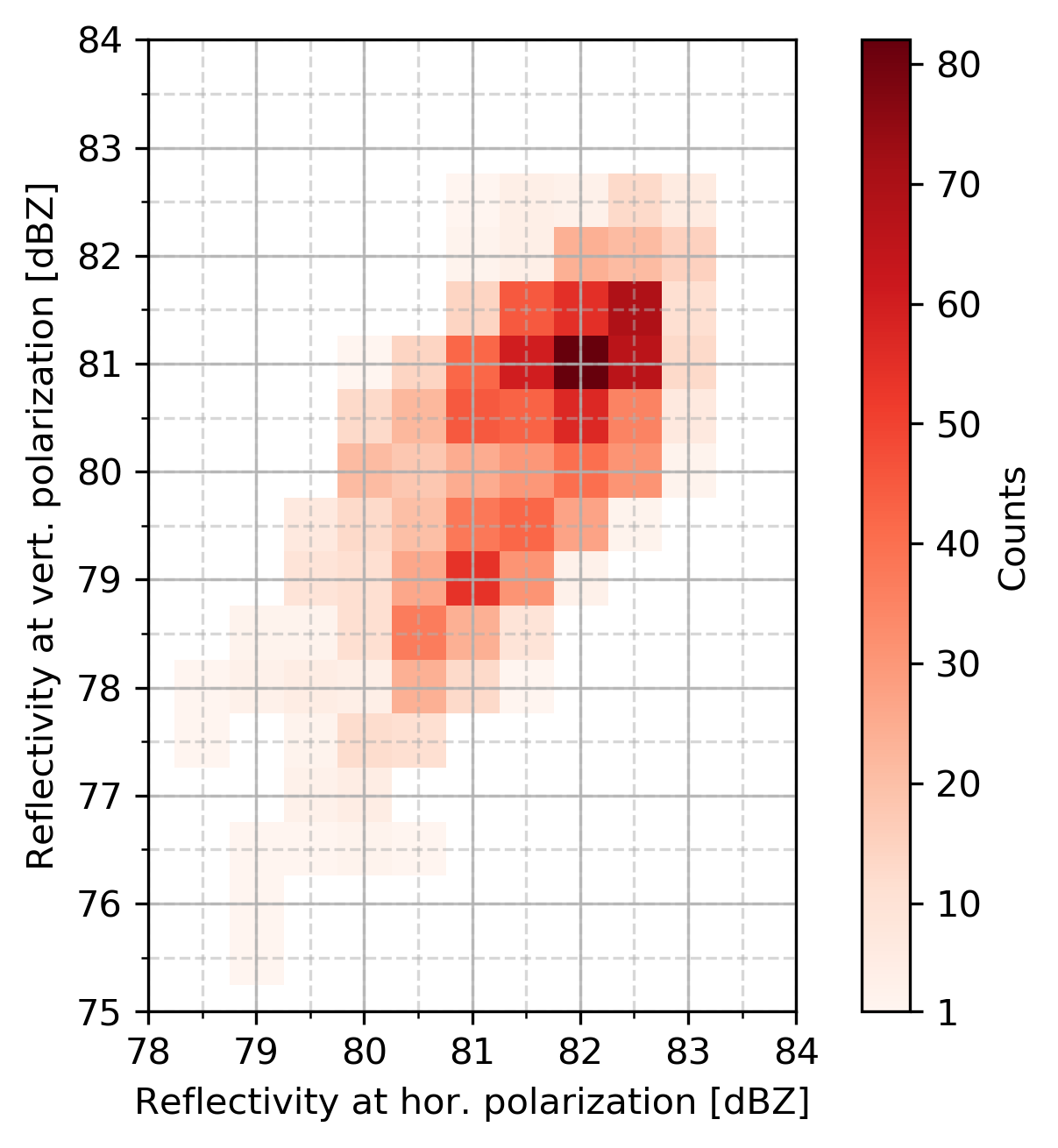
All the values outside the above-defined range of 15.751 dB are left- or right-saturated. Since ZVdBZ is also saved in the MeteoSwiss archive (in addition to Zdr and ZdBZ), the user can retrieve the original, non-saturated value by simply subtracting ZVdBZ from ZHdBZ; obviously, in this case, the derived value only has a resolution of 0.5 dB, as can be seen from Equation (2).
2.2.5. The Copolar Correlation Coefficient
Another quantity measured by the dual-polarization radar is the correlation between the copolar horizontal,
HH, and the vertical,
VV, returns, which is called the copolar correlation coefficient (often referred to as
ρHV or
ρco). However, describing the rather complicated nature of this variable is beyond the scope of this note. On the one hand, any reader that is interested may refer to the electronic supplement (e06.1) that accompanies the book by Fabry [
24]; on the other hand, the detailed treatment of the physics and use of polarimetric quantities has been the subject of entire books, e.g., Bringi e Chandrasekar [
25]. The copolar correlation coefficient is the module of the complex correlation coefficient between two orthogonal components (represented by two complex numbers) of the backscattered electromagnetic field within the radar sampling volume: hence, it ranges from 0 (no correlation between the two polarizations) to 1 (perfect correlation). In general, if the sampling volume contains a significant number of ground targets, then, in most cases,
ρHV ranges from 0.75 to 0.95, for example. However, for the bright scatterer in Cimetta that will deal with in the
Section 3, the median of the five daily values is as large as 0.9972. A maximum value of 0.9998 has been observed.
Regarding the 1-byte quantization, a considerable resolution is attributed (through a logarithmic transformation) to values of
ρHV close to 1; hence, low values of
ρHV are compressed into a few Digital Numbers. The corresponding conversion formula from DN to
ρHV is:
DN = 0 corresponds to
ρHV = 0, while DN = 255 is obviously not possible.
2.2.6. The Differential Phase Shift between the Two Orthogonal Polarizations
A third polarimetric quantity measured by the MeteoSwiss radars is the differential phase shift, Ψdp, between the phase of the copolar signal at the horizontal and vertical polarizations, respectively. This difference between the two orthogonal polarization phases arises from two sources:
a difference in the delay introduced by the scattering of the transmitted wave, which is known as the backscattering phase delay, δco;
a difference in the forward propagation velocity of the two polarizations, which is known as the differential propagation phase, Фdp.
In formula form, the differential phase shift, Ψ
dp, at any given range, is:
which is the sum of the backscattering phase delay of the targets at that range; the two-way differential propagation phase that occurred when propagating from the radar to the observed target and then back to the radar; an offset value Ψ
0, which is the phase difference between the transmitted and received vertically and horizontally polarized waves at the zero range. This constant value depends on the hardware components and design of the radar; at MeteoSwiss, this value was set close to 0° through a post-facto software adjustment (and it is monitored to ensure it remains constant).
As stated in
Section 2.2, the differential phase shift is the only radar observable that is quantized using two bytes. The DN in binary form ranges from 1 to 65,535; DN = 0 is not used. The conversion formula from DN to the value of Ψ
dp, which is expressed in degrees, is:




{kind=link}
{kind=link}