Towards Global-Scale Seagrass Mapping and Monitoring Using Sentinel-2 on Google Earth Engine: The Case Study of the Aegean and Ionian Seas

 ,
,  ,
,  ,
,  and
and 
Abstract
:
1. Introduction
2. Materials and Methods
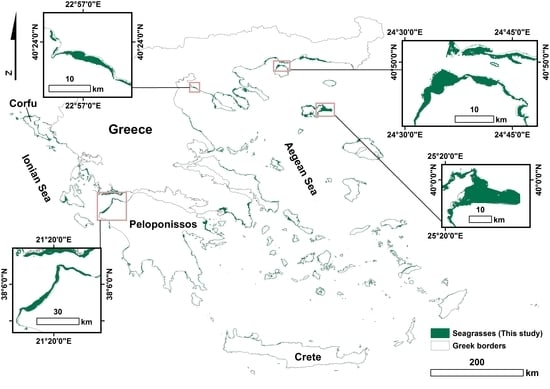
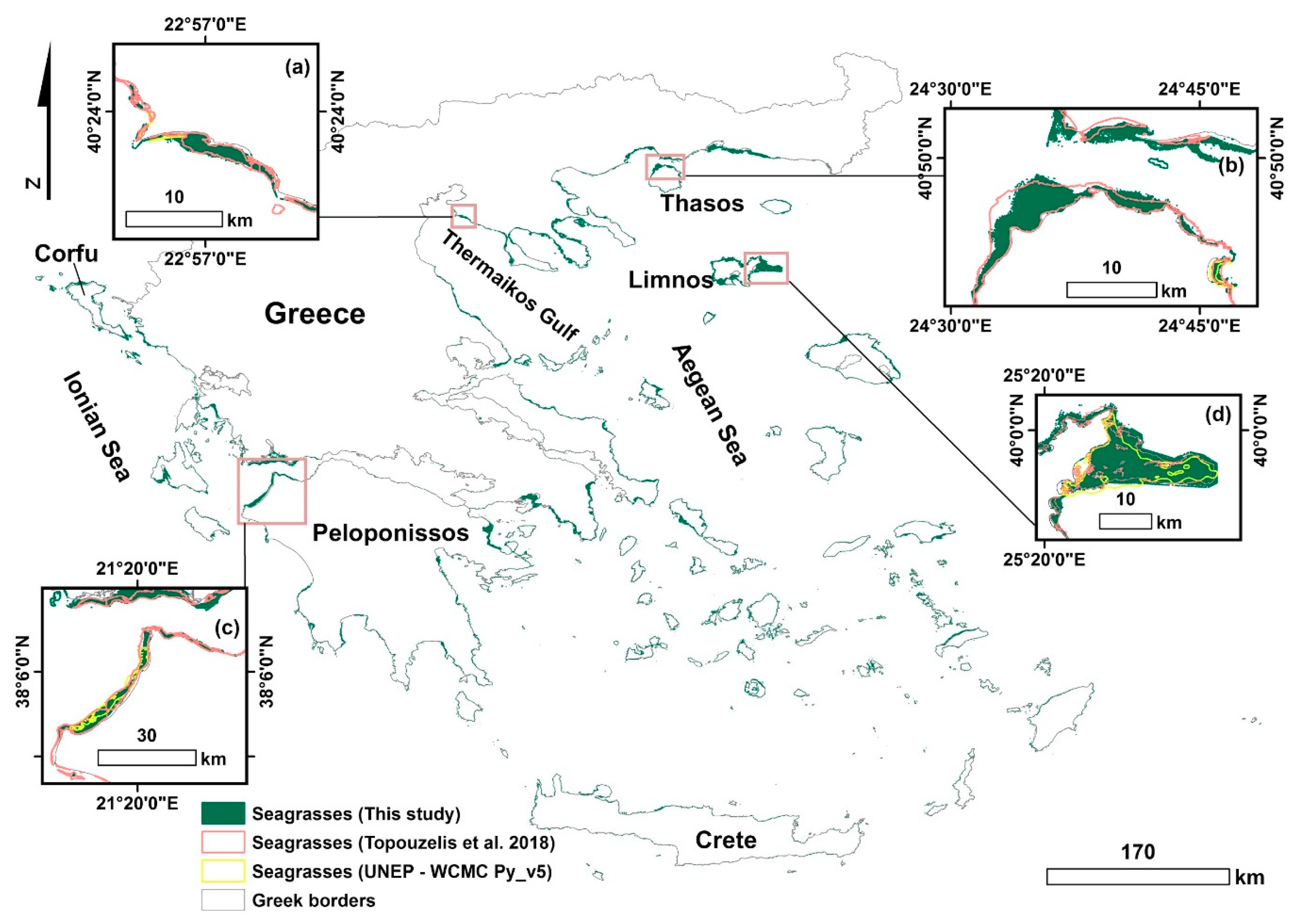
2.1. Study Site
2.2. Satellite Data
2.3. Field Data
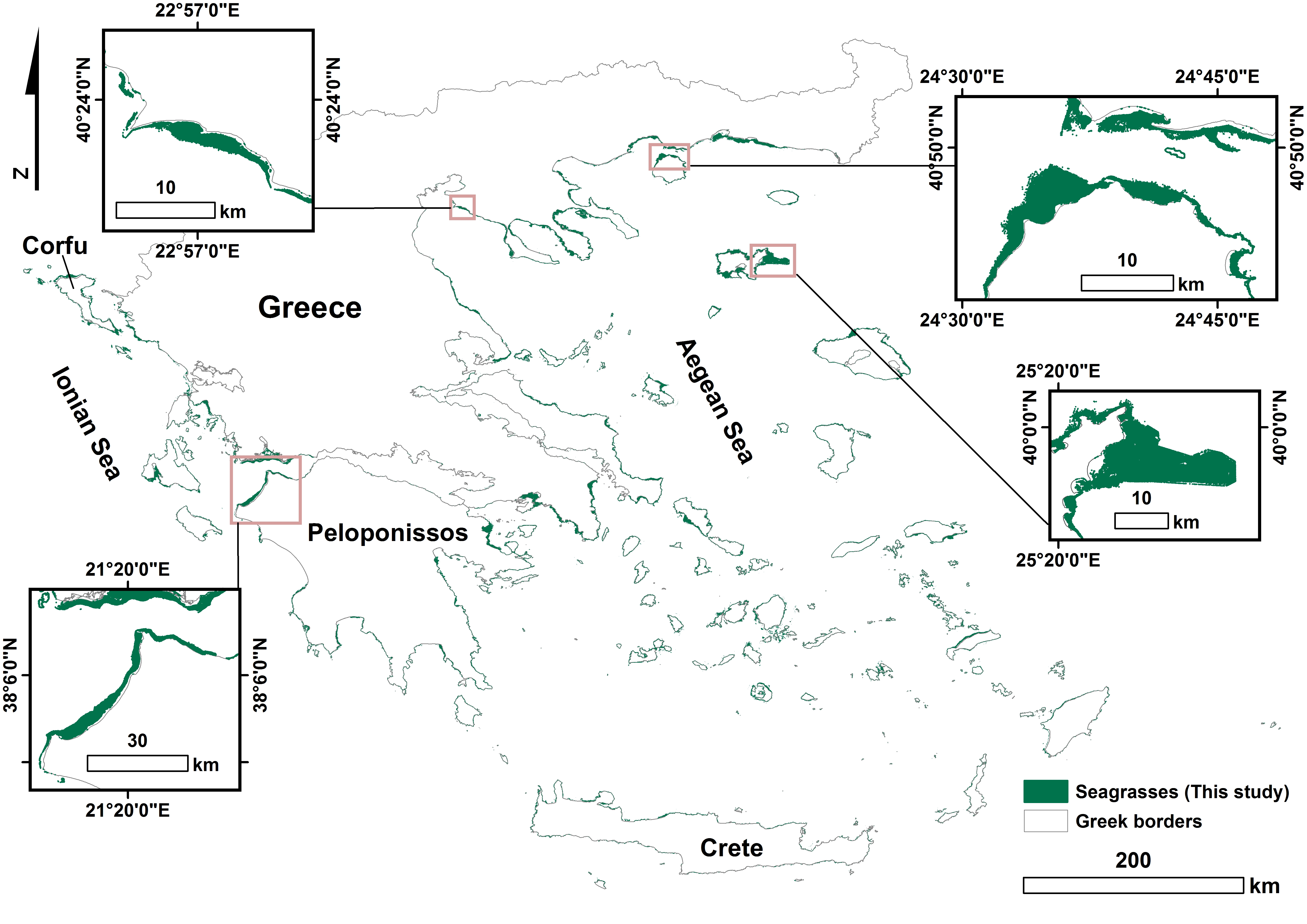
2.3.1. Training and Validation Data
2.3.2. Auxiliary Data
2.4. Methodology
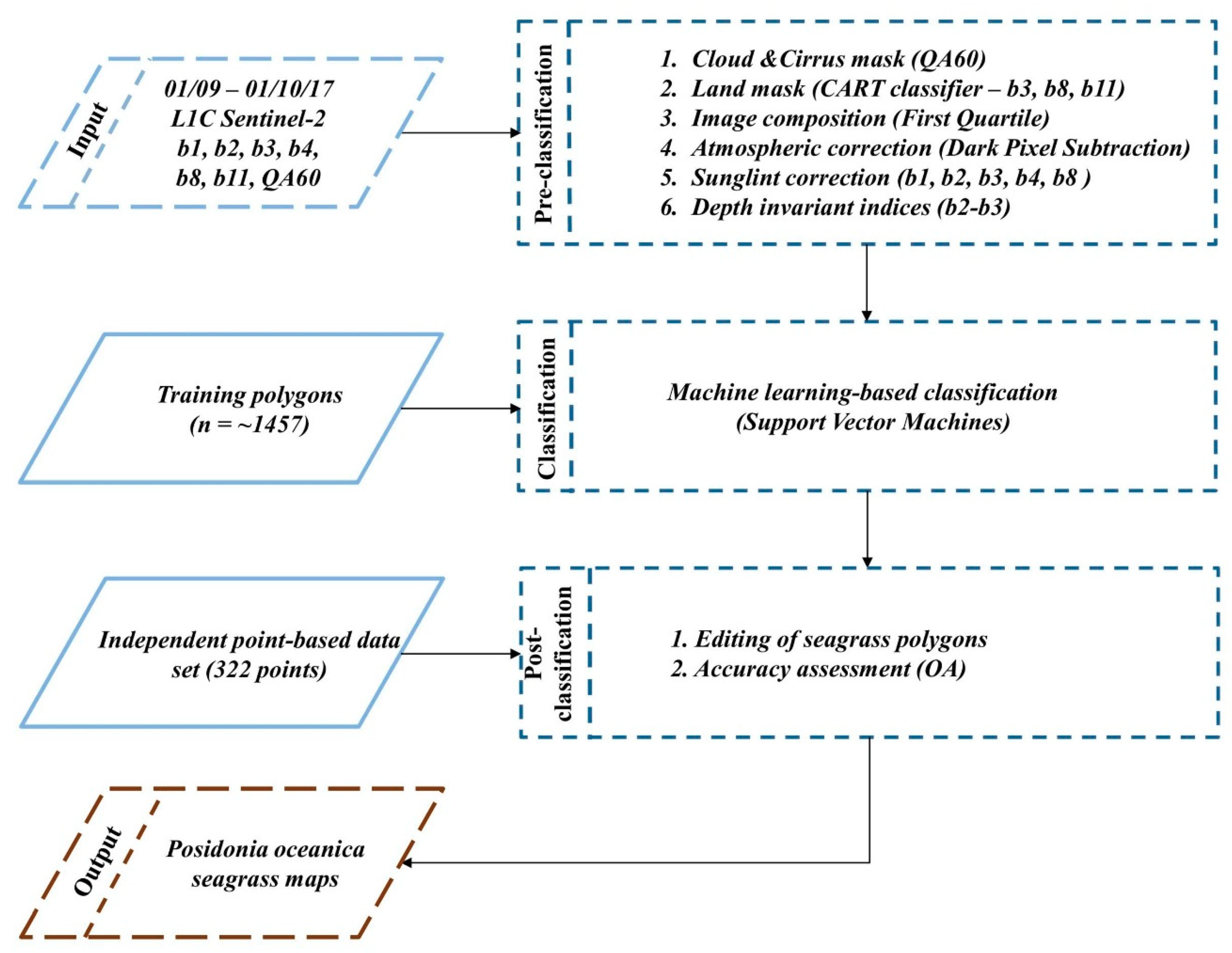
2.4.1. Preclassification
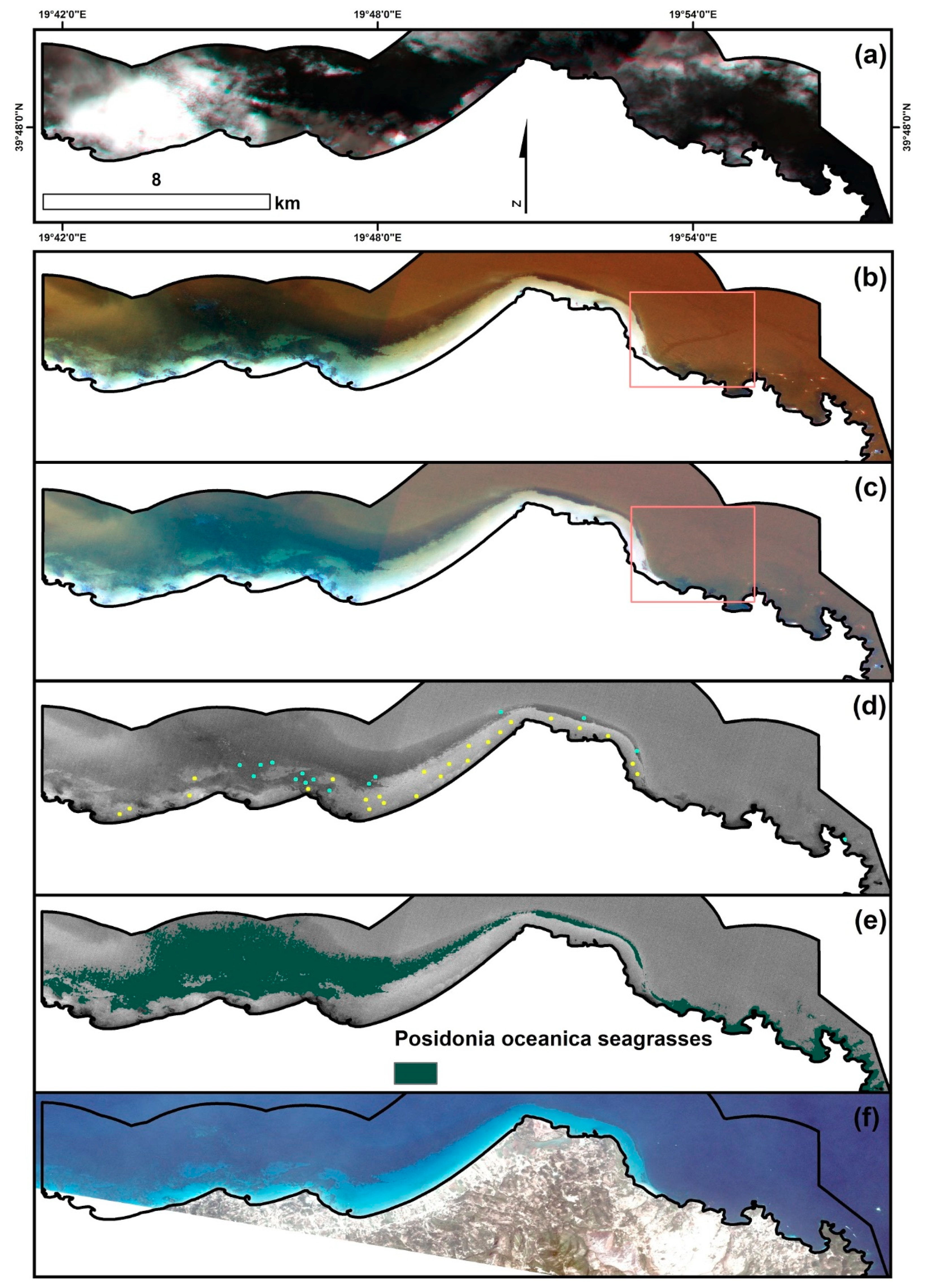
- Cloud mask: We use the QA60 bitmask band to mask opaque and cirrus clouds and scale S2 L1C TOA images by 10,000 (Figure 4a,b).
- Land mask: Although here we utilize the buffered coastline shapefile of Greek waters to mask out terrestrial Greece, we include a classification and regression tree (CART) classifier [23] in the GEE code that future users could employ to mask out their terrestrial part. The classifier is applied on a b3-b8-b11 composite and the user should train it with relevant pixels over land and water.
- Image composition: We apply image composition which yields a new pseudo-image composite whose pixels are the first quartile (Q1) of the median values of the cloud corrected and masked for land images of step 2. The purpose of this approach is to decrease noncorrected image artefacts by the previous steps.
- Sunglint correction: We further correct the atmospherically corrected image composites with the sunglint correction algorithm of [25]. Following a user-defined set of pixels of variable sunglint intensity, the algorithms equals the corrected for sunglint composite to the initial first quartile composite minus the product of the regression slope of b8 against b1-b4 and the difference between b8 and its minimum value (Figure 4c).
- Depth invariant indices calculation: To compensate the influence of variable depth on seabed habitats, we derive the depth invariant indices [26,27] for each pair of bands with reasonable water penetration (b1-b2, b2-b3, b1-b3) with the statistical analysis of [28]. Prior to the machine learning-based classification, we apply a 3 × 3 low pass filter in the depth invariant as well as the sunglint-corrected input to minimize remaining noise over the optically deep water extent which would have caused misclassified seagrass pixels otherwise (Figure 4d).
2.4.2. Classification
2.4.3. Post-Classification
3. Results
3.1. Preclassification
3.2. Classification
3.3. Post-Classification
4. Discussion
4.1. On Global Mapping and Monitoring of Seagrasses, and the Results of the Present Case Study
4.2. The Good, the Bad, and the Best Practices of the Proposed Cloud-Based Workflow
- (a)
- Selection of a suitable time range; the suitability relates to possible available in situ data to run the machine learning classifiers, the atmospheric, water surface and column conditions of the study area, but also the season of maximum growth of the seagrass species of interest, especially for change detection studies. Here, we have chosen one month of Sentinel-2 imagery within the period of better water column stratification of the Greek Seas.
- (b)
- Selection of suitable points that will represent land and water for land masking (if needed), polygons over deep water (for atmospheric correction), variable sunglint intensity (for sunglint correction), and sandy seabed of variable depth (for the depth invariant index calculation).
- (c)
- Accurate in situ data that will cover all the existing habitats within the study extent for training of the machine learning classifications and validation with an ideally independent data set to reduce potential bias; here, we design remotely sensed, homogenous 4 × 4 (1600 m2) polygons for the training of the machine learning model and employ an independent point-based data set for the validation. We also decided to design deep-water polygons to minimize possible misclassifications with seagrasses.
- Method-wise, the herein image-based, empirical algorithms (e.g., dark pixel subtraction, sunglint correction, depth invariant indices) contain inherent assumptions in their nature and necessitate a sufficient selection of pixels to produce valuable results. Concerning the sunglint correction, specifically, an image composition spanning a large period of time can amplify the artificiality of the produced pseudo-composite, causing the sunglint correction algorithm to be unable to capture any existing interference by this phenomenon.
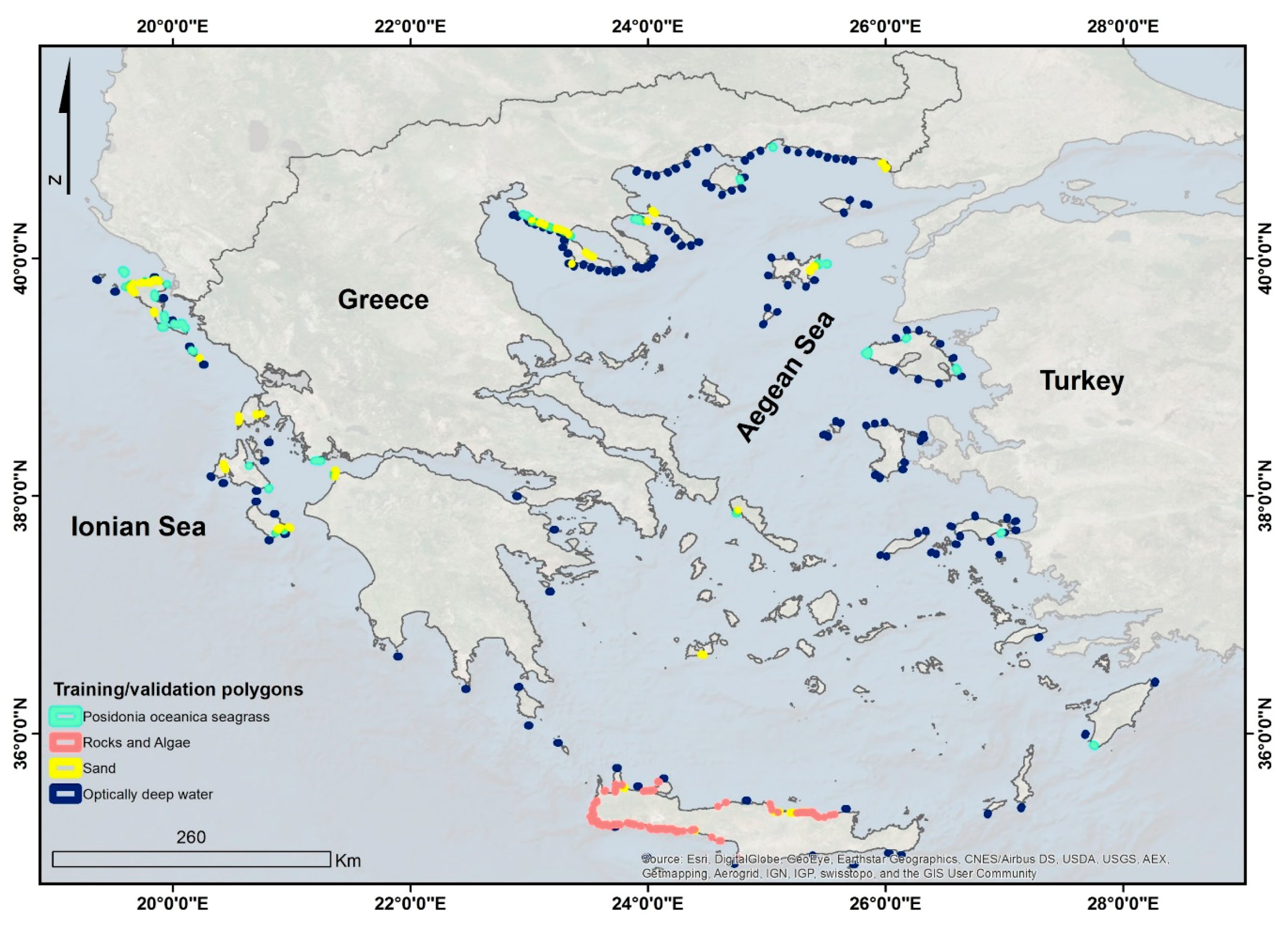
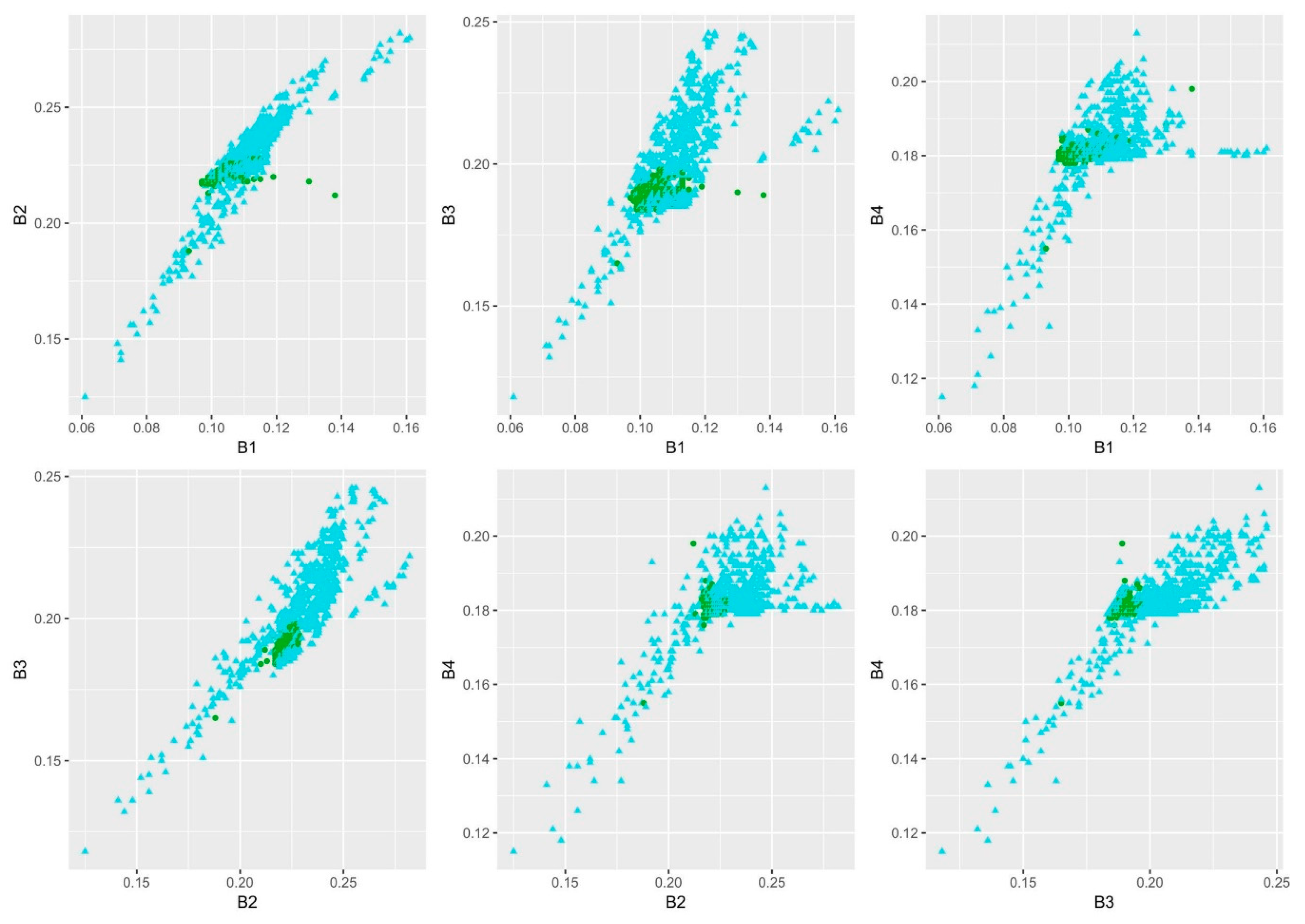
- Data-wise, there is a threefold problem with Sentinel-2 applications in the remote sensing of optically shallow benthos and broadly aquatic extent. First, the tile limits of Sentinel-2 data are visible due to differences in viewing angles (odd and even detectors feature a different viewing angle) that produce striping. In turn, this artifact could severely impact classification output as it alters neighboring reflectances. A first possible solution for striping could be the application of pseudo-invariant feature normalization using a tile as a reference image and all the others as the slave ones—a theoretically, computationally expensive operation within GEE. A second solution is to split the initial study area into subareas—ultimately every tile within the visible stripes—where we could select polygons and run the classifier. The second data-related issue is the coastal aerosol band 1, which is originally in 60-m resolution in comparison to the 10-m resolution of all the other visible bands. Although on-the-fly reprojected to 10-m for visual purposes and integral towards coastal habitat mapping and SDB due to its great penetration, it causes artefacts upon application of the depth invariant indices of [26,27]. Therefore, we only utilise b2-b3 index during the classification step. This could be solved through the implementation of a downscaling approach of band 1 [37] into the existing workflow which is under exploration in terms of computation time efficiency. The third and last data-wise issue is the selection of training and validation data. We designed as homogeneous as possible polygons that represent seagrasses, sands, rocks, and deep water based on very high spatial resolution images; however, these will be as accurate as our experienced eye will dictate to us. Figure 2 shows that at all band-to-band scatterplots, the designed polygons of seagrass and non-seagrass beds are not well-differentiated and may have caused misclassifications. Generally, the collection of field data for the classification of remote sensing of aquatic habitats is expensive, time-consuming, and sparse today. More efforts should be driven towards allocating funding for accurate and high resolution in situ data and/or advocating the sharing of open datasets that would permit regional to global projects. The search for open access data on seagrass from relevant data repositories reveals a high number, however a fraction of these are potentially suitable for use in the remote sensing domain. Therefore, it is mandatory to urge a collaborative action between seagrass and remote sensing scientists, which will galvanize the development of a protocol that could be easily adapted in any seagrass bioregion for the designation of accurate and well documented with metadata, in situ data for seagrass mapping using the present workflow.
4.3. Future Endeavours
- Basin- (Mediterranean) to global-scale mapping and monitoring of seagrasses and related biophysical variables (specifically the climate change-related carbon sequestration): The expected lifespan of Sentinel-2 and its succeeding complementary twin mission (7.25 + 7.25 years) would unravel issues related to open and free, high spatial resolution data availability and allow intra-annual (seasonal) to interannual monitoring activities in the optically shallow grounds of seagrasses for 14.5 years by 2029, which marks the end of the announced UN decade of ocean science [38].
- Improvement of certain stages of the present workflow: (a) Incorporation of a more sophisticated atmospheric correction algorithm like Py6S [39], (b) Implementation of optimization approaches for simultaneous derivation of benthic reflectance and bathymetry based on the semianalytical inversion model of [40,41], (c) Inclusion of best available pixel (BAP) approach within span of well-stratified column period which use pixel-based scores, according to both atmospheric-, season- and sensor-related issues, to produce a composite with the best available pixel [42], (d) Incorporation of object-based segmentation and classification methods to improve classified outputs. The main drawback of the first three improvements is they would possibly lower the time efficiency of the present version of the chain due to the higher demand in computational power based on the need to implement look up tables and/or run radiative transfer codes.
- Integration of seagrasses and other coastal habitats to the analysis ready data (ARD) era: Recent advances in optical multispectral remote sensing (e.g., Sentinel-2, Landsat 8, Planet’s Doves), cloud computing and machine learning classifiers can enable multiscale, multitemporal and sensor-agnostic approaches where all the aforementioned data will be preprocessed to a high scientific standard (Cloud Optimized GeoTIFF; [43]), further harnessing past, present and future remotely sensed big data and facilitating the near real-time measurements of physical changes of these immensely valuable habitats for Earth.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Short, F.T.; Dennison, W.C.; Carruthers, T.J.B.; Waycott, M. Global seagrass distribution and diversity: A bioregional model. J. Exp. Mar. Biol. Ecol. 2007, 350, 3–20. [Google Scholar] [CrossRef]
- Green, E.P.; Short, F.T. World Atlas of Seagrasses; University of California Press: Berkeley, CA, USA, 2003. [Google Scholar]
- Duarte, C.M.; Borum, J.; Short, F.T.; Walker, D.I. Seagrass Ecosystems: Their Global Status and Prospects. In Aquatic Ecosystems: Trends and Global Prospects; Polunin, N., Ed.; Cambridge University Press: Cambridge, UK, 2008. [Google Scholar] [CrossRef]
- Nordlund, M.L.; Koch, E.W.; Barbier, E.B.; Creed, J.C. Seagrass Ecosystem Services and Their Variability across Genera and Geographical Regions. PLoS ONE 2016, 11, e0163091. [Google Scholar] [CrossRef] [PubMed]
- Githaiga, M.N.; Kairo, J.G.; Gilpin, L.; Huxham, M. Carbon storage in the seagrass meadows of Gazi Bay, Kenya. PLoS ONE 2017, 12, e0177001. [Google Scholar] [CrossRef] [PubMed]
- Fourqurean, J.W.; Duarte, C.M.; Kennedy, H.; Marbà, N.; Holmer, M.; Mateo, M.A.; Apostolaki, E.T.; Kendrick, G.A.; Krause-Jensen, D.; McGlathery, K.J.; et al. Seagrass ecosystems as a globally significant carbon stock. Nat. Geosci. 2012, 5, 505–509. [Google Scholar] [CrossRef]
- UN General Assembly, Transforming Our World: The 2030 Agenda for Sustainable Development. 21 October 2015. Available online: http://www.refworld.org/docid/57b6e3e44.html (accessed on 3 August 2018).
- Waycott, M.; Carlos, M.D.; Carruthers, T.J.B.; Orth, R.J.; Dennison, W.C.; Olyarnik, S.; Calladine, A.; Fourqurean, J.W.; Heck, K.L.J.; Hughes, A.R.; et al. Accelerating loss of seagrasses across the globe threatens coastal ecosystems. Proc. Natl. Acad. Sci. USA 2009, 106, 12377–12381. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Orth, R.J.; Carruthers, T.J.; Dennison, W.C.; Duarte, C.M.; Fourqurean, J.W.; Heck, K.L.; Hughes, A.R.; Kendrick, G.A.; Kenworthy, W.J.; Olyarnik, S.; et al. A global crisis for seagrass ecosystems. Bioscience 2006, 56, 987–996. [Google Scholar] [CrossRef]
- Hossain, M.S.; Bujang, J.S.; Zakaria, M.H.; Hashim, M. The application of remote sensing to seagrass ecosystems: An overview and future research prospects. Int. J. Remote Sens. 2015, 36, 61–114. [Google Scholar] [CrossRef]
- Hedley, J.D.; Roelfsema, C.M.; Chollett, I.; Harborne, A.R.; Heron, S.F.; Weeks, S.; Skirving, W.J.; Strong, A.E.; Eakin, C.M.; Christensen, T.R.L.; et al. Remote Sensing of Coral Reefs for Monitoring and Management: A Review. Remote Sens. 2016, 8, 118. [Google Scholar] [CrossRef]
- Wabnitz, C.; Andréfouët, S.; Torres-Pulliza, D.; Müller-Karger, F.; Kramer, P. Regional-scale seagrass habitat mapping in the wider Caribbean region using Landsat sensors: Applications to conservation and ecology. Remote Sens. Environ. 2008, 112, 3455–3467. [Google Scholar] [CrossRef]
- Topouzelis, K.; Makri, D.; Stoupas, N.; Papakonstantinou, A.; Katsanevakis, S. Seagrass mapping in Greek territorial waters using Landsat-8 satellite images. Int. J. Appl. Earth Obs. Geoinform. 2018, 67, 98–113. [Google Scholar] [CrossRef]
- Roelfsema, C.M.; Kovacs, E.; Phinn, S.R.; Lyons, M.; Saunders, M.; Maxwell, P. Challenges of Remote Sensing for Quantifying Changes in Large Complex Seagrass Environments. Estuar. Coast. Shelf Sci. 2013, 133, 161–171. [Google Scholar] [CrossRef]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-Resolution Global Maps of 21st-Century Forest Cover Change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [PubMed]
- Xiong, J.; Thenkabail, P.S.; Gumma, M.K.; Teluguntla, P.; Poehnelt, J.; Congalton, R.G.; Yadav, K.; Thau, D. Automated cropland mapping of continental Africa using Google earth engine cloud computing. ISPRS J. Photogramm. Remote Sens. 2017, 126, 225–244. [Google Scholar] [CrossRef]
- Pekel, J.F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef] [PubMed]
- Traganos, D.; Poursanidis, D.; Aggarwal, B.; Chrysoulakis, N.; Reinartz, P. Estimating Satellite-Derived Bathymetry (SDB) with the Google Earth Engine and Sentinel-2. Remote Sens. 2018, 10, 859. [Google Scholar] [CrossRef]
- Sini, M.; Katsanevakis, S.; Koukourouvli, N.; Gerovasileiou, V.; Dailianis, T.; Buhl-Mortensen, L.; Damalas, D.; Dendrinos, P.; Dimas, X.; Frantzis, A.; et al. Assembling Ecological Pieces to Reconstruct the Conservation Puzzle of the Aegean Sea. Front. Mar. Sci. 2017, 4. [Google Scholar] [CrossRef] [Green Version]
- Casotti, R.; Landolfi, A.; Brunet, C.; Ortenzio, F.D.; Mangoni, O.; Ribera d’Alcala, M. Composition and dynamics of the phytoplankton of the Ionian Sea (eastern Mediterranean). J. Geophys. Res. 2003, 108. [Google Scholar] [CrossRef] [Green Version]
- Gerakaris, V.; Panayotidis, P.; Tsiamis, K.; Nikolaidou, A.; Economou-Amili, A. Posidonia oceanica meadows in Greek seas: Lower depth limits and meadow densities. In Proceedings of the 5th Mediterranean Symposium on Marine Vegetation, Portorož, Slovenia, 27–28 October 2014. [Google Scholar]
- HNHS. Greek Coastline at Scale 1:90,000. 2018. Available online: https://www.hnhs.gr/en/?option=com_opencart&Itemid=268&route=product/product&path=86&producp_id=271 (accessed on 3 August 2018).
- Breiman, L.; Friedman, J.H.; Olshen, R.A.; Stone, C.J. Classification and Regression Trees. In Chapman and Hall/CRC; CRC Press: Boca Raton, FL, USA, 1984. [Google Scholar]
- Armstrong, R.A. Remote sensing of submerged vegetation canopies for biomass estimation. Int. J. Remote Sens. 1993, 14, 621–627. [Google Scholar] [CrossRef]
- Hedley, J.D.; Harborne, A.R.; Mumby, P.J. Technical note: Simple and robust removal of sun glint for mapping shallow-water benthos. Int. J. Remote Sens. 2005, 26, 2107–2112. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Passive remote sensing techniques for mapping water depth and bottom features. Appl. Opt. 1978, 17, 379–383. [Google Scholar] [CrossRef] [PubMed]
- Lyzenga, D.R. Remote sensing of bottom reflectance and water attenuation parameters in shallow water using aircraft and Landsat data. Int. J. Remote Sens. 1981, 2, 71–82. [Google Scholar] [CrossRef]
- Green, E.P.; Mumby, P.J.; Edwards, A.J.; Clark, C.D. Remote Sensing Handbook for Tropical Coastal Management; UNESCO Press: Paris, France, 2000; pp. 1–316. [Google Scholar]
- Vapnik, V. The Nature of Statistical Learning Theory; Springer Press: New York, NY, USA, 1995. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Zhang, C. Applying data fusion techniques for benthic habitat mapping and monitoring a coral reef ecosystem. ISPRS J. Photogramm. Remote Sens. 2015, 104, 213–223. [Google Scholar] [CrossRef]
- Traganos, D.; Reinartz, P. Mapping Mediterranean Seagrasses with Sentinel-2 Imagery. Available online: https://www.sciencedirect.com/science/article/pii/S0025326X17305726 (accessed on 3 August 2018).
- Traganos, D.; Cerra, D.; Reinartz, P. CubeSat-Derived Detection of Seagrasses Using Planet Imagery Following Unmixing-Based Denoising: Is Small the Next Big? Available online: https://www.int-arch-photogramm-remote-sens-spatial-inf-sci.net/XLII-1-W1/283/2017/isprs-archives-XLII-1-W1-283-2017.pdf (accessed on 3 August 2018).
- Poursanidis, D.; Topouzelis, K.; Chrysoulakis, N. Mapping coastal marine habitats and delineating the deep limits of the Neptune’s seagrass meadows using VHR earth observation data. Int. J. Remote Sens. 2018. [Google Scholar] [CrossRef]
- The UN Environment World Conservation Monitoring Centre (UNEP-WCMC). Global Distribution of Seagrasses (Version 5.0). Fourth Update to the Data Layer Used in Green and Short (2003). 2017. Available online: http://data.unep-wcmc.org/datasets/7 (accessed on 3 August 2018).
- Partnership to Develop First-Ever Global Map and Dynamic Map of Coral Reefs. 2018. Available online: https://carnegiescience.edu/node/2354 (accessed on 3 August 2018).
- Brodu, N. Super-Resolving Multiresolution Images with Band-Independent Geometry of Multispectral Pixels. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4610–4617. [Google Scholar] [CrossRef]
- UNESCO. United Nations Decade of Ocean Science for Sustainable Development (2021–2030). 2018. Available online: https://en.unesco.org/ocean-decade (accessed on 3 August 2018).
- Wilson, R. Py6S—A Python Interface to 6S. 2012. Available online: https://py6s.readthedocs.io/en/latest/ (accessed on 3 August 2018).
- Lee, Z.; Carder, K.L.; Mobley, C.D.; Steward, R.G.; Patch, J.S. Hyperspectral remote sensing for shallow waters: 1. A semianalytical model. Appl. Opt. 1998, 37, 6329–6338. [Google Scholar] [CrossRef] [PubMed]
- Lee, Z.; Carder, K.L.; Mobley, C.D.; Steward, R.G.; Patch, J.S. Hyperspectral remote sensing for shallow waters: 2. Deriving bottom depths and water properties by optimization. Appl. Opt. 1999, 38, 3831–3843. [Google Scholar] [CrossRef] [PubMed]
- White, J.C.; Wulder, M.A.; Hobart, G.W.; Luther, J.E.; Hermosilla, T.; Griffiths, P.; Coops, N.C.; Hall, R.J.; Hostert, P.; Dyk, A.; et al. Pixel-based image compositing for large-area dense time series applications and science. Can. J. Remote Sens. 2014, 40, 192–212. [Google Scholar] [CrossRef]
- Cloud Optimized GeoTIFF. An Imagery Format for Cloud-Native Geospatial Processing. 2018. Available online: http://www.cogeo.org/ (accessed on 3 August 2018).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Polygons | Pixels | % |
|---|---|---|---|
| Seagrass | 329 | 5264 | 22.6 |
| Nonseagrass | 1128 | 18,048 | 77.4 |
| Sum | 1457 | 23,312 | 100 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Traganos, D.; Aggarwal, B.; Poursanidis, D.; Topouzelis, K.; Chrysoulakis, N.; Reinartz, P. Towards Global-Scale Seagrass Mapping and Monitoring Using Sentinel-2 on Google Earth Engine: The Case Study of the Aegean and Ionian Seas. Remote Sens. 2018, 10, 1227. https://doi.org/10.3390/rs10081227
Traganos D, Aggarwal B, Poursanidis D, Topouzelis K, Chrysoulakis N, Reinartz P. Towards Global-Scale Seagrass Mapping and Monitoring Using Sentinel-2 on Google Earth Engine: The Case Study of the Aegean and Ionian Seas. Remote Sensing. 2018; 10(8):1227. https://doi.org/10.3390/rs10081227
Chicago/Turabian StyleTraganos, Dimosthenis, Bharat Aggarwal, Dimitris Poursanidis, Konstantinos Topouzelis, Nektarios Chrysoulakis, and Peter Reinartz. 2018. "Towards Global-Scale Seagrass Mapping and Monitoring Using Sentinel-2 on Google Earth Engine: The Case Study of the Aegean and Ionian Seas" Remote Sensing 10, no. 8: 1227. https://doi.org/10.3390/rs10081227
APA StyleTraganos, D., Aggarwal, B., Poursanidis, D., Topouzelis, K., Chrysoulakis, N., & Reinartz, P. (2018). Towards Global-Scale Seagrass Mapping and Monitoring Using Sentinel-2 on Google Earth Engine: The Case Study of the Aegean and Ionian Seas. Remote Sensing, 10(8), 1227. https://doi.org/10.3390/rs10081227