Investigations on the Coregistration of Sentinel-1 TOPS with the Conventional Cross-Correlation Technique


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Coregistration Accuracy of Cross-Correlation Method and Geometrical Method
2.1. Cross-Correlation and Rigid-Transformation
- Performs the cross-correlation between master and slave image using small windows at different locations;
- Performs the maximum likelihood estimation (MLE) on the cross-correlation between master and slave windows to estimate the offsets;
- Estimates the transformation matrix for the slave image based on the calculated offsets at different locations; and
- Performs the rigid transformation based on the estimated transformation matrix.
2.1.1. The Accuracy of Estimating Offsets
2.1.2. The Accuracy of Estimating Transformation Matrix
- The Kronecker product term represents a mutual shift (on azimuth and range) between master and slave image. In InSAR, this shift is mainly due to orbital timing error (azimuth) and perpendicular baseline component (range);
- The transformation matrix D2×2 could include a stretch in range and a rotation that skews both azimuth and range.
2.1.3. Conclusion on Cross-Correlation and Resampling
2.2. The Geometrical Method
3. TOPS Impulse Response Function and Enhanced Spectral Diversity
3.1. TOPS IRF
3.2. Enhanced Spectral Diversity
3.2.1. Introduction to Enhanced Spectral Diversity
3.2.2. 1/1000 Coregistration Accuracy
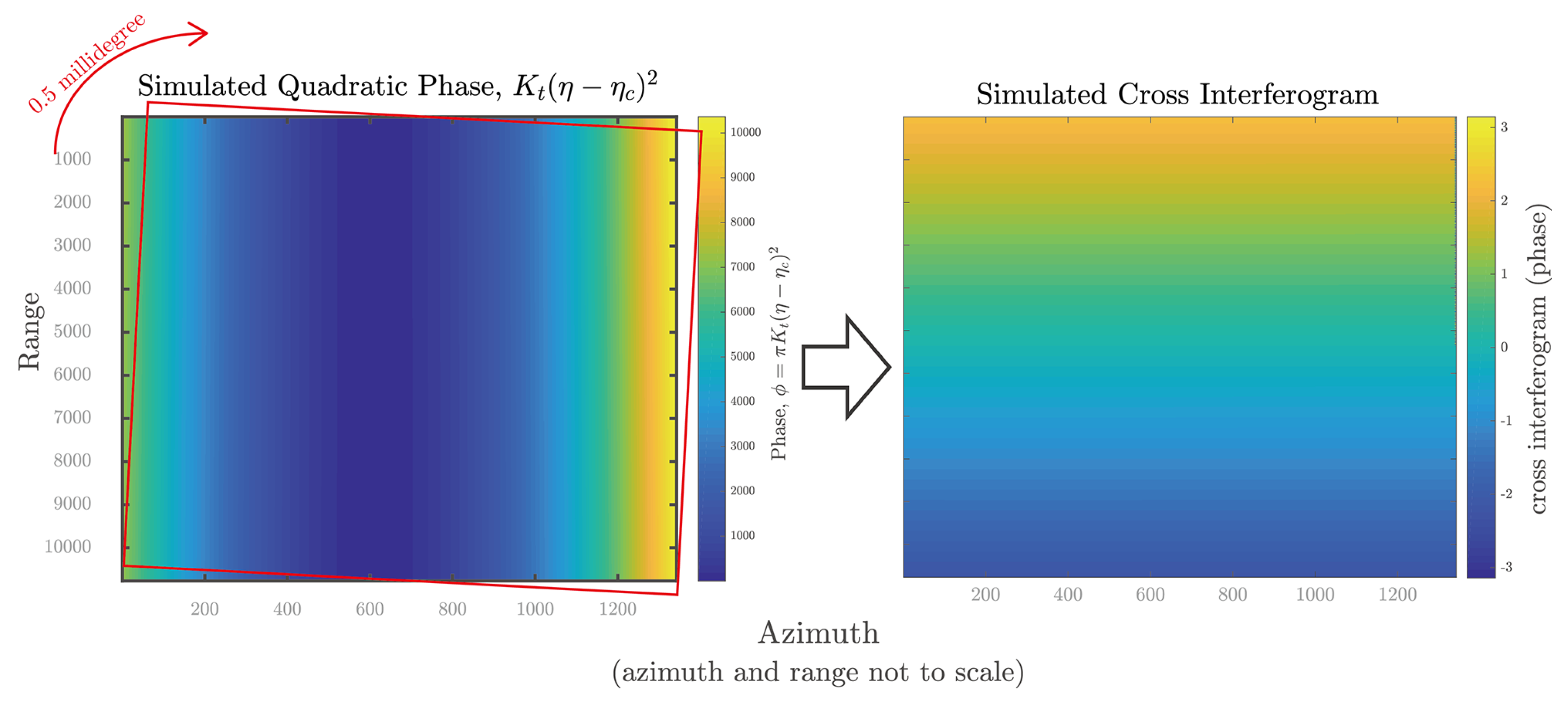
3.2.3. Phase Ambiguity of ESD
4. Evaluation of the Proposed Approach with Test Sites
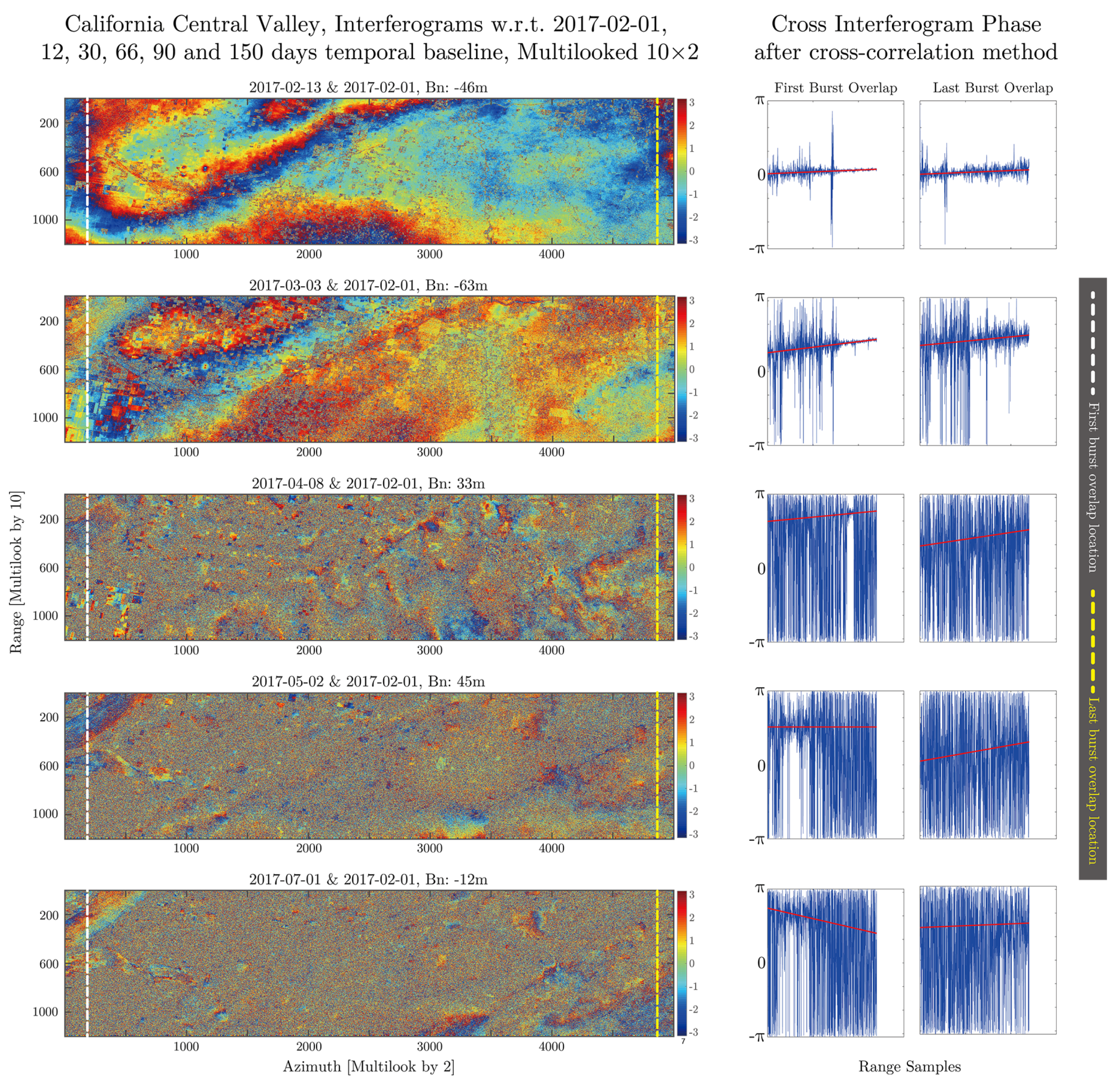
- The first one is to evaluate the coregistration accuracy of the cross-correlation method by checking the cross-interferogram phase in the ESD step. If the cross-correlation method accuracy is low, then the cross-interferogram phase is away from zero. If the cross-correlation method accuracy is high then the cross interferogram phase is close to zero.
- The second point is to check the interferogram phase difference between the proposed approach and the established approach, and here we treat the established approach as the “reference result”. The aim is to test the correctness and robustness of the proposed approach and to understand the conditions for when the proposed approach could apply.
4.1. Introduction to Test Sites
- The first test site is located at the Atacama Desert in northern Chile. The desert is a plateau and is the driest desert in the world. From the InSAR point of view, the site is very coherent. Even interferograms with very long temporal baselines (for example, a few years) could show very high coherence. The idea is to select an ideal case as the first test;
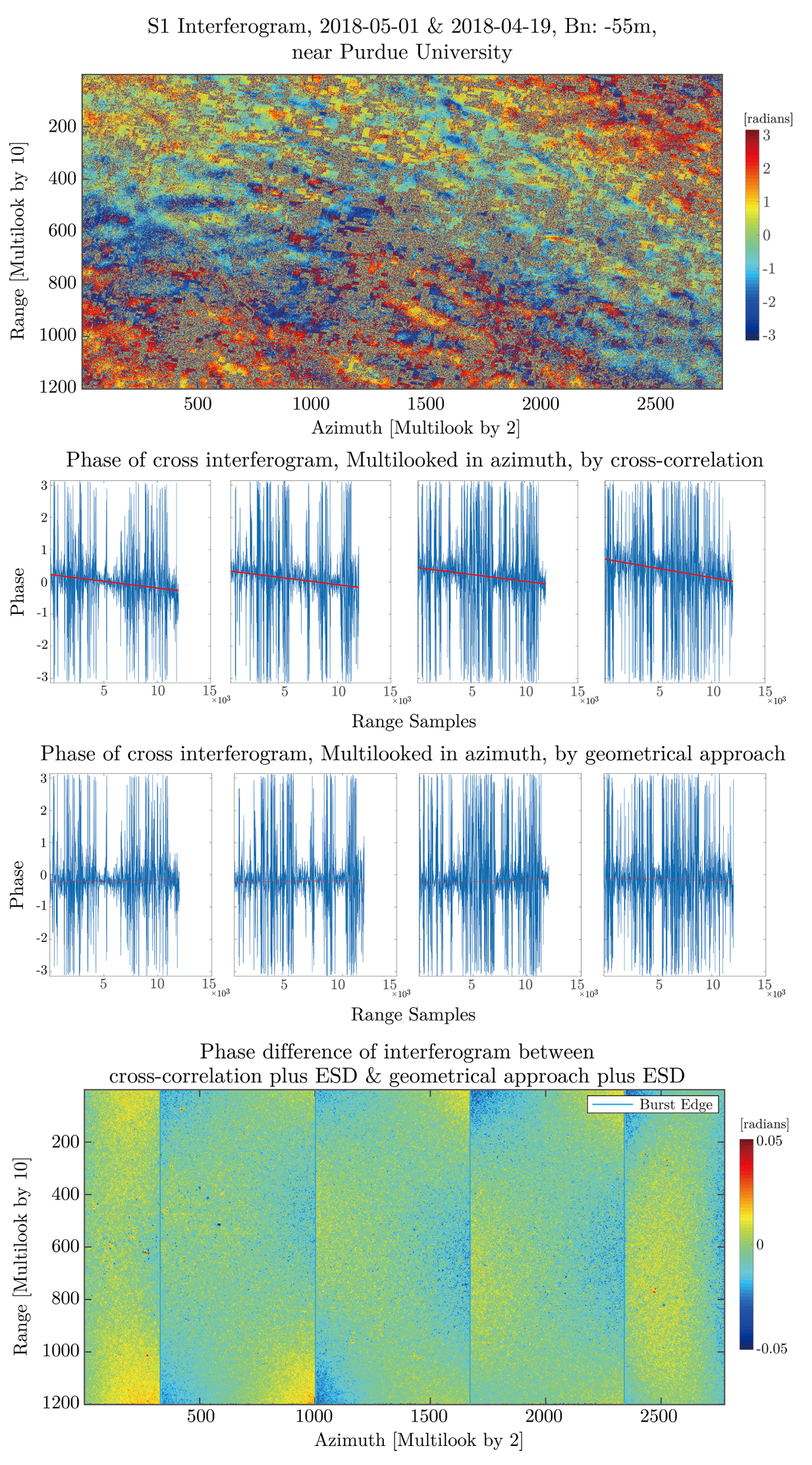
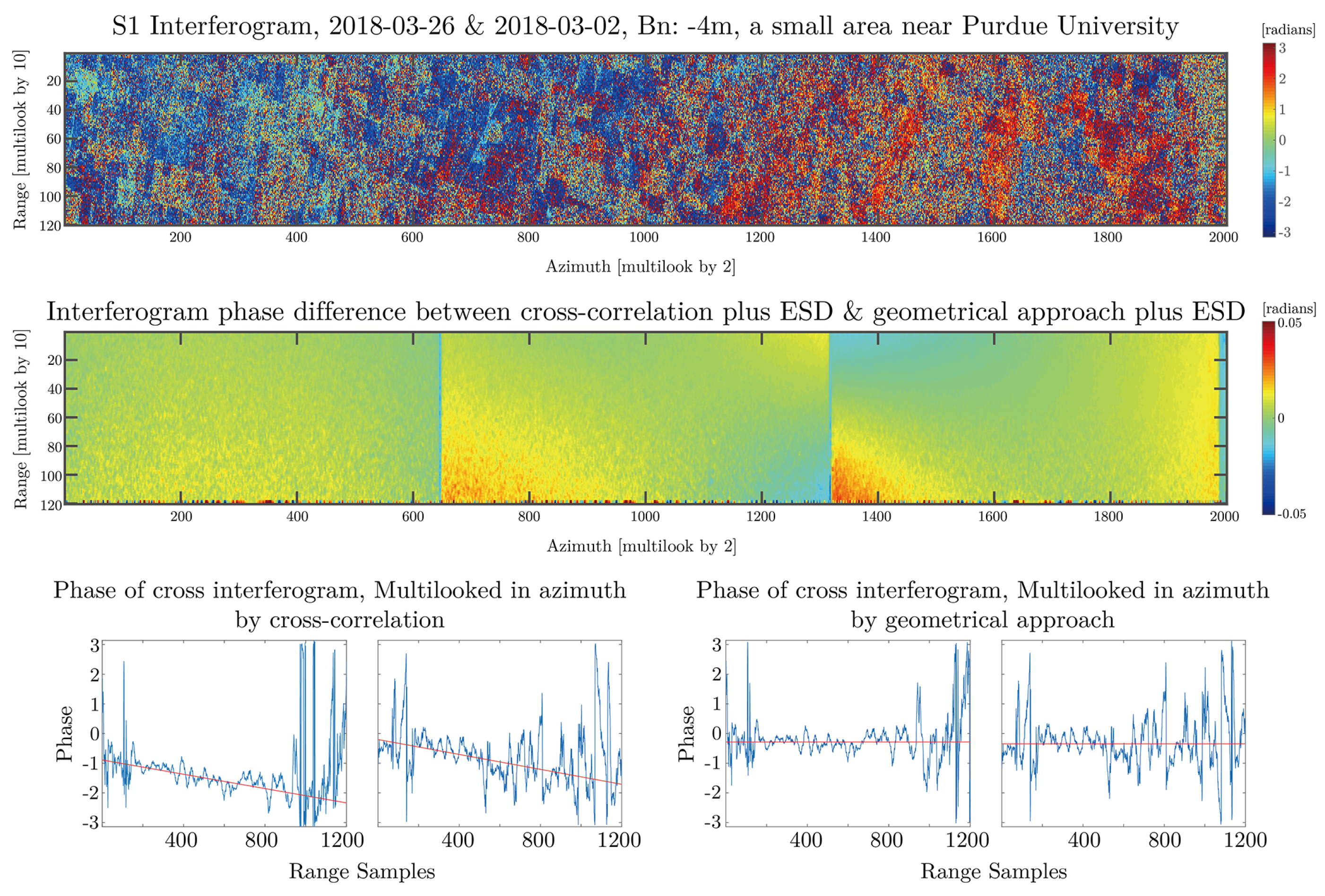
- The second site is a more generic one. This is a pair of data taken in the early summer (April and May 2018) that covers Purdue University, the U.S.A. The surroundings of Purdue University is mostly farmlands and countrysides. There are a few towns inside the area of interest (AOI) connected by the highway. This dataset has 24 days temporal baseline and 60 m spatial baseline. The majority of ground features is distributed scatterers, where the coherence will decrease exponentially in time. In addition, in the Discussion Section, we will present another case in the California Central Valley that shows a very similar ground feature.
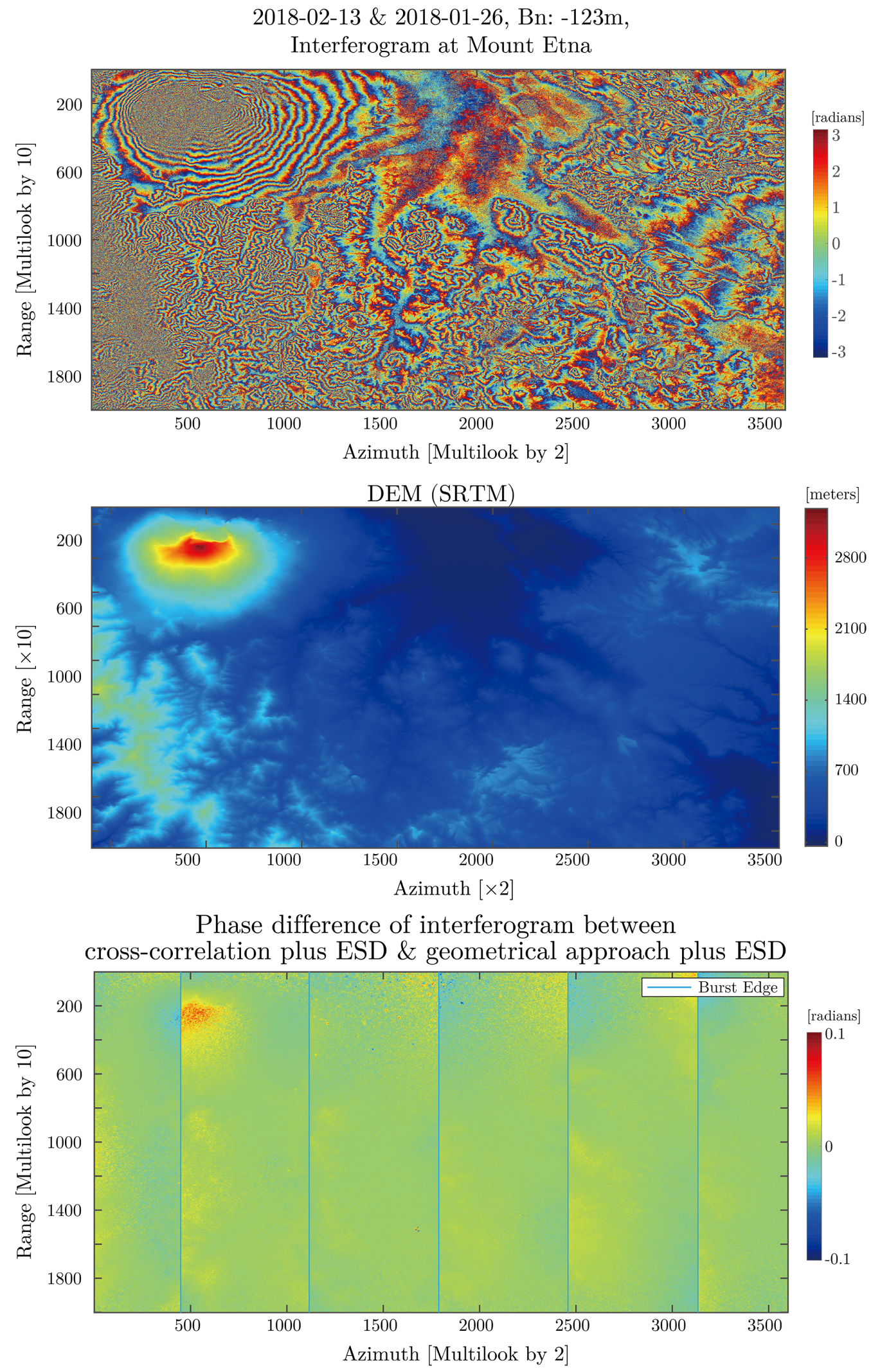
- The third site is Mt Etna in Italy. Mt Etna represents a case with large topography and a relatively large spatial baseline of 123 m (in the sense of S1). The highest point of Mt Etna reaches more than 3000 m whereas the lowest point is close to the sea level. The aim is to test the performance of the proposed approach when there is large height variation in the scene.
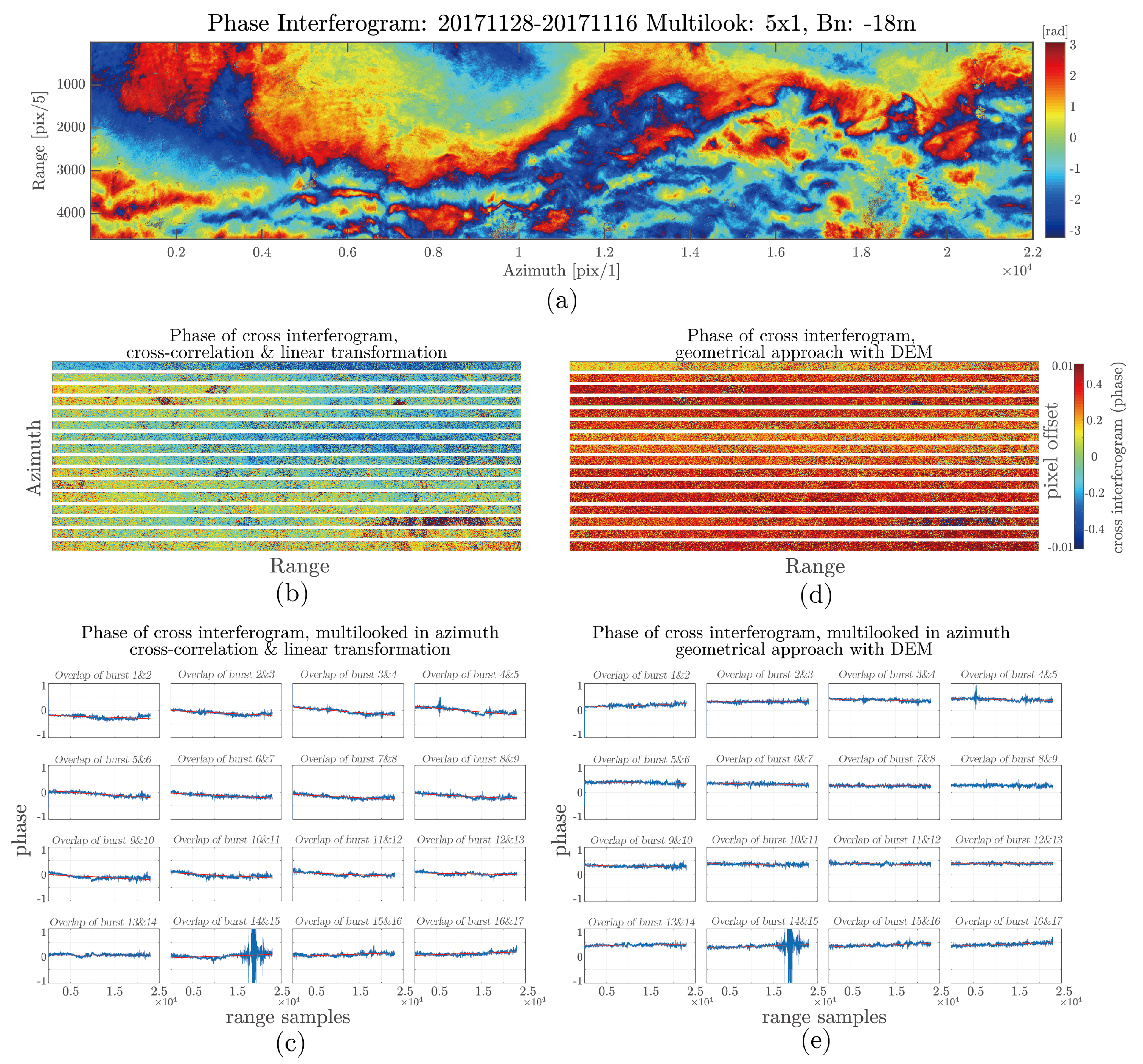
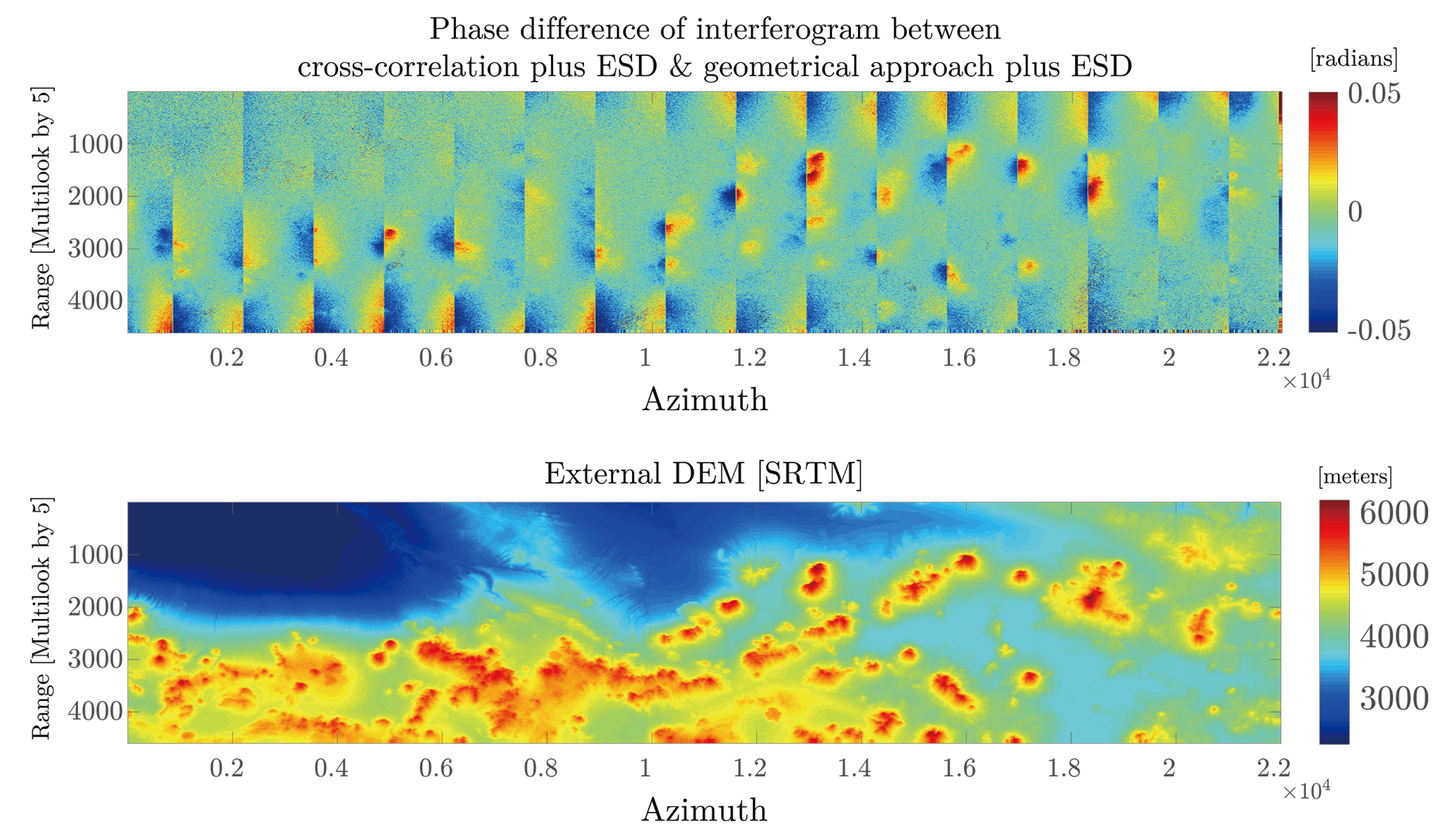
4.2. The Atacama Desert: A Long Swath with 17 Bursts
- They all have very large height values (comparing with the mean height of the AOI);
- They are all located at or near the the edges of bursts.
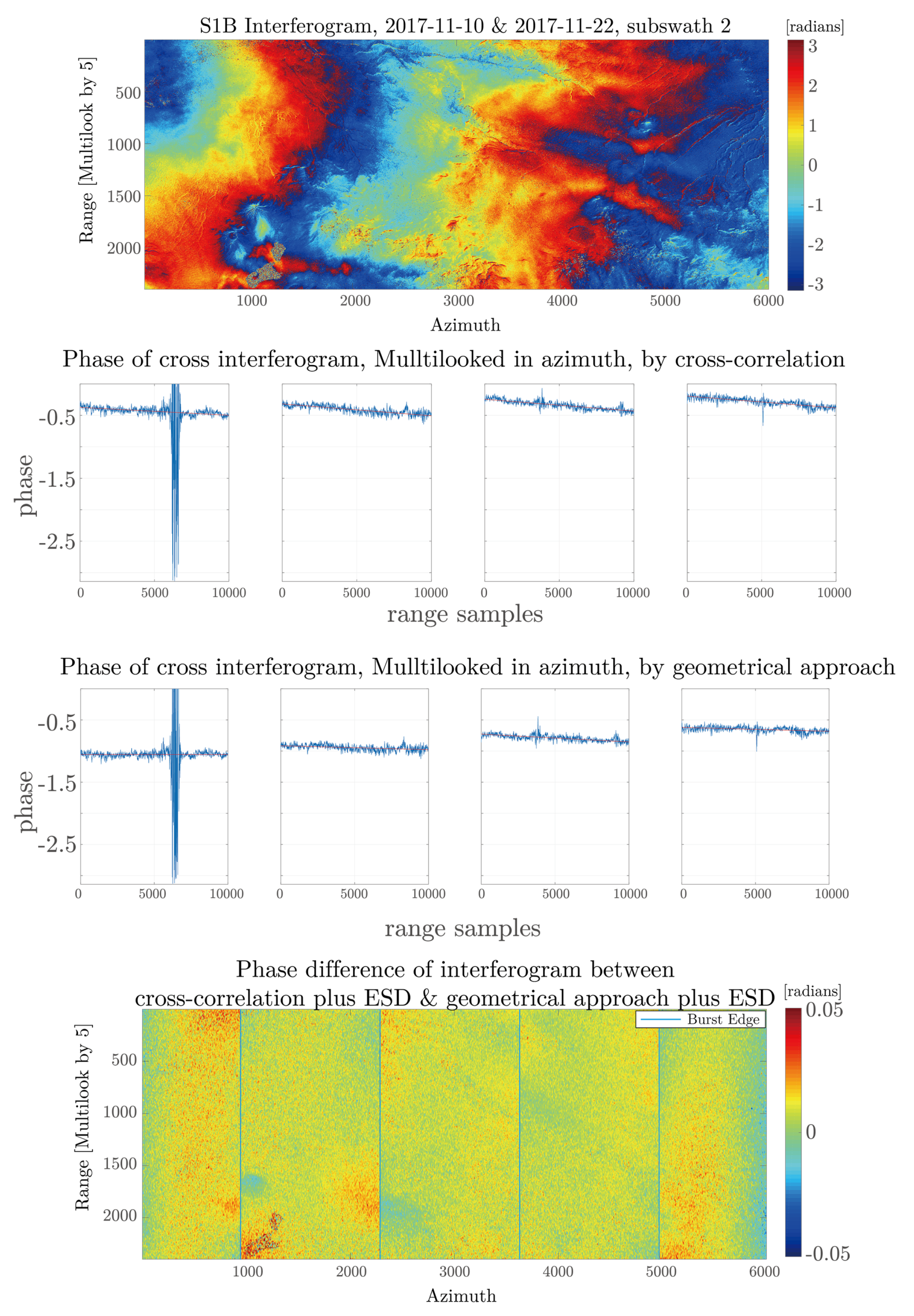
4.3. The Atacama Desert: A Short Swath With 4 Bursts
4.4. Purdue University: An Example with 24 Days Temporal Baseline in April
4.5. Mt Etna: An Example With Large Topography and 123 m Spatial Baseline
- (To use the established approach as the reference, then). The interferogram phase error correlates with the topography. The phase error is the largest at the top of the mountain.
- The interferogram phase correlates with the azimuth position inside the burst. The phase error is the largest at burst edges and tends toward zero at the center of the burst.
5. Further Discussion
5.1. The Rotation of Slave Image
5.2. DEM Related Distortions in TOPS Interferogram
5.3. The Break down Point of Cross-Correlation Method
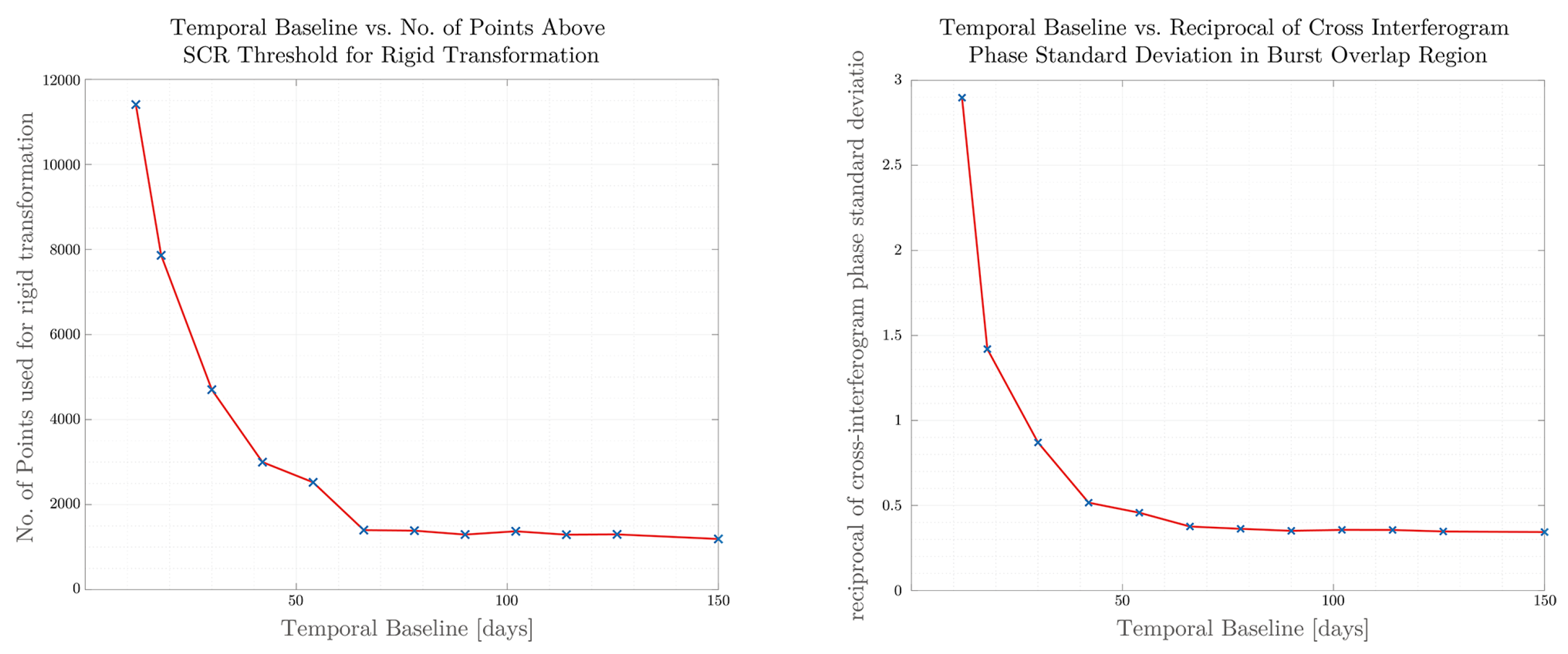
5.3.1. Are There Enough Points for Rigid Transformation to Avoid ESD Phase Ambiguity?
5.3.2. Cross-Correlation Method with Long Temporal Baseline
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Just, D.; Bamler, R. Phase statistics of interferograms with applications to synthetic aperture radar. Appl. Opt. 1994, 33, 4361–4368. [Google Scholar] [CrossRef] [PubMed]
- De Zan, F.; Monti Guarnieri, A. TOPSAR: Terrain Observation by Progressive Scans. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2352–2360. [Google Scholar] [CrossRef]
- Prats-Iraola, P.; Scheiber, R.; Marotti, L.; Wollstadt, S.; Reigber, A. TOPS interferometry with TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3179–3188. [Google Scholar] [CrossRef] [Green Version]
- Scheiber, R.; Jäger, M.; Prats-Iraola, P.; De Zan, F.; Geudtner, D. Speckle tracking and interferometric processing of TerraSAR-X TOPS data for mapping nonstationary scenarios. IEEE J. STARS 2015, 8, 1709–1720. [Google Scholar] [CrossRef]
- De Zan, F. Accuracy of Incoherent Speckle Tracking for Circular Gaussian Signals. IEEE Geosci. Remote Sens. Lett. 2014, 11, 264–267. [Google Scholar] [CrossRef] [Green Version]
- Wright, T.J.; Biggs, J.; Crippa, P.; Ebmeier, S.K.; Elliott, J.; Gonzalez, P.; Hooper, A.; Larsen, Y.; Li, Z.; Marinkovic, P.; et al. Towards Routine Monitoring of Tectonic and Volcanic Deformation with Sentinel-1. In Proceedings of the ESA FRINGE Workshop, Frascati, Italy, 23–27 March 2015. [Google Scholar]
- Geudtner, D.; Torres, R.; Snoeij, P.; Davidson, M. Sentinel-1 System Overview. In Proceedings of the ESA FRINGE Workshop, Frascati, Italy, 19–23 September 2011; pp. 1–6. [Google Scholar]
- Miranda, N.; Meadows, P.; Hajduch, G.; Pilgrim, A.; Piantanida, R.; Giudici, D.; Small, D.; Schubert, A.; Husson, R.; Vincent, P.; et al. The Sentinel-1A instrument and operational product performance status. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 2824–2827. [Google Scholar]
- Potin, P.; Rosich, B.; Grimont, P.; Miranda, N.; Shurmer, I.; O’Connell, A.; Torres, R.; Krassenburg, M. Sentinel-1 mission status. In Proceedings of the 11th European Conference on Synthetic Aperture Radar, Hamburg, Germany, 6–9 June 2016; pp. 1–6. [Google Scholar]
- Yagüe-Martínez, N.; Prats-Iraola, P.; González, F.R.; Brcic, R.; Shau, R.; Geudtner, D.; Eineder, M.; Bamler, R. Interferometric Processing of Sentinel-1 TOPS Data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2220–2234. [Google Scholar] [CrossRef]
- Ferretti, A.; Monti Guarnieri, A.; Prati, C.; Rocca, F. InSAR processing: A practical approach. In InSAR Principles: Guidelines for SAR Interferometry Processing and Interpretation; ESA Publications: Paris, France, 2007. [Google Scholar]
- Sansosti, E.; Berardino, P.; Manunta, M.; Serafino, F.; Fornaro, G. Geometrical SAR image registration. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2861–2870. [Google Scholar] [CrossRef]
- Scheiber, R.; Moreira, A. Coregistration of interferometric SAR images using spectral diversity. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2179–2191. [Google Scholar] [CrossRef]
- Prats-Iraola, P.; Rodriguez-Cassola, M.; Lopez-Dekker, P.; Scheiber, R.; De Zan, F.; Barat, I.; Geudtner, D. Considerations of the Orbital Tube for Interferometric Applications. In Proceedings of the ESA FRINGE Workshop, Frascati, Italy, 23–27 March 2015. [Google Scholar]
- Mancon, S.; Monti Guarnieri, A.; Tebaldini, S. Sentinel-1 precise orbit calibration and validation. In Proceedings of the ESA FRINGE Workshop, Frascati, Italy, 23–27 March 2015. [Google Scholar]
- Knapp, C.; Carter, G. The generalized correlation method for estimation of time delay. IEEE Trans. Acoust. Speech Signal Process. 1976, 24, 320–327. [Google Scholar] [CrossRef]
- Stein, S. Algorithms for ambiguity function processing. IEEE Trans. Acoust. Speech Signal Process. 1981, 29, 588–599. [Google Scholar] [CrossRef]
- Bamler, R.; Eineder, M. Accuracy of Differential Shift Estimation by Correlation and Split-Bandwidth Interferometry for Wideband and Delta-k SAR Systems. IEEE Geosci. Remote Sens. Lett. 2005, 2, 151–155. [Google Scholar] [CrossRef]
- Bamler, R. Interferometric stereo radargrammetry: Absolute height determination from ERS-ENVISAT interferograms. In Proceedings of the 2000 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 24–28 July 2000; Volume 2, pp. 742–745. [Google Scholar]
- Hanssen, R.F. Stochastic model for radar interferometry. In Radar Interferometry: Data Interpretation and Error Analysis; Springer: Berlin, Germany, 2001; Volume 2. [Google Scholar]
- Carter, G.C. Coherence and time delay estimation. Proc. IEEE 1987, 75, 236–255. [Google Scholar] [CrossRef]
- Zebker, H.A.; Villasenor, J. Decorrelation in interferometric radar echoes. IEEE Trans. Geosci. Remote Sens. 1992, 30, 950–959. [Google Scholar] [CrossRef] [Green Version]
- Patri, C.; Rocca, F. Range Resolution Enhancement with Multiple Sar Surveys Combination. In Proceedings of the IGARSS ’92 International Geoscience and Remote Sensing Symposium, Houston, TX, USA, 26–29 May 1992; Volume 2, pp. 1576–1578. [Google Scholar]
- Serafino, F. SAR image coregistration based on isolated point scatterers. IEEE Geosci. Remote Sens. Lett. 2006, 3, 354–358. [Google Scholar] [CrossRef]
- Yetik, I.S.; Nehorai, A. Performance bounds on image registration. IEEE Trans. Signal Process. 2006, 54, 1737–1749. [Google Scholar] [CrossRef]
- Li, J.; Huang, P. A comment on “performance bounds on image registration”. IEEE Trans. Signal Process. 2009, 57, 2432–2433. [Google Scholar]
- Mancon, S.; Guarnieri, A.M.; Giudici, D.; Tebaldini, S. On the phase calibration by multisquint analysis in TOPSAR and stripmap interferometry. IEEE Trans. Geosci. Remote Sens. 2017, 55, 134–147. [Google Scholar] [CrossRef]
- Biggs, J.; Wright, T.; Lu, Z.; Parsons, B. Multi-interferogram method for measuring interseismic deformation: Denali Fault, Alaska. Geophys. J. Int. 2007, 170, 1165–1179. [Google Scholar] [CrossRef] [Green Version]
- Miranda, N. Definition of the TOPS SLC Deramping Function for Products Generated by the S-1 IPF; Techreport COPE-GSEG-EOPG-TN-14-0025; ESA Publications: Paris, France, 2015. [Google Scholar]
- Piantanida, R.; Hajduch, G.; Poullaouec, J. Sentinel-1 Level 1 Detailed Algorithm Definition; Techreport SEN-TN-52-7445; ESA Publications: Paris, France, 2016. [Google Scholar]
- Bara, M.; Scheiber, R.; Broquetas, A.; Moreira, A. Interferometric SAR signal analysis in the presence of squint. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2164–2178. [Google Scholar] [CrossRef] [Green Version]
- Grandin, R. Interferometric processing of SLC Sentinel-1 TOPS data. In Proceedings of the ESA FRINGE Workshop, Frascati, Italy, 23–27 March 2015. [Google Scholar]
- Fattahi, H.; Agram, P.; Simons, M. A Network-Based Enhanced Spectral Diversity Approach for TOPS Time-Series Analysis. IEEE Trans. Geosci. Remote Sens. 2017, 55, 777–786. [Google Scholar] [CrossRef] [Green Version]
- Yagüe-Martínez, N.; González, F.R.; Brcic, R.; Shau, R. Interferometric Evaluation of Sentinel-1A TOPS data. In Proceedings of the ESA FRINGE Workshop, Frascati, Italy, 23–27 March 2015. [Google Scholar]
- Larsen, Y.; Marinkovic, P. Sentinel-1 TOPS data coregistration operational and practical considerations. In Proceedings of the ESA FRINGE Workshop, Frascati, Italy, 23–27 March 2015. [Google Scholar]
- Schwerdt, M.; Schmidt, K.; Tous Ramon, N.; Klenk, P.; Yague-Martinez, N.; Prats-Iraola, P.; Zink, M.; Geudtner, D. Independent system calibration of Sentinel-1B. Remote Sens. 2017, 9, 511. [Google Scholar] [CrossRef]
- Rodriguez-Cassola, M.; Prats-Iraola, P.; De Zan, F.; Scheiber, R.; Reigber, A.; Geudtner, D.; Moreira, A. Doppler-related distortions in TOPS SAR images. IEEE Trans. Geosci. Remote Sens. 2015, 53, 25–35. [Google Scholar] [CrossRef]
- Yagüe-Martínez, N.; De Zan, F.; Prats-Iraola, P. Coregistration of Interferometric Stacks of Sentinel-1 TOPS Data. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1002–1006. [Google Scholar] [CrossRef]










© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, Y.; Perissin, D.; Bai, J. Investigations on the Coregistration of Sentinel-1 TOPS with the Conventional Cross-Correlation Technique. Remote Sens. 2018, 10, 1405. https://doi.org/10.3390/rs10091405
Qin Y, Perissin D, Bai J. Investigations on the Coregistration of Sentinel-1 TOPS with the Conventional Cross-Correlation Technique. Remote Sensing. 2018; 10(9):1405. https://doi.org/10.3390/rs10091405
Chicago/Turabian StyleQin, Yuxiao, Daniele Perissin, and Jing Bai. 2018. "Investigations on the Coregistration of Sentinel-1 TOPS with the Conventional Cross-Correlation Technique" Remote Sensing 10, no. 9: 1405. https://doi.org/10.3390/rs10091405
APA StyleQin, Y., Perissin, D., & Bai, J. (2018). Investigations on the Coregistration of Sentinel-1 TOPS with the Conventional Cross-Correlation Technique. Remote Sensing, 10(9), 1405. https://doi.org/10.3390/rs10091405