Moving Target Detection with Modified Logarithm Background Subtraction and Its Application to the GF-3 Spotlight Mode


Abstract
:1. Introduction
2. Gaofen-3 SAR Sensor and Dataset
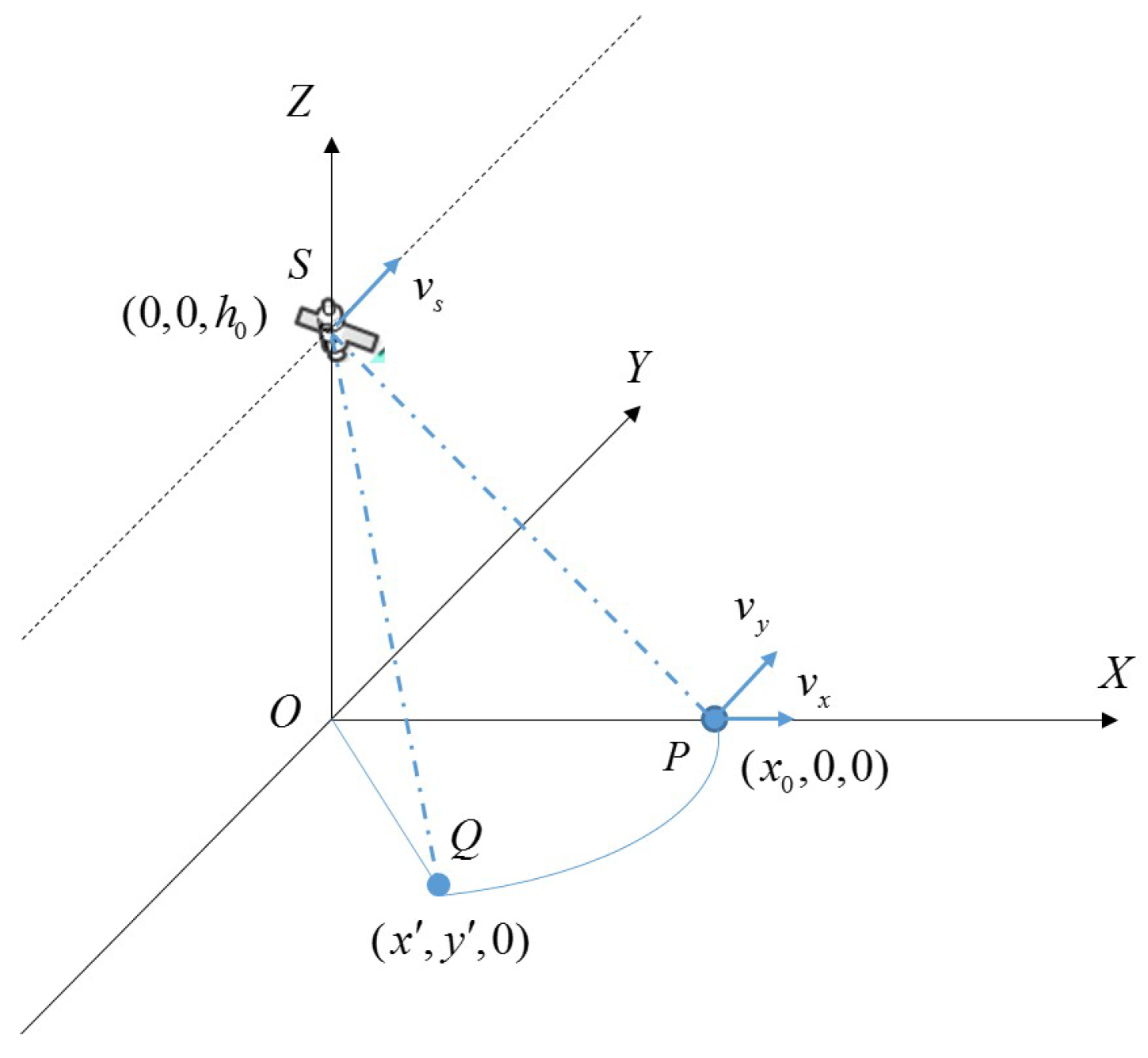
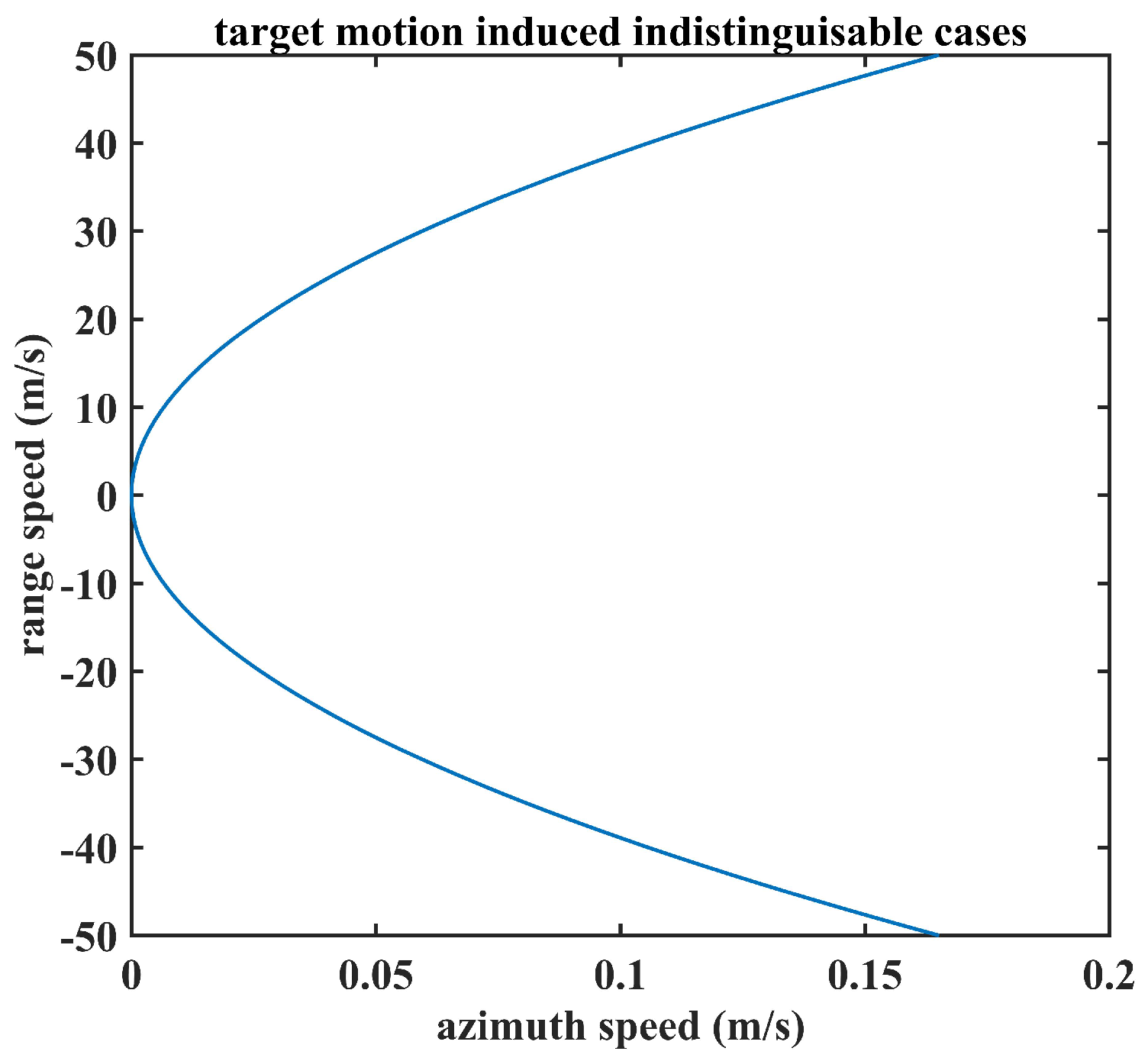
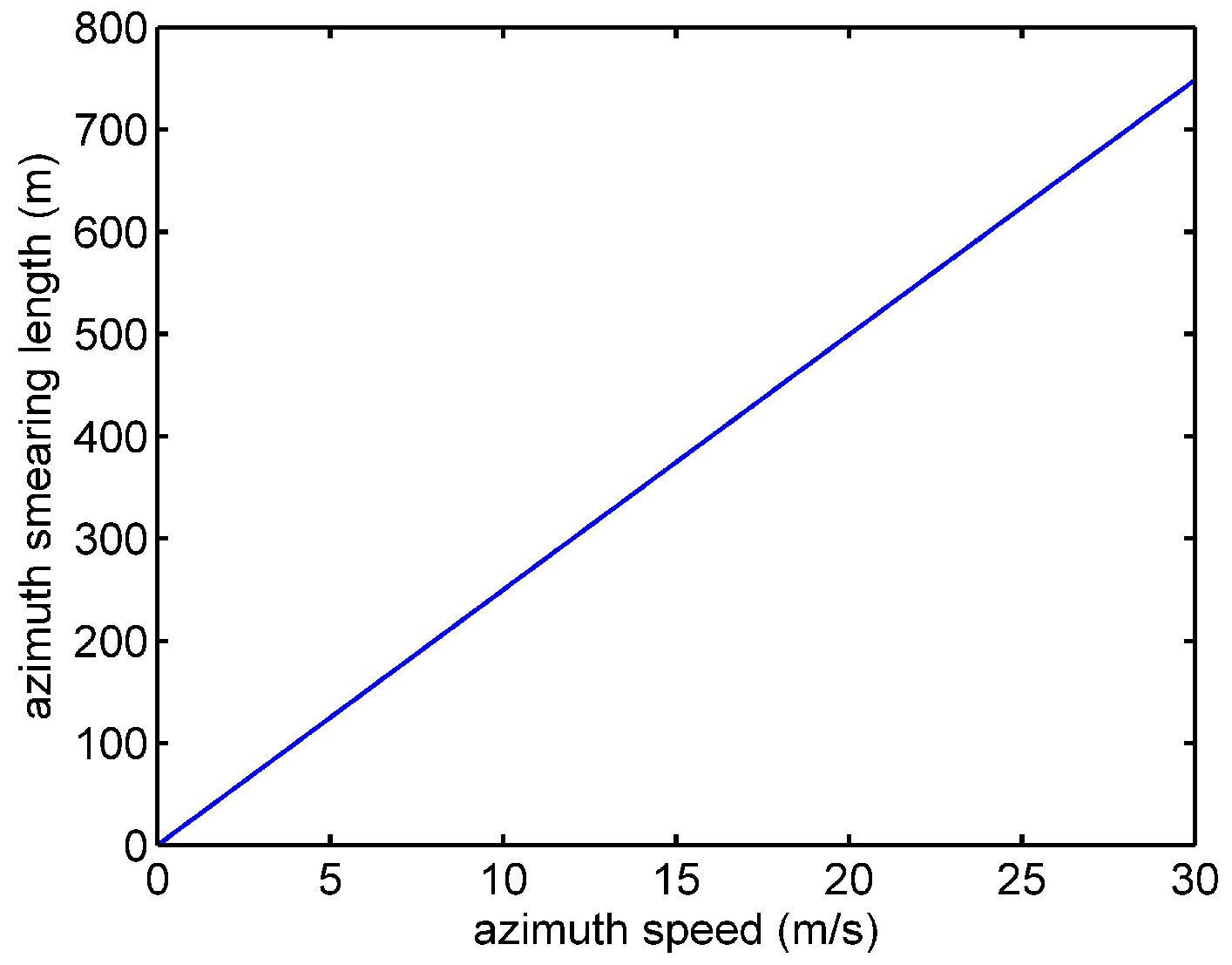
3. Signal Model
4. Method
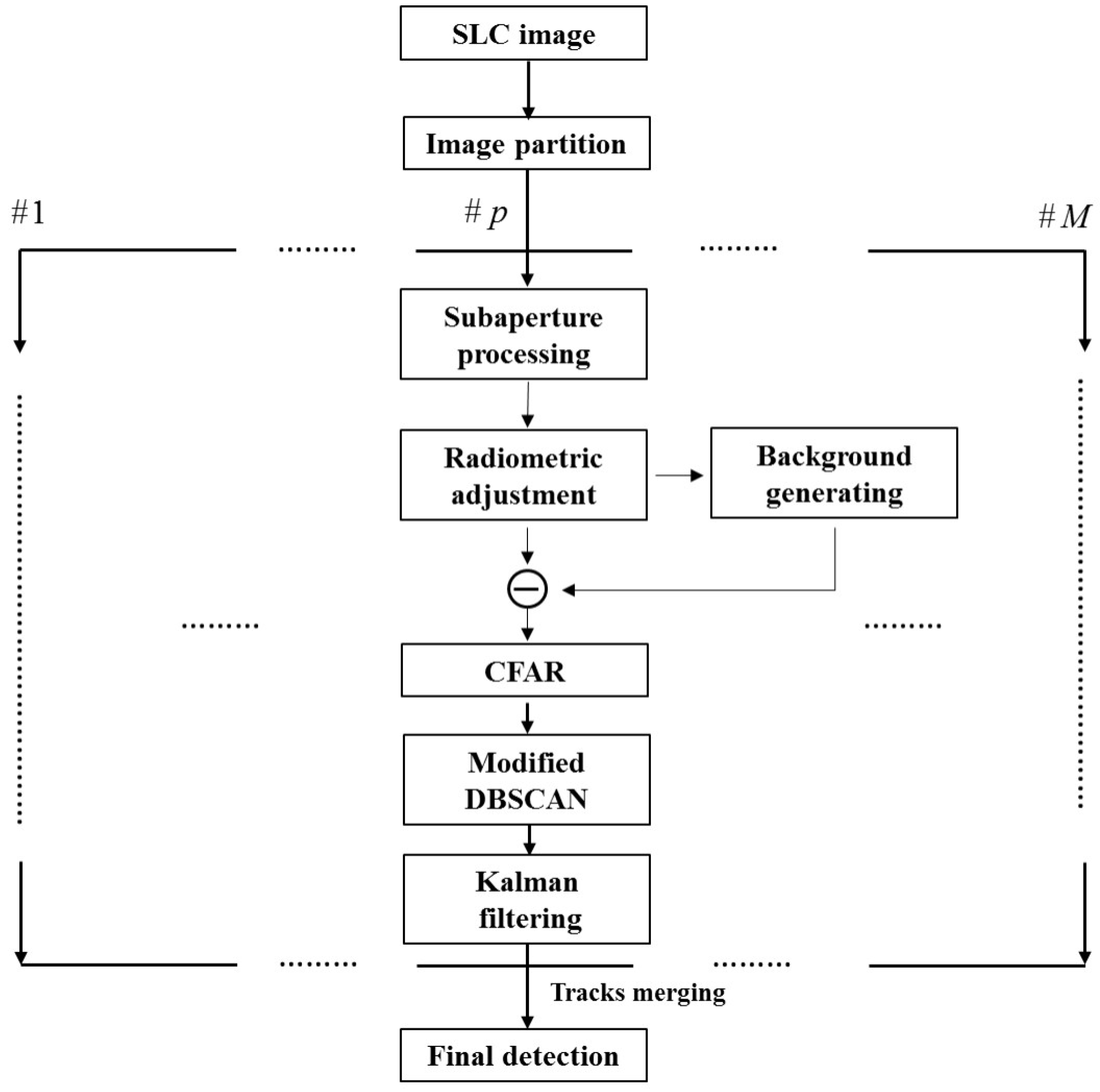
4.1. Processing Chain
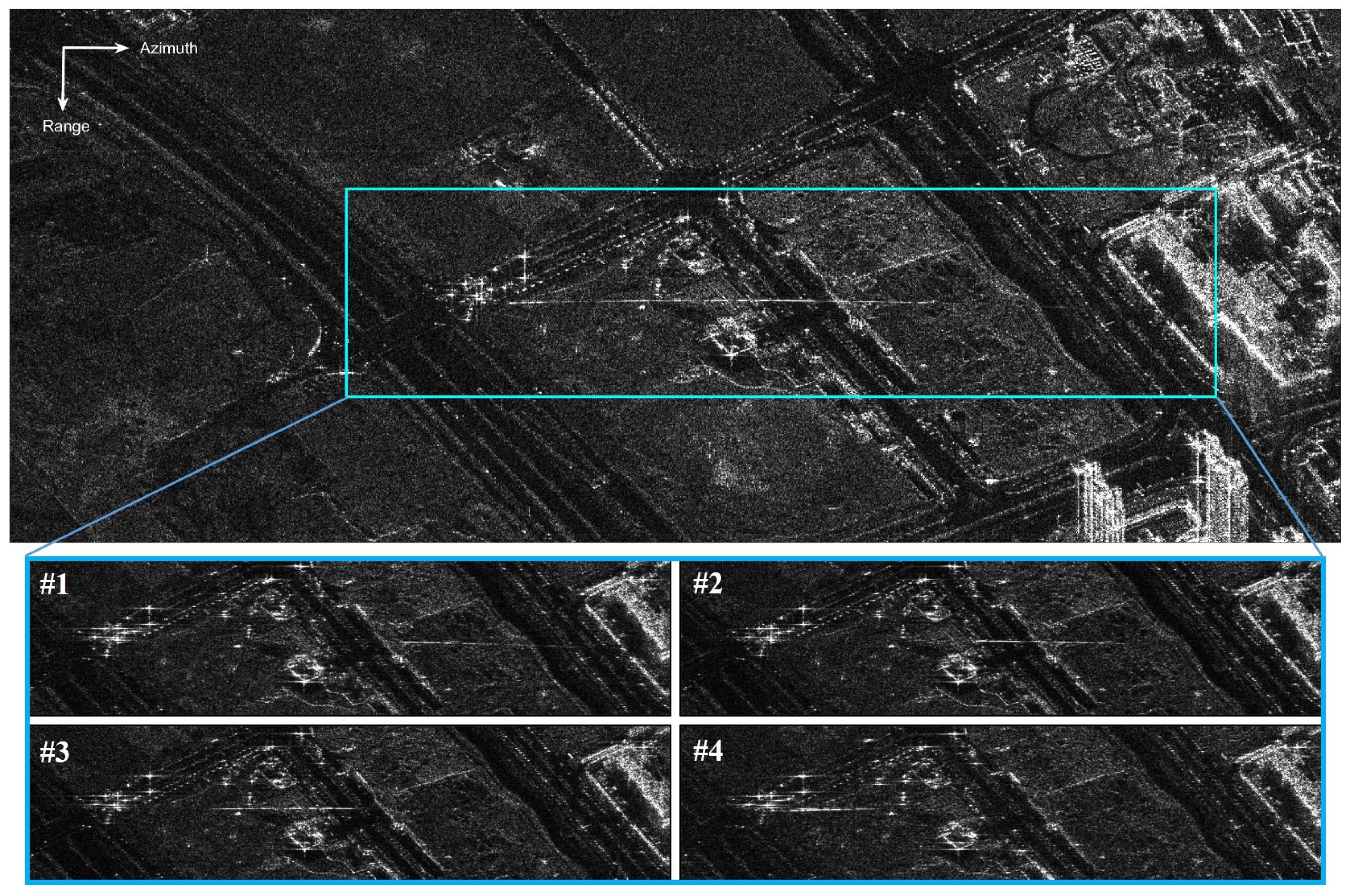
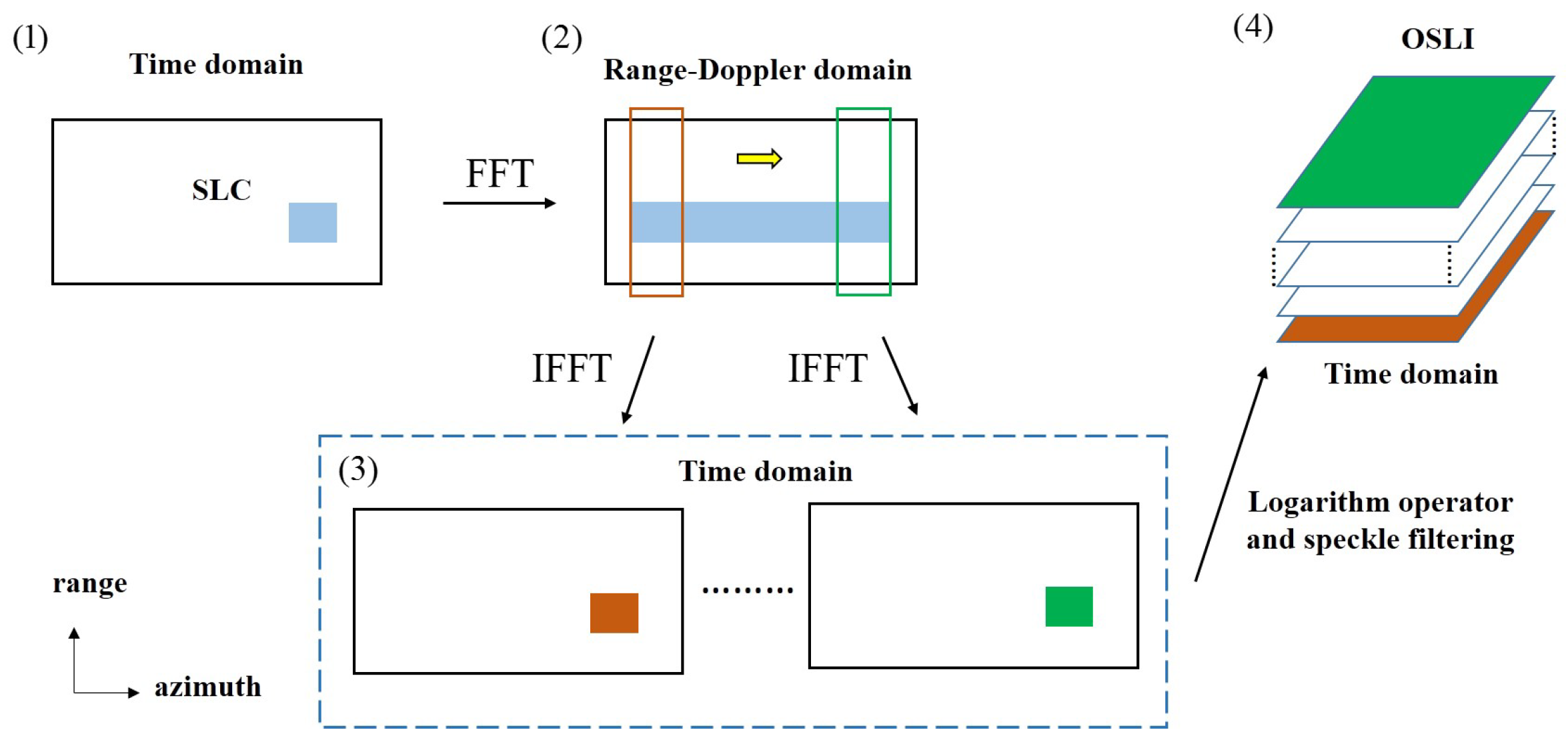
4.2. Subaperture Processing
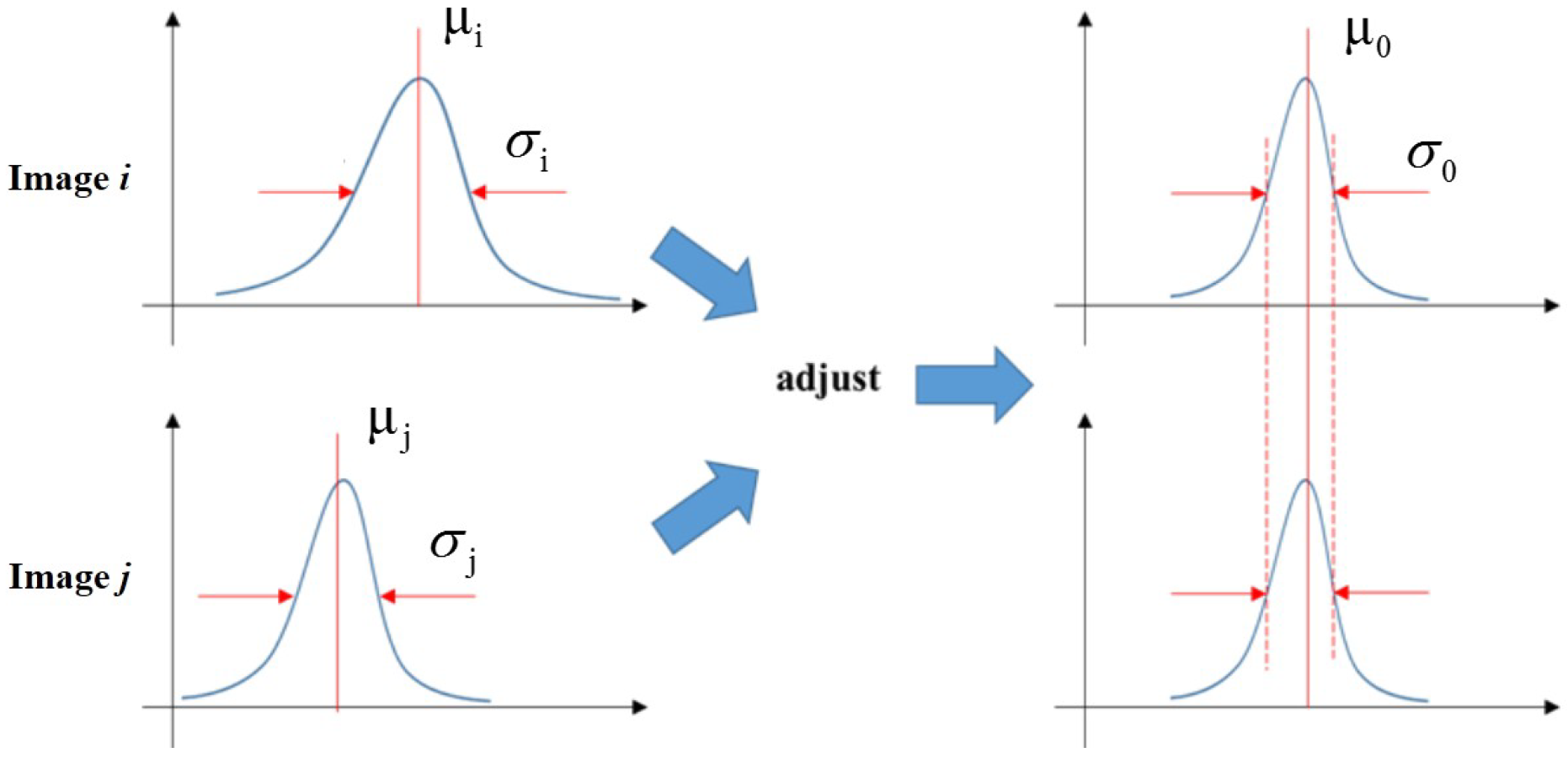
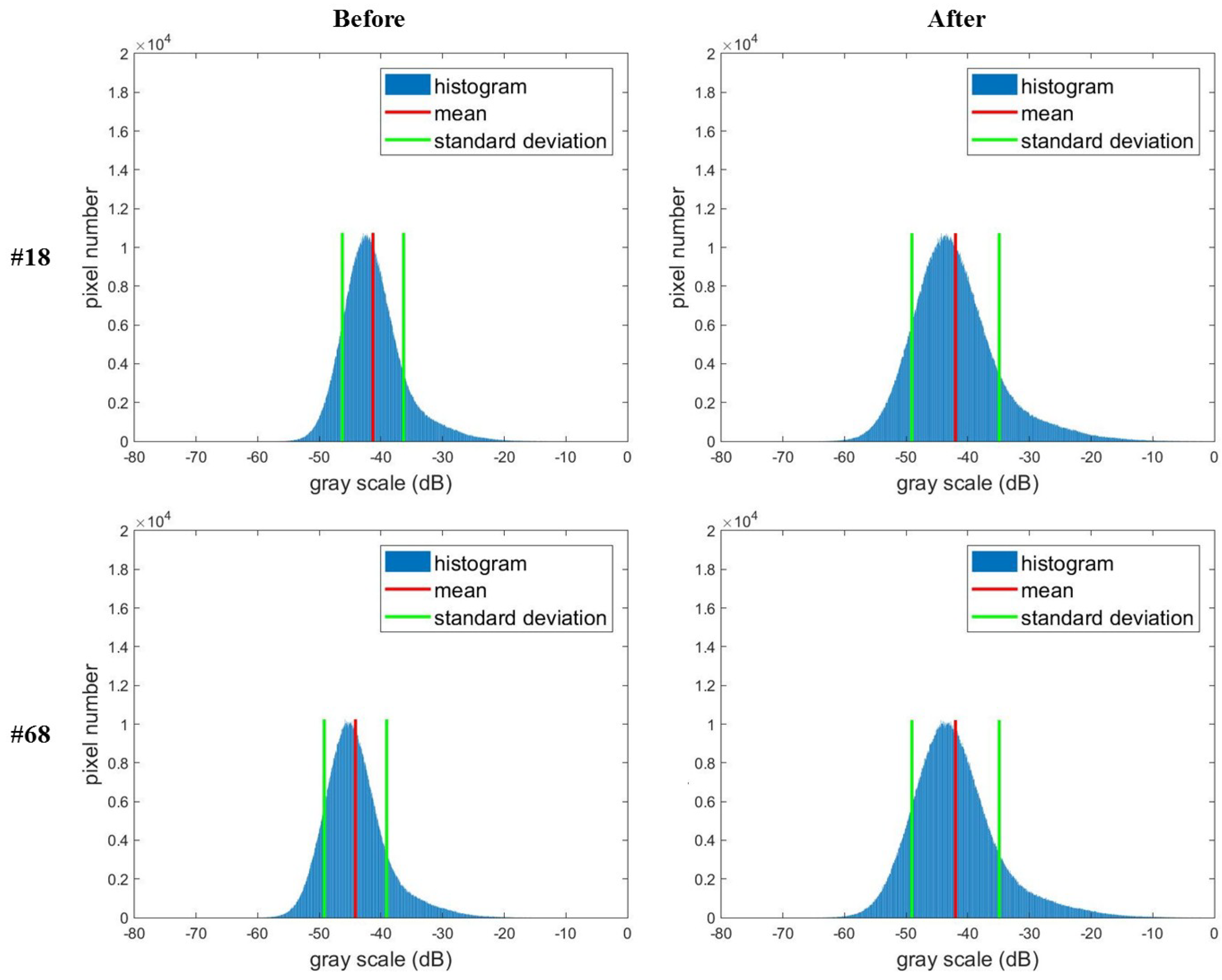
4.3. Radiometric Adjustment
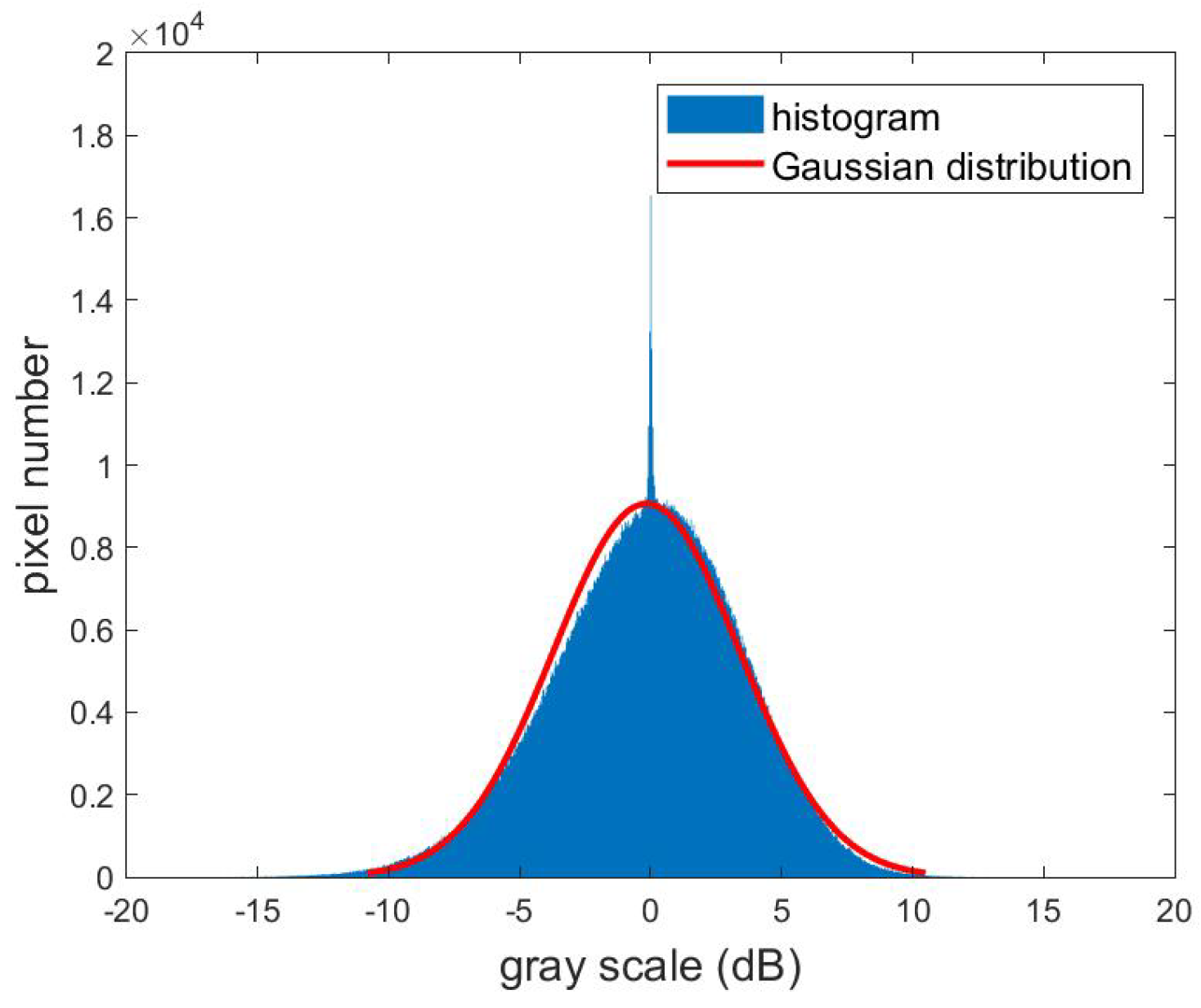
4.4. Background Image Generating and Subtraction
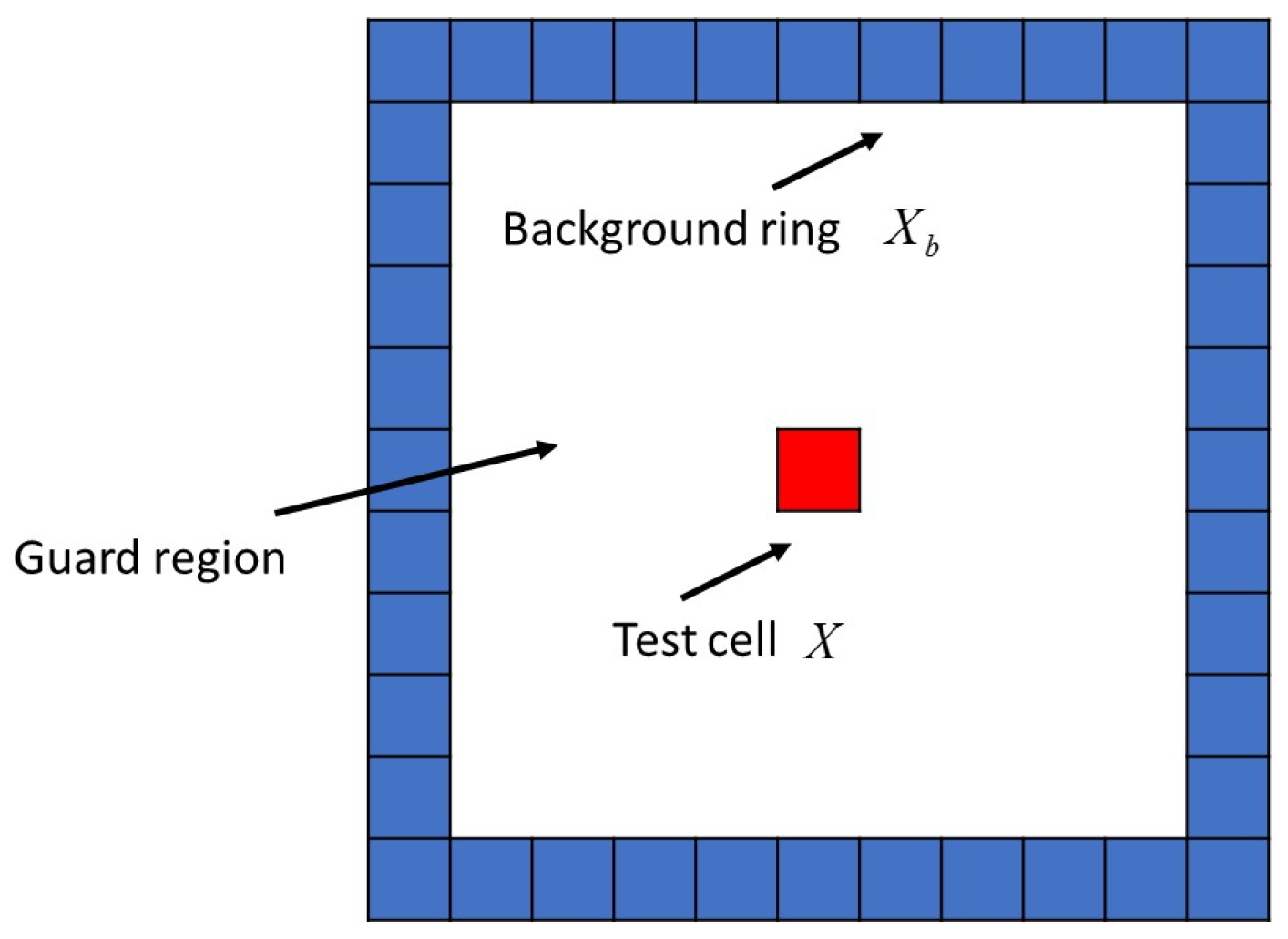
4.5. CFAR Detection
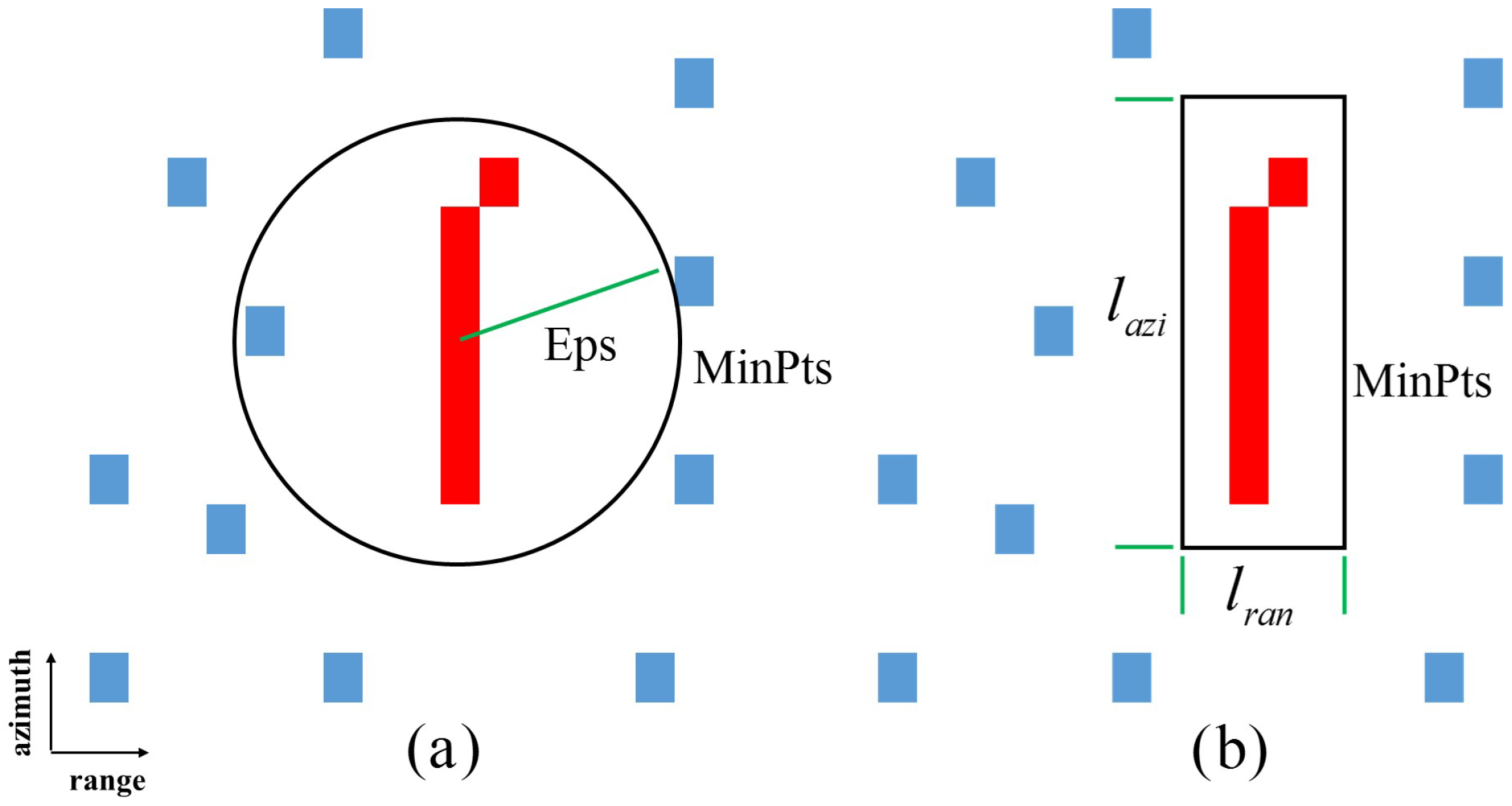
4.6. Modified DBSCAN
4.7. Kalman Filtering
5. Experiment
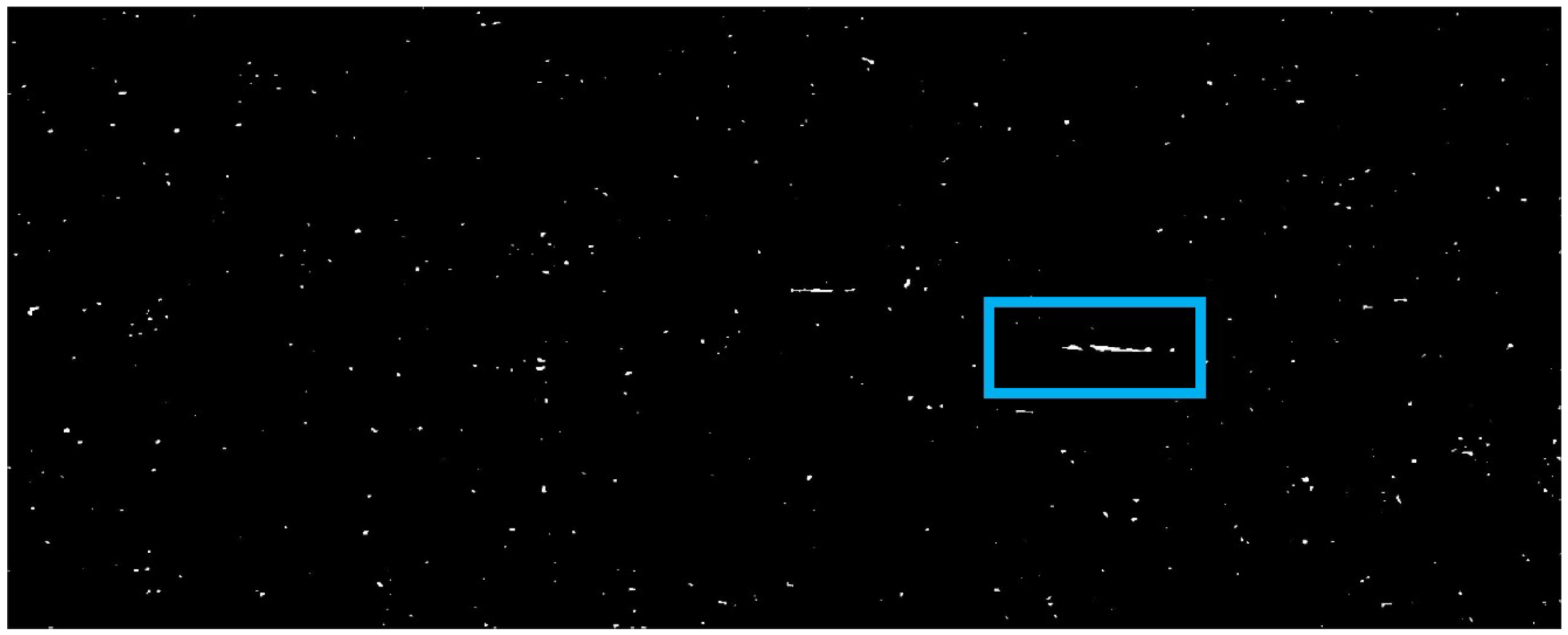
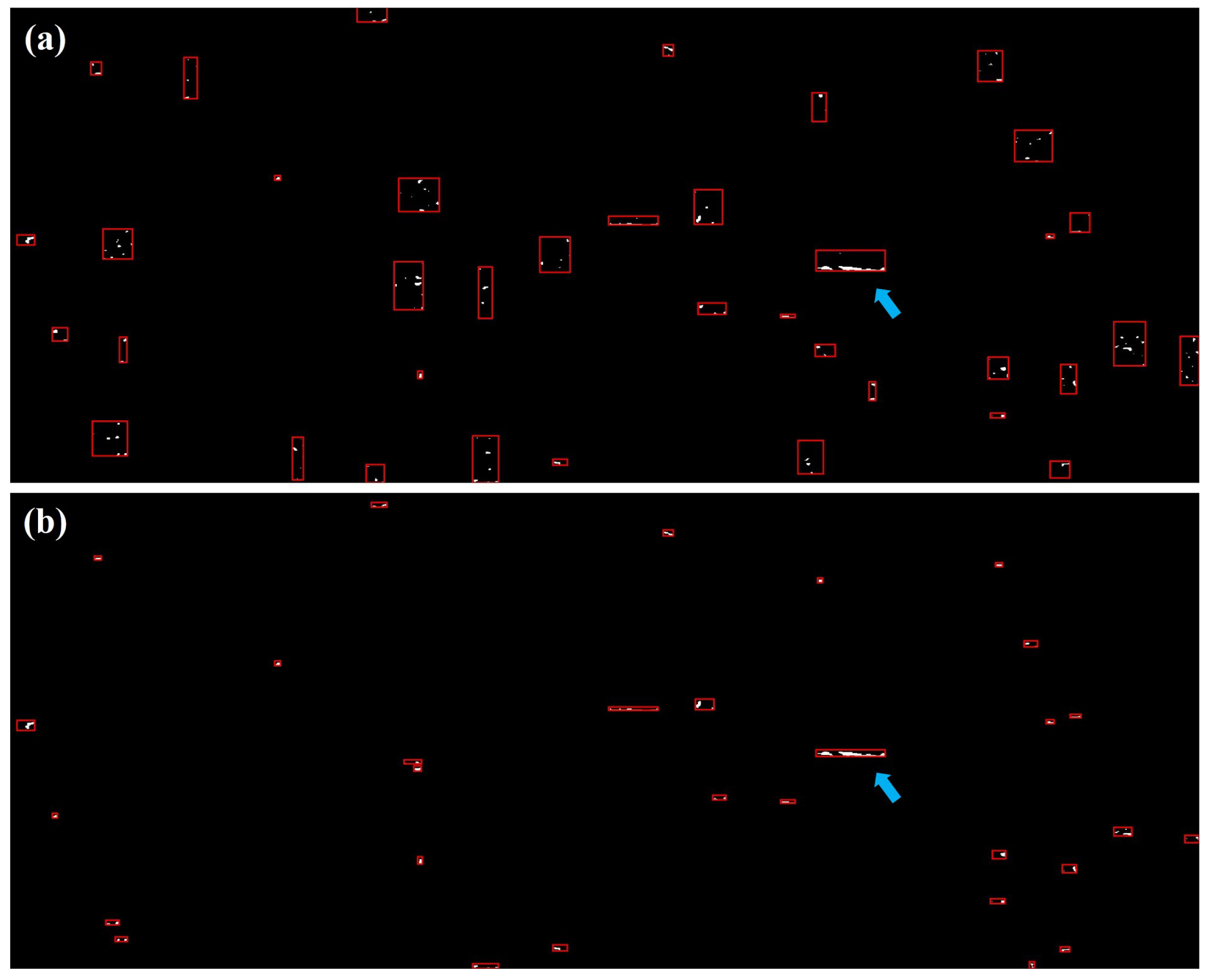
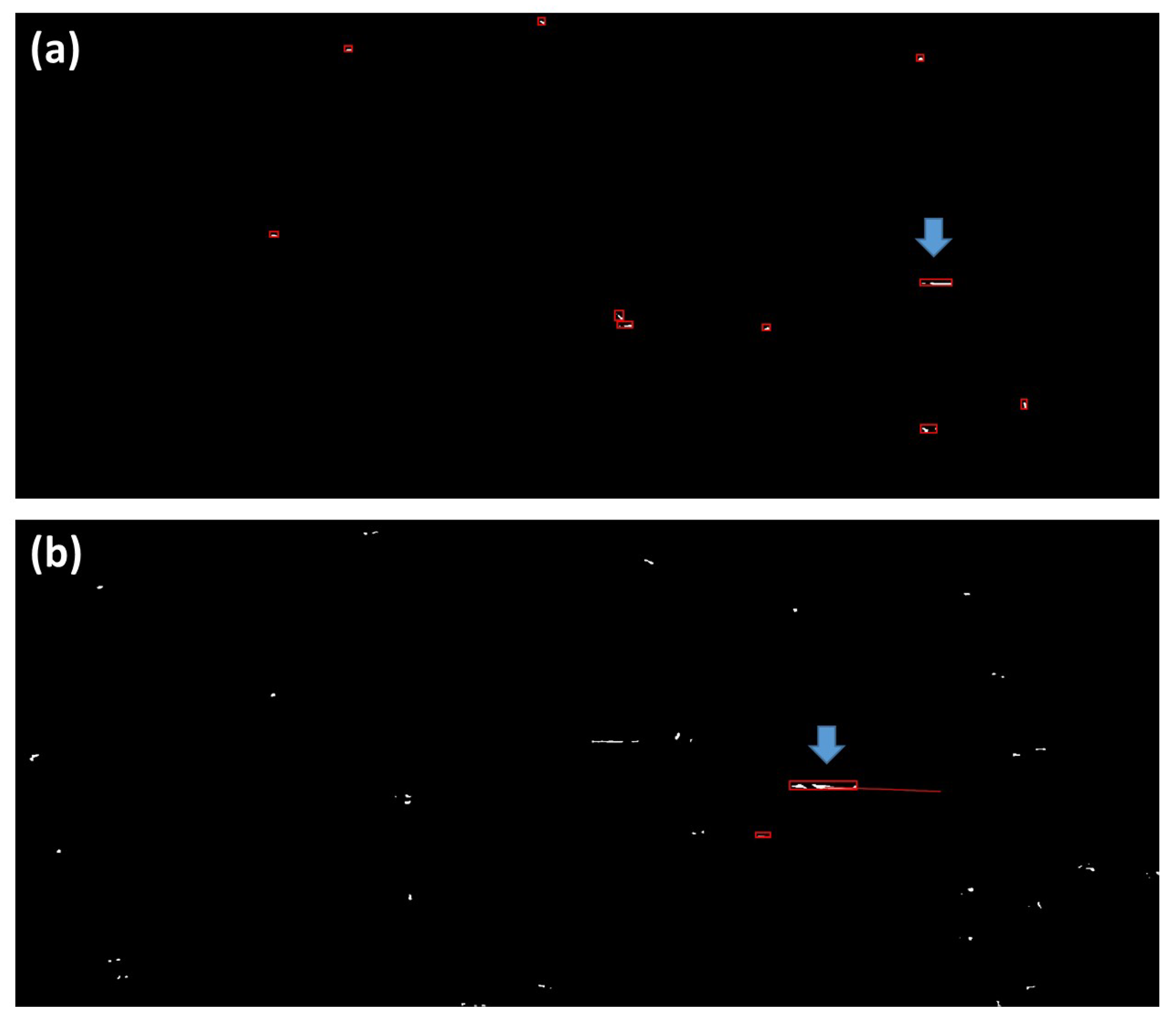
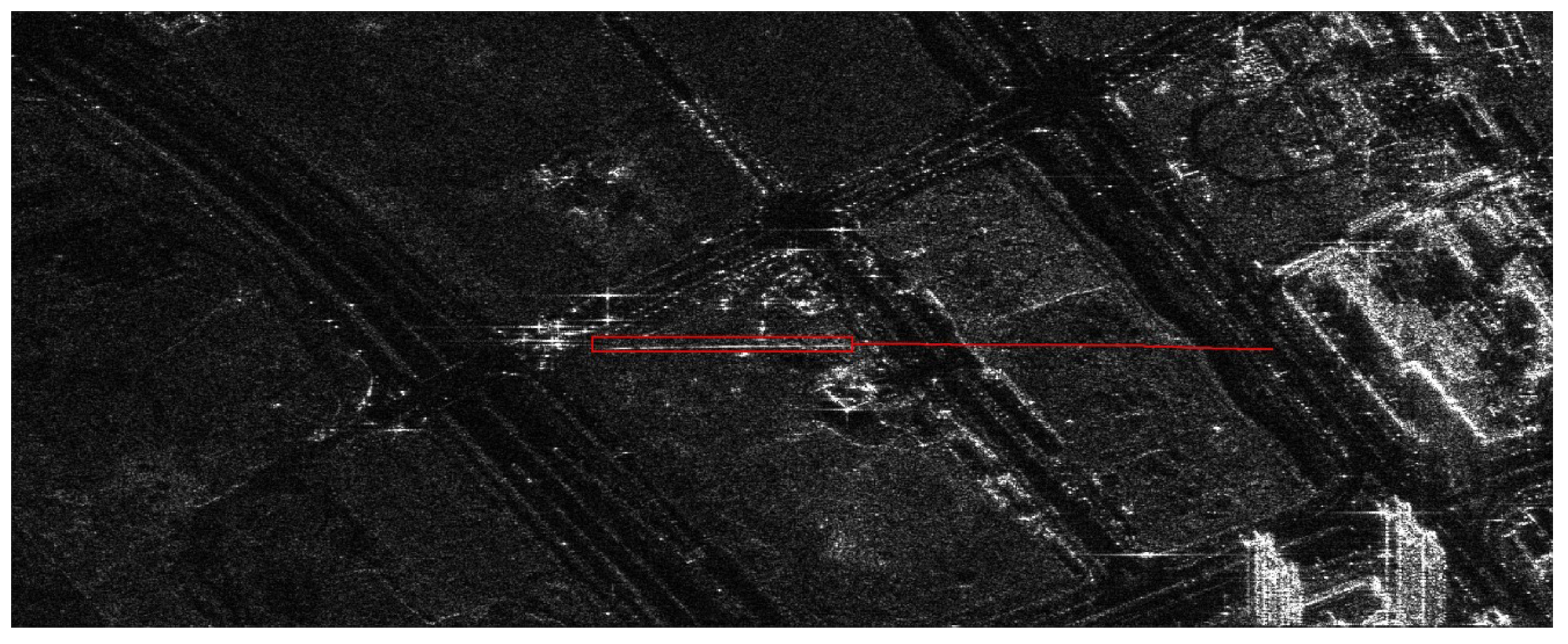
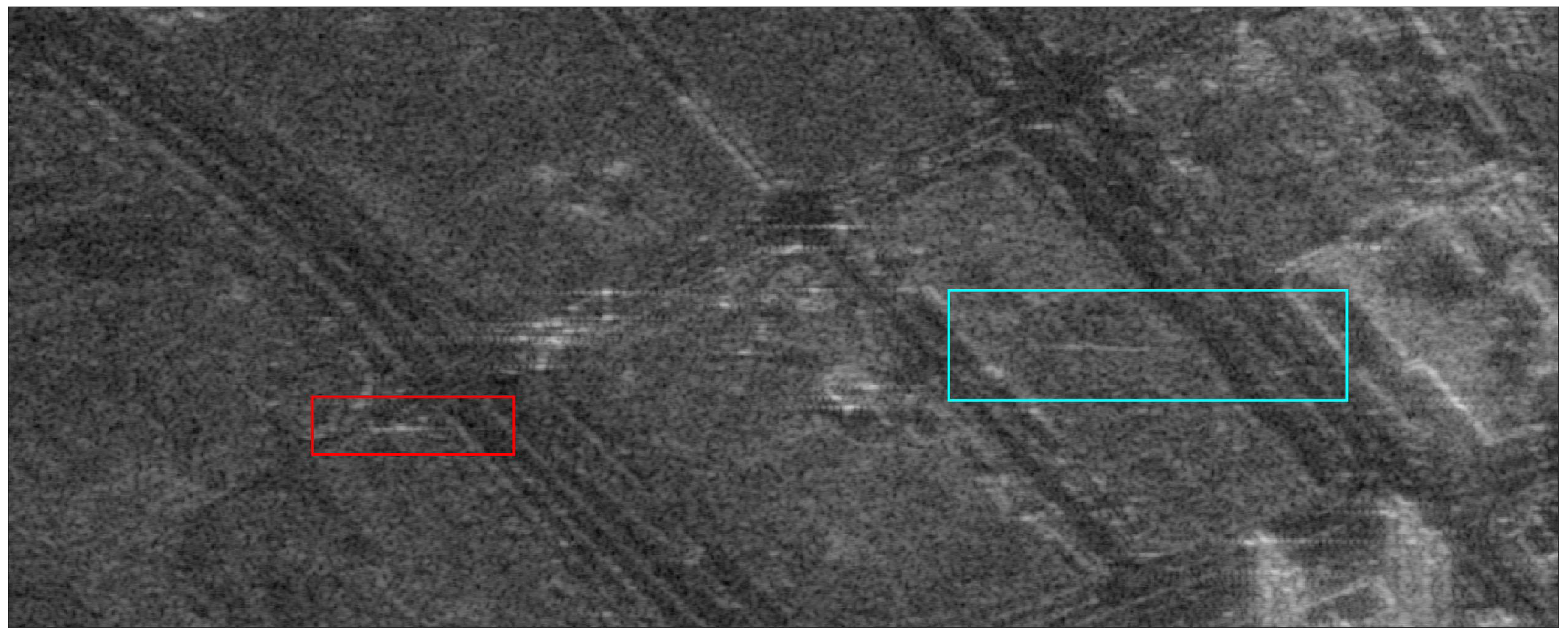
5.1. Processing Results
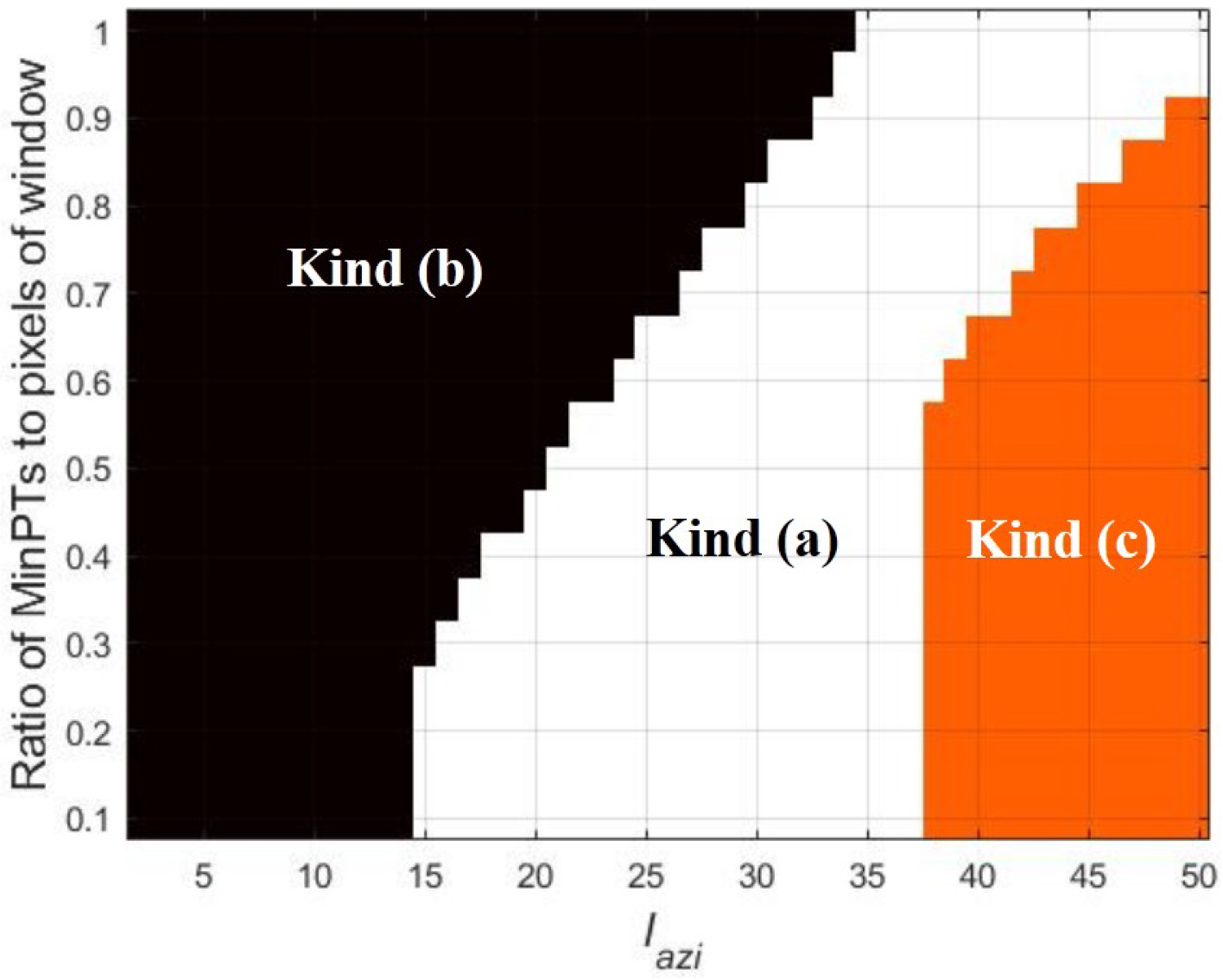
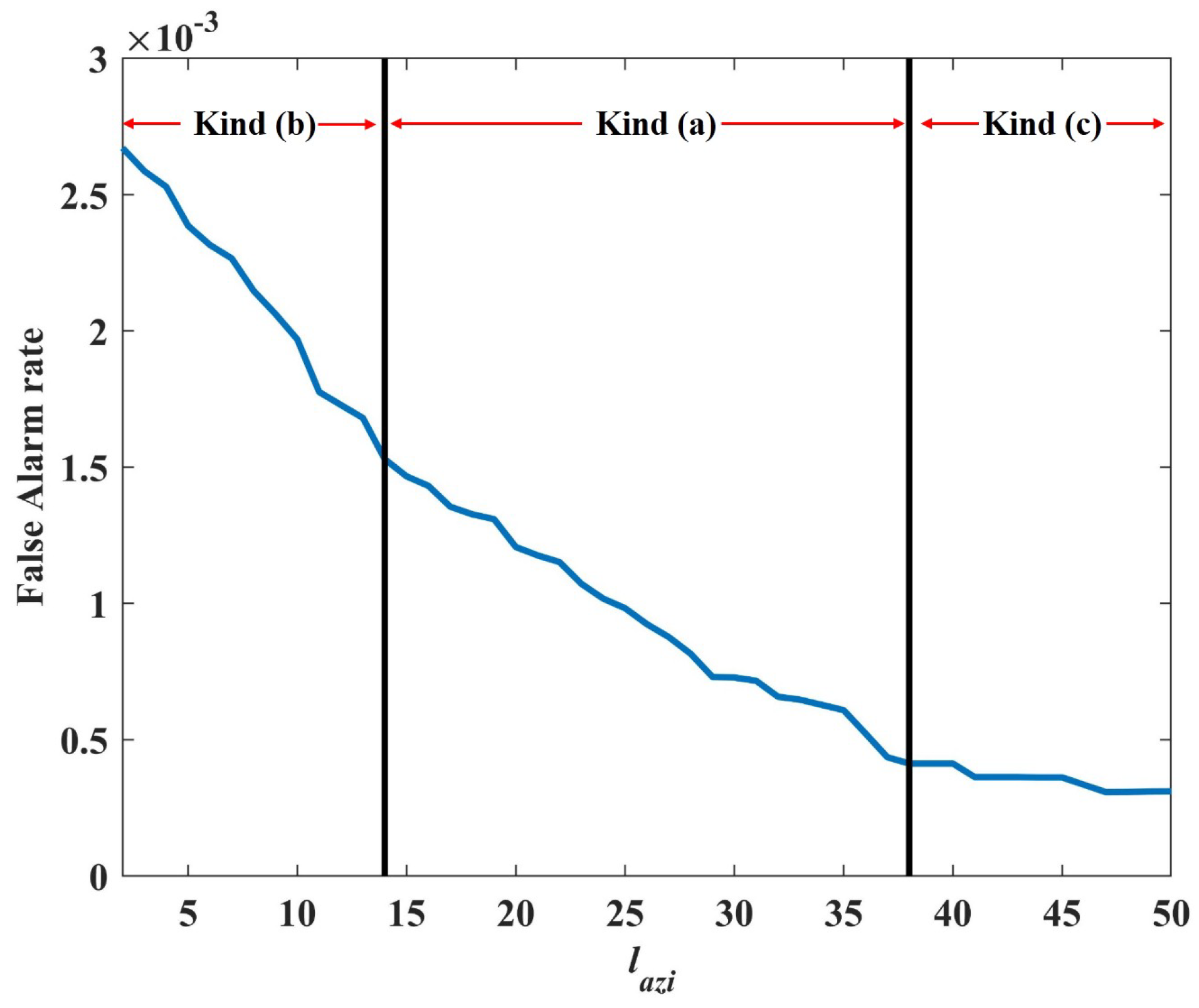
- (a) the real target signatures are classified as one cluster (correct);
- (b) the real target signatures are classified as different clusters (incorrect);
- (c) the real and false target signatures are classified as one cluster (incorrect);
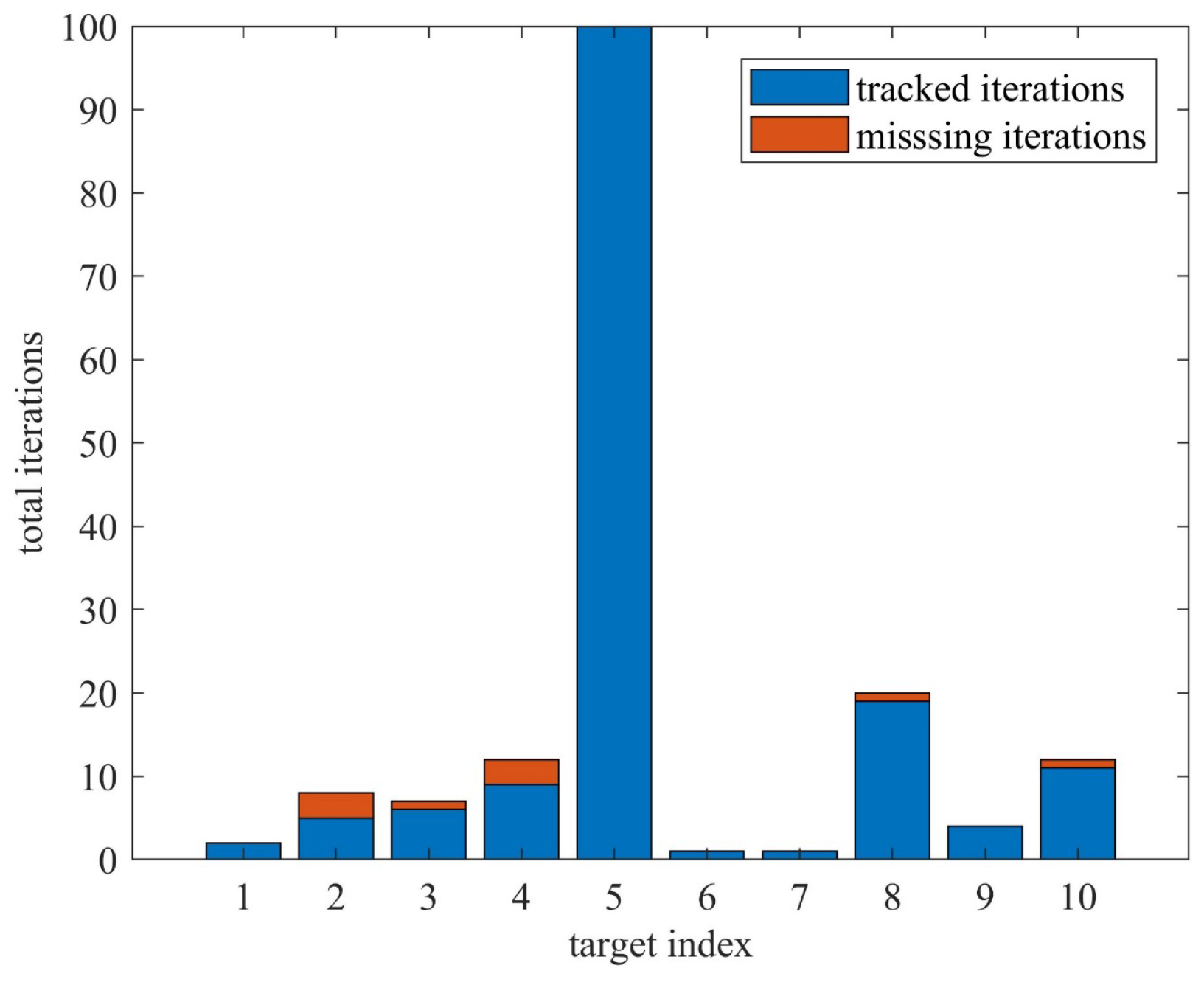
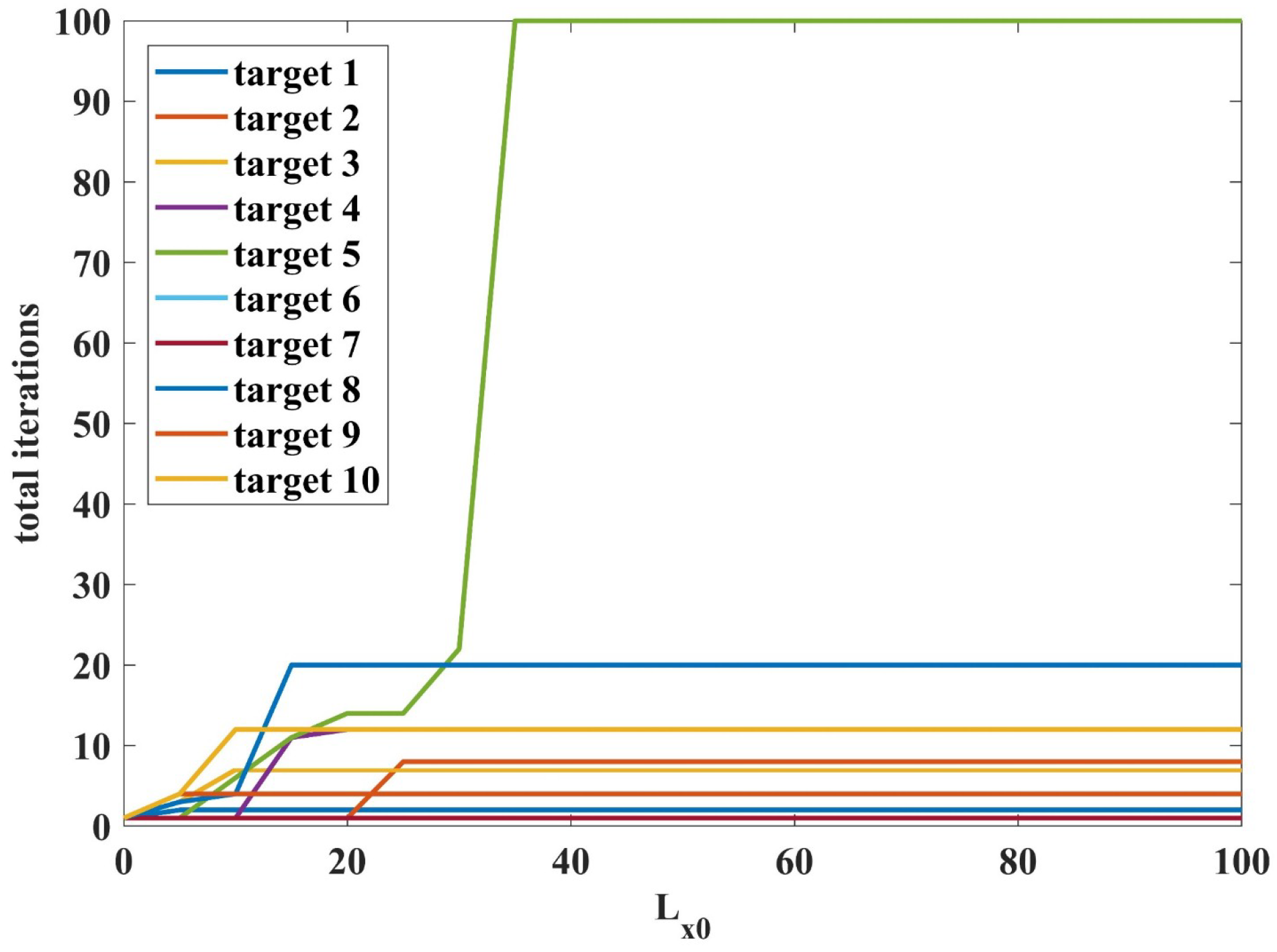
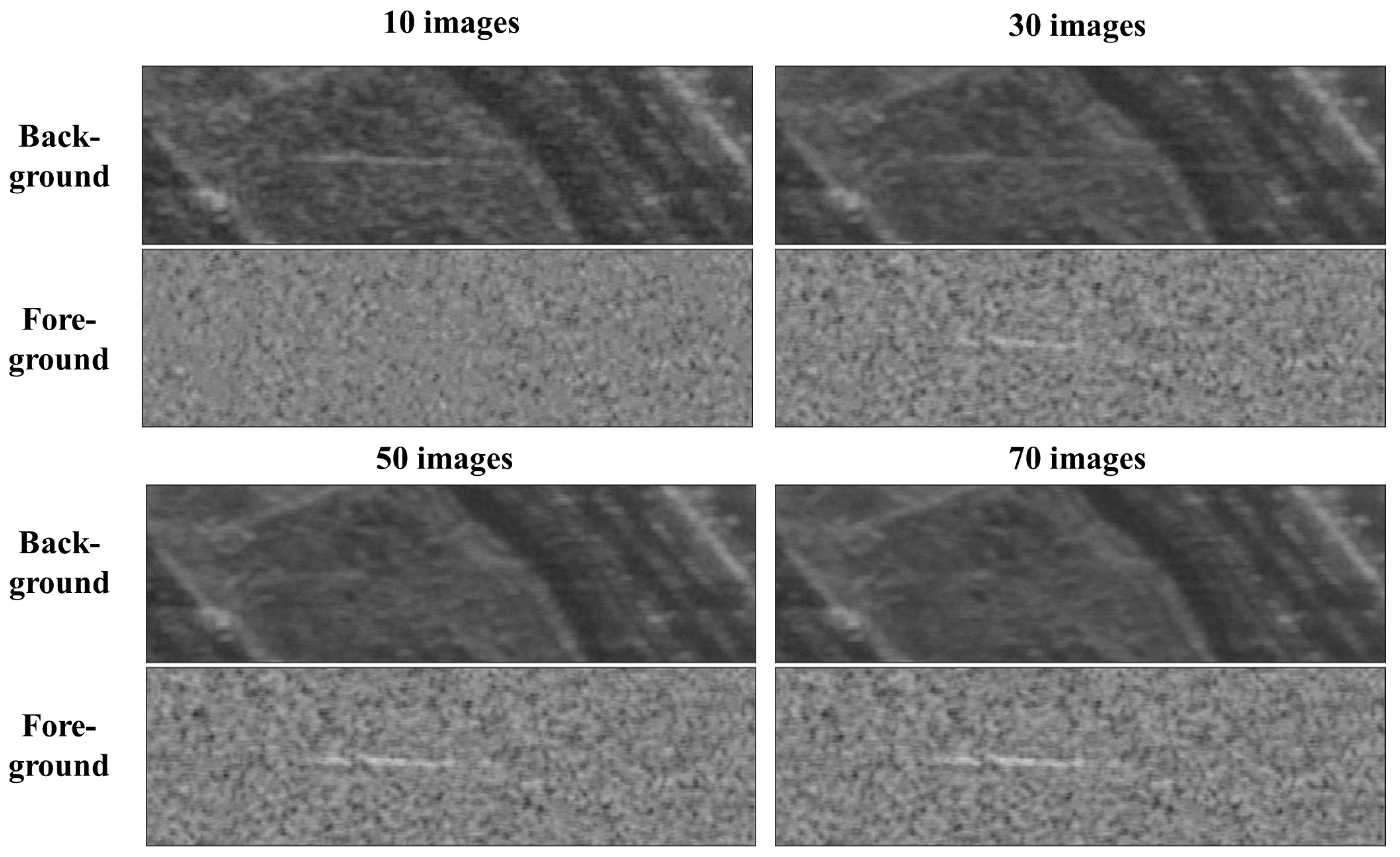
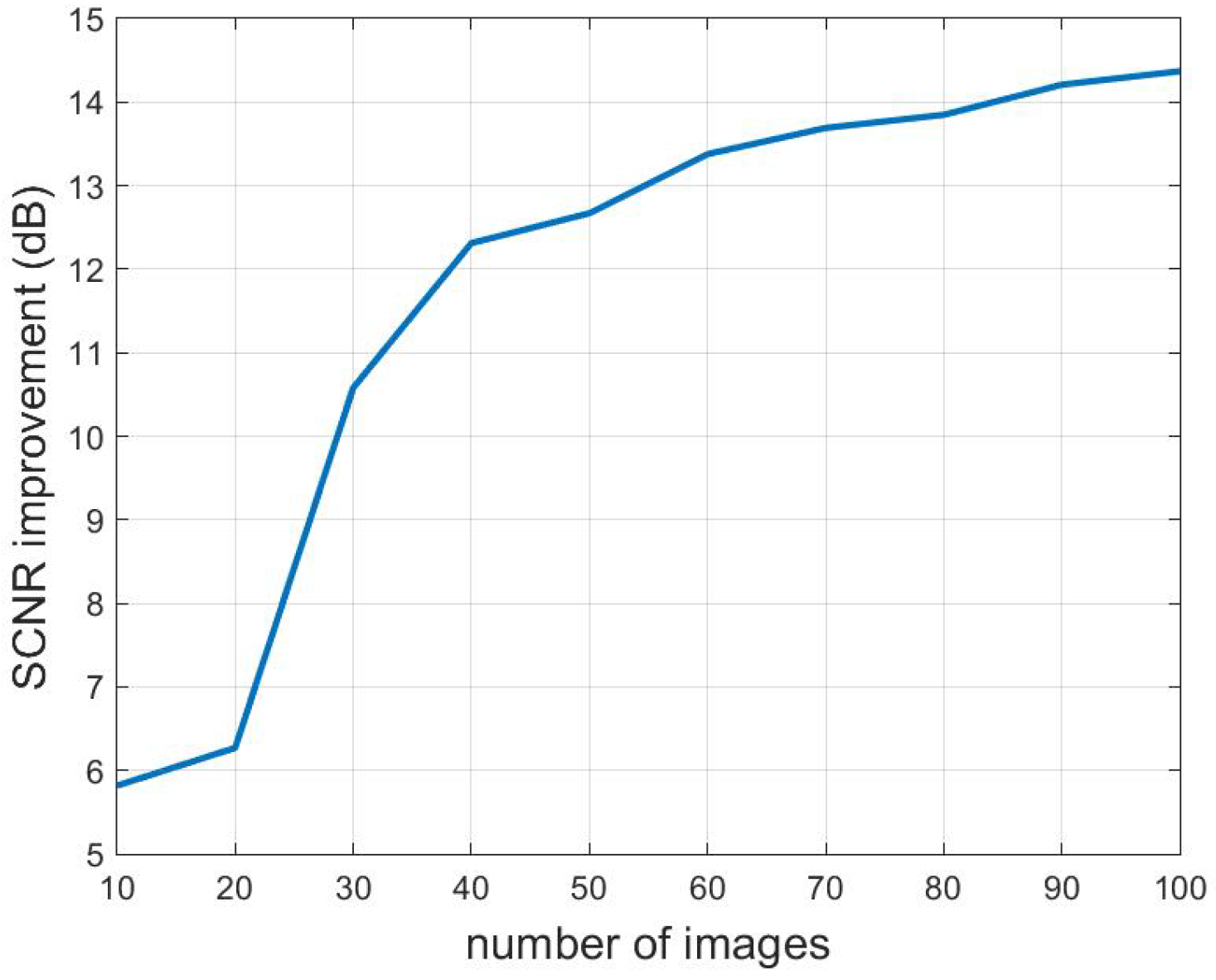
5.2. Performance Analysis on Background Image Generating and Subtraction
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Dragosevic, M.V.; Burwash, W.; Chiu, S. Detection and Estimation with RADARSAT-2 Moving-Object Detection Experiment Modes. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3527–3543. [Google Scholar] [CrossRef]
- Cerutti-Maori, D.; Sikaneta, I.; Gierull, C.H. Optimum SAR/GMTI Processing and Its Application to the Radar Satellite RADARSAT-2 for Traffic Monitoring. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3868–3881. [Google Scholar] [CrossRef]
- Baumgartner, S.V.; Krieger, G. Dual-Platform Large Along-Track Baseline GMTI. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1554–1574. [Google Scholar] [CrossRef]
- Gierull, C.H. Statistical analysis of multilook SAR interferograms for CFAR detection of ground moving targets. IEEE Trans. Geosci. Remote Sens. 2004, 42, 691–701. [Google Scholar] [CrossRef]
- Lightstone, L.; Faubert, D.; Rempel, G. Multiple phase centre DPCA for airborne radar. In Proceedings of the 1991 IEEE National Radar Conference, Los Angeles, CA, USA, 12–13 March 1991; pp. 36–40. [Google Scholar] [CrossRef]
- Makhoul, E.; Baumgartner, S.V.; Jager, M.; Broquetas, A. Multichannel SAR-GMTI in Maritime Scenarios with F-SAR and TerraSAR-X Sensors. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 5052–5067. [Google Scholar] [CrossRef]
- Pastina, D.; Turin, F. Exploitation of the COSMO-SkyMed SAR System for GMTI Applications. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 966–979. [Google Scholar] [CrossRef]
- Ouchi, K. On the multilook images of moving targets by synthetic aperture radars. IEEE Trans. Antennas Propag. 1985, 33, 823–827. [Google Scholar] [CrossRef]
- Kirscht, M. Detection and imaging of arbitrarily moving targets with single-channel SAR. IEE Proc. Radar Sonar Navig. 2003, 150, 7–11. [Google Scholar] [CrossRef]
- Henke, D.; Magnard, C.; Frioud, M.; Small, D.; Meier, E.; Schaepman, M.E. Moving-Target Tracking in Single-Channel Wide-Beam SAR. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4735–4747. [Google Scholar] [CrossRef] [Green Version]
- Shen, W.; Lin, Y.; Yu, L.; Xue, F.; Hong, W. Single Channel Circular SAR Moving Target Detection Based on Logarithm Background Subtraction Algorithm. Remote Sens. 2018, 10, 742. [Google Scholar] [CrossRef]
- Sun, J.; Yu, W.; Deng, Y. The SAR Payload Design and Performance for the GF-3 Mission. Sensors 2017, 17, 2419. [Google Scholar] [CrossRef]
- Han, B.; Ding, C.; Zhong, L.; Liu, J.; Qiu, X.; Hu, Y.; Lei, B. The GF-3 SAR Data Processor. Sensors 2018, 18, 835. [Google Scholar] [CrossRef]
- Jao, J.K. Theory of synthetic aperture radar imaging of a moving target. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1984–1992. [Google Scholar] [CrossRef] [Green Version]
- Chapman, R.D.; Hawes, C.M.; Nord, M.E. Target Motion Ambiguities in Single-Aperture Synthetic Aperture Radar. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 459–468. [Google Scholar] [CrossRef]
- Shen, W.; Lin, Y.; Chen, S.; Xue, F.; Yang, Y.; Hong, W. Apparent Trace Analysis of Moving Target with Linear Motion in Circular SAR Imagery. In Proceedings of the EUSAR 2018 12th European Conference on Synthetic Aperture Radar, Aachen, Germany, 4–7 June 2018; pp. 1–4. [Google Scholar]
- Raney, R.K. Synthetic Aperture Imaging Radar and Moving Targets. IEEE Trans. Aerosp. Electron. Syst. 1971, AES-7, 499–505. [Google Scholar] [CrossRef]
- Huynh-The, T.; Banos, O.; Lee, S.; Kang, B.H.; Kim, E.; Le-Tien, T. NIC: A Robust Background Extraction Algorithm for Foreground Detection in Dynamic Scenes. IEEE Trans. Circuits Syst. Video Technol. 2017, 27, 1478–1490. [Google Scholar] [CrossRef]
- Huynh-The, T.; Hua, C.; Tu, N.A.; Kim, D. Locally Statistical Dual-Mode Background Subtraction Approach. IEEE Access 2019, 7, 9769–9782. [Google Scholar] [CrossRef]
- Wu, Q.Z.; Jeng, B.S. Background subtraction based on logarithmic intensities. Pattern Recognit. Lett. 2002, 23, 1529–1536. [Google Scholar] [CrossRef]
- Moser, G.; Serpico, S.B. Generalized minimum-error thresholding for unsupervised change detection from SAR amplitude imagery. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2972–2982. [Google Scholar] [CrossRef] [Green Version]
- Radke, R.J.; Andra, S.; Al-Kofahi, O.; Roysam, B. Image change detection algorithms: A systematic survey. IEEE Trans. Image Process. 2005, 14, 294–307. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Lin, Y.; Hong, W.; Yu, L. Adaptive imaging of anisotropic target based on circular-SAR. Electron. Lett. 2016, 52, 1406–1408. [Google Scholar] [CrossRef]
- Gao, G.; Wang, X.; Niu, M.; Zhou, S. Modified log-ratio operator for change detection of synthetic aperture radar targets in forest concealment. J. Appl. Remote Sens. 2014, 8, 8–10. [Google Scholar] [CrossRef]
- Novak, L.M.; Owirka, G.J.; Netishen, C.M. Performance of a High-Resolution Polarimetric SAR Automatic Target Recognition System. Linc. Lab. J. 1993, 6, 1. [Google Scholar]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A Density-based Algorithm for Discovering Clusters a Density-based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the Second International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA, 2–4 August 1996; pp. 226–231. [Google Scholar]
- Selim, S.Z.; Ismail, M.A. K-Means-Type Algorithms: A Generalized Convergence Theorem and Characterization of Local Optimality. IEEE Trans. Pattern Anal. Mach. Intell. 1984, PAMI-6, 81–87. [Google Scholar] [CrossRef]
- Kovvali, N.; Banavar, M.; Spanias, A. An Introduction to Kalman Filtering with MATLAB Examples; Morgan & Claypool: San Rafael, CA, USA, 2013. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value | Symbol | Parameter | Value |
|---|---|---|---|---|---|
| Wavelength | 0.056 m | Range To Scene Center | km | ||
| Platform Velocity | 7568 m/s | Azimuth Observing Time | s | ||
| Look Angle | Aperture Width | ~ | |||
| Bandwidth | 240 MHz | Range Spacing | m | ||
| PRF | 3742.7 Hz | Azimuth Spacing | m |
| Directions | SAR | Target |
|---|---|---|
| Azimuth | ||
| Range | 0 | |
| Height | 0 |
| Parameter | Target A | Target B | Target C |
|---|---|---|---|
| 5 m/s | 0 m/s | 5 m/s | |
| 0 m/s | 5 m/s | 5 m/s | |
| 934.6 km | 934.6 km | 934.6 km |
| Track Number | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| distance (m) | 12.8 | 35.6 | 37.4 | 36.6 | 417.8 | 11.2 | 21.9 | 22.1 | 27.6 | 31.6 |
| speed (m/s) | 0.5 | 1.4 | 1.5 | 1.5 | 16.7 | 0.4 | 0.9 | 0.9 | 1.1 | 1.3 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, W.; Hong, W.; Han, B.; Wang, Y.; Lin, Y. Moving Target Detection with Modified Logarithm Background Subtraction and Its Application to the GF-3 Spotlight Mode. Remote Sens. 2019, 11, 1190. https://doi.org/10.3390/rs11101190
Shen W, Hong W, Han B, Wang Y, Lin Y. Moving Target Detection with Modified Logarithm Background Subtraction and Its Application to the GF-3 Spotlight Mode. Remote Sensing. 2019; 11(10):1190. https://doi.org/10.3390/rs11101190
Chicago/Turabian StyleShen, Wenjie, Wen Hong, Bing Han, Yanping Wang, and Yun Lin. 2019. "Moving Target Detection with Modified Logarithm Background Subtraction and Its Application to the GF-3 Spotlight Mode" Remote Sensing 11, no. 10: 1190. https://doi.org/10.3390/rs11101190
APA StyleShen, W., Hong, W., Han, B., Wang, Y., & Lin, Y. (2019). Moving Target Detection with Modified Logarithm Background Subtraction and Its Application to the GF-3 Spotlight Mode. Remote Sensing, 11(10), 1190. https://doi.org/10.3390/rs11101190