Detection of Small Target Using Schatten 1/2 Quasi-Norm Regularization with Reweighted Sparse Enhancement in Complex Infrared Scenes



Abstract
:
1. Introduction
Motivation
- (1)
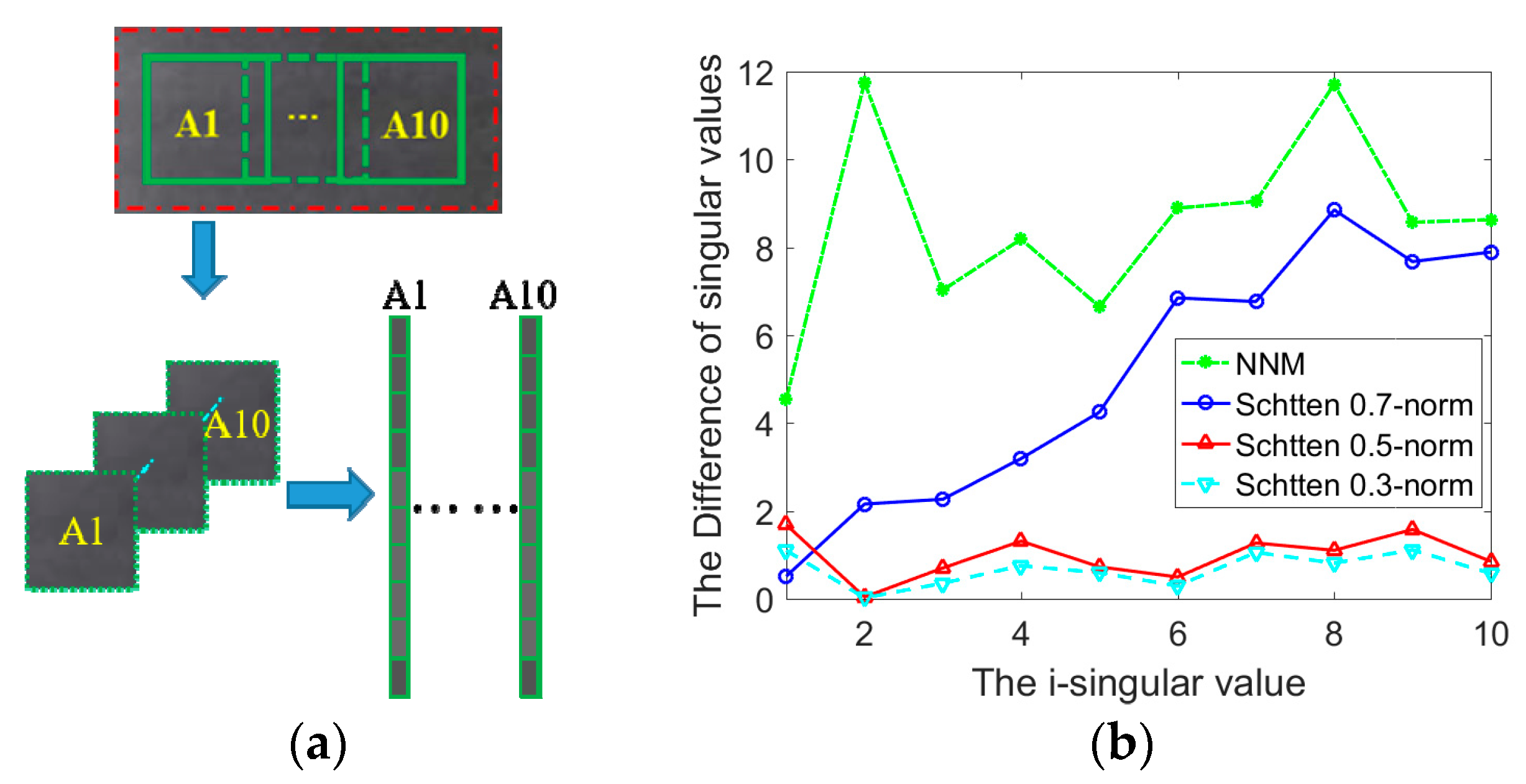
- Inspired by the nonconvex low-rank approximation, we use S1/2N regularizer, instead of the traditional nuclear norm, to constrain the background patch-image. The nonconvex regularizer could achieve a tighter approximation of original rank function, obtaining more accurate background estimation.
- (2)
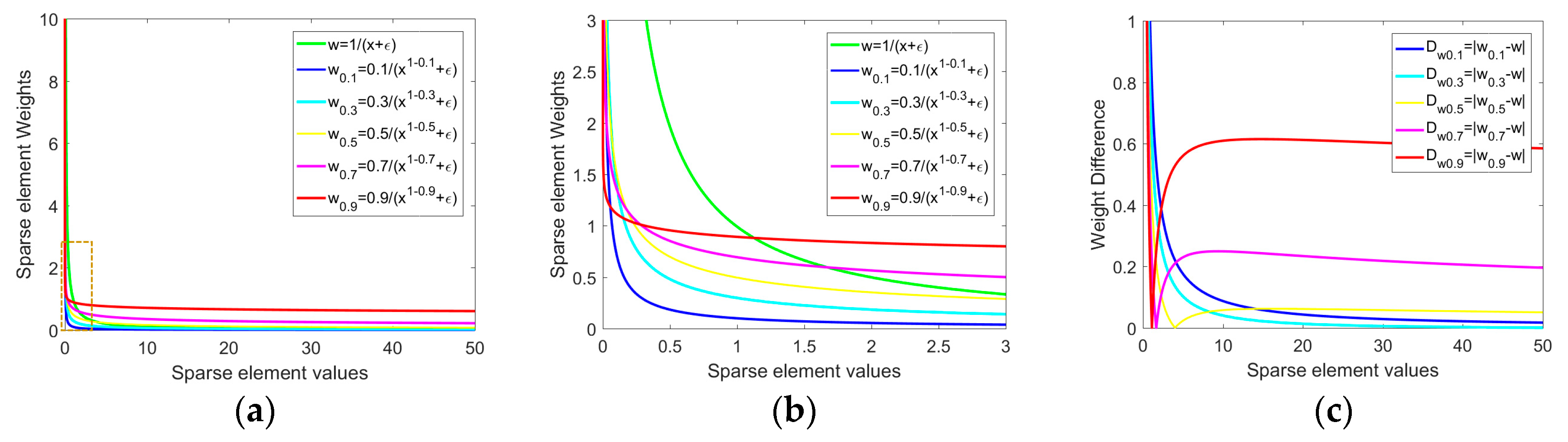
- In order to further improve the accuracy of target detection, an entry-wise weight that is different from the traditional weight is formulated. The entry-wise weight benefits to suppress the remaining salient outliers and preserve the target structure.
- (3)
- The resulted model, called reweighted S1/2N regularization infrared patch-image (RS1/2NIPI), is solved by an effective iterative algorithm based on Alternating Direction Method of Multipliers (ADMM). For the subproblem of S1/2N minimization (S1/2NM), we design a softening half-thresholding algorithm to solve it.
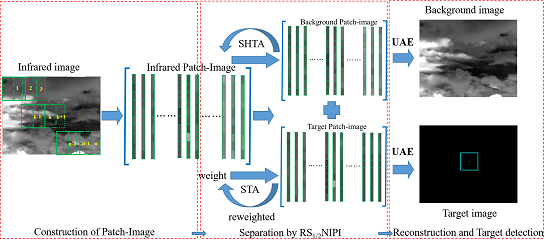
2. IPI Model
3. Small Target Detection Model via S1/2N Regularization
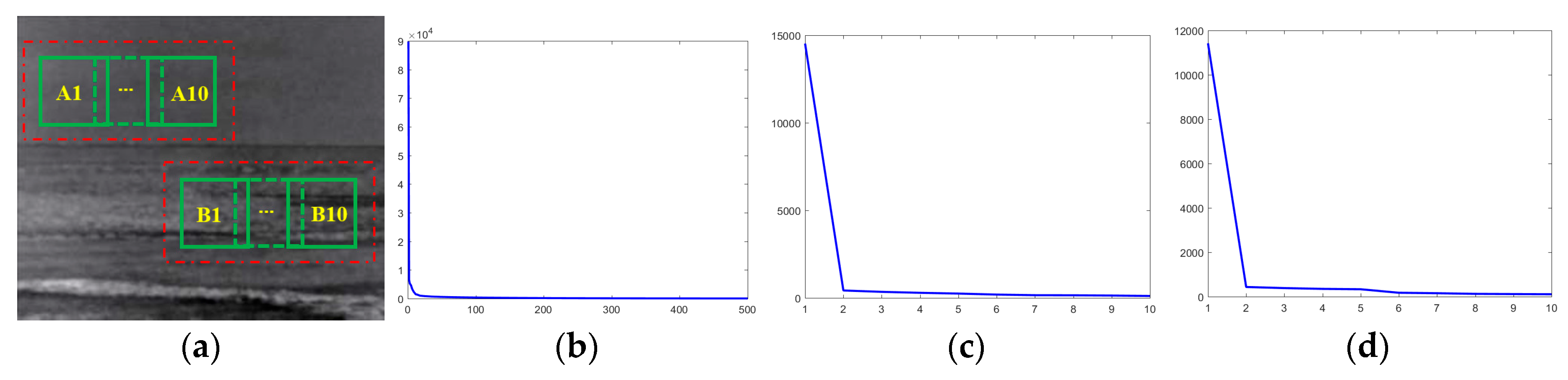
3.1. S1/2N-Induced Low-Rank Model
3.2. Reweighted S1/2NIPI Model
4. Solution of Reweighted S1/2NIPI Model
4.1. Solution of RS1/2NIPI Model
| Algorithm 1 The solution of RS1/2NIPI model using ADMM |
| 1: Input: Original patch-image D, parameter ; |
| 2: Initialize: ; ; ; ; ; ; k = 0; |
| 3: While not converged do |
| 4: Solving by |
| 5: |
| 6: Solving by |
| 7: |
| 8: Update |
| 9: |
| 10: Update , |
| 11: |
| 12: |
| 13: Check the convergence conditions |
| 14: |
| 15: Update k |
| 16: k = k + 1 |
| 17: end while |
| 18: Output: A, E; |
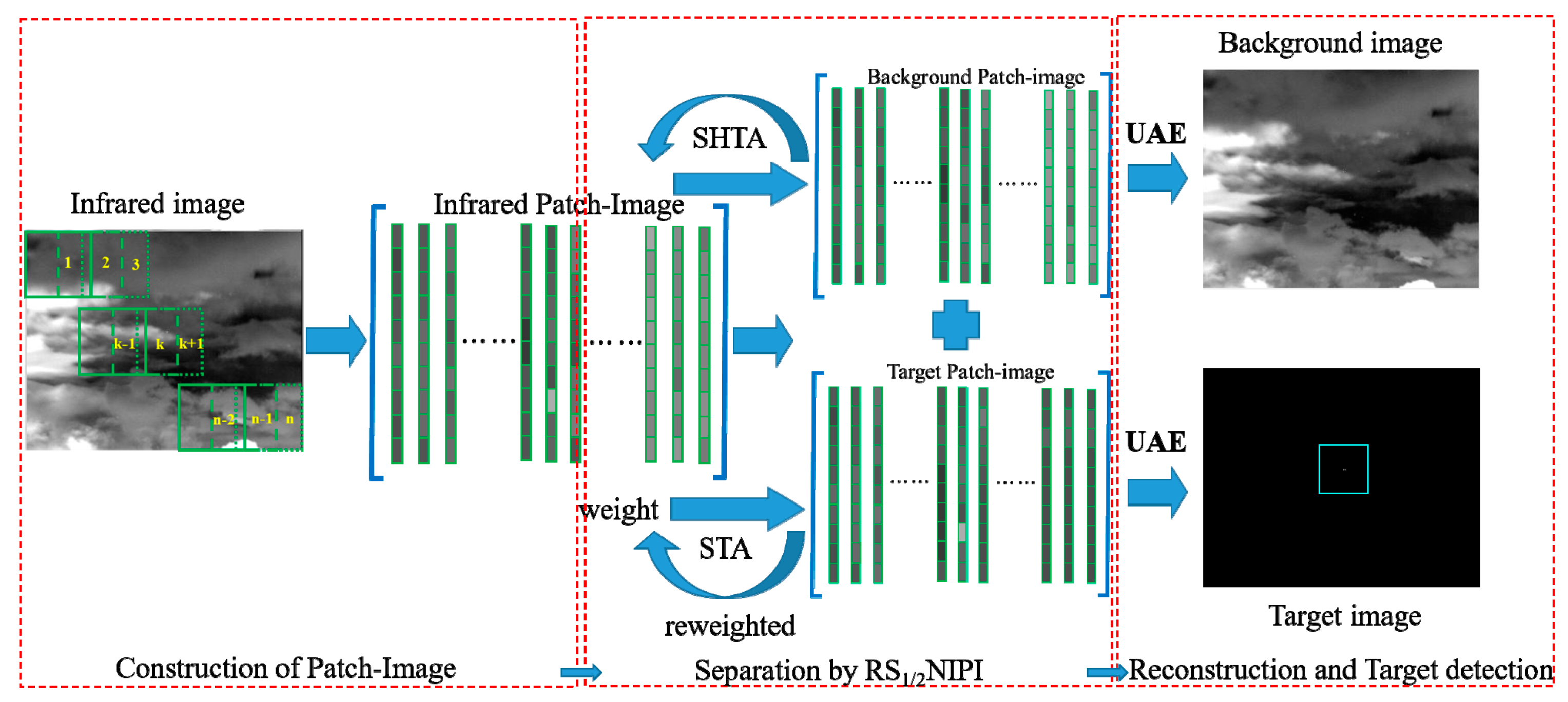
4.2. Whole Detection Procedure of the Proposed Model
- (1)
- By using the same local patch construction as IPI model, the original infrared image fD is decomposed into the infrared patch-image D.
- (2)
- Algorithm 1 is employed to perform the target-background separation.
- (3)
- By applying the uniform average of estimators (UAE) reprojection scheme, the background image fA and target image fE are reconstructed from the background patch-image A and target patch-image E.
- (4)
- The final target is separated by an adaptive threshold, which is determined by:where and are the mean value and standard deviation of the target image fE, respectively. c and are constants determined experientially.
5. Experimental Analysis
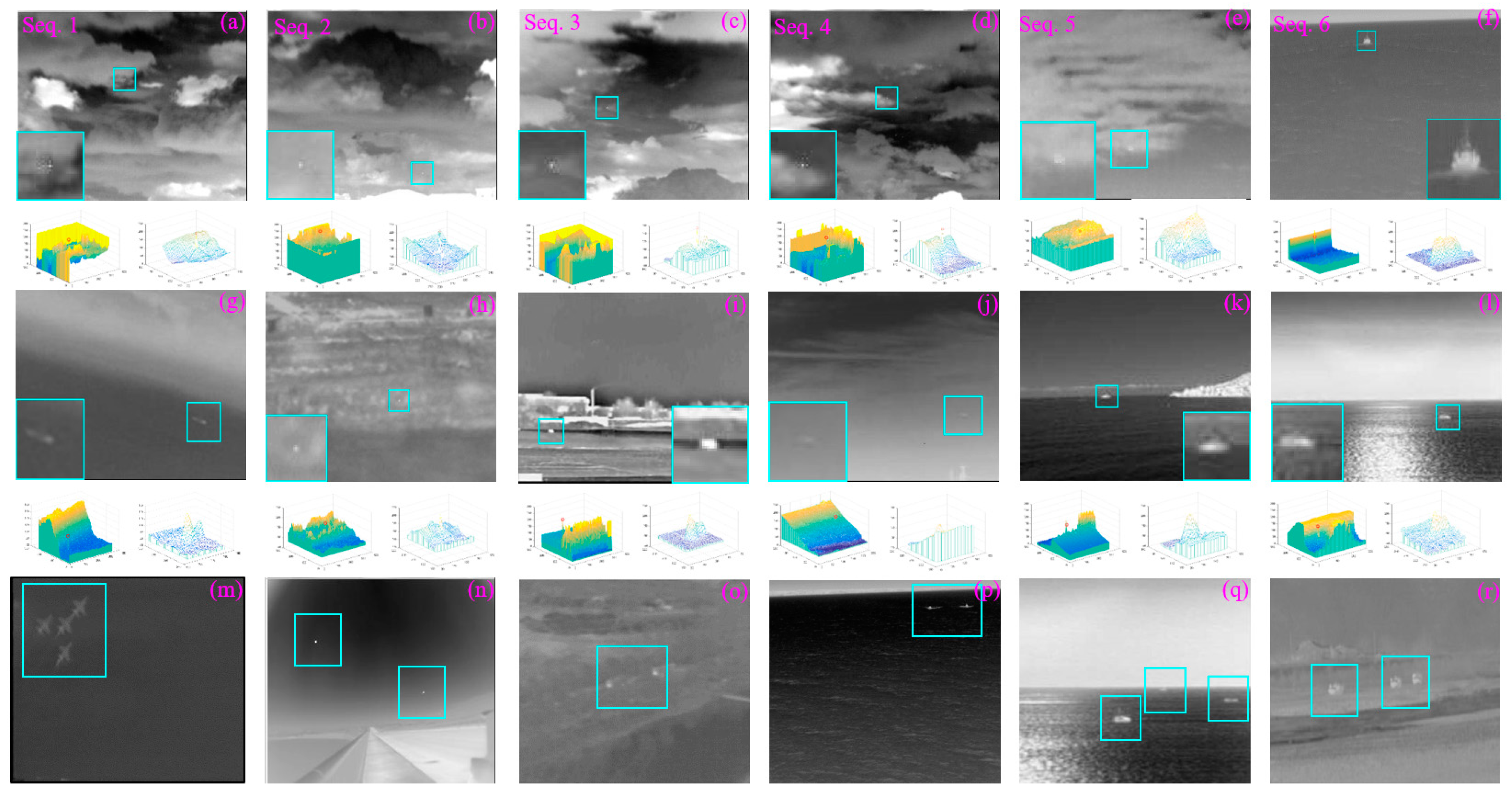
5.1. Datasets and Evaluation Criterions
5.2. The Performance Analysis of the Proposed Model
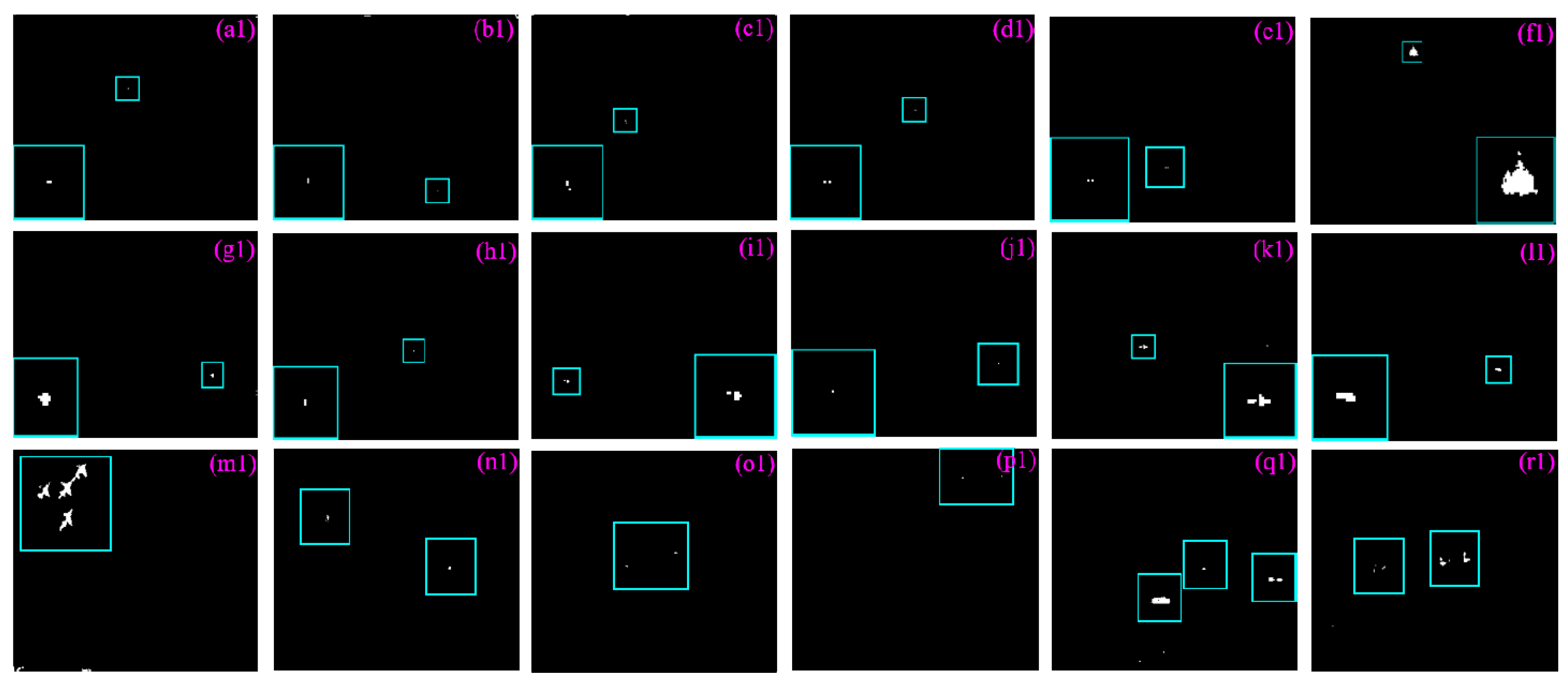
5.2.1. Evaluation on Single and Multiple Targets Images
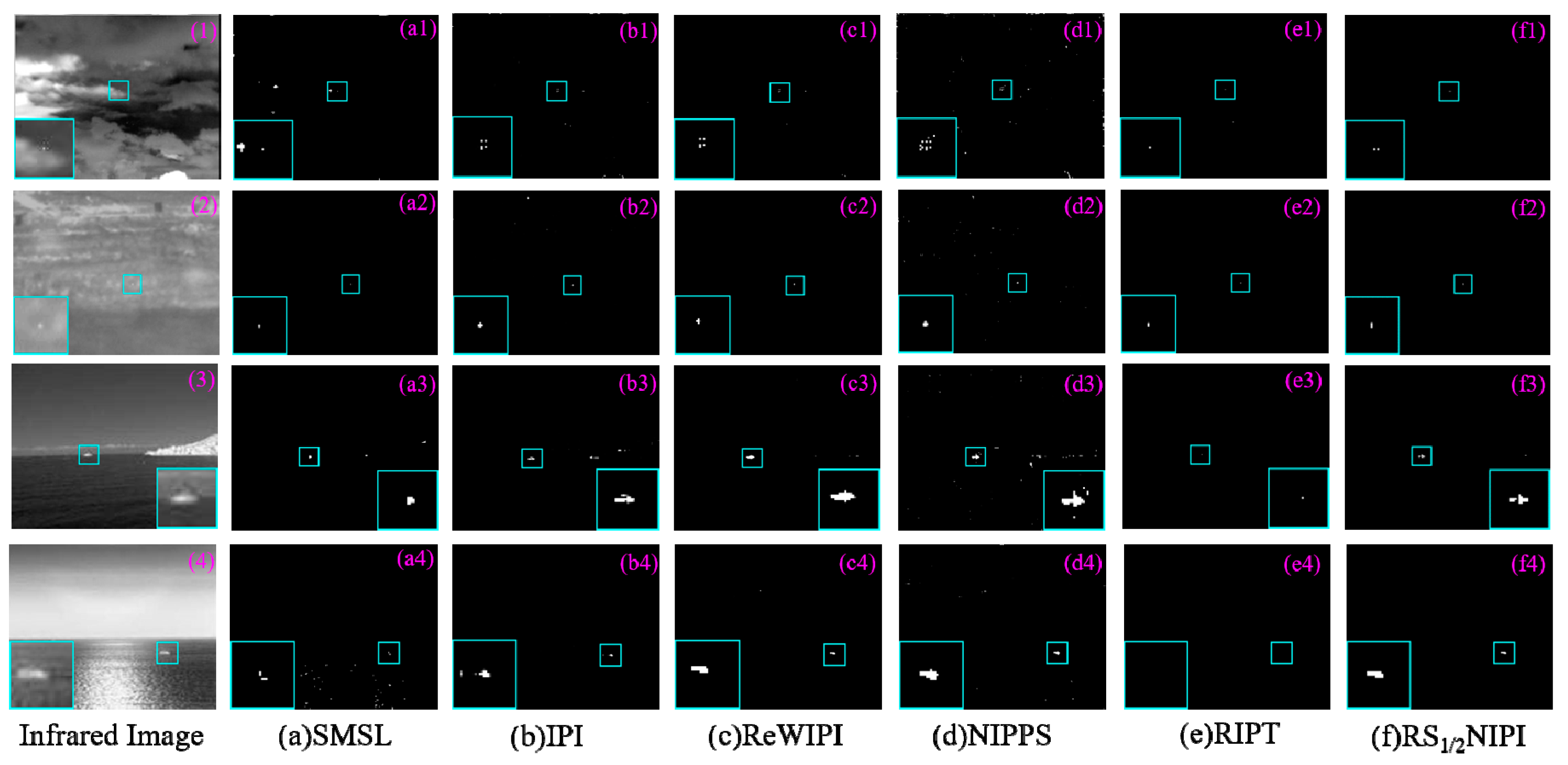
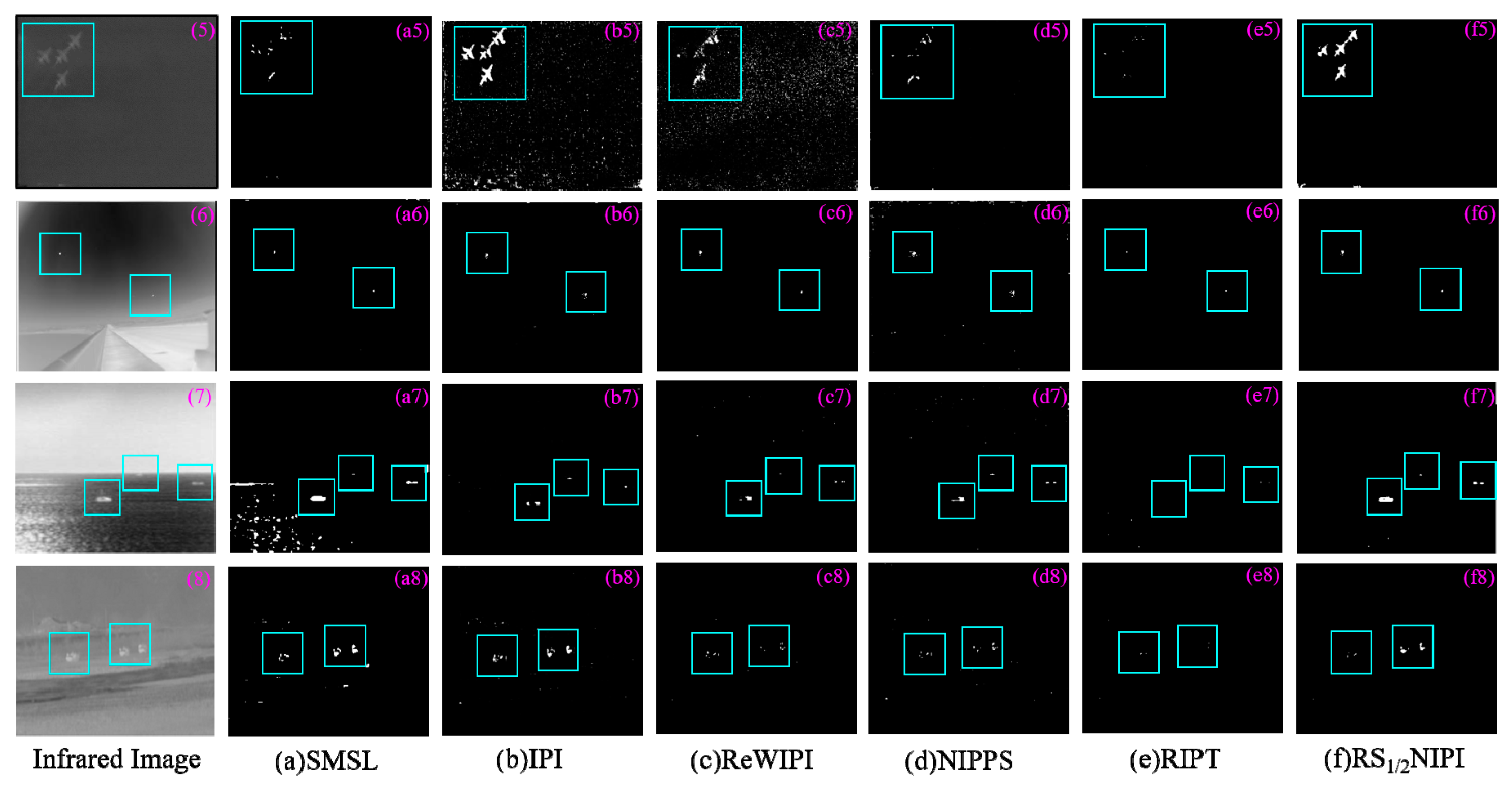
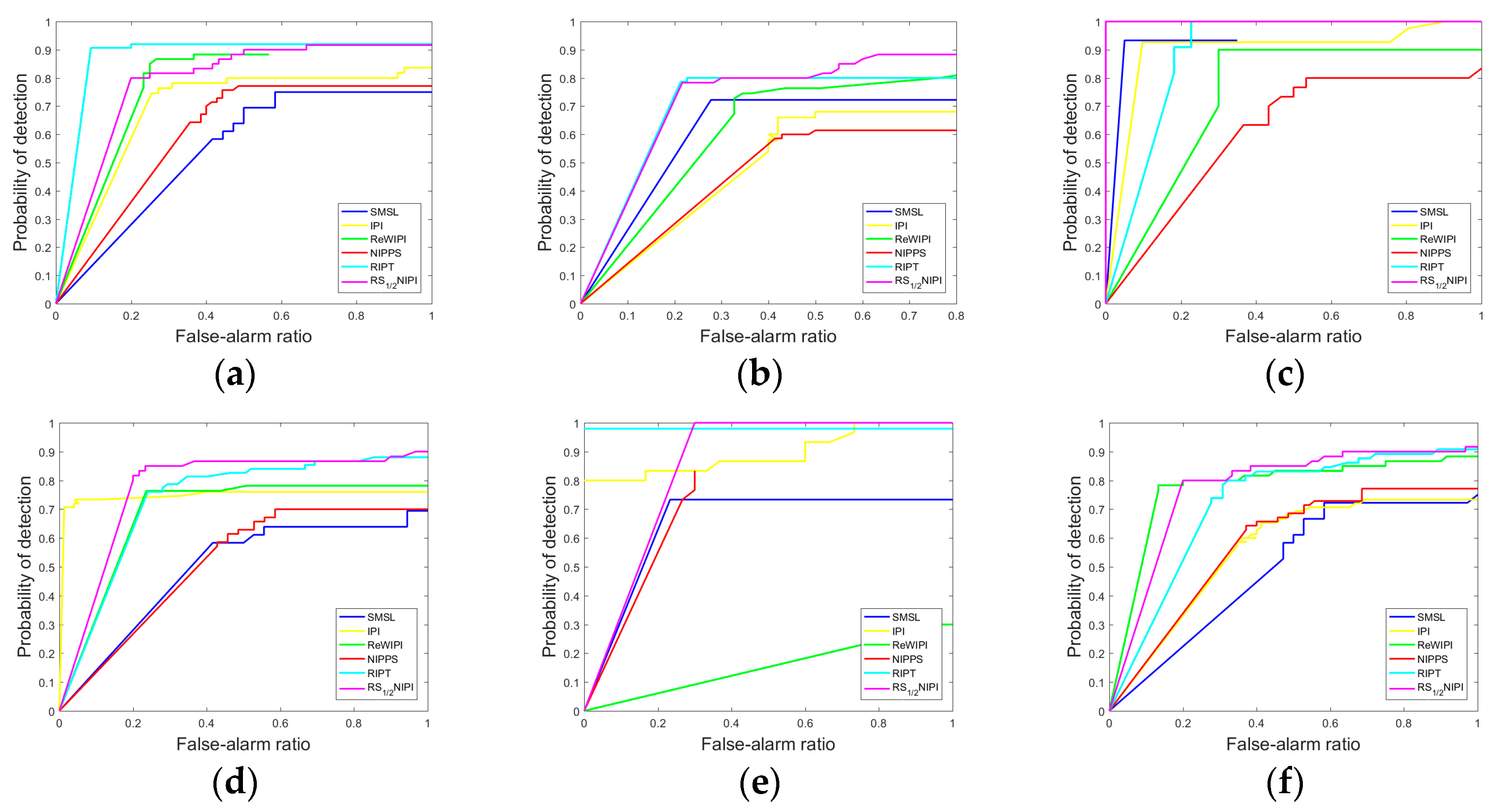
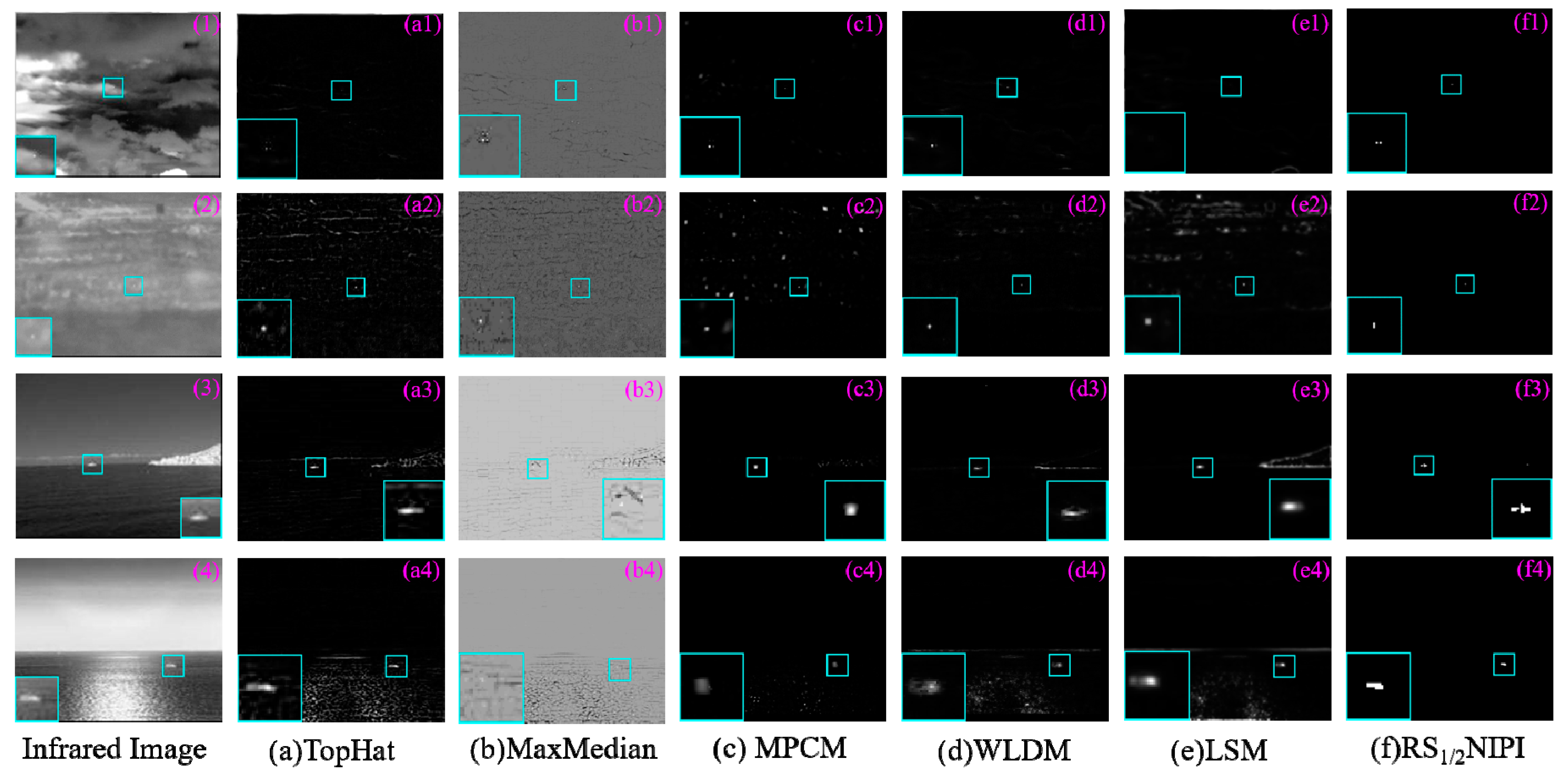
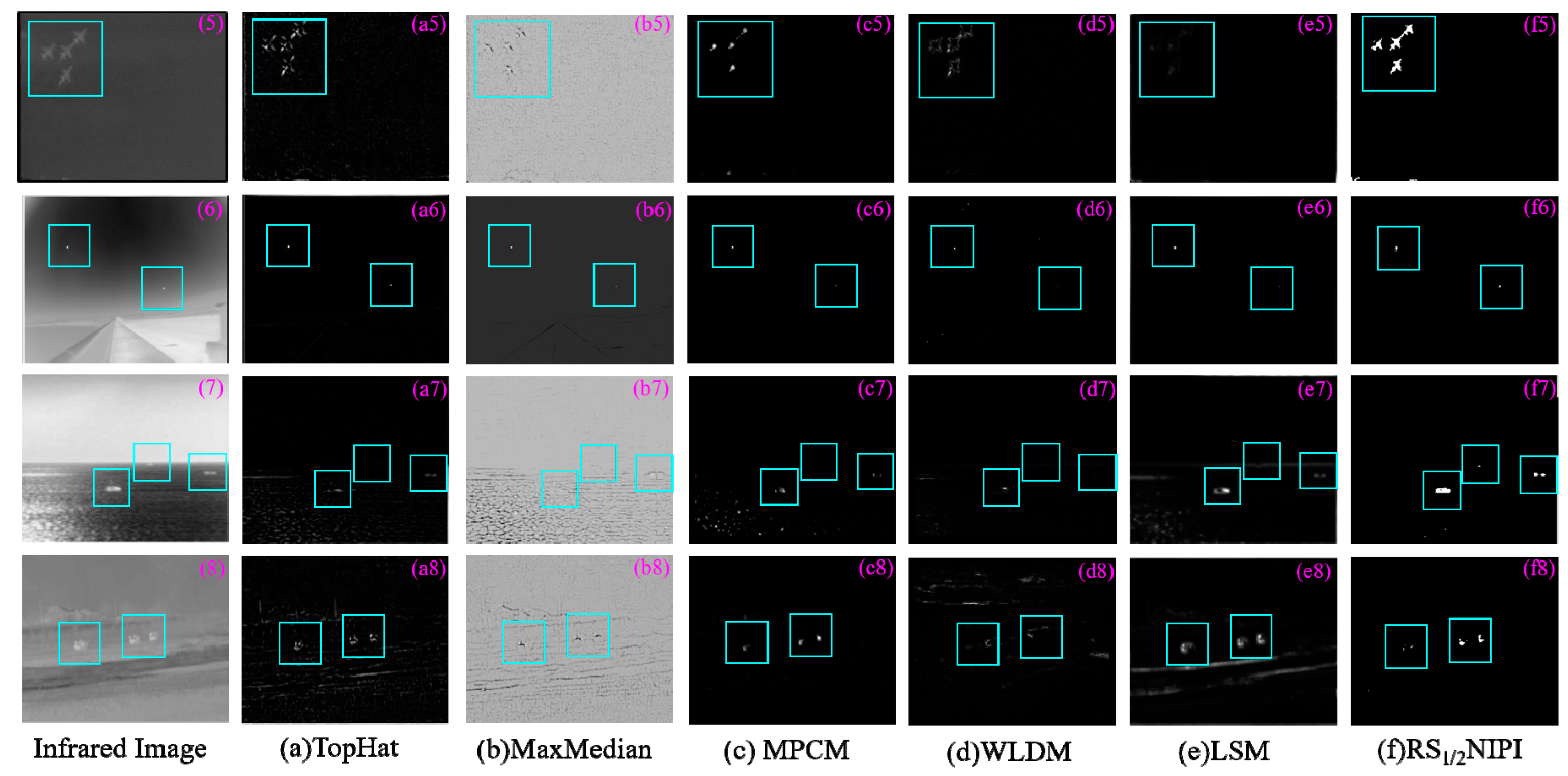
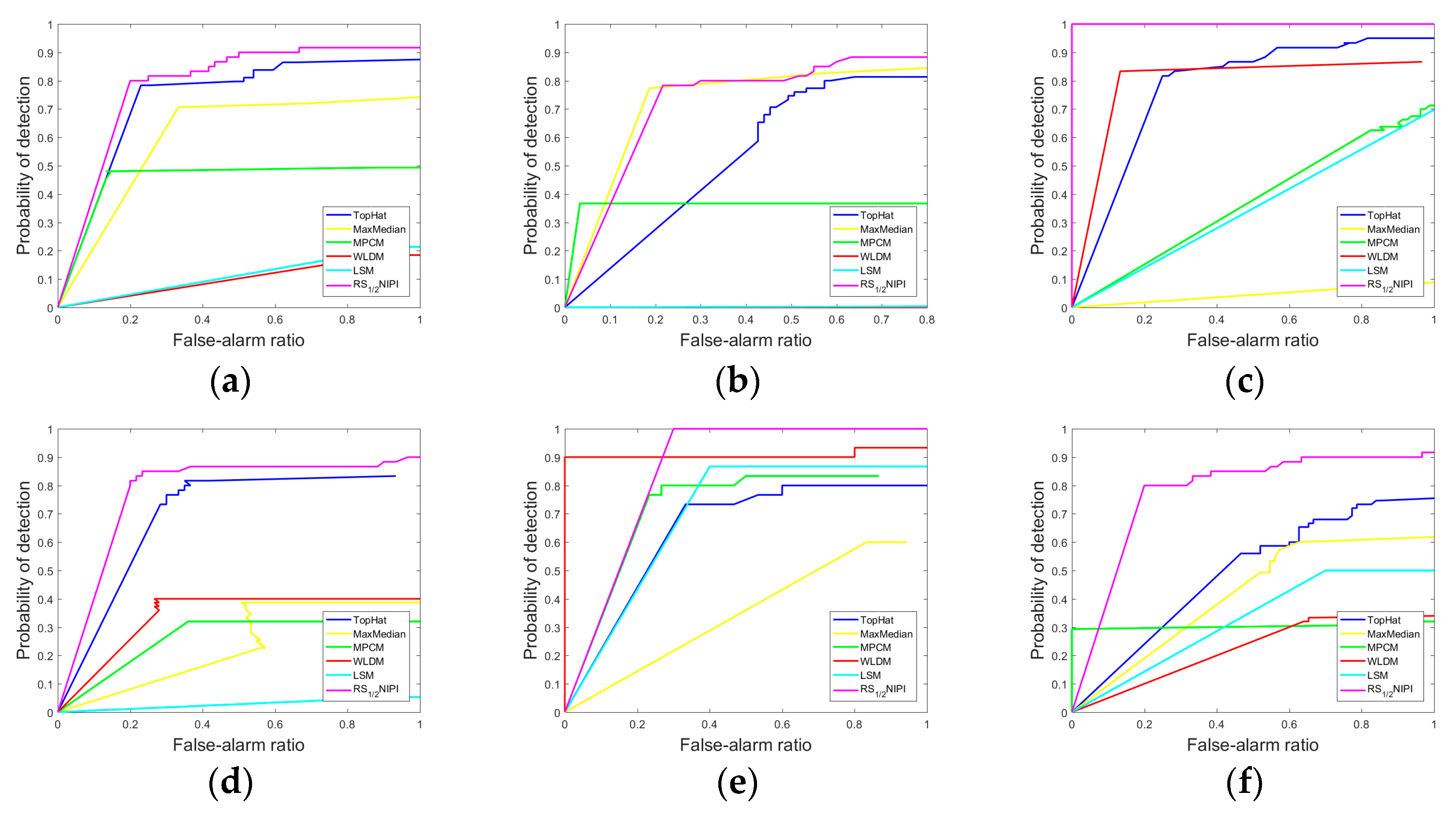
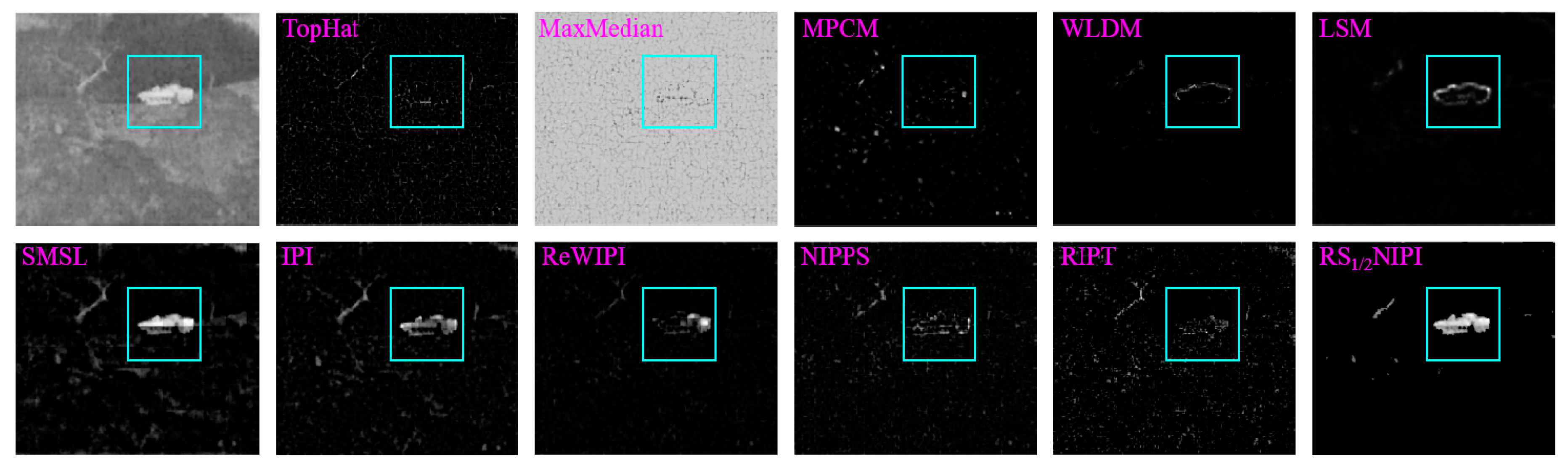
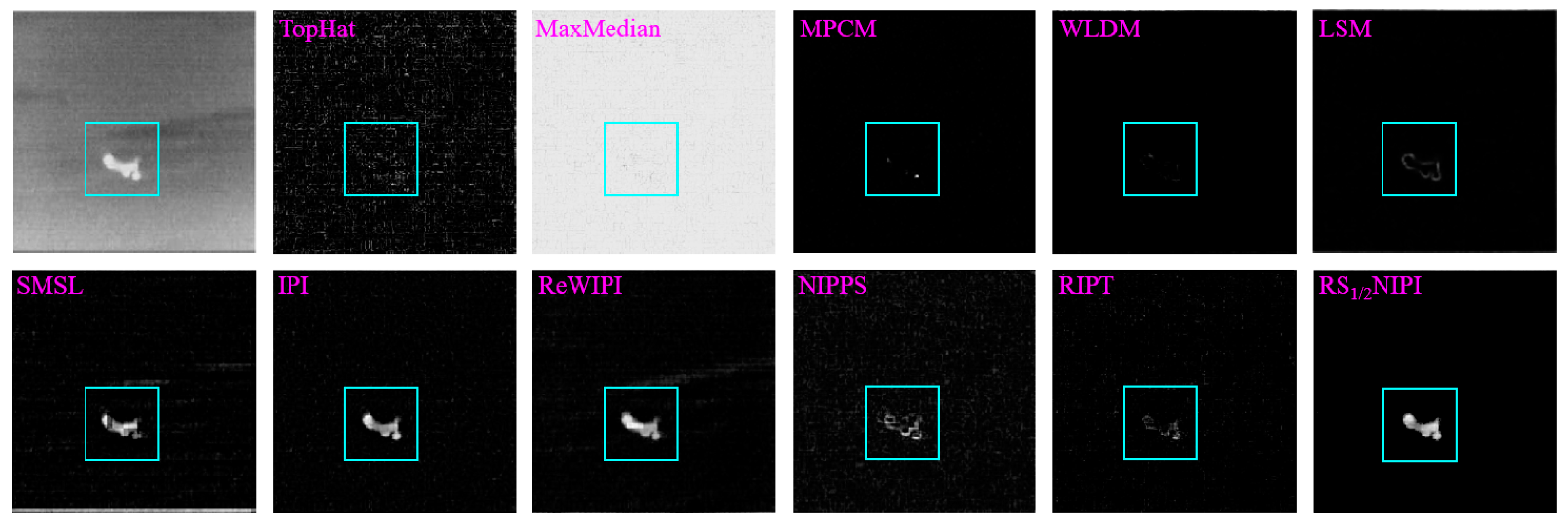
5.2.2. Comparison to the State-of-the-Art Methods
5.2.3. Evaluation on Structurally Sparse Target Scenes
5.3. Discussion
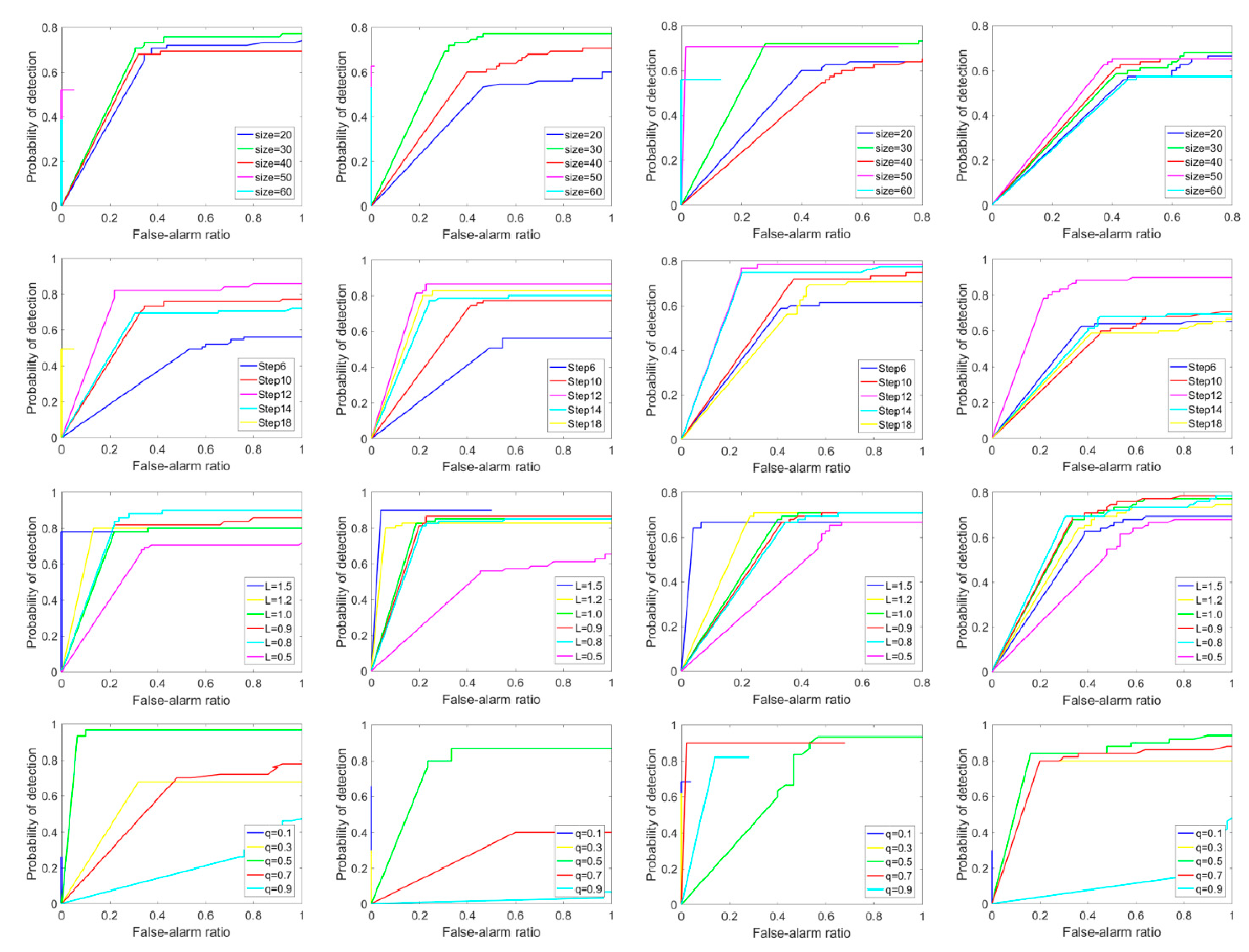
5.3.1. The Effect of Different Parameters
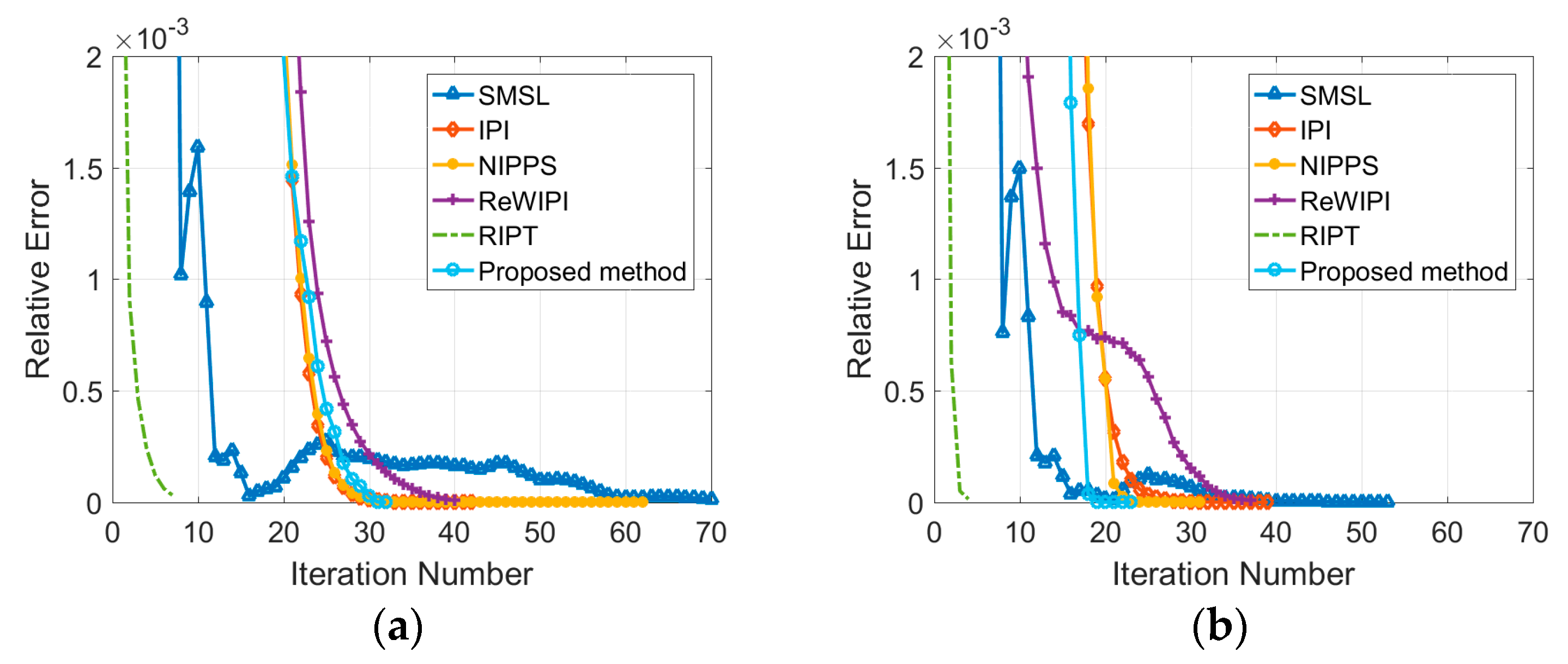
5.3.2. Convergence and Time-Consuming Analysis
6. Algorithm Advantage and Limitation Analysis
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bai, X.Z.; Chen, Z.; Zhang, Y.; Liu, Z.; Lu, Y. Infrared ship target segmentation based on spatial information improved FCM. IEEE Trans. Cybern. 2016, 46, 3259–3271. [Google Scholar] [CrossRef] [PubMed]
- Gao, J.L.; Wen, C.L.; Liu, M.Q. Robust small target co-detection from airborne infrared image sequences. Sensors 2017, 17, 2242. [Google Scholar] [CrossRef]
- Deng, H.; Sun, X.P.; Zhou, X. A multiscale fuzzy metric for detecting small infrared targets against chaotic cloudy/sea-sky backgrounds. IEEE Trans. Cybern. 2018, 99, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Bai, X.Z.; Bi, Y.G. Derivative entropy-based contrast measure for infrared small-target detection. IEEE Trans. Geosci. Remote Sens. 2018, 99, 1–15. [Google Scholar] [CrossRef]
- Gao, C.Q.; Wang, L.; Xiao, Y.X.; Zhao, Q.; Meng, D.Y. Infrared small-dim target detection based on Markov random field guided noise modeling. Pattern Recogn. 2018, 76, 463–475. [Google Scholar] [CrossRef]
- Dong, L.L.; Wang, B.; Ming, Z.; Xu, W.H. Robust infrared maritime target detection based on visual attention and spatiotemporal filtering. IEEE Trans. Geosci. Remote Sens. 2017, 99, 1–14. [Google Scholar] [CrossRef]
- Chang, H.; Yuan, L.; Ramakant, N. Multiple target tracking by learning-based hierarchical association of detection responses. IEEE Trans. Pattern Anal. 2013, 35, 898–910. [Google Scholar]
- Kim, S.; Lee, J. Scale Invariant small target detection by optimizing signal-to-clutter ratio in heterogeneous background for infrared search and track. Pattern Recogn. 2012, 45, 393–406. [Google Scholar] [CrossRef]
- Deshpande, S.D.; Meng, H.E.; Ronda, V.; Chan, P. Max-mean and Max-median filters for detection of small-targets. Proc. SPIE Int. Soc. Opt. Eng. 1999, 3809, 74–83. [Google Scholar]
- Hadhoud, M.M.; Thomas, D.W. The Two-Dimensional Adaptive LMS (TDLMS) algorithm. IEEE Trans. Circuits Syst. 1988, 35, 485–494. [Google Scholar] [CrossRef]
- Baem, T.W.; Zhang, F.; Kweon, I.S. Edge directional 2D LMS filter for infrared small target detection. Infrared Phys. Technol. 2012, 55, 137–145. [Google Scholar]
- Zhao, Y.; Pan, H.; Du, C.; Peng, Y.; Zheng, Y. Bilateral two dimensional least mean square filter for infrared small target detection. Infrared Phys. Technol. 2014, 65, 17–23. [Google Scholar] [CrossRef]
- Zeng, M.; Li, J.; Peng, Z. The design of top-hat morphological filter and application to infrared target detection. Infrared Phys. Technol. 2006, 48, 67–76. [Google Scholar] [CrossRef]
- Bai, X.Z.; Zhou, F.G. Analysis of new top-hat transformation and the application for infrared dim small target detection. Pattern Recogn. 2010, 43, 2145–2156. [Google Scholar] [CrossRef]
- Peng, L.B.; Zhang, T.F.; Liu, Y.H.; Li, M.H.; Peng, Z.M. Infrared dim target detection using shearlet’s kurtosis maximization under non-uniform background. Symmetry 2019, 11, 732. [Google Scholar] [CrossRef]
- Chen, C.L.; Li, H.; Wei, Y.T.; Xia, T.; Tang, Y.Y. A local contrast method for small infrared target detection. IEEE Trans. Geosci. Remote Sens. 2013, 52, 574–581. [Google Scholar] [CrossRef]
- Han, J.H.; Ma, Y.; Zhou, B.; Fan, F.; Liang, K.; Fang, Y. A robust infrared small target detection algorithm based on human visual system. IEEE Geosci. Remote Sens. 2014, 11, 2168–2172. [Google Scholar]
- Qin, Y.; Li, B. Effective infrared small target detection utilizing a novel local contrast method. IEEE Geosci. Remote Sens. 2016, 99, 1–5. [Google Scholar] [CrossRef]
- Han, J.H.; Liang, K.; Zhou, B.; Zhu, X.Y.; Zhao, J.; Zhao, L.L. Infrared small target detection utilizing the multiscale relative local contrast measure. IEEE Geosci. Remote Sens. 2018, 15, 612–616. [Google Scholar] [CrossRef]
- Chen, Y.W.; Xin, Y.H. An efficient infrared small target detection method based on visual contrast mechanism. IEEE Geosci. Remote Sens. 2016, 13, 962–966. [Google Scholar] [CrossRef]
- Deng, H.; Sun, X.P.; Liu, M.L.; Ye, C.H.; Zhou, X. Small infrared target detection based on weighted local difference measure. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4204–4214. [Google Scholar] [CrossRef]
- Wei, Y.T.; You, X.G.; Li, H. Multiscale patch-based contrast measure for small infrared target detection. Pattern Recogn. 2016, 58, 216–226. [Google Scholar] [CrossRef]
- Nie, J.Y.; Qu, S.C.; Wei, Y.T.; Zhang, L.M.; Deng, L.Z. An infrared small target detection method based on multiscale local homogeneity measure. Infrared Phys. Technol. 2018, 90, 186–194. [Google Scholar] [CrossRef]
- Wei, Y.T.; You, X.G.; Deng, H. Small infrared target detection based on image patch ordering. Int. J. Wavelets. Multi. 2016, 14, 1640007. [Google Scholar] [CrossRef]
- Deng, H.; Sun, X.; Liu, M.; Ye, C.; Zhou, X. Entropy-based window selection for detecting dim and small infrared targets. Pattern Recogn. 2017, 61, 66–77. [Google Scholar] [CrossRef]
- Deng, H.; Sun, X.P.; Liu, M.L.; Ye, C.H.; Zhou, X. Infrared small-target detection using multiscale gray difference weighted image entropy. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 60–72. [Google Scholar] [CrossRef]
- Shirvaikar, M.V.; Trivedi, M.M. A neural network filter to detect small targets in high clutter backgrounds. IEEE Trans. Neural. Net. Lear. 2002, 6, 252–257. [Google Scholar] [CrossRef]
- Takeki, A.; Tu, T.T.; Yoshihashi, R.; Kawakami, R.; Iida, M.; Naemura, T. Combining deep features for object detection at various scales: Finding small birds in landscape images. IPSJ Trans. Comput. Vis. Appl. 2016, 8, 5. [Google Scholar] [CrossRef]
- Bi, Y.G.; Bai, X.Z.; Jin, T.; Guo, S. Multiple feature snalysis for infrared small target detection. IEEE Geosci. Remote Sens. 2017, 14, 1333–1337. [Google Scholar] [CrossRef]
- Qin, Y.; Bruzzone., L.; Gao, C.Q.; Li, B. Infrared small target detection based on facet kernel and random walker. IEEE Trans. Geosci. Remote Sens. 2019, 99, 1–15. [Google Scholar] [CrossRef]
- Xia, C.Q.; Li, X.R.; Zhao, L.Y. Infrared small target detection via modified random walks. Remote Sens. 2018, 10, 2004. [Google Scholar] [CrossRef]
- Gao, C.Q.; Meng, D.Y.; Yang, Y.; Wang, Y.T.; Zhou, X.F.; Hauptmann, A.G. Infrared patch-image model for small target detection in a single image. IEEE Trans. Image Process. 2013, 22, 4996–5009. [Google Scholar] [CrossRef] [PubMed]
- Guo, J.; Wu, Y.Q.; Dai, Y.M. Small target detection based on reweighted infrared patch-image model. IET Image Process. 2018, 12, 70–79. [Google Scholar] [CrossRef]
- Dai, Y.M.; Wu, Y.Q. Reweighted infrared patch-tensor model with both nonlocal and local priors for single-frame small target detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3752–3767. [Google Scholar] [CrossRef]
- Zhang, L.D.; Peng, Z.M. Infrared small target detection based on partial sum of the tensor nuclear norm. Remote Sens. 2019, 11, 382. [Google Scholar] [CrossRef]
- Wang, X.Y.; Peng, Z.M.; Kong, D.H.; He, Y.M. Infrared dim and small target detection based on stable multisubspace learning in heterogeneous scenes. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5481–5493. [Google Scholar] [CrossRef]
- He, Y.J.; Li, M.; Zhang, J.L.; An, Q. Small infrared target detection based on low-rank and sparse representation. Infrared Phys. Technol. 2015, 68, 98–109. [Google Scholar] [CrossRef]
- Candes, E.J.; Wakin, M.B.; Boyd, S.P. Enhancing sparsity by reweighted l1 minimization. J. Fourier. Anal. Appl. 2008, 14, 877–905. [Google Scholar] [CrossRef]
- Hu, Y.; Zhang, D.B.; Ye, J.P.; Li, X.L.; He, X.F. Fast and accurate matrix completion via truncated nuclear norm regularization. IEEE Trans. Pattern Anal. 2013, 35, 2117–2130. [Google Scholar] [CrossRef]
- Oh, T.H.; Tai, Y.W.; Bazin, J.C.; Kim, H.; Kweon, I.S. Partial sum minimization of singular values in robust PCA: Algorithm and applications. IEEE Trans. Pattern Anal. 2016, 38, 744–758. [Google Scholar] [CrossRef]
- Nie, F.; Huang, H.; Ding, C. Low-rank matrix recovery via efficient schatten p-norm minimization. In Proceedings of the Twenty-Sixth AAAI Conference on Artificial Intelligence, Toronto, ON, Canada, 22–26 July 2012; pp. 655–661. [Google Scholar]
- Dai, Y.M.; Wu, Y.Q.; Song, Y.; Guo, J. Non-negative infrared patch-image model: Robust target-background separation via partial sum minimization of singular values. Infrared Phys. Technol. 2017, 81, 182–194. [Google Scholar] [CrossRef]
- Zhang, L.D.; Peng, L.B.; Zhang, T.F.; Gao, S.Y.; Peng, Z.M. Infrared small target detection via non-convex rank approximation minimization joint l2,1 norm. Remote Sens. 2018, 10, 1821. [Google Scholar] [CrossRef]
- Zhang, T.F.; Wu, H.; Liu, Y.H.; Peng, L.B.; Yang, C.P.; Peng, Z.M. Infrared small target detection based on non-convex optimization with Lp-norm constraint. Remote Sens. 2019, 11, 559. [Google Scholar] [CrossRef]
- Wright, J.; Ganesh, A.; Rao, S.; Ma, Y. Robust principal component analysis: Exact recovery of corrupted low-rank matrices via convex optimization. In Neural Information Processing Systems (NIPS); The MIT Press: Cambridge, MA, USA, 2009; Volume 58, pp. 289–298. [Google Scholar]
- Boyd, S.; Parikh, N.; Chu, E. Distributed optimization and statistical learning via the alternating direction method of multipliers. Found. Trends Mach. Learn. 2011, 3, 1–122. [Google Scholar] [CrossRef]
- Liu, L.; Huang, W.; Chen, D.R. Exact minimum rank approximation via schatten p-norm minimization. J. Comput. Appl. Math. 2014, 267, 218–227. [Google Scholar] [CrossRef]
- Xu, Z.B.; Chang, X.; Xu, F.; Zhang, H. L1/2 regularization: A thresholding representation theory and a fast solver. IEEE Trans. Neur. Net. Learn. 2012, 23, 1013–1027. [Google Scholar]
- Rao, G.; Peng, Y.; Xu, Z.B. Robust sparse and low-rank matrix decomposition based on S1/2 modeling. Sci. Sin. 2013, 43, 733. [Google Scholar] [CrossRef]
- Hale, E.T.; Yin, W.; Zhang, Y. Fixed-point continuation for l1-minimization: Methodology and convergence. Siam J. Optim. 2008, 19, 1107–1130. [Google Scholar] [CrossRef]
- Bruckstein, A.M.; Donoho, D.L.; Elad, M. From sparse solutions of systems of equations to sparse modeling of signals and images. SIAM Rev. 2009, 51, 34–81. [Google Scholar] [CrossRef]
- Zeng, J.; Lin, S.; Wang, Y.; Xu, Z.B. L1/2 regularization: Convergence of iterative half thresholding algorithm. IEEE Trans. Signal. Process. 2013, 62, 2317–2329. [Google Scholar] [CrossRef]
- Daubechies, I.; Defrise, M.; De Mol, C. An iterative thresholding algorithm for linear inverse problems with a sparsity constraint. Commun. Pure Appl. Math. 2003, 57, 1413–1457. [Google Scholar] [CrossRef]
- He, B.; Yuan, X. On the O(1/n) convergence rate of the douglas--rachford alternating direction method. SIAM J. Numer. Anal. 2012, 50, 700–709. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sequences | Frames/Size | Target Description | Background Description |
|---|---|---|---|
| Sequences 1–4 | 400/ | Single tiny round-shape target. Moves along the clutters edges or buried in the clutters. Significant change of brightness. | Sky scene with strong undulant clutters. Brightness of background varies dramatically. Overall background changes slowly. |
| Sequence 5 | 30/ | Single tiny rectangular shape target. Size and shape are almost unchanged. Relatively low signal-to-clutter. | Deep space with floccus clouds. Without bright interference in the background. Approximately noise-free. |
| Sequence 6 | 400/ | One target with irregular shape. Moving slowly during the sequence. Size and shape vary over a wide range. | Uniform sea-sky backgrounds with strong ocean waves. |
| Single image (g–r) | , , , etc. | Different target number, size and types. Contrast changes drastically. | Different background types, such as cloud clutter, aerial maritime, heavy sea fog. |
| Model | Objective Function | Parameter Settings |
|---|---|---|
| SMSL [36] | patch size: , , | |
| IPI [32] | patch size: , sliding size: 10, , , | |
| ReWIPI [33] | patch size: , sliding size: 10, , , , , , | |
| NIPPS [42] | patch size: , sliding size: 10, , , energy constraint ratio: | |
| RIPT [34] | patch size: or ,sliding size: 10, , , h = 10, , | |
| RS1/2NIPI | patch size: or , sliding size: 12, , , |
| Methods | Indicators | Sequence 1 (10) | Sequence 2 (10) | Sequence 3 (10) | Sequence 4 (10) | Sequence 5 (10) |
|---|---|---|---|---|---|---|
| SMSL | GLSNR | 2.57 | Inf | Inf | 2.11 | 5.5 |
| GSCR | 12.20 | Inf | Inf | 24.35 | 13.24 | |
| BSF | 35.42 | Inf | Inf | 44.23 | 105.78 | |
| IPI | GLSNR | 290.52 | 70.24 | 220.17 | 208.25 | 2.68 |
| GSCR | 6224.76 | 362.61 | 543.22 | 453.41 | 23.24 | |
| BSF | 23,945.68 | 549.59 | 16,849.16 | 10,621.32 | 2268.41 | |
| ReWIPI | GLSNR | Inf | Inf | Inf | Inf | Inf |
| GSCR | Inf | Inf | Inf | Inf | Inf | |
| BSF | Inf | Inf | Inf | Inf | Inf | |
| NIPPS | GLSNR | 13.12 | 5.48 | 2.62 | 39.23 | 6.97 |
| GSCR | 187.23 | 70.65 | 53.51 | 543.78 | 11.69 | |
| BSF | 233.74 | 118.36 | 87.37 | 1077.72 | 148.41 | |
| RIPT | GLSNR | Inf | Inf | Inf | Inf | Inf |
| GSCR | Inf | Inf | Inf | Inf | Inf | |
| BSF | Inf | Inf | Inf | Inf | Inf | |
| RS1/2NIPI | GLSNR | Inf | Inf | Inf | Inf | Inf |
| GSCR | Inf | Inf | Inf | Inf | Inf | |
| BSF | Inf | Inf | Inf | Inf | Inf |
| Methods | Acronyms | Parameter Settings |
|---|---|---|
| TopHat method [14] | TopHat | structure shape: square, size |
| MaxMedian filter [9] | MaxMedian | support size: N = 1, 3, ..., 9 L = 4, m = 2, n = 2 , g = 0.6 |
| Multiscale Patch-based Contrast Measure [22] | MPCM | |
| Weighted Local Difference Measure [21] | WLDM | |
| Local Saliency Map [20] | LSM |
| Methods | Indicators | Sequence 1 (10) | Sequence 2 (10) | Sequence 3 (10) | Sequence 4 (10) | Sequence 5 (10) |
|---|---|---|---|---|---|---|
| TopHat | GLSNR | 1.90 | 2.03 | 1.55 | 2.27 | 1.22 |
| GSCR | 10.85 | 7.76 | 4.84 | 6.93 | 6.40 | |
| BSF | 11.16 | 9.00 | 5.85 | 12.89 | 15.12 | |
| MaxMedian | GLSNR | 2.95 | 2.59 | 1.78 | 3.55 | 0.25 |
| GSCR | 8.57 | 6.29 | 4.77 | 9.17 | 4.50 | |
| BSF | 9.21 | 7.24 | 7.32 | 20.14 | 9.73 | |
| MPCM | GLSNR | 7.20 | 10.31 | 5.53 | 8.06 | 1.19 |
| GSCR | 25.23 | 38.36 | 22.36 | 30.73 | 13.61 | |
| BSF | 2403.02 | 4011.92 | 1370.52 | 3968.32 | 539.97 | |
| WLDM | GLSNR | 7.98 | 5.11 | 3.69 | 2.18 | 0.44 |
| GSCR | 23.42 | 6.78 | 4.13 | 7.36 | 2.83 | |
| BSF | 88.15 | 11.32 | 12.99 | 13.08 | 4.13 | |
| LSM | GLSNR | 6.90 | 9.12 | 7.83 | 6.95 | 0.91 |
| GSCR | 30.09 | 32.30 | 22.27 | 23.38 | 4.61 | |
| BSF | 1093.71 | 2840.80 | 877.47 | 678.73 | 213.94 | |
| RS1/2NIPI | GLSNR | Inf | Inf | Inf | Inf | Inf |
| GSCR | Inf | Inf | Inf | Inf | Inf | |
| BSF | Inf | Inf | Inf | Inf | Inf |
| Methods | TopHat | MaxMedian | WLDM | MPCM | LSM | SMSL | IPI | ReWIPI | NIPPS | RIPT | RS1/2NIPI |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Sequence1 | 0.015 | 2.58 | 3.47 | 0.062 | 0.012 | 2.08 | 43.9 | 72.37 | 12.20 | 7.54 | 12.64 |
| Sequence 2 | 0.016 | 2.63 | 3.50 | 0.070 | 0.072 | 1.95 | 38.3 | 72.3 | 12.31 | 6.12 | 12.83 |
| Sequence 3 | 0.028 | 2.72 | 3.52 | 0.096 | 0.011 | 1.80 | 39.9 | 71.45 | 12.26 | 7.67 | 13.24 |
| Sequence 4 | 0.036 | 2.68 | 3.61 | 0.12 | 0.013 | 2.03 | 43.4 | 72.40 | 12.40 | 7.57 | 13.08 |
| Sequence 5 | 0.13 | 1.64 | 2.31 | 0.086 | 0.073 | 1.87 | 16.0 | 24.24 | 14.53 | 5.81 | 7.17 |
| Sequence 6 | 11.91 | 10.92 | 16.62 | 1.18 | 0.73 | 20.4 | 1133 | 217.42 | 1404 | 54.3 | 78.79 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, F.; Wu, Y.; Dai, Y.; Wang, P. Detection of Small Target Using Schatten 1/2 Quasi-Norm Regularization with Reweighted Sparse Enhancement in Complex Infrared Scenes. Remote Sens. 2019, 11, 2058. https://doi.org/10.3390/rs11172058
Zhou F, Wu Y, Dai Y, Wang P. Detection of Small Target Using Schatten 1/2 Quasi-Norm Regularization with Reweighted Sparse Enhancement in Complex Infrared Scenes. Remote Sensing. 2019; 11(17):2058. https://doi.org/10.3390/rs11172058
Chicago/Turabian StyleZhou, Fei, Yiquan Wu, Yimian Dai, and Peng Wang. 2019. "Detection of Small Target Using Schatten 1/2 Quasi-Norm Regularization with Reweighted Sparse Enhancement in Complex Infrared Scenes" Remote Sensing 11, no. 17: 2058. https://doi.org/10.3390/rs11172058
APA StyleZhou, F., Wu, Y., Dai, Y., & Wang, P. (2019). Detection of Small Target Using Schatten 1/2 Quasi-Norm Regularization with Reweighted Sparse Enhancement in Complex Infrared Scenes. Remote Sensing, 11(17), 2058. https://doi.org/10.3390/rs11172058