End-to-End Simulation of WCOM IMI Sea Surface Salinity Retrieval


Abstract
:1. Introduction
2. Concepts and Methods
2.1. Interferometric Microwave Imager (IMI)
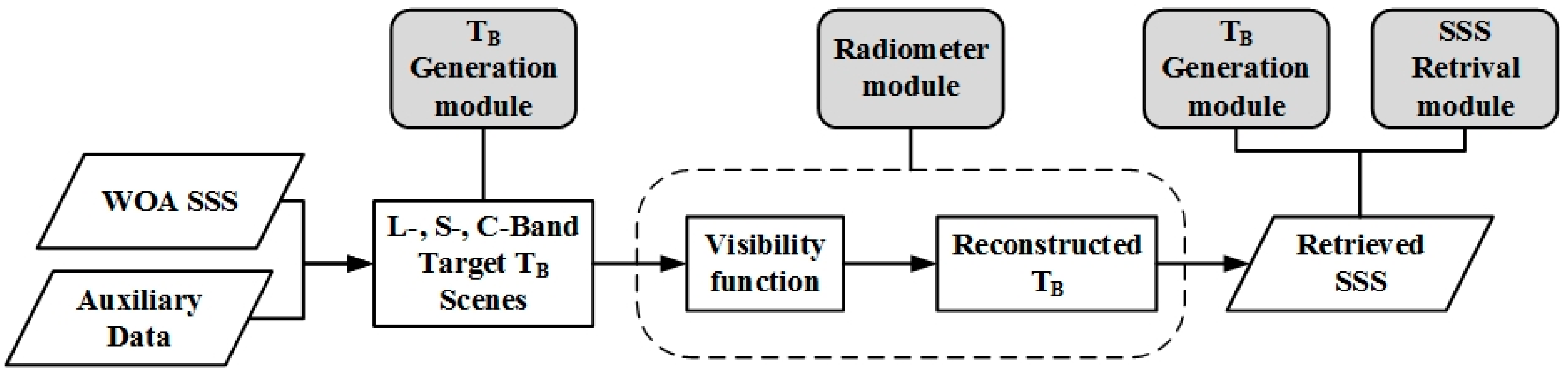
2.2. End-to-End Simulation Model and Method
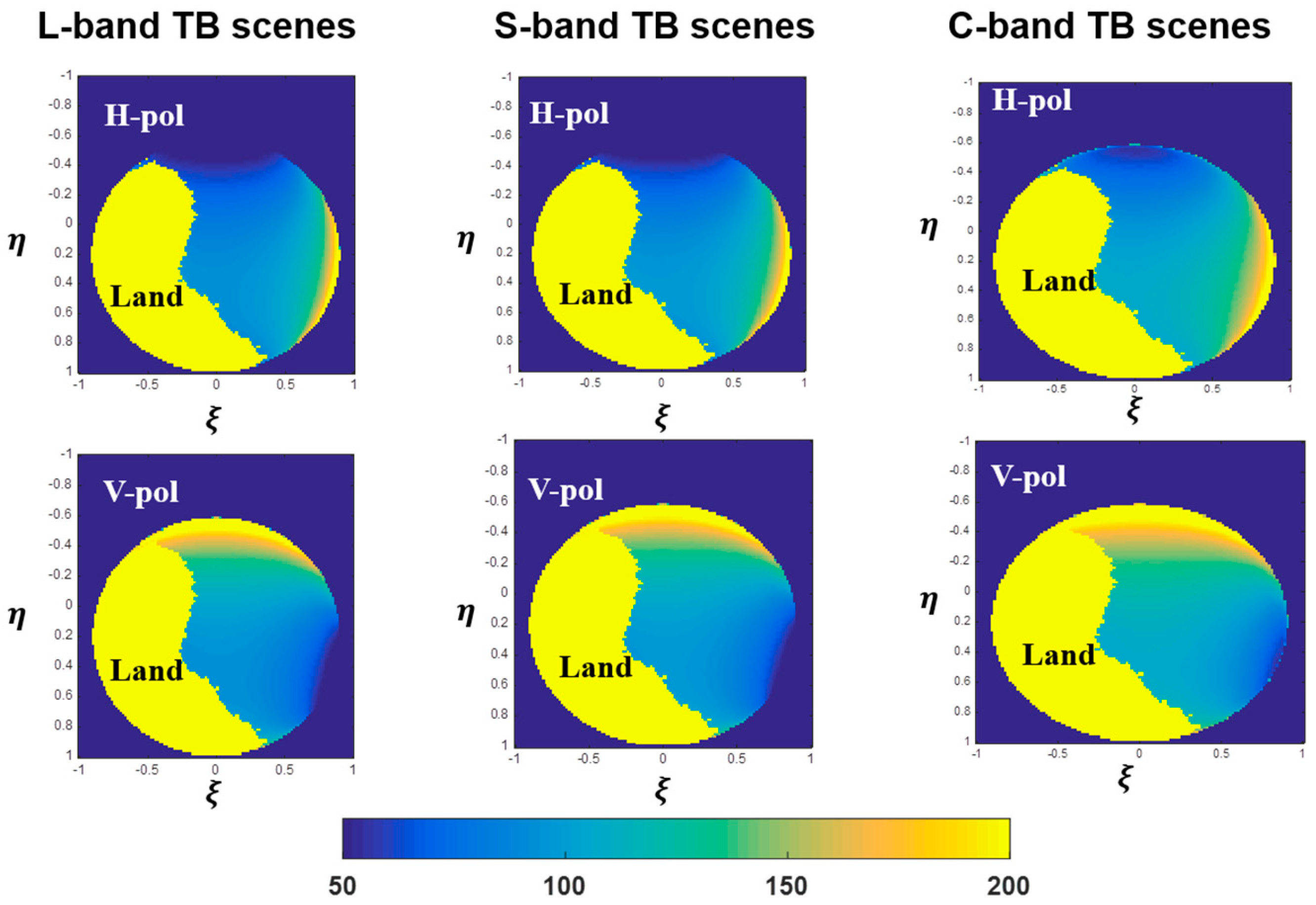
2.2.1. TB Generation Module
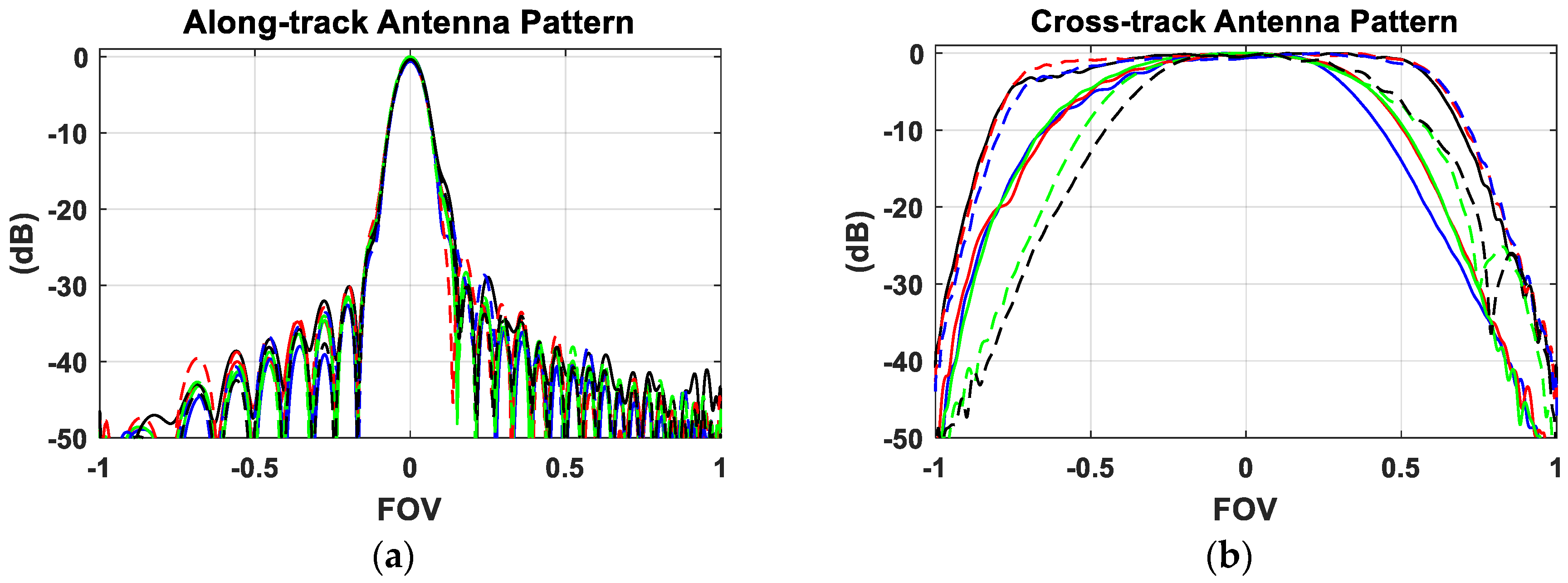
2.2.2. Radiometer Module
2.2.3. SSS Retrieval Module
2.3. Simulation Input
3. Results and Discussion
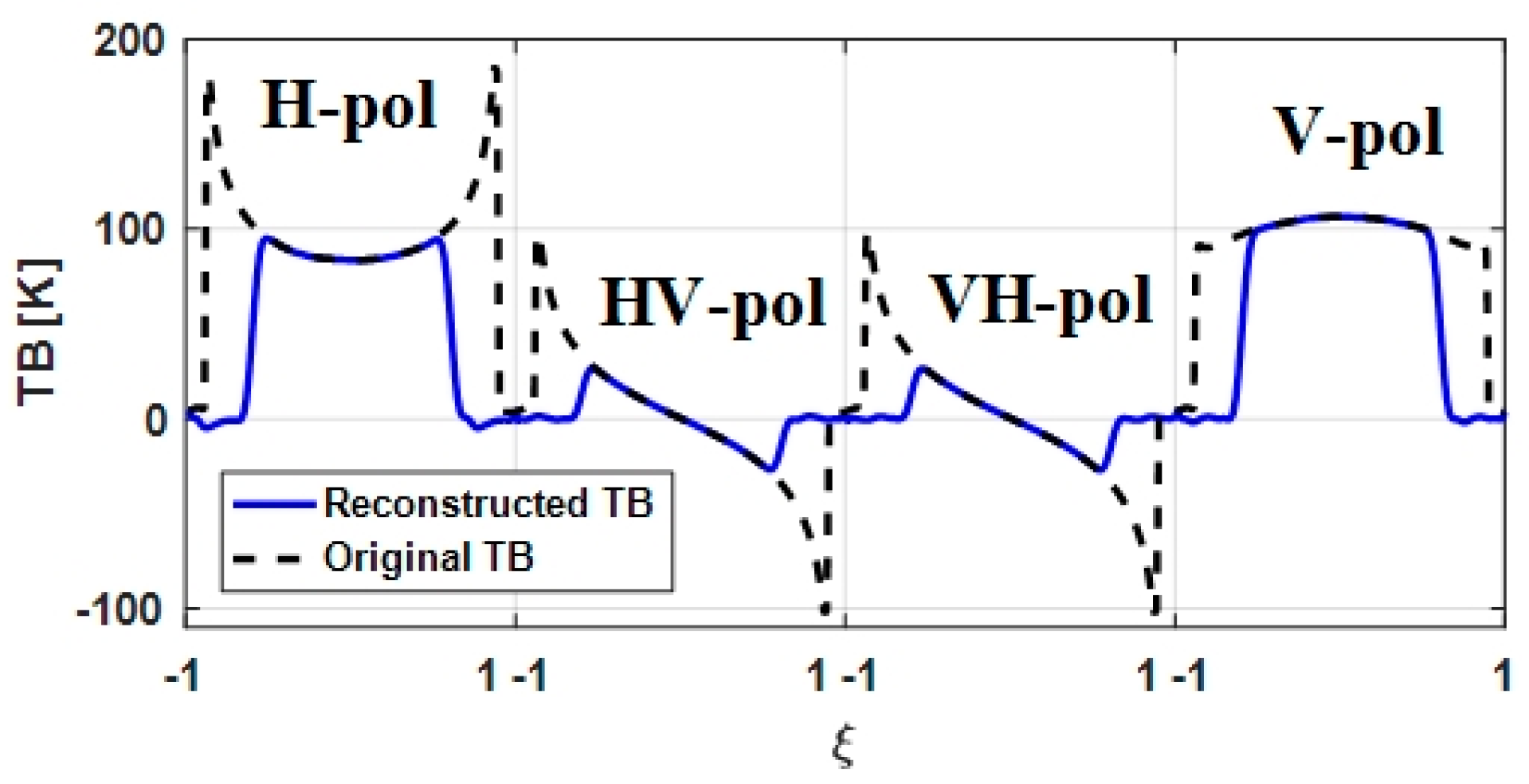
3.1. TB Reconstruction Results
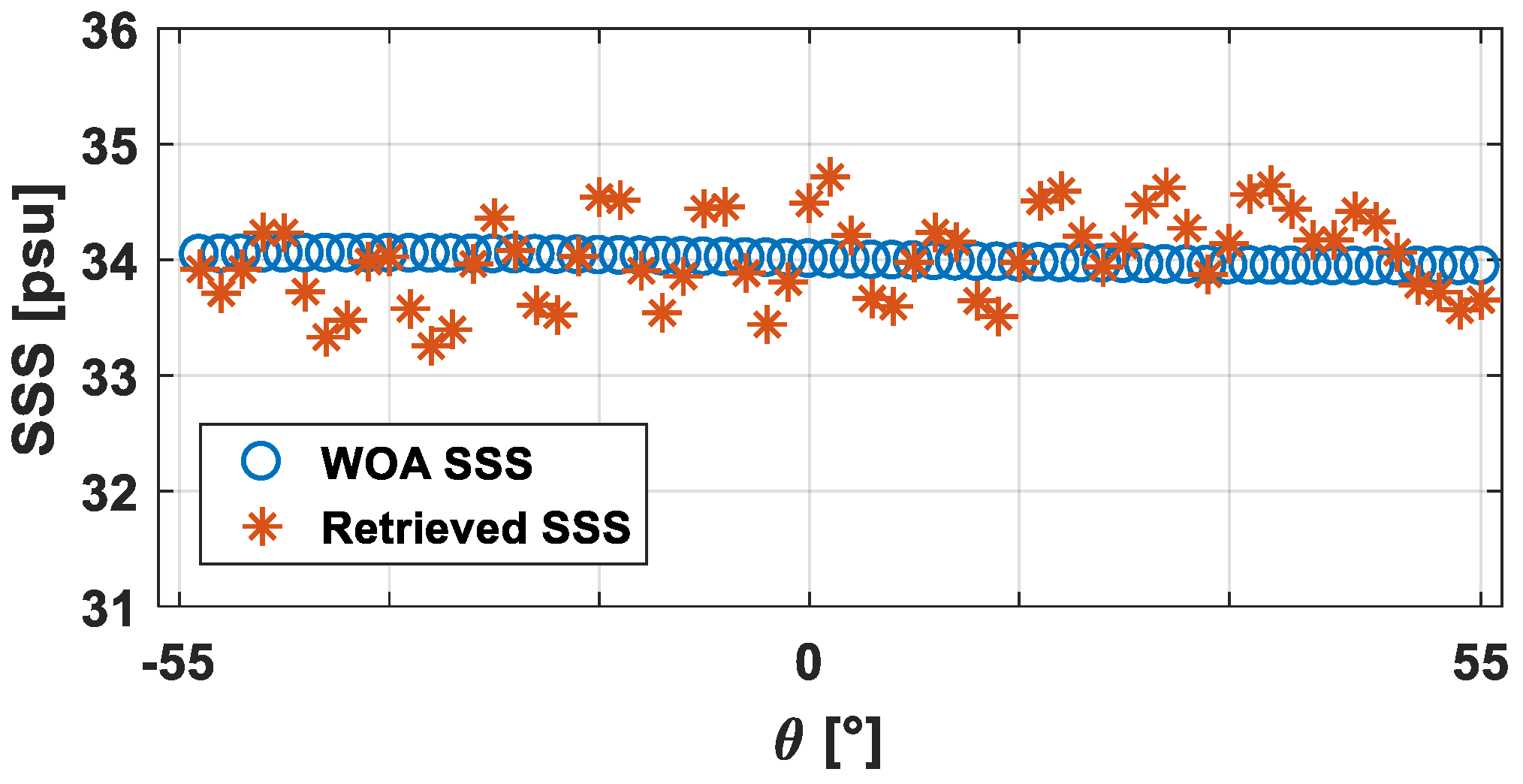
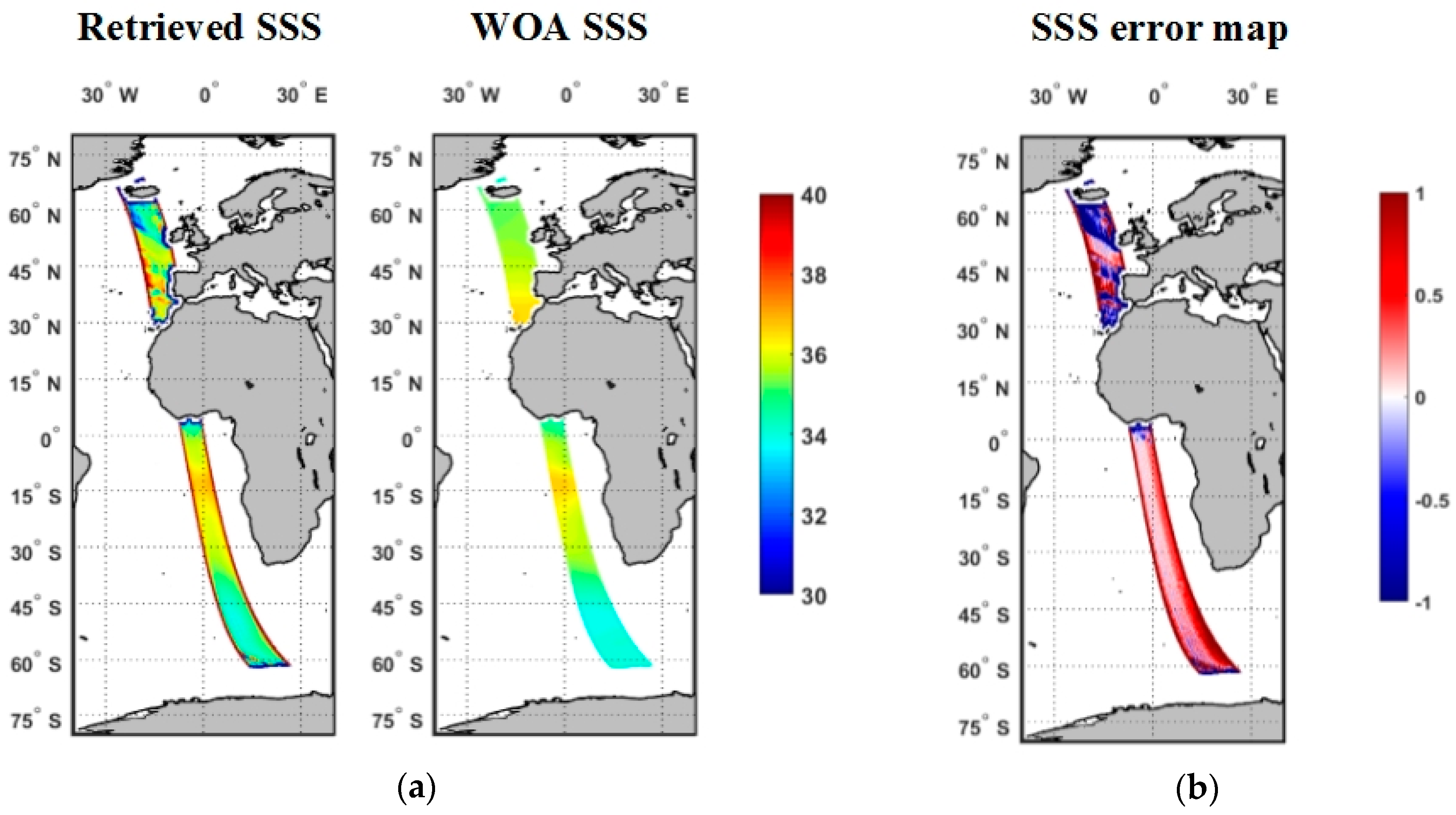
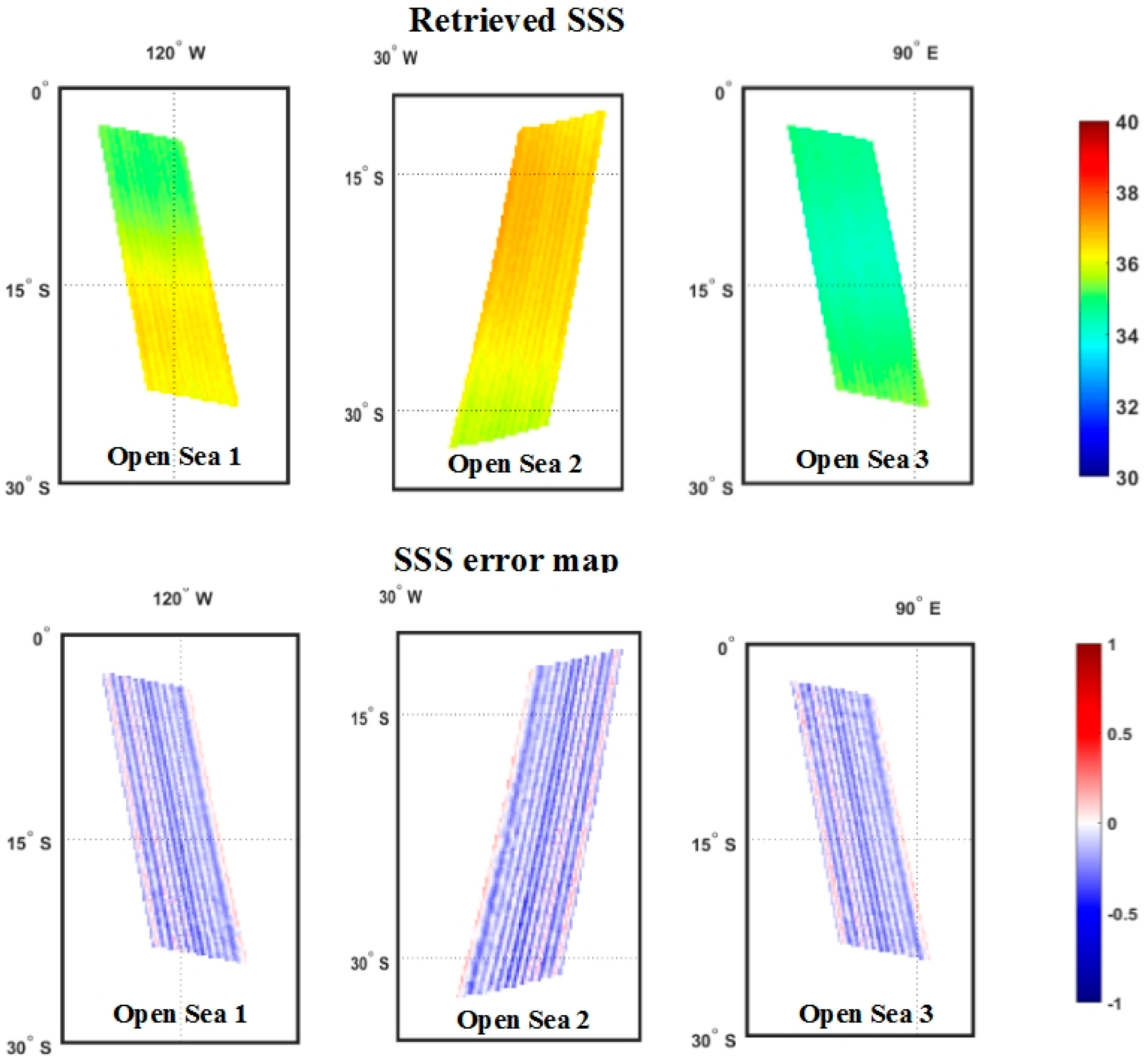
3.2. SSS Retrieval Results
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Shi, J.; Zhao, T.; Du, J.; Ji, D.; Xiong, C.; Dong, X.; Liu, H.; Wang, Z.; Jiang, L.; Du, Y. Observing Earth’s water cycle from space. In Proceedings of the SPIE International Asia-Pacific Environmental Remote Sensing Symposium, Beijing, China, 13–17 October 2014. [Google Scholar]
- Liu, H.; Niu, L.; Wu, L.; Zhang, C.; Zhang, X.; Yin, X.; Wu, J. IMI (Interferometric Microwave Imager): AL/S/C tri-frequency radiometer for Water Cycle Observation Mission (WCOM). In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016. [Google Scholar]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.P.; Martinuzzi, J.A.M.J.; Font, J.; Berger, M. Soil moisture retrieval from space: The Soil Moisture and Ocean Salinity (SMOS) mission. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1729–1735. [Google Scholar] [CrossRef]
- Lagerloef, G.; Colomb, F.R.; Le Vine, D.; Wentz, F.; Yueh, S.; Ruf, C.; Lilly, J.; Gunn, J.; Chao, Y.; Feldman, G.; et al. The Aquarius/SAC-D mission: Designed to meet the salinity remote-sensing challenge. Oceanography 2008, 21, 68–81. [Google Scholar] [CrossRef]
- Entekhabi, D.; Njoku, E.; O’Neill, P.; Spencer, M.; Jackson, T.; Entin, J.; Im, E.; Kellogg, K. The soil moisture active/passive mission (SMAP). In Proceedings of the IGARSS 2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008; Volume 3. [Google Scholar]
- Yueh, S.H.; West, R.; Wilson, W.J.; Li, F.K.; Njoku, E.G.; Rahmat-Samii, Y. Error sources and feasibility for microwave remote sensing of ocean surface salinity. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1049–1060. [Google Scholar] [CrossRef]
- Jin, M.; Liu, H.; Wu, L.; Wu, L.; Wang, R.; Zhang, C.; Yin, X.; Zhao, T.; Sun, W.; Cui, H.; et al. Task Simulation and External Error Sources Analysis for an Ocean Salinity Mission with One-dimensional Synthetic Aperture Microwave Radiometer. Remote Sens. Technol. Appl. 2017, 32, 346–355. [Google Scholar]
- Zine, S.; Boutin, J.; Font, J.; Reul, N.; Waldteufel, P.; Gabarró, C.; Tenerelli, J.; Vergely, J.-L.; Talone, M.; Delwart, S.; et al. Overview of the SMOS Sea Surface Salinity Prototype Processor. IEEE Trans. Geosci. Remote Sens. 2008, 46, 621–645. [Google Scholar] [CrossRef] [Green Version]
- Klein, L.; Swift, C.T. An improved model for the dielectric constant of sea water at microwave frequencies. IEEE Trans. Antennas Propag. 1977, 25, 104–111. [Google Scholar] [CrossRef]
- Meissner, T.; Wentz, F.J. The emissivity of the ocean surface between 6 and 90 GHz over a large range of wind speeds and Earth incidence angles. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3004–3026. [Google Scholar] [CrossRef]
- Wentz, F.J. A two-scale scattering model for foam-free sea microwave brightness temperatures. J. Geophys. Res. 1975, 80, 3441–3446. [Google Scholar] [CrossRef]
- Wentz, F.J.; Meissner, T. AMSR Ocean Algorithm, Algorithm Theoretical Basis Document; Remote Sensing System: Santa, Rosa, CA, USA, 2000. [Google Scholar]
- Corbella, I.; Duffo, N.; Vall-llossera, M.; Camps, A.; Torres, F. The visibility function in interferometric aperture synthesis radiometry. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1677–1682. [Google Scholar] [CrossRef] [Green Version]
- Vall-Llossera Ferran, M.M.; Corbella Sanahuja, I.; Torres Torres, F.; Camps Carmona, A.J.; Colliander, A.; Martín Neira, M.; Ribó Vedrilla, S.; Rautiainen, K.; Duffo Ubeda, N. MIRAS end-to-end calibration: Application to SMOS L1 processor. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1126–1134. [Google Scholar]
- Corbella, I.; Torres, F.; Camps, A.; Duffo, N.; Vall-llossera, M. Brightness-Temperature Retrieval Methods in Synthetic Aperture Radiometers. IEEE Trans. Geosci. Remote Sens. 2009, 47, 285–294. [Google Scholar] [CrossRef] [Green Version]
- Tanner, A.B.; Swift, C.T. Calibration of a synthetic aperture radiometer. IEEE Trans. Geosci. Remote Sens. 1993, 31, 257–267. [Google Scholar] [CrossRef]
- AMSR2/AMSR—Remote Sensing Systems. Available online: http://www.remss.com/missions/amsr/ (accessed on 1 September 2018).
- World Ocean Atlas 2013 Version 2. Available online: https://www.nodc.noaa.gov/OC5/woa13/ (accessed on 1 September 2018).
- Zhang, A.; Liu, H.; Wu, L.; Wu, J.; Niu, L.; Guo, X. Spatial Bias Analysis and Calibration for the L- band 1-D Synthetic Aperture Radiometer. J. Remote Sens. under review.
- Li, Y.; Li, Q.; Lu, H. Land Contamination Analysis of SMOS Brightness Temperature Error Near Coastal Areas. IEEE Geosci. Remote Sens. Lett. 2017, 14, 587–591. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| L-band | S-band | C-band | |
|---|---|---|---|
| Frequency (GHz) | 1.4135 | 2.695 | 6.9 |
| Bandwidth (MHz) | 25 | 8 | 200 |
| Along-track Resolution (km) | 35 | 20 | 10 |
| Cross-track Resolution (km) | 35–75 | 20–45 | 15–30 |
| Radiometric Resolution (K) | 0.2 | 1.5 | 0.6 |
| Field of View (km) | 1000 | 1000 | 1000 |
| Open Sea | 1 | 2 | 3 |
|---|---|---|---|
| Area Location | South Pacific Ocean | South Atlantic Ocean | Indian Ocean |
| RMSE (psu) | 0.1680 | 0.1779 | 0.1655 |
| std (psu) | 0.1209 | 0.1296 | 0.1209 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Liu, H.; Zhang, A. End-to-End Simulation of WCOM IMI Sea Surface Salinity Retrieval. Remote Sens. 2019, 11, 217. https://doi.org/10.3390/rs11030217
Li Y, Liu H, Zhang A. End-to-End Simulation of WCOM IMI Sea Surface Salinity Retrieval. Remote Sensing. 2019; 11(3):217. https://doi.org/10.3390/rs11030217
Chicago/Turabian StyleLi, Yan, Hao Liu, and Aili Zhang. 2019. "End-to-End Simulation of WCOM IMI Sea Surface Salinity Retrieval" Remote Sensing 11, no. 3: 217. https://doi.org/10.3390/rs11030217
APA StyleLi, Y., Liu, H., & Zhang, A. (2019). End-to-End Simulation of WCOM IMI Sea Surface Salinity Retrieval. Remote Sensing, 11(3), 217. https://doi.org/10.3390/rs11030217