In this section, we will review the original TSPA method under the dual-baseline (DB) case. For the MB case, the readers can refer to [
1]. If the size of the interferograms obtained by the DB InSAR system is
and the pixel of the
ith row and
jth column in the interferograms is referred as pixel
. The InSAR measurement of a pixel can be given by
where
,
and integer
are the wrapped phase, absolute phase, and ambiguity number of the pixel
in interferogram
, respectively.
can be measured by the DB InSAR system, but
and
are the unknowns that need to be solved. If the ambiguity number
of each pixel can be solved,
that contains the terrain information can be obtained through Equation (
1). The absolute phases of the two interferograms can be combined by using the baseline lengths such as [
1]
where
and
represent two different normal baseline (or perpendicular baseline) lengths [
8,
11]. In the rest of this paper, normal baseline length is shortened as baseline length. According to Equation (
2), the TSPA method establishes the relationship of gradient information in different interferograms with different baselines as shown in Equations (
3) and (
4)
where
,
,
,
,
. The superscript
x and
y represent the adjacent relationship on horizontal and vertical directions of adjacent pixels, respectively.
and
are the wrapped phase differences between adjacent pixels of interferogram
r.
and
are the ambiguity number gradient between adjacent pixels of interferogram
r. According to CRT, we can obtain the solution to Equations (
3) and (
4) under some special combination of the baseline lengths (because
and
are integer) [
1]. Equations (
3) and (
4) can be solved by the optimization model shown in (
5) and (
6)
where
and
are the decision variables, and the objective functions (i.e.,
and
) of Equations (
5) and (
6) are defined in Equations (
7) and (
8)
It can be seen that
and
are the CRT biases, so Equations (
5) and (
6) are to find the ambiguity number gradient (i.e.,
and
) with minimum CRT biases [
1]. Based on the gradient information obtained by Equations (
5)–(
8), TSPA uses the framework of the
-norm SB PU to respectively obtain the final PU result of each interferogram by Equation (
9),
where
and
are the weights that can usually be obtained by using any kind of quality maps of the input interferograms [
1], and
is the decision variable.
As described in
Section 1, many important SB PU concepts can be transplanted into MB domain through using the framework of TSPA [
1]. For example, under the framework of TSPA, we can define the MB residue, i.e., the loop integration value of the gradients obtained by Equations (
5) and (
6) of any
neighboring pixels. Because the MB PU does not follow the SB PU using the Itoh condition to estimate the gradient information, the MB residue polarity is
,
Integer, but that in SB is ±1 [
20]. It can be seen that the TSPA method consists of two stages. In stage 1, the ambiguity number gradient is estimated according to the CRT formulation. In stage 2, the final PU result of each interferogram is obtained by the framework of the SB
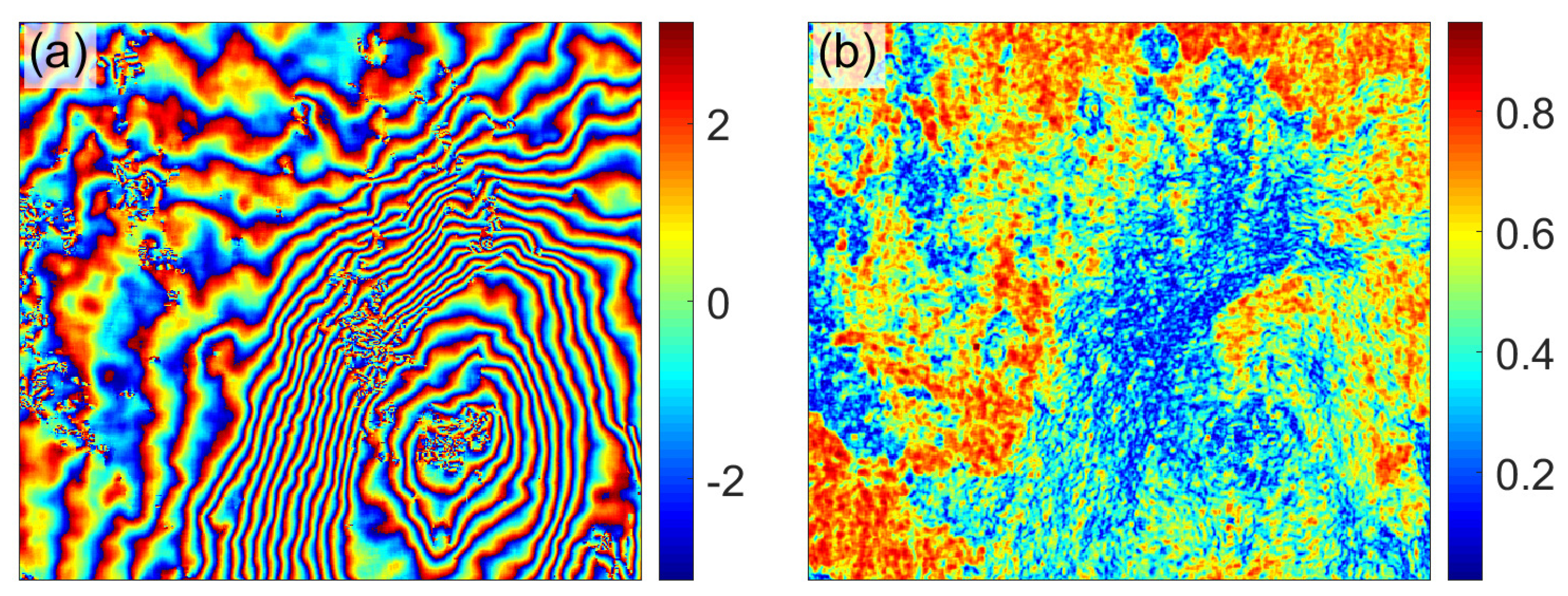
-norm PU method. However, as described, CRT is too sensitive to measurement bias that is potentially caused by atmospheric artifact, surface deformation, or system noise, so the gradient information obtained in stage 1 will be very noisy. For example,
Figure 2a,b are two realistic interferograms with different baseline lengths (6.40 m and 40.29 m respectively). Other system interferometric parameters of
Figure 2a,b are the same to those of the TerraSAR-X MB InSAR dataset employed in Experiment 2.
Figure 2c,d are the SB residue distributions of
Figure 2a,b.
Figure 2e,f are the MB residue distributions of
Figure 2a,b obtained by the TSPA method. The statistical information of
Figure 2c–f is shown in
Table 1.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}