An Accurate TLS and UAV Image Point Clouds Registration Method for Deformation Detection of Chaotic Hillside Areas



Abstract
:1. Introduction
1.1. Registration Techniques of Point Clouds
1.2. Deformation Detection Methods
- (1)
- We propose an efficient pairwise registration algorithm based on patch primitives to register adjacent point clouds of hillside areas coarsely. The main feature of the method is that the information of the trend and topographic undulation of the mountains together with multi-scale information of each patch are applied to determine the correspondences robustly.
- (2)
- We propose a novel multi-station adjustment algorithm to accurately register TLS and UAV dense image points, which corrects the cumulative errors based on locally closed loops formed by adjacent stations. The introduction of virtual points makes the linearization of the condition equation group possible, reaching the global optimal alignment of all TLS stations.
- (3)
- Based on the registration techniques, we generate DEMs, slope and aspect maps, and vertical sections of multi-temporal TLS surveys for deformation detection and terrain morphological analysis, thus demonstrating the effectiveness of the high resolution deformation detection method with limited GCPs.
2. Materials and Methods
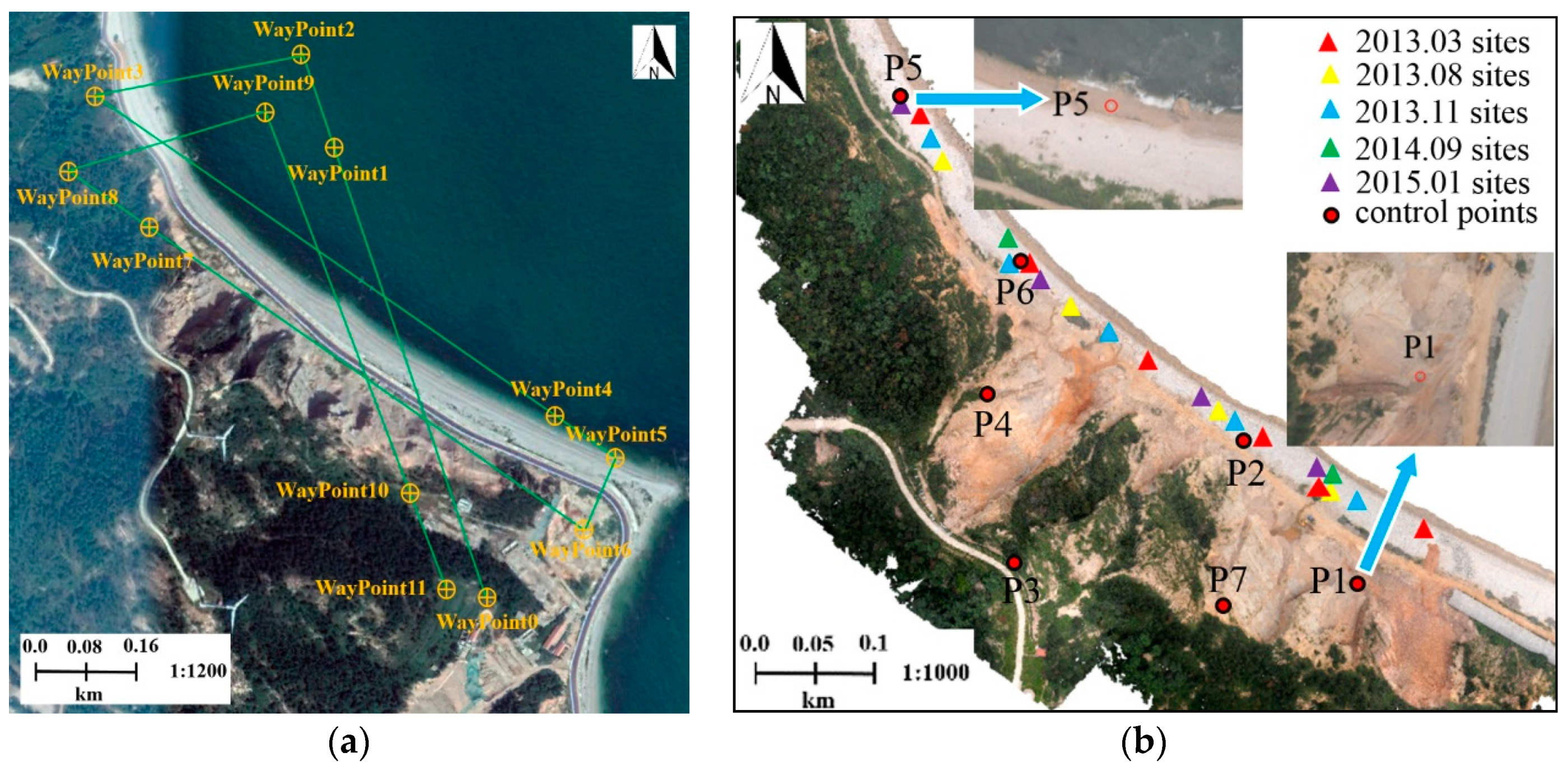
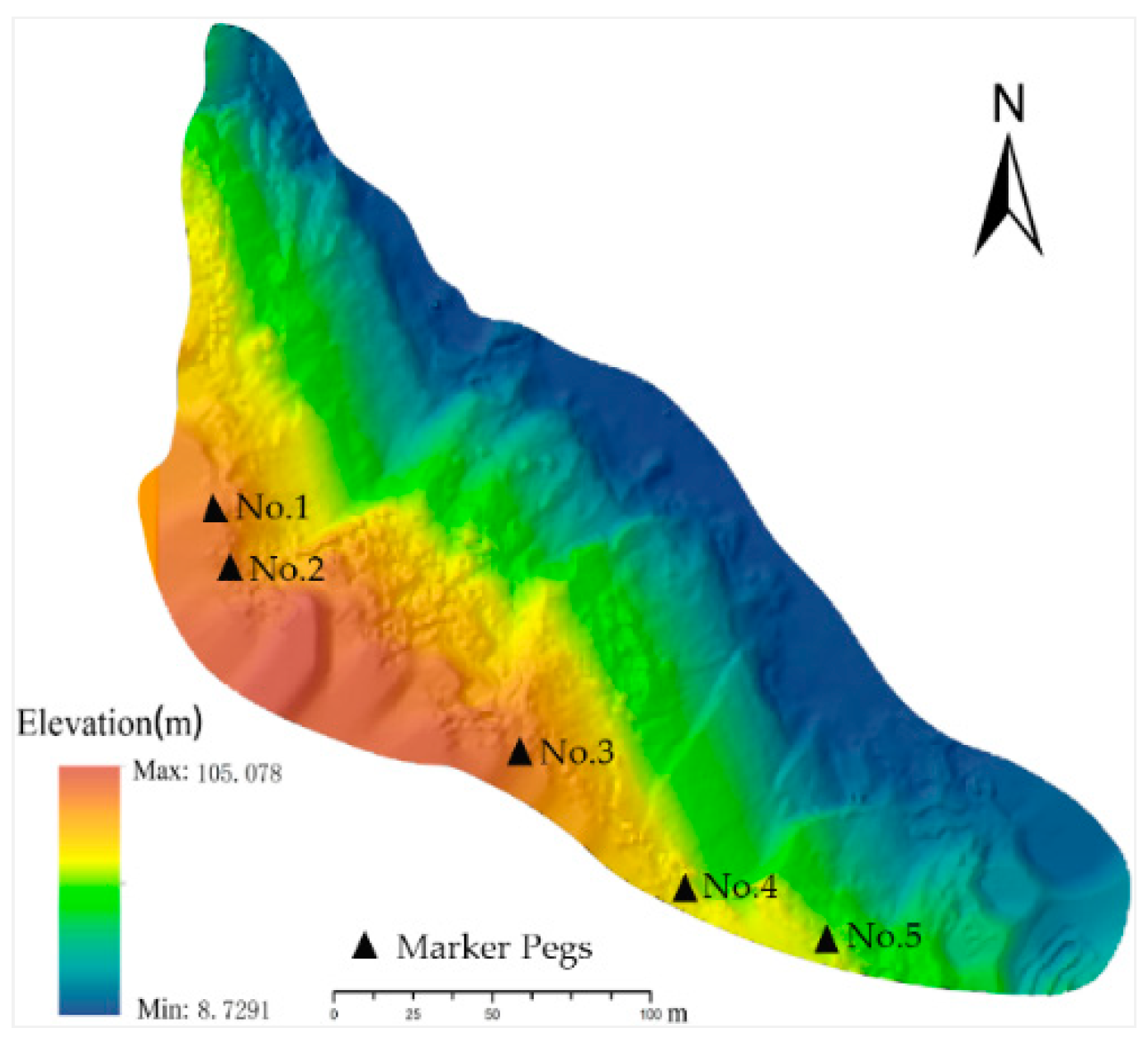
2.1. Experimental Area
2.2. Data Acquisition: UAV Flying and Terrestrial Laser Scanning
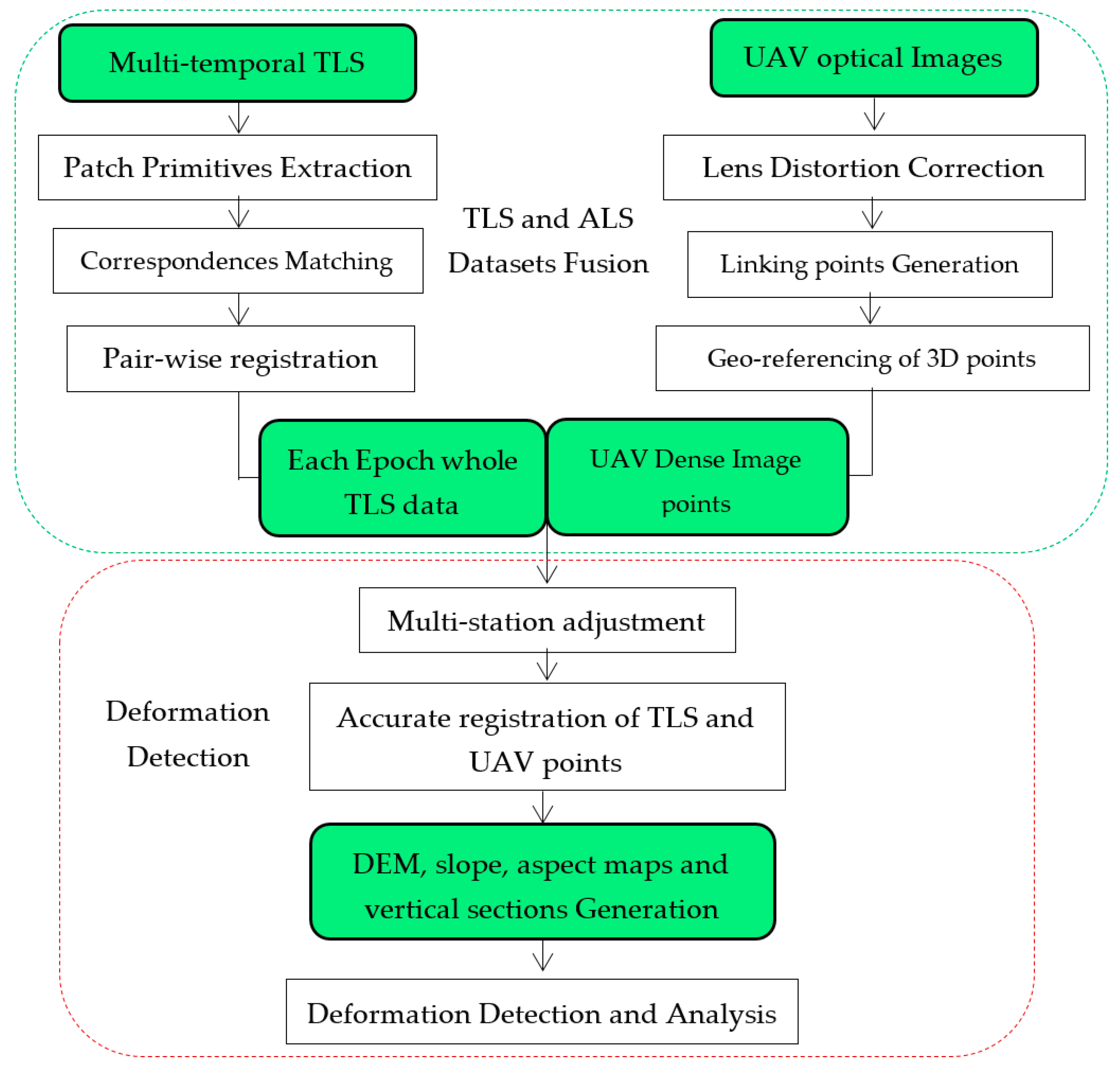
2.3. Method Workflow
2.4. Pairwise Registration between TLS Stations
2.4.1. Patch Primitive Extraction and Multi-Scale Descriptor Construction
2.4.2. Matching Strategy and Transformation
- Step 1:
- Select three non-colinear patches from the left and right station, respectively. For each station, calculate the mixed product of the normal vectors of patches, and calculate three distances between them.
- Step 2:
- Judge whether the angles between the patches of the left station are identical with that of the right station by comparing their mixed products. If not, repeat Step 1.
- Step 3:
- Compare the multi-scale information of each patch feature point from two stations for equality. For each scale, the difference threshold is determined by the mean square error of all points within the patch. If three pairs of similar points cannot be obtained, repeat Step 1.
- Step 4:
- Compare the corresponding distances of two stations for equality. If three correspondences are obtained, repeat the above steps until enough matched points are obtained.
| Algorithm Matching of triple patches |
| 1. lPts and rPts are feature point array of triple patches selected randomly |
| 2. lMixedP = (lPts[0].normal, lPts[1].normal, lPts[2].normal); |
| 3. rMixedP = (rPts[0].normal, rPts[1].normal, rPts[2].normal); |
| 4. //lPts[i].normal, rPts[j].normal are the normal vectors of corresponding patch, i∈[0,3], j∈[0,3] |
| 5. // lMixedP and rMixedP are the mixed products of normal vectors of triple patches. |
| 6. if | lMixedP- rMixedP | > Threshold then |
| 7. return |
| 8. end if |
| 9. //Match patches by the multi-scale informaiton of feature points |
| 10. for i from 0 to lPts.size()-1 |
| 11. for j from 0 to rPts.size()-1 |
| 12. if isimilar(lPts[i].multiscales, rPts[j].multiscales ) = = true then |
| 13. onePair.left = i; onePair.right = j; PairArray.push_back(onePair); |
| 14. break |
| 15. end if |
| 16. end for |
| 17. end for |
| 18. if PairArray.size() != 3 then |
| 19. return |
| 20. end if |
| 21. //Match patches by the distances between feature points |
| 22. flag = 0 |
| 23. for i from 0 to 2 |
| 24. for j from i+1 to 2 |
| 25. if distance(lPts[PairArray[i].left], lPts[PairArray[j].left]) = = |
| 26. distance(rPts[PairArray[i].right], rPts[PairArray[j].right]) |
| 27. then flag++ |
| 28. end if |
| 29. end for |
| 30. end for |
| 31. if flag != 3 then |
| 32. PairArray.erase(); //PairArray is the array of corresponding points |
| 33. end if |
2.5. Dense Image Points Generation from UAV Optical Images
2.6. Multi-Station Adjustment Based on a Locally Closed Loop
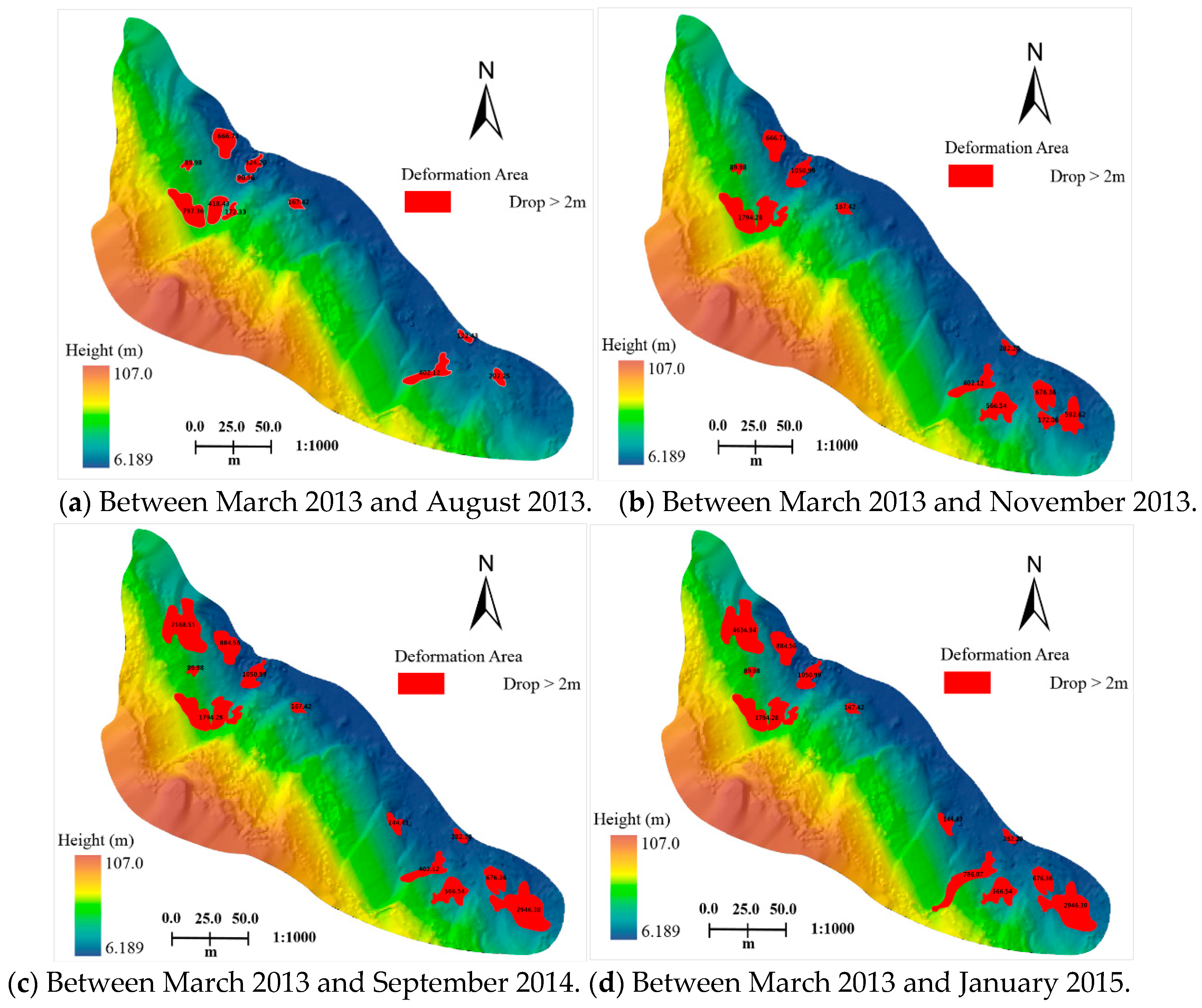
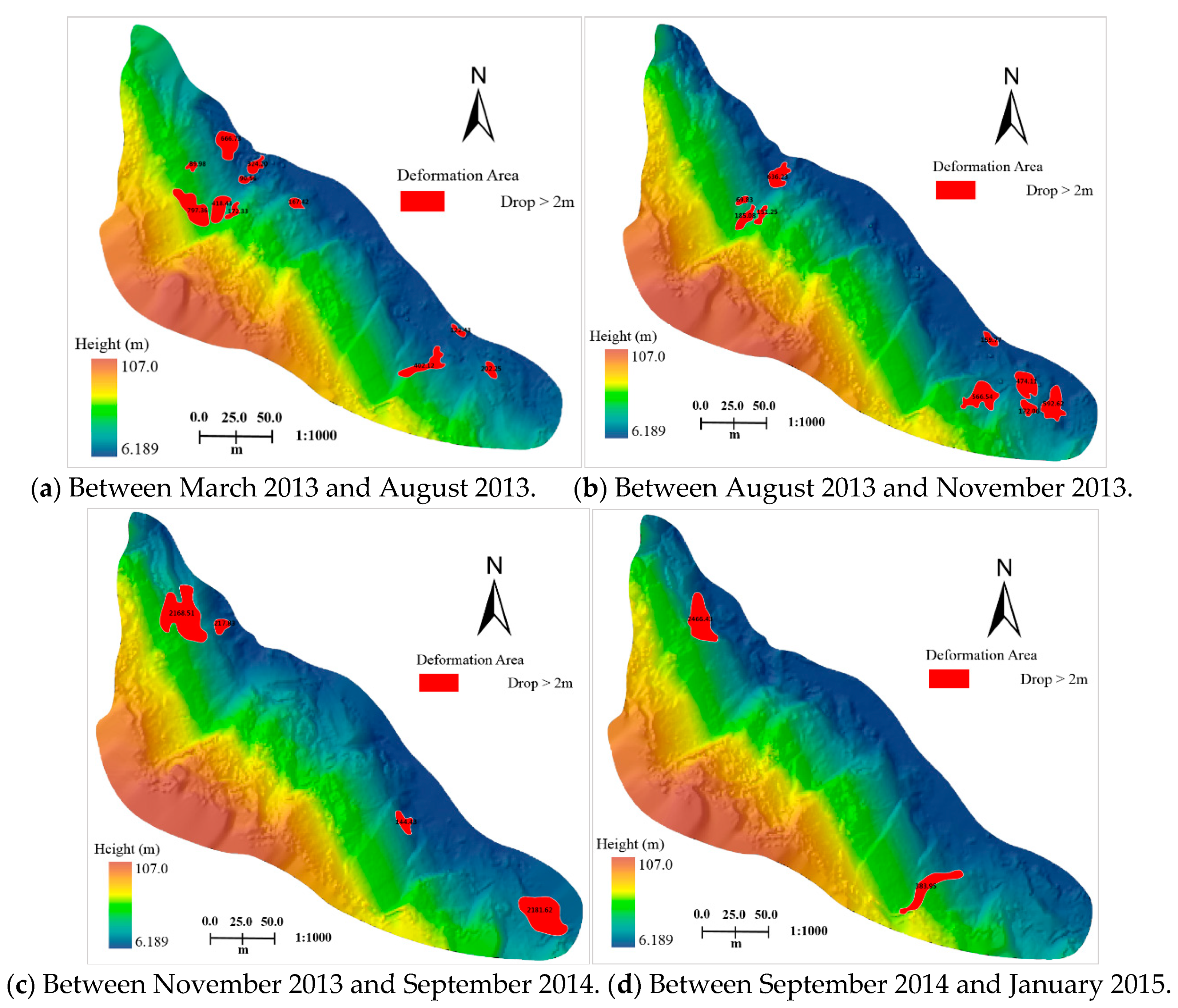
2.7. DEM Generation and Deformation Comparison between Observations
3. Results
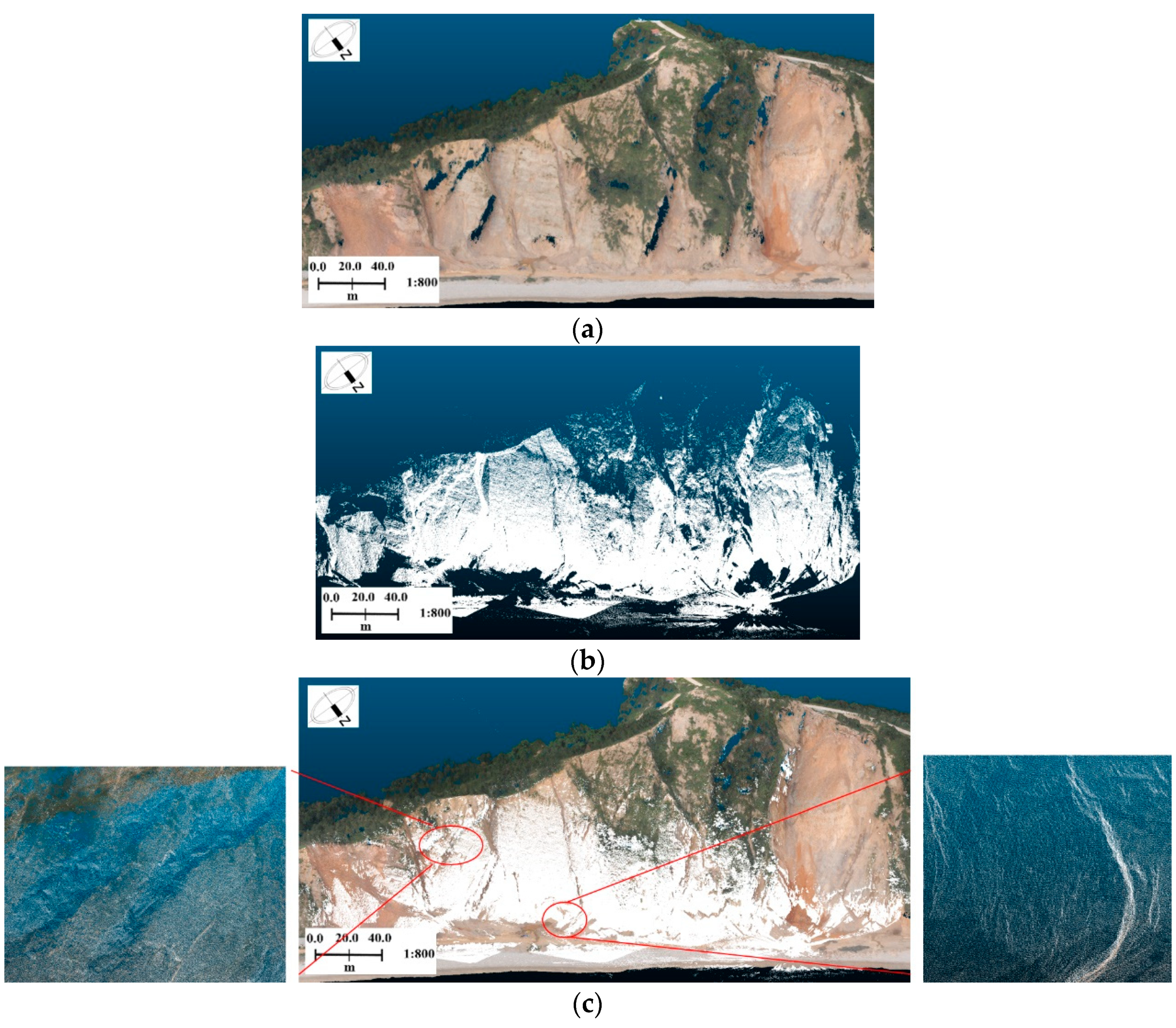
3.1. Registration Experiments
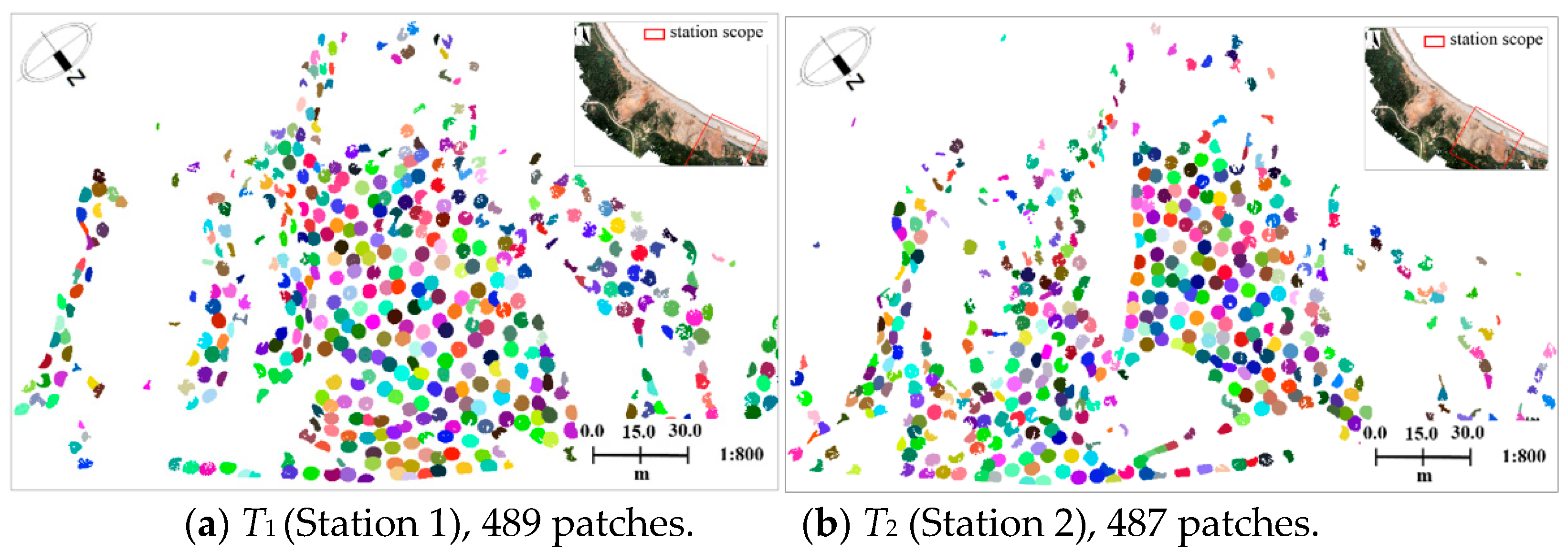
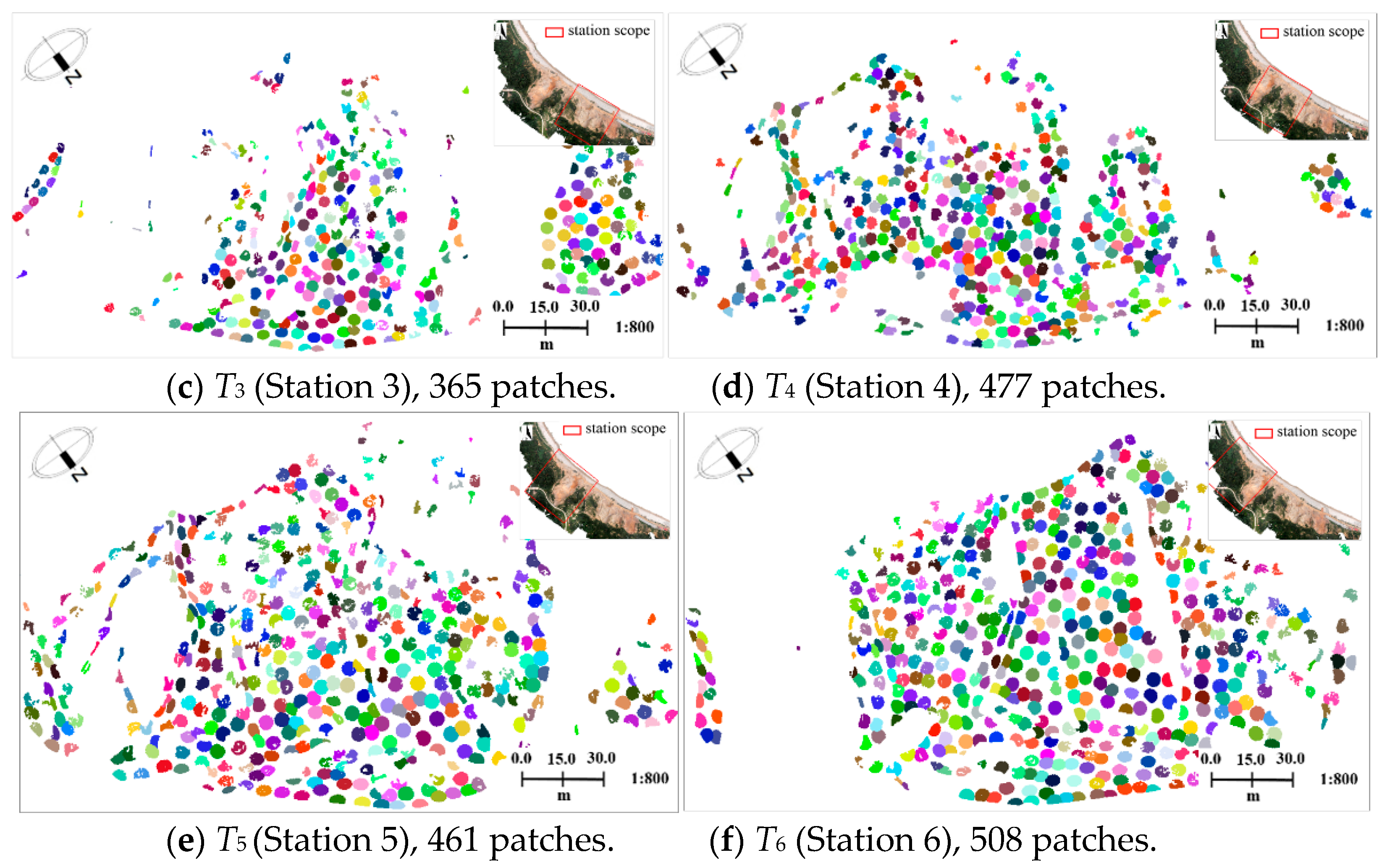
3.1.1. Extraction of Patch Primitives
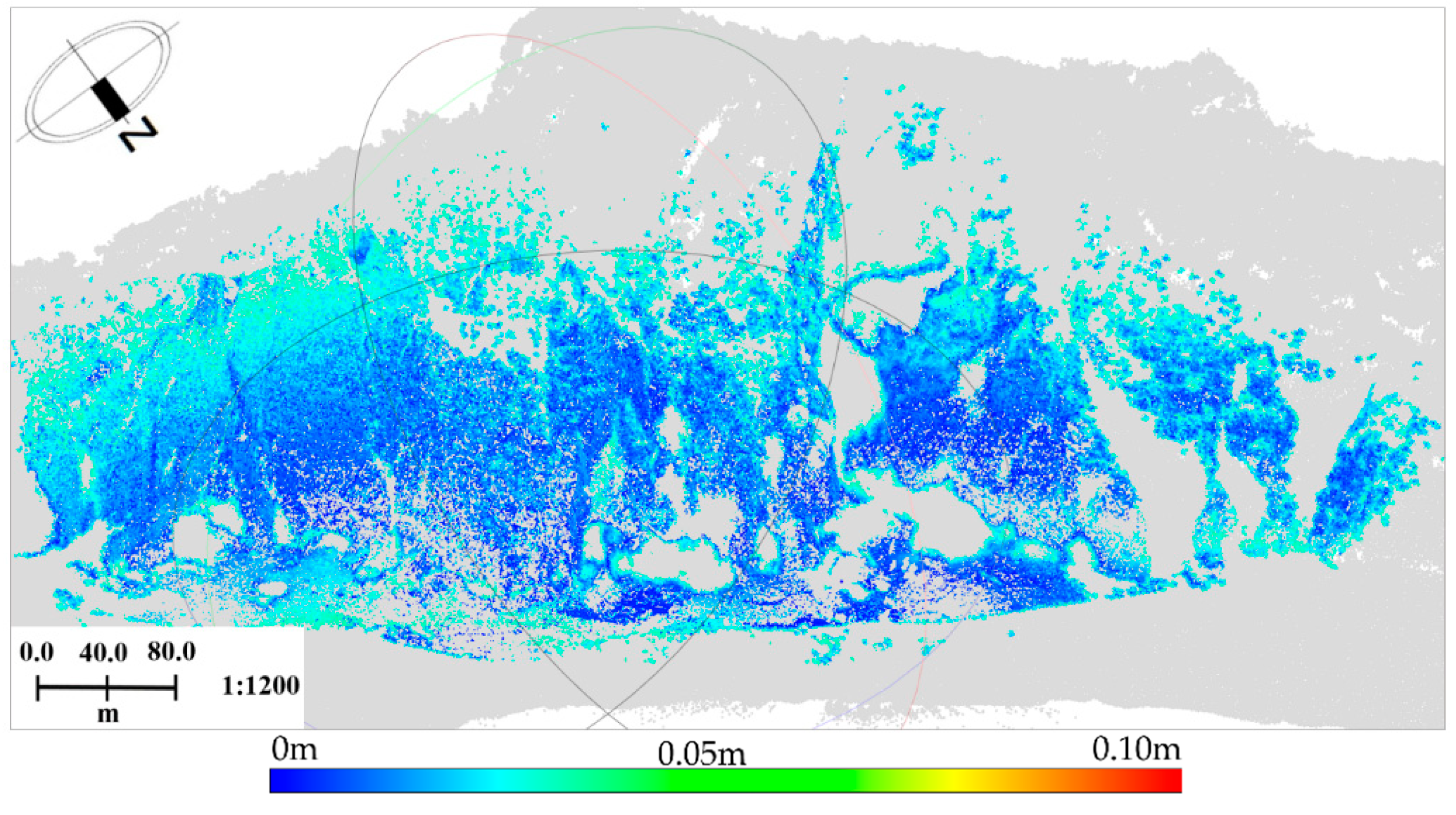
3.1.2. Accuracy Evaluation of Pairwise Registration and Multi-Station Adjustment
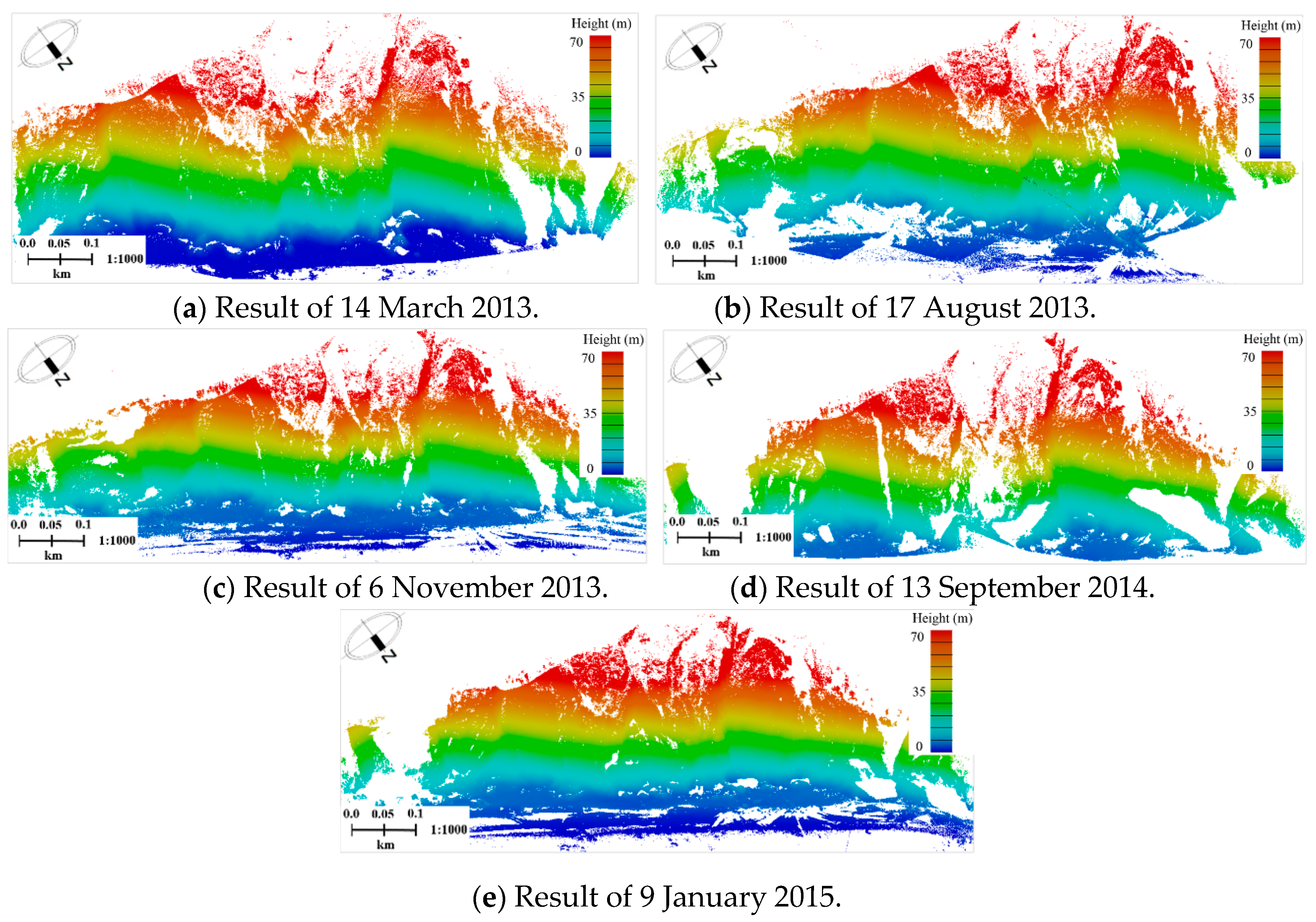
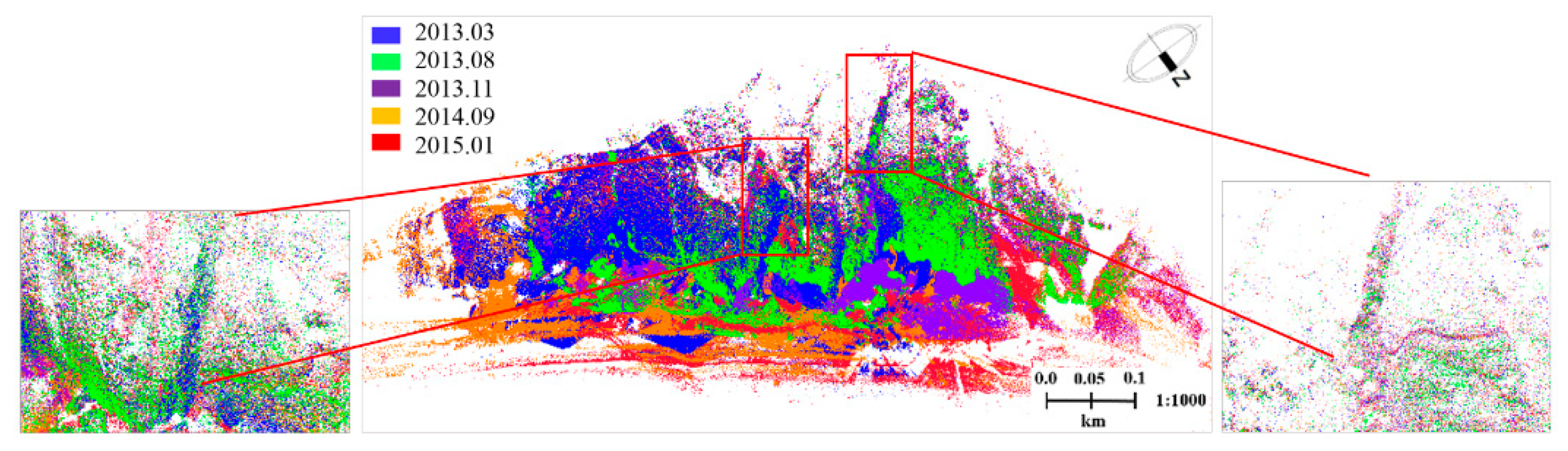
3.1.3. Registration Results of Multi-Temporal TLS Surveys
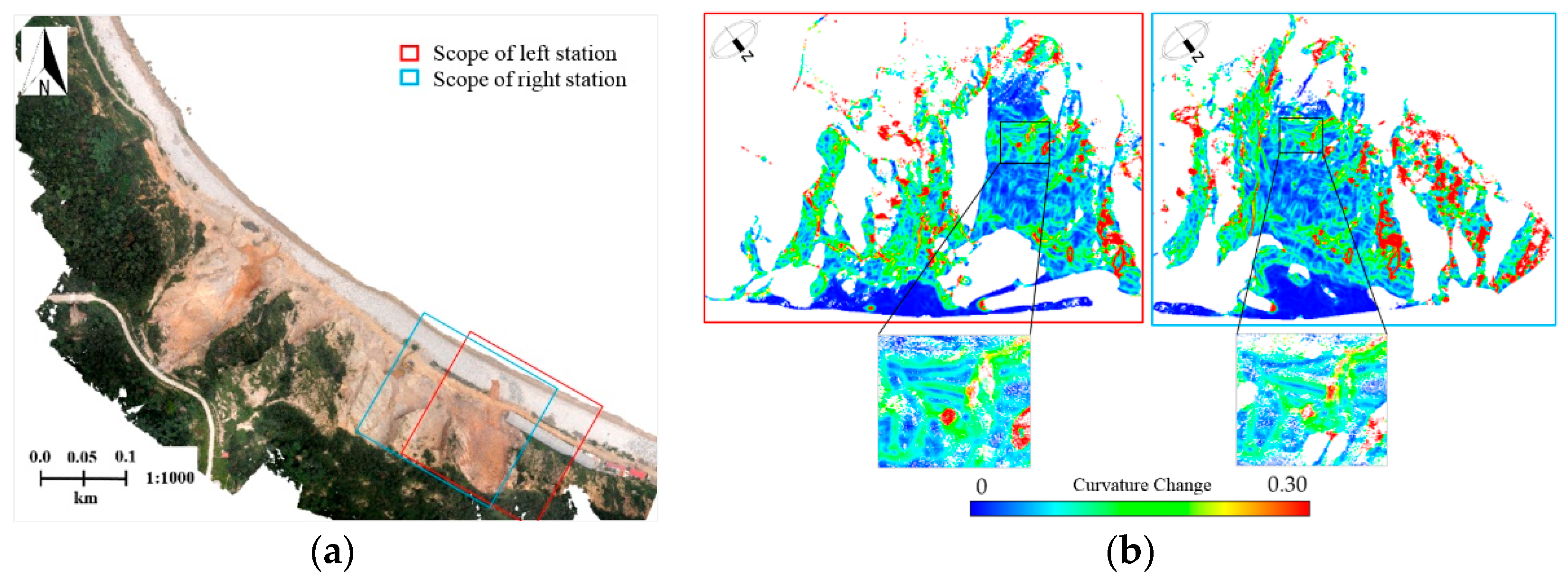
3.2. Experiments of Deformation Evaluation
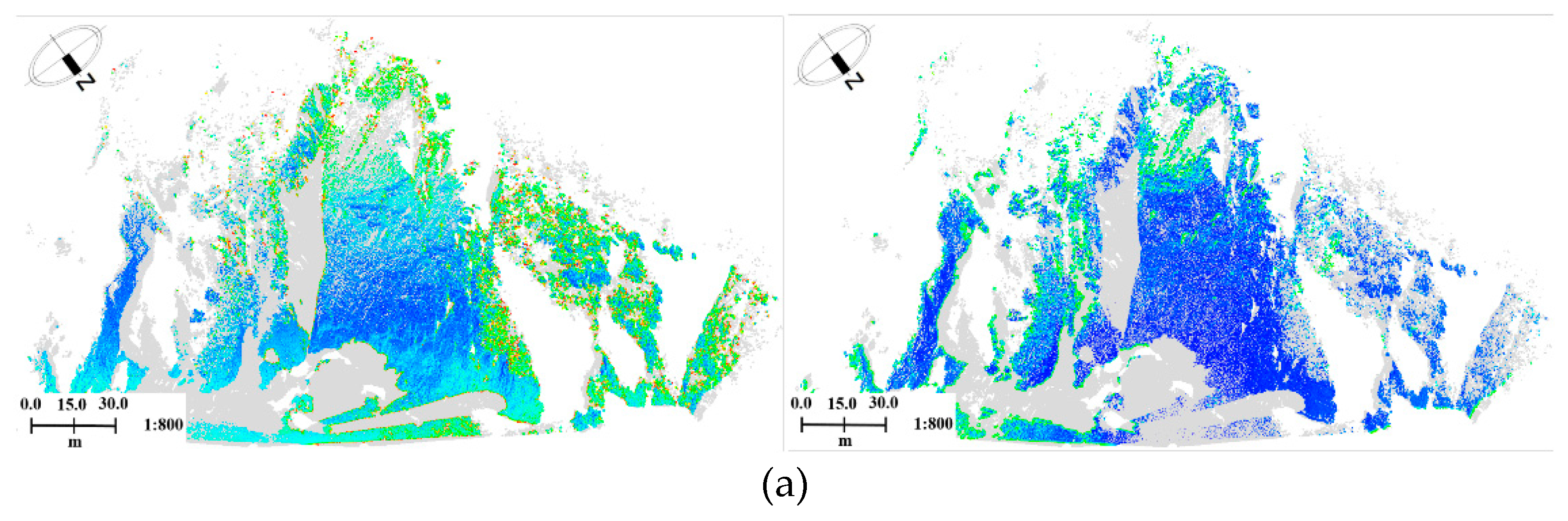
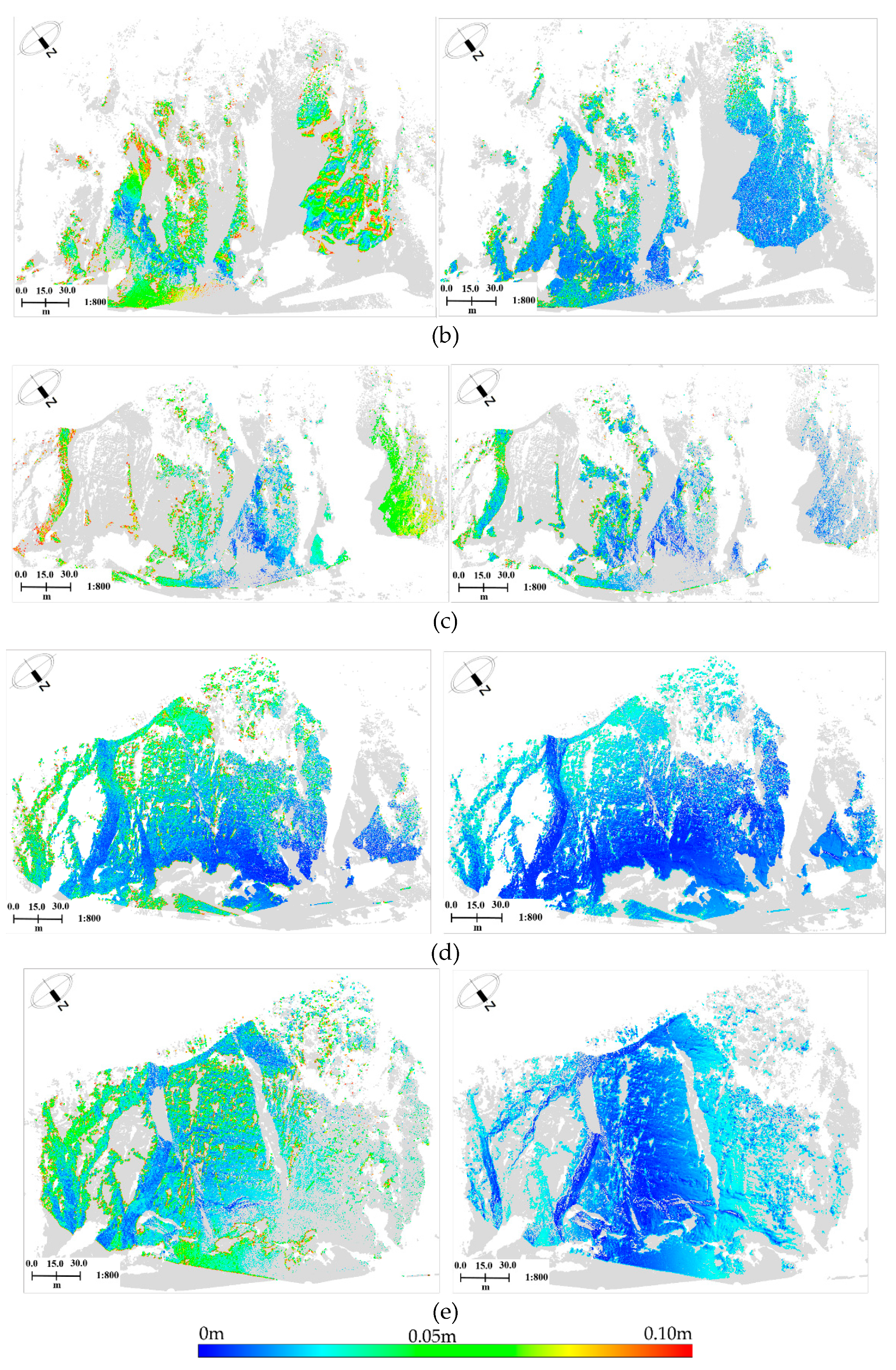
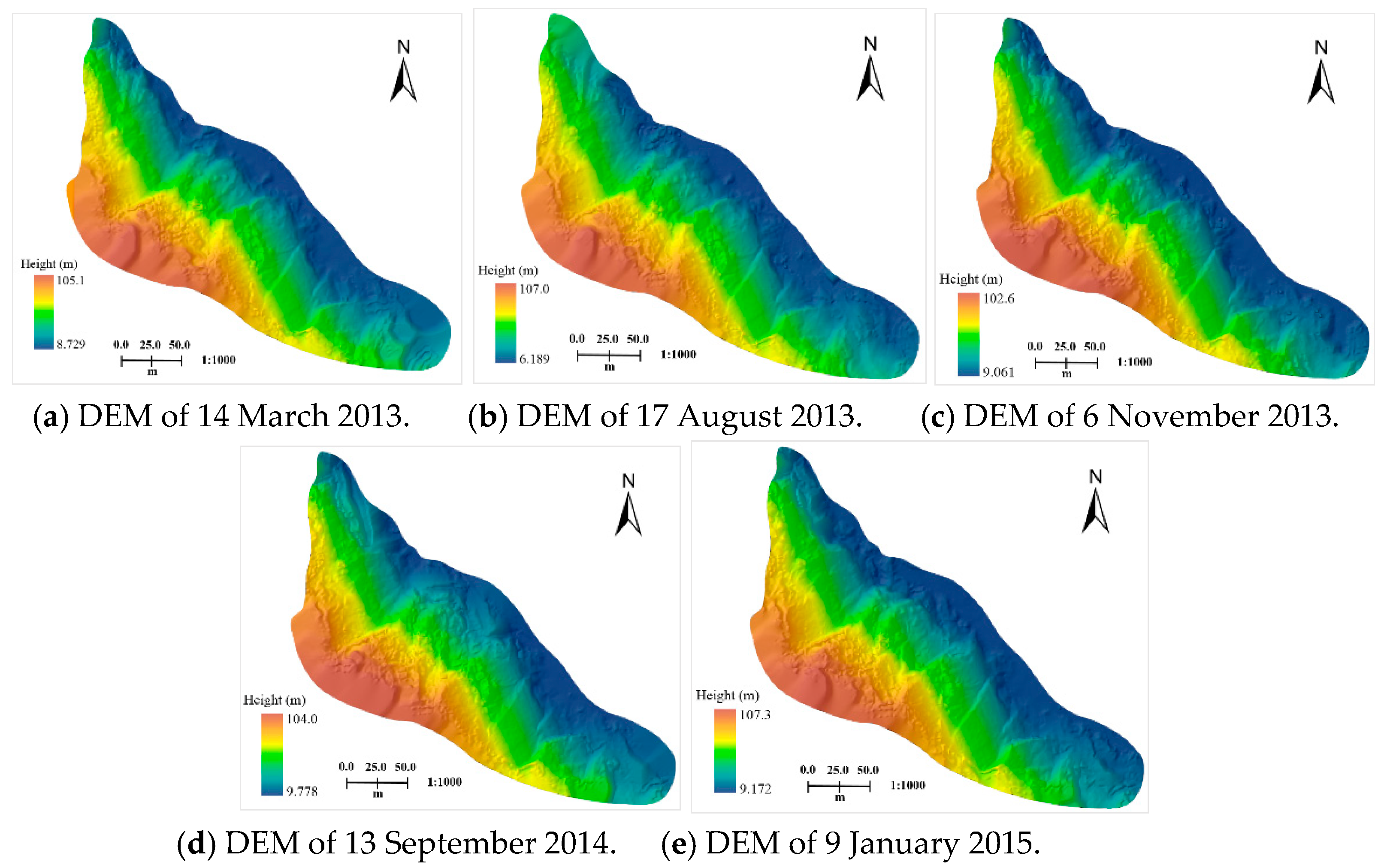
DEMs of Each Survey and Deformation Maps between Multi-Temporal DEMs
4. Discussion
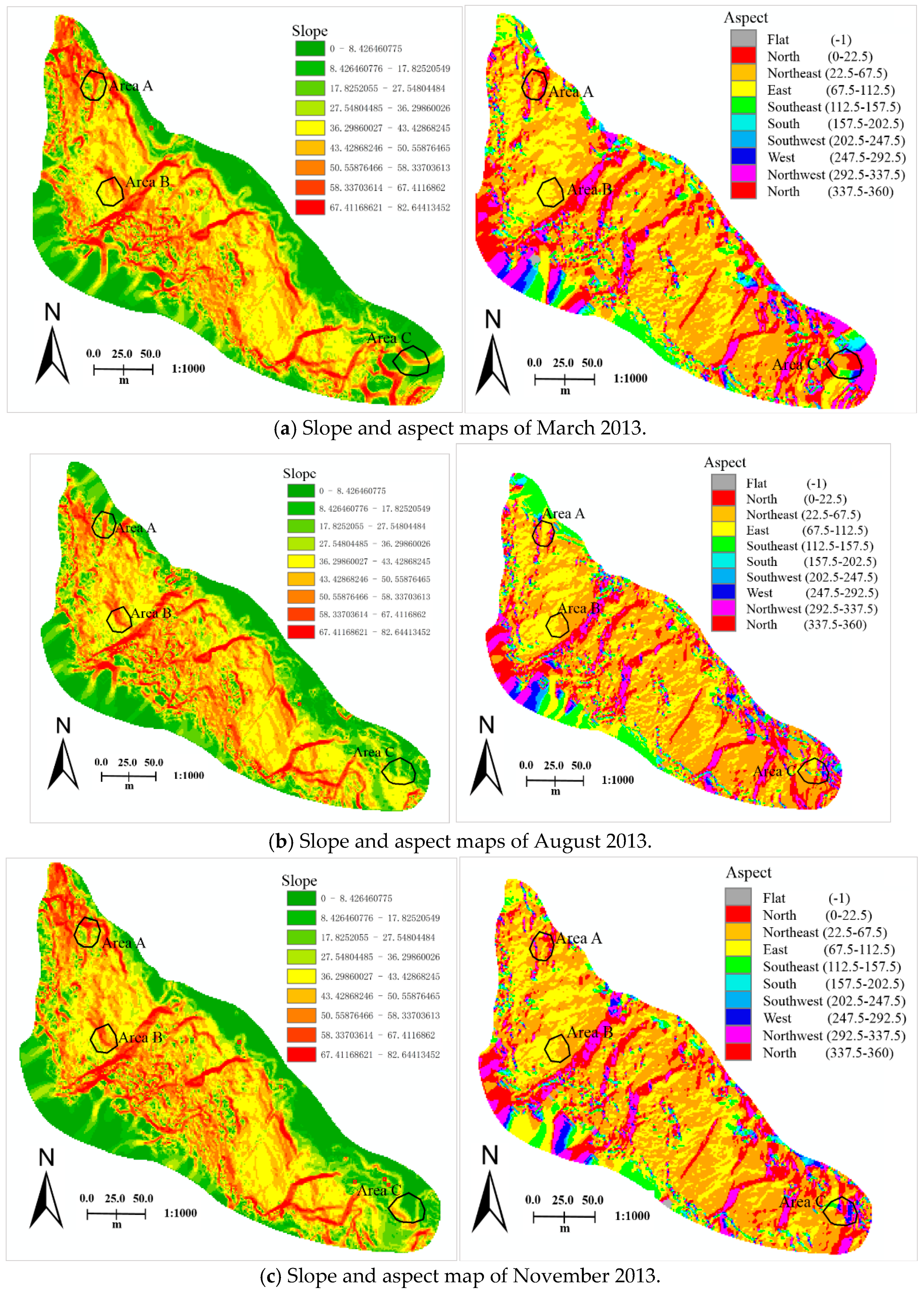
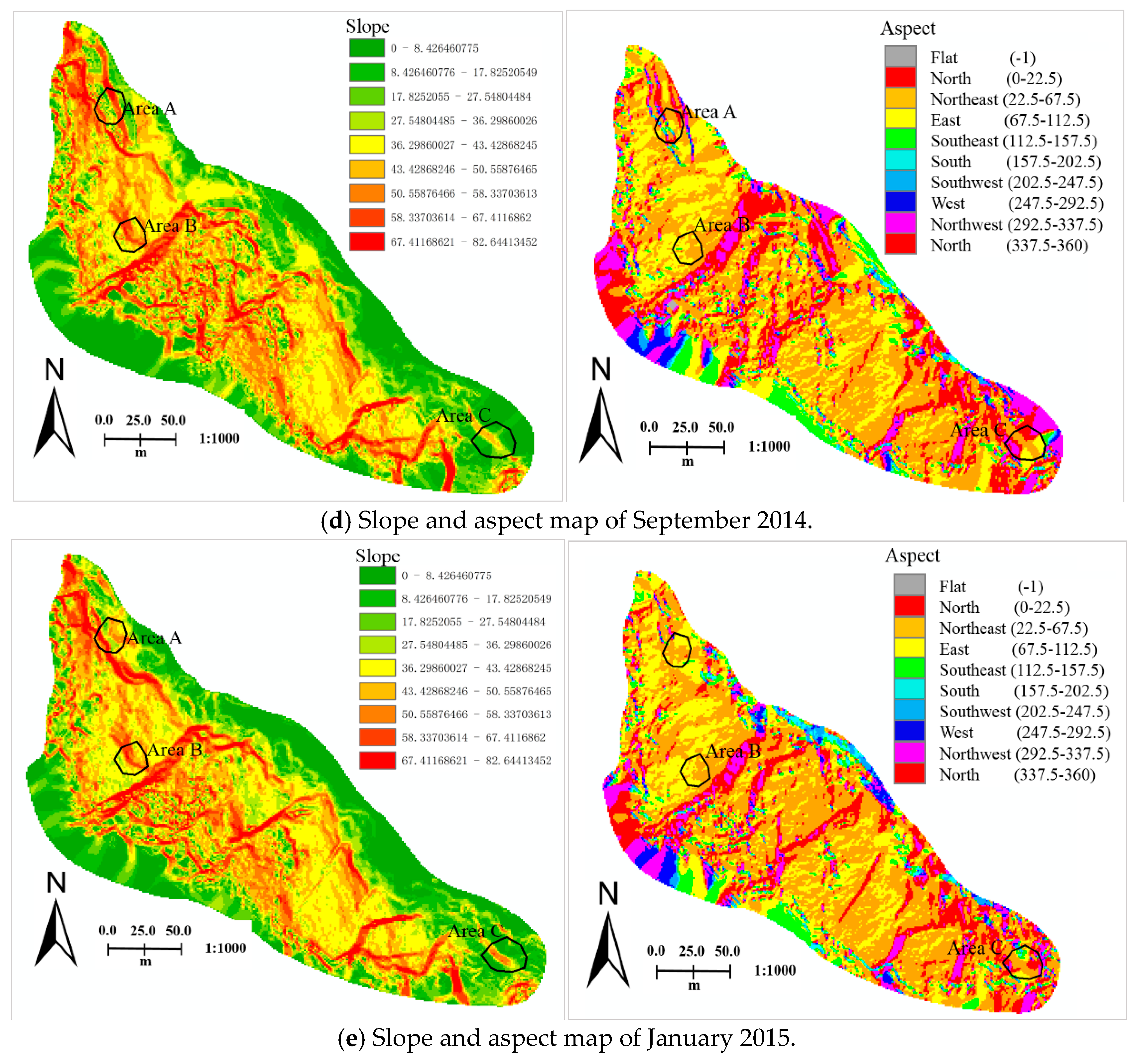
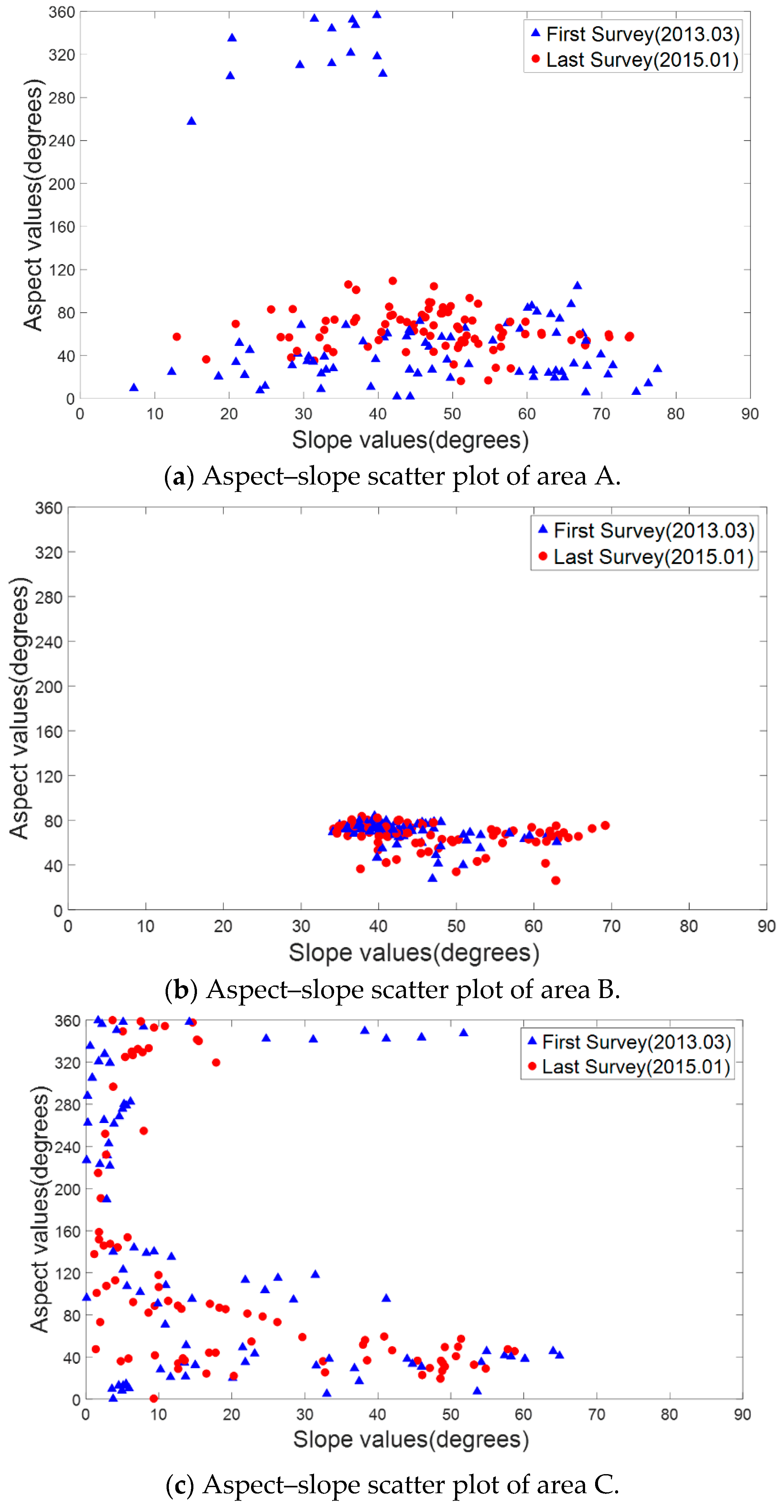
4.1. Slope and Aspect Maps of Multi-Temporal TLS Surveys
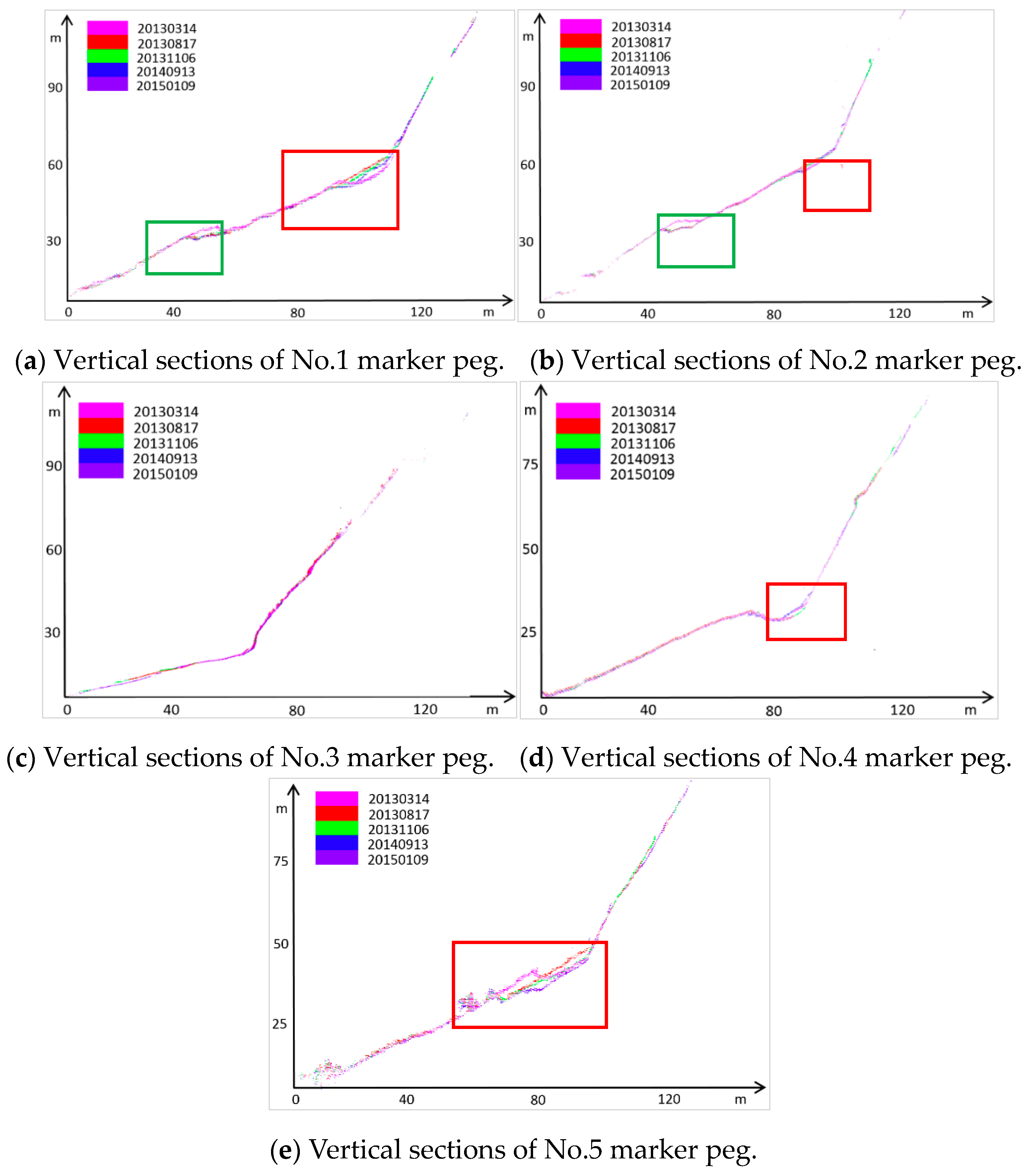
4.2. Vertical Sections of Marker Pegs
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lindenbergh, R.; Pietrzyk, P. Change detection and deformation analysis using static and mobile laser scanning. Appl. Geomat. 2015, 7, 65–74. [Google Scholar] [CrossRef]
- Guzzetti, F. Forecasting natural hazards, performance of scientists, ethics, and the need for transparency. Toxicol. Environ. Chem. Rev. 2016, 98, 1043–1059. [Google Scholar] [CrossRef] [PubMed]
- Salti, S.; Tombari, F.; Stefano, L.D. SHOT: Unique signatures of histograms for surface and texture description. Comput. Vis. Image Underst. 2014, 125, 251–264. [Google Scholar] [CrossRef]
- Lu, R.; Zhu, F.; Hao, Y.; Wu, Q. Simple and efficient improvement of spin image for three-dimensional object recognition. Opt. Eng. 2016, 55, 113102. [Google Scholar] [CrossRef]
- Kokkinos, I.; Bronstein, M.M.; Litman, R.; Bronstein, A.M. Intrinsic shape context descriptors for deformable shapes. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Providence, RI, USA, 16–21 June 2012; pp. 159–166. [Google Scholar]
- Rusu, R.B.; Blodow, N.; Beetz, M. Fast point feature histograms (FPFH) for 3D registration. In Proceedings of the IEEE International Conference on Robotics and Automation, 2009, ICRA’09, Kobe, Japan, 12–17 May 2009; pp. 3212–3217. [Google Scholar]
- Das, S.; Bhandarkar, S.M. Principal Curvature Guided Surface Geometry Aware Global Shape Representation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018; pp. 403–412. [Google Scholar]
- Bae, K.H.; Lichti, D.D. A method for automated registration of unorganised point clouds. ISPRS J. Photogramm. Remote Sens. 2008, 63, 36–54. [Google Scholar] [CrossRef]
- Bae, K.H.; Belton, D.; Lichti, D.D. A closed-form expression of the positional uncertainty for 3D point clouds. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 577–590. [Google Scholar]
- Ni, H.; Chen, S.; Gong, H.; Luo, Q.; Li, A. A Feature Point Based Registration of Brain Microscopic Images to the Reference Brain Atlas. In Proceedings of the International Conference on Photonics and Imaging in Biology and Medicine, Suzhou China, 26–28 September 2017; Paper W3A.84. Optical Society of America: Washington, DC, USA, 2017. [Google Scholar]
- Yang, B.; Zang, Y. Automated registration of dense terrestrial laser-scanning point clouds using curves. ISPRS J. Photogramm. Remote Sens. 2014, 95, 109–121. [Google Scholar] [CrossRef]
- Bosché, F. Plane-based registration of construction laser scans with 3D/4D building models. Adv. Eng. Inform. 2012, 26, 90–102. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Medioni, G. Object modeling by registration of multiple range images. In Proceedings of the IEEE International Conference on Robotics and Automation, Sacramento, CA, USA, 9–11 April 1991; pp. 2724–2729. [Google Scholar]
- Besl, P.J.; McKay, N.D. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Chen, J.; Belaton, B. An improved iterative closest point algorithm for rigid point registration. In Proceedings of the International Conference on Machine Learning and Cybernetics, Lanzhou, China, 13–16 July 2014; Springer: Berlin/Heidelberg, Germany, 2014; pp. 255–263. [Google Scholar]
- Dong, J.; Cai, Z.; Du, S. Improvement of affine iterative closest point algorithm for partial registration. IET Comput. Vis. 2016, 11, 135–144. [Google Scholar] [CrossRef]
- Li, W.; Song, P. A modified ICP algorithm based on dynamic adjustment factor for registration of point cloud and CAD model. Pattern Recognit. Lett. 2015, 65, 88–94. [Google Scholar] [CrossRef]
- Han, J.; Yin, P.; He, Y.; Gu, F. Enhanced ICP for the registration of large-scale 3D environment models: An experimental study. Sensors 2016, 16, 228. [Google Scholar] [CrossRef]
- Mohamad, M.; Ahmed, M.T.; Rappaport, D.; Greenspan, M. Super generalized 4PCS for 3D registration. In Proceedings of the 2015 International Conference on 3D Vision (3DV), Lyon, France, 19–22 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 598–606. [Google Scholar]
- Kim, P.; Chen, J.; Cho, Y.K. SLAM-driven robotic mapping and registration of 3D point clouds. Autom. Constr. 2018, 89, 38–48. [Google Scholar] [CrossRef]
- Lawin, F.J.; Danelljan, M.; Khan, F.S.; Forssén, P.; Felsberg, M. Density Adaptive Point Set Registration. arXiv, 2018; arXiv:1804.01495. [Google Scholar]
- Zhu, J.; Meng, D.; Li, Z.; Du, S.; Yuan, Z. Robust registration of partially overlapping point sets via genetic algorithm with growth operator. IET Image Process. 2014, 8, 582–590. [Google Scholar] [CrossRef]
- Tombari, F.; Salti, S.; Stefano, L.D. Unique signatures of histograms for local surface description. In Proceedings of the European Conference on Computer Vision, Heraklion, Crete, Greece, 5–11 September 2010; pp. 356–369. [Google Scholar]
- Guo, Y.; Sohel, F.; Bennamoun, M.; Lu, M.; Wan, J. Rotational projection statistics for 3D local surface description and object recognition. Int. J. Comput. Vis. 2013, 105, 63–86. [Google Scholar] [CrossRef]
- Geng, N.; Ma, F.; Yang, H.; Li, B.; Zhang, Z. Neighboring constraint-based pairwise point cloud registration algorithm. Multimedia Tools Appl. 2016, 75, 1–18. [Google Scholar] [CrossRef]
- Williams, J.; Bennamoun, M. Simultaneous registration of multiple corresponding point sets. Comput. Vis. Image Underst. 2001, 81, 117–142. [Google Scholar] [CrossRef]
- Huber, D.F.; Hebert, M. Fully automatic registration of multiple 3D data sets. Image Vision Comput. 2003, 21, 637–650. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.; Li, Z.; Du, S.; Ma, L.; Zhang, T. Surface reconstruction via efficient and accurate registration of multi-view range scans. Opt. Eng. 2014, 53, 102104. [Google Scholar] [CrossRef]
- Guo, R.; Zhu, J.; Li, Y.; Chen, D.; Li, Z.; Zhang, Y. Weighted motion averaging for the registration of multi-view range scans. Multimedia Tools Appl. 2017, 77, 1–18. [Google Scholar] [CrossRef]
- Zheng, L.; Yu, M.; Song, M.; Stefanidis, A.; Ji, Z.; Yang, C. Registration of long-strip terrestrial laser scanning point clouds using Ransac and closed constraint adjustment. Remote Sens. 2016, 8, 278. [Google Scholar] [CrossRef]
- Xu, Y.; Gao, J. Research on point cloud registration error of terrestrial laser scanning. J. Geod. Geodyn. 2011, 31, 129–132. [Google Scholar]
- Ji, Z.; Song, M.; Guan, H.; Yu, Y. Accurate and robust registration of high-speed railway viaduct point clouds using closing conditions and external geometric constraints. ISPRS J. Photogramm. Remote Sens. 2015, 106, 55–67. [Google Scholar] [CrossRef]
- Vosselman, G. Slope based filtering of laser altimetry data. Int. Arch. Photogramm. Remote Sens. 2000, 33, 935–942. [Google Scholar]
- Baltsavias, E.P. A comparison between photogrammetry and laser scanning. ISPRS J. Photogramm. Remote Sens. 1999, 54, 83–94. [Google Scholar] [CrossRef]
- Martínez-Carricondo, P.; Agüera-Vega, F.; Carvajal-Ramírez, F.; Mesas-Carrascosa, F.J.; García-Ferrer, A.; Pérez-Porras, F.J. Assessment of UAV-photogrammetric mapping accuracy based on variation of ground control points. Int. J. Appl. Earth Obs. Geoinf. 2018, 72, 1–10. [Google Scholar] [CrossRef]
- Jebur, M.N.; Pradhan, B.; Tehrany, M.S. Using ALOS PALSAR derived high-resolution DInSAR to detect slow-moving landslides in tropical forest: Cameron Highlands, Malaysia. Geomat. Nat. Hazards Risk 2015, 6, 741–759. [Google Scholar] [CrossRef]
- Wang, S.; Chen, Y.; Chen, H.; Luo, S.; He, L.; Tong, L. Estimation of ground deformation in mountain areas with improved SAR interferometry. In Proceedings of the Geoscience and Remote Sensing Symposium, Beijing, China, 10–15 July 2016; pp. 5947–5950. [Google Scholar]
- Tang, Y. Small baseline subsets approach of DInSAR for investigating land surface deformation along the high-speed railway. Proc. SPIE 2014, 9260. [Google Scholar] [CrossRef]
- Ye, X.; Kaufmann, H.; Guo, X.F. Landslide monitoring in the Three Gorges area using D-InSAR and corner reflectors. Photogramm. Eng. Remote Sens. 2004, 70, 1167–1172. [Google Scholar] [CrossRef]
- Wei, M.; Sandwell, D.T. Decorrelation of L-band and C-band interferometry over vegetated areas in California. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2942–2952. [Google Scholar]
- Klees, R.; Didier, M. Deformation measurements using SAR interferometry: potential and limitations. Geologie en Mijnbouw 1998, 77, 161–176. [Google Scholar] [CrossRef]
- Zhang, Y.; Meng, X.; Jordan, C.; Novellino, A.; Dijkstra, T.; Chen, G. Investigating slow-moving landslides in the Zhouqu region of China using InSAR time series. Landslides 2018, 1–17. [Google Scholar] [CrossRef]
- Niethammer, U.; James, M.R.; Rothmund, S.; Travelletti, J.; Joswig, M. Uav-based remote sensing of the super-sauze landslide: evaluation and results. Eng. Geol. 2012, 128, 2–11. [Google Scholar] [CrossRef]
- Nikolakopoulos, K.; Kavoura, K.; Depountis, N.; Kyriou, A.; Argyropoulos, N.; Koukouvelas, I.; Sabatakakis, N. Preliminary results from active landslide monitoring using multidisciplinary surveys. Eur. J. Remote Sens. 2017, 50, 280–299. [Google Scholar] [CrossRef] [Green Version]
- Torrero, L.; Seoli, L.; Molino, A.; Giordan, D.; Manconi, A.; Allasia, P.; Baldo, M. The Use of Micro-UAV to Monitor Active Landslide Scenarios. In Engineering Geology for Society and Territory—Volume 5; Springer International Publishing: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Turner, D.; Lucieer, A.; De, J.; Steven, M. Time series analysis of landslide dynamics using an unmanned aerial vehicle (UAV). Remote Sens. 2015, 7, 1736–1757. [Google Scholar] [CrossRef]
- Peppa, M.V.; Mills, J.P.; Moore, P.; Miller, P.E.; Chambers, J.E. Accuracy assessment of a UAV-based landslide monitoring system. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 895–902. [Google Scholar] [CrossRef]
- Prokop, A.; Panholzer, H. Assessing the capability of terrestrial laser scanning for monitoring slow moving landslides. Nat. Hazards Earth Syst. Sci. 2009, 9, 1921–1928. [Google Scholar] [CrossRef] [Green Version]
- Johan, K.; Christophe, D.; Pascal, A.; Pierre, P.; Marion, J.; Eric, V. Application of a Terrestrial Laser Scanner (TLS) to the Study of the Séchilienne Landslide. Remote Sens. 2010, 2, 2785–2802. [Google Scholar] [CrossRef]
- Castagnetti, C.; Bertacchini, E.; Rivola, R. A reliable methodology for monitoring unstable slopes: The multi-platform and multi-sensor approach. In Proceedings of the SPIE, Earth Resources and Environmental Remote Sensing/GIS Applications V, Amsterdam, The Netherlands, 23–25 September 2014; Volume 9245, p. 92450J. [Google Scholar] [CrossRef]
- Yufu, Z.; Bisheng, Y.; Fuxun, L.; Xiongwu, X. Novel Adaptive Laser Scanning Method for Point Clouds of Free-Form Objects. Sensors 2018, 18, 2239. [Google Scholar]
- Brenner, C.; Dold, C.; Ripperda, N. Coarse orientation of terrestrial laser scans in urban environments. ISPRS J. Photogram. Remote Sens. 2008, 63, 4–18. [Google Scholar] [CrossRef]
- Haala, N.; Cramer, M.; Rothermel, M. Quality of 3D point clouds from highly overlapping UAV imagery. ISPRS—Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2013, XL-1/W2, 183–188. [Google Scholar] [CrossRef]
- Fraser, R.H.; Olthof, I.; Maloley, M.; Fernandes, R.; Prevost, C.; Sluijs, J. UAV photogrammetry for mapping and monitoring of northern permafrost landscapes. ISPRS—Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-1/W4, 361. [Google Scholar] [CrossRef]
- Zhao, X.; Guo, Q.; Su, Y.; Xue, B. Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas. ISPRS J. Photogramm. Remote Sens. 2016, 117, 79–91. [Google Scholar] [CrossRef] [Green Version]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equipment Types | Helicopter md4-1000 | SONY ILCE-7R | Leica C10 |
|---|---|---|---|
| Critical Parameters | Cruising speed: 15.0 m/s. Rate of climb: 7.5 m/s. Weight: 2650 g. Maximum load: 2000 g. Recommended load: 800 g. Flying time: over 50 min Flight range: min. 500 m with remote control. | Focal length: 35 mm. Resolution: 36.4 Megapixel. Picture size: 7360 × 4912 Pixel. Shutter speed: 1/8000 s. Weight: 407 g. Camera size: 127 × 94 × 48 mm. | Range: 300 m. Scan rate: up to 50,000 points/s. Spot size: 4.5 mm. Point spacing: 1 mm. Filed-of-view: Horizontal 360°; Vertical 270°. Laser class: 2. |
| Stations | Pairwise Registration (m) | Multi-Station Adjustment (m) | Number of Overlap Points |
|---|---|---|---|
| T1 and T2 | 0.037 | 0.013 | 2,443,652 |
| T2 and T3 | 0.075 | 0.024 | 598,762 |
| T3 and T4 | 0.067 | 0.028 | 517,641 |
| T4 and T5 | 0.035 | 0.017 | 874,186 |
| T5 and T6 | 0.052 | 0.016 | 1,193,318 |
| UAV and TLS | 0.054 | 0.023 | 8,092,421 |
| Five TLS Surveys | TLS of March 2013 | TLS of August 2013 | TLS of November 2013 | TLS of September 2014 | TLS of January 2015 |
|---|---|---|---|---|---|
| Mean errors (m) | 0.023 | 0.043 | 0.016 | 0.037 | 0.013 |
| Number of overlap points | 8,092,421 | 5,507,327 | 11,334,672 | 4,710,162 | 10,263,734 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zang, Y.; Yang, B.; Li, J.; Guan, H. An Accurate TLS and UAV Image Point Clouds Registration Method for Deformation Detection of Chaotic Hillside Areas. Remote Sens. 2019, 11, 647. https://doi.org/10.3390/rs11060647
Zang Y, Yang B, Li J, Guan H. An Accurate TLS and UAV Image Point Clouds Registration Method for Deformation Detection of Chaotic Hillside Areas. Remote Sensing. 2019; 11(6):647. https://doi.org/10.3390/rs11060647
Chicago/Turabian StyleZang, Yufu, Bisheng Yang, Jianping Li, and Haiyan Guan. 2019. "An Accurate TLS and UAV Image Point Clouds Registration Method for Deformation Detection of Chaotic Hillside Areas" Remote Sensing 11, no. 6: 647. https://doi.org/10.3390/rs11060647
APA StyleZang, Y., Yang, B., Li, J., & Guan, H. (2019). An Accurate TLS and UAV Image Point Clouds Registration Method for Deformation Detection of Chaotic Hillside Areas. Remote Sensing, 11(6), 647. https://doi.org/10.3390/rs11060647