1. Introduction
High resolution Synthetic Aperture Radar (SAR) is regarded as one of the most suitable sensors for object detection and environment monitoring in the field of space technology. It offers wide coverage and ability to scan regardless of weather or time of day. The SAR images are characterized as having high resolution capability, not being dependent on the weather condition and independent of flight altitude. SAR always provides quality images at any condition because of their self-illumination ability. SAR images have a lot of applications in remote sensing and mapping of different surfaces of any planets including the earth. Other important applications of SAR imagery include oceanography, topography, glaciology, geology, forestry, biomass, volcano and earthquake monitoring. It is also useful in monitoring maritime activities like oil spills and ship detection.
Ship detection is an important topic in the field of remote sensing. At present, many object detection methods have been developed in the pattern recognition community. However, many of the proposed systems have computationally intensive problems for high accuracy performance. Before deep learning appeared, the traditional methods of target detection were roughly divided into region selections, e.g.,
scale-invariant feature transform (SIFT), and histogram of oriented gradients (HOG), and classifiers, e.g.,
support vector machine (SVM), and
Adaboost. After
AlexNet won
ImageNet’s image Classification Challenge in 2012, with very high accuracy and performance in object detection using deep learning, the application of neural networks for the latter has started booming [
1].
Because of the limited object detection improvement from the perspective of image analysis, the most straightforward idea for enhancing the computational time of the SAR image analysis is the use of
high performance computing (HPC) methods. Ref. [
2,
3,
4] clam that the use of GPU is a significant advance in recent years that makes the training phase of deep network approaches more practical. Due to the richness of the SAR image and the variability of the data, building accurate ship detection and classification model were almost impossible.
The deep learning models for object detection are of two types; the region proposal classification [
5] and the sliding window [
6]. The sliding window has better speed because the approach generates the bounding boxes in a single stage. Unlike sliding window approaches and the region proposal based approaches; YOLO sees the entire image during the training and testing periods and thus encodes contextual information about classes as well as their appearance. Faster region-based convolutional network (Faster R-CNN), a top detection method [
6], mistakes background patches in an image for objects because it can not see the larger context. The YOLO architecture makes less than half the number of background errors by Fast R-CNN.
The object detections using the
convolutional neural network (CNN) began to develop rapidly. Girshick et al. proposed
region-based convolutional network (R-CNN) [
7], fast R-CNN [
8] and faster R-CNN [
6] to prove their remarkable results. R-CNN uses selective search [
9] to extract region proposals and then uses CNN and other recognition techniques to classify it. However, R-CNN training stages are divided into multiple steps, tedious processes, time-consuming and slow training. Then, fast-R-CNN was proposed.
Fast-R-CNN reduces the computational complexity and improves the performance of R-CNNs [
7,
10,
11] by directly using the softmax function instead of SVMs.
Region of interest (ROI) polling reduces the computational complexity and further improves the performance of R-CNNs. Although Fast-R-CNNs has excellent performance results, it has limited speed performance due to bottlenecks in the proposed areas [
8]. Faster R-CNN [
10] unifies the candidate area generation, feature extraction, classification and location refinement into a deep network framework and implements a complete end-to-end CNN target detection model.
Region proposal network (RPN) model can not only quickly extract high-quality proposals and speed up target detection, but also improve the target detection performance [
12].
Although the faster-R-CNN achieves good detection results, its accuracy is not high enough. To meet high detection accuracy and high-speed performance requirements of real-time operation, Redmon et al. [
6] proposed another CNN-based unified target detection method. The proposed method, YOLO, predicts the bounding box and object class probability directly from the complete image in a single estimate. Since the entire detection pipeline is a single network, end-to-end optimization of the detection performance is straightforward. The YOLO [
13] model on the NVIDIA Titan X GPU runs in real time at 45 fps, with a
mean average precision (mAP) of 63.4% on the PASCAL VOC 2007 dataset [
12].
In addition to the region proposal and the sliding window method of ship detection, many methods have been proposed. The most common approach is called
constant false alarm rate (CFAR) which set a threshold that is supposed to keep the false alarm constant [
14,
15]. In CFAR, the sea clutter background is modeled according to a suitable distribution and a threshold is set to achieve an assigned probability of false alarm (PFA) [
15]. The performance of CFAR method is poor when the sea condition is rough. Therefore, a bilateral CFAR algorithm for ship detection in SAR images is proposed. This method can reduce the influence of SAR ambiguities and sea clutter, by means of a combination of the intensity distribution and the spatial distribution of SAR images [
16]. H. Greidanus et al. proposed SUMO which is a pixel-based CFAR detector for multi-look radar images [
17].
P.Iervolino et al. proposed a novel ship detection technique for sentinel-1 SAR data, the techniques is composed of three individual main steps: land masks rejection, detection and discrimination [
18]. In 2017, P.Iervolino, and R.Guida, proposed the
generalized-likelihood ratio test (GLRT) method to detect ship in real time or near real-time fashion [
15]. However, the identification of small vessels is still challenging especially when the sea conditions are rough. To solve this problem, incoherent dual-polarization method was proposed [
19,
20]. The algorithm considers the limited extension of small icebergs, which are supposed to have a stronger cross-polarization and higher cross- over co-polarization ratio compared to the surrounding sea or sea ice background [
20].
In this paper, we use the most advanced,
you only look once version 2 (YOLOv2) deep learning framework [
13], which is a well-known sliding window based deep learning model in the field of computer vision, as a base to implement vessel detection and adjust the parameters to achieve high accuracy performance in near real-time. In addition, we introduced a new architecture,
YOLOv2-reduced, having fewer layers due to elimination of some of the unrequired layers. The proposed architecture has less computational time compared with YOLOv2 on NVIDIA TITAN X GPU. YOLOv2-reduced is best for real time object detection problem. The performance of the YOLOv2 approach is evaluated on two different datasets and its performance is compared with region proposed approach Faster R-CNN. The performance of YOLOv2-reduced is evaluated on SSSD dataset and it reduces the computational time significantly.
The rest of this paper is organized as follows. In
Section 2, the general overview of YOLOv2 is introduced. The experimental results are presented in
Section 3. The newly proposed YOLOv2-reduced architecture is introduced in
Section 4. Finally, conclusions are remarked in
Section 5.
2. Methodology
In this paper, we construct a YOLOv2-based [
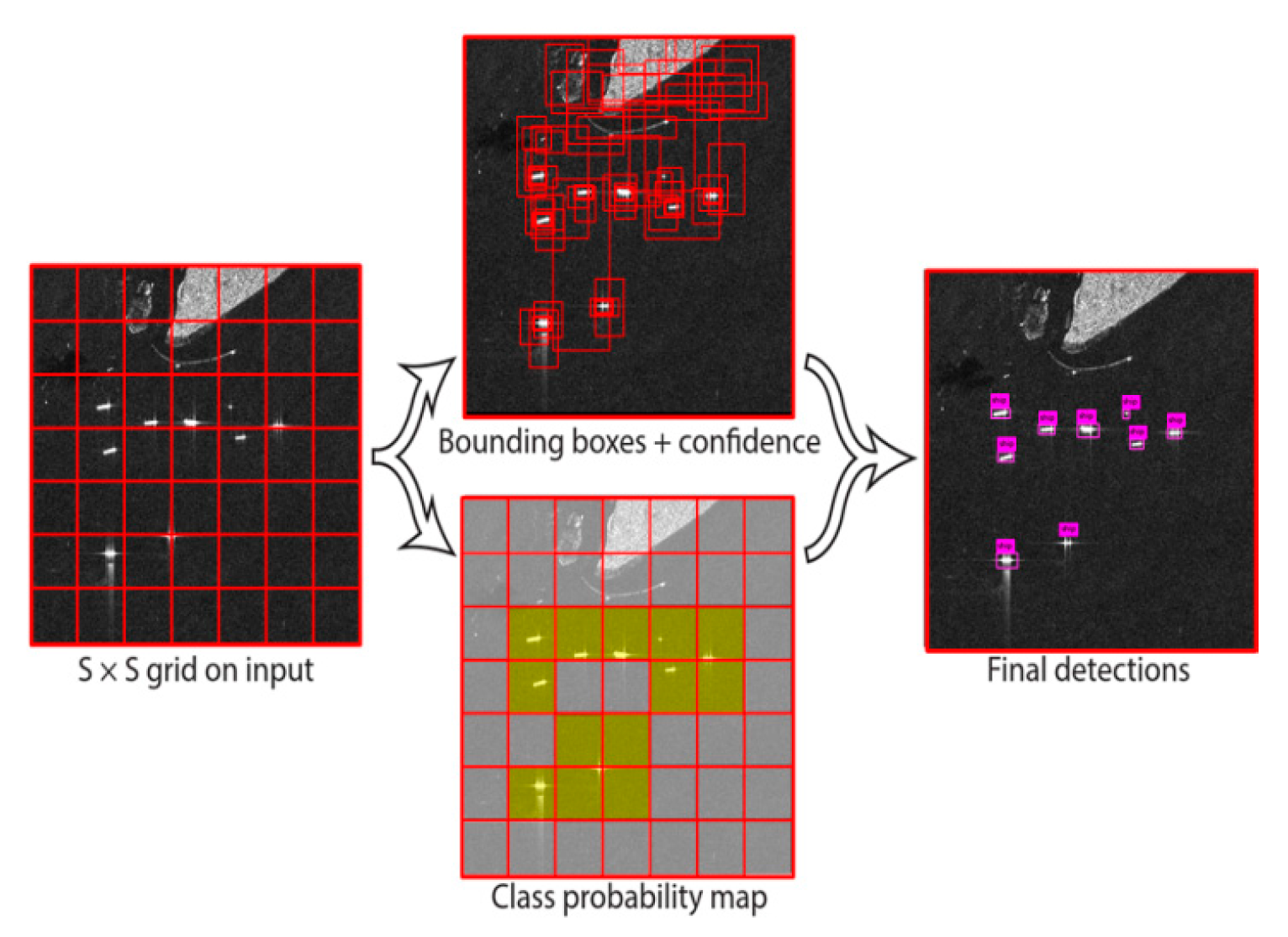
6] end-to-end training convolutional neural network to detect ships. First, YOLO [
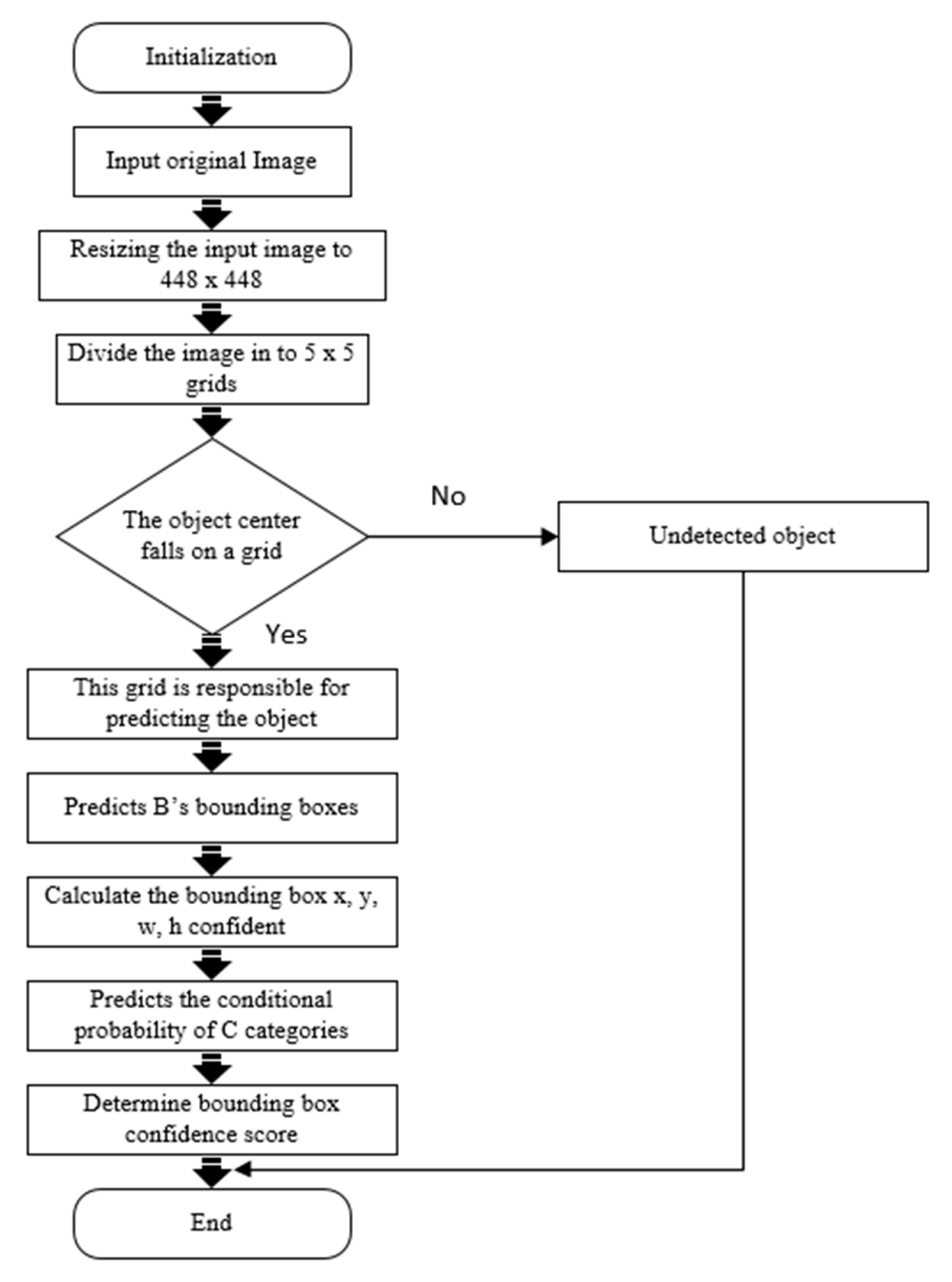
13] uses a single neural network to directly predict the bounding box and class probability. The SAR image is divided into an S × S grid of cells. Each grid cell predicts only one object. If the center of an object falls into a grid cell, that grid cell is responsible for detecting that object. Every grid cells predicts the B bounding boxes and the confidence score of that bounding boxes, and class probabilities. The bounding box prediction has 5 components: (x, y, w, h, confidence). The (x, y) coordinates represent the center of the box relative to the grid cell location. These coordinates are normalized to fall between 0 and 1. The (w, h) box dimensions are the width and the height of the bounding box also normalized to 0 and 1 relative to the image size.
The predicted confidence scores indicate how confident the model is that the box contains an object and also how accurate it thinks the box is that it predicts. If no object exists in that cell, the confidence scores should be zero. Otherwise, we want the confidence score to be equal to the
intersection over union (IOU) between the ground truth and the predicted box [
6]. Each grid cell makes B of those predictions, so there are in total S x S x B * 5 outputs related to bounding box predictions. In some cases, multiple objects can exit in a single grid cell. To solve the problem, we used the concept of anchor box. Anchor box makes it possible for the YOLOv2 algorithm to detect multiple objects centered in one grid cell. The idea of anchor box adds one more
dimension to the output labels by pre-defining a number of anchor boxes. Then, we will be able to assign one object to each anchor box.
Figure 1 depicted how the grids and bounding boxes are computed and looks.
Figure 2 is a detection flowchart of the YOLOv2 algorithm.
Table 1 shows that there are 30 layers of YOLOv2 [
6] network architecture, of which 22 layers are convolutional layers and 5 layers are the max pooling layers. The rest three layers are two route layers and one reorg layer. The route layers are performed at the 25th and 27th layers. The role of the route layer is to merge layers. For example, the 27th route is composed of layer 26 and layer 24, that is, the 26th and 24th layers are merged into the next layer. The final detection layer reorganizes the features extracted from the convolution layer to predict the probability and the bounding box of the ship. Assuming the input image size is 416×416.
Table 1 depicts the size of the image after each layer operation performed. After the successive operation on each layer, the output of the 30th layer size is 13 × 13 × 30. Finally, it is reduced to a 13 × 13 size grid. The output of each grid cell is 30, i.e., (5 × 6), where 5 values refers to the 5 predictive borders for each 13 × 13 grid cell, and the 25 values (30 minus 5) refers to that each border outputs 25 values. One of the six numbers is the probability of a ship. The other five numbers are the position and size of the bounding boxes
tx, ty, tw, th and the confidence of the bounding boxes.
In the object detection deep neural network, we used a pre-training model to enhance the detection performance.
Visual Geometry Group-16 (VGG -16) [
21] usually used as a pre-training model in many CNN versions. In YOLOv2, another pre-training model called darknet-19 is used to improve the accuracy and speed. YOLOv2 maintains almost the same accuracy as VGG-16.
YOLOv2 detection speed was at least 4 times faster than the VGG-16. Ref. [
22] compared the detection performance of VGG-16 and YOLOv2 with an input image of 224×224 size. VGG-16 requires 30.69 billion floating-point operations, and GoogLeNet-based [
23] YOLOv2 requires 8.52 billion floating-point operations [
6]. Darknet-19 is smaller and requires only 5.58 billion floating-point operations.
3. Datasets and Experimental Results
In this section the datasets used for the purpose of the experiment, the evaluation methods used and the result discussion will be explained.
3.1. The Datasets
In this work, we use two types of datasets. The first dataset is
SAR ship detection dataset (SSDD) [
5]. SSDD dataset contains ships in different environments. This dataset is a benchmark for researchers to evaluate their approaches. In SSDD, there are a totally of 1160 images and 2456 ships. The average number of ships per image is 2.12. This vessel dataset is provided by Li et al. [
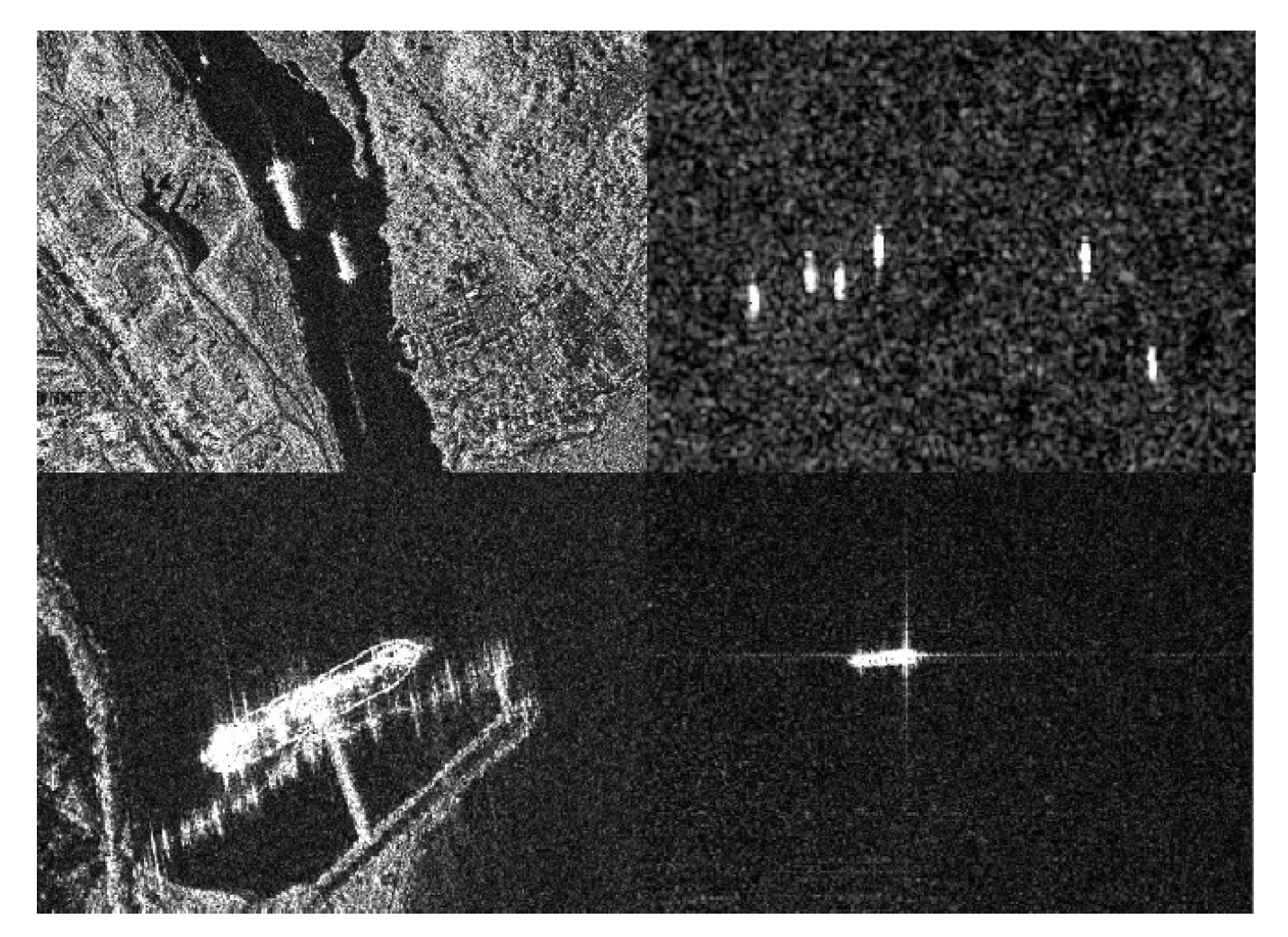
5]. In the object detection task, you must manually mark the border and label of each image object’s ground truth. While PASCAL VOC already provides standardized methods of image object’s ground truth labeling. The dataset we used also follows this method to construct bounding boxes and label annotations. We divide the dataset into three parts, i.e., the training set, validation set and the testing set with the proportion of 7:2:1. The SAR images in the dataset include a variety of ships with adjacent docks and land, isolated oceans, and side by side, as shown in
Figure 3.
The Second dataset,
Diversified SAR Ship Detection Dataset (DSSDD), is directly collected from different sources, e.g., RadarSat-2, TerraSAR-X and Sentinel-1, with more diversity in the ships and having various SAR image resolutions. We collected 50 SAR images from those different SAR image providers. The resolution of the SAR images ranges from 1m to 5m. The SAR image sizes ranged from 1,000 × 1,000 to 15,000 × 15,000. The collected images were too large to be used by the proposed deep neural architecture, which only accepts an image with size of 416 × 416 as an input. Therefore, we segment the images into smaller sub images each with a size of 416 × 416. From the 50 large images, 1,174 sub images having a size of 416×416 were prepared. Unlike SSDD dataset where the images are rescaled to make all the ships have relatively similar sizes, we used SAR images with different resolutions and sizes to build a model directly. This gives a chance to the model be robust to any type of dataset. The dataset distribution is shown in the below
Table 2.
In this paper, to annotate the SAR image, we used the LabelImg open source project on GitHub (tzutalin.github) [
22], which is currently the most widely used annotation tool. LabelImg directly converts the annotation message into PASCAL VOC and ImageNet specification XML format. For all 1,174 SAR images, the image annotation was done manually. The schematic diagram of the annotated vessel is shown in
Figure 4. The annotated image is used as an input to train the YOLOv2 architecture.
3.2. Evaluation Methods
To evaluate the YOLOv2 model, the following techniques were used: IoU, accuracy and mAP. IoU is the overlap rate of the predict bounding box and ground truth generated by the model. When IoU exceeds the threshold the bounding box is considered to be correct, as shown in Equation (1). This standard is used to measure the correlation between ground truth and prediction; the higher the correlation, the higher the value. Follow-up will use IoU to calculate the average precision of our detection model. By dropping the input image into the model for prediction, the predicted bounding box of ship
Bpred is obtained. However, if IoU of
Bpred and
Btruth is larger than the threshold value
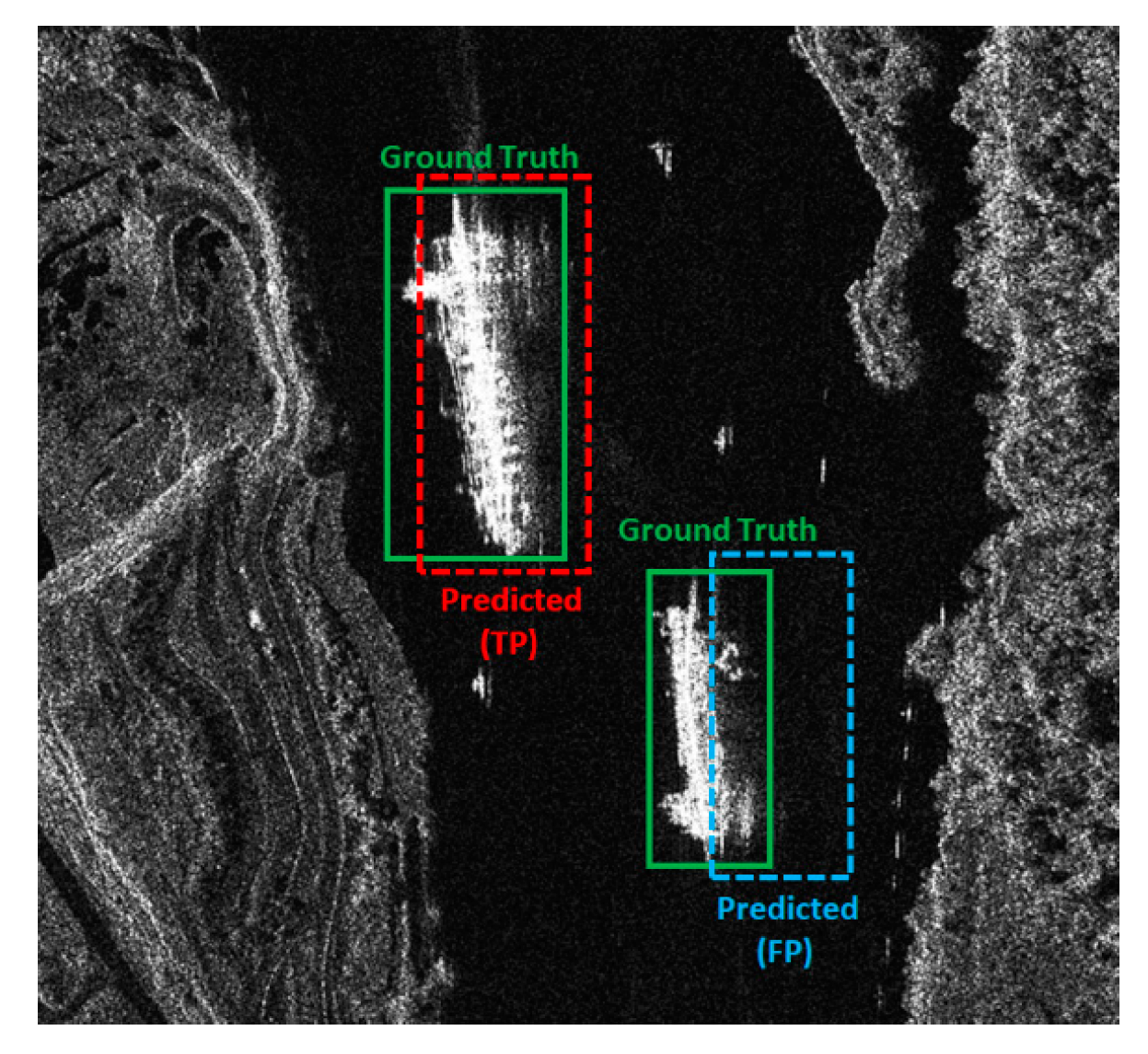
a0, and the following Equation (1) is satisfied at this time, it is regarded as a correct prediction. An example of detecting a ship in an image is shown in
Figure 5. The predicted bounding box is drawn in red or blue while the ground truth bounding box is drawn in green. Our goal is to compute the IoU between predicted bounding boxes and ground truth. When IoU is greater than the 50% threshold, the test result is a true positive (TP), and the value less than threshold, it is called a false positive (FP). The false negative (FN) indicates that the model predicts that there is no ship in the image, but actually the image does contain a ship. So, we can combine these into two metrics, which are precision and recall.
IoU is frequently used as an evaluation metric to measure the accuracy of an object detector. The importance of IoU is not only limited to assigning anchor boxes during preparation of the training dataset, but is also very useful when non-max suppression algorithm is used for cleaning up whenever multiple boxes are predicted for the same object. The value of a0 is assigned to 0.5, which mean at least half of the ground truth and the predicted box cover the same region. When IoU is greater than 50% threshold, the test case is predicted as a ship.
Precision is the ratio of true positives to the identified image:
where
n represents (true positives + false positives), which is the total number of photos recognized by the system.
Accuracy is the most intuitive performance measure and it is simply a ratio of correctly predicted observation to the total observations.
Recall’s denominator is true positives + false negatives. The sum of these two values can be understood as the total number (ground truth) of ships. The last evaluation method, mAP, is the area under the Recall and Precision curves. This value is between 0 and 1. Larger values of mAP represents better detection accuracy.
3.3. The Experimential Results
We trained the YOLOv2 ship detection model on two datasets. The first dataset is SSDD dataset which contains preprocessed SAR images and the ships in the images had a similar size.
The DSSDD dataset is directly collected from different SAR image venders which have different sizes and resolutions. The dataset is a real dataset which makes the model robust to different scenarios.
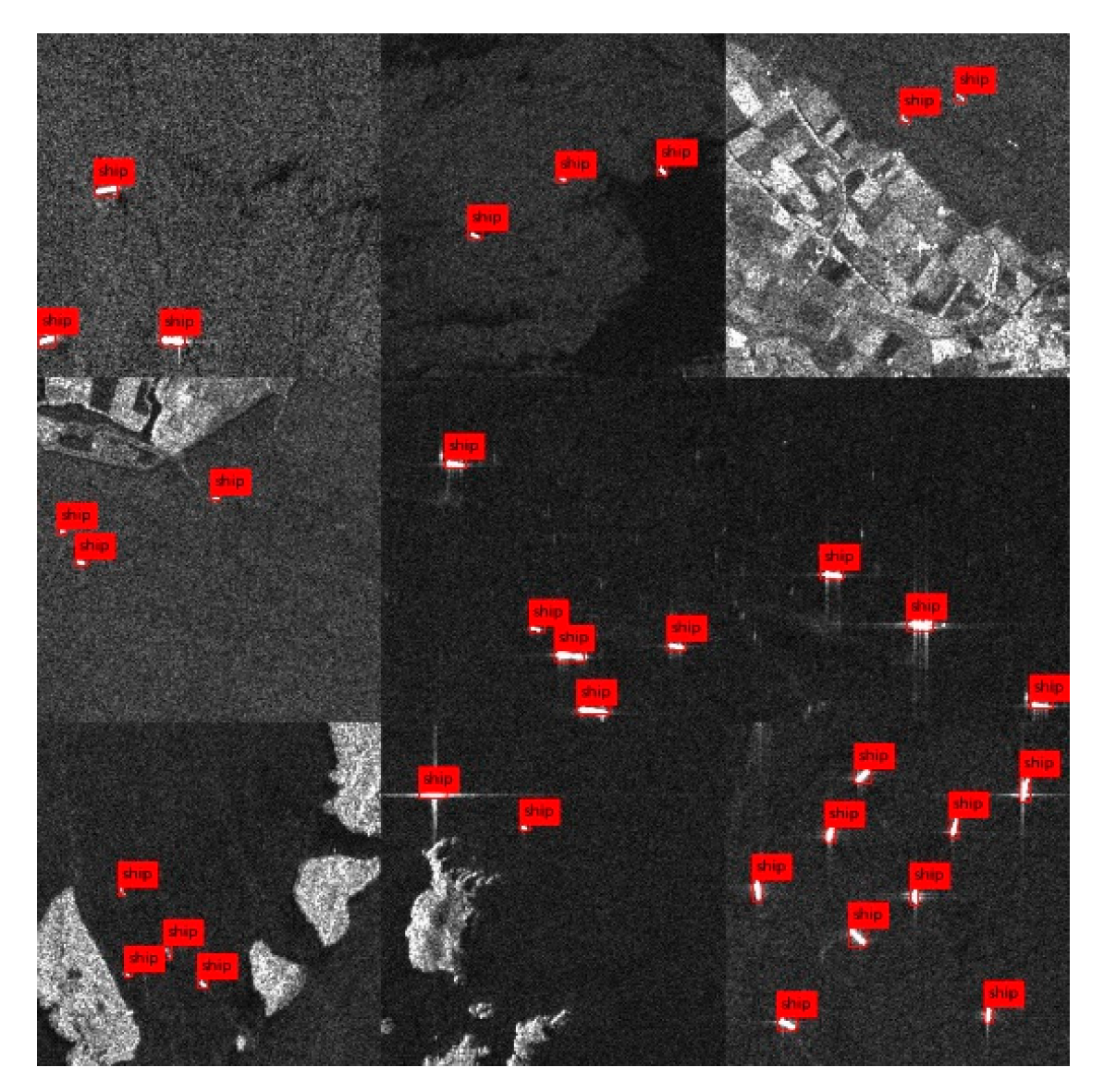
Figure 6 depicts some ship detection results on DSSDD dataset. The newly proposed YOLO-reduced architecture was trained on the SSDD dataset only. For the sake of fair comparison, all the experiments were performed using a PC with Intel(R) Xeon(R) E3-1226 v3 @ 3.40GHz × 24 and 64 GB of memory, NVIDIA TITAN X GPU with 12G memory and using CUDA8.0 cuDNN6.0. The operating system was 64-bit Ubuntu 16.04. We adopted a well-known open source framework, namely the
Darknet framework [
10], to train our deep learning models. Darknet-19 which had been pre trained on VOC 2007+2012 was selected to be the backbone of our CNN network. The results of this study verify the correctness and effectiveness of the method in both accuracy and computational cost.
From the experiment, we observed that the proposed method greatly improved the accuracy to 90.03% on the first SSDD dataset. The results are shown in
Table 3.
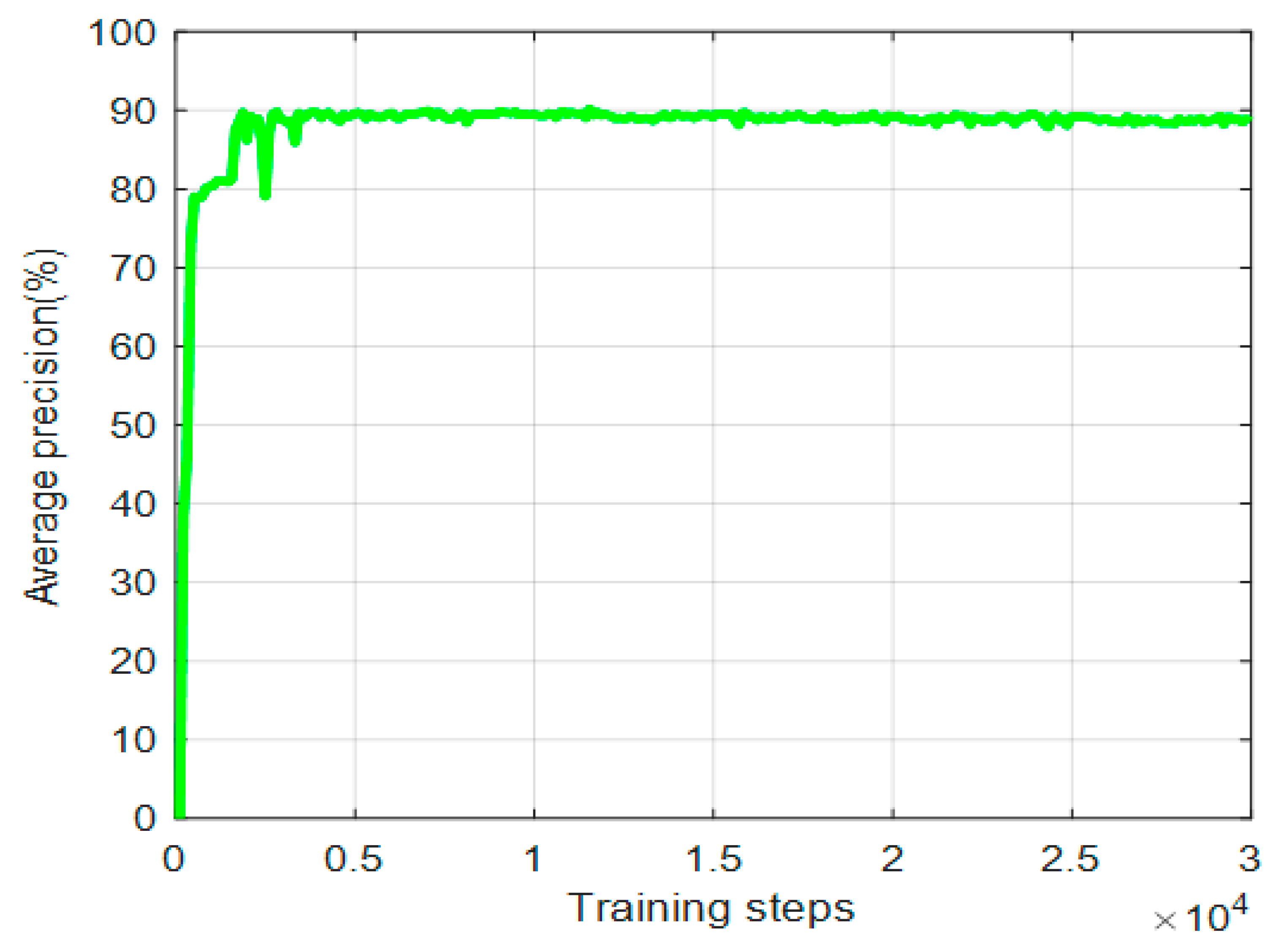
The YOLOv2 training model had a learning rate of 0.0001 and batch size of 128. As
Figure 7 clearly depicts, the total training had 30,000 iterations. The average accuracy is not stable until approximately 3000 iterations. We use convolutional weights that are pre-trained on the ImageNet. Overall, this pre-trained weight is also suitable for SAR image of ships, which is helpful for the training performance of the network.
We again tested the performance of the YOLOv2 training model on another dataset, collected from the different SAR image providers with a different resolution. Unlike the SSDD dataset, the image was not rescaled to make the different resolution image have a relatively similar size, in order to make the detection much better. The results are depicted in
Table 4.
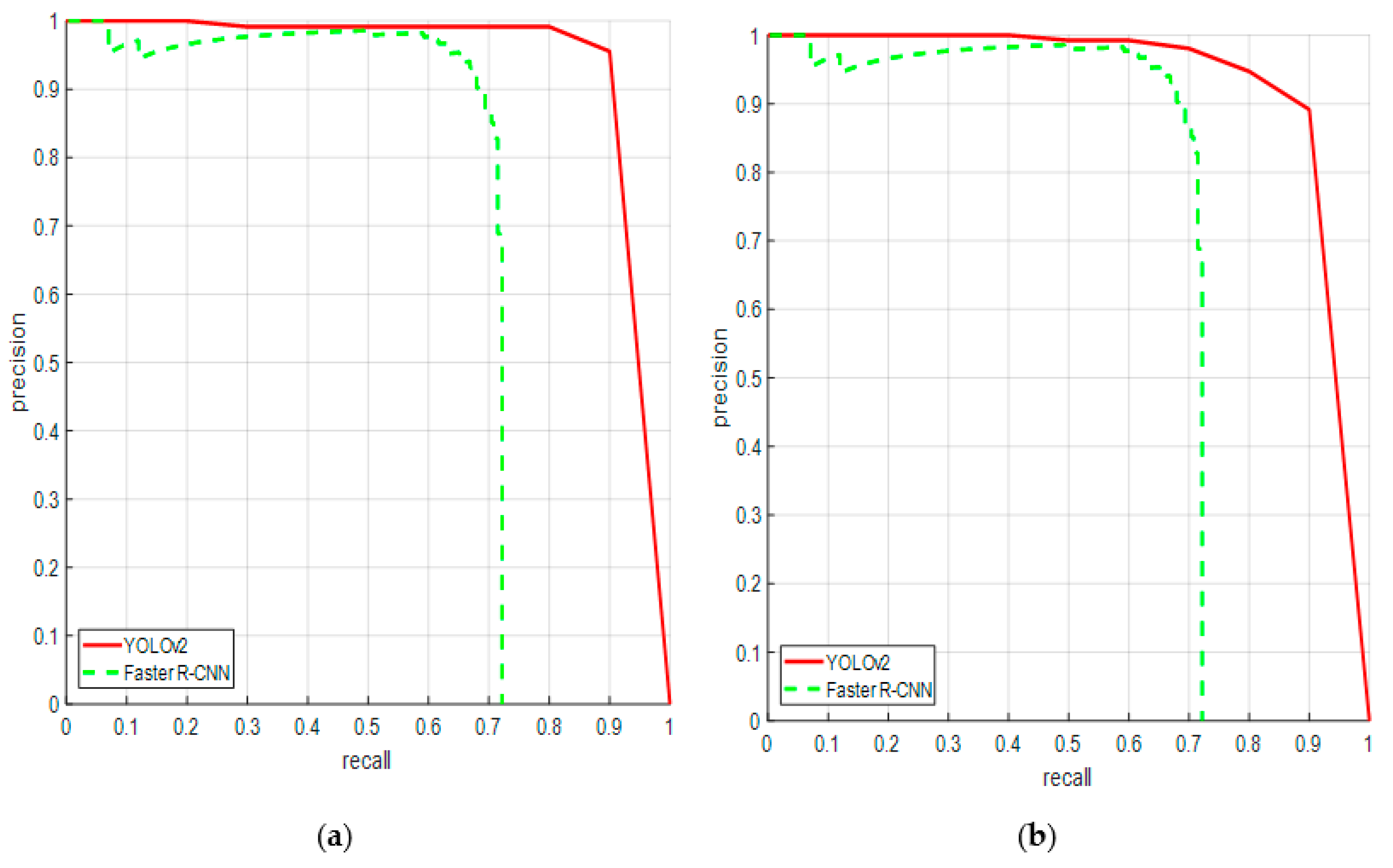
As shown in
Figure 8a, YOLOv2 method had an
average precision (AP) value of 90.05% on the testing set, which was higher than the 70.63% from the Faster R-CNN method on the SSDD dataset. The single-stage neural network YOLOv2 guarantees the detection speed, and has good detection performance. As shown in
Figure 8b, the YOLOv2 method had an AP value of 89.13% on the testing set, which is higher than the 68.43% from the Faster R-CNN method on the DSSDD dataset.
In most cases, deep learning methods yield more promising results when a larger percent of the dataset is used as training data. We evaluated the robustness of the YOLOv2 architecture with a small number of datasets as a training dataset. For this purpose, unlike the above experiment that used 70 percent of the data to train the model, we used only 20 percent of the total data for training the architecture, and used 70 percent and 10 percent of the data for testing and validation respectively.
Table 5 clearly shows the model has a good performance score even with smaller amounts of training data.
3.4. Comparing Different Image Sizes and Resolutions
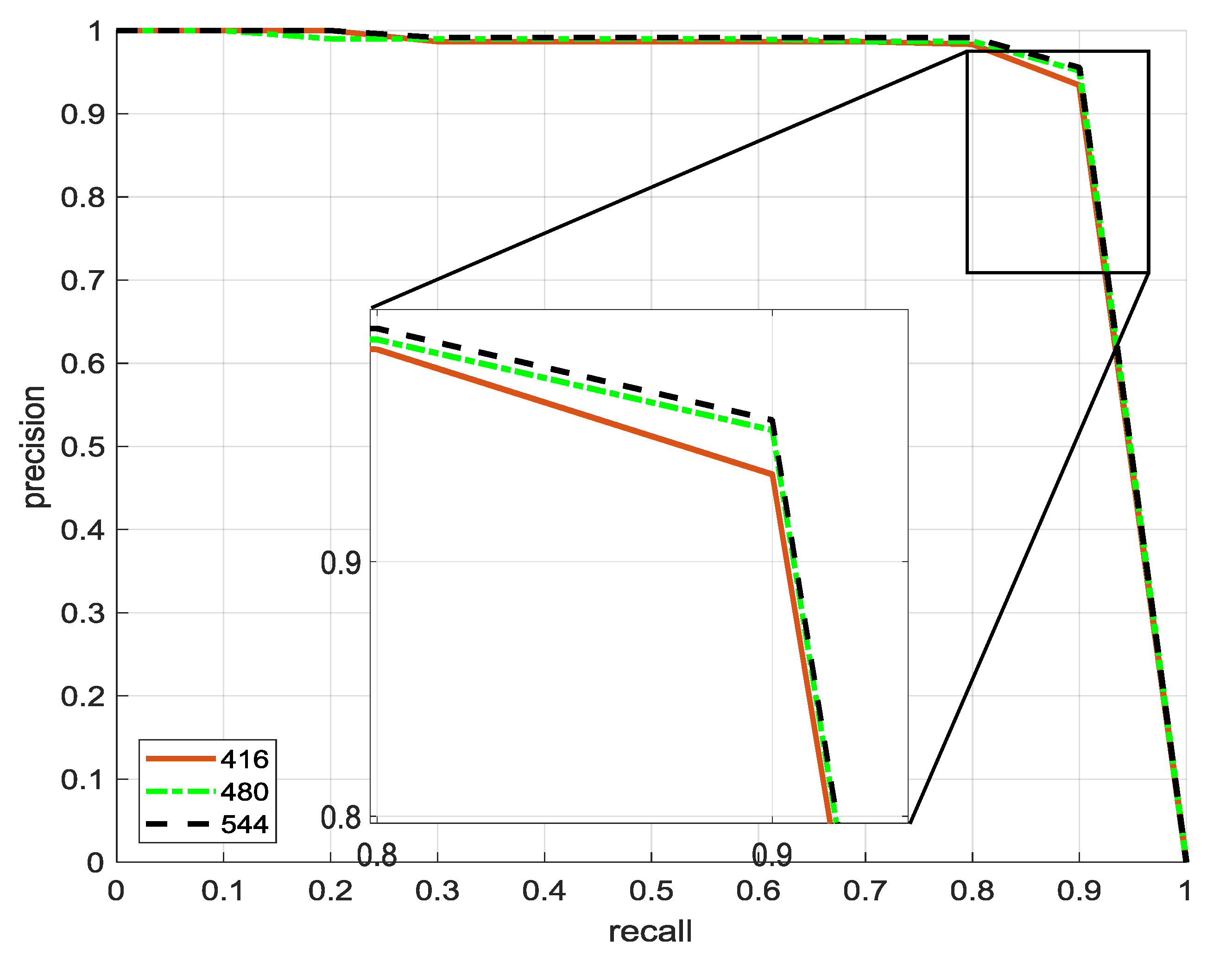
In this paper, we also tried to evaluate the performance of the YOLOv2 architecture with different image sizes and to assess the impact of image size on the detection performance of the model. For this purpose, we selected the SSDD dataset with three different image sizes 416 × 416, 480 × 480 and 544 × 544. The YOLOv2 network architecture detection performance was 89.56, 89.75 and 90.5 percent, respectively.
From the experimental results, we can see that the size of the input image to the network had a huge impact on the complexity of the convolutional neural network. Even though the detection performance was higher when the image size was increased, the average time complexity was inversely proportional to the detection performance.
Table 6 depicts a detailed comparison of those different image sizes, where BFLOPS stands for
billion floating point operations per second.
If the detection execution time is taken into consideration, 416×416 was the best choice. In conclusion, the greater the size of the image, the higher the average accuracy of the ship detection, but at a cost of about 1.6 times the execution time. In this study, the average accuracy was taken as the first consideration, and an image with a size of 544 × 544 was our best choice.
Figure 9 shows the precision recall curves for the different image sizes. The three resolution curves are essentially overlapping because the APs of the three were very close.
Interestingly, we evaluated the YOLOv2 architecture performance with different spatial resolution images. The resolution had a direct impact on the quality of the image. If the image quality is poor, the docks, shores or canals have a tendency to appear as a ship, and that will reduce the detection rate. To make our model more robust, we collected different SAR images with various resolutions ranging from 1 m to 5 m. In reality, the SAR images provided had different resolutions. To make our model suitable for all different SAR images in real time, we used SAR images with different resolutions as the training data for our model. We conducted the experiments with 10 SAR images from each sensor type as the testing datasets. The first 10 images were tested from a sentinel-1 sensor, with a resolution of 5 m. The second 10 SAR images that were tested were from a TerraSAR-X sensor, which has a resolution of 1 m. The experimental results in
Table 7 show that the resolution of SAR images and their detection performance are inversely proportional.
From the experimental results, we can see that the YOLOv2 model required less computational time than the faster RCNN. The model’s computational time was not similar on both datasets. The YOLOv2 computational time on the DSSDD dataset was bigger than the SSDD dataset. In this paper, we applied a preprocessing stage that divided the large image into smaller sizes to make the detection more convenient for the model. It is possible to estimate the execution time for more realistic SAR dataset dimensions. The larger the SAR image, the greater the execution time.
3.5. Network Optimization
In this research, besides evaluating the performance of the state of the art detection method on SAR imagery, we developed our own new architecture that has less layers. In YOLOv2, the route layer is a feature map that combines the features of the underlying convolutional layer (with large features) and the previous layer of convolutional layers. The Reorg (reorganization) layer is used to reorganize the feature map size so that the route layer is the same size as the convolution layer to be added.
In order to effectively improve the performance of the ship detection problem, we examined the nature of ships with respect to the background. The size of the ship is much smaller than the size of the whole picture. The size of a ship is 52 × 5 pixels, which only accounts for 0.09% of the picture in a picture of 544 × 544 pixels. Thus, compared to the size of the whole image, the ship size is too small. So, suitable network architectures must be designed to find more effective features.
According to the CNN architecture proposed in the related literature [
2,
5,
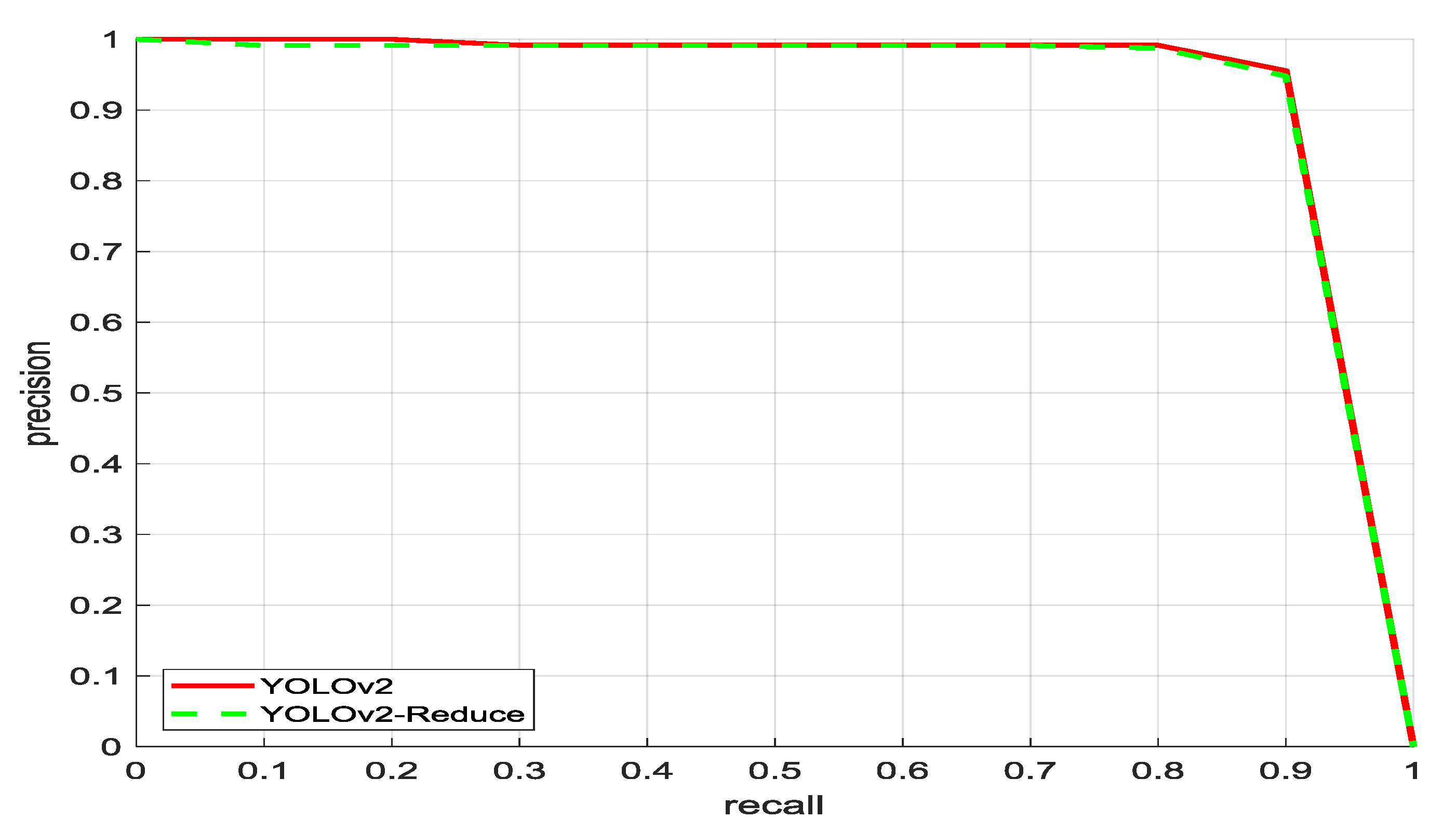
6], we improved the original YOLOv2 network architecture. The newly proposed architecture, the YOLOv2-reduced model, has a lower number of layers.

 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}