UAV-Based Automatic Detection and Monitoring of Chestnut Trees

 ,
,  ,
,  ,
,  , and
, and
Abstract
:1. Introduction
2. Materials and Methods
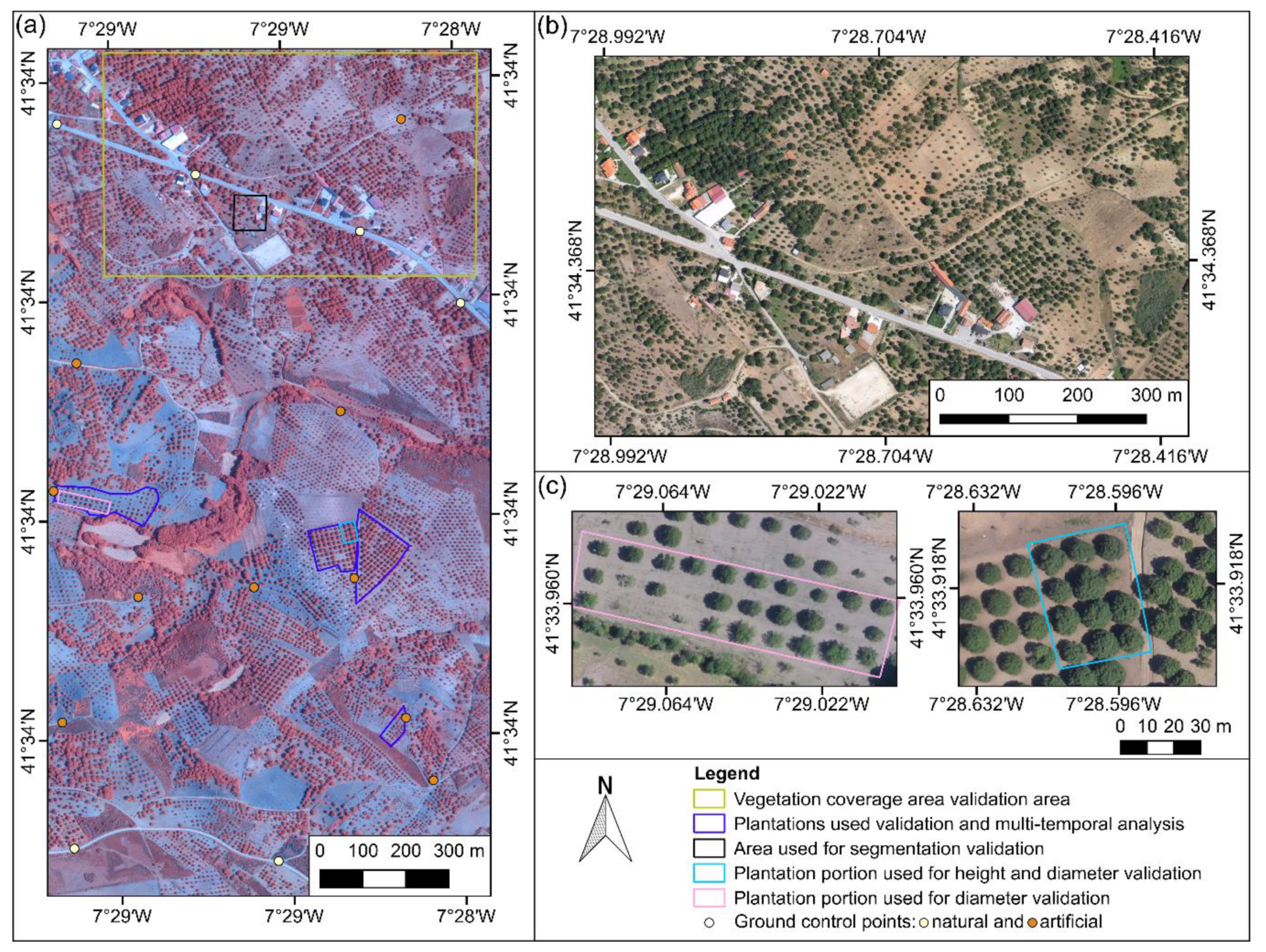
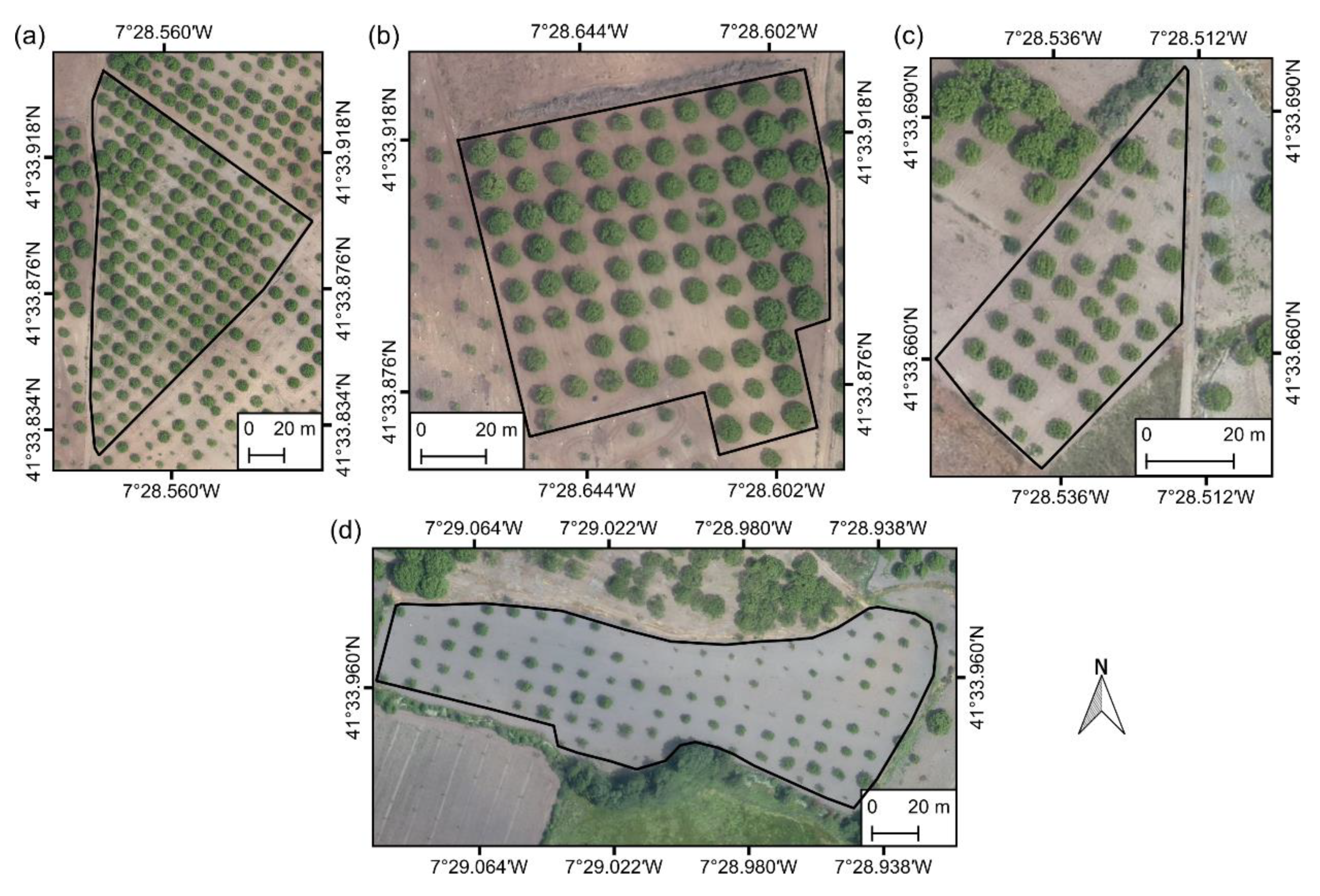
2.1. Surveyed Area and Data Acquisition
2.2. UAV Imagery Pre-Processing
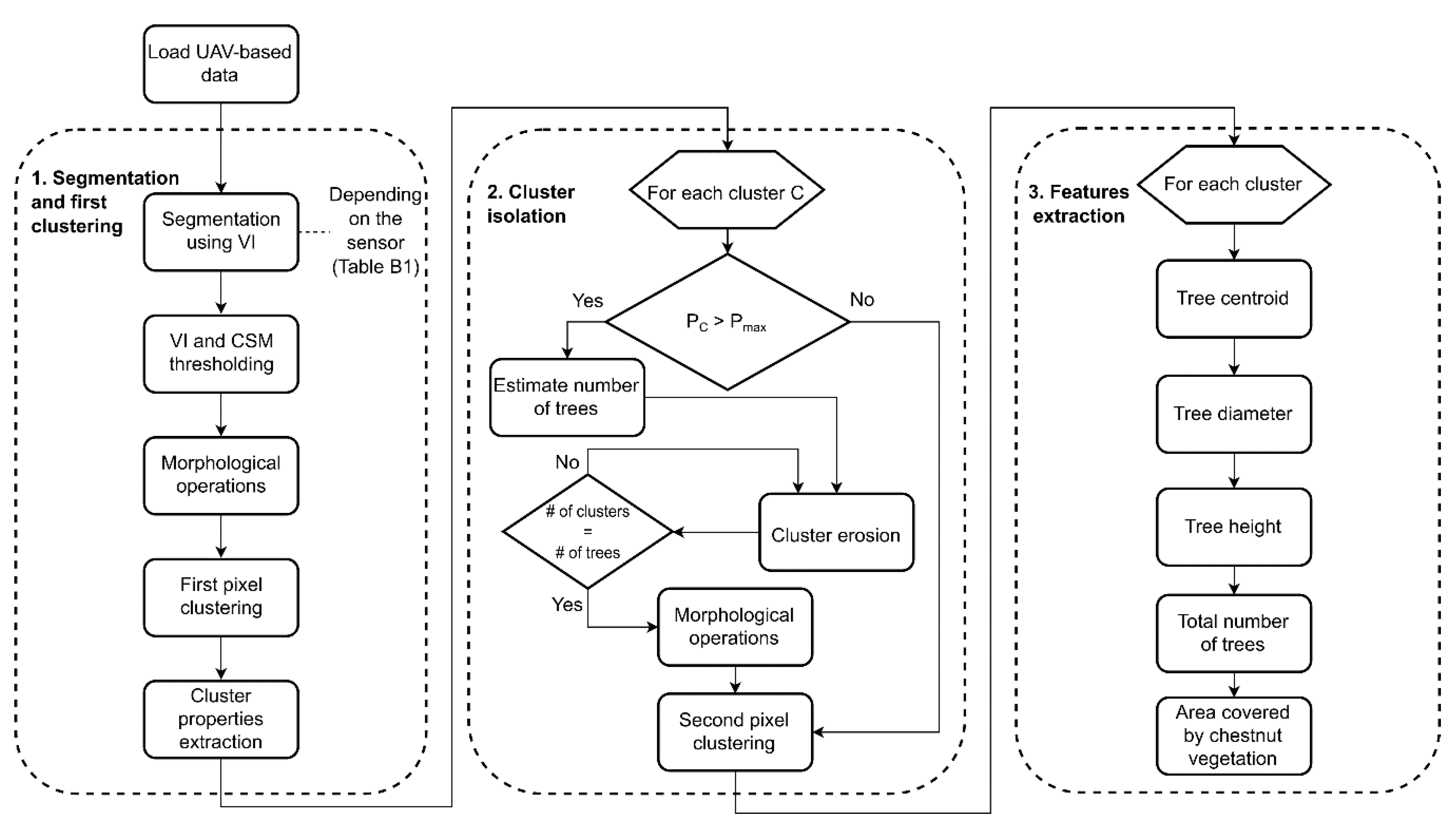
2.3. Proposed Method
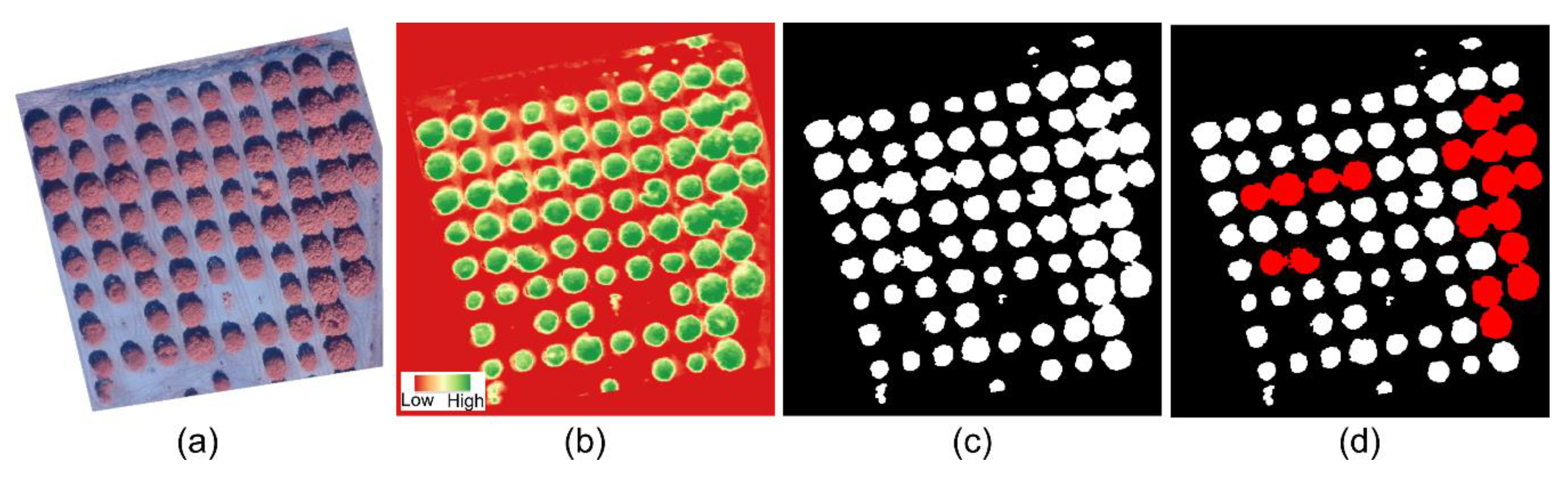
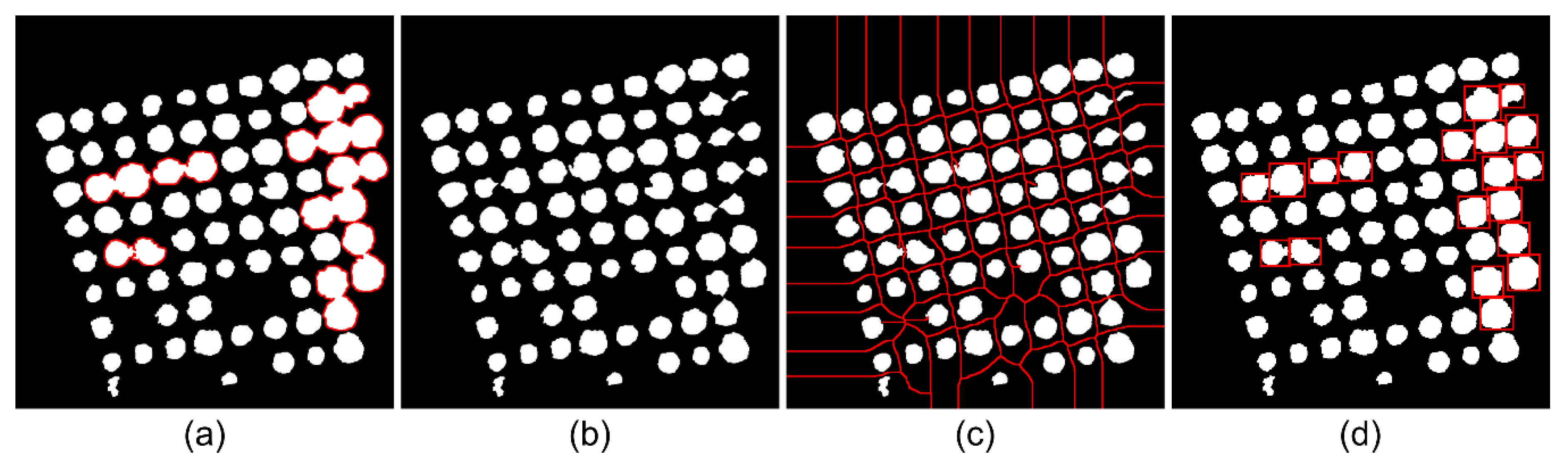
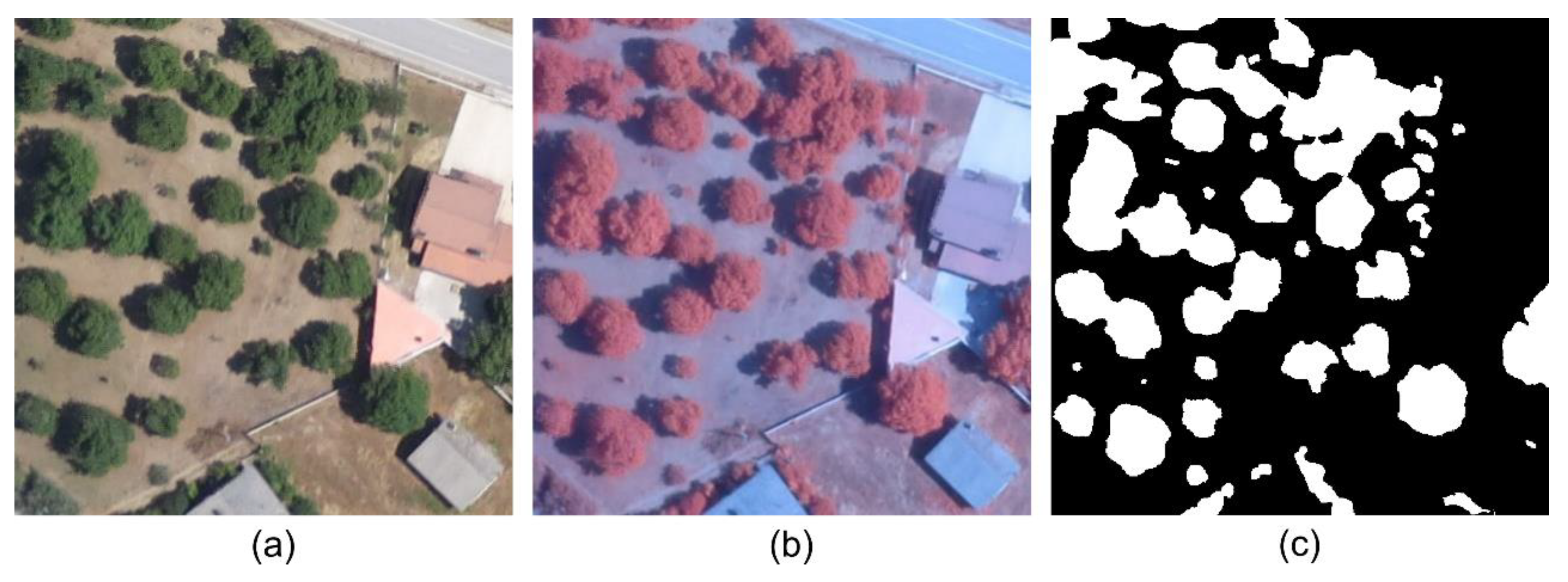
2.3.1. Segmentation and First Clustering
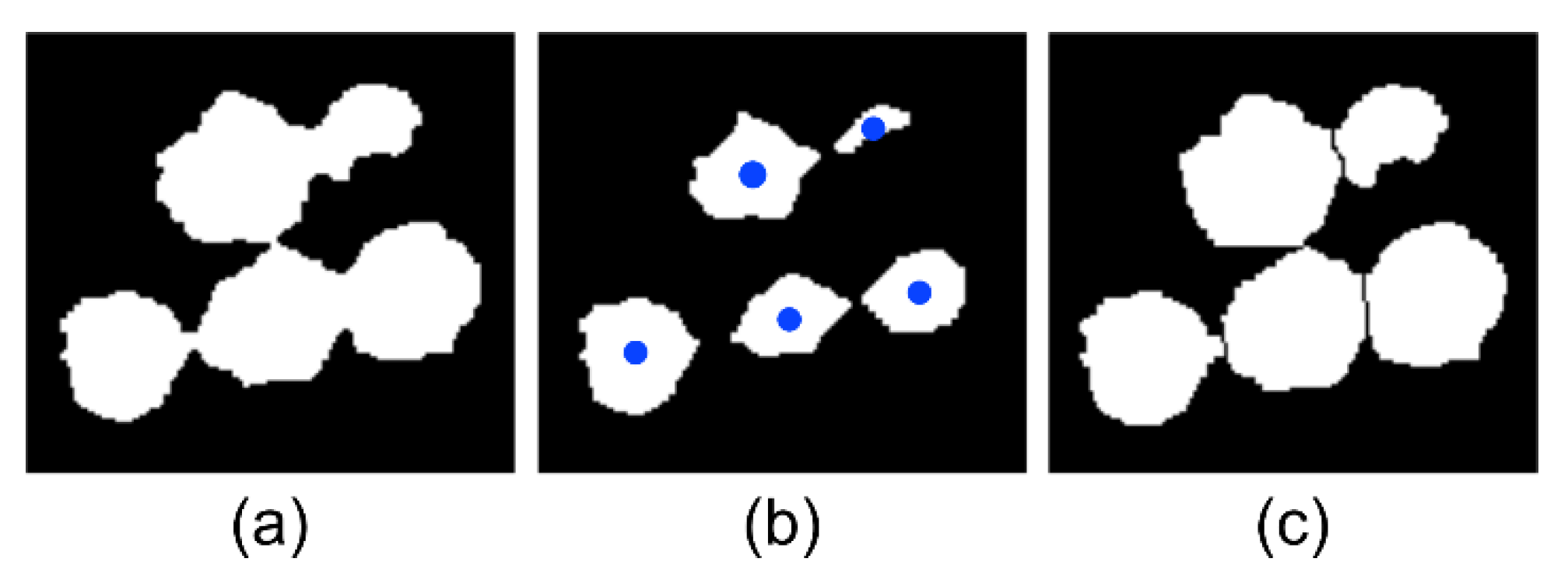
2.3.2. Cluster Isolation
2.3.3. Parameters Extraction
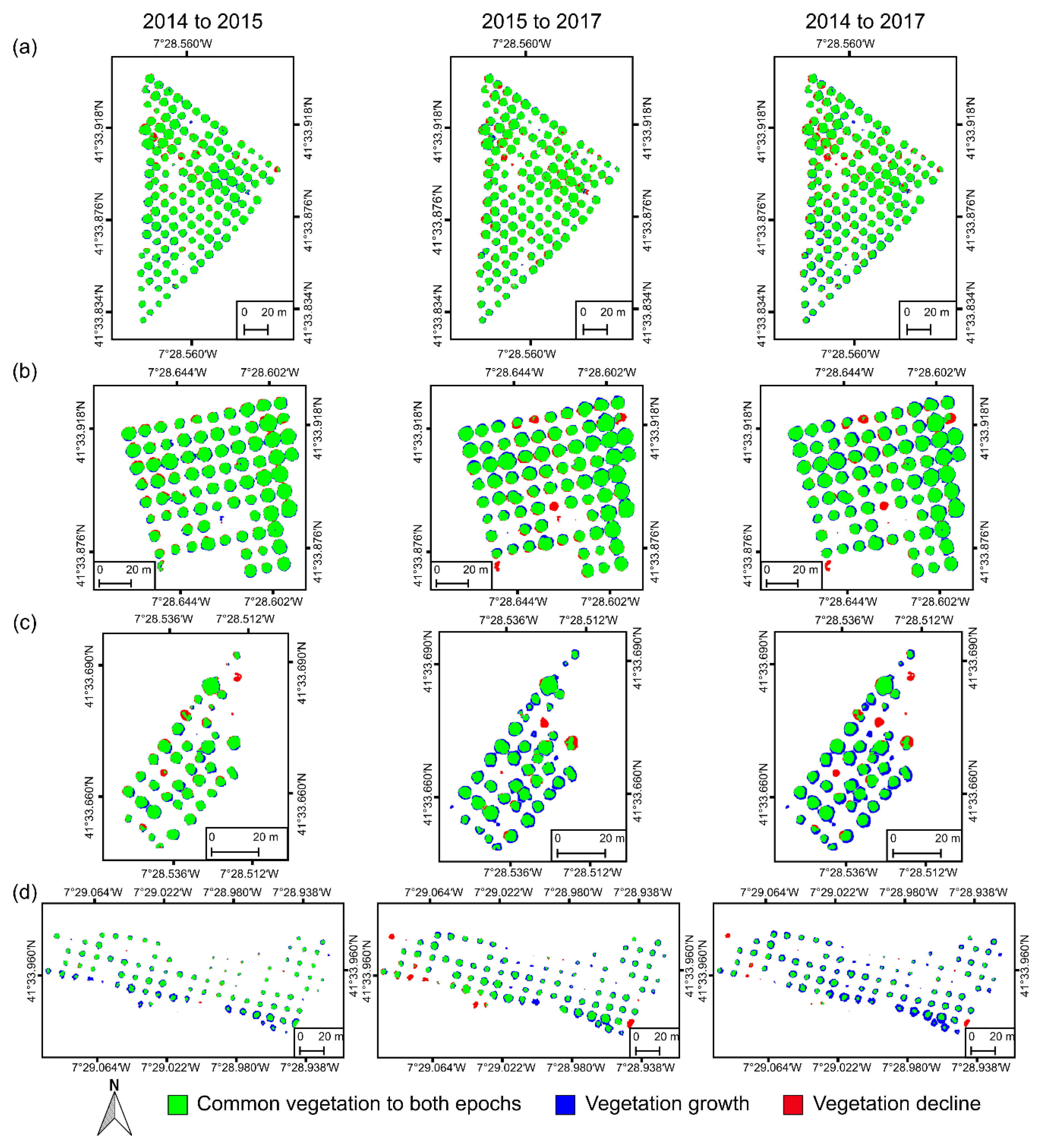
2.3.4. Multi-Temporal Analysis
2.4. Validation
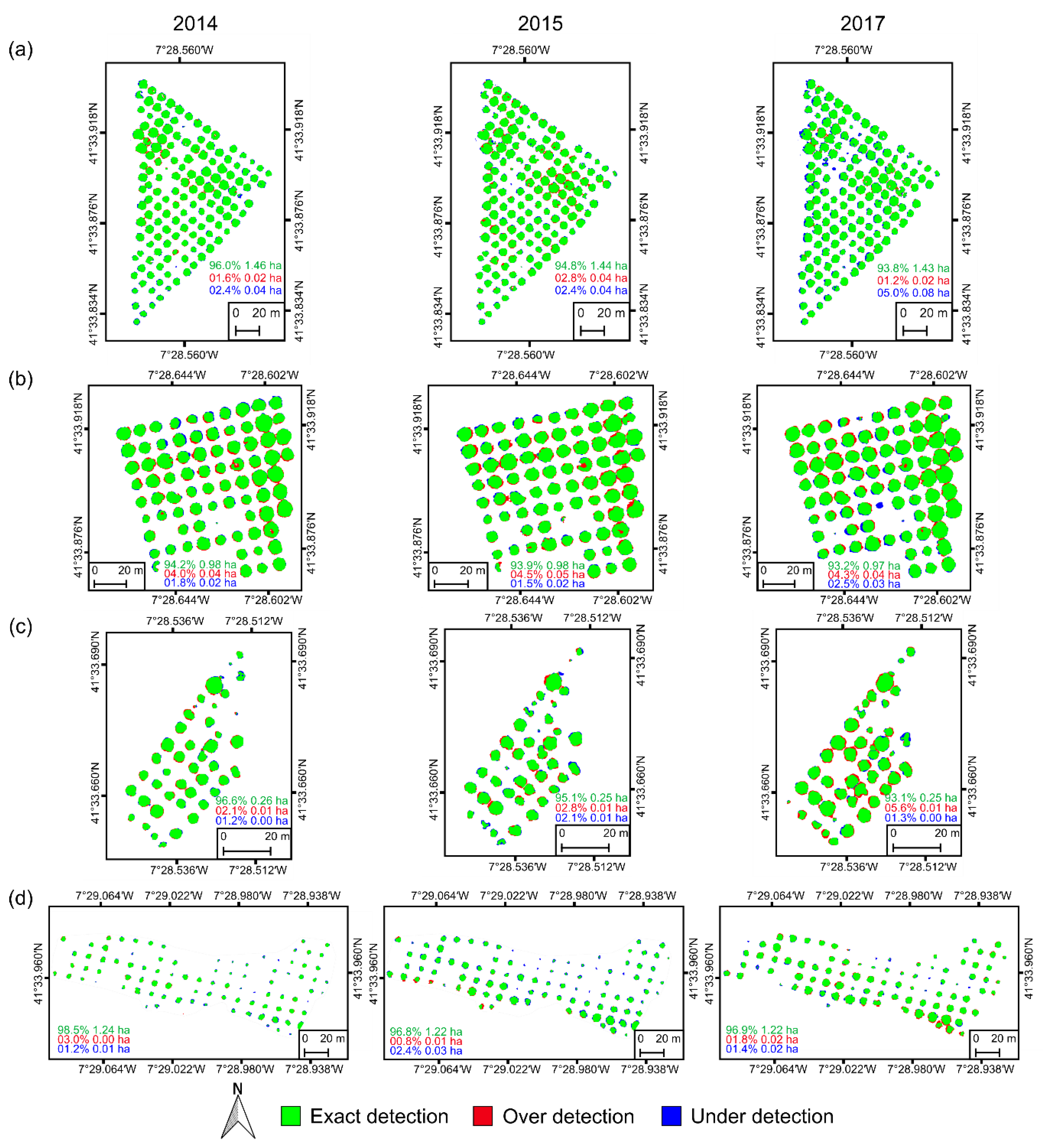
2.4.1. Vegetation Coverage Area
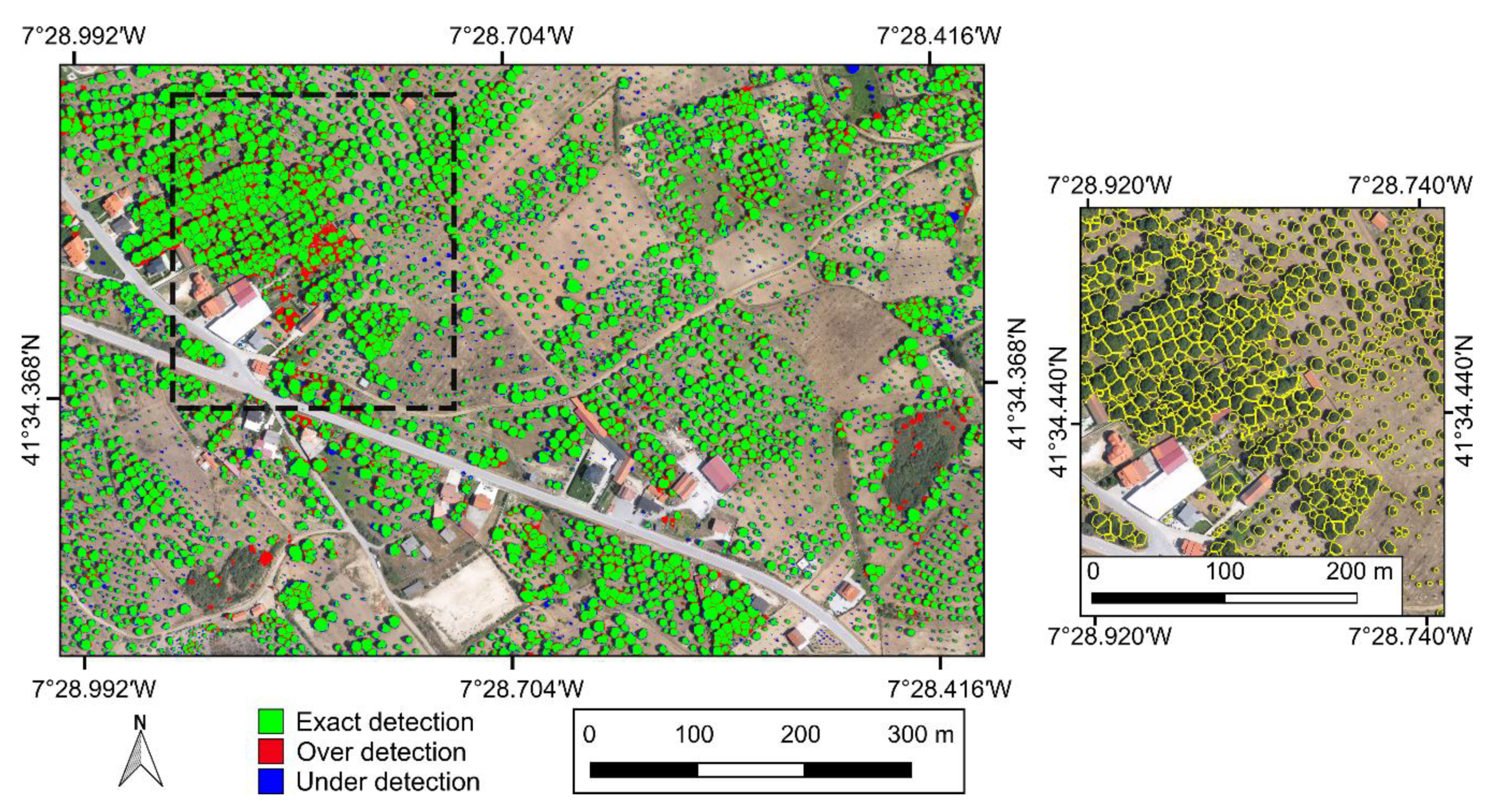
2.4.2. Number of Detected Trees
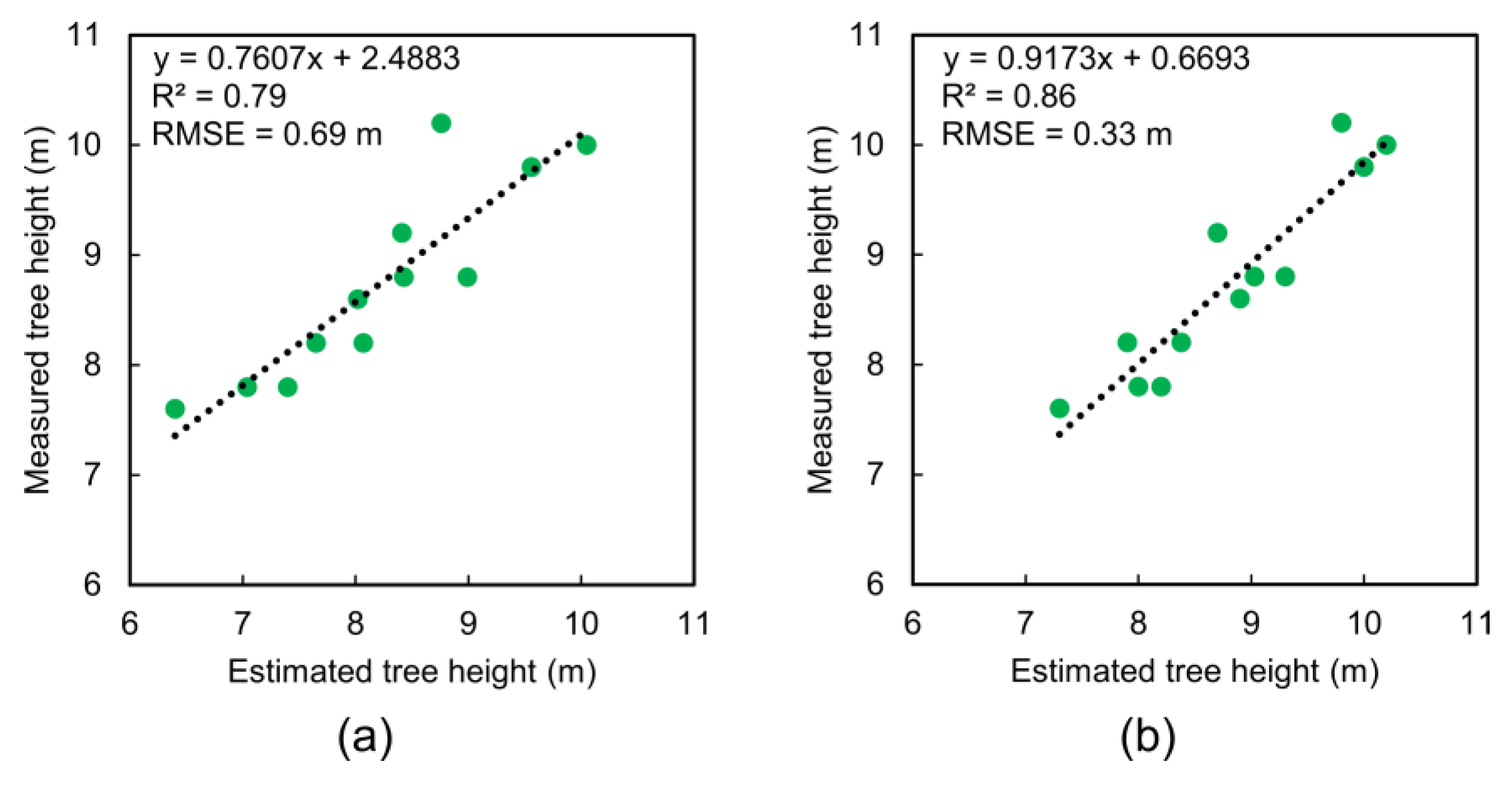
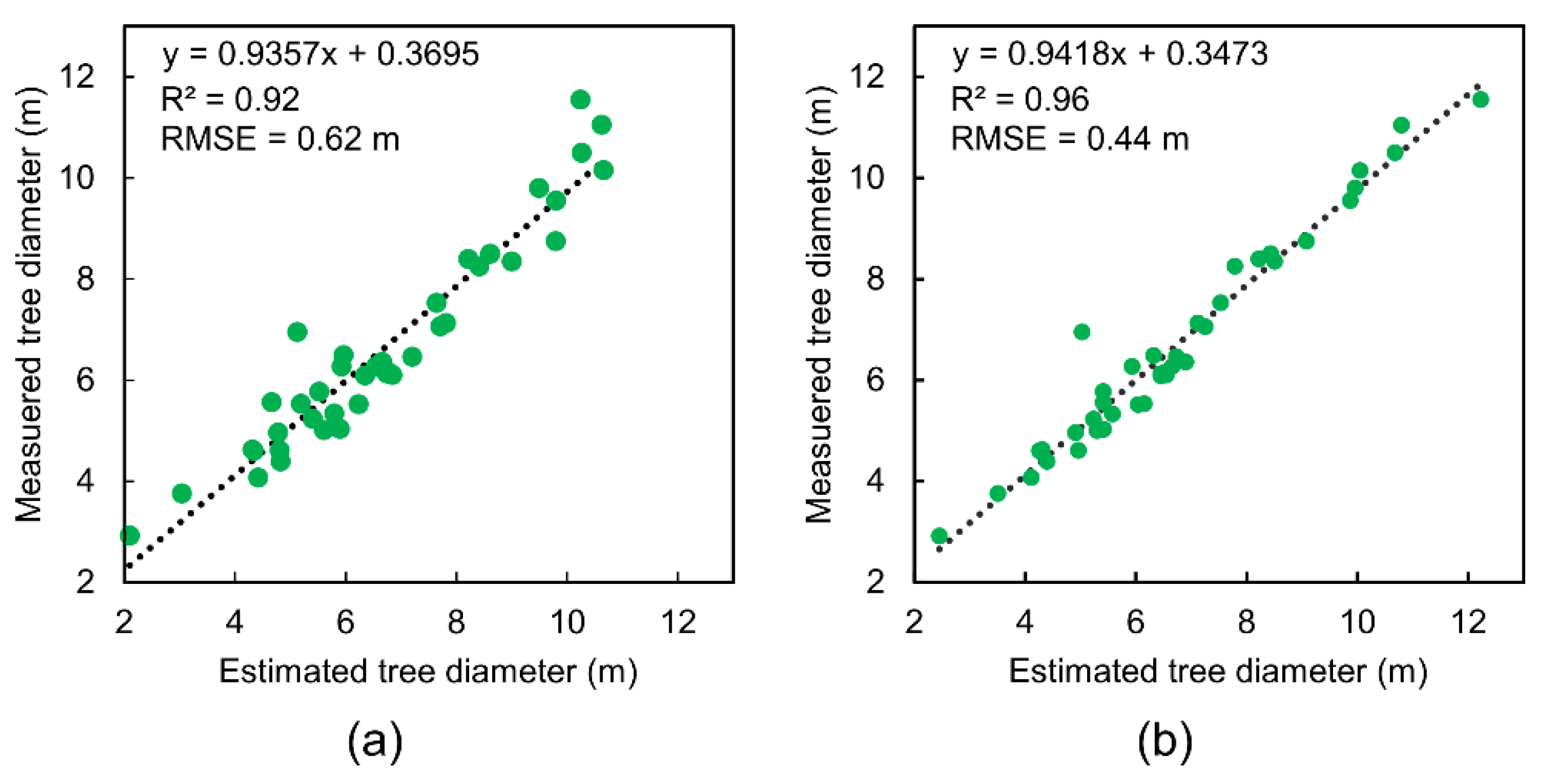
2.4.3. Tree Height and Crow Diameter Estimation
3. Results
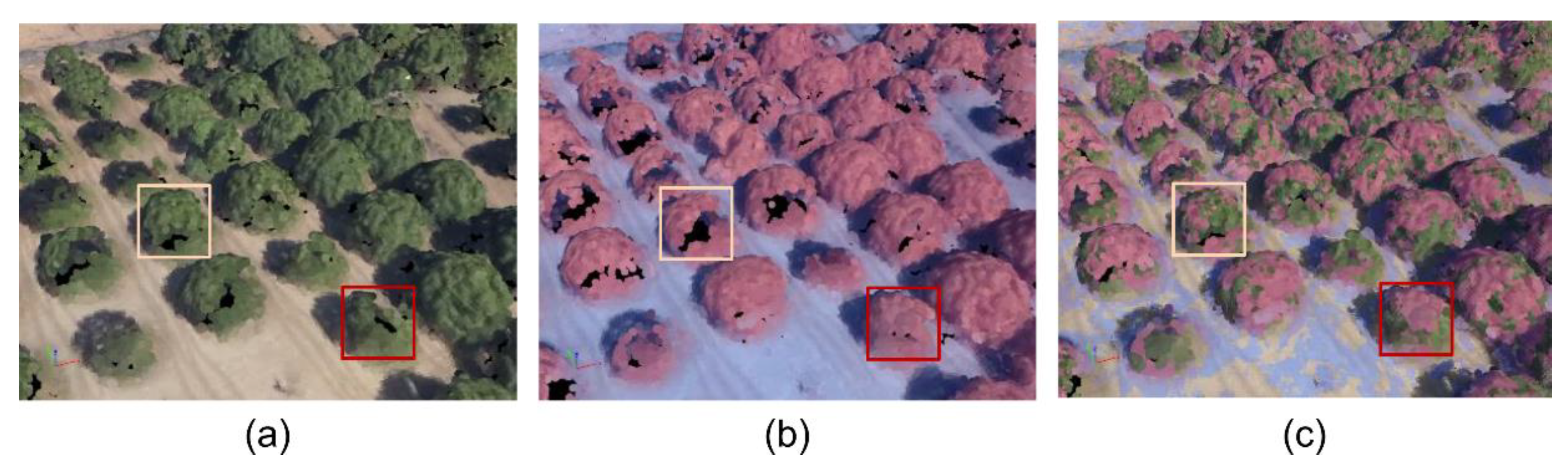
3.1. Data Alignment
3.2. Vegetation Coverage Area
3.3. Number of Detected Trees
3.4. Tree Height and Crow Diameter Estimation
3.5. Multi-Temporal Analysis
3.5.1. Plantation-Level Analysis
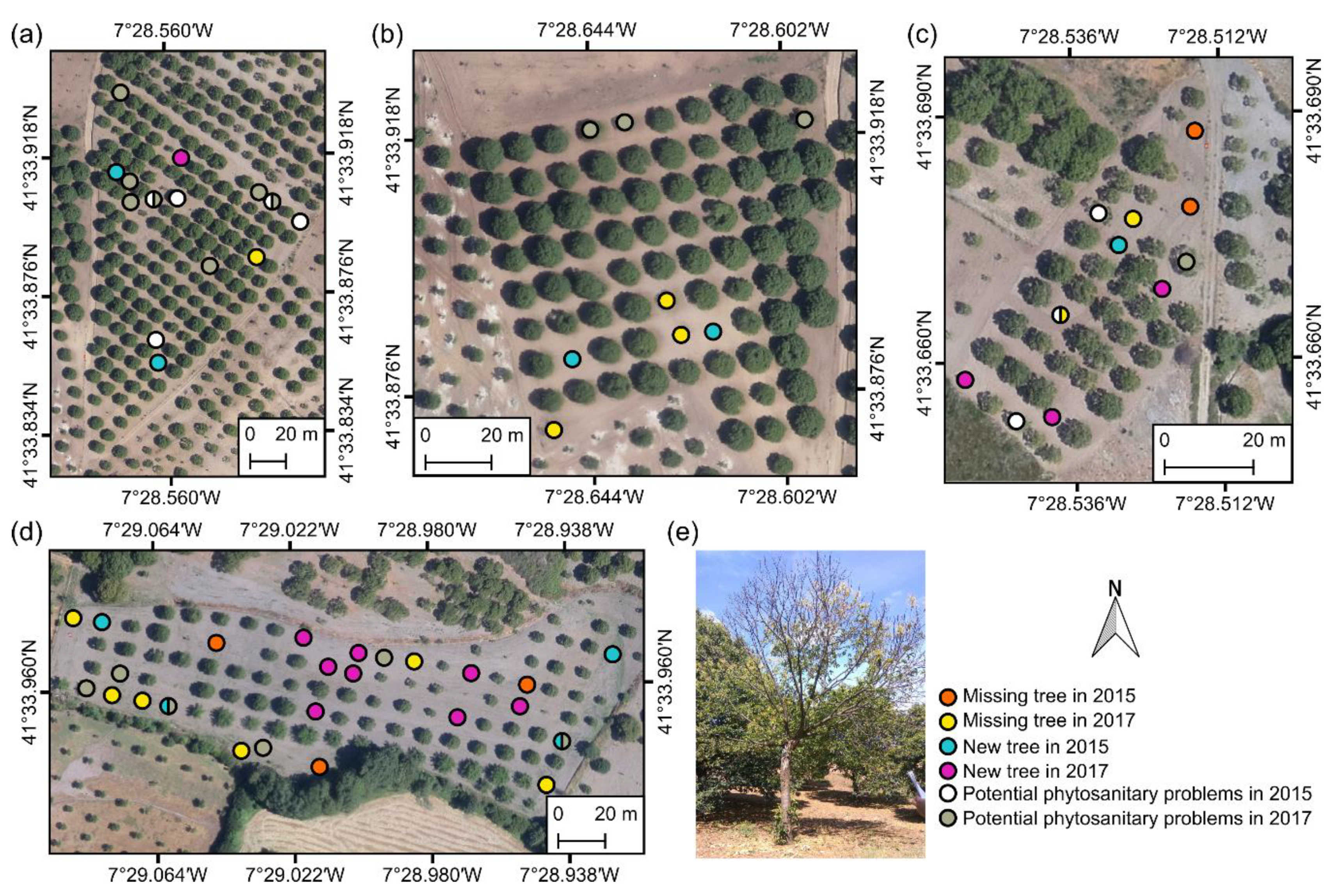
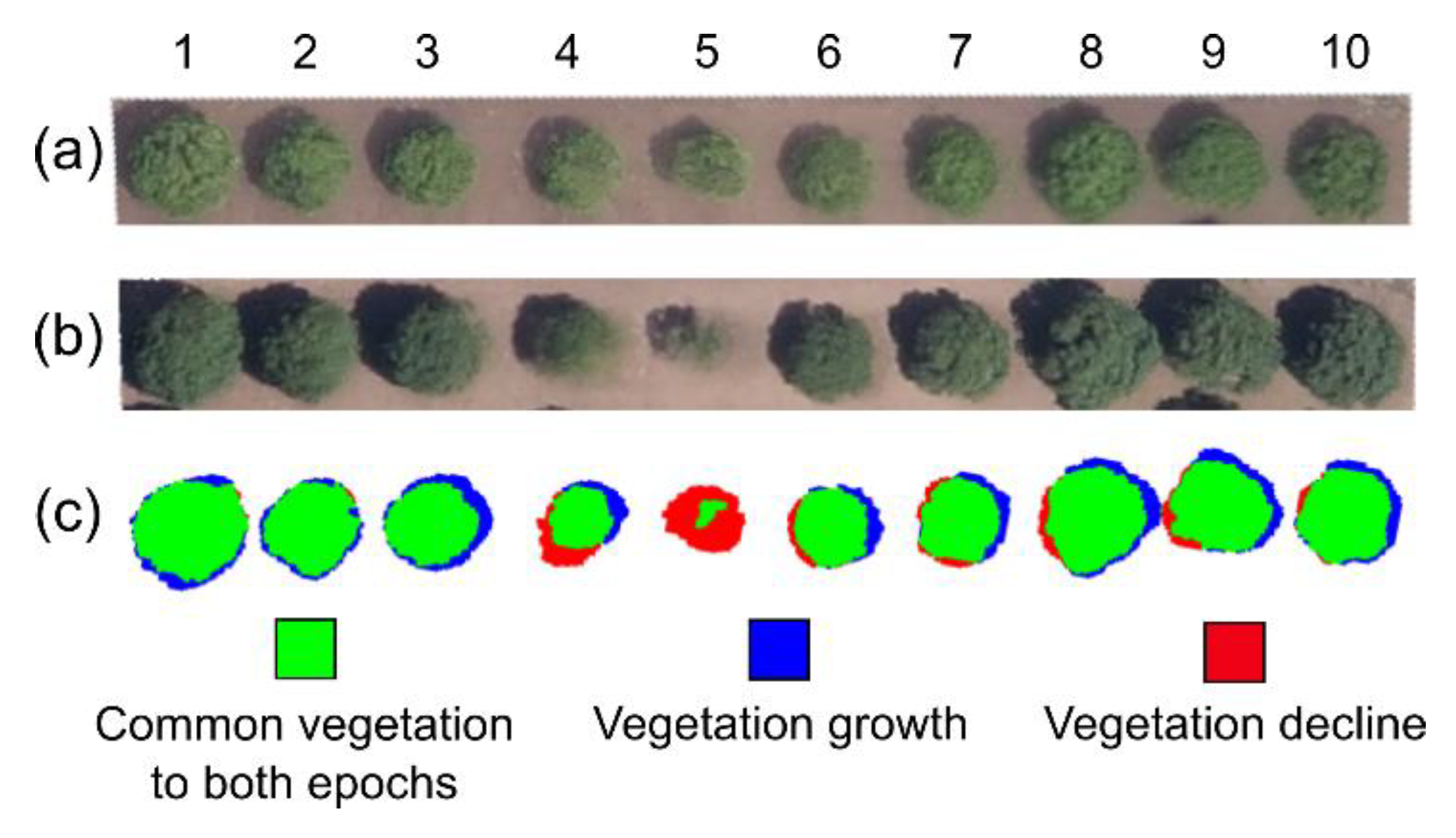
3.5.2. Tree-Level Analysis
4. Discussion
4.1. Vegetation Coverage Area
4.2. Number of Detected Trees
4.3. Tree Height and Crow Diameter Estimation
4.4. Multi-Temporal Analysis
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
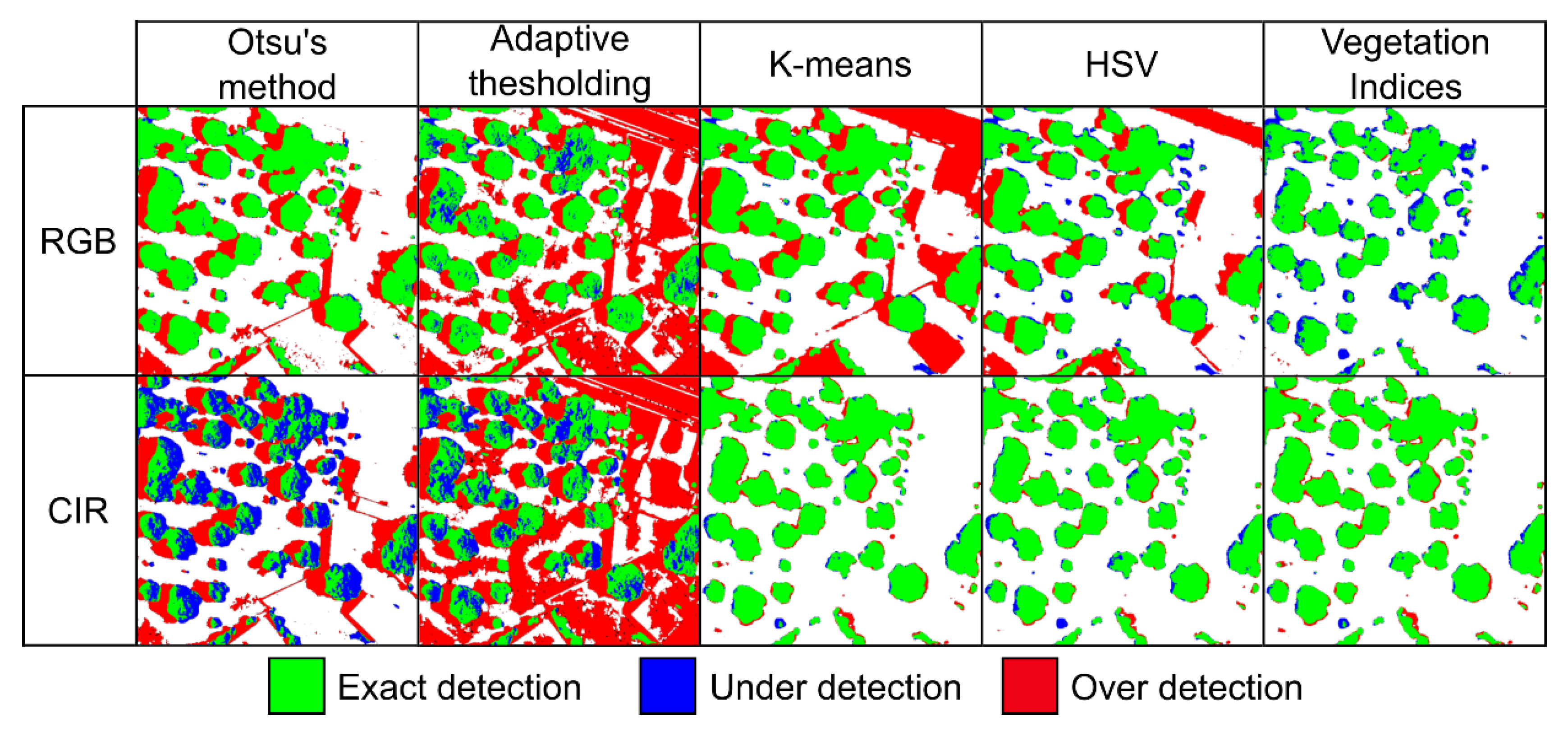
| Method | Image Type | Exact Detection (%) | Over Detection (%) | Under Detection (%) |
|---|---|---|---|---|
| Otsu | RGB | 82 | 16 | 2 |
| CIR | 65 | 18 | 17 | |
| Adaptive threshold | RGB | 59 | 38 | 3 |
| CIR | 45 | 46 | 9 | |
| K-means | RGB | 74 | 25 | 1 |
| CIR | 96 | 3 | 1 | |
| HSV | RGB | 84 | 13 | 3 |
| CIR | 96 | 2 | 2 | |
| Vegetation index | RGB | 93 | 1 | 6 |
| CIR | 96 | 3 | 1 |
Appendix B
| Vegetation Indices Requiring NIR and RGB Bands | ||
| Name | Equation | Reference |
| Blue Normalized Difference Vegetation Index | Hancock and Dougherty [48] | |
| Difference Vegetation Index | Tucker [49] | |
| Enhanced Vegetation Index | Justice et al. [50] | |
| Excess RedEdge | Proposed in this study, derived from ExG | |
| Green Difference Vegetation Index | Sripada et al. [51] | |
| Green Normalized Difference Vegetation Index | Gitelson et al. [52] | |
| Green Soil-Adjusted Vegetation Index | Sripada et al. [51] | |
| Modified Soil-Adjusted Vegetation Index | Qi et al. [53] | |
| Normalized Difference Vegetation Index | Rouse et al. [54] | |
| Optimized Soil-Adjusted Vegetation Index | Rondeaux et al. [55] | |
| Soil-Adjusted Vegetation Index | Huete [56] | |
| Vegetation Indices Requiring only RGB Bands | ||
| Name | Equation | Reference |
| Excess Green | Woebbecke et al. [57] | |
| Green-Blue Vegetation Index | Kawashima and Nakatani [58] | |
| Green-Red Vegetation Index | Tucker [49] | |
| Modified Green Red Vegetation Index | Bendig et al. [59] | |
| Red Green Blue Vegetation Index | Bendig et al. [59] | |
| Vegetation Index Green | Gitelson et al. [60] | |

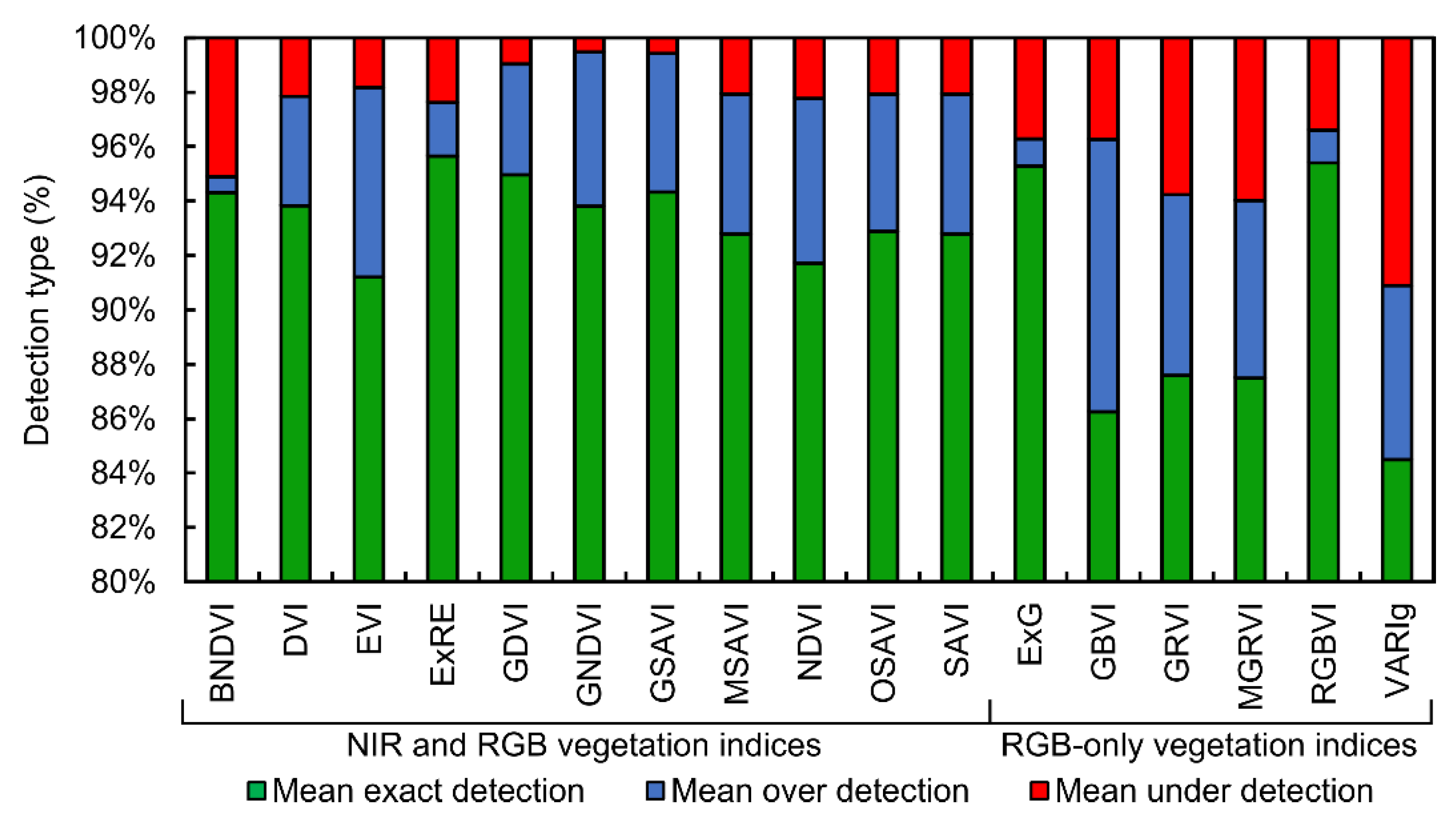
| VI | 2014 | 2015 | 2017 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Exact (%) | Over (%) | Under (%) | Exact (%) | Over (%) | Under (%) | Exact (%) | Over (%) | Under (%) | |
| Vegetation Indices Requiring NIR and RGB Bands | |||||||||
| BNDVI | 94.9% | 0.8% | 4.3% | 94.4% | 0.2% | 5.4% | 93.7% | 0.7% | 5.6% |
| DVI | 94.2% | 3.7% | 2.1% | 92.8% | 4.8% | 2.4% | 94.4% | 3.6% | 2.0% |
| EVI | 92.1% | 6.1% | 1.7% | 89.9% | 7.8% | 2.3% | 91.6% | 6.9% | 1.4% |
| ExRE | 95.8% | 2.1% | 2.1% | 95.9% | 1.3% | 2.9% | 95.3% | 2.5% | 2.2% |
| GDVI | 94.7% | 4.4% | 0.8% | 95.8% | 2.9% | 1.3% | 94.3% | 4.9% | 0.8% |
| GNDVI | 93.8% | 5.8% | 0.4% | 95.1% | 4.0% | 0.9% | 92.5% | 7.2% | 0.3% |
| GSAVI | 94.2% | 5.3% | 0.5% | 95.5% | 3.5% | 0.9% | 93.2% | 6.4% | 0.3% |
| MSAVI | 93.5% | 4.5% | 2.0% | 91.8% | 5.8% | 2.4% | 93.1% | 5.1% | 1.7% |
| NDVI | 92.6% | 5.2% | 2.2% | 90.7% | 6.6% | 2.7% | 91.8% | 6.4% | 1.8% |
| OSAVI | 93.5% | 4.4% | 2.0% | 91.9% | 5.7% | 2.4% | 93.3% | 5.0% | 1.7% |
| SAVI | 93.5% | 4.5% | 2.0% | 91.8% | 5.8% | 2.4% | 93.1% | 5.1% | 1.7% |
| Vegetation Indices Requiring only RGB Bands | |||||||||
| ExG | 95.8% | 0.9% | 3.3% | 95.2% | 1.2% | 3.5% | 94.9% | 0.9% | 4.3% |
| GBVI | 88.8% | 8.1% | 3.2% | 80.4% | 16.3% | 3.4% | 89.7% | 5.7% | 4.6% |
| GRVI | 89.5% | 5.1% | 5.4% | 85.5% | 8.6% | 5.9% | 87.7% | 6.2% | 6.0% |
| MGRVI | 89.4% | 5.1% | 5.5% | 85.4% | 8.3% | 6.3% | 87.6% | 6.2% | 6.2% |
| RGBVI | 95.9% | 1.1% | 3.0% | 95.2% | 1.4% | 3.3% | 95.1% | 1.1% | 3.9% |
| VARIg | 87.2% | 5.1% | 7.8% | 81.6% | 7.7% | 10.7% | 84.7% | 6.5% | 8.8% |
References
- Martins, L.; Castro, J.P.; Bento, R.; Sousa, J.J. Monitorização da condição fitossanitária do castanheiro por fotografia aérea obtida com aeronave não tripulada. Rev. Ciências Agrárias 2015, 38, 184–190. [Google Scholar]
- Valverde, A.; González-Tirante, M.; Medina-Sierra, M.; Rivas, R.; Santa-Regina, I.; Igual, J.M. Culturable bacterial diversity from the chestnut (Castanea sativa Mill.) phyllosphere and antagonism against the fungi causing the chestnut blight and ink diseases. AIMS Microbiol. 2017, 3, 293–314. [Google Scholar] [CrossRef]
- Vettraino, A.M.; Morel, O.; Perlerou, C.; Robin, C.; Diamandis, S.; Vannini, A. Occurrence and distribution of Phytophthora species in European chestnut stands, and their association with Ink Disease and crown decline. Eur. J. Plant Pathol. 2005, 111, 169. [Google Scholar] [CrossRef]
- Rigling, D.; Prospero, S. Cryphonectria parasitica, the causal agent of chestnut blight: Invasion history, population biology and disease control. Mol. Plant Pathol. 2018, 19, 7–20. [Google Scholar] [CrossRef]
- Battisti, A.; Benvegnù, I.; Colombari, F.; Haack, R.A. Invasion by the chestnut gall wasp in Italy causes significant yield loss in Castanea sativa nut production. Agric. For. Entomol. 2014, 16, 75–79. [Google Scholar] [CrossRef]
- Portela, E.; Roboredo, M.; Louzada, J. Assessment and Description of Magnesium Deficiencies in Chestnut Groves. J. Plant Nutr. 2003, 26, 503–523. [Google Scholar] [CrossRef]
- Martins, L.; Castro, J.P.; Gouveia, E. Biological control of chestnut blight in Portugal. Acta Hortic. 2014, 1043, 51–56. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Pádua, L.; Vanko, J.; Hruška, J.; Adão, T.; Sousa, J.J.; Peres, E.; Morais, R. UAS, sensors, and data processing in agroforestry: A review towards practical applications. Int. J. Remote Sens. 2017, 38, 2349–2391. [Google Scholar] [CrossRef]
- Järnstedt, J.; Pekkarinen, A.; Tuominen, S.; Ginzler, C.; Holopainen, M.; Viitala, R. Forest variable estimation using a high-resolution digital surface model. ISPRS J. Photogramm. Remote Sens. 2012, 74, 78–84. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Diaz-Varela, R.; Angileri, V.; Loudjani, P. Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods. Eur. J. Agron. 2014, 55, 89–99. [Google Scholar] [CrossRef] [Green Version]
- Mohan, M.; Silva, C.A.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.T.; Dia, M. Individual Tree Detection from Unmanned Aerial Vehicle (UAV) Derived Canopy Height Model in an Open Canopy Mixed Conifer Forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef]
- Zhen, Z.; Quackenbush, L.J.; Zhang, L. Trends in Automatic Individual Tree Crown Detection and Delineation—Evolution of LiDAR Data. Remote Sens. 2016, 8, 333. [Google Scholar] [CrossRef]
- Lindberg, E.; Holmgren, J. Individual Tree Crown Methods for 3D Data from Remote Sensing. Curr. For. Rep. 2017, 3, 19–31. [Google Scholar] [CrossRef] [Green Version]
- Wallace, L.; Lucieer, A.; Watson, C.S. Evaluating Tree Detection and Segmentation Routines on Very High Resolution UAV LiDAR Data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7619–7628. [Google Scholar] [CrossRef]
- Liu, T.; Im, J.; Quackenbush, L.J. A novel transferable individual tree crown delineation model based on Fishing Net Dragging and boundary classification. ISPRS J. Photogramm. Remote Sens. 2015, 110, 34–47. [Google Scholar] [CrossRef]
- Eysn, L.; Hollaus, M.; Lindberg, E.; Berger, F.; Monnet, J.-M.; Dalponte, M.; Kobal, M.; Pellegrini, M.; Lingua, E.; Mongus, D.; et al. A Benchmark of Lidar-Based Single Tree Detection Methods Using Heterogeneous Forest Data from the Alpine Space. Forests 2015, 6, 1721–1747. [Google Scholar] [CrossRef] [Green Version]
- Ok, A.O.; Ozdarici-Ok, A. 2-D delineation of individual citrus trees from UAV-based dense photogrammetric surface models. Int. J. Digit. Earth 2018, 11, 583–608. [Google Scholar] [CrossRef]
- Pádua, L.; Hruška, J.; Bessa, J.; Adão, T.; Martins, L.M.; Gonçalves, J.A.; Peres, E.; Sousa, A.M.R.; Castro, J.P.; Sousa, J.J. Multi-Temporal Analysis of Forestry and Coastal Environments Using UASs. Remote Sens. 2017, 10, 24. [Google Scholar] [CrossRef]
- Instituto Nacional de Estatística, I.P. Estatísticas Agrícolas 2016; Instituto Nacional de Estatística, I.P.: Lisbon, Portugal, 2017; ISBN 978-989-25-0395-0. [Google Scholar]
- Borges, O.; Gonçalves, B.; de Carvalho, J.L.S.; Correia, P.; Silva, A.P. Nutritional quality of chestnut (Castanea sativa Mill.) cultivars from Portugal. Food Chem. 2008, 106, 976–984. [Google Scholar] [CrossRef]
- Wang, J.; Ge, Y.; Heuvelink, G.B.M.; Zhou, C.; Brus, D. Effect of the sampling design of ground control points on the geometric correction of remotely sensed imagery. Int. J. Appl. Earth Obs. Geoinf. 2012, 18, 91–100. [Google Scholar] [CrossRef]
- Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P. Assessment of photogrammetric mapping accuracy based on variation ground control points number using unmanned aerial vehicle. Measurement 2017, 98, 221–227. [Google Scholar] [CrossRef]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man. Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Martins, L.M.; Castro, J.P.; Bento, R.; Sousa, J.J. Chestnut health monitoring by aerial photographs obtained by unnamed aerial vehicle. Rev. Ciências Agrárias 2015, 38, 184–190. [Google Scholar]
- Martins, L.; Castro, J.; Macedo, W.; Marques, C.; Abreu, C. Assessment of the spread of chestnut ink disease using remote sensing and geostatistical methods. Eur. J. Plant Pathol. 2007, 119, 159–164. [Google Scholar] [CrossRef]
- Castro, J.; Azevedo, J.C.; Martins, L. Temporal Analysis of Sweet Chestnut Decline in Northeastern Portugal Using Geostatistical Tools. Acta Hortic. 2010, 886, 405–410. [Google Scholar] [CrossRef]
- Martins, L.M.; Lufinha, M.I.; Marques, C.P.; Abreu, C.G. Small format aerial photography to assess chestnut ink disease. For. Snow Landsc. Res. 2001, 73, 357–360. [Google Scholar]
- Martins, L.; Castro, J.; Marques, C.; Abreu, C. Assessment of the Spread of Chestnut Ink Disease from 1995 to 2005 Using Aerial Photography and Geostatistical Methods. Acta Hortic. 2009, 349–354. [Google Scholar] [CrossRef]
- Martins, L.; Castro, J.P.; Macedo, F.; Marques, C.; Abreu, C. Índices espectrais em fotografia aérea de infravermelho próximo na monitorização da doença tinta do castanheiro. In Proceedings of the V Congresso Florestal Nacional, Instituto Politécnico de Viseu, Viseu, Portugal, 16–19 May 2005. [Google Scholar]
- Yin, D.; Wang, L. Individual mangrove tree measurement using UAV-based LiDAR data: Possibilities and challenges. Remote Sens. Environ. 2019, 223, 34–49. [Google Scholar] [CrossRef]
- Pádua, L.; Marques, P.; Adáo, T.; Hruška, J.; Peres, E.; Morais, R.; Sousa, A.; Sousa, J.J. UAS-based Imagery and Photogrammetric Processing for Tree Height and Crown Diameter Extraction. In Proceedings of the International Conference on Geoinformatics and Data Analysis, Prague, Czech Republic, 20–22 April 2018; ACM: New York, NY, USA, 2018; pp. 87–91. [Google Scholar]
- Surový, P.; Ribeiro, N.A.; Panagiotidis, D. Estimation of positions and heights from UAV-sensed imagery in tree plantations in agrosilvopastoral systems. Int. J. Remote Sens. 2018, 39, 4786–4800. [Google Scholar] [CrossRef] [Green Version]
- Assembleia da Républica Regulamento n.o 1093/2016, Diário da República n.o 238/2016, Série II; Imprensa Nacional Casa da Moeda: Lisbon, Portugal, 2016; pp. 36613–36622.
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P.; Chiteculo, V. Determining tree height and crown diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2017, 38, 2392–2410. [Google Scholar] [CrossRef]
- Díaz-Varela, R.A.; de la Rosa, R.; León, L.; Zarco-Tejada, P.J. High-Resolution Airborne UAV Imagery to Assess Olive Tree Crown Parameters Using 3D Photo Reconstruction: Application in Breeding Trials. Remote Sens. 2015, 7, 4213–4232. [Google Scholar] [CrossRef] [Green Version]
- Lim, Y.S.; La, P.H.; Park, J.S.; Lee, M.H.; Pyeon, M.W.; Kim, J.-I. Calculation of Tree Height and Canopy Crown from Drone Images Using Segmentation. J. Korean Soc. Surv. Geod. Photogramm. Cartogr. 2015, 33, 605–614. [Google Scholar] [CrossRef] [Green Version]
- Iizuka, K.; Yonehara, T.; Itoh, M.; Kosugi, Y. Estimating Tree Height and Diameter at Breast Height (DBH) from Digital Surface Models and Orthophotos Obtained with an Unmanned Aerial System for a Japanese Cypress (Chamaecyparis obtusa) Forest. Remote Sens. 2018, 10, 13. [Google Scholar] [CrossRef]
- Guerra-Hernández, J.; Cosenza, D.N.; Rodriguez, L.C.E.; Silva, M.; Tomé, M.; Díaz-Varela, R.A.; González-Ferreiro, E. Comparison of ALS- and UAV(SfM)-derived high-density point clouds for individual tree detection in Eucalyptus plantations. Int. J. Remote Sens. 2018, 39, 5211–5235. [Google Scholar] [CrossRef]
- Hernandez, J.G.; Gonzalez-Ferreiro, E.; Sarmento, A.; Silva, J.; Nunes, A.; Correia, A.C.; Fontes, L.; Tomé, M.; Diaz-Varela, R. Using high resolution UAV imagery to estimate tree variables in Pinus pinea plantation in Portugal. For. Syst. 2016, 25. [Google Scholar] [CrossRef]
- Popescu, S.C.; Wynne, R.H.; Nelson, R.F. Measuring individual tree crown diameter with lidar and assessing its influence on estimating forest volume and biomass. Can. J. Remote Sens. 2003, 29, 564–577. [Google Scholar] [CrossRef]
- Guerra-Hernández, J.; González-Ferreiro, E.; Monleón, V.J.; Faias, S.P.; Tomé, M.; Díaz-Varela, R.A. Use of Multi-Temporal UAV-Derived Imagery for Estimating Individual Tree Growth in Pinus pinea Stands. Forests 2017, 8, 300. [Google Scholar] [CrossRef]
- Michez, A.; Piégay, H.; Lisein, J.; Claessens, H.; Lejeune, P. Classification of riparian forest species and health condition using multi-temporal and hyperspatial imagery from unmanned aerial system. Environ. Monit. Assess. 2016, 188, 146. [Google Scholar] [CrossRef]
- Gómez-Candón, D.; Virlet, N.; Labbé, S.; Jolivot, A.; Regnard, J.-L. Field phenotyping of water stress at tree scale by UAV-sensed imagery: New insights for thermal acquisition and calibration. Precis. Agric. 2016, 17, 786–800. [Google Scholar] [CrossRef]
- Park, S.; Nolan, A.; Ryu, D.; Fuentes, S.; Hernandez, E.; Chung, H.; O’Connell, M. Estimation of crop water stress in a nectarine orchard using high-resolution imagery from unmanned aerial vehicle (UAV). In Proceedings of the 21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 November–4 December 2015; Weber, T., McPhee, M.J., Anderssen, R.S., Eds.; Modelling and Simulation Society of Australia and New Zealand: Canberra, Australia, 2015; pp. 1413–1419. [Google Scholar]
- Gago, J.; Douthe, C.; Coopman, R.E.; Gallego, P.P.; Ribas-Carbo, M.; Flexas, J.; Escalona, J.; Medrano, H. UAVs challenge to assess water stress for sustainable agriculture. Agric. Water Manag. 2015, 153, 9–19. [Google Scholar] [CrossRef]
- Matese, A.; Toscano, P.; Di Gennaro, S.F.; Genesio, L.; Vaccari, F.P.; Primicerio, J.; Belli, C.; Zaldei, A.; Bianconi, R.; Gioli, B. Intercomparison of UAV, Aircraft and Satellite Remote Sensing Platforms for Precision Viticulture. Remote Sens. 2015, 7, 2971–2990. [Google Scholar] [CrossRef] [Green Version]
- Hancock, D.W.; Dougherty, C.T. Relationships between Blue- and Red-based Vegetation Indices and Leaf Area and Yield of Alfalfa. Crop Sci. 2007, 47, 2547–2556. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Justice, C.O.; Vermote, E.; Townshend, J.R.G.; Defries, R.; Roy, D.P.; Hall, D.K.; Salomonson, V.V.; Privette, J.L.; Riggs, G.; Strahler, A.; et al. The Moderate Resolution Imaging Spectroradiometer (MODIS): Land remote sensing for global change research. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1228–1249. [Google Scholar] [CrossRef]
- Sripada, R.P.; Heiniger, R.W.; White, J.G.; Meijer, A.D. Aerial Color Infrared Photography for Determining Early In-Season Nitrogen Requirements in Corn. Agron. J. 2006, 98, 968–977. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Qi, J.; Chehbouni, A.; Huete, A.R.; Kerr, Y.H.; Sorooshian, S. A modified soil adjusted vegetation index. Remote Sens. Environ. 1994, 48, 119–126. [Google Scholar] [CrossRef]
- Rouse, J.W., Jr.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with Erts. NASA Spec. Publ. 1974, 351, 309. [Google Scholar]
- Rondeaux, G.; Steven, M.; Baret, F. Optimization of soil-adjusted vegetation indices. Remote Sens. Environ. 1996, 55, 95–107. [Google Scholar] [CrossRef]
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Woebbecke, D.M.; Meyer, G.E.; Von Bargen, K.; Mortensen, D.A. Color indices for weed identification under various soil, residue, and lighting conditions. Trans. ASAE 1995, 38, 259–269. [Google Scholar] [CrossRef]
- Kawashima, S.; Nakatani, M. An Algorithm for Estimating Chlorophyll Content in Leaves Using a Video Camera. Ann. Bot. 1998, 81, 49–54. [Google Scholar] [CrossRef] [Green Version]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Stark, R.; Rundquist, D. Novel algorithms for remote estimation of vegetation fraction. Remote Sens. Environ. 2002, 80, 76–87. [Google Scholar] [CrossRef] [Green Version]
















| Date | UAV | Sensor and Resolution | Overlap (%) (front/side) | GSD (cm) | # Images | Area Covered (ha) |
|---|---|---|---|---|---|---|
| 19 June 2014 | Sensefly eBee | RGB: Canon IXUS 12 7 HS (16.1 MP) CIR: Canon PowerShot ELPH 110 HS (16.1 MP) | 75/60 | 16.21 | 85 RGB 85 CIR | 490 |
| 08 September 2015 | 14.99 | 92 RGB 90 CIR | 436 | |||
| 10 July 2017 | 16.2 | 86 RGB 84 CIR | 517 |
| Orthophoto Mosaics Compared | N. Checkpoints | RMSE (px) | RMSE (cm) | Standard Deviation (px) | Mean of Residuals (px) | Min/max Residuals (px) |
|---|---|---|---|---|---|---|
| 2014–2015 | 20 | 0.61 | 9.94 | 0.25 | 0.06 | −0.93/1.28 |
| 2014–2017 | 0.90 | 14.44 | 0.38 | 0.10 | −1.12/1.82 | |
| 2015–2017 | 0.71 | 11.38 | 0.32 | −0.04 | −1.36/1.03 |
| Area/Plantation | TP (m2) | FP (m2) | FN (m2) | TN (m2) | UA (%) | PA (%) | OA (%) |
|---|---|---|---|---|---|---|---|
| Complex area | 107610 | 14698 | 12687 | 346582 | 89.45 | 87.98 | 94.31 |
| P114 | 4951 | 246 | 365 | 9630 | 93.13 | 95.27 | 95.97 |
| P115 | 5096 | 425 | 366 | 9305 | 93.30 | 92.30 | 94.79 |
| P117 | 5248 | 187 | 752 | 9004 | 87.47 | 96.55 | 93.82 |
| P214 | 3460 | 415 | 186 | 6355 | 94.91 | 89.28 | 94.23 |
| P215 | 3632 | 471 | 161 | 6152 | 95.77 | 88.51 | 93.93 |
| P217 | 3929 | 446 | 262 | 5780 | 93.75 | 89.80 | 93.20 |
| P314 | 554 | 57 | 33 | 2033 | 94.42 | 90.62 | 96.64 |
| P315 | 569 | 75 | 55 | 1977 | 91.20 | 88.31 | 95.13 |
| P317 | 719 | 149 | 36 | 1773 | 95.25 | 82.84 | 93.09 |
| P414 | 780 | 44 | 147 | 11645 | 84.15 | 94.66 | 98.49 |
| P415 | 1216 | 99 | 299 | 11002 | 80.28 | 92.45 | 96.85 |
| P417 | 1648 | 223 | 174 | 10572 | 90.46 | 88.09 | 96.86 |
| Mean of P | 2650 | 236 | 236 | 7102 | 91.17 | 90.72 | 95.25 |
| Plantation | Number of Trees | Estimated Trees (Variation) | Detection Type (%) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Good | Missed | Extra | Over | Under | Larger | Smaller | |||
| P114 | 146 | 145 (−1) | 97.93 | 0.69 | - | - | - | 0.69 | 1.38 |
| P115 | 146 | 147 (+1) | 98.64 | 0.68 | - | 0.68 | - | 0.68 | - |
| P117 | 148 | 147 (−1) | 97.96 | 1.36 | - | 0.68 | - | - | 1.36 |
| P214 | 80 | 80 (0) | 100.00 | - | - | - | - | - | - |
| P215 | 80 | 80 (0) | 97.50 | - | - | - | - | 2.50 | - |
| P217 | 80 | 79 (−1) | 93.67 | 1.27 | - | - | - | 1.27 | 5.06 |
| P314 | 44 | 43 (−1) | 93.02 | - | - | - | 2.33 | - | 4.65 |
| P315 | 43 | 42 (−1) | 85.71 | - | - | - | 2.38 | 4.76 | 7.14 |
| P317 | 44 | 44 (0) | 86.36 | - | - | 2.27 | 2.27 | 6.82 | 2.27 |
| P414 | 91 | 88 (−3) | 89.77 | 3.41 | - | - | - | - | 10.23 |
| P415 | 97 | 89 (−8) | 91.01 | 8.99 | - | - | - | 3.37 | 5.62 |
| P417 | 93 | 90 (−3) | 92.22 | 3.33 | - | - | - | 2.22 | 5.56 |
| Mean detection (%) | 93.65 | 1.64 | - | 0.30 | 0.58 | 1.86 | 3.61 | ||
| Plantation | Chestnut Area (m2) | Chestnut CA (%) | Mean Tree Height (m) | Mean Tree Diameter (m) | Mean Tree Area (m2) |
|---|---|---|---|---|---|
| P114 | 5197 | 34.2 | 6.2 | 7.0 | 36 |
| P115 | 5521 | 36.3 | 6.0 | 7.2 | 38 |
| P117 | 5436 | 35.8 | 6.7 | 7.4 | 37 |
| P214 | 3876 | 37.2 | 6.6 | 8.1 | 48 |
| P215 | 4104 | 39.4 | 6.7 | 8.5 | 51 |
| P217 | 4375 | 42.0 | 7.1 | 8.6 | 55 |
| P314 | 611 | 22.8 | 3.2 | 4.4 | 14 |
| P315 | 645 | 24.1 | 3.9 | 4.7 | 15 |
| P317 | 868 | 32.4 | 4.2 | 5.3 | 20 |
| P414 | 824 | 6.5 | 4.1 | 3.6 | 9 |
| P415 | 1315 | 10.4 | 4.6 | 4.5 | 15 |
| P417 | 1870 | 14.8 | 5.2 | 5.3 | 21 |
| 2014 | 2015 | 2017 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| ID | CA (m2) | D (m) | H (m) | CA (m2) | D (m) | H (m) | CA (m2) | D (m) | H (m) |
| 1 | 65.7 | 10.1 | 7.2 | 63.9 | 9.5 | 7.4 | 73.1 | 10.2 | 8.1 |
| 2 | 51.8 | 8.9 | 7.2 | 47.1 | 8.2 | 6.6 | 55.4 | 9.1 | 6.4 |
| 3 | 45.4 | 8.4 | 6.4 | 43.3 | 8.1 | 6.8 | 59.1 | 9.3 | 7.1 |
| 4 | 35.2 | 7.7 | 5.6 | 34.7 | 7.2 | 5.5 | 33.7 | 7.1 | 4.0 |
| 5 | 33.7 | 7.4 | 5.6 | 24.7 | 6.4 | 5.5 | 9.2 | 4.8 | 4.8 |
| 6 | 39.2 | 7.3 | 6.3 | 37.2 | 7.2 | 6.0 | 45.5 | 7.9 | 6.8 |
| 7 | 44.3 | 7.8 | 7.0 | 43.0 | 7.9 | 6.8 | 48.7 | 8.2 | 7.2 |
| 8 | 61.9 | 9.5 | 8.2 | 64.5 | 9.8 | 8.4 | 72.1 | 10.1 | 8.4 |
| 9 | 54.9 | 9.2 | 7.4 | 55.4 | 9.5 | 7.5 | 63.7 | 9.5 | 8.1 |
| 10 | 52.1 | 8.3 | 6.7 | 54.1 | 8.9 | 6.9 | 62.5 | 9.2 | 7.7 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marques, P.; Pádua, L.; Adão, T.; Hruška, J.; Peres, E.; Sousa, A.; Sousa, J.J. UAV-Based Automatic Detection and Monitoring of Chestnut Trees. Remote Sens. 2019, 11, 855. https://doi.org/10.3390/rs11070855
Marques P, Pádua L, Adão T, Hruška J, Peres E, Sousa A, Sousa JJ. UAV-Based Automatic Detection and Monitoring of Chestnut Trees. Remote Sensing. 2019; 11(7):855. https://doi.org/10.3390/rs11070855
Chicago/Turabian StyleMarques, Pedro, Luís Pádua, Telmo Adão, Jonáš Hruška, Emanuel Peres, António Sousa, and Joaquim J. Sousa. 2019. "UAV-Based Automatic Detection and Monitoring of Chestnut Trees" Remote Sensing 11, no. 7: 855. https://doi.org/10.3390/rs11070855
APA StyleMarques, P., Pádua, L., Adão, T., Hruška, J., Peres, E., Sousa, A., & Sousa, J. J. (2019). UAV-Based Automatic Detection and Monitoring of Chestnut Trees. Remote Sensing, 11(7), 855. https://doi.org/10.3390/rs11070855