A Collaborative Change Detection Approach on Multi-Sensor Spatial Imagery for Desert Wetland Monitoring after a Flash Flood in Southern Morocco

 ,
,  ,
,  and
and
Abstract
:
1. Introduction
2. Material and Methods
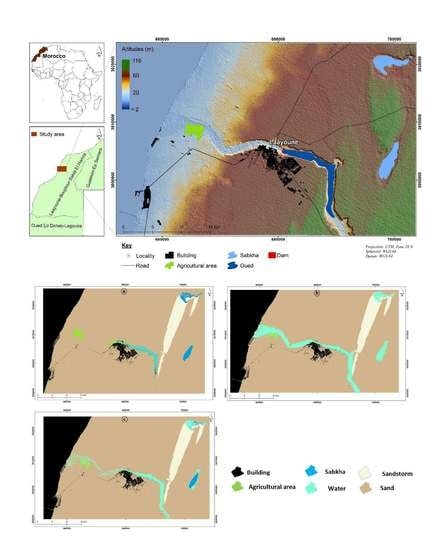
2.1. Study Area
2.2. Materials
2.3. Dataset and Preprocessing
- Three Sentinel-2 MSI images, one before and two after the flash-flood event, were used for extracting spectral indices
- Two Landsat-8 OLI images (path 205, row 41), one before and one after the flash-flood event, were used for extracting spectral indices
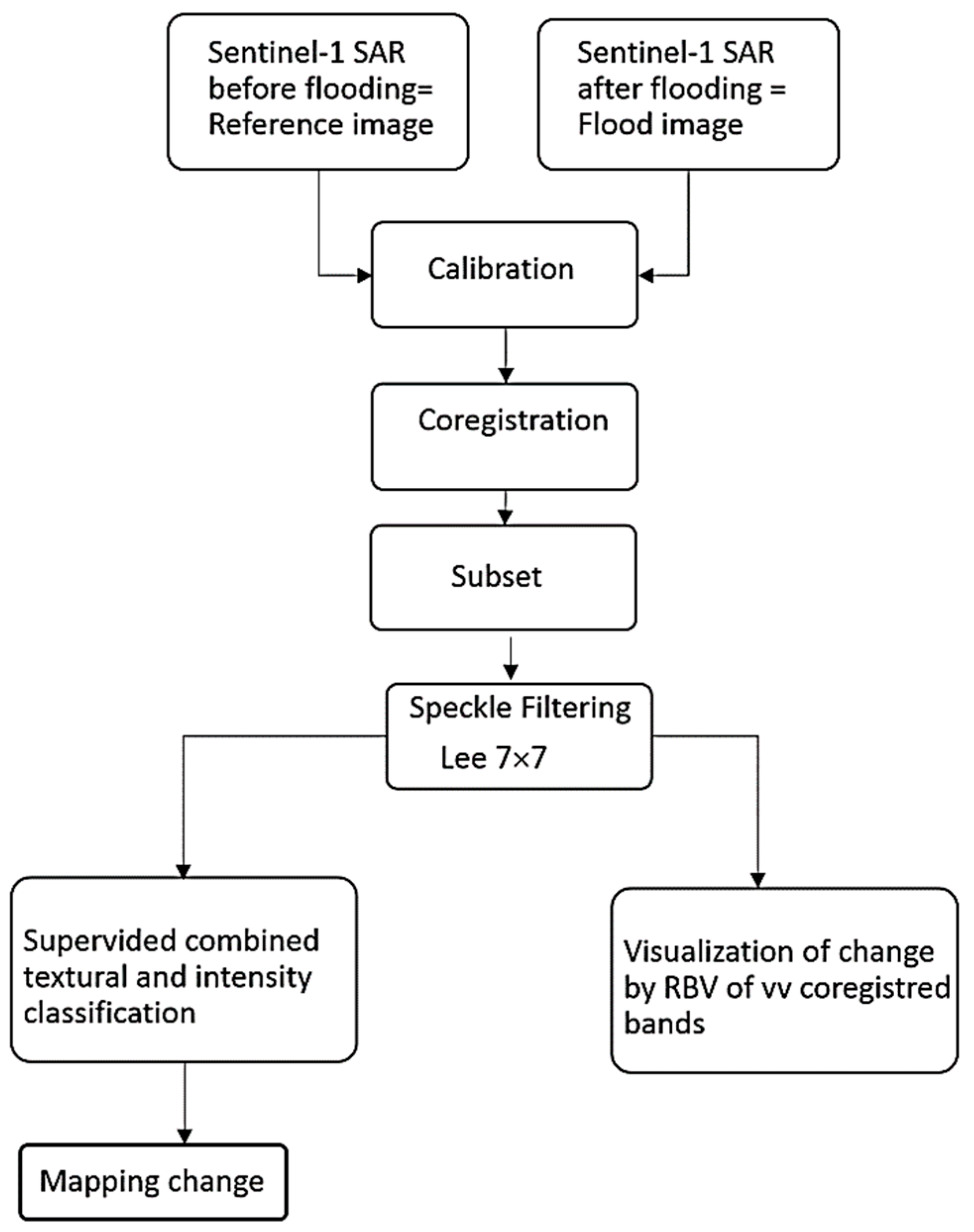
- Two Sentinel-1 (S1) SAR images, one before and one after the flash-flood event, were utilized for co-registration and classification to extract the flooding area
- = TOA reflectance,
- Mρ = Reflectance multiplicative scaling factor for the band (obtained from the metadata file),
- Aρ = Reflectance additive scaling factor for the band (obtained from the metadata file),
- Qcal = Level 1-pixel value in digital number (DN),
- θ = Solar Elevation Angle (from the metadata file).
- Qcal = L1C pixel value in DN,
- QUANTIFICATION_VALUE is provided in the metadata file.
- DN1i = ub>1i = Pixel value from date 1*,
- DN2i = Pixel value from date 2**,
- σ1i = Standard deviation (SD) of PIF from date 1*,
- σ2i = Standard deviation (SD) of PIF from date 2**,
- μ1i = Mean of PIF from date 1*,
- μ2i = Mean of PIF from date 2**,
- i = Band number (2,3,4,5,6,7) for OLI and (2,3,4,8A,11,12) for MSI,
- 1* = Mean of OLI and MSI before flood event (reference image),
- 2** = After flood image.
2.4. Methodology
2.4.1. Multispectral Data Methodology
Spectral Processing and Indices’ Feature Space Choice
Categorical Processing with SVM
- -
- Define the hyperplane as a solution to an optimization problem that separates the different classes of data under constraints whose objective function is expressed using scalar products between vectors and in which the number of “active” constraints or points lying on the boundaries are called support vectors; the middle of the margin is the optimal separating hyperplane that controls the complexity of the model.
- -
- The selection of the kernel is the most important task in the implementation and the success of the SVM classifier [47,48]. A kernel function is introduced into the scalar product to search for nonlinear separating surfaces implicitly, and the nonlinear transformation of data to a larger feature space is induced. An optimum hyperplane is determined using training data points or the support vector of each class on the hyperplane to be maximized, and its generalization ability is verified using a validation data point. Training vectors, xi, are projected into a higher-dimensional space by the kernel function. The SVM can work with a few training data points; such is the case in this study, with classes having less than 45 samples. The kernel function used in this experiment is a radial basis function (RBF)—defined by Equation (15)—for two input vectors, xi and xj, with the maximal margin γ parameter, which is user-defined. The choice of RBF kernel is justified by the frequent use of this method in the literature in the field of image classification and in change detection studies [45,46]. This kernel requires only one parameter to be pre-defined, which makes it easy to implement in contrast to other kernels.
2.4.2. SAR Radar Data Methodology
3. Results and Discussion
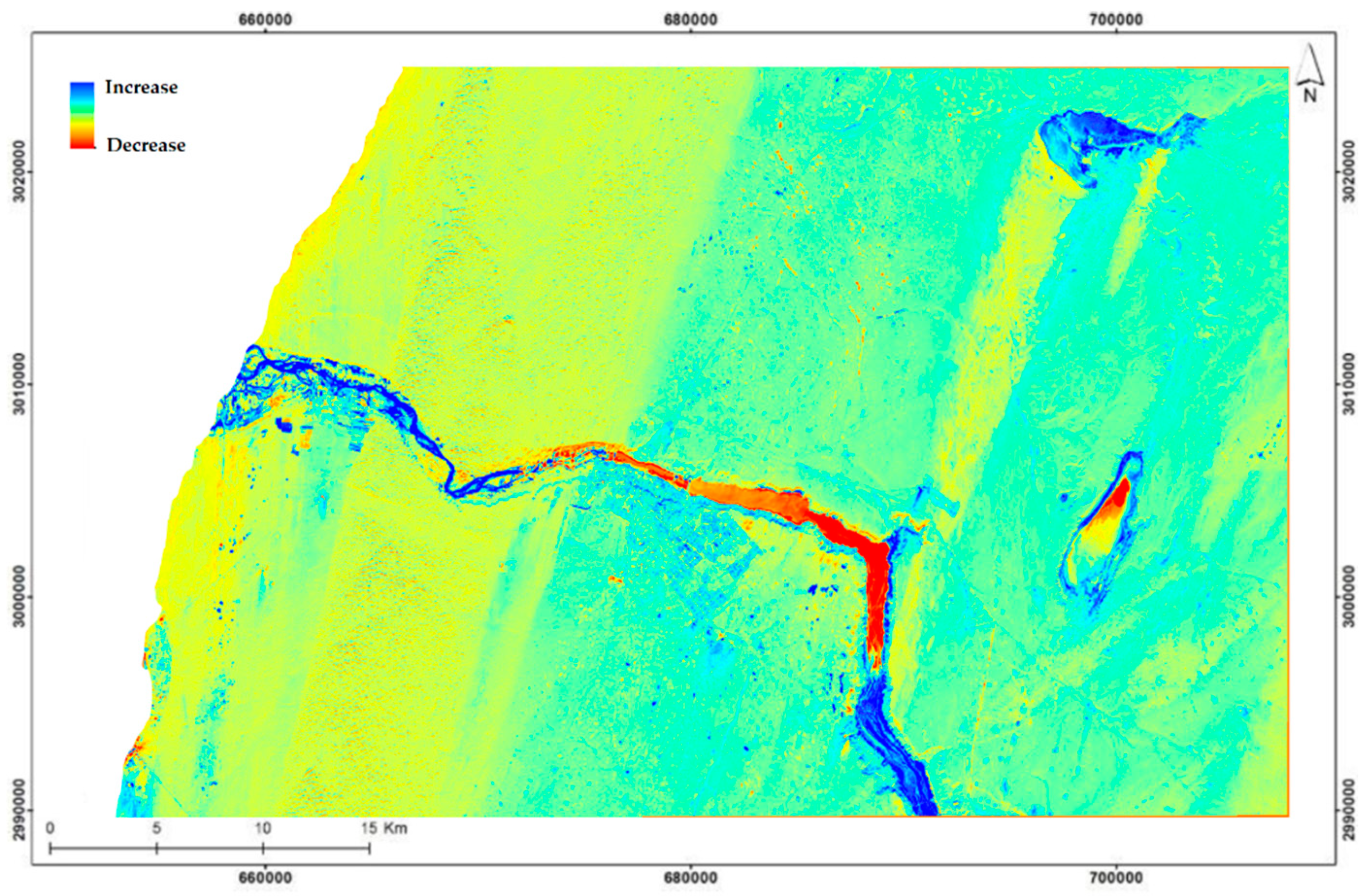
3.1. Change Mapping Obtained from Optical Data
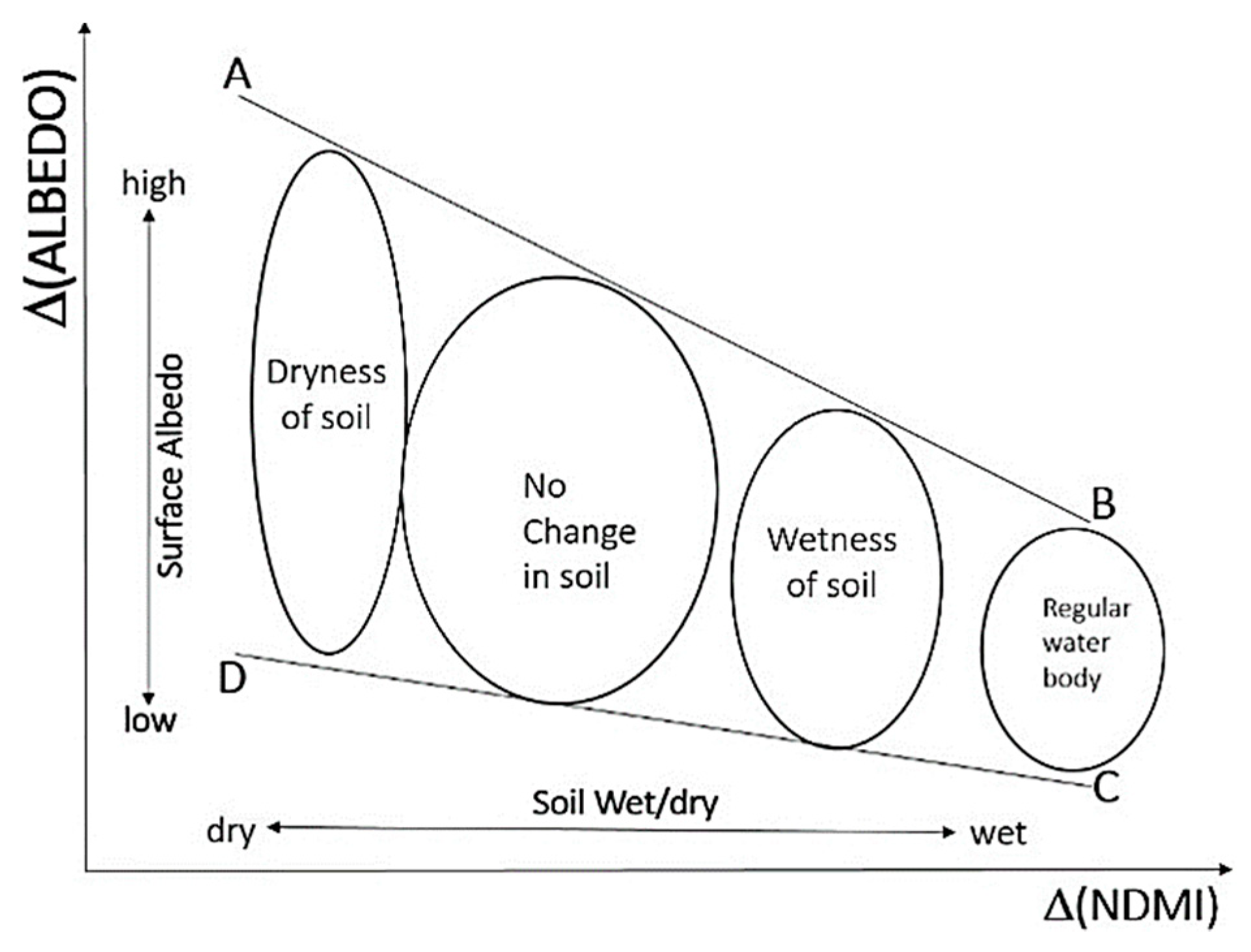
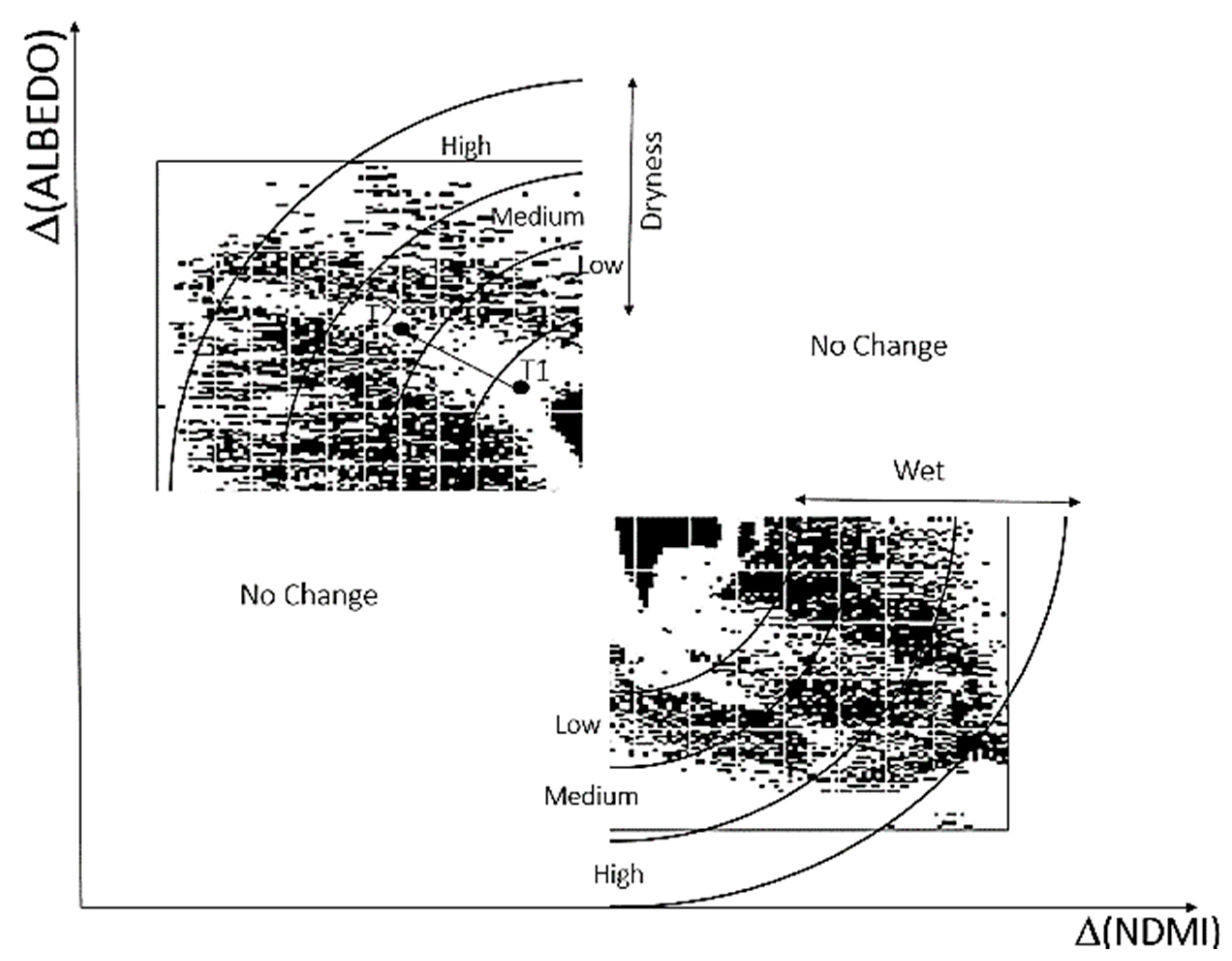
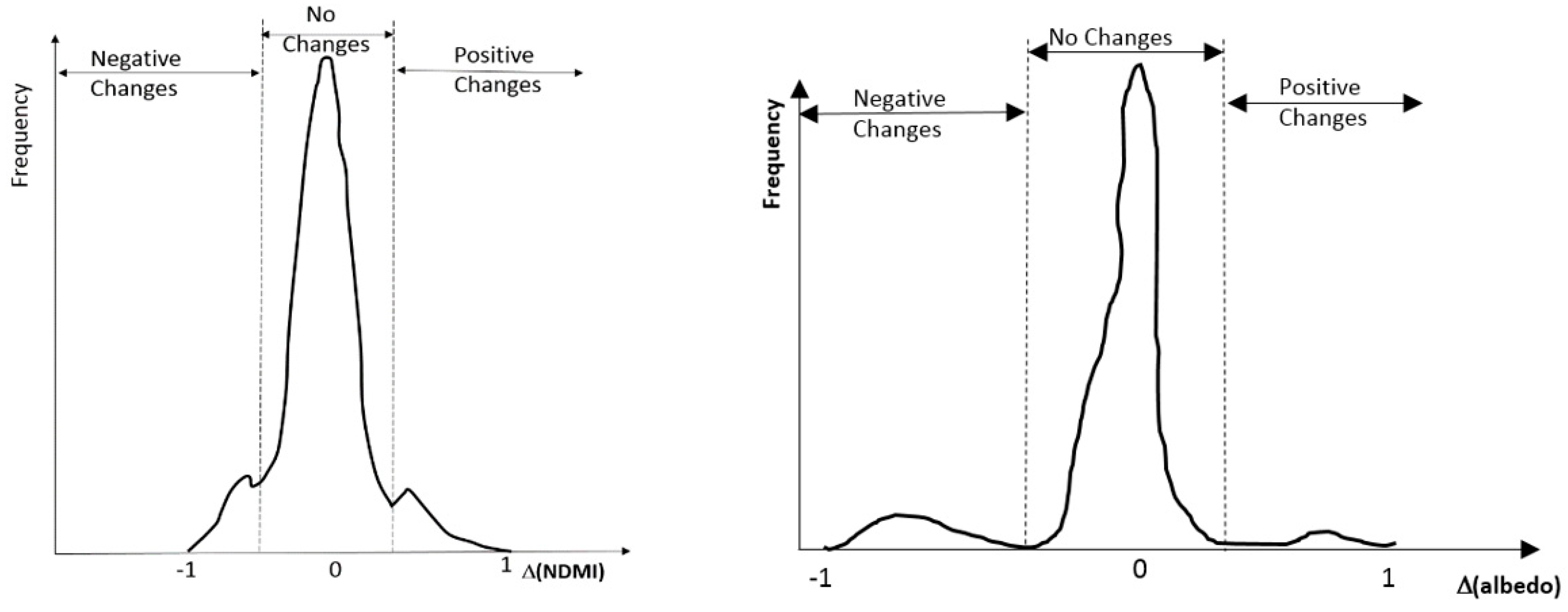
3.1.1. Characterization of Changed Areas Caused by Flash Floods Using Δ (Albedo) and Δ (NDMI) Change Indices
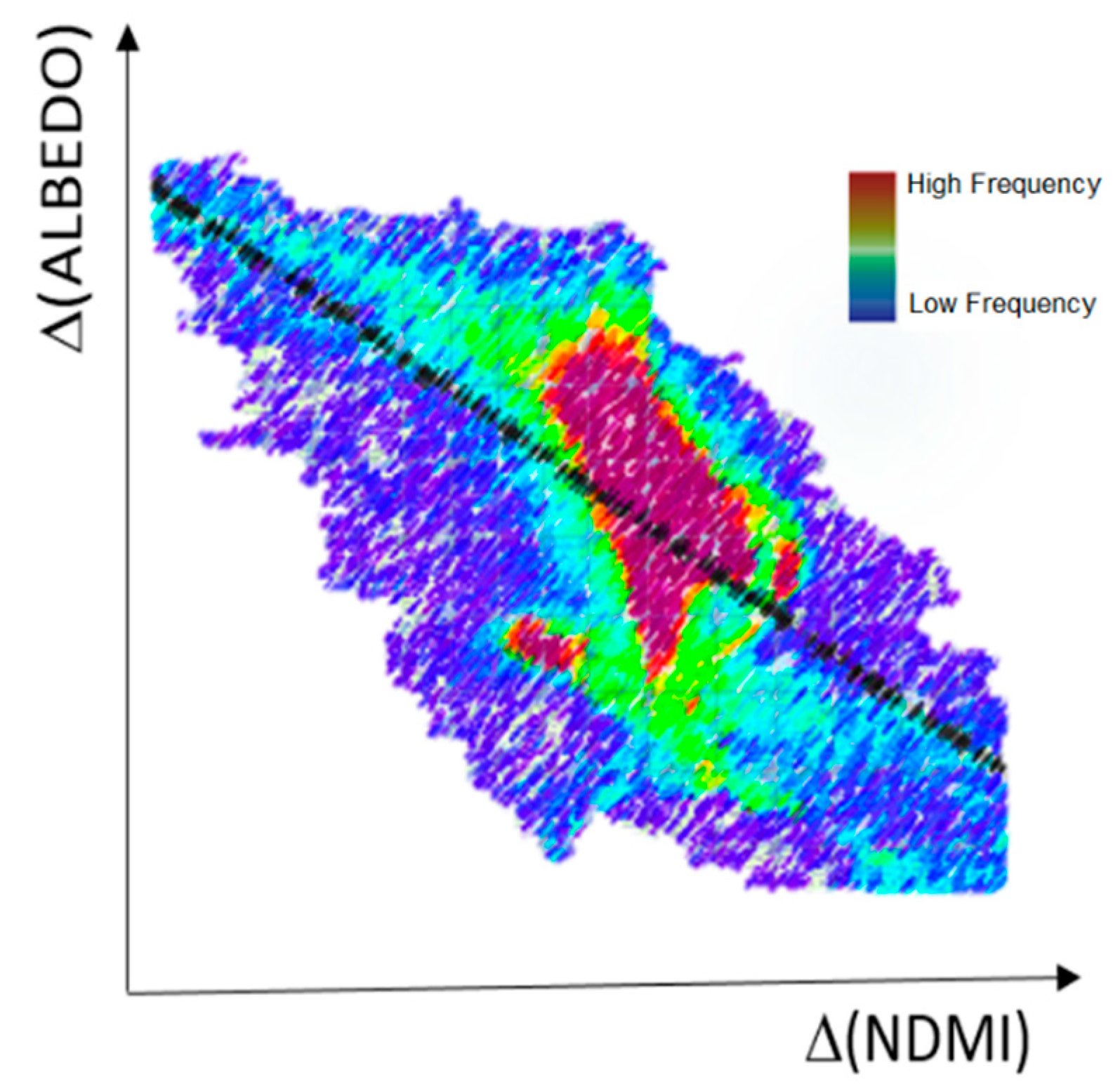
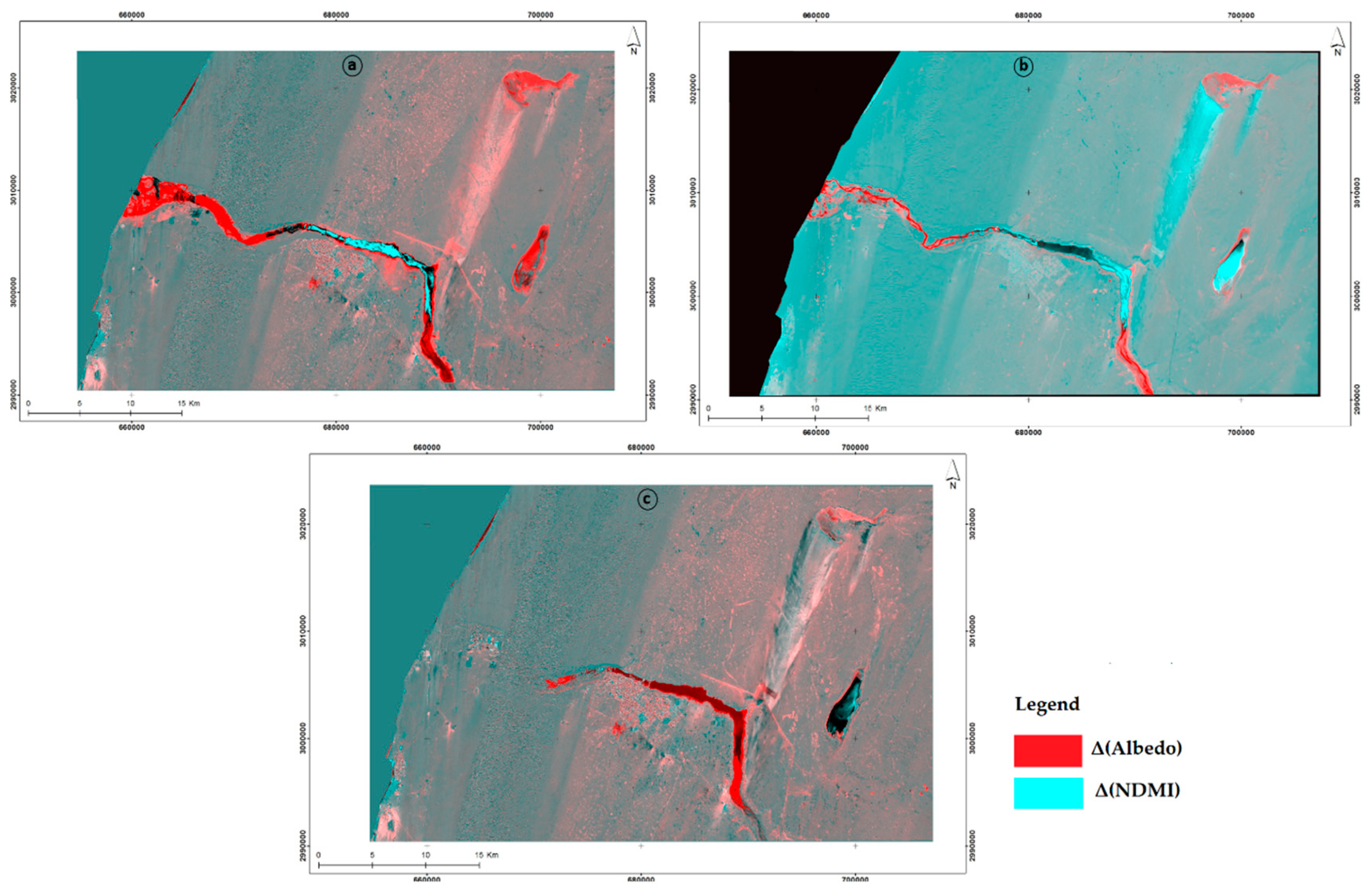
3.1.2. Qualitative Change Analysis by the Color Composite of the (Δ (Albedo), Δ (NDMI)) Feature Space
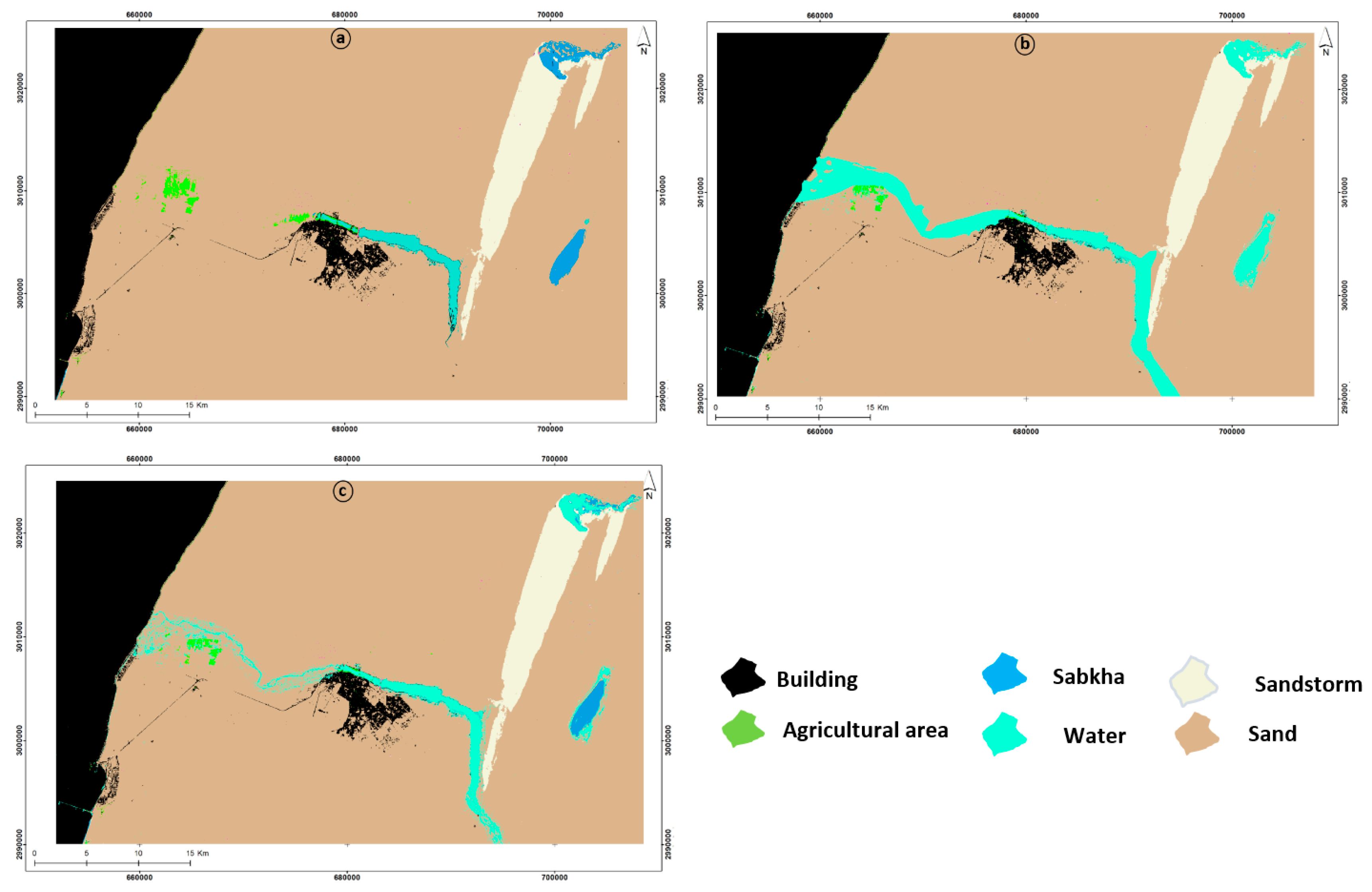
3.1.3. Categorical Change Mapping with SVM
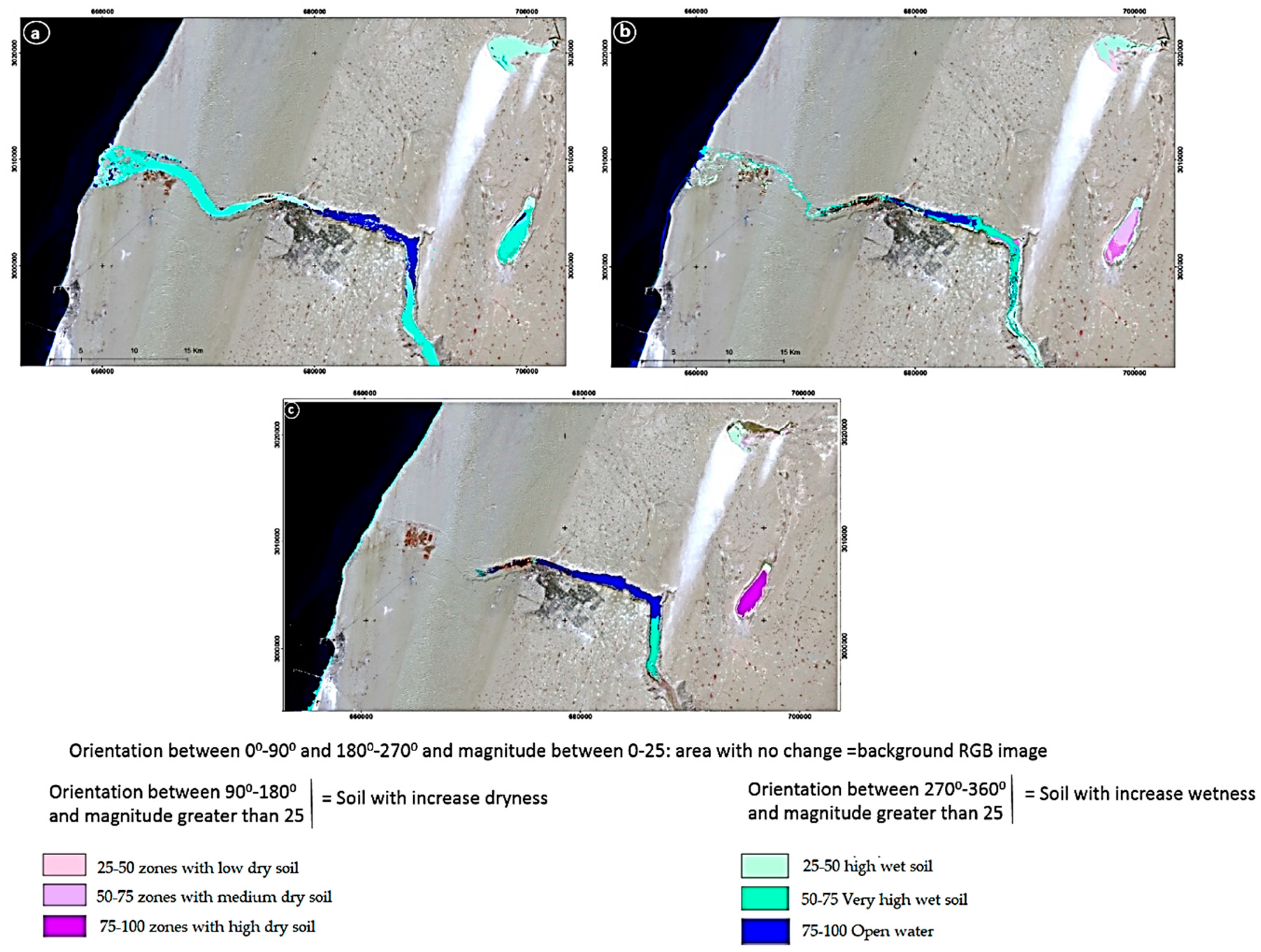
3.1.4. Monitoring of Moisture/Dryness Wetland Information by Fusion of Spectral Processing and Categorical Processing
3.2. Change Mapping Obtained from SAR Data
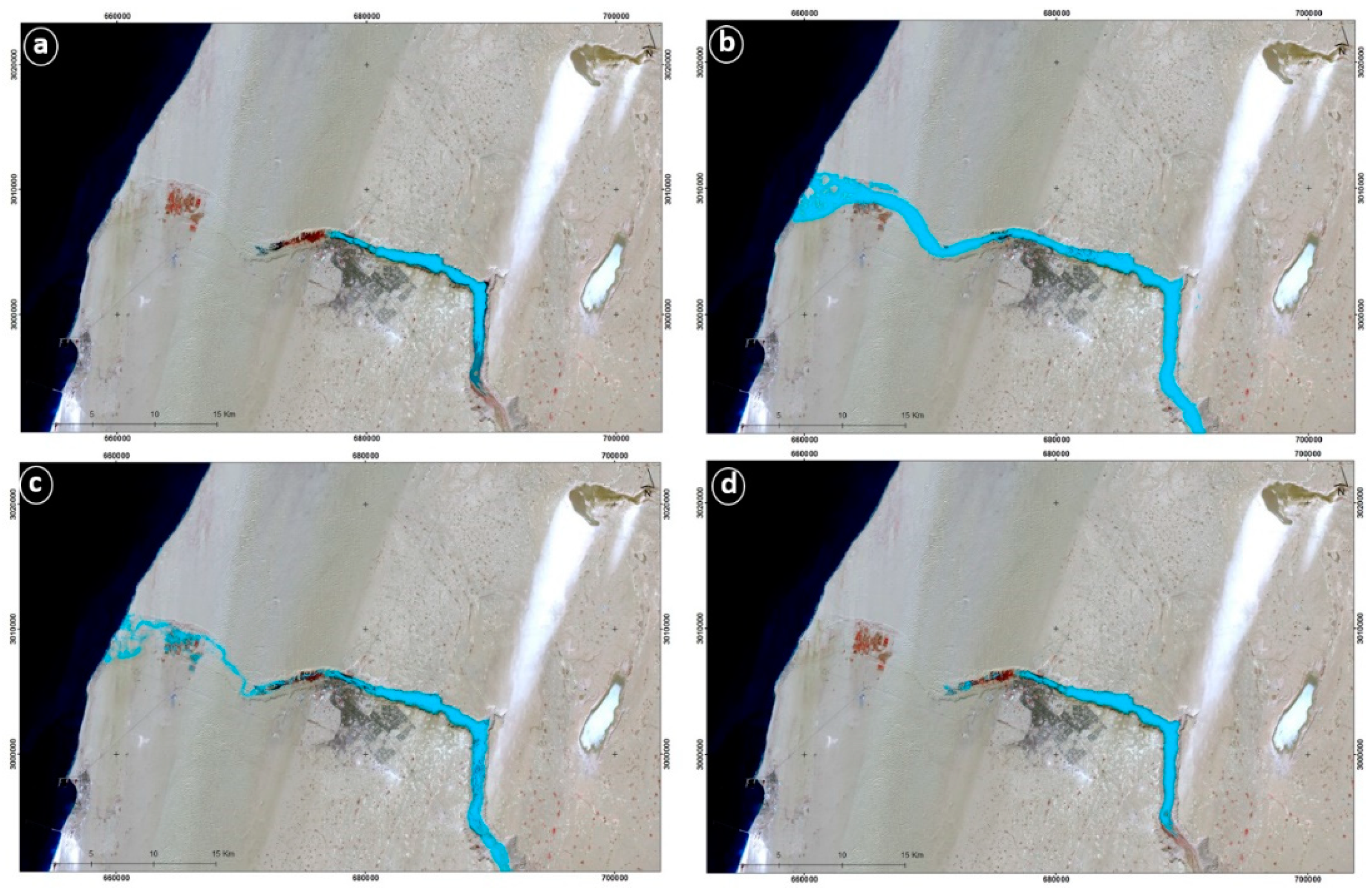
3.3. Monitoring River Water Extent after Flash Flood
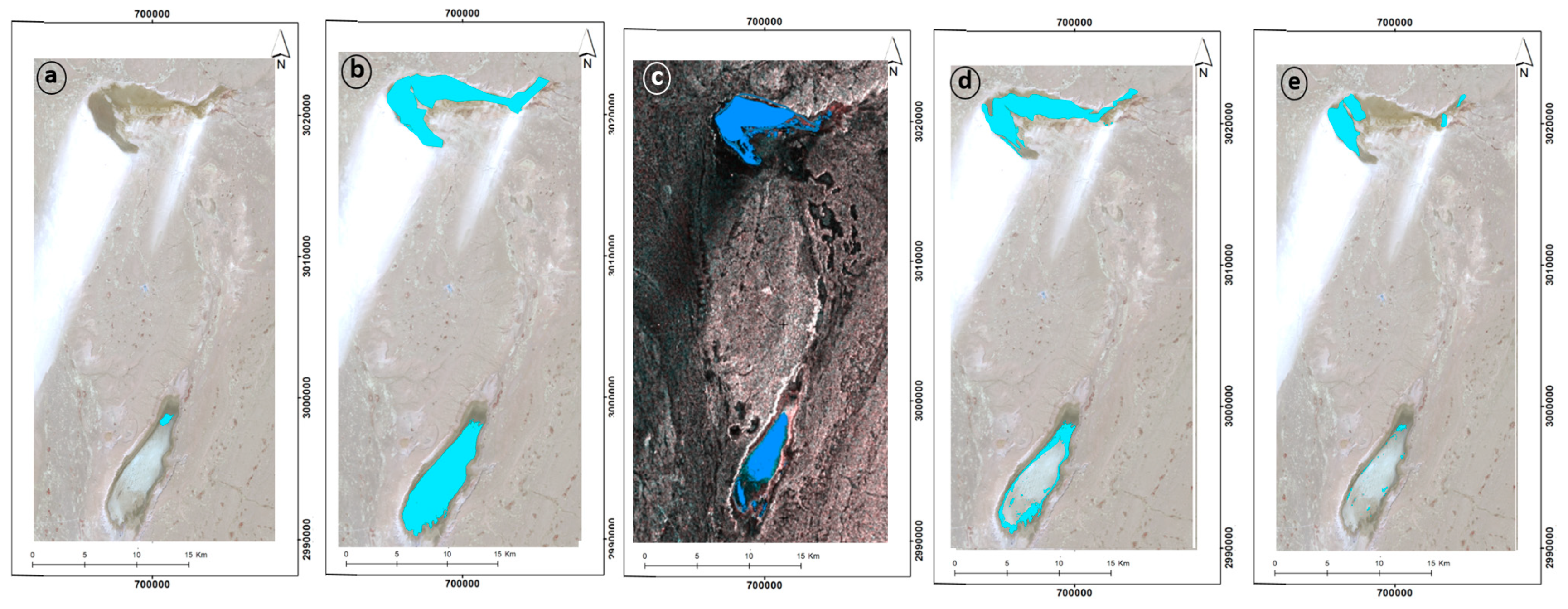
3.4. Monitoring Sabkha Water Extent and Soil Wetness after Flash Flood
3.5. Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Javelle, P.; Demmargne, J.; Defrance, D.; Pansu, J.; Arnaud, P. Evaluating flash flood warnings at ungauged locations using post-event surveys: A case study with the AIGA warning system. Hydrol. Sci. J. 2014, 59, 1390–1402. [Google Scholar] [CrossRef]
- Psomiadis, E. Flash Flood Area mapping utilising Sentinel-1 Radar Data, Earth Resources and Environmental Remote Sensing/GIS Applications VII. Proc. SPIE 2017, 10005, 100051G. [Google Scholar]
- Bannari, A.; Kadhem, G.; El-Battay, A.; Hameid, N.A.; Rouai, M. Assessment of Land Erosion and Sediment Accumulation Caused by Runoff after a Flash-Flooding Storm Using Topographic Profiles and Spectral Indices. Adv. Remote Sens. 2016, 5, 315–354. [Google Scholar] [CrossRef]
- Bannari, A.; Ghadeer, A.; El-Battay, A.; Hameed, N.A.; Rouai, M. Detection of Areas Associated with Flash Floods and Erosion Caused by Rainfall Storm Using Topographic Attributes, Hydrologic Indices, and GIS. In Global Changes and Natural Disaster Management: Geo-information Technologies; Springer International Publishing AG: Cham, Switzerland, 2016; Chapter: 13. [Google Scholar]
- Oleire-Oltmanns, S.; Marzolff, I.; Peter, K. Unmanned aerial vehicle (UAV) for monitoring soil erosion in Morocco. Remote Sens. 2012, 4, 3390–3416. [Google Scholar] [CrossRef]
- Kalantar, B.; Pradhan, B.; Naghibi, S.A.; Motevalli, A.; Mansor, S. Assessment of the effects of training data selection on the landslide susceptibility mapping: A comparison between support vector machine (SVM), logistic regression (LR) and artificial neural networks (ANN). Geomat. Nat. Hazards Risk 2018, 9, 49–69. [Google Scholar] [CrossRef]
- Abedi, M.; Norouzi, G.-H.; Bahroudi, A. Support vector machine for multi-classification of mineral prospectivity areas. Comput. Geosci. 2012, 46, 272–283. [Google Scholar] [CrossRef]
- Chang, C.-C.; Lin, C.-J. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Reid, I.; Powell, D.M.; Laronne, J.B.; Garcia, C. Flash floods in desert rivers: Studying the unexpected. Eos Trans. Am. Geophys. Union 2004, 75, 452. [Google Scholar] [CrossRef]
- Warner, T.T. Desert Meteorology; Cambridge University Press: Edinburgh, Scotland, UK, 2004; p. 612. [Google Scholar]
- Reid, I.; Frostick, L.E. Channel form, flows and sediments in deserts. In Arid Zone Geomorphology: Process, form and Change in Drylands; Thomas, D.S.G., Ed.; John Wiley: New York, NY, USA, 1997; pp. 205–229. [Google Scholar]
- Dolman, A.J.; Gash, J.H.C.; Goutorbe, J.-P.; Kerr, Y.; Lebel, T.; Prince, S.D.; Stricker, J.N.M. The role of the land surface in Sahelian climate: HAPEX-Sahel results and future research needs. J. Hydrol. 1997, 188–189, 1067–1079. [Google Scholar] [CrossRef]
- Tanner, S.; Katra, I.; Haim, A.; Zaady, E. Short-term soil loss by eolian erosion in response to different rainfed agricultural practices. Soil Tillage Res. 2016, 155, 149–156. [Google Scholar] [CrossRef]
- Sharratt, B.; Feng, G.; Wendling, L. Loss of soil and PM10 from agricultural fields associated with high winds on the Columbia Plateau. Earth Surf. Proc. Land 2007, 32, 621–630. [Google Scholar] [CrossRef]
- Elbelrhiti, H.; Phillipe, P.; Andreotti, B. Field evidence for surface-wave-induced instability of sand dunes. Nature 2005, 437, 720–723. [Google Scholar] [CrossRef] [PubMed]
- Evans, G.; St. Clement Kendall, C.G.; Skipwith, P. Origin of the coastal flats, the sabkha, off the Trucial coast, Persian Gulf. Nature 1964, 202, 759–761. [Google Scholar] [CrossRef]
- Essefi, E.; Gharsalli, N.; Kalabi, S.; Ben Ameur, M.; Yaich, C. Spectral Analysis of a Core from the Sebkha of Sidi Mansour, Southern Tunisia: The Holocene Cyclostratigraphy. J. Remote Sens. GIS 2015, 4, 141. [Google Scholar] [CrossRef]
- Marquer, L.; Pomel, S.; Abichou, A.; Schulz, E.; Kaniewski, D.; Van Campo, E. Late Holocene high resolution palaeoclimatic reconstruction inferred from Sabkha Mhabeul, southeast Tunisia. Quat. Res. 2008, 70, 240–250. [Google Scholar] [CrossRef]
- Flood, N. Continuity of reflectance data between Landsat-7 ETM+ and Landsat-8 OLI, for both Top-of-Atmosphere and surface reflectance: A study in the Australian landscape. Remote Sens. 2014, 6, 7952–7970. [Google Scholar] [CrossRef]
- Richards, J.A. Remote Sensing Digital Image Analysis: An. Introduction; Springer: Berlin, Germany, 1993; p. 340. [Google Scholar]
- Teillet, P.M. An Algorithm for the Radiometric and Atmospheric Correction of AVHRR Data in the Solar Reflective Channels. Remote Sens. Environ. 1992, 41, 185–195. [Google Scholar] [CrossRef]
- Nguemhe Fils, S.C.; Mimba, M.E.; Dzana, J.G.; Etouna, J.; Mounoumeck, P.V.; Hakdaoui, M. TM/ETM+/LDCM Images for studying land surface temperature (LST) interplay with impervious surfaces changes over time within the Douala Metropolis, Cameroon. J. Indian Soc. Remote Sens. 2018, 46, 131–143. [Google Scholar] [CrossRef]
- Schott, J.R.; Salvanggio, C.; Volchok, W.J. Radiometric scene normalization using pseudo invariant features. Remote Sens. Environ. 2008, 26, 1–16. [Google Scholar] [CrossRef]
- Wang, Y. Using Landsat 7 TM data acquired days after a flood event to delineate the maximum flood extent on a coastal floodplain. Int. J. Remote Sens. 2004, 25, 959–974. [Google Scholar] [CrossRef]
- Gianinetto, M.; Villa, P.; Lechi, G. Post-flood damage evaluation using Landsat TM and ETM+ data integrated with DEM. IEEE Trans. Geosci. Remote Sens. 2006, 44, 236–243. [Google Scholar] [CrossRef]
- Schmid, T.; Koch, M.; Gumuzzio, J. Multisensor approach to determine changes of wetland characteristics in semi-arid environments (Central Spain). IEEE Trans. Geosci. Remote Sens. 2005, 43, 2516–2525. [Google Scholar] [CrossRef]
- Martinis, S. Improving flood mapping in arid areas using Sentinel-1 time series data. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 193–196. [Google Scholar]
- Martinis, S.; Plank, S.; C’wik, K. The Use of Sentinel-1 Time-Series Data to Improve Flood Monitoring in Arid Areas. Remote Sens. 2018, 10, 583. [Google Scholar] [CrossRef]
- Chignell, S.; Anderson, R.; Evangelista, P.; Laituri, M.; Merritt, D. Multi-temporal independent component analysis and Landsat 8 for delineating maximum extent of the 2013 Colorado front range flood. Remote Sens. 2015, 7, 9822–9843. [Google Scholar] [CrossRef]
- Lacava, T.; Filizzola, C.; Pergola, N.; Sannazzaro, F.; Tramutoli, V. Improving flood monitoring by the Robust AVHRR Technique (RAT) approach: The case of the April 2000 Hungary flood. Int. J. Remote Sens. 2010, 31, 2043–2062. [Google Scholar] [CrossRef]
- Richter, B.D.; Mathews, R.; Wigington, R. Ecologically sustainable water management: Managing River flows for ecological integrity. Ecol. Appl. 2003, 13, 206–224. [Google Scholar] [CrossRef]
- Bryant, R.G.; Gilvear, D.J. Quantifying geomorphic and riparian land cover changes either side of a large flood event using airborne remote sensing: River Tay, Scotland. Geomorphology 1999, 29, 307–321. [Google Scholar] [CrossRef]
- Bannari, A.; Ozbakir, B.A.; Langlois, A. Spatial Distribution Mapping of Vegetation Cover in Urban Environment Using TDVI for Quality of Life Monitoring. Int. Geosci. Remote Sens. 2007, 679–682. [Google Scholar] [CrossRef]
- Feng, Q.; Liu, J.; Gong, J. Urban Flood Mapping Based on Unmanned Aerial Vehicle Remote Sensing and Random Forest Classifier—A Case of Yuyao, China. Water 2015, 7, 1437–1455. [Google Scholar] [CrossRef]
- Shi, D.; Yang, X. An assessment of algorithmic parameters affecting image classification accuracy by random forests. Photogramm. Eng. Remote Sens. 2016, 82, 407–417. [Google Scholar] [CrossRef]
- Foody, G.M.; Mcculloch, M.B.; Yates, W.B. Classification of remotely sensed data by an artificial neural network: issues related to training data characteristics. Photogramm. Eng. Remote Sens. 1995, 61, 391–401. [Google Scholar]
- Foschi, P.G.; Smith, D.K. Detecting subpixel woody vegetation in digital imagery using two artificial intelligence approaches. Photogramm. Eng. Remote Sens. 1997, 63, 493–500. [Google Scholar]
- Campolo, M.; Andreussi, P.; Soldati, A. Artificial neural network approach to flood forecasting in the river Arno. Hydrol. Sci. J. 2003, 48, 381–398. [Google Scholar] [CrossRef]
- Foody, G.M. Supervised image classification by MLP and RBF neural networks with and without an exhaustively defined set of classes. Int. J. Remote Sens. 2004, 25, 3091–3104. [Google Scholar] [CrossRef]
- Kim, G.; Barros, A.P. Quantitative flood forecasting using multisensory data and neural networks. J. Hydrol. 2001, 246, 45–62. [Google Scholar] [CrossRef]
- Kavzoglu, T.; Mather, P.M. The use of backpropagating artificial neural networks in land cover classification. Int. J. Remote Sens. 2003, 24, 4907–4938. [Google Scholar] [CrossRef]
- Hsu, K.L.; Gao, X.; Sorooshian, S.; Gupta, H.V. Precipitation estimation from remotely sensed information using artificial neural networks. J. Appl. Meteorol. 1997, 36, 1176–1190. [Google Scholar] [CrossRef]
- Hsu, K.L.; Gupta, H.V.; Sorooshian, S. Artificial neural network modelling of the rainfall-runoff process. Water Resour. Res. 1995, 31, 2517–2530. [Google Scholar] [CrossRef]
- Imrie, C.E.; Durucan, S.; Korre, A. River flow prediction using artificial neural networks: Generalizations beyond the calibration range. J. Hydrol. 2000, 233, 138–153. [Google Scholar] [CrossRef]
- Yang, X. Parameterizing support vector machines for land cover classification. Photogramm. Eng. Remote Sens. 2011, 77, 27–37. [Google Scholar] [CrossRef]
- Sachdeva, S.; Bhatia, T.; Verma, A.K. Flood susceptibility mapping using GIS-based support vector machine and particle swarm optimization: A case study in Uttarakhand (India). In Proceedings of the 2017 8th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Delhi, India, 3–5 July 2017; pp. 1–7. [Google Scholar]
- Shafizadeh-Moghadam, H.; Valavi, R.; Shahabi, H.; Chapi, K.; Shirzadi, A. Novel forecasting approaches using combination of machine learning and statistical models for flood susceptibility mapping. J. Environ. Manag. 2018, 217, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Tehrany, M.S.; Pradhan, B.; Jebur, M.N. Flood susceptibility mapping using a novel ensemble weights-of-evidence and support vector machine models in GIS. J. Hydrol. 2014, 512, 332–343. [Google Scholar] [CrossRef]
- Zeng, Y.; Xiang, N.; Feng, Z.; Hu, H. Albedo-NDVI space and remote sensing synthesis index models for desertification monitoring. Sci. Geogr. Sin. 2006, 26, 75–81. [Google Scholar]
- Zongyi, M.; Yaowen, X.; Jizong, J.; Linlin, L.; Xiangqian, W. The Construction and Application of an Albedo-NDVI Based Desertification Monitoring Model. Procedia Environ. Sci. 2011, 10, 2029–2035. [Google Scholar]
- Dobos, E. Albedo Encyclopedia of Soil Science, 2nd ed.; Rattan Lal CRC 2003; Springer: Berlin, Germany, 2007; ISBN: 978-0-8493-3830-4 eBook ISBN 978-1-4398-7062-4. [Google Scholar]
- Irons, J.R.; Weismiller, R.A.; Petersen, G.W. Soil Reflectance. In Theory and Applications of Optical Remote Sensing; Asrar, G., Ed.; John Wiley & Sons, Inc.: New York, NY, USA, 1989; pp. 66–106. [Google Scholar]
- Xu, H. Modification of normalized difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Feyisa, G.L.; Meilbya, H.; Fensholtb, R.; Proud, S.R. Automated Water Extraction Index: A new technique for surface water mapping using Landsat imagery. Remote Sens. Environ. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- Notti, D.; Giordan, D.; Caló, F.; Pepe, A.; Zucca, F.; Galve, J.P. Potential and Limitations of Open Satellite Data for Flood Mapping. Remote Sens. 2018, 10, 1673. [Google Scholar] [CrossRef]
- Lobell, D.; Asner, G. Moisture Effects on Soil Reflectance. Soil Sci. Am. J. 2002, 66, 722–727. [Google Scholar] [CrossRef]
- Wang, L.; Qu, J.J. NMDI: A Normalized Multi-Band Drought Index for Monitoring Soil and Vegetation Moisture with Satellite Remote Sensing. Geophys. Res. Lett. 2007, 34, 1–5. [Google Scholar] [CrossRef]
- Chen, C.F.; Valdez, M.C.; Chang, N.B.; Chang, L.Y.; Yuan, P.Y. Monitoring Spatiotemporal Surface Soil Moisture Variations during Dry Seasons in Central America With Multisensor Cascade Data Fusion. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4340–4355. [Google Scholar] [CrossRef]
- Becerril-Pi, R.; Mastachi-Loza, C.A.; Gonzalez-Sosa, E.; Díaz-Delgado, C.; Khalidou, M.B. Assessing desertification risk in the semi-arid highlands of central Mexico. J. Arid Environ. 2015, 120, 4–13. [Google Scholar] [CrossRef]
- Verstraete, M.M.; Pinty, B. Designing optimal spectral indexes for remote sensing applications. Remote Sens. Environ. 1996, 3434, 1254–1265. [Google Scholar] [CrossRef]
- Jensen, J.R. Remote Sensing of the Environment: An. Earth Resource Perspective; Prentice-Hall: Upper Saddle River, NJ, USA, 2000. [Google Scholar]
- Youssef, A.M.; Pradhan, B.; Sefry, S.A. Flash flood susceptibility assessment in Jeddah city (Kingdom of 773 Saudi Arabia) using bivariate and multivariate statistical models. Environ. Earth Sci. 2016, 75, 12. [Google Scholar] [CrossRef]
- Chen, J.; Gong, P.; He, C.; Pu, R.; Shi, P. Land-use/land-cover change detection using improved change-vector analysis. Photogram. Eng. Remote Sens. 2003, 69, 369–379. [Google Scholar] [CrossRef]
- Bayarjargal, Y.; Karnieli, A.; Bayasgalan, M.; Khudulmur, S.; Gandush, C.; Tucker, C.J. A comparative study of NOAA–AVHRR derived drought indices using change vector analysis. Remote Sens. Environ. 2006, 105, 9–22. [Google Scholar] [CrossRef]
- Clement, M.A.; Kilsby, C.G.; Moor, P. Multi-temporal synthetic aperture radar flood mapping using change detection. J. Flood Risk Manag. 2017, 11, 152–168. [Google Scholar] [CrossRef]
- Matgen, P.; Hostache, R.; Schumann, G.; Pfister, L.; Hoffmann, L.; Savenije, H.H.G. Towards an automated SAR-based flood monitoring system: Lessons learned from two case studies. Phys. Chem. Earth 2011, 36, 241–252. [Google Scholar] [CrossRef]
- Martinis, S. Automatic Near Real-Time Flood Detection in High Resolution X-Band Synthetic Aperture Radar Satellite Data Using Context-Based Classification on Irregular Graphs. Ph.D. Thesis, LMU München: Faculty of Geosciences, Utrecht, The Netherlands, 17 December 2010. [Google Scholar]
- Gan, T.Y.; Zunic, F.; Kuo, C.-C.; Strobi, T. Flood mapping of Danube River at Romania using single and multi-date ERS2-SAR images. Int. J. Appl. Earth Obs. Geoinf. 2012, 18, 69–81. [Google Scholar] [CrossRef]
- Ardiana, S.; Ahmad, A.; Kadir, O. Capability of Radarsat Data in Monsoon Flood Monitoring. Proc. GIS Dev. 2000, 1–6. [Google Scholar]
- Martinez, J.M.; Le Toan, T. Mapping of flood dynamics and spatial distribution of vegetation in the Amazon floodplain using multitemporal SAR data. Remote Sens. Environ. 2007, 108, 209–223. [Google Scholar] [CrossRef]
- Ormsby, J.P.; Blanchard, B.J.; Blanchard, A.J. Detection of lowland flooding using active microwave systems. Photogramm. Eng. Remote Sens. 1985, 51, 317–328. [Google Scholar]
- Rao, G.S.; Brinda, V.; Manju Sree, P.; Bhanumurthy, V. Advantage of multi-polarized SAR data for flood extent delineation. Proc. SPIE 2006, 6410, 64100Z. [Google Scholar]
- Schumann, G.; Matgen, P.; Hoffmann, L.; Hostache, R.; Pappenberger, F.; Pfister, L. Deriving distributed roughness values from satellite radar data for flood inundation modellin. J. Hydrol. 2007, 344, 96–111. [Google Scholar] [CrossRef]
- Vilches, J.P. Detection of Areas Affected by Flooding River using SAR images. In Seminar: Master in Space Applications for Emergency Early Warning and Response; National University of Cordoba: Córdoba, Argentina, 2013; p. 40. [Google Scholar]
- Voigt, S.; Martinis, S.; Zwenzner, H.; Hahmann, T.; Twele, A.; Schneiderhan, T. Extraction of flood masks using satellite based very high-resolution SAR data for flood management and modeling. In Proceedings of the 4th International Symposium on Flood Defense Managing Flood Risk Reliability and Vulnerability, Toronto, ON, Canada, 6–8 May 2008; pp. 1–8. [Google Scholar]
- Touzi, R.; Hélie, R.; Filfil, R. On the use of polarimetric SAR information for extraction of wetland indicators. In Proceedings of the IGARSS’05, Seoul, Korea, 25–29 July 2005. [Google Scholar]
- Barber, D.G.; Hochheim, K.P.; Dixon, R.; Mosscrop, D.R.; Mcmullan, M.J. The role of Earth observation technologies in flood mapping: A Manitoba case study. Can. J. Remote Sens. 1996, 22, 137–143. [Google Scholar] [CrossRef]
- Toyra, J.; Pietroniro, A. Towards operational monitoring of a northern wetland using geomatics-based techniques. Remote Sens. Environ. 2005, 97, 174–191. [Google Scholar] [CrossRef]
- Pultz, T.J.; Crevier, Y.; Brown, R.J.; Boisvert, J. Monitoring of local environmental conditions with SIR-C/XSAR. Remote Sens. Environ. 1997, 59, 248–255. [Google Scholar] [CrossRef]
- Ramsey, E.; Rangoonwala, A.; Bannister, T. Coastal flood inundation monitoring with satellite C-band and L-band Synthetic Aperture Radar data. J. Am. Water Resour. Assoc. 2013, 49, 1239–1260. [Google Scholar] [CrossRef]
- Emran, A.; Hakdaoui, M.; Chorowicz, J. Anomalies on geologic maps from multispectral and textural classification: The bleida mining district (Morocco). Remote Sens. Environ. 1996, 57, 13–21. [Google Scholar] [CrossRef]
- Emran, A.; Hakdaoui, M.; Chorowicz, J. Spectral signatures and textures in geological mapping by direct HRV-XS classification of SPOT images of deserts-The mining sector of Zgounder (Anti-Atlas, Morocco). Int. J. Remote Sens. 1996, 17, 863–877. [Google Scholar] [CrossRef]
- Pontius, R.G.; Millones, M. Death to Kappa: Birth of quantity disagreement and allocation disagreement for accuracy assessment. Int. J. Remote Sens. 2011, 32, 4407–4429. [Google Scholar] [CrossRef]
- Ayala-Izurieta, J.E.; Márquez, C.O.; García, V.J.; Recalde-Moreno, C.G.; Rodríguez-Llerena, M.V.; Damián-Carrión, D.A. Land Cover Classification in an Ecuadorian Mountain Geosystem Using a Random Forest Classifier, Spectral Vegetation Indices, and Ancillary Geographic Data. Geosciences 2017, 7, 34. [Google Scholar] [CrossRef]
- Hostache, R.; Matgen, P.; Wagner, W. Change detection approaches for flood extent mapping: How to select the most adequate reference image from online archives? Int. J. Appl. Earth Obs. Geoinf. 2012, 19, 205–213. [Google Scholar] [CrossRef]
- Xiua, L.; Yana, C.; Lic, X.; Qiand, D.; Fenga, K. Changes in wetlands and surrounding land cover in a desert area under the influences of human and climatic factors: A case study of the Hongjian Nur region. Ecol. Indic. 2019, 101, 261–273. [Google Scholar] [CrossRef]
- Guo, M.; Li, J.; Sheng, C.; Xu, J.; Wu, L. A Review of Wetland Remote Sensing. Sensors 2017, 17, 777. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Instrument | Mode/Path-Row | Acquisition Date | Use |
|---|---|---|---|---|
| Sentinel 2 A | MSI | L1C TC SGS | 13 October 2016 | Two weeks before flash-flood event; used to calculate reference image. |
| Landsat 8 | OLI | LC (105-41) | 28 September 2016 | One month before flash flood; used to calculate reference image. |
| Sentinel 2 A | MSI | L1C TL SGS | 30 October 2016 | One day after the flash-flood event; used for flood extent mapping. |
| Landsat 8 | OLI | LC (205-41) | 13 November 2016 | Two weeks after flash flood; used for water and moisture/dryness soil information extraction. |
| Sentinel 2 A | MSI | L1C TL SGS | 1 January 2017 | Two months after flash-flood event; used for water and moisture/dryness soil information. |
| Sentinel 1 A | C-SAR | IW GRDH 1SDV(VV,VH) | 21 October 2016 | One week before flash-flood event. |
| Sentinel 1 B | C-SAR | IW GRDH 1SDV(VV,VH) | 2 November 2016 | Three days after flash-flood event. |
| Band before Normalization | Band after Normalization | |||
|---|---|---|---|---|
| Mean | SD | Mean | SD | |
| Reference before flood 1 | 1956.47 | 95.21 | 2050.66 | 105.14 |
| Reference before flood 2 | 2364.15 | 145.78 | 2390.44 | 155.55 |
| Reference before flood 3 | 3291.65 | 237.01 | 3335.65 | 255.66 |
| Reference before flood 4 | 4050.43 | 224.13 | 4066.77 | 234.66 |
| Reference before flood 5 | 4676.46 | 288.21 | 4705.33 | 299.77 |
| Reference before flood 6 | 3558.22 | 275.94 | 3588.88 | 285.98 |
| MSI one day after flood 2 | 1949.74 | 92.74 | 1966.65 | 100.79 |
| MSI one day after flood 3 | 2358.06 | 141.98 | 2377.09 | 156.88 |
| MSI one day after flood 4 | 3286.00 | 231.30 | 3289.88 | 244.54 |
| MSI one day after flood 8A | 4034.24 | 218.96 | 4055.51 | 277.77 |
| MSI one day after flood 11 | 4655.17 | 266.52 | 4675.66 | 288.76 |
| MSI one day after flood 12 | 3543.82 | 258.24 | 3588.74 | 278.62 |
| NDMIn | Albedon | NDWIn | NMDIn | |
|---|---|---|---|---|
| NDMIn | 1 | −0.49 | 0.84 | 0.88 |
| Albedon | −0.49 | 1 | 0.75 | 0.72 |
| NDWIn | 0.84 | 0.75 | 1 | 0.97 |
| NMDIn | 0.88 | 0.72 | 0.97 | 1 |
| Class | Accuracy Assessment % | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Reference (Ground Truth) | Building | Sabkha | Sandstorm | Sand | Agriculture | Water | OA | ||||
| Building | 191 | 3 | 5 | 3 | 2 | 10 | 211 | 10.9 | 89.1 | 87.3 | 86.45 |
| Sabkha | 2 | 186 | 5 | 2 | 10 | 6 | 209 | 12 | 88 | 84.7 | |
| Sandstorm | 7 | 13 | 180 | 4 | 4 | 7 | 211 | 16.6 | 83.4 | 77.8 | |
| Sand | 6 | 3 | 12 | 188 | 2 | 8 | 219 | 12.3 | 87.7 | 88 | |
| Agriculture | 3 | 7 | 7 | 6 | 192 | 10 | 219 | 15 | 85 | 88 | |
| Water | 9 | 7 | 19 | 13 | 8 | 180 | 223 | 25.1 | 74.9 | 81.5 | |
| 212 | 216 | 216 | 216 | 216 | 221 | 1292 | |||||
| 12.7 | 15.3 | 22.2 | 12 | 12 | 18.5 | ||||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hakdaoui, S.; Emran, A.; Pradhan, B.; Lee, C.-W.; Nguemhe Fils, S.C. A Collaborative Change Detection Approach on Multi-Sensor Spatial Imagery for Desert Wetland Monitoring after a Flash Flood in Southern Morocco. Remote Sens. 2019, 11, 1042. https://doi.org/10.3390/rs11091042
Hakdaoui S, Emran A, Pradhan B, Lee C-W, Nguemhe Fils SC. A Collaborative Change Detection Approach on Multi-Sensor Spatial Imagery for Desert Wetland Monitoring after a Flash Flood in Southern Morocco. Remote Sensing. 2019; 11(9):1042. https://doi.org/10.3390/rs11091042
Chicago/Turabian StyleHakdaoui, Sofia, Anas Emran, Biswajeet Pradhan, Chang-Wook Lee, and Salomon Cesar Nguemhe Fils. 2019. "A Collaborative Change Detection Approach on Multi-Sensor Spatial Imagery for Desert Wetland Monitoring after a Flash Flood in Southern Morocco" Remote Sensing 11, no. 9: 1042. https://doi.org/10.3390/rs11091042
APA StyleHakdaoui, S., Emran, A., Pradhan, B., Lee, C. -W., & Nguemhe Fils, S. C. (2019). A Collaborative Change Detection Approach on Multi-Sensor Spatial Imagery for Desert Wetland Monitoring after a Flash Flood in Southern Morocco. Remote Sensing, 11(9), 1042. https://doi.org/10.3390/rs11091042