A Geometric Barycenter-Based Clutter Suppression Method for Ship Detection in HF Mixed-Mode Surface Wave Radar


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Data Model and Clutter Statistic Analysis
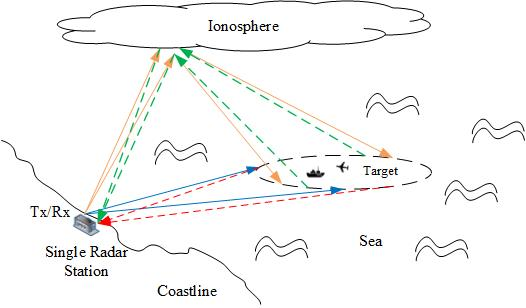
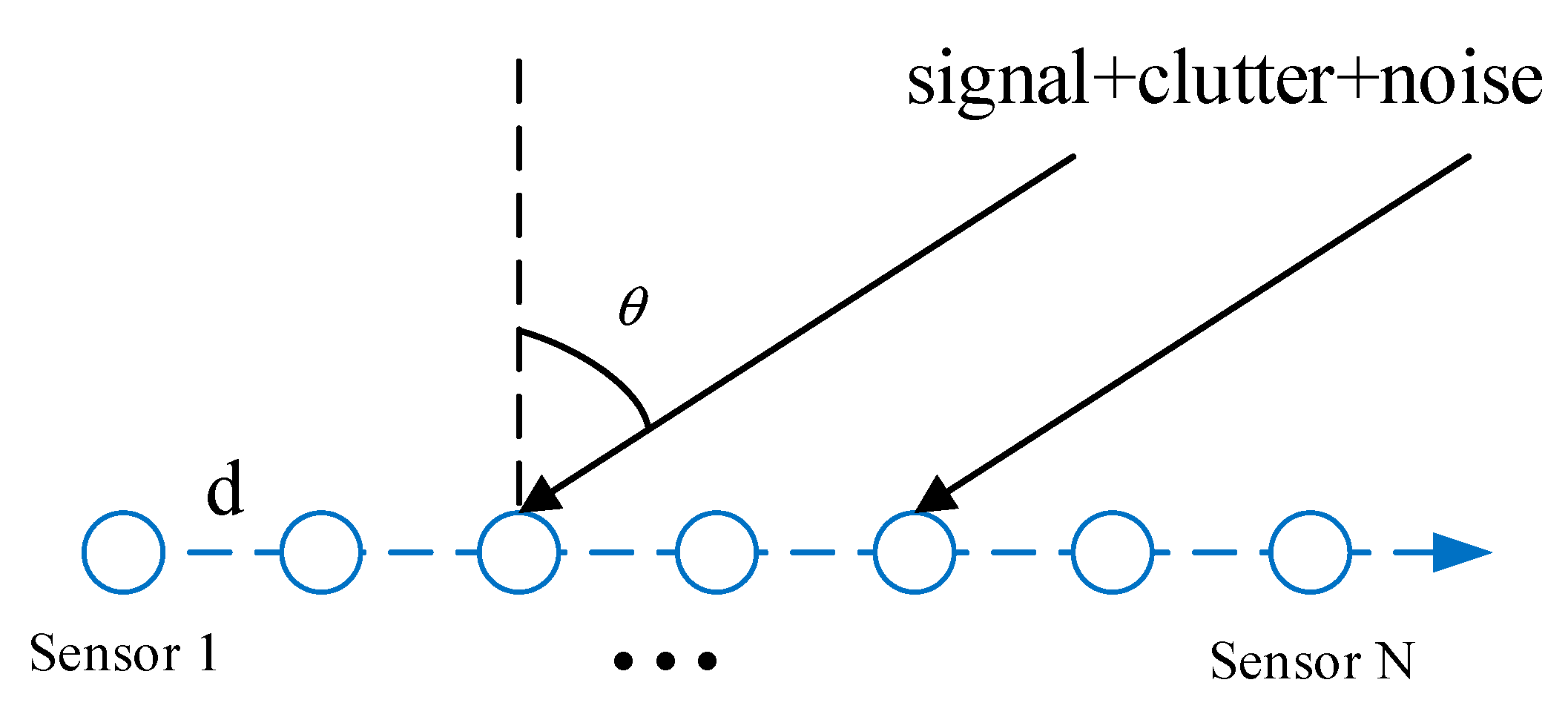
2.1. Signal Model
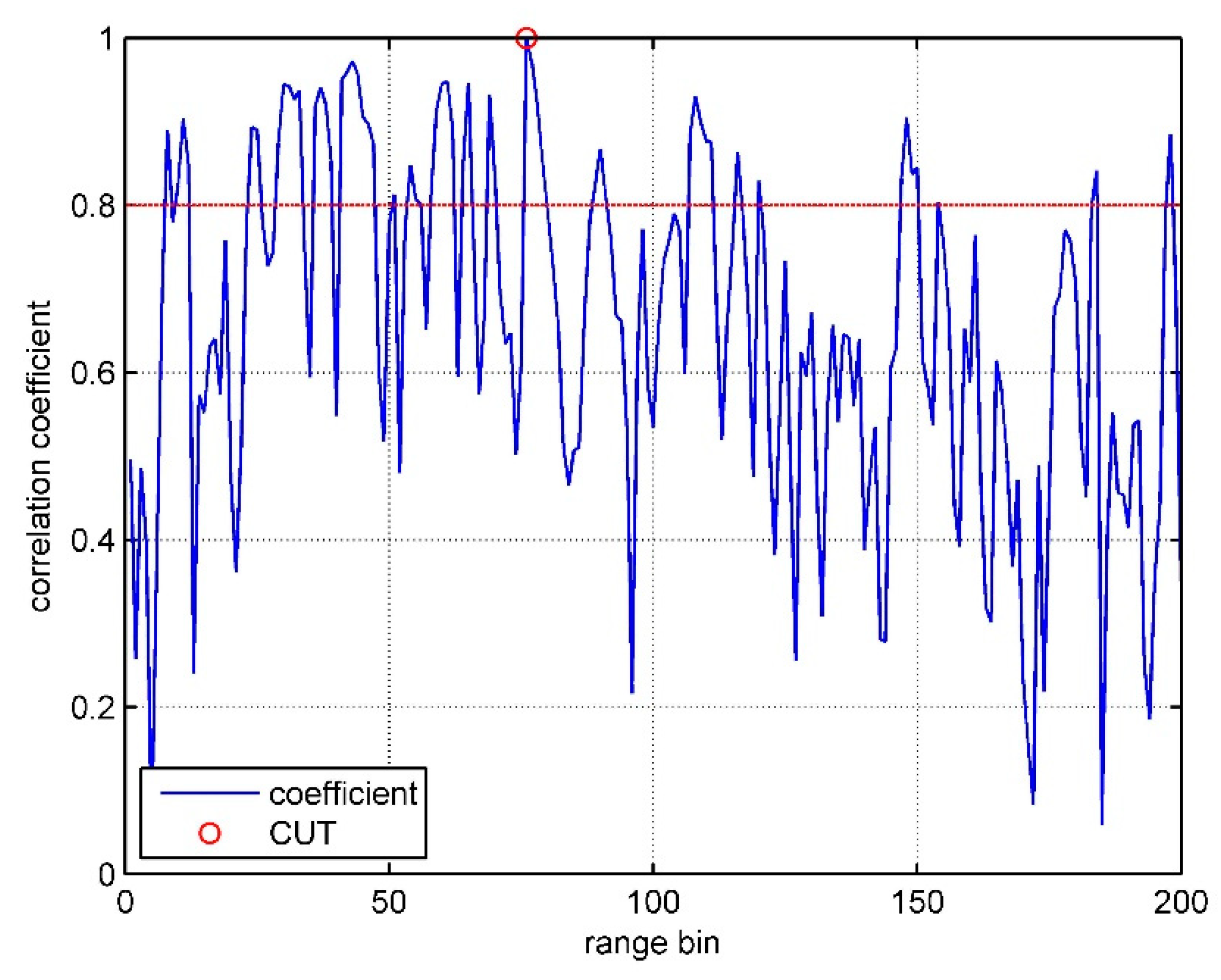
2.2. Range Correlation Analysis
3. Geometric Barycenter-Based Reduced-Dimension STAP Algorithm
3.1. Joint Domain Localized Processing
3.2. Geometric Barycenter-Based Training Data Selector
- Euclidean distance and estimator
- Root-Euclidean distance and estimator
- Power-Euclidean distance and estimator
- Log-Euclidean distance and estimatorwhere , with .
- Calculate the covariance matrices for a single range bin , defined in Section 3.1;
- Suppose the range bin for the cell under test is , calculate the geometric distances and covariance estimator for all the training data in range domain;
- Calculate the generalized inner product for all the training data;
- Set as guard cells to prevent the target self-elimination and sort s in ascending order;
- Select the indices as the training samples which correspond to lowest values of .
4. Simulation Results
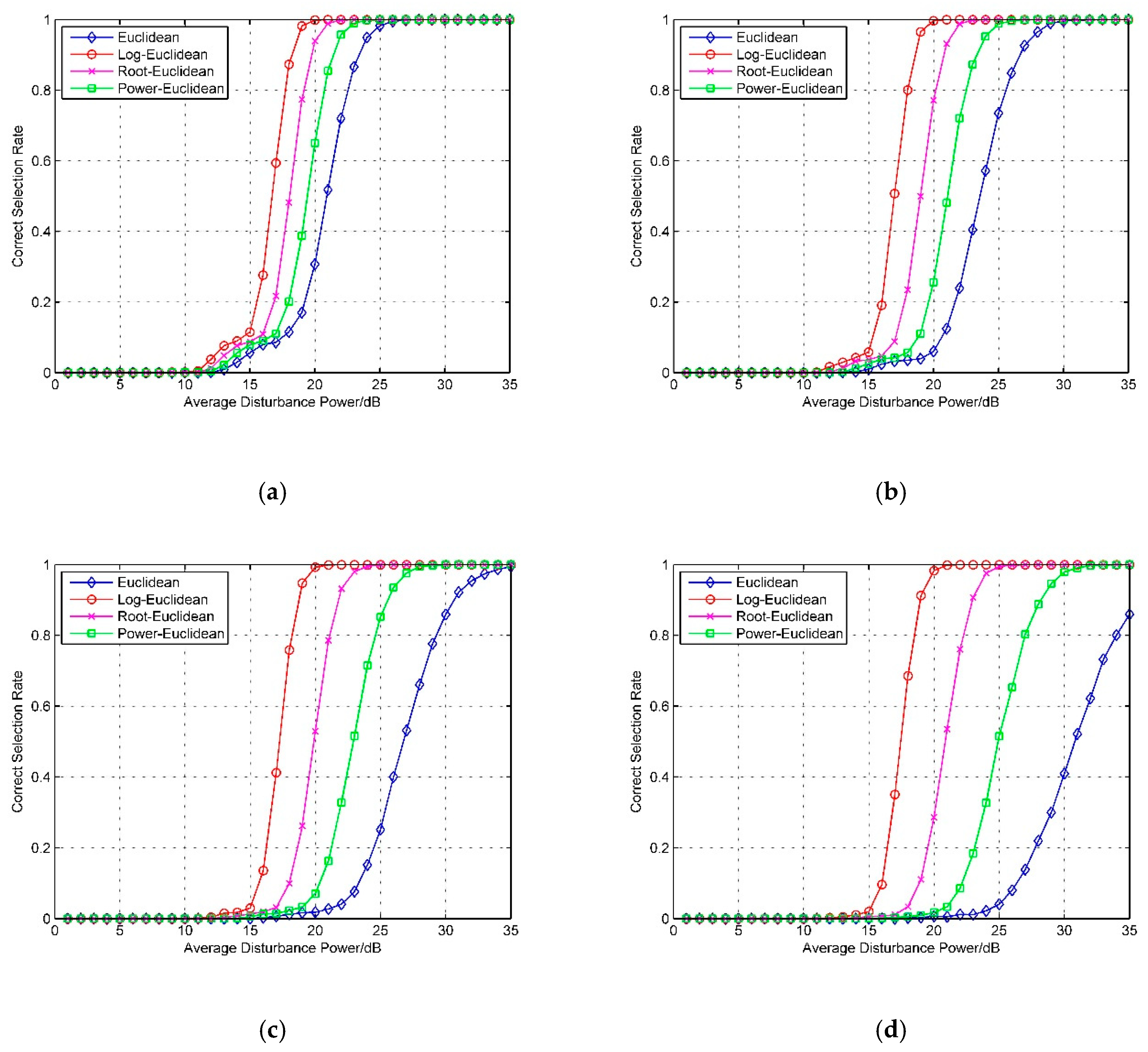
4.1. Selection Performance with Number of Disturbances
4.2. Selection Performance with Disturbance Doppler Frequency
5. Experimental Results
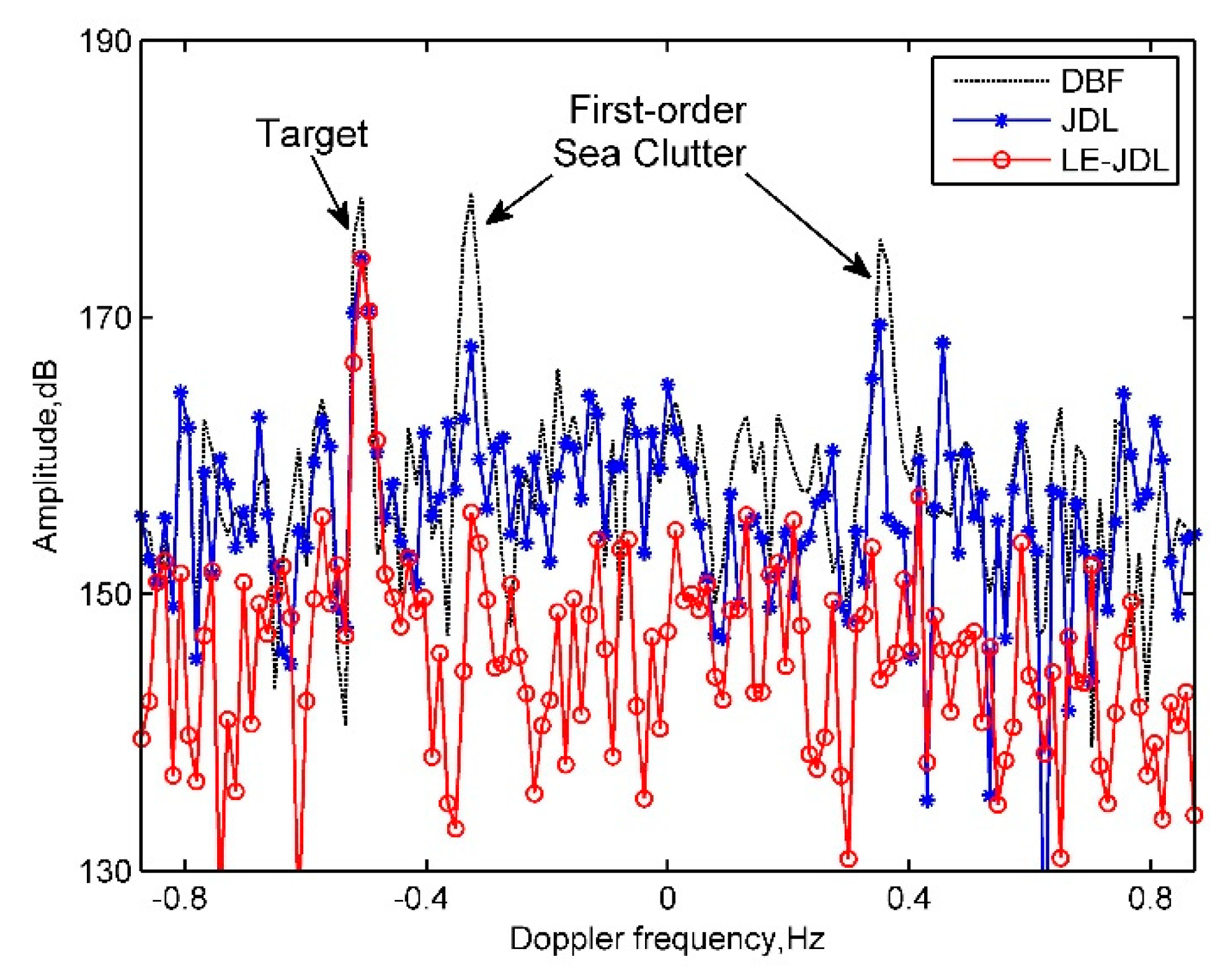
5.1. Measured Data with Simulated Target
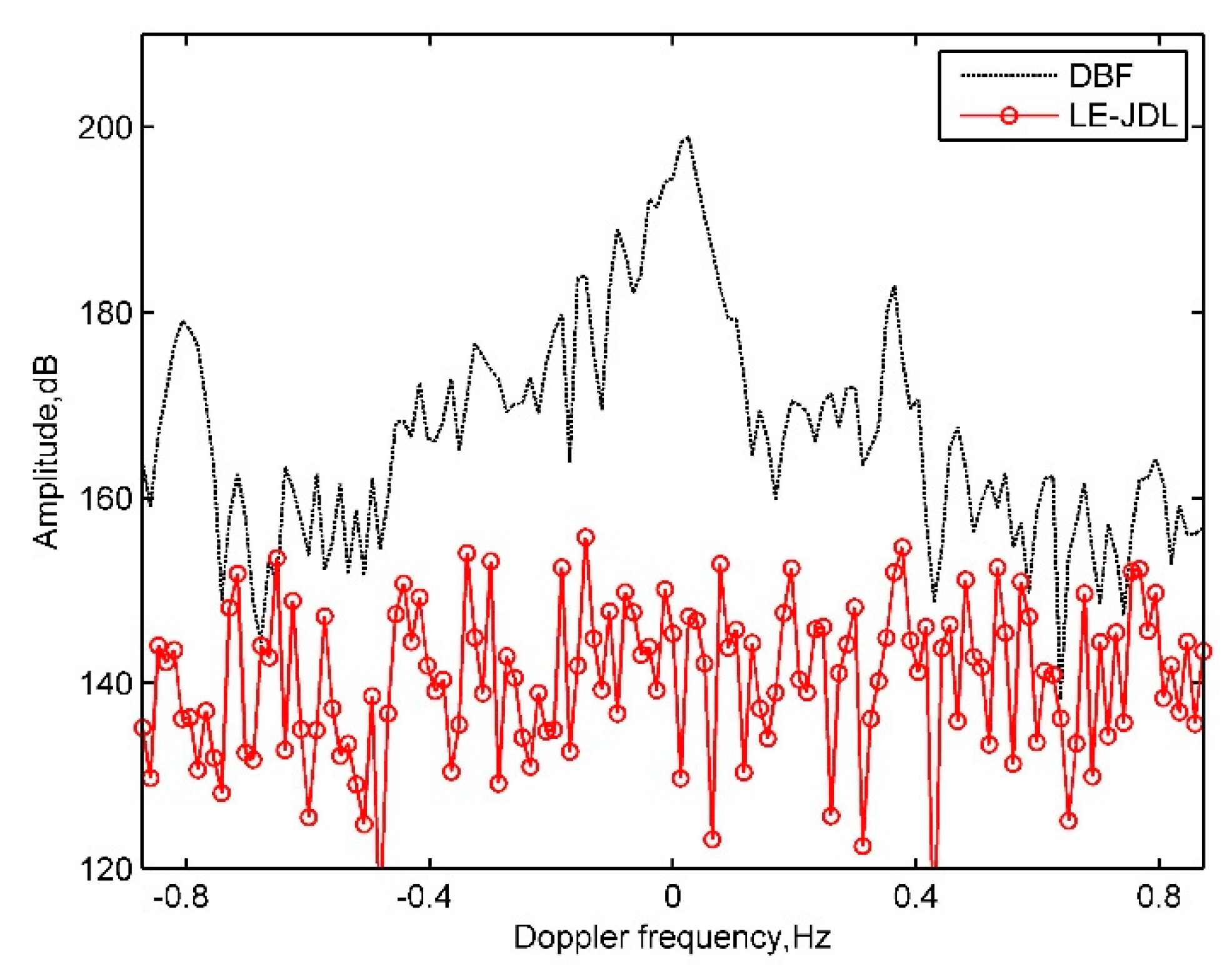
5.2. Measured Data with Non-Cooperative Target
5.3. Measured Data with Ionospheric Clutter
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sevgi, L.; Ponsford, A.; Chan, H.C. An integrated maritime surveillance system based on high-frequency surface-wave radars. 1. Theoretical background and numerical simulations. IEEE Antennas Propag. Mag. 2001, 43, 28–43. [Google Scholar] [CrossRef]
- Ponsford, A.M.; Wang, J. A review of high frequency surface wave radar for detection and tracking of ships. Turk. J. Electr. Eng. Comput. Sci. 2010, 18, 409–428. [Google Scholar] [CrossRef]
- Ponsford, A.; McKerracher, R.; Ding, Z.; Moo, P.; Yee, D. Towards a Cognitive Radar: Canada’s Third-Generation High Frequency Surface Wave Radar (HFSWR) for Surveillance of the 200 Nautical Mile Exclusive Economic Zone. Sensors 2017, 17, 1588. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Yao, D.; Yang, Q.; Dong, Y.N.; Deng, W.B. Knowledge-Based Generalized Side-Lobe Canceller for Ionospheric Clutter Suppression in HFSWR. Remote Sens. 2018, 10, 104. [Google Scholar] [CrossRef]
- Zhao, M.; Yang, Q. A new way of estimating ionospheric virtual height based on island multipath echoes in HFSWR. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 0576–0580. [Google Scholar]
- Zhang, J.; Deng, W.; Zhang, X.; Zhao, M.; Yang, Q. A Method of Track Matching Based on Multipath Echoes in High-Frequency Surface Wave Radar. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 1852–1855. [Google Scholar] [CrossRef]
- Zhao, M.; Zhang, X.; Yang, Q. Modified Multi-Mode Target Tracker for High-Frequency Surface Wave Radar. Remote Sens. 2018, 10, 1061. [Google Scholar] [CrossRef]
- Zhang, J.; Deng, W.; Zhang, X.; Yang, Q. Improved main-lobe cancellation method for space spread clutter suppression in HFSSWR. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; pp. 0197–0201. [Google Scholar]
- Brennan, L.E.; Reed, L.S. Theory of Adaptive Radar. IEEE Trans. Aerosp. Electron. Syst. 1973, AES-9, 237–252. [Google Scholar] [CrossRef]
- Reed, I.S.; Mallett, J.D.; Brennan, L.E. Rapid Convergence Rate in Adaptive Arrays. IEEE Trans. Aerosp. Electron. Syst. 1974, AES-10, 853–863. [Google Scholar] [CrossRef]
- Balaji, B.; Barbaresco, F. Application of Riemannian mean of covariance matrices to space-time adaptive processing. In Proceedings of the 2012 9th European Radar Conference, Amsterdam, The Netherlands, 31 October–2 November 2012; pp. 50–53. [Google Scholar]
- Wang, W.; Wyatt, L.R. Radio frequency interference cancellation for sea-state remote sensing by high-frequency radar. IET Radar Sonar Navig. 2011, 5, 405–415. [Google Scholar] [CrossRef]
- Kang, S.; Ryu, J.; Lee, J.; Jeong, J. Analysis of space-time adaptive processing performance using K-means clustering algorithm for normalisation method in non-homogeneity detector process. IET Signal Process. 2011, 5, 113–120. [Google Scholar] [CrossRef]
- Tang, B.; Tang, J.; Peng, Y. Detection of heterogeneous samples based on loaded generalized inner product method. Digital Signal Process. 2012, 22, 605–613. [Google Scholar] [CrossRef]
- Rabideau, D.J.; Steinhardt, A.O. Improved adaptive clutter cancellation through data-adaptive training. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 879–891. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, Q.; Deng, W. Weak Target Detection within the Nonhomogeneous Ionospheric Clutter Background of HFSWR Based on STAP. Int. J. Antennas Propag. 2013, 2013, 1–11. [Google Scholar] [CrossRef]
- Zhang, X.; Su, Y.; Yang, Q.; Dong, Y.; Deng, W. Space-time adaptive processing-based algorithm for meteor trail suppression in high-frequency surface wave radar. IET Radar Sonar Navig. 2015, 9, 429–436. [Google Scholar] [CrossRef]
- Wu, Y.F.; Wang, T.; Wu, J.X.; Duan, J. Robust training samples selection algorithm based on spectral similarity for space-time adaptive processing in heterogeneous interference environments. IET Radar Sonar Navig. 2015, 9, 778–782. [Google Scholar] [CrossRef]
- Li, H.; Bao, W.; Hu, J.; Xie, J.; Liu, R. A training samples selection method based on system identification for STAP. Signal Process. 2018, 142, 119–124. [Google Scholar] [CrossRef]
- Arnaudon, M.; Barbaresco, F.; Yang, L. Riemannian Medians and Means With Applications to Radar Signal Processing. IEEE J. Sel. Top. Signal Process. 2013, 7, 595–604. [Google Scholar] [CrossRef]
- Aubry, A.; Maio, A.D.; Pallotta, L.; Farina, A. Median matrices and their application to radar training data selection. IET Radar Sonar Navig. 2014, 8, 265–274. [Google Scholar] [CrossRef]
- Cheng, Y.; Hua, X.; Wang, H.; Qin, Y.; Li, X. The Geometry of Signal Detection with Applications to Radar Signal Processing. Entropy 2016, 18, 381. [Google Scholar] [CrossRef]
- Hua, X.; Cheng, Y.; Wang, H.; Qin, Y.; Li, Y. Geometric means and medians with applications to target detection. IET Signal Process. 2017, 11, 711–720. [Google Scholar] [CrossRef]
- Aubry, A.; Maio, A.D.; Pallotta, L. A Geometric Approach to Covariance Matrix Estimation and its Applications to Radar Problems. IEEE Trans. Signal Process. 2018, 66, 907–922. [Google Scholar] [CrossRef]
- Aubry, A.; Maio, A.D.; Pallotta, L.; Farina, A. Covariance matrix estimation via geometric barycenters and its application to radar training data selection. IET Radar Sonar Navig. 2013, 7, 600–614. [Google Scholar] [CrossRef]
- Cui, G.; Li, N.; Pallotta, L.; Foglia, G.; Kong, L. Geometric barycenters for covariance estimation in compound-Gaussian clutter. IET Radar Sonar Navig. 2017, 11, 404–409. [Google Scholar] [CrossRef]
- Lim, C.H.; Aboutanios, E.; Mulgrew, B. Training strategies for joint domain localised-space-time adaptive processing in a bistatic environment. IEE Proceed. Radar Sonar Navig. 2006, 153, 516–524. [Google Scholar] [CrossRef]
- Hong, W.; Lujing, C. On adaptive spatial-temporal processing for airborne surveillance radar systems. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 660–670. [Google Scholar] [CrossRef]











© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Zhang, X.; Deng, W.; Ye, L.; Yang, Q. A Geometric Barycenter-Based Clutter Suppression Method for Ship Detection in HF Mixed-Mode Surface Wave Radar. Remote Sens. 2019, 11, 1141. https://doi.org/10.3390/rs11091141
Zhang J, Zhang X, Deng W, Ye L, Yang Q. A Geometric Barycenter-Based Clutter Suppression Method for Ship Detection in HF Mixed-Mode Surface Wave Radar. Remote Sensing. 2019; 11(9):1141. https://doi.org/10.3390/rs11091141
Chicago/Turabian StyleZhang, Jiazhi, Xin Zhang, Weibo Deng, Lei Ye, and Qiang Yang. 2019. "A Geometric Barycenter-Based Clutter Suppression Method for Ship Detection in HF Mixed-Mode Surface Wave Radar" Remote Sensing 11, no. 9: 1141. https://doi.org/10.3390/rs11091141
APA StyleZhang, J., Zhang, X., Deng, W., Ye, L., & Yang, Q. (2019). A Geometric Barycenter-Based Clutter Suppression Method for Ship Detection in HF Mixed-Mode Surface Wave Radar. Remote Sensing, 11(9), 1141. https://doi.org/10.3390/rs11091141