Biomass and Crop Height Estimation of Different Crops Using UAV-Based Lidar



Abstract
:1. Introduction
2. Materials and Methods
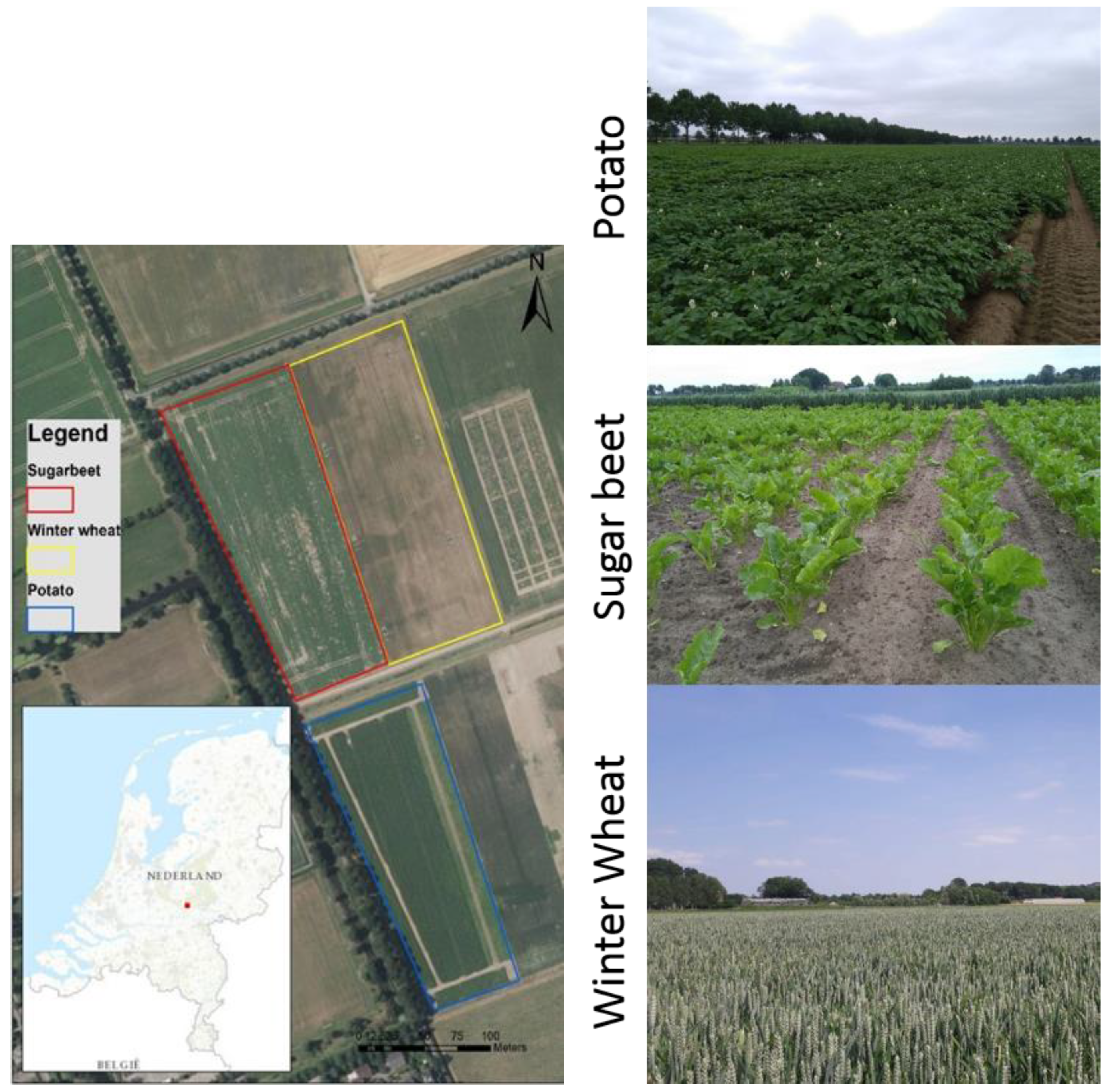
2.1. Study Area
2.2. Data Acquisition
2.2.1. Field Data Collection
2.2.2. UAV-LiDAR Data
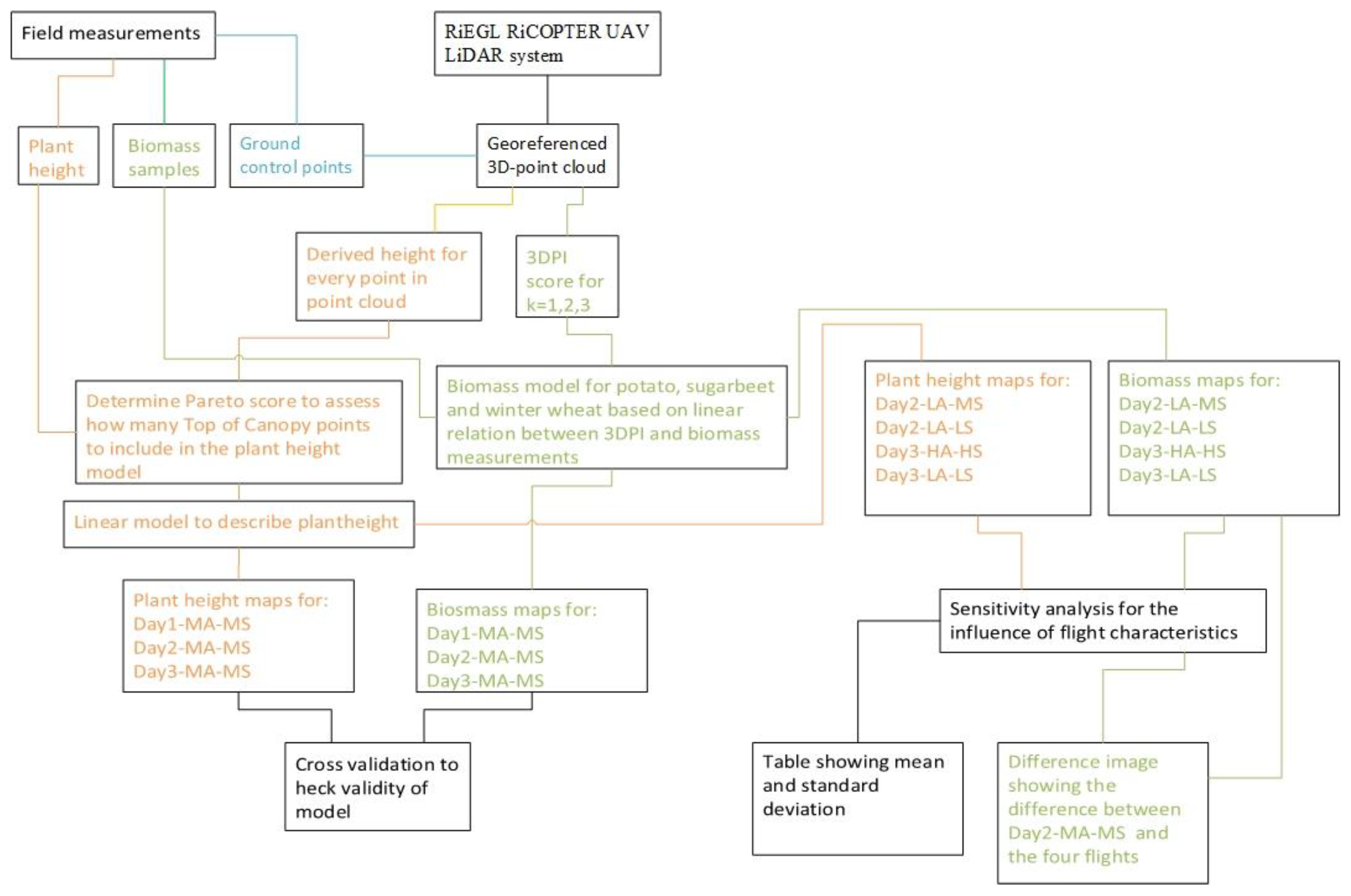
2.3. Data Pre-Processing
2.4. Data Analysis
2.4.1. LiDAR Based Plant Height
2.4.2. Crop Biomass
2.4.3. Model Validation
3. Results
3.1. Crop Specific Models
3.1.1. Plant Height
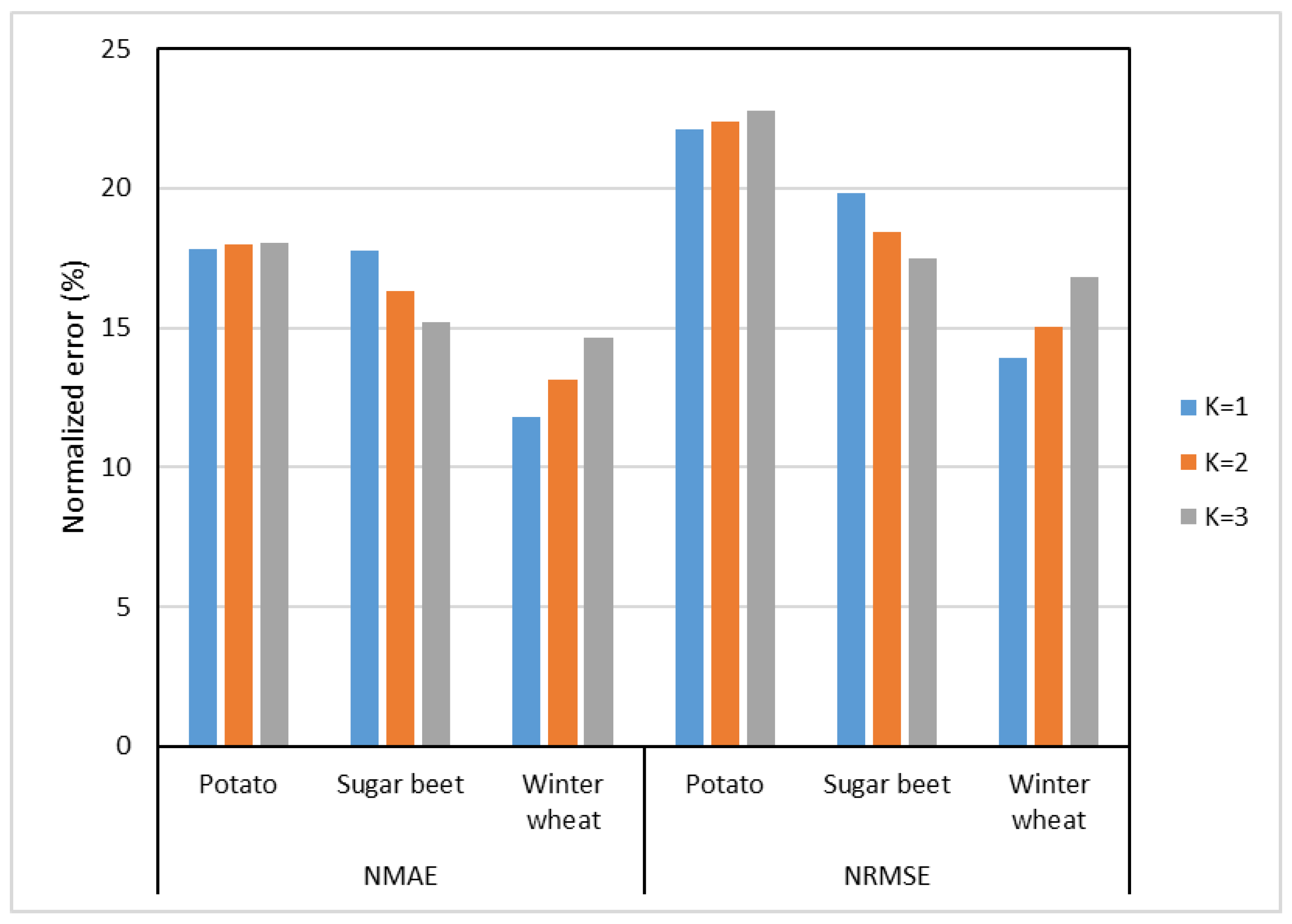
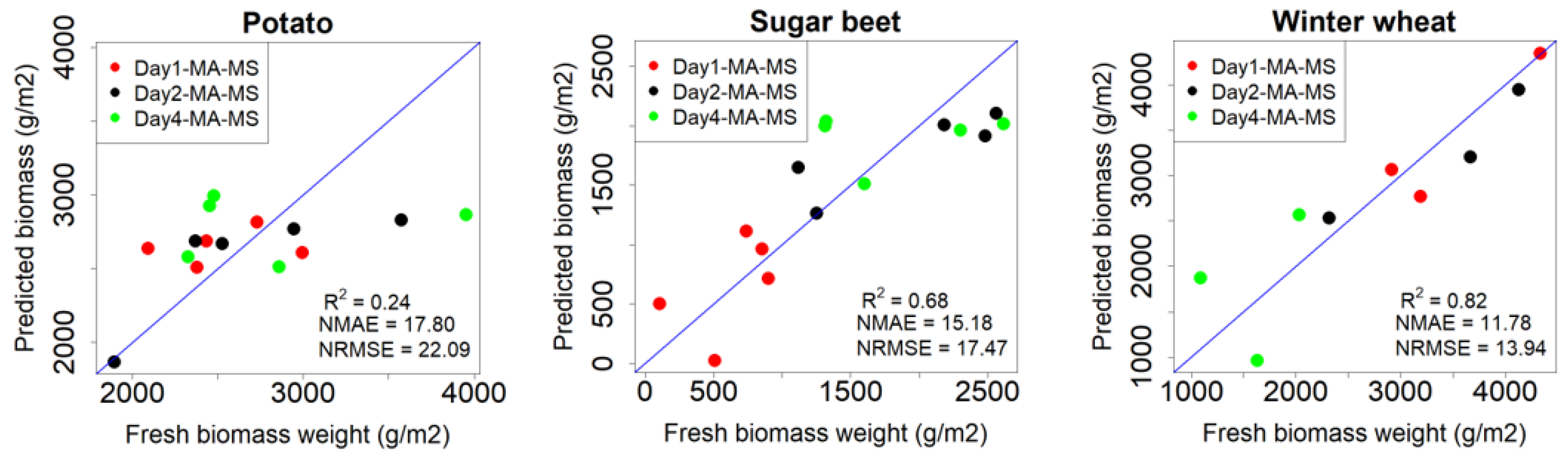
3.1.2. Biomass
3.2. General Prediction Models
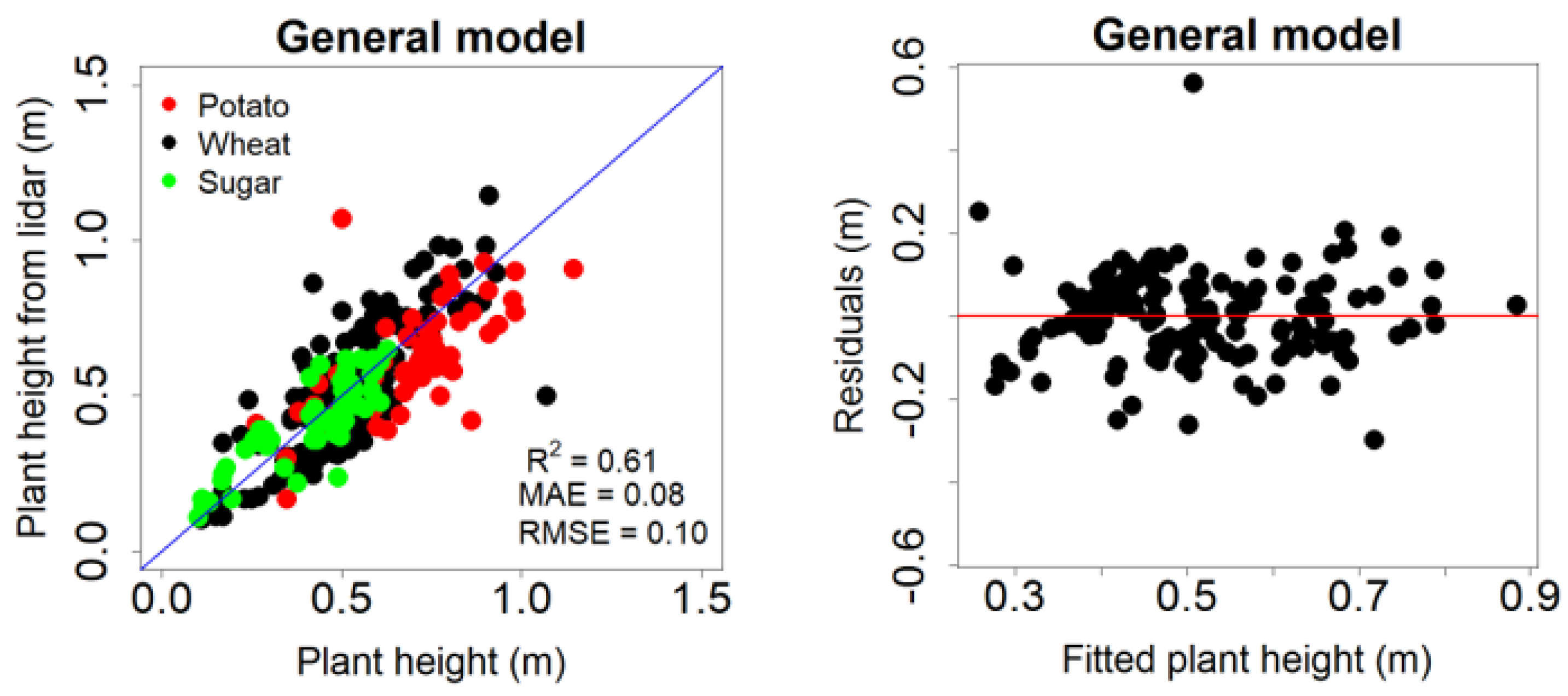
3.2.1. Crop Height
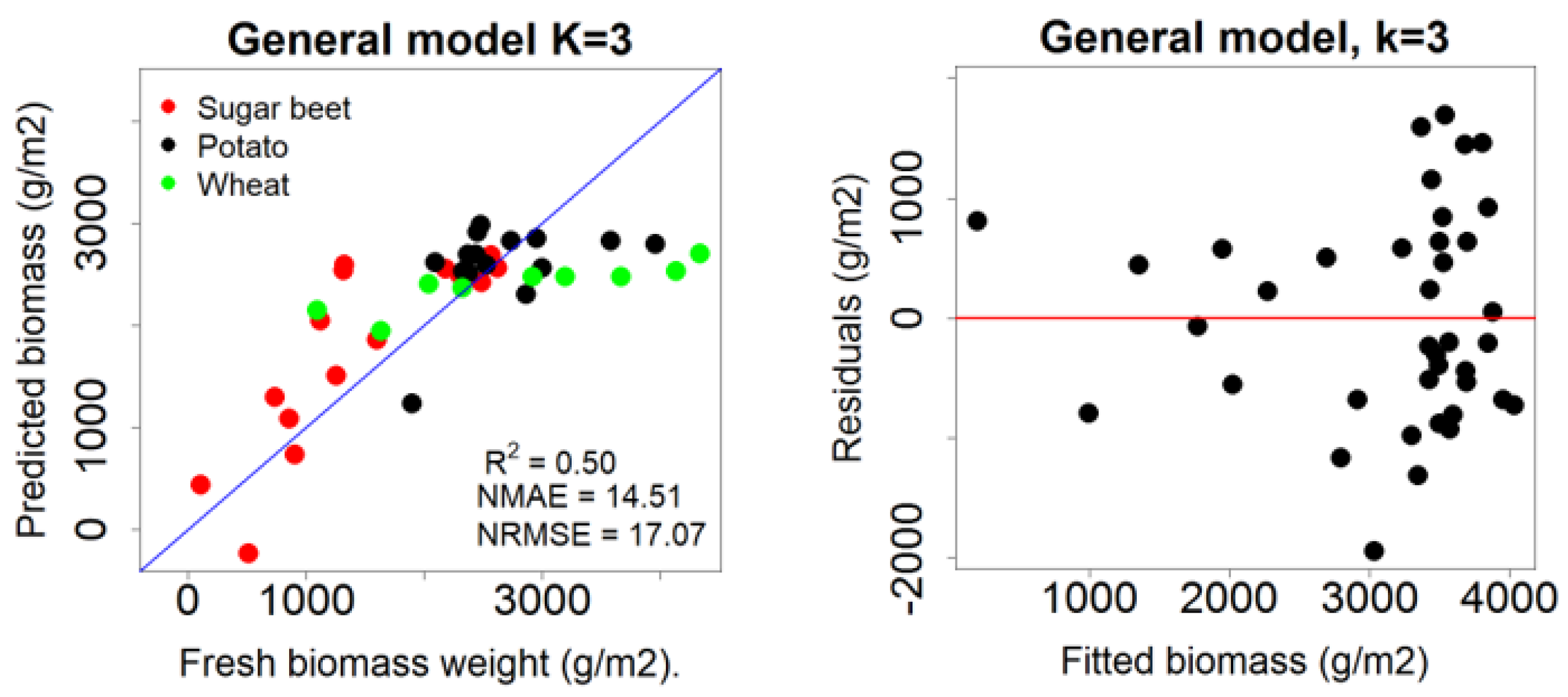
3.2.2. Biomass
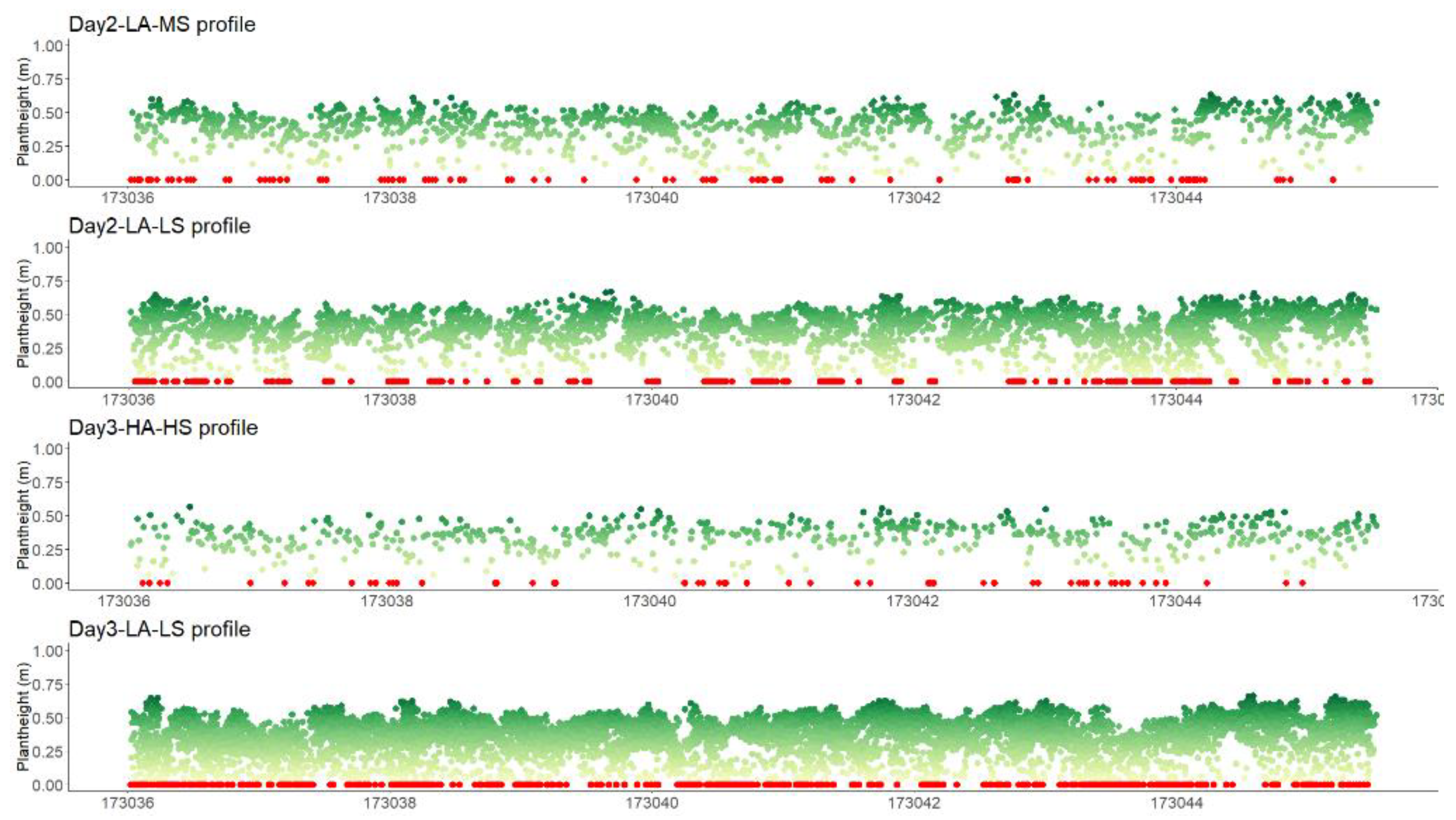
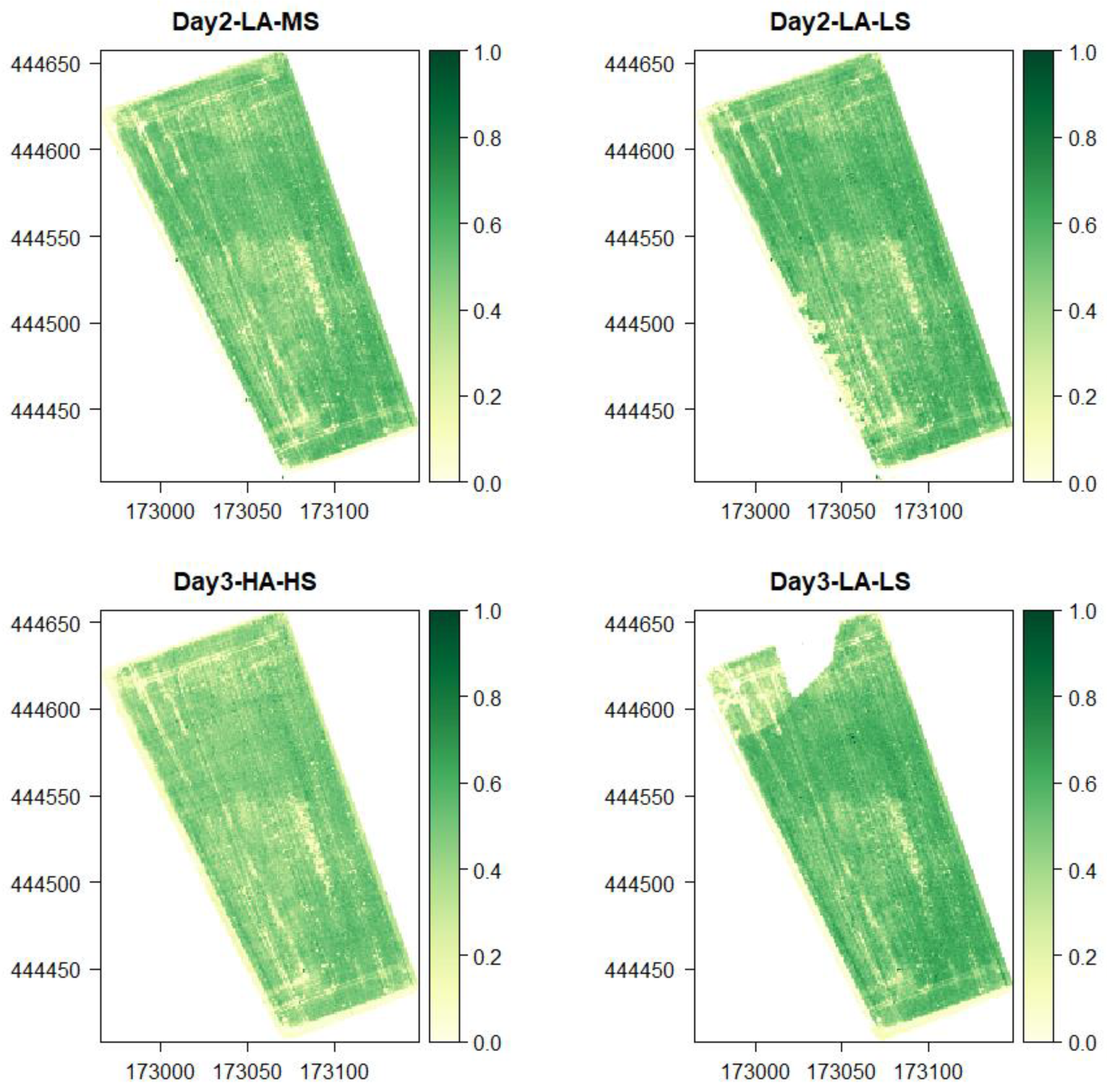
3.3. Influence of Flight Characteristics on Plant Height
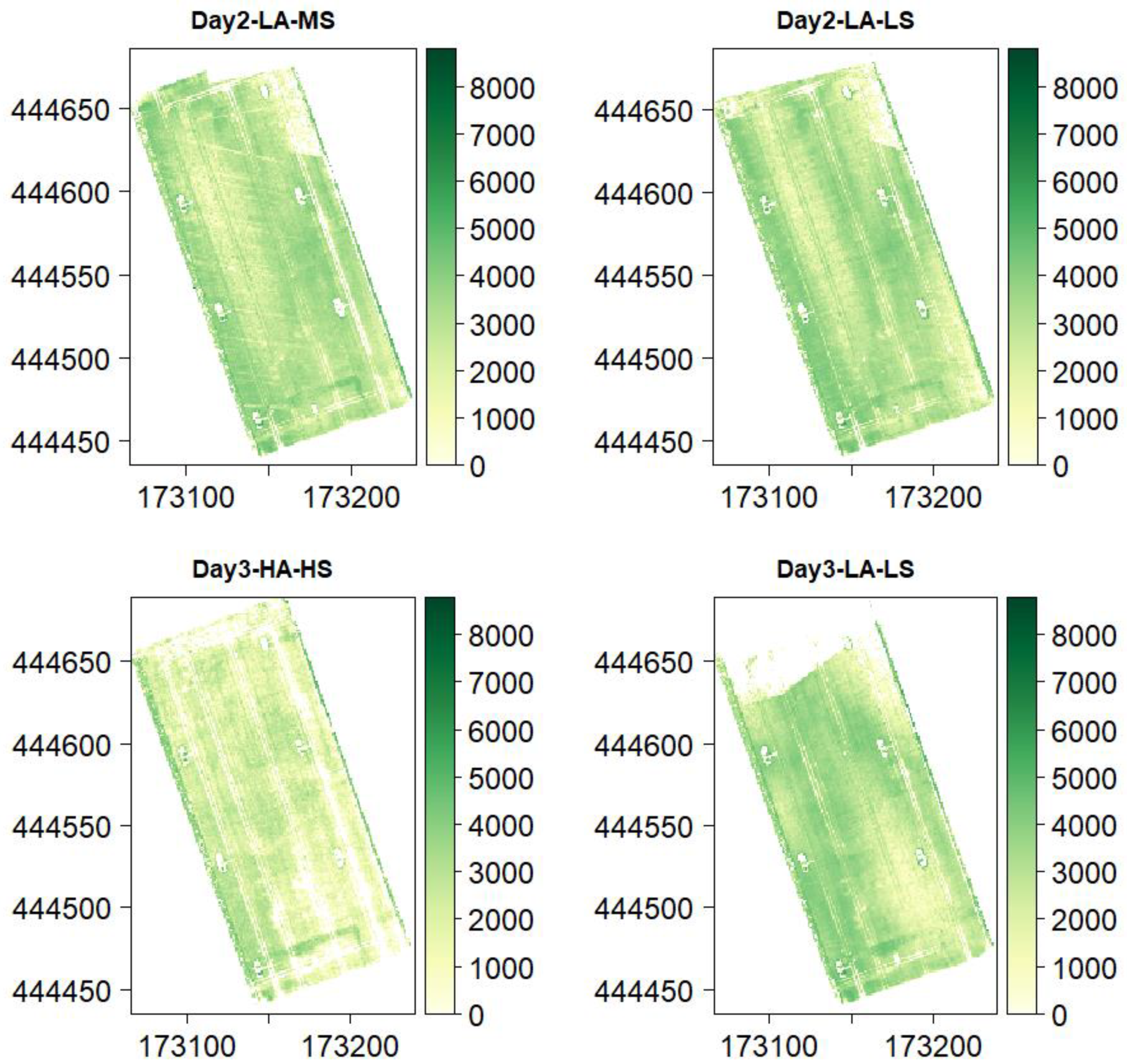
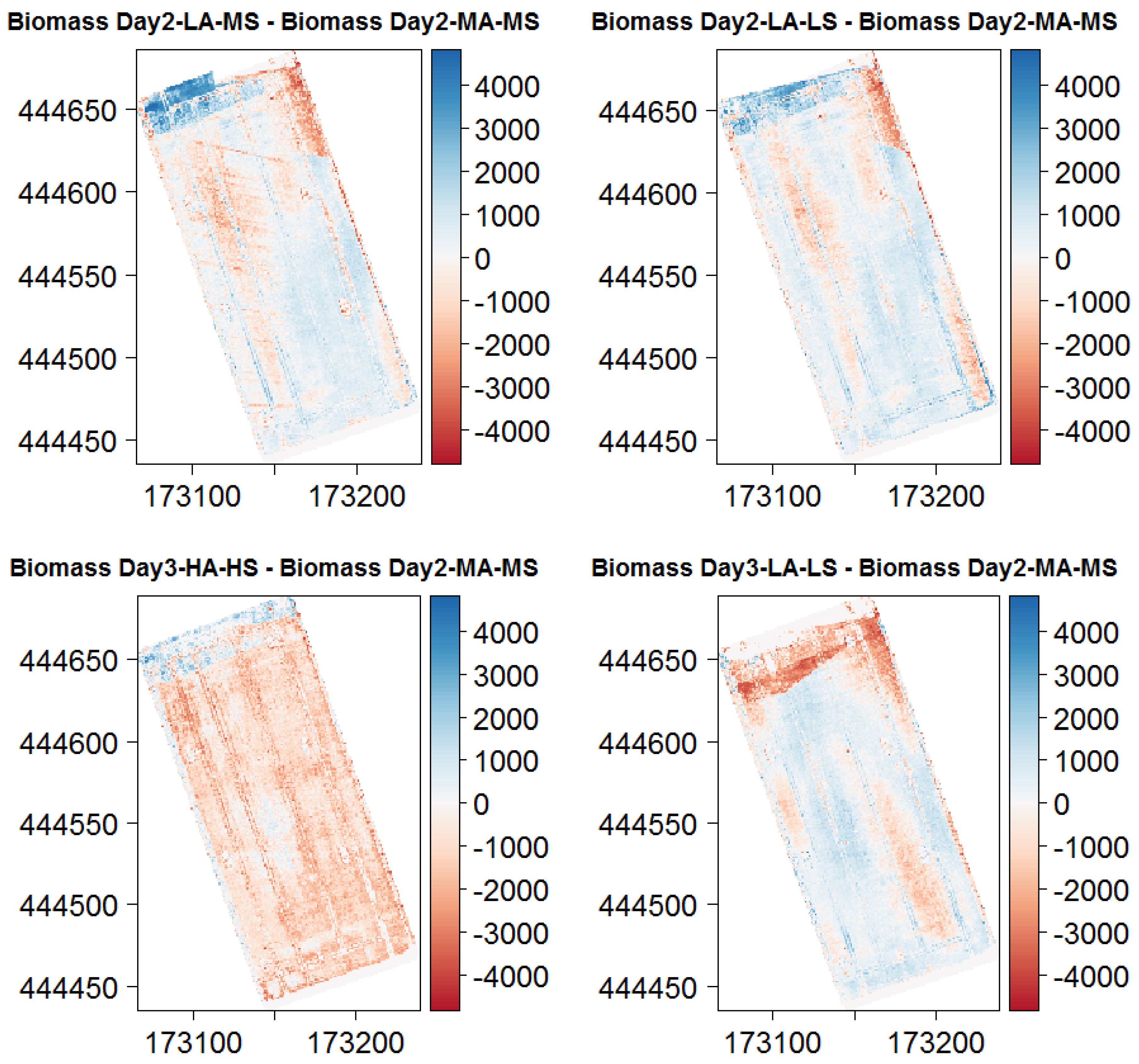
3.4. Influence of Flight Characteristics on Biomass
4. Discussion
4.1. Plant Height
4.2. Biomass
4.3. General Models
4.4. Influence of Flight Altitude and Speed on Biomass and Plant Height Estimation
4.5. Outlook
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Qiu, R.; Wei, S.; Zhang, M.; Li, H.; Sun, H.; Liu, G.; Li, M. Sensors for measuring plant phenotyping: A review. Int. J. Agric. Biol. Eng. 2018, 11, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Jimenez-Berni, J.A.; Deery, D.M.; Rozas-Larraondo, P.; Condon, A.G.; Rebetzke, G.J.; James, R.A.; Bovill, W.D.; Furbank, R.T.; Sirault, X.R.R. High Throughput Determination of Plant Height, Ground Cover, and Above-Ground Biomass in Wheat with LiDAR. Front. Plant Sci. 2018, 9, 237. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, S.; Baret, F.; Abichou, M.; Boudon, F.; Thomas, S.; Zhao, K.; Fournier, C.; Andrieu, B.; Irfan, K.; Hemmerlé, M.; et al. Estimating wheat green area index from ground-based LiDAR measurement using a 3D canopy structure model. Agric. For. Meteorol. 2017, 247, 12–20. [Google Scholar] [CrossRef]
- Sun, S.; Li, C.; Paterson, A.H. In-field high-throughput phenotyping of cotton plant height using LiDAR. Remote Sens. 2017, 9, 377. [Google Scholar] [CrossRef] [Green Version]
- Hui, F.; Zhu, J.; Hu, P.; Meng, L.; Zhu, B.; Guo, Y.; Li, B.; Ma, Y. Image-based dynamic quantification and high-accuracy 3D evaluation of canopy structure of plant populations. Ann. Bot. 2018, 121, 1079–1088. [Google Scholar] [CrossRef]
- Thapa, S.; Zhu, F.; Walia, H.; Yu, H.; Ge, Y. A Novel LiDAR-Based Instrument for High-Throughput, 3D Measurement of Morphological Traits in Maize and Sorghum. Sensors 2018, 18, 1187. [Google Scholar] [CrossRef] [Green Version]
- Madec, S.; Baret, F.; de Solan, B.; Thomas, S.; Dutartre, D.; Jezequel, S.; Hemmerlé, M.; Colombeau, G.; Comar, A. High-Throughput Phenotyping of Plant Height: Comparing Unmanned Aerial Vehicles and Ground LiDAR Estimates. Front. Plant Sci. 2017, 8, 2002. [Google Scholar] [CrossRef] [Green Version]
- Gnyp, M.; Panitzki, M.; Reusch, S.; Jasper, J.; Bolten, A.; Bareth, G. Comparison between tractor-based and UAV-based spectrometer measurements in winter wheat. In Proceedings of the 13th International Conference on Precision Agriculture, St. Louis, MS, USA, 31 July–3 August 2016. [Google Scholar]
- Naderi-Boldaji, M.; Kazemzadeh, A.; Hemmat, A.; Rostami, S.; Keller, T. Changes in soil stress during repeated wheeling: A comparison of measured and simulated values. Soil Res. 2018, 56, 204–214. [Google Scholar] [CrossRef]
- Bendig, J.; Bolten, A.; Bennertz, S.; Broscheit, J.; Eichfuss, S.; Bareth, G. Estimating Biomass of Barley Using Crop Surface Models (CSMs) Derived from UAV-Based RGB Imaging. Remote Sens. 2014, 6, 10395–10412. [Google Scholar] [CrossRef] [Green Version]
- Richardson, J.J.; Moskal, L.M.; Kim, S.-H. Modeling approaches to estimate effective leaf area index from aerial discrete-return LIDAR. Agric. For. Meteorol. 2009, 149, 1152–1160. [Google Scholar] [CrossRef]
- Li, W.; Niu, Z.; Huang, N.; Wang, C.; Gao, S.; Wu, C. Airborne LiDAR technique for estimating biomass components of maize: A case study in Zhangye City, Northwest China. Ecol. Indic. 2015, 57, 486–496. [Google Scholar] [CrossRef]
- Krasilnikov, P.; Ibánez, J.; Arnold, R.; Shoba, S. A Handbook of Soil Terminology, Correlation and Classification; Routledge: Abingdon, UK, 2009. [Google Scholar]
- Tackenberg, O. A New Method for Non-destructive Measurement of Biomass, Growth Rates, Vertical Biomass Distribution and Dry Matter Content Based on Digital Image Analysis. Ann. Bot. 2007, 99, 777–783. [Google Scholar] [CrossRef] [PubMed]
- Brede, B.; Lau, A.; Bartholomeus, H.M.; Kooistra, L. Comparing RIEGL RiCOPTER UAV LiDAR derived canopy height and DBH with terrestrial LiDAR. Sensors 2017, 17, 2371. [Google Scholar] [CrossRef] [PubMed]
- Mock, W.B.T. Pareto Optimality. In Encyclopedia of Global Justice; Chatterjee, D.K., Ed.; Springer: Dordrecht, The Netherlands, 2011; pp. 808–809. [Google Scholar] [CrossRef]
- Holman, F.H.; Riche, A.B.; Michalski, A.; Castle, M.; Wooster, M.J.; Hawkesford, M.J. High Throughput Field Phenotyping of Wheat Plant Height and Growth Rate in Field Plot Trials Using UAV Based Remote Sensing. Remote Sens. 2016, 8, 1031. [Google Scholar] [CrossRef]
- Eitel, J.U.H.; Magney, T.S.; Vierling, L.A.; Brown, T.T.; Huggins, D.R. LiDAR based biomass and crop nitrogen estimates for rapid, non-destructive assessment of wheat nitrogen status. Field Crop. Res. 2014, 159, 21–32. [Google Scholar] [CrossRef]
- Harcha, C.I.; Calderini, D.F. Dry matter and water dynamics of wheat grains in response to source reduction at different phases of grain filling. Chil. J. Agric. Res. 2014, 74, 380–390. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Wang, T.; Skidmore, A.K.; Darvishzadeh, R.; Niemann, K.O.; Liu, J. Canopy leaf water content estimated using terrestrial LiDAR. Agric. For. Meteorol. 2017, 232, 152–162. [Google Scholar] [CrossRef]
- Luo, S.; Chen, J.M.; Wang, C.; Xi, X.; Zeng, H.; Peng, D.; Li, D. Effects of LiDAR point density, sampling size and height threshold on estimation accuracy of crop biophysical parameters. Opt. Express 2016, 24, 11578–11593. [Google Scholar] [CrossRef]
- Ma, J.; Li, Y.; Chen, Y.; Du, K.; Zheng, F.; Zhang, L.; Sun, Z. Estimating above ground biomass of winter wheat at early growth stages using digital images and deep convolutional neural network. Eur. J. Agron. 2019, 103, 117–129. [Google Scholar] [CrossRef]
- Han, L.; Yang, G.; Dai, H.; Xu, B.; Yang, H.; Feng, H.; Li, Z.; Yang, X. Modeling maize above-ground biomass based on machine learning approaches using UAV remote-sensing data. Plant Methods 2019, 15, 10. [Google Scholar] [CrossRef] [Green Version]
- Sofonia, J.J.; Phinn, S.; Roelfsema, C.; Kendoul, F.; Rist, Y. Modelling the effects of fundamental UAV flight parameters on LiDAR point clouds to facilitate objectives-based planning. ISPRS J. Photogramm. Remote Sens. 2019, 149, 105–118. [Google Scholar] [CrossRef]
- Yang, G.; Liu, J.; Zhao, C.; Li, Z.; Huang, Y.; Yu, H.; Xu, B.; Yang, X.; Zhu, D.; Zhang, X.; et al. Unmanned aerial vehicle remote sensing for field-based crop phenotyping: Current status and perspectives. Front. Plant Sci. 2017, 8, 1111. [Google Scholar] [CrossRef] [PubMed]
- Roitsch, T.; Cabrera-Bosquet, L.; Fournier, A.; Ghamkhar, K.; Jiménez-Berni, J.; Pinto, F.; Ober, E.S. Review: New sensors and data-driven approaches—A path to next generation phenomics. Plant Sci. 2019, 282, 2–10. [Google Scholar] [CrossRef] [PubMed]
- Ravi, R.; Lin, Y.; Shamseldin, T.; Elbahnasawy, M.; Crawford, M.; Habib, A. Implementation of UAV-Based Lidar for High Throughput Phenotyping. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 8761–8764. [Google Scholar] [CrossRef]
- Song, Y.; Wang, J. Winter Wheat Canopy Height Extraction from UAV-Based Point Cloud Data with a Moving Cuboid Filter. Remote Sens. 2019, 11, 1239. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Crop Type | Sugar Beet | Potato | Winter Wheat |
|---|---|---|---|
| Fieldname | Dijkgraaf | Com02 | Braam |
| Planting month | April 2018 | April 2018 | October 2017 |
| Harvesting month | October 2018 | September 2018 | August 2018 |
| Size (hectare) | 1.99 | 2.0 | 1.78 |
| Day | Date of Flight | Sugar Beet | Potato | Winter Wheat |
|---|---|---|---|---|
| 1 | 07-06-2018 | Vegetative | Vegetative/Tuber initiation | Heading |
| 2 | 25-06-2018 | Vegetative | Tuber bulking | Ripening |
| 3 | 27-06-2018 | Vegetative | Tuber bulking | Ripening |
| 4 | 11-07-2018 | Vegetative | Tuber bulking | Ripening |
| Crop | Sampling Date | Plant Height | Biomass Fresh Weight | ||||
|---|---|---|---|---|---|---|---|
| Sample Size | Mean (m) | Standard Deviation (m) | Sample Size | Mean (g/m2) | Standard Deviation (g/m2) | ||
| Potato | 07 June 2018 | 21 | 0.599 | 0.073 | 5 | 3364.93 | 461.65 |
| 25 June 2018 | 20 | 0.690 | 0.229 | 5 | 3546.40 | 846.19 | |
| 11 July 2018 | 20 | 0.547 | 0.151 | 5 | 3749.07 | 889.75 | |
| Sugar beet | 07 June 2018 | 16 | 0.275 | 0.098 | 5 | 1237.55 | 650.85 |
| 25 June 2018 | 20 | 0.501 | 0.099 | 5 | 3834.40 | 1374.40 | |
| 11 July 2018 | 15 | 0.445 | 0.105 | 5 | 3656.00 | 1191.38 | |
| Winter wheat | 07 June 2018 | 17 | 0.483 | 0.063 | 3 | 3477.37 | 751.71 |
| 25 June 2018 | 14 | 0.489 | 0.076 | 3 | 3371.67 | 940.45 | |
| 11 July 2018 | 20 | 0.449 | 0.076 | 3 | 1583.00 | 473.11 | |
| Flight Date | Flight Number | Related Field Data | Code | Mean Flying Height (m.a.g.l.) | Mean Flying Speed (m/s) | Number of Flight Lines | Average Point Density (points/m2) | ||
|---|---|---|---|---|---|---|---|---|---|
| Wheat | Potato | Sugar Beet | |||||||
| 07-6-2018 | 1 | 07-6-2018 | Day1-MA-MS | 41.84 | 5.85 | 11 | 997 | 833 | 933 |
| 25-6-2018 | 1 | 25-6-2018 | Day2-MA-MS | 45.32 | 5.88 | 9 | 960 | 777 | 664 |
| 25-6-2018 | 2 | 25-6-2018 | Day2-LA-MS | 24.16 | 4.17 | 7 | 1516 | 659 | 805 |
| 25-6-2018 | 3 | 25-6-2018 | Day2-LA-LS | 20.05 | 2.73 | 5 | 2755 | 1402 | 1262 |
| 27-6-2018 | 1 | 25-6-2018 | Day3-HA-HS | 92.68 | 7.39 | 11 | 575 | 446 | 432 |
| 27-6-2018 | 2 | 25-6-2018 | Day3-LA-LS | 22.71 | 2.93 | 9 | 2257 | 2097 | 804 |
| 11-7-2018 | 1 | 11-7-2018 | Day4-MA-MS | 42.14 | 5.78 | 11 | 1011 | 873 | 1003 |
| Flight | Plant Height (m) | Biomass (g/m2) | ||||||
|---|---|---|---|---|---|---|---|---|
| Data | Difference | Data | Difference | |||||
| Mean | SD | Mean | SD | Mean | SD | Mean | SD | |
| Day1-MA-MS | 0.186 | 0.096 | nd | nd | 2181.38 | 1182.68 | nd | nd |
| Day2-MA-MS | 0.443 | 0.153 | nd | nd | 2479.68 | 1133.56 | nd | nd |
| Day2-LA-MS | 0.445 | 0.149 | 0.002 | 0.050 | 2603.81 | 1164.33 | 96.80 | 1014.95 |
| Day2-LA-LS | 0.466 | 0.160 | 0.022 | 0.085 | 2720.69 | 1157.64 | 202.70 | 929.70 |
| Day3-HA-HS | 0.403 | 0.134 | 0.040 | 0.056 | 1622.14 | 1132.21 | –857.79 | 871.38 |
| Day3-LA-LS | 0.472 | 0.164 | 0.026 | 0.069 | 2435.03 | 1421.60 | –44.97 | 1018.49 |
| Day4-MA-MS | 0.445 | 0.136 | nd | nd | 2164.12 | 1261.95 | nd | nd |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
ten Harkel, J.; Bartholomeus, H.; Kooistra, L. Biomass and Crop Height Estimation of Different Crops Using UAV-Based Lidar. Remote Sens. 2020, 12, 17. https://doi.org/10.3390/rs12010017
ten Harkel J, Bartholomeus H, Kooistra L. Biomass and Crop Height Estimation of Different Crops Using UAV-Based Lidar. Remote Sensing. 2020; 12(1):17. https://doi.org/10.3390/rs12010017
Chicago/Turabian Styleten Harkel, Jelle, Harm Bartholomeus, and Lammert Kooistra. 2020. "Biomass and Crop Height Estimation of Different Crops Using UAV-Based Lidar" Remote Sensing 12, no. 1: 17. https://doi.org/10.3390/rs12010017
APA Styleten Harkel, J., Bartholomeus, H., & Kooistra, L. (2020). Biomass and Crop Height Estimation of Different Crops Using UAV-Based Lidar. Remote Sensing, 12(1), 17. https://doi.org/10.3390/rs12010017