Description of the UCAR/CU Soil Moisture Product



Abstract
:
1. Introduction
1.1. CYGNSS
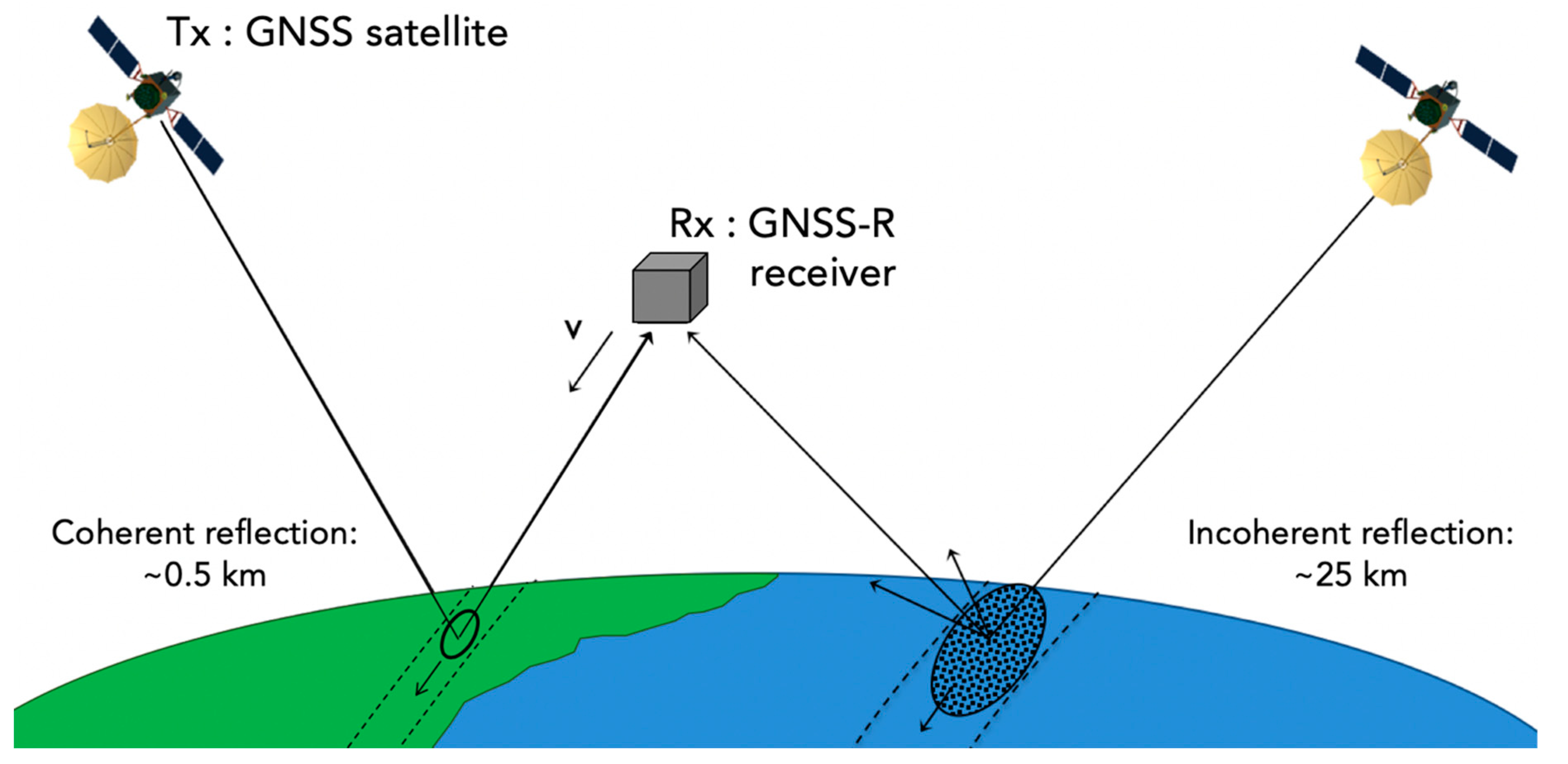
1.2. GNSS-R Background
2. Materials and Methods
2.1. Introduction to the Algorithm
2.2. Algorithm Description
2.2.1. Derivation of Pr,eff
2.2.2. Outlier Identification
2.2.3. Removal of Open Water Observations
2.2.4. Conversion of Pr,eff to Soil Moisture
2.2.5. Daily and Sub-Daily Retrievals
2.2.6. Quality Control
2.2.7. Soil Moisture Retrieval Uncertainty
2.2.8. Quality Flags
- Regions where CYGNSS observations were calibrated to SMAP data where a large portion (>90%) of the SMAP soil moisture retrievals were flagged as “not recommended for retrieval.” These data tend to be in regions that are forested, with significant topography, or near coastlines. Although the overall ubRMSE between CYGNSS retrievals and in-situ observations remains largely unchanged for sites located in these regions, there are fewer instances where the ubRMSE is < 0.04 cm3 cm−3.
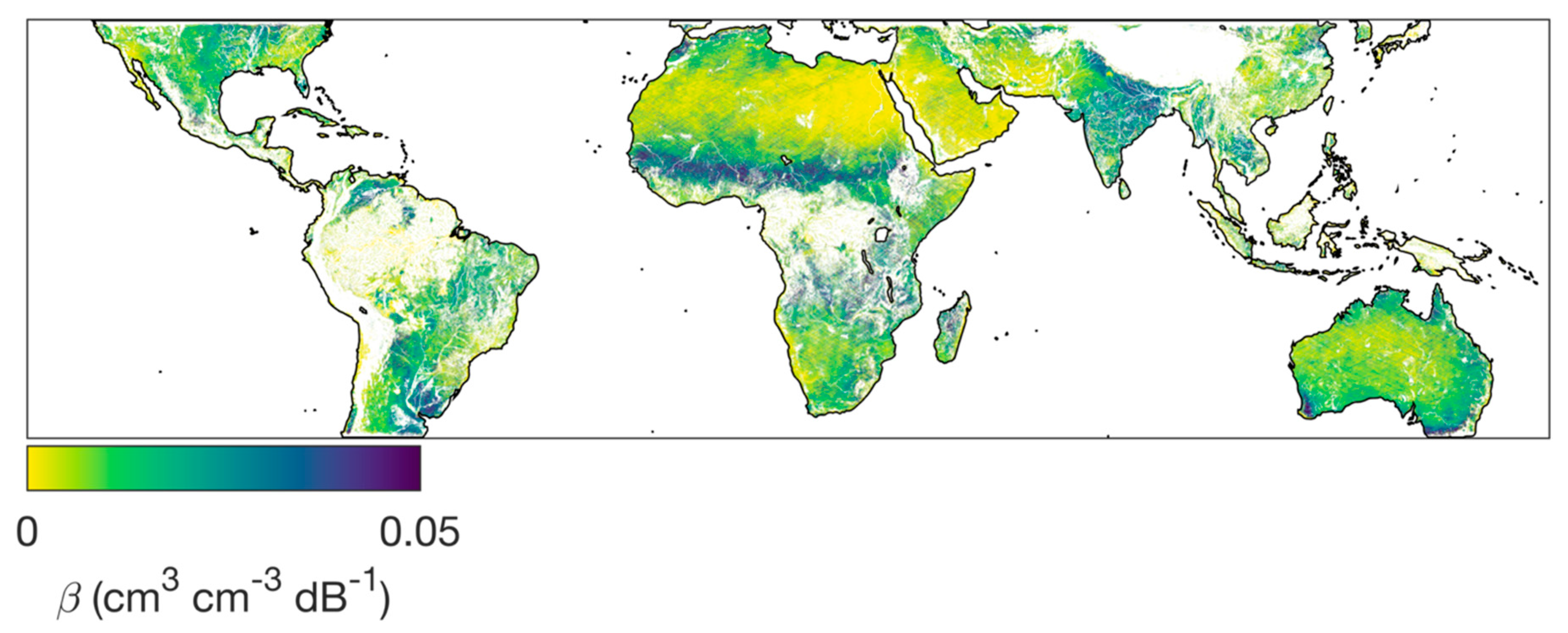
- Regions where CYGNSS was calibrated to SMAP data with a small range of soil moisture values (<0.1 cm3 cm−3). This indicates a larger uncertainty in [28]. The ubRMSE between CYGNSS and in-situ observations in these regions is low (0.0395 cm3 cm−3) due to the fact that there is only small variability in soil moisture. In these regions, because there is a larger uncertainty in , we do not want users to make any interpretations about , or attempt to compare it to modelled sensitivity.
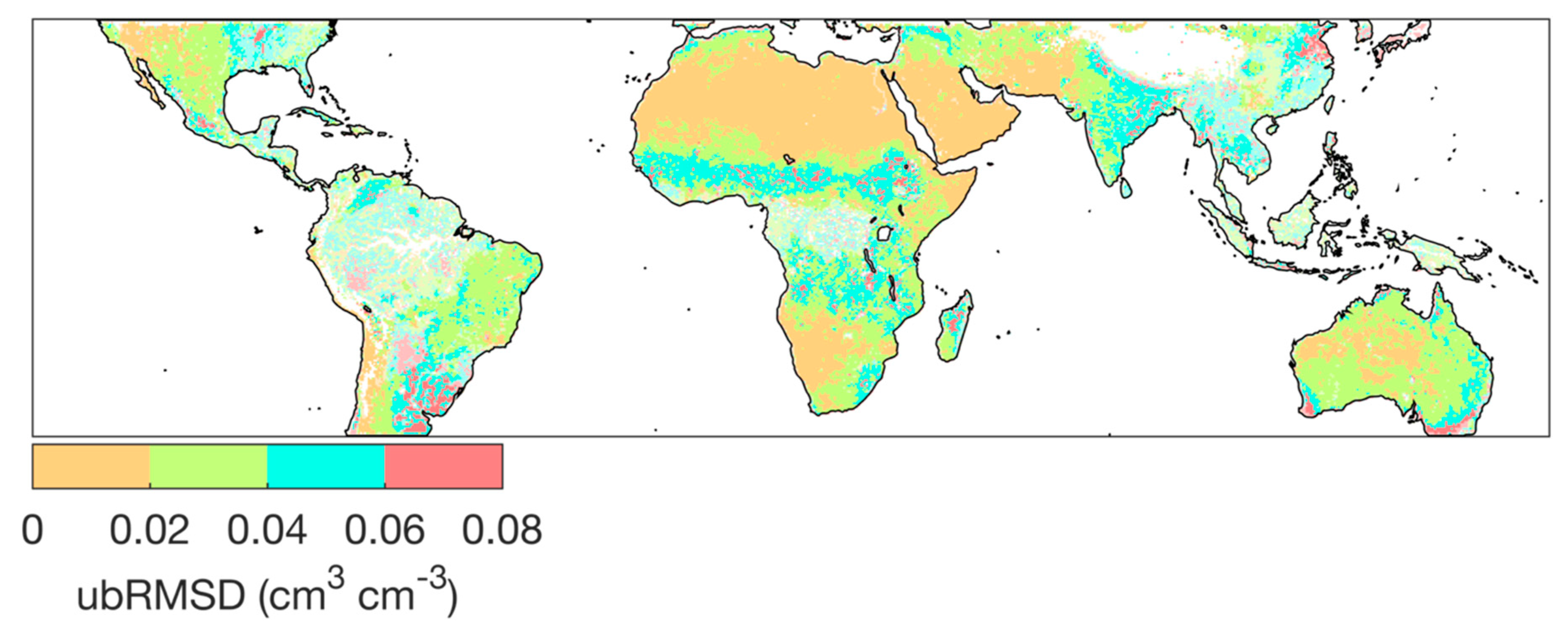
- Regions where the ubRMSD between CYGNSS and SMAP was large for the calibration period (> 0.08 cm3 cm−3). The ubRMSE between CYGNSS and in-situ stations with this condition was higher than average (0.0561 cm3 cm−3). Users are advised to use caution when analysing retrievals from these areas. In-situ stations used for validation are described in the next section.
- Regions with few observations in the 36 km grid cell for calibration, leading to less certain retrievals outside the calibration period (n < 100). is also more uncertain in these regions.
- Regions where is low (<5 dB). There is a higher likelihood that roughness or vegetation effects dominate in these areas. Soil moisture retrievals from these areas are particularly suspect—the ubRMSE between CYGNSS and in-situ observations located in these regions is 0.07 cm3 cm−3. We advise users against using CYGNSS soil moisture retrievals at these locations.
3. Results
4. Discussion
- Errors in SMAP retrievals will propagate into CYGNSS soil moisture retrievals. Because CYGNSS is calibrated using SMAP, any systemic errors in the SMAP retrievals (particularly, persistent bias) will also be present in CYGNSS retrievals. As discussed above, at validation sites with poor SMAP performance, CYGNSS also performs poorly.
- As with all empirical approaches, investigation into the “true” sensitivity to soil moisture is difficult. As mentioned above, unless there is enough soil moisture variability, calculation of is difficult due to noise in the CYGNSS observations. Additionally, if there is variability of within a subcell due to, for example, spatial variations in land cover, then may appear artificially high (i.e., low sensitivity to soil moisture).
- The relationship between and soil moisture may not actually be linear. Although we approximate the relationship as being linear, it may not be—it may appear to be linear either due to noise overwhelming an obvious non-linearity, or it may appear linear because in many regions soil moisture does not often fluctuate between 0.02 cm3 cm−3 and 0.5 cm3 cm−3 or higher, which would be necessary to elucidate significant non-linear relationships. The empirical linear relationships may thus not match those eventually derived from a model and should not be compared.
- The assumption that the sensitivity of to soil moisture does not change over time is likely incorrect. Fluctuations in vegetation water content, particularly in agricultural regions, will likely change , though we currently ignore that possibility.
- Aggregating CYGNSS observations to 36 km does not take advantage of the finer spatial resolution. Any advantages CYGNSS might have vis-à-vis providing higher spatial resolution soil moisture retrievals is not permitted by the approach that we use here. Other approaches using either machine learning methods or models could be successful, if provided with accurate, high-resolution ancillary data.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network | Station | Latitude (deg) | Longitude (deg) | ubRMSE CYGNSS (cm3 cm−3) | ubRMSESMAP (cm3 cm−3) | r CYGNSS | Bias SMAP | # Obs CYGNSS | # Obs SMAP |
|---|---|---|---|---|---|---|---|---|---|
| COSMOS | COSMOS_064 | 35.19 | −102.10 | 0.054 | 0.056 | 0.61 | 0.16 | 182 | 91 |
| COSMOS | COSMOS_101 | −22.68 | −45.00 | 0.033 | 0.022 | 0.06 | −0.08 | 220 | 125 |
| COSMOS | COSMOS_023 | 33.61 | −116.45 | 0.051 | 0.037 | 0.17 | 0.01 | 289 | 167 |
| COSMOS | COSMOS_057 | 29.95 | −98.00 | 0.086 | 0.079 | 0.50 | 0.12 | 269 | 105 |
| COSMOS | COSMOS_067 | 34.26 | −89.87 | 0.042 | 0.050 | 0.50 | −0.19 | 301 | 164 |
| COSMOS | COSMOS_055 | 0.28 | 36.87 | 0.071 | 0.040 | 0.50 | 0.09 | 152 | 88 |
| COSMOS | COSMOS_050 | 0.49 | 36.87 | 0.062 | 0.031 | 0.50 | −0.10 | 113 | 60 |
| COSMOS | COSMOS_034 | 37.07 | −119.19 | 0.129 | 0.087 | 0.34 | −0.03 | 98 | 154 |
| COSMOS | COSMOS_044 | −21.62 | −47.63 | 0.057 | 0.030 | 0.04 | −0.18 | 90 | 57 |
| COSMOS | COSMOS_014 | 36.06 | −97.22 | 0.049 | 0.038 | 0.39 | −0.07 | 237 | 118 |
| COSMOS | COSMOS_033 | 37.03 | −119.26 | 0.053 | 0.041 | 0.31 | −0.07 | 21 | 12 |
| PBOH2O | bkap | 35.29 | −116.08 | 0.016 | 0.016 | 0.20 | 0.01 | 33 | 20 |
| PBOH2O | crrs | 33.07 | −115.74 | 0.077 | 0.069 | -0.01 | −0.10 | 36 | 14 |
| PBOH2O | csci | 34.17 | −119.04 | 0.052 | 0.054 | 0.05 | −0.04 | 33 | 14 |
| PBOH2O | ctdm | 34.52 | −118.61 | 0.034 | 0.023 | −0.14 | 0.09 | 26 | 14 |
| PBOH2O | fgst | 34.73 | −120.01 | 0.046 | 0.034 | 0.03 | 0.05 | 22 | 19 |
| PBOH2O | glrs | 33.27 | −115.52 | 0.032 | 0.084 | −0.04 | −0.18 | 35 | 15 |
| PBOH2O | gnps | 34.31 | −114.19 | 0.022 | 0.010 | 0.38 | −0.02 | 35 | 19 |
| PBOH2O | hunt | 35.88 | −120.40 | 0.020 | 0.013 | 0.33 | −0.02 | 22 | 19 |
| PBOH2O | hvys | 34.44 | −119.19 | 0.036 | 0.079 | 0.00 | −0.30 | 34 | 19 |
| PBOH2O | imps | 34.16 | −115.15 | 0.019 | 0.021 | 0.51 | 0.04 | 34 | 19 |
| PBOH2O | masw | 35.83 | −120.44 | 0.069 | 0.056 | 0.08 | 0.01 | 22 | 19 |
| PBOH2O | ndap | 34.77 | −114.62 | 0.021 | 0.016 | 0.40 | −0.01 | 32 | 17 |
| PBOH2O | p035 | 34.60 | −105.18 | 0.088 | 0.078 | 0.69 | 0.07 | 38 | 19 |
| PBOH2O | p038 | 34.15 | −103.41 | 0.041 | 0.016 | 0.70 | 0.05 | 38 | 15 |
| PBOH2O | p039 | 36.45 | −103.15 | 0.068 | 0.046 | 0.54 | 0.18 | 32 | 16 |
| PBOH2O | p070 | 36.04 | −104.70 | 0.058 | 0.039 | 0.79 | 0.02 | 40 | 19 |
| PBOH2O | p094 | 37.20 | −117.70 | 0.019 | 0.012 | 0.27 | 0.04 | 21 | 15 |
| PBOH2O | p107 | 35.13 | −107.88 | 0.050 | 0.043 | 0.40 | 0.05 | 30 | 19 |
| PBOH2O | p123 | 36.64 | −105.91 | 0.052 | 0.055 | 0.52 | 0.04 | 30 | 16 |
| PBOH2O | p250 | 36.95 | −121.27 | 0.043 | 0.032 | −0.11 | −0.05 | 21 | 19 |
| PBOH2O | p284 | 35.93 | −120.91 | 0.030 | 0.024 | −0.04 | 0.00 | 33 | 18 |
| PBOH2O | p288 | 36.14 | −120.88 | 0.018 | 0.019 | 0.26 | −0.01 | 34 | 19 |
| PBOH2O | p472 | 32.89 | −117.10 | 0.039 | 0.027 | −0.03 | −0.01 | 34 | 19 |
| PBOH2O | p474 | 33.36 | −117.25 | 0.055 | 0.035 | −0.14 | −0.01 | 34 | 20 |
| PBOH2O | p475 | 32.67 | −117.24 | 0.040 | 0.079 | −0.11 | −0.15 | 36 | 19 |
| PBOH2O | p498 | 32.90 | −115.57 | 0.015 | 0.025 | 0.14 | −0.08 | 37 | 15 |
| PBOH2O | p505 | 33.42 | −115.69 | 0.048 | 0.083 | 0.07 | −0.11 | 27 | 12 |
| PBOH2O | p508 | 33.25 | −115.43 | 0.036 | 0.081 | −0.21 | −0.19 | 35 | 15 |
| PBOH2O | p511 | 33.89 | −115.30 | 0.021 | 0.015 | 0.14 | 0.03 | 34 | 18 |
| PBOH2O | p514 | 35.01 | −120.41 | 0.036 | 0.026 | 0.26 | 0.00 | 36 | 19 |
| PBOH2O | p525 | 35.43 | −120.81 | 0.066 | 0.085 | 0.40 | −0.25 | 25 | 19 |
| PBOH2O | p530 | 35.62 | −120.48 | 0.026 | 0.015 | 0.15 | −0.01 | 22 | 19 |
| PBOH2O | p532 | 35.63 | −120.27 | 0.024 | 0.015 | 0.26 | −0.01 | 22 | 19 |
| PBOH2O | p536 | 35.28 | −120.03 | 0.024 | 0.023 | 0.02 | 0.04 | 23 | 19 |
| PBOH2O | p537 | 35.32 | −119.94 | 0.013 | 0.013 | 0.19 | 0.01 | 23 | 19 |
| PBOH2O | p538 | 35.53 | −120.11 | 0.033 | 0.020 | 0.18 | 0.03 | 26 | 19 |
| PBOH2O | p553 | 34.84 | −118.88 | 0.022 | 0.028 | 0.33 | 0.04 | 32 | 19 |
| PBOH2O | p565 | 35.74 | −119.24 | 0.014 | 0.020 | −0.02 | −0.04 | 36 | 19 |
| PBOH2O | p568 | 35.25 | −118.13 | 0.020 | 0.013 | −0.01 | 0.02 | 23 | 15 |
| PBOH2O | p569 | 35.38 | −118.12 | 0.018 | 0.020 | 0.10 | 0.02 | 23 | 15 |
| PBOH2O | p591 | 35.15 | −118.02 | 0.012 | 0.008 | 0.19 | 0.00 | 33 | 15 |
| PBOH2O | p742 | 33.50 | −116.60 | 0.035 | 0.021 | −0.11 | −0.02 | 25 | 20 |
| PBOH2O | p807 | 30.49 | −98.82 | 0.056 | 0.069 | 0.68 | 0.01 | 30 | 19 |
| PBOH2O | p811 | 35.15 | −118.02 | 0.014 | 0.012 | 0.02 | −0.01 | 33 | 15 |
| PBOH2O | qcy2 | 36.16 | −121.14 | 0.024 | 0.017 | −0.31 | 0.01 | 31 | 14 |
| PBOH2O | sdhl | 34.26 | −116.28 | 0.038 | 0.010 | 0.41 | 0.01 | 31 | 20 |
| SCAN | AAMU-jtg | 34.78 | −86.55 | 0.045 | 0.044 | 0.69 | −0.13 | 386 | 202 |
| SCAN | AdamsRanch#1 | 34.25 | −105.42 | 0.056 | 0.048 | 0.29 | 0.03 | 365 | 190 |
| SCAN | AllenFarms | 35.07 | −86.90 | 0.065 | 0.063 | 0.70 | 0.02 | 174 | 94 |
| SCAN | BraggFarm | 34.90 | −86.60 | 0.067 | 0.065 | 0.42 | −0.01 | 385 | 202 |
| SCAN | BroadAcres | 32.28 | −86.05 | 0.050 | 0.030 | 0.47 | 0.08 | 75 | 41 |
| SCAN | Charkiln | 36.37 | −115.83 | 0.077 | 0.069 | 0.36 | 0.05 | 364 | 200 |
| SCAN | CochoraRanch | 35.12 | −119.60 | 0.051 | 0.033 | 0.66 | −0.01 | 313 | 199 |
| SCAN | DeathValleyJCT | 36.33 | −116.35 | 0.027 | 0.032 | 0.39 | −0.04 | 285 | 139 |
| SCAN | DesertCenter | 33.80 | −115.31 | 0.023 | 0.028 | 0.28 | 0.00 | 116 | 61 |
| SCAN | Dexter | 36.78 | −89.93 | 0.045 | 0.075 | 0.78 | −0.06 | 389 | 197 |
| SCAN | Essex | 34.67 | −115.17 | 0.042 | 0.031 | 0.46 | −0.03 | 257 | 104 |
| SCAN | FordDryLake | 33.65 | −115.10 | 0.028 | 0.017 | 0.36 | −0.04 | 288 | 148 |
| SCAN | FortReno#1 | 35.55 | −98.02 | 0.060 | 0.051 | 0.78 | 0.08 | 398 | 199 |
| SCAN | GoodwinCreekTimber | 34.23 | −89.90 | 0.064 | 0.031 | 0.62 | −0.10 | 374 | 201 |
| SCAN | GuilarteForest | 18.15 | −66.77 | 0.134 | 0.136 | NaN | −0.16 | 107 | 70 |
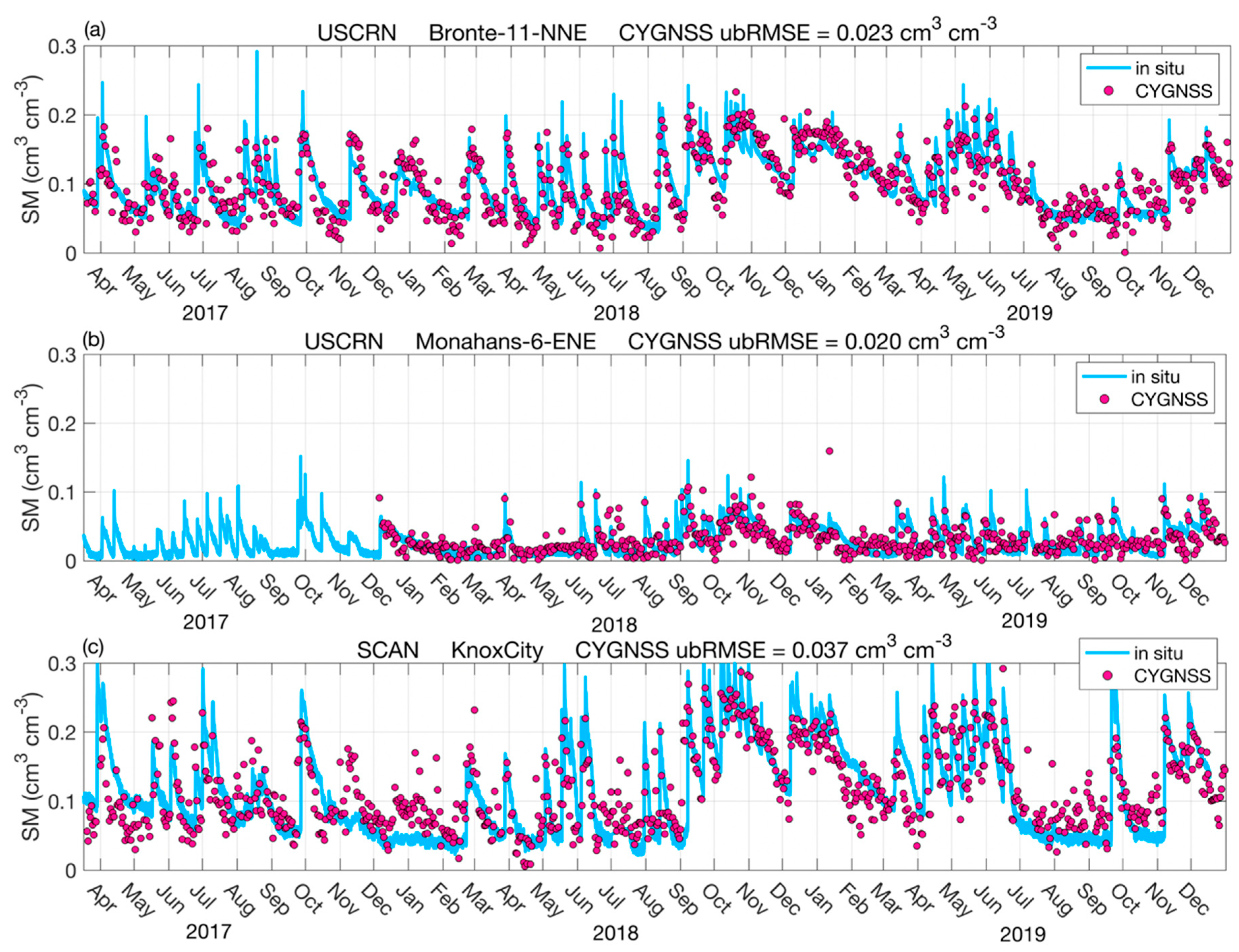
| SCAN | KnoxCity | 33.45 | −99.87 | 0.037 | 0.042 | 0.85 | −0.04 | 385 | 198 |
| SCAN | KoptisFarms | 30.52 | −87.70 | 0.046 | 0.040 | 0.67 | −0.17 | 378 | 202 |
| SCAN | Levelland | 33.55 | −102.37 | 0.042 | 0.058 | 0.28 | −0.01 | 394 | 200 |
| SCAN | LittleRiver | 31.50 | −83.55 | 0.039 | 0.032 | 0.18 | −0.10 | 154 | 83 |
| SCAN | LosLunasPmc | 34.77 | −106.77 | 0.046 | 0.050 | 0.23 | 0.05 | 399 | 187 |
| SCAN | LovellSummit | 36.17 | −115.62 | 0.090 | 0.087 | 0.31 | 0.06 | 310 | 200 |
| SCAN | MammothCave | 37.18 | −86.03 | 0.065 | 0.045 | 0.64 | −0.05 | 298 | 200 |
| SCAN | MaricaoForest | 18.15 | −67.00 | 0.049 | 0.051 | NaN | −0.18 | 310 | 151 |
| SCAN | Mayday | 32.87 | −90.52 | 0.139 | 0.128 | 0.73 | 0.03 | 333 | 201 |
| SCAN | McalisterFarm | 35.07 | −86.58 | 0.079 | 0.059 | 0.74 | 0.00 | 387 | 202 |
| SCAN | MccrackenMesa | 37.45 | −109.33 | 0.061 | 0.051 | 0.43 | 0.08 | 35 | 181 |
| SCAN | MonoclineRidge | 36.54 | −120.55 | 0.095 | 0.067 | 0.64 | −0.02 | 357 | 199 |
| SCAN | MorrisFarms | 32.42 | −85.92 | 0.055 | 0.043 | 0.55 | −0.03 | 378 | 202 |
| SCAN | MtVernon | 37.07 | −93.88 | 0.038 | 0.050 | 0.52 | 0.01 | 297 | 197 |
| SCAN | NorthIssaquena | 33.00 | −91.07 | 0.051 | 0.063 | 0.41 | −0.03 | 397 | 155 |
| SCAN | Onward | 32.75 | −90.93 | 0.048 | 0.041 | 0.17 | −0.08 | 169 | 176 |
| SCAN | PeeDee | 34.30 | −79.73 | 0.039 | 0.049 | 0.63 | −0.11 | 267 | 133 |
| SCAN | PerdidoRivFarms | 31.12 | −87.55 | 0.059 | 0.042 | 0.73 | −0.04 | 392 | 202 |
| SCAN | PineNut | 36.57 | −115.20 | 0.058 | 0.051 | 0.24 | 0.00 | 273 | 171 |
| SCAN | Riesel | 31.48 | −96.88 | 0.110 | 0.088 | 0.70 | 0.03 | 164 | 76 |
| SCAN | RiverRoadFarms | 31.02 | −85.03 | 0.040 | 0.044 | 0.62 | −0.13 | 291 | 149 |
| SCAN | SanAngelo | 31.55 | −100.51 | 0.073 | 0.066 | 0.60 | 0.07 | 387 | 152 |
| SCAN | SandHollow | 37.10 | −113.35 | 0.031 | 0.025 | 0.50 | −0.06 | 258 | 190 |
| SCAN | SandyRidge | 33.67 | −90.57 | 0.048 | 0.070 | 0.66 | −0.17 | 371 | 201 |
| SCAN | Scott | 33.62 | −91.10 | 0.039 | 0.057 | 0.70 | 0.00 | 388 | 151 |
| SCAN | SellersLake#1 | 29.10 | −81.63 | 0.031 | 0.048 | 0.04 | −0.39 | 351 | 202 |
| SCAN | Sevilleta | 34.35 | −106.68 | 0.040 | 0.033 | 0.36 | 0.00 | 223 | 100 |
| SCAN | SilverCity | 33.08 | −90.52 | 0.049 | 0.041 | 0.68 | −0.11 | 333 | 201 |
| SCAN | StanleyFarm | 34.43 | −86.68 | 0.084 | 0.052 | 0.74 | 0.04 | 394 | 202 |
| SCAN | Starkville | 33.63 | −88.77 | 0.040 | 0.030 | 0.67 | 0.04 | 396 | 200 |
| SCAN | Stephenville | 32.25 | −98.20 | 0.076 | 0.048 | 0.74 | 0.02 | 400 | 159 |
| SCAN | Stubblefield | 34.97 | −119.48 | 0.076 | 0.050 | 0.39 | 0.05 | 144 | 113 |
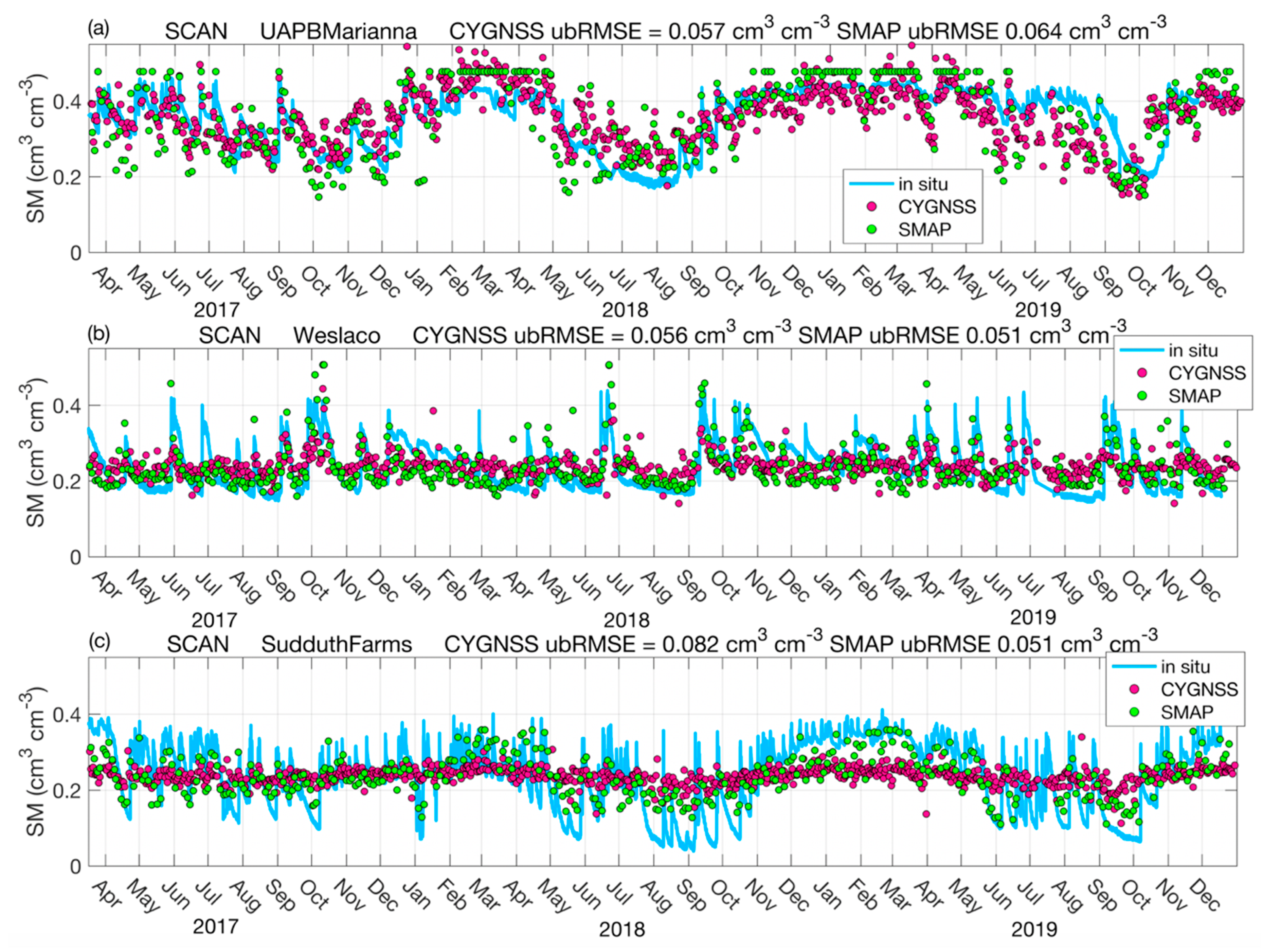
| SCAN | SudduthFarms | 34.18 | −87.45 | 0.082 | 0.051 | 0.53 | −0.06 | 389 | 156 |
| SCAN | Tidewater#1 | 35.87 | −76.65 | 0.078 | 0.072 | −0.05 | −0.18 | 221 | 125 |
| SCAN | TidewaterArec | 36.68 | −76.77 | 0.054 | 0.043 | 0.72 | 0.00 | 228 | 129 |
| SCAN | Tuskegee | 32.43 | −85.75 | 0.061 | 0.049 | 0.43 | −0.27 | 389 | 163 |
| SCAN | UAPBDewitt | 34.28 | −91.35 | 0.061 | 0.039 | 0.67 | −0.08 | 256 | 186 |
| SCAN | UAPBLonokeFarm | 34.85 | −91.88 | 0.046 | 0.037 | 0.73 | −0.02 | 381 | 202 |
| SCAN | UAPBMarianna | 34.78 | −90.82 | 0.057 | 0.064 | 0.65 | 0.03 | 384 | 151 |
| SCAN | UAPBPointRemove | 35.22 | −92.92 | 0.040 | 0.038 | 0.37 | −0.07 | 241 | 130 |
| SCAN | Uvalde | 29.36 | −100.25 | 0.058 | 0.052 | 0.56 | 0.04 | 385 | 202 |
| SCAN | WTARS | 34.90 | −86.53 | 0.046 | 0.030 | 0.80 | 0.02 | 87 | 44 |
| SCAN | Wakulla#1 | 30.30 | −84.42 | 0.021 | 0.030 | 0.42 | −0.43 | 381 | 204 |
| SCAN | WalnutGulch#1 | 31.73 | −110.05 | 0.043 | 0.036 | 0.60 | 0.00 | 395 | 147 |
| SCAN | Watkinsville#1 | 33.88 | −83.43 | 0.082 | 0.040 | 0.33 | −0.05 | 274 | 132 |
| SCAN | Wedowee | 33.33 | −85.52 | 0.053 | 0.035 | 0.21 | −0.22 | 349 | 141 |
| SCAN | Weslaco | 26.16 | −97.96 | 0.056 | 0.051 | 0.34 | 0.04 | 335 | 198 |
| SCAN | YoumansFarm | 32.67 | −81.20 | 0.040 | 0.051 | 0.53 | −0.16 | 391 | 201 |
| SNOTEL | BRISTLECONETRAIL | 36.32 | −115.70 | 0.117 | 0.117 | 0.01 | 0.09 | 361 | 188 |
| SNOTEL | BarM | 34.86 | −111.61 | 0.067 | 0.052 | 0.50 | 0.14 | 310 | 159 |
| SNOTEL | ElkCabin | 35.70 | −105.81 | 0.082 | 0.074 | 0.30 | −0.03 | 239 | 129 |
| SNOTEL | LEECANYON | 36.31 | −115.68 | 0.082 | 0.080 | 0.08 | 0.06 | 361 | 188 |
| SNOTEL | MormonMountain | 34.94 | −111.52 | 0.115 | 0.118 | 0.45 | 0.09 | 310 | 159 |
| SNOTEL | NAVAJOWHISKEYCK | 36.18 | −108.95 | 0.110 | 0.074 | 0.11 | 0.21 | 283 | 109 |
| SNOTEL | PALO | 36.41 | −105.33 | 0.085 | 0.093 | 0.06 | −0.06 | 333 | 111 |
| SNOTEL | RAINBOWCANYON | 36.25 | −115.63 | 0.099 | 0.094 | 0.11 | 0.04 | 361 | 188 |
| SNOTEL | SantaFe | 35.77 | −105.78 | 0.089 | 0.089 | 0.07 | 0.03 | 239 | 129 |
| SNOTEL | TresRitos | 36.13 | −105.53 | 0.098 | 0.082 | −0.03 | 0.03 | 122 | 109 |
| SNOTEL | VacasLocas | 36.03 | −106.81 | 0.082 | 0.081 | 0.31 | 0.03 | 322 | 159 |
| USCRN | Asheville-13-S | 35.42 | −82.56 | 0.092 | 0.068 | 0.33 | −0.01 | 361 | 192 |
| USCRN | Austin-33-NW | 30.62 | −98.08 | 0.103 | 0.088 | 0.74 | 0.11 | 381 | 147 |
| USCRN | Batesville-8-WNW | 35.82 | −91.78 | 0.048 | 0.044 | 0.65 | −0.07 | 395 | 198 |
| USCRN | Blackville-3-W | 33.36 | −81.33 | 0.049 | 0.032 | 0.62 | −0.11 | 81 | 45 |
| USCRN | Bowling-Green-21-NNE | 37.25 | −86.23 | 0.054 | 0.051 | 0.67 | −0.04 | 248 | 168 |
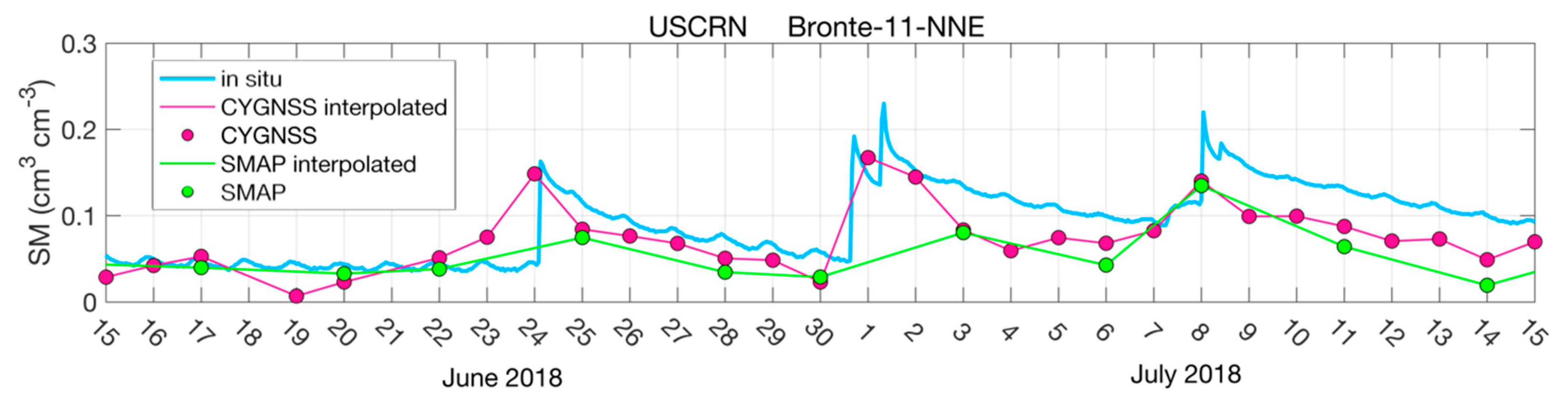
| USCRN | Bronte-11-NNE | 32.04 | −100.25 | 0.023 | 0.036 | 0.86 | −0.07 | 394 | 179 |
| USCRN | Brunswick-23-S | 30.81 | −81.46 | 0.020 | 0.066 | 0.40 | −0.38 | 336 | 193 |
| USCRN | Durham-11-W | 35.97 | −79.09 | 0.097 | 0.058 | 0.45 | −0.11 | 366 | 195 |
| USCRN | Edinburg-17-NNE | 26.53 | −98.06 | 0.030 | 0.033 | 0.42 | 0.00 | 368 | 196 |
| USCRN | Elgin-5-S | 31.59 | −110.51 | 0.033 | 0.028 | 0.72 | −0.03 | 382 | 145 |
| USCRN | Everglades-City-5-NE | 25.90 | −81.32 | 0.059 | 0.058 | 0.16 | −0.13 | 188 | 96 |
| USCRN | Fairhope-3-NE | 30.55 | −87.88 | 0.062 | 0.095 | 0.13 | −0.33 | 267 | 141 |
| USCRN | Fallbrook-5-NE | 33.44 | −117.19 | 0.065 | 0.029 | −0.03 | 0.05 | 355 | 198 |
| USCRN | Gadsden-19-N | 34.29 | −85.96 | 0.057 | 0.036 | 0.72 | −0.12 | 384 | 199 |
| USCRN | Goodwell-2-E | 36.60 | −101.60 | 0.060 | 0.056 | 0.67 | 0.08 | 361 | 193 |
| USCRN | Goodwell-2-SE | 36.57 | −101.61 | 0.064 | 0.059 | 0.66 | 0.14 | 361 | 193 |
| USCRN | Holly-Springs-4-N | 34.82 | −89.43 | 0.039 | 0.044 | 0.72 | 0.07 | 380 | 197 |
| USCRN | Joplin-24-N | 37.43 | −94.58 | 0.081 | 0.076 | 0.24 | 0.04 | 127 | 194 |
| USCRN | Lafayette-13-SE | 30.09 | −91.87 | 0.074 | 0.097 | 0.09 | −0.11 | 351 | 149 |
| USCRN | Las-Cruces-20-N | 32.61 | −106.74 | 0.027 | 0.031 | 0.38 | 0.00 | 382 | 147 |
| USCRN | Los-Alamos-13-W | 35.86 | −106.52 | 0.087 | 0.084 | 0.29 | 0.04 | 23 | 115 |
| USCRN | McClellanville-7-NE | 33.15 | −79.36 | 0.089 | 0.093 | −0.04 | −0.41 | 291 | 149 |
| USCRN | Merced-23-WSW | 37.24 | −120.88 | 0.050 | 0.060 | 0.46 | −0.18 | 285 | 155 |
| USCRN | Mercury-3-SSW | 36.62 | −116.02 | 0.028 | 0.024 | 0.41 | −0.03 | 345 | 198 |
| USCRN | Monahans-6-ENE | 31.62 | −102.81 | 0.020 | 0.023 | 0.56 | −0.03 | 382 | 199 |
| USCRN | Muleshoe-19-S | 33.96 | −102.77 | 0.037 | 0.042 | 0.57 | 0.08 | 383 | 187 |
| USCRN | Newton-5-ENE | 32.34 | −89.07 | 0.067 | 0.047 | 0.57 | −0.09 | 392 | 198 |
| USCRN | Newton-8-W | 31.31 | −84.47 | 0.077 | 0.094 | 0.09 | −0.08 | 369 | 197 |
| USCRN | Panther-Junction-2-N | 29.35 | −103.21 | 0.038 | 0.029 | 0.45 | 0.01 | 347 | 199 |
| USCRN | Socorro-20-N | 34.36 | −106.89 | 0.038 | 0.042 | 0.22 | 0.00 | 368 | 191 |
| USCRN | Stillwater-2-W | 36.12 | −97.09 | 0.092 | 0.069 | 0.47 | 0.09 | 383 | 196 |
| USCRN | Stillwater-5-WNW | 36.13 | −97.11 | 0.073 | 0.047 | 0.49 | 0.03 | 379 | 195 |
| USCRN | Stovepipe-Wells-1-SW | 36.60 | −117.14 | 0.016 | 0.018 | 0.37 | −0.05 | 333 | 198 |
| USCRN | Titusville-7-E | 28.62 | −80.69 | 0.057 | 0.058 | 0.18 | −0.29 | 196 | 123 |
| USCRN | Tucson-11-W | 32.24 | −111.17 | 0.027 | 0.025 | 0.66 | −0.04 | 400 | 196 |
| USCRN | Watkinsville-5-SSE | 33.78 | −83.39 | 0.046 | 0.035 | 0.34 | −0.20 | 345 | 180 |
| USCRN | Williams-35-NNW | 35.76 | −112.34 | 0.050 | 0.048 | 0.66 | 0.00 | 362 | 138 |
| USCRN | Yuma-27-ENE | 32.83 | −114.19 | 0.064 | 0.048 | 0.21 | 0.03 | 123 | 68 |
| OzNet | Yanco | −34.85 | 146.12 | 0.038 | 0.049 | 0.66 | −0.02 | 405 | 200 |
| OzNet | Kyeamba | −35.32 | 147.53 | 0.047 | 0.068 | 0.69 | −0.02 | 224 | 128 |
References
- Oglesby, R.J.; Erickson, D.J. Soil Moisture and the Persistence of North American Drought. J. Clim. 1989, 2, 1362–1380. [Google Scholar] [CrossRef] [Green Version]
- Dai, A.G. Increasing drought under global warming in observations and models. Nat. Clim. Chang. 2013, 3, 52–58. [Google Scholar] [CrossRef]
- Sheffield, J.; Wood, E.F. Global trends and variability in soil moisture and drought characteristics, 1950-2000, from observation-driven simulations of the terrestrial hydrologic cycle. J. Clim. 2008, 21, 432–458. [Google Scholar] [CrossRef] [Green Version]
- Wanders, N.; Karssenberg, D.; De Roo, A.; De Jong, S.M.; Bierkens, M.F.P. The suitability of remotely sensed soil moisture for improving operational flood forecasting. Hydrol. Earth Syst. Sci. 2014, 18, 2343–2357. [Google Scholar] [CrossRef] [Green Version]
- Komma, J.; Blöschl, G.; Reszler, C. Soil moisture updating by Ensemble Kalman Filtering in real-time flood forecasting. J. Hydrol. 2008, 357, 228–242. [Google Scholar] [CrossRef]
- Bisselink, B.; Van Meijgaard, E.; Dolman, A.J.; De Jeu, R.A.M. Initializing a regional climate model with satellite-derived soil moisture. J. Geophys. Res. Atmos. 2011, 116, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Drusch, M. Initializing numerical weather prediction models with satellite-derived surface soil moisture: Data assimilation experiments with ECMWF’s integrated forecast system and the TMI soil moisture data set. J. Geophys. Res. Atmos. 2007, 112, 1–14. [Google Scholar] [CrossRef]
- Hirschi, M.; Seneviratne, S.I.; Alexandrov, V.; Boberg, F.; Boroneant, C.; Christensen, O.B.; Formayer, H.; Orlowsky, B.; Stepanek, P. Observational evidence for soil-moisture impact on hot extremes in southeastern Europe. Nat. Geosci. 2011, 4, 17–21. [Google Scholar] [CrossRef]
- Koster, R.D.; Dirmeyer, P.A.; Guo, Z.; Bonan, G.; Chan, E.; Cox, P.; Gordon, C.T.; Kanae, S.; Kowalczyk, E.; Lawrence, D.; et al. Regions of Strong Coupling Between Soil Moisture and Precipitation. Science 2004, 305, 1138–1140. [Google Scholar] [CrossRef] [Green Version]
- McColl, K.A.; Alemohammad, S.H.; Akbar, R.; Konings, A.G.; Yueh, S.; Entekhabi, D. The global distribution and dynamics of surface soil moisture. Nat. Geosci. 2017, 10, 100–104. [Google Scholar] [CrossRef]
- Brocca, L.; Tarpanelli, A.; Filippucci, P.; Dorigo, W.; Zaussinger, F.; Gruber, A.; Fernandez-Prieto, D. How much water is used for irrigation? A new approach exploiting coarse resolution satellite soil moisture products. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 752–766. [Google Scholar] [CrossRef]
- Mousam, A.; Maggioni, V.; Delamater, P.L.; Quispe, A.M. Using remote sensing and modeling techniques to investigate the annual parasite incidence of malaria in Loreto, Peru. Adv. Water Resour. 2017, 108, 423–438. [Google Scholar] [CrossRef]
- Entekhabi, D.; Njoku, E.G.; Neill, P.E.O.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J.; et al. The Soil Moisture Active Passive (SMAP) Mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Brocca, L.; Moramarco, T.; Melone, F.; Wagner, W. A new method for rainfall estimation through soil moisture observations. Geophys. Res. Lett. 2013, 40, 853–858. [Google Scholar] [CrossRef]
- Brocca, L.; Ciabatta, L.; Massari, C.; Moramarco, T.; Hahn, S.; Hasenauer, S.; Kidd, R.; Dorigo, W.; Wagner, W.; Levizzani, V. Soil as a natural rain gauge: Estimating global rainfall from satellite soil moisture data. J. Geophys. Res. Atmos. 2014, 119, 5128–5141. [Google Scholar] [CrossRef]
- Lu, Y.; Steele-Dunne, S.C.; Farhadi, L.; van de Giesen, N. Mapping Surface Heat Fluxes by Assimilating SMAP Soil Moisture and GOES Land Surface Temperature Data. Water Resour. Res. 2017, 53, 10858–10877. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Bai, Y.; Yan, H.; Guo, H.; Yang, S. Linking observation, modelling and satellite-based estimation of global land evapotranspiration. Big Earth Data 2020. [Google Scholar] [CrossRef]
- Ruf, C.; Gleason, S.; Jelenak, Z.; Katzberg, S.; Ridley, A.; Rose, R.; Scherrer, J.; Zavorotny, V. The CYGNSS nanosatellite constellation hurricane mission. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 214–216. [Google Scholar]
- Chew, C.; Small, E. The UCAR/CU CYGNSS Soil Moisture Product. Available online: https://data.cosmic.ucar.edu/gnss-r/soilMoisture/cygnss/level3/ (accessed on 1 January 2020).
- Kerr, Y.H.; Waldteufel, P.; Richaume, P.; Wigneron, J.P.; Ferrazzoli, P.; Mahmoodi, A.; Al Bitar, A.; Cabot, F.; Gruhier, C.; Juglea, S.E.; et al. The SMOS soil moisture retrieval algorithm. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1384–1403. [Google Scholar] [CrossRef]
- Egido, A.; Paloscia, S.; Motte, E.; Guerriero, L.; Pierdicca, N.; Caparrini, M.; Santi, E.; Fontanelli, G.; Floury, N. Airborne GNSS-R polarimetric measurements for soil moisture and above-ground biomass estimation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 1522–1532. [Google Scholar] [CrossRef]
- Valencia, E.; Camps, A.; Vall-llossera, M.; Monerris, A.; Bosch-Lluis, X.; Rodriguez-Alvarez, N.; Ramos-Perez, I.; Marchan-Hernandez, J.F.; Martínez-Fernández, J.; Sánchez-Martín, N.; et al. GNSS-R Delay-Doppler Maps over land: Preliminary results of the GRAJO field experiment. Int. Geosci. Remote Sens. Symp. 2010, 29, 3805–3808. [Google Scholar] [CrossRef]
- Alonso-Arroyo, A.; Camps, A.; Monerris, A.; Rudiger, C.; Walker, J.P.; Forte, G.; Pascual, D.; Park, H.; Onrubia, R. The light airborne reflectometer for GNSS-R observations (LARGO) instrument: Initial results from airborne and Rover field campaigns. Int. Geosci. Remote Sens. Symp. 2014, 4054–4057. [Google Scholar] [CrossRef]
- Masters, D.; Zavorotny, V.; Katzberg, S.; Emery, W. GPS signal scattering from land for moisture content determination. In Proceedings of the IGARSS 2000 IEEE 2000 International Geoscience and Remote Sensing Symposium. Taking the Pulse of the Planet: The Role of Remote Sensing in Managing the Environment (Cat. No.00CH37120), Honolulu, HI, USA, 24–28 July 2000; Volume 7, pp. 3090–3092. [Google Scholar] [CrossRef]
- Zribi, M.; Motte, E.; Baghdadi, N.; Baup, F.; Dayau, S.; Fanise, P.; Guyon, D.; Huc, M.; Wigneron, J.P. Potential Applications of GNSS-R Observations over Agricultural Areas: Results from the GLORI Airborne Campaign. Remote Sens. 2018, 10, 1245. [Google Scholar] [CrossRef] [Green Version]
- Chew, C.; Shah, R.; Zuffada, C.; Hajj, G.; Masters, D.; Mannucci, A.J. Demonstrating soil moisture remote sensing with observations from the UK TechDemoSat-1 satellite mission. Geophys. Res. Lett. 2016, 43. [Google Scholar] [CrossRef] [Green Version]
- Camps, A.; Park, H.; Pablos, M.; Foti, G.; Gommenginger, C.P. Sensitivity of GNSS-R Spaceborne Observations to Soil Moisture and Vegetation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4730–4742. [Google Scholar] [CrossRef] [Green Version]
- Chew, C.; Small, E. Soil Moisture Sensing Using Spaceborne GNSS Reflections: Comparison of CYGNSS Reflectivity to SMAP Soil Moisture. Geophys. Res. Lett. 2018, 45, 4049–4057. [Google Scholar] [CrossRef] [Green Version]
- Al-Khaldi, M.M.; Johnson, J.; O’Brien, A.; Balenzano, A.; Mattia, F. Time-Series Retrieval of Soil Moisture Using CYGNSS. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4322–4331. [Google Scholar] [CrossRef]
- Clarizia, M.P.; Pierdicca, N.; Costantini, F.; Floury, N. Analysis of CYGNSS data for soil moisture retrieval. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 2227–2235. [Google Scholar] [CrossRef]
- Calabia, A.; Molina, I.; Jin, S. Soil Moisture Content from GNSS Reflectometry Using Dielectric Permittivity from Fresnel Reflection Coefficients. Remote Sens. 2020, 12, 122. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.; Lakshmi, V. Use of Cyclone Global Navigation Satellite System (CyGNSS) Observations for Estimation of Soil Moisture. Geophys. Res. Lett. 2018, 45, 8272–8282. [Google Scholar] [CrossRef] [Green Version]
- Eroglu, O.; Kurum, M.; Boyd, D.; Gurbuz, A.C. High spatio-temporal resolution cygnss soil moisture estimates using artificial neural networks. Remote Sens. 2019, 11, 2272. [Google Scholar] [CrossRef] [Green Version]
- Senyurek, V.; Lei, F.; Boyd, D.; Kurum, M.; Gurbuz, A.C.; Moorhead, R. Machine Learning-Based CYGNSS Soil Moisture Estimates over ISMN sites in CONUS. Remote Sens. 2020, 12, 1168. [Google Scholar] [CrossRef] [Green Version]
- Park, J.; Johnson, J.T.; Yi, Y.; O’Brien, A. Using “Rapid Revisit” CYGNSS Wind Speed Measurements to Detect Convective Activity. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 98–106. [Google Scholar] [CrossRef]
- Comite, D.; Ticconi, F.; Dente, L.; Guerriero, L.; Pierdicca, N. Bistatic Coherent Scattering From Rough Soils With Application to GNSS Reflectometry. IEEE Trans. Geosci. Remote Sens. 2019, 58, 612–625. [Google Scholar] [CrossRef]
- Gleason, S.; O’Brien, A.; Russel, A.; Al-Khaldi, M.M.; Johnson, J.T. Geolocation, Calibration and Surface Resolution of CYGNSS GNSS-R Land Observations. Remote Sens. 2020, 12, 1317. [Google Scholar] [CrossRef] [Green Version]
- Katzberg, S.J.; Garrison, J.L. Utilizing GPS to Determine Ionospheric Delay over the Ocean. NASA Tech. Memo. TM-4750 1996, 1–16. [Google Scholar]
- Hornbuckle, B.; Walker, V.; Eichinger, B.; Wallace, V.; Yildirim, E. Soil surface roughness observed during SMAPVEX16-IA and its potential consequences for SMOS and SMAP. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS)2, Fort Worth, TX, USA, 23–28 July 2017. [Google Scholar]
- Snapir, B.; Hobbs, S.; Waine, T.W. Roughness measurements over an agricultural soil surface with Structure from Motion. ISPRS J. Photogramm. Remote Sens. 2014, 96, 210–223. [Google Scholar] [CrossRef]
- Thomsen, L.M.; Baartman, J.E.M.; Barneveld, R.J.; Starkloff, T.; Stolte, J. Soil surface roughness: Comparing old and new measuring methods and application in a soil erosion model. SOIL 2015, 1, 399–410. [Google Scholar] [CrossRef] [Green Version]
- Dente, L.; Guerriero, L.; Comite, D.; Pierdicca, N. Space-Borne GNSS-R Signal Over a Complex Topography: Modeling and Validation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 1218–1233. [Google Scholar] [CrossRef]
- Campbell, J.D.; Melebari, A.; Moghaddam, M. Modeling the effects of topography on delay-Doppler maps. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020. [Google Scholar] [CrossRef]
- O’Neill, P.E.; Chan, S.; Njoku, E.G.; Jackson, T.; Bindlish, R. SMAP L3 Radiometer Global Daily 36 km EASE-Grid Soil Moisture, Version 5; National Snow and Ice Data Center: Boulder, CO, USA, 2018. [Google Scholar]
- Burgin, M.S.; Colliander, A.; Njoku, E.G.; Chan, S.K.; Cabot, F.; Kerr, Y.H.; Bindlish, R.; Jackson, T.J.; Entekhabi, D.; Yueh, S.H. A Comparative Study of the SMAP Passive Soil Moisture Product with Existing Satellite-Based Soil Moisture Products. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2959–2971. [Google Scholar] [CrossRef]
- Colliander, A.; Jackson, T.J.; Bindlish, R.; Chan, S.; Das, N.; Kim, S.B.; Cosh, M.H.; Dunbar, R.S.; Dang, L.; Pashaian, L.; et al. Validation of SMAP surface soil moisture products with core validation sites. Remote Sens. Environ. 2017, 191, 215–231. [Google Scholar] [CrossRef]
- Fuks, I.M. Wave diffraction by a rough boundary of an arbitrary plane-layered medium. IEEE Trans. Antennas Propag. 2001, 49, 630–639. [Google Scholar] [CrossRef]
- Voosen, P. Satellites see hurricane winds despite military signal tweaks. Science 2019, 364, 1019. [Google Scholar] [CrossRef] [PubMed]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef] [PubMed]
- Zreda, M.; Desilets, D.; Ferre, T.P.A.; Scott, R.L. Measuring soil moisture content non-invasively at intermediate spatial scale using cosmic-ray neutrons. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef] [Green Version]
- Small, E.E.; Larson, K.M.; Chew, C.C.; Dong, J.; Ochsner, T.E. Validation of GPS-IR Soil Moisture Retrievals: Comparison of Different Algorithms to Remove Vegetation Effects. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 1–12. [Google Scholar] [CrossRef]
- Schaefer, G.L.; Cosh, M.H.; Jackson, T.J. The USDA Natural Resources Conservation Service Soil Climate Analysis Network (SCAN). J. Atmos. Ocean. Technol. 2007, 2073–2077. [Google Scholar] [CrossRef]
- Schaefer, G.L.; Paetzold, R.R. SNOTEL (SNOwpack TELemetry) And SCAN (Soil Climate Analysis Network). In Proceedings of the Automated Weather Stations for Applications in Agriculture and Water Resources Management: Current Use and Future Perspectives, Lincoln, NB, USA, 6–10 March 2000. [Google Scholar]
- Diamond, H.J.; Karl, T.R.; Palecki, M.A.; Baker, C.B.; Bell, J.E.; Leeper, R.D.; Easterling, D.R.; Lawrimore, J.H.; Meyers, T.P.; Helfert, M.R.; et al. U.S. Climate Reference Network after one decade of operations: Status and assessment. Bull. Am. Meteorol. Soc. 2013, 94, 489–498. [Google Scholar] [CrossRef]
- Smith, A.B.; Walker, J.P.; Western, A.W.; Young, R.I.; Ellett, K.M.; Pipunic, R.C.; Grayson, R.B.; Siriwidena, L.; Chiew, F.H.S.; Richter, H. The Murrumbidgee Soil Moisture Monitoring Network Data Set. Water Resour. Res. 2012, 48. [Google Scholar] [CrossRef]
- Chen, Q.; Zeng, J.; Cui, C.; Li, Z.; Chen, K.S.; Bai, X.; Xu, J. Soil Moisture Retrieval from SMAP: A Validation and Error Analysis Study Using Ground-Based Observations over the Little Washita Watershed. IEEE Trans. Geosci. Remote Sens. 2018, 56, 1398–1408. [Google Scholar] [CrossRef]















| ubRMSE (cm3 cm−3) | r | |||||||
|---|---|---|---|---|---|---|---|---|
| Median | Standard Deviation | Median | Standard Deviation | |||||
| CYGNSS | SMAP | CYGNSS | SMAP | CYGNSS | SMAP | CYGNSS | SMAP | |
| All (n = 171) | 0.049 | 0.045 | 0.026 | 0.025 | 0.40 | 0.69 | 0.27 | 0.27 |
| COSMOS (n = 11) | 0.054 | 0.040 | 0.026 | 0.020 | 0.39 | 0.69 | 0.19 | 0.22 |
| PBOH2O (n = 46) | 0.033 | 0.024 | 0.019 | 0.025 | 0.14 | 0.58 | 0.26 | 0.36 |
| SCAN (n = 63) | 0.051 | 0.048 | 0.023 | 0.021 | 0.55 | 0.78 | 0.20 | 0.16 |
| SNOTEL (n = 11) | 0.089 | 0.082 | 0.016 | 0.020 | 0.10 | 0.36 | 0.18 | 0.15 |
| USCRN (n = 38) | 0.055 | 0.047 | 0.024 | 0.022 | 0.45 | 0.71 | 0.23 | 0.26 |
| OzNet (n = 2) | 0.043 | 0.058 | 0.006 | 0.013 | 0.68 | 0.68 | 0.02 | 0.02 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chew, C.; Small, E. Description of the UCAR/CU Soil Moisture Product. Remote Sens. 2020, 12, 1558. https://doi.org/10.3390/rs12101558
Chew C, Small E. Description of the UCAR/CU Soil Moisture Product. Remote Sensing. 2020; 12(10):1558. https://doi.org/10.3390/rs12101558
Chicago/Turabian StyleChew, Clara, and Eric Small. 2020. "Description of the UCAR/CU Soil Moisture Product" Remote Sensing 12, no. 10: 1558. https://doi.org/10.3390/rs12101558
APA StyleChew, C., & Small, E. (2020). Description of the UCAR/CU Soil Moisture Product. Remote Sensing, 12(10), 1558. https://doi.org/10.3390/rs12101558