Apple Shape Detection Based on Geometric and Radiometric Features Using a LiDAR Laser Scanner





Abstract
:
1. Introduction
2. Materials and Methods
2.1. Site Description
2.2. Data Acquisition and Pre-Processing
2.3. Apple Detection Methodology
2.3.1. Extraction of Radiometric and Geometric Features
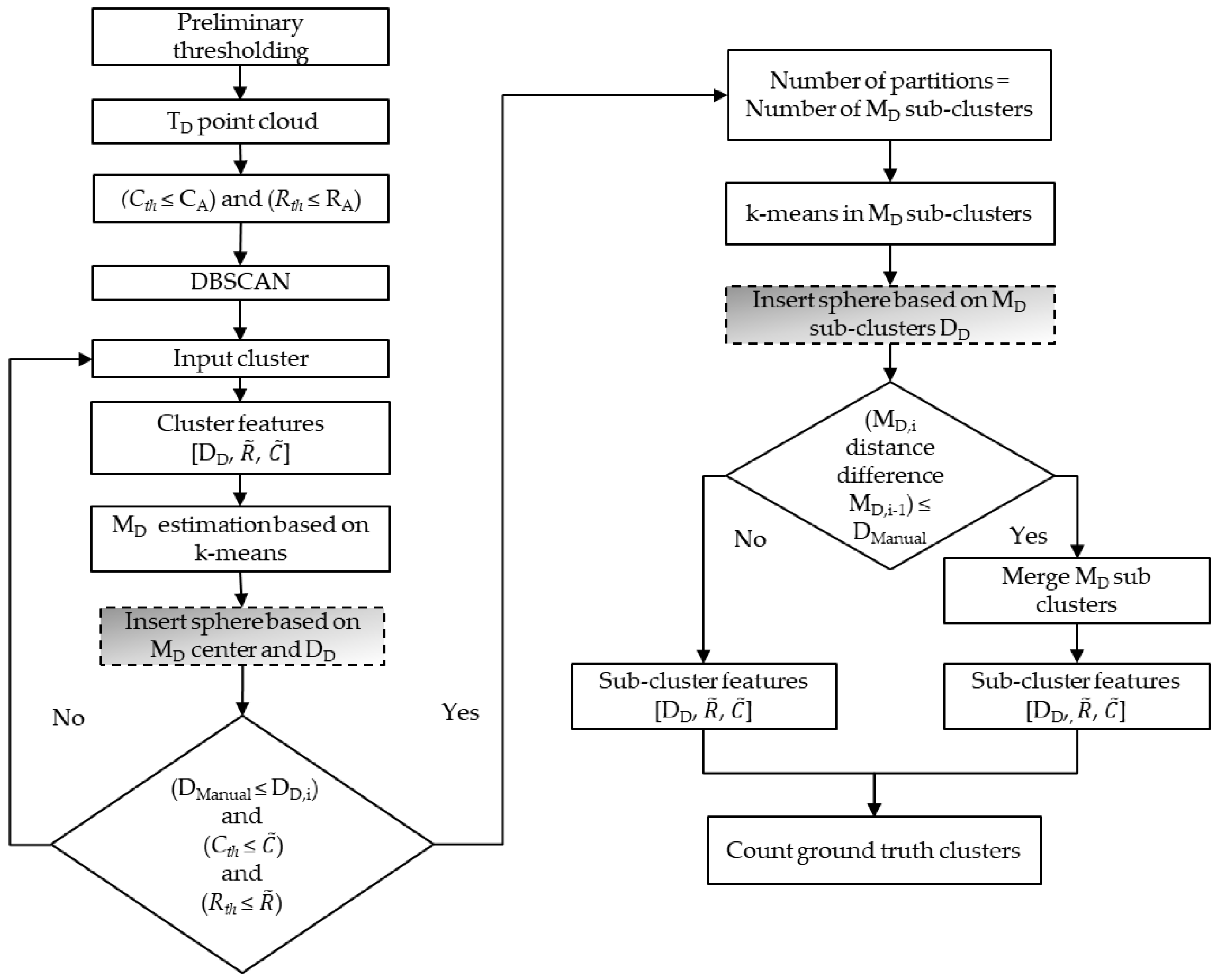
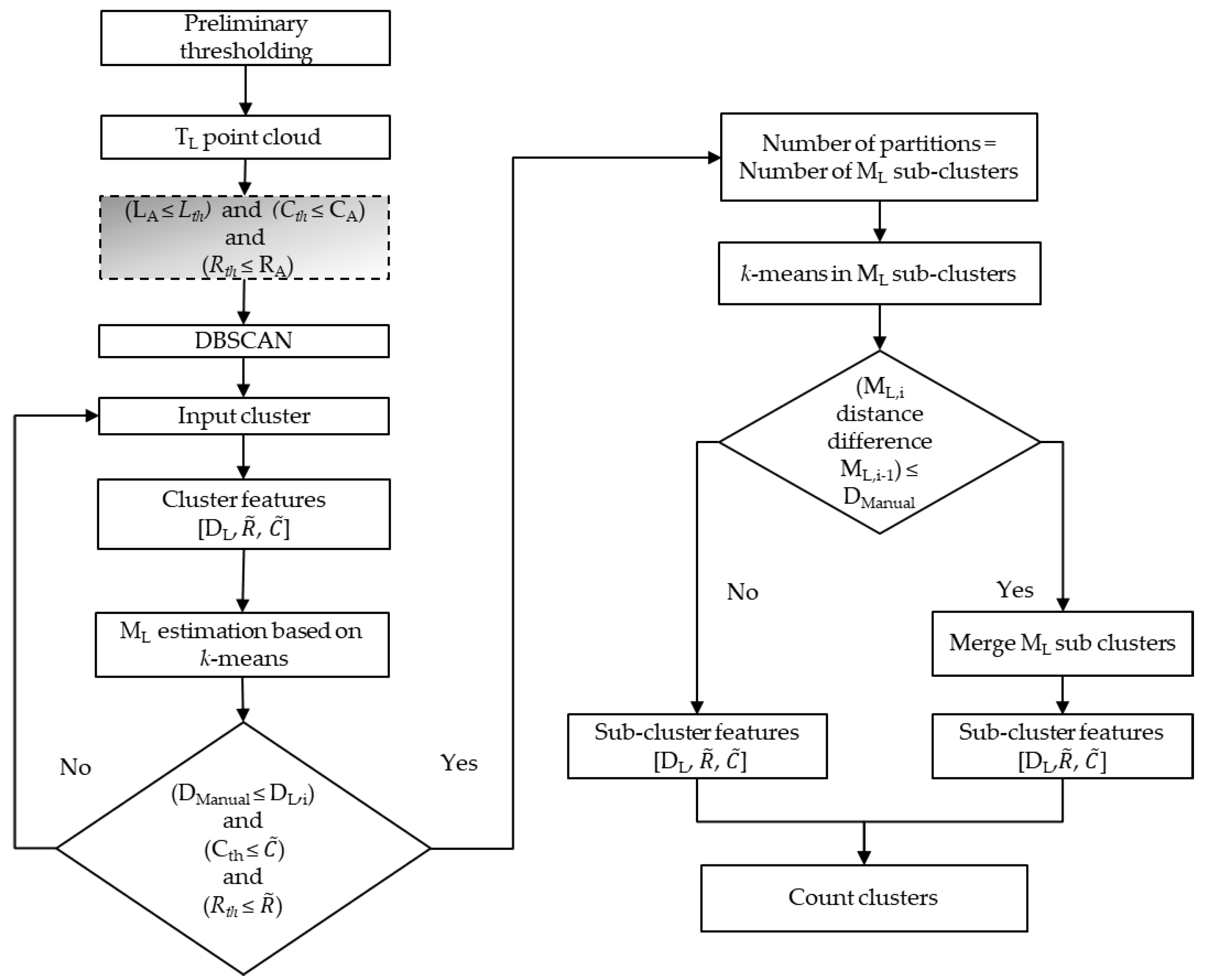
2.3.2. Apple Segmentation
2.4. Evaluation
3. Results
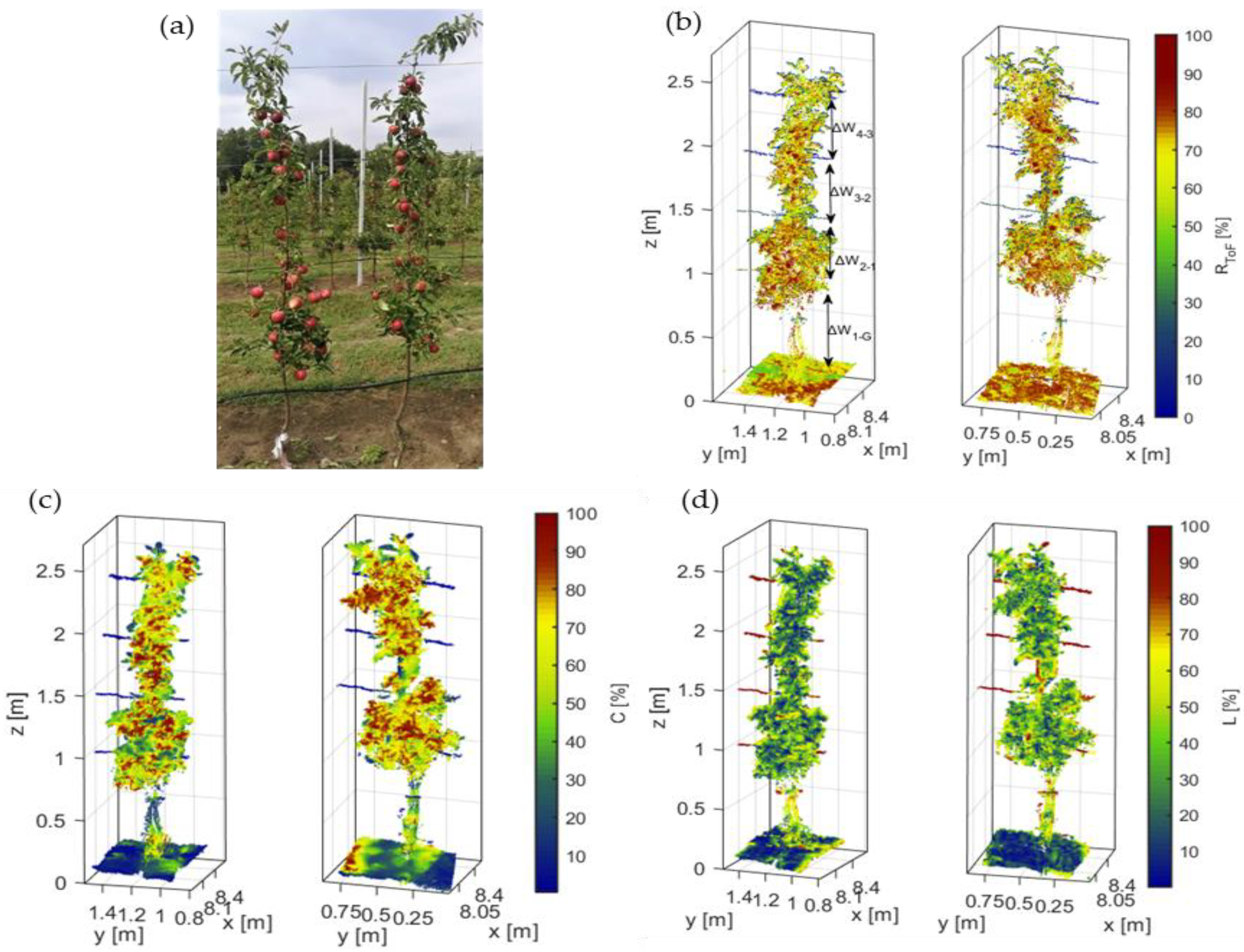
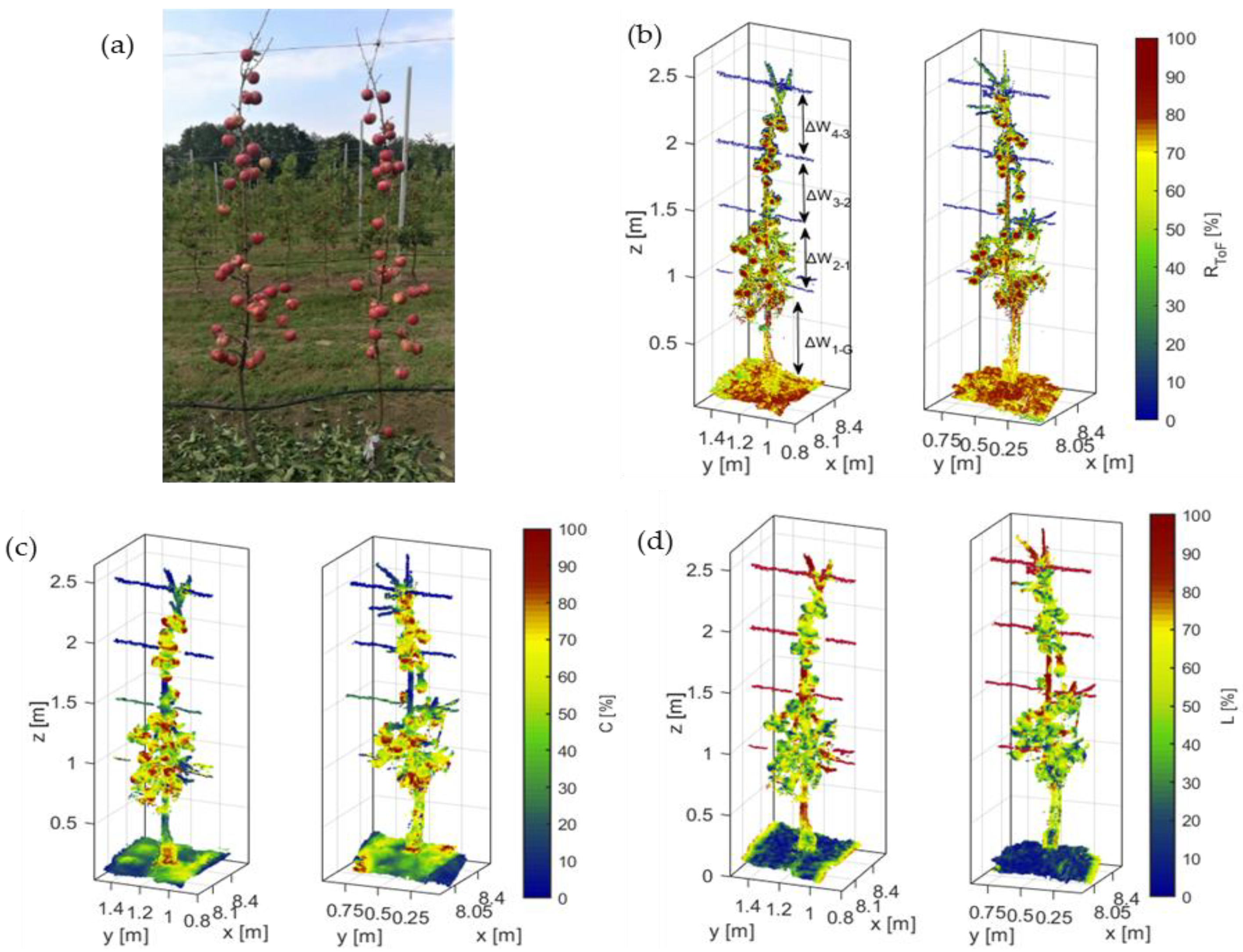
3.1. Apple Segmentation
3.2. Evaluation
4. Discussion
4.1. Segmentation
4.2. Evaluation
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AD | Points of apple class on defoliated trees |
| AL | Points of apple class on trees with leaves |
| C | Curvature estimated by eigenvalues [%] |
| Mean value of curvature in defoliated trees [%] | |
| CA | Curvature of apple class [%] |
| CL | Curvature of leaf class [%] |
| CW | Curvature of wood class [%] |
| Cth | Curvature threshold with the highest likelihood within the apple class [%] |
| Cov | Covariance matrix of the k-nearest neighbors points, Pi |
| DManual | Manually measured diameter of apples [mm] |
| DD | Estimated diameter of apple cluster or subcluster in defoliated trees [mm] |
| DL | Estimated diameter of apple cluster or subcluster in foliated trees [mm] |
| DAFB | Days after full bloom |
| FN | False negatives |
| FP | False positives |
| K | Total number of point set defined from k-nearest neighbors algorithm |
| L | Linearity estimated by eigenvalues [%] |
| LA | Linearity of apple class [%] |
| LL | Linearity of leaf class [%] |
| LW | Linearity of wood class [%] |
| Lth | Linearity threshold with the highest likelihood within apple class [%] |
| MD | Center of fruit points created by k-means clustering in defoliated trees |
| ML | Center of apple created by k-means clustering in foliated trees |
| MAE | Mean absolute error [mm] |
| MBE | Mean bias error [mm] |
| N | The sum of true positives, true negatives, false positives, false negatives |
| n | Total number of samples |
| nD | Total number of apple clusters in defoliated trees. |
| nManual | Total number of manually counted apples |
| Pi | Set of points defined from k-nearest neighbors algorithm |
| Average of set of points defined from k-nearest neighbors algorithm | |
| r | Radius used in the k-nearest neighbors [mm] |
| RToF | Apparent reflectance intensity at 905 nm of LiDAR laser scanner [%] |
| Mean value of apparent reflectance intensity in defoliated trees [%] | |
| RA | Apparent reflectance intensity of apple class [%] |
| RL | Apparent reflectance intensity of leaf class [%] |
| RW | Apparent reflectance intensity of wood class [%] |
| Rth | Apparent reflectance intensity threshold with the highest likelihood within the apple class [%] |
| RMSE | Root mean square error [%] |
| Rmin | Reflectance of board target coated with urethane [%] |
| Rmax | Reflectance of board target coated with barium sulphate [%] |
| ToF | Time of flight |
| TD | Trees after defoliation |
| TL | Trees before defoliation |
| TN | True negatives |
| TP | True positives |
| W1, W2, W3, W4 | Four horizontally parallel wires supporting the trees |
| ΔW | Tree region between the ground and W1, W2, W3, W4 |
| [] | Points in three dimensions |
| ε | Search radius used in density-based scan algorithm |
| Eigenvalues calculated from the covariance matrix |
References
- Zude-Sasse, M.; Fountas, S.; Gemtos, T.A.; Abu-Khalaf, N. Applications of precision agriculture in horticultural crops. Eur. J. Hortic. Sci. 2016, 81, 78–90. [Google Scholar] [CrossRef]
- Gemtos, T.; Fountas, S.; Tagarakis, A.; Liakos, V. Precision agriculture application in fruit crops: Experience in handpicked fruits. Procedia Technol. 2013. [Google Scholar] [CrossRef] [Green Version]
- Mosleh, M.K.; Hassan, Q.K.; Chowdhury, E.H. Application of remote sensors in mapping rice area and forecasting its production: A review. Sensors 2015, 15, 769–791. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, C.; Anderson, G.L. Mapping grain sorghum yield variability using airborne digital videography. Precis. Agric. 2000, 2, 7–23. [Google Scholar] [CrossRef]
- Pantazi, X.E.; Moshou, D.; Alexandridis, T.; Whetton, R.L.; Mouazen, A.M. Wheat yield prediction using machine learning and advanced sensing techniques. Comput. Electron. Agric. 2016, 121, 57–65. [Google Scholar] [CrossRef]
- Schwalbert, R.A.; Amado, T.J.C.; Nieto, L.; Varela, S.; Corassa, G.M.; Horbe, T.A.N.; Rice, C.W.; Peralta, N.R.; Ciampitti, I.A. Forecasting maize yield at field scale based on high-resolution satellite imagery. Biosyst. Eng. 2018, 171, 179–192. [Google Scholar] [CrossRef]
- Tsoulias, N.; Paraforos, D.S.; Fountas, S.; Zude-Sasse, M. Calculating the water deficit spatially using LiDAR laser scanner in an apple orchard. In Precision Agriculture 2019—Papers, Proceedings of the 12th European Conference on Precision Agriculture, ECPA 2019, Montpellier, France, 8–11 July 2019; Wageningen Academic Publishers: Wageningen, The Netherlands, 2019. [Google Scholar]
- Gongal, A.; Amatya, S.; Karkee, M.; Zhang, Q.; Lewis, K. Sensors and systems for fruit detection and localization: A review. Comput. Electron. Agric. 2015, 116, 8–19. [Google Scholar] [CrossRef]
- Linker, R. A procedure for estimating the number of green mature apples in night-time orchard images using light distribution and its application to yield estimation. Precis. Agric. 2017, 18, 59–75. [Google Scholar] [CrossRef]
- Bargoti, S.; Underwood, J. Deep fruit detection in orchards. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3626–3633. [Google Scholar] [CrossRef] [Green Version]
- Dorj, U.O.; Lee, M.; Yun, S.S. An yield estimation in citrus orchards via fruit detection and counting using image processing. Comput. Electron. Agric. 2017, 140, 103–112. [Google Scholar] [CrossRef]
- Sengupta, S.; Lee, W.S. Identification and determination of the number of immature green citrus fruit in a canopy under different ambient light conditions. Biosyst. Eng. 2014. [Google Scholar] [CrossRef]
- Qureshi, W.S.; Payne, A.; Walsh, K.B.; Linker, R.; Cohen, O.; Dailey, M.N. Machine vision for counting fruit on mango tree canopies. Precis. Agric. 2017, 18, 224–244. [Google Scholar] [CrossRef]
- Luo, L.; Tang, Y.; Zou, X.; Wang, C.; Zhang, P.; Feng, W. Robust Grape Cluster Detection in a Vineyard by Combining the AdaBoost Framework and Multiple Color Components. Sensors 2016, 16, 2098. [Google Scholar] [CrossRef] [PubMed]
- Linker, R.; Cohen, O.; Naor, A. Determination of the number of green apples in RGB images recorded in orchards. Comput. Electron. Agric. 2012, 81, 45–57. [Google Scholar] [CrossRef]
- Kurtulmus, F.; Lee, W.S.; Vardar, A. Immature peach detection in colour images acquired in natural illumination conditions using statistical classifiers and neural network. Precis. Agric. 2014. [Google Scholar] [CrossRef]
- Wachs, J.P.; Stern, H.I.; Burks, T.; Alchanatis, V. Low and high-level visual feature-based apple detection from multi-modal images. Precis. Agric. 2010. [Google Scholar] [CrossRef]
- Gan, H.; Lee, W.S.; Alchanatis, V.; Ehsani, R.; Schueller, J.K. Immature green citrus fruit detection using color and thermal images. Comput. Electron. Agric. 2018, 152, 117–125. [Google Scholar] [CrossRef]
- Zude, M. Comparison of indices and multivariate models to non-destructively predict the fruit chlorophyll by means of visible spectrometry in apple fruit. Anal. Chim. Acta 2003. [Google Scholar] [CrossRef]
- Sa, I.; Ge, Z.; Dayoub, F.; Upcroft, B.; Perez, T.; McCool, C. Deepfruits: A fruit detection system using deep neural networks. Sensors 2016, 16, 1222. [Google Scholar] [CrossRef] [Green Version]
- Feng, J.; Zeng, L.; He, L. Apple fruit recognition algorithm based on multi-spectral dynamic image analysis. Sensors 2019, 19, 949. [Google Scholar] [CrossRef] [Green Version]
- Taylor, J.A.; Dresser, J.L.; Hickey, C.C.; Nuske, S.T.; Bates, T.R. Considerations on spatial crop load mapping. Aust. J. Grape Wine Res. 2019, 25, 144–155. [Google Scholar] [CrossRef]
- Gutiérrez, S.; Wendel, A.; Underwood, J. Ground based hyperspectral imaging for extensive mango yield estimation. Comput. Electron. Agric. 2019, 157, 126–135. [Google Scholar] [CrossRef]
- Vázquez-Arellano, M.; Griepentrog, H.W.; Reiser, D.; Paraforos, D.S. 3-D imaging systems for agricultural applications—A review. Sensors 2016, 16, 618. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gené-Mola, J.; Vilaplana, V.; Rosell-Polo, J.R.; Morros, J.R.; Ruiz-Hidalgo, J.; Gregorio, E. Multi-modal deep learning for Fuji apple detection using RGB-D cameras and their radiometric capabilities. Comput. Electron. Agric. 2019, 162, 689–698. [Google Scholar] [CrossRef]
- Wang, Z.; Walsh, K.B.; Verma, B. On-tree mango fruit size estimation using RGB-D images. Sensors 2017, 17, 2738. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kashani, A.G.; Olsen, M.J.; Parrish, C.E.; Wilson, N. A review of LIDAR radiometric processing: From ad hoc intensity correction to rigorous radiometric calibration. Sensors 2015, 15, 28099–28128. [Google Scholar] [CrossRef] [Green Version]
- Barnea, E.; Mairon, R.; Ben-Shahar, O. Colour-agnostic shape-based 3D fruit detection for crop harvesting robots. Biosyst. Eng. 2016, 146, 57–70. [Google Scholar] [CrossRef]
- Brodu, N.; Lague, D. 3D terrestrial lidar data classification of complex natural scenes using a multi-scale dimensionality criterion: Applications in geomorphology. ISPRS J. Photogramm. Remote Sens. 2012, 68, 121–134. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Skidmore, A.K.; Darvishzadeh, R.; Niemann, K.O.; Liu, J.; Shi, Y.; Wang, T. Foliar and woody materials discriminated using terrestrial LiDAR in a mixed natural forest. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 43–50. [Google Scholar] [CrossRef]
- Ma, L.; Zheng, G.; Eitel, J.U.H.; Moskal, L.M.; He, W.; Huang, H. Improved salient feature-based approach for automatically separating photosynthetic and nonphotosynthetic components within terrestrial Lidar point cloud data of forest canopies. IEEE Trans. Geosci. Remote Sens. 2016. [Google Scholar] [CrossRef]
- Kuo, K.; Itakura, K.; Hosoi, F. Leaf segmentation based on k-means algorithm to obtain leaf angle distribution using terrestrial LiDAR. Remote Sens. 2019, 11, 2536. [Google Scholar] [CrossRef] [Green Version]
- Gené-Mola, J.; Gregorio, E.; Guevara, J.; Auat, F.; Sanz-Cortiella, R.; Escolà, A.; Llorens, J.; Morros, J.R.; Ruiz-Hidalgo, J.; Vilaplana, V.; et al. Fruit detection in an apple orchard using a mobile terrestrial laser scanner. Biosyst. Eng. 2019, 187, 171–184. [Google Scholar] [CrossRef]
- Sun, S.; Li, C.; Chee, P.W.; Paterson, A.H.; Jiang, Y.; Xu, R.; Robertson, J.S.; Adhikari, J.; Shehzad, T. Three-dimensional photogrammetric mapping of cotton bolls in situ based on point cloud segmentation and clustering. ISPRS J. Photogramm. Remote Sens. 2020, 160, 195–207. [Google Scholar] [CrossRef]
- Tao, Y.; Zhou, J. Automatic apple recognition based on the fusion of color and 3D feature for robotic fruit picking. Comput. Electron. Agric. 2017, 142, 388–396. [Google Scholar] [CrossRef]
- Lin, G.; Tang, Y.; Zou, X.; Xiong, J.; Fang, Y. Color-, depth-, and shape-based 3D fruit detection. Precis. Agric. 2020, 21, 1–17. [Google Scholar] [CrossRef]
- Tsoulias, N.; Paraforos, D.S.; Fountas, S.; Zude-Sasse, M. Estimating canopy parameters based on the stem position in apple trees using a 2D lidar. Agronomy 2019, 9, 740. [Google Scholar] [CrossRef] [Green Version]
- Soudarissanane, S.; Lindenbergh, R.; Menenti, M.; Teunissen, P. Scanning geometry: Influencing factor on the quality of terrestrial laser scanning points. ISPRS J. Photogramm. Remote Sens. 2011, 66, 389–399. [Google Scholar] [CrossRef]
- Kaasalainen, S.; Krooks, A.; Kukko, A.; Kaartinen, H. Radiometric calibration of terrestrial laser scanners withexternal reference targets. Remote Sens. 2009, 1, 144–158. [Google Scholar] [CrossRef] [Green Version]
- Kooi, B. MTi User Manual; MTi 10-Series and MTi 100-Series; Doc. MT0605P.B; Xsens Technologies: Enschede, The Netherlands, 2016; pp. 35–36. [Google Scholar]
- Vázquez-Arellano, M.; Reiser, D.; Paraforos, D.S.; Garrido-Izard, M.; Burce, M.E.C.; Griepentrog, H.W. 3-D reconstruction of maize plants using a time-of-flight camera. Comput. Electron. Agric. 2018, 145, 235–247. [Google Scholar] [CrossRef]
- Sadar, N.; Urbanek-Krajnc, A.; Unuk, T. Spectrophotometrically determined pigment contents of intact apple fruits and their relations with quality: A review. Zemdirbyste 2013. [Google Scholar] [CrossRef] [Green Version]
- Hackel, T.; Wegner, J.D.; Schindler, K. Contour detection in unstructured 3D point clouds. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 1610–1618. [Google Scholar] [CrossRef]
- Lin, C.H.; Chen, J.Y.; Su, P.L.; Chen, C.H. Eigen-feature analysis of weighted covariance matrices for LiDAR point cloud classification. ISPRS J. Photogramm. Remote Sens. 2014, 94, 70–79. [Google Scholar] [CrossRef]
- Koenig, K.; Höfle, B.; Hämmerle, M.; Jarmer, T.; Siegmann, B.; Lilienthal, H. Comparative classification analysis of post-harvest growth detection from terrestrial LiDAR point clouds in precision agriculture. ISPRS J. Photogramm. Remote Sens. 2015. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.-P.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the 2nd International Conference on Knowledge Discovery and Data Mining, Oregon, Portland, 2–4 August 1996. [Google Scholar]
- Kaasalainen, S.; Jaakkola, A.; Kaasalainen, M.; Krooks, A.; Kukko, A. Analysis of incidence angle and distance effects on terrestrial laser scanner intensity: Search for correction methods. Remote Sens. 2011, 3, 2207–2221. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Wang, T.; Skidmore, A.K.; Darvishzadeh, R.; Niemann, K.O.; Liu, J. Canopy leaf water content estimated using terrestrial LiDAR. Agric. For. Meteorol. 2017. [Google Scholar] [CrossRef]
- Gongal, A.; Karkee, M.; Amatya, S. Apple fruit size estimation using a 3D machine vision system. Inf. Process. Agric. 2018, 5, 498–503. [Google Scholar] [CrossRef]
- Mack, J.; Lenz, C.; Teutrine, J.; Steinhage, V. High-precision 3D detection and reconstruction of grapes from laser range data for efficient phenotyping based on supervised learning. Comput. Electron. Agric. 2017. [Google Scholar] [CrossRef]
- Rakun, J.; Stajnko, D.; Zazula, D. Detecting fruits in natural scenes by using spatial-frequency based texture analysis and multiview geometry. Comput. Electron. Agric. 2011, 76, 80–88. [Google Scholar] [CrossRef]
- Méndez, V.; Pérez-Romero, A.; Sola-Guirado, R.; Miranda-Fuentes, A.; Manzano-Agugliaro, F.; Zapata-Sierra, A.; Rodríguez-Lizana, A. In-field estimation of orange number and size by 3D laser scanning. Agronomy 2019, 9, 885. [Google Scholar] [CrossRef] [Green Version]
- Stajnko, D.; Lakota, M.; Hočevar, M. Estimation of number and diameter of apple fruits in an orchard during the growing season by thermal imaging. Comput. Electron. Agric. 2004. [Google Scholar] [CrossRef]
- Kurtulmus, F.; Lee, W.S.; Vardar, A. Green citrus detection using “eigenfruit”, color and circular Gabor texture features under natural outdoor conditions. Comput. Electron. Agric. 2011. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DManual [mm] | DD [mm] | MBE [mm] | MAE [mm] | RMSE [%] | R2adj | ||
|---|---|---|---|---|---|---|---|
| DAFB42 | ΔW1-G | 32.0 | 47.6 | 6.5 | 7.4 | 10.8 | 0.46 |
| ΔW2-1 | 36.1 | 65.1 | 7.5 | 8.7 | 12.0 | 0.45 | |
| ΔW3-2 | 39.2 | 47.9 | 4.7 | 5.5 | 7.2 | 0.69 | |
| ΔW4-3 | 39.3 | 41.2 | 5.3 | 6.2 | 6.6 | 0.74 | |
| DAFB72 | ΔW1-G | 66.4 | 48.0 | −10.7 | 12.4 | 14.5 | 0.42 |
| ΔW2-1 | 62.8 | 37.9 | −9.11 | 10.5 | 15.8 | 0.38 | |
| ΔW3-2 | 65.6 | 63.7 | −3.2 | 4.6 | 5.7 | 0.81 | |
| ΔW4-3 | 67.0 | 63.7 | −3.8 | 4.4 | 5.9 | 0.82 | |
| DAFB104 | ΔW1-G | 74.8 | 70.3 | −5.8 | 8.3 | 9.6 | 0.55 |
| ΔW2-1 | 71.1 | 69.5 | −4.5 | 5.1 | 7.8 | 0.66 | |
| ΔW3-2 | 69.6 | 68.7 | −3.3 | 3.8 | 4.5 | 0.90 | |
| ΔW4-3 | 74.8 | 70.3 | −3.2 | 3.5 | 4.1 | 0.95 | |
| DAFB120 | ΔW1-G | 69.3 | 67.3 | −6.1 | 7.1 | 7.7 | 0.67 |
| ΔW2-1 | 70.5 | 68.4 | −5.6 | 6.5 | 6.8 | 0.74 | |
| ΔW3-2 | 69.7 | 68.6 | −4.3 | 4.9 | 5.8 | 0.81 | |
| ΔW4-3 | 68.6 | 66.4 | −5.3 | 6.1 | 6.6 | 0.75 |
| nManual | nD | TP | Accuracy [%] | Precision [%] | Recall [%] | F1 [%] | ||
|---|---|---|---|---|---|---|---|---|
| DAFB42 | ΔW1-G | 10 | 10 | 9 | 76.9 | 80.0 | 83.8 | 81.8 |
| ΔW2-1 | 19 | 18 | 16 | 85.2 | 82.6 | 86.3 | 84.4 | |
| ΔW3-2 | 34 | 34 | 30 | 74.5 | 75.6 | 83.7 | 79.4 | |
| ΔW4-3 | 17 | 17 | 15 | 76.9 | 85.0 | 89.4 | 87.1 | |
| DAFB72, | ΔW1-G | 6 | 6 | 6 | 71.4 | 85.7 | 80.8 | 83.1 |
| ΔW2-1 | 15 | 14 | 12 | 75.1 | 82.8 | 82.3 | 82.5 | |
| ΔW3-2 | 14 | 14 | 12 | 73.3 | 83.3 | 86.6 | 84.9 | |
| ΔW4-3 | 7 | 7 | 5 | 65.8 | 71.4 | 83.3 | 76.9 | |
| DAFB104, | ΔW1-G | 11 | 11 | 9 | 77.2 | 81.1 | 88.8 | 84.7 |
| ΔW2-1 | 18 | 18 | 16 | 84.1 | 85.7 | 81.8 | 83.3 | |
| ΔW3-2 | 11 | 11 | 10 | 82.5 | 85.7 | 87.0 | 86.3 | |
| ΔW4-3 | 12 | 12 | 11 | 80.2 | 86.6 | 88.5 | 87.5 | |
| DAFB120 | ΔW1-G | 15 | 15 | 14 | 73.4 | 78.9 | 83.3 | 81.1 |
| ΔW2-1 | 32 | 31 | 28 | 76.4 | 82.2 | 84.2 | 83.1 | |
| ΔW3-2 | 16 | 16 | 16 | 75.5 | 85.7 | 88.0 | 86.8 | |
| ΔW4-3 | 15 | 15 | 15 | 88.9 | 88.2 | 91.0 | 89.5 |
| MD–ML [mm] | SD [mm] | RMSE [%] | DD–DL [mm] | SD [mm] | RMSE [%] | |
|---|---|---|---|---|---|---|
| DAFB42 | 0.2 | 0.22 | 19.9 | 22.3 | 0.3 | 16.3 |
| DAFB72 | 0.1 | 0.1 | 15.1 | 12.6 | 0.2 | 13.7 |
| DAFB104 | 0.1 | 0.1 | 6.7 | 11.3 | 0.2 | 10.3 |
| DAFB120 | 0.1 | 0.1 | 5.7 | 8.7 | 0.1 | 9.5 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsoulias, N.; Paraforos, D.S.; Xanthopoulos, G.; Zude-Sasse, M. Apple Shape Detection Based on Geometric and Radiometric Features Using a LiDAR Laser Scanner. Remote Sens. 2020, 12, 2481. https://doi.org/10.3390/rs12152481
Tsoulias N, Paraforos DS, Xanthopoulos G, Zude-Sasse M. Apple Shape Detection Based on Geometric and Radiometric Features Using a LiDAR Laser Scanner. Remote Sensing. 2020; 12(15):2481. https://doi.org/10.3390/rs12152481
Chicago/Turabian StyleTsoulias, Nikos, Dimitrios S. Paraforos, George Xanthopoulos, and Manuela Zude-Sasse. 2020. "Apple Shape Detection Based on Geometric and Radiometric Features Using a LiDAR Laser Scanner" Remote Sensing 12, no. 15: 2481. https://doi.org/10.3390/rs12152481
APA StyleTsoulias, N., Paraforos, D. S., Xanthopoulos, G., & Zude-Sasse, M. (2020). Apple Shape Detection Based on Geometric and Radiometric Features Using a LiDAR Laser Scanner. Remote Sensing, 12(15), 2481. https://doi.org/10.3390/rs12152481